
Enhancing Kármán Vortex Street Detection via Auxiliary Networks Incorporating Key Atmospheric Parameters


Abstract
1. Introduction
2. Data and Methods
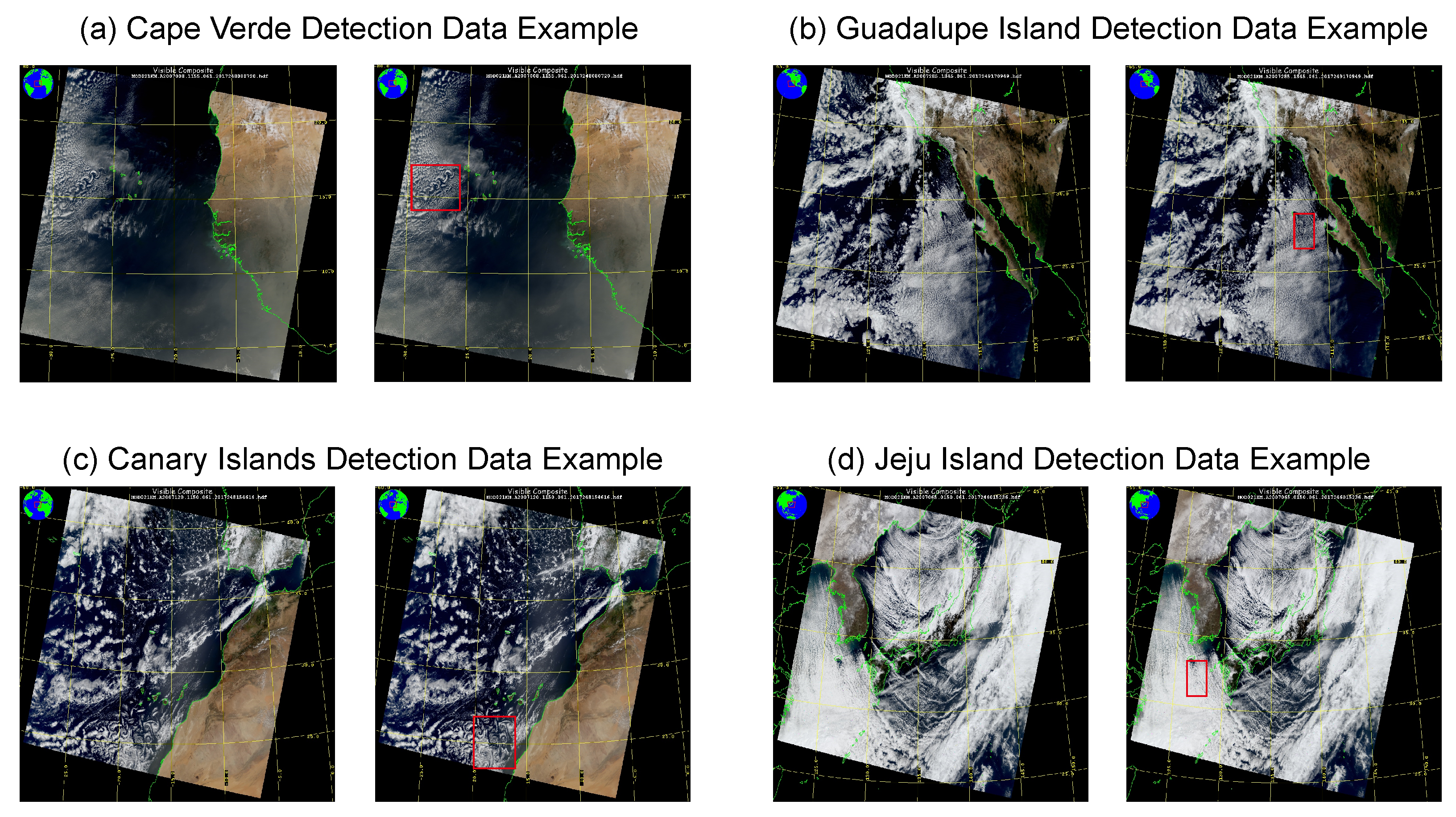
2.1. Object Detection Imgaery Dateset
2.2. Atmospheric Parameter Dataset
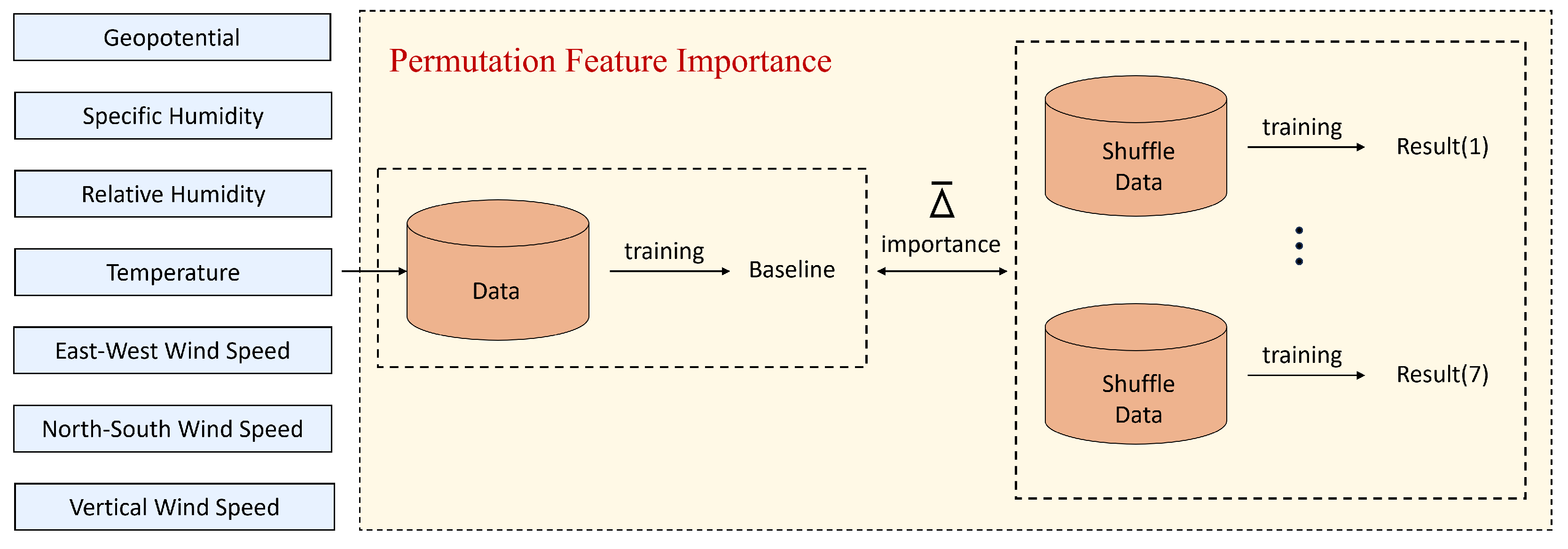
2.3. Permutation Feature Importance (PFI)
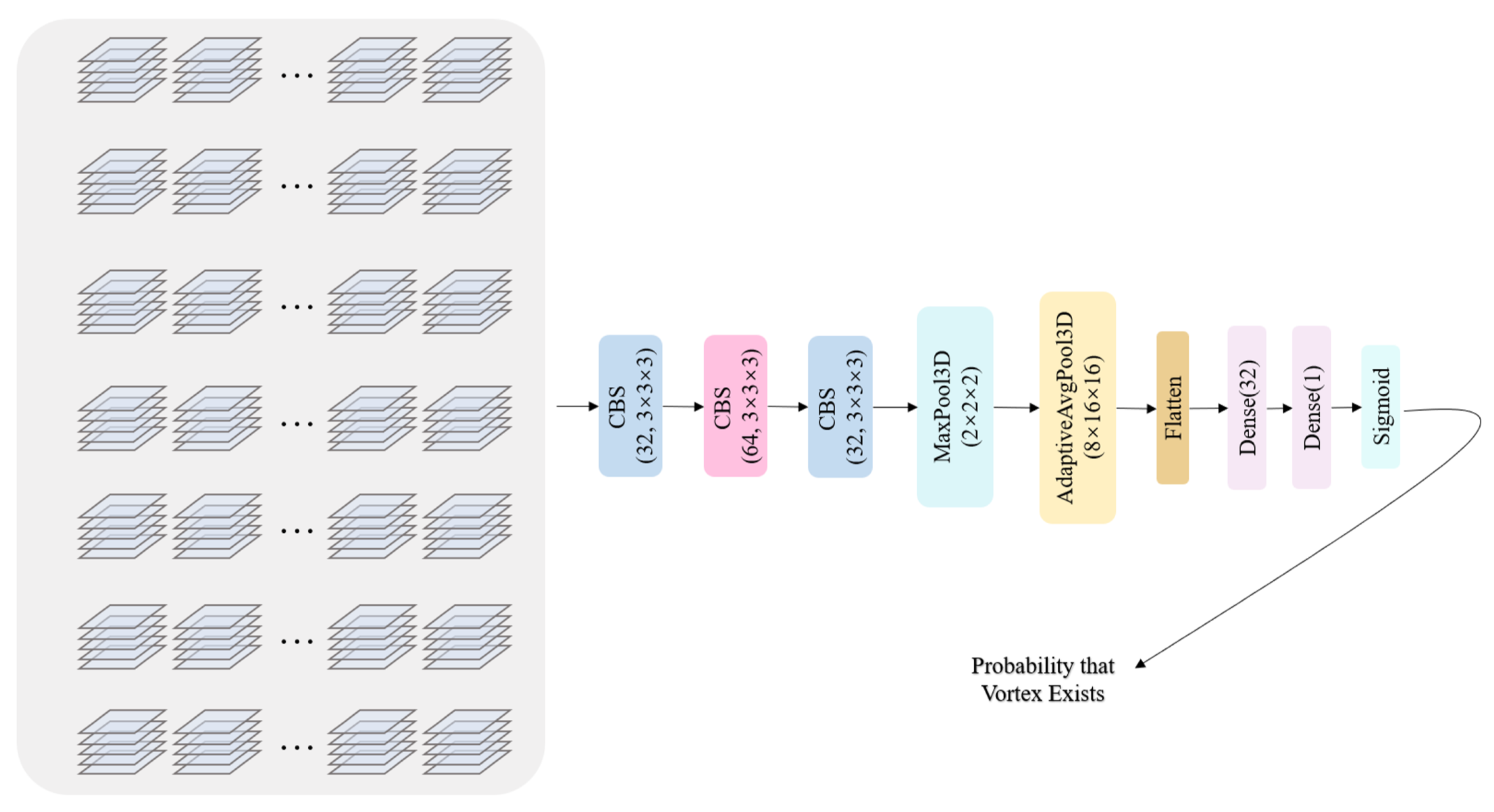
2.4. ATNet Network Architecture
2.5. Feature Permutation Importance Analysis Experiment Design
2.6. Object Detection Model
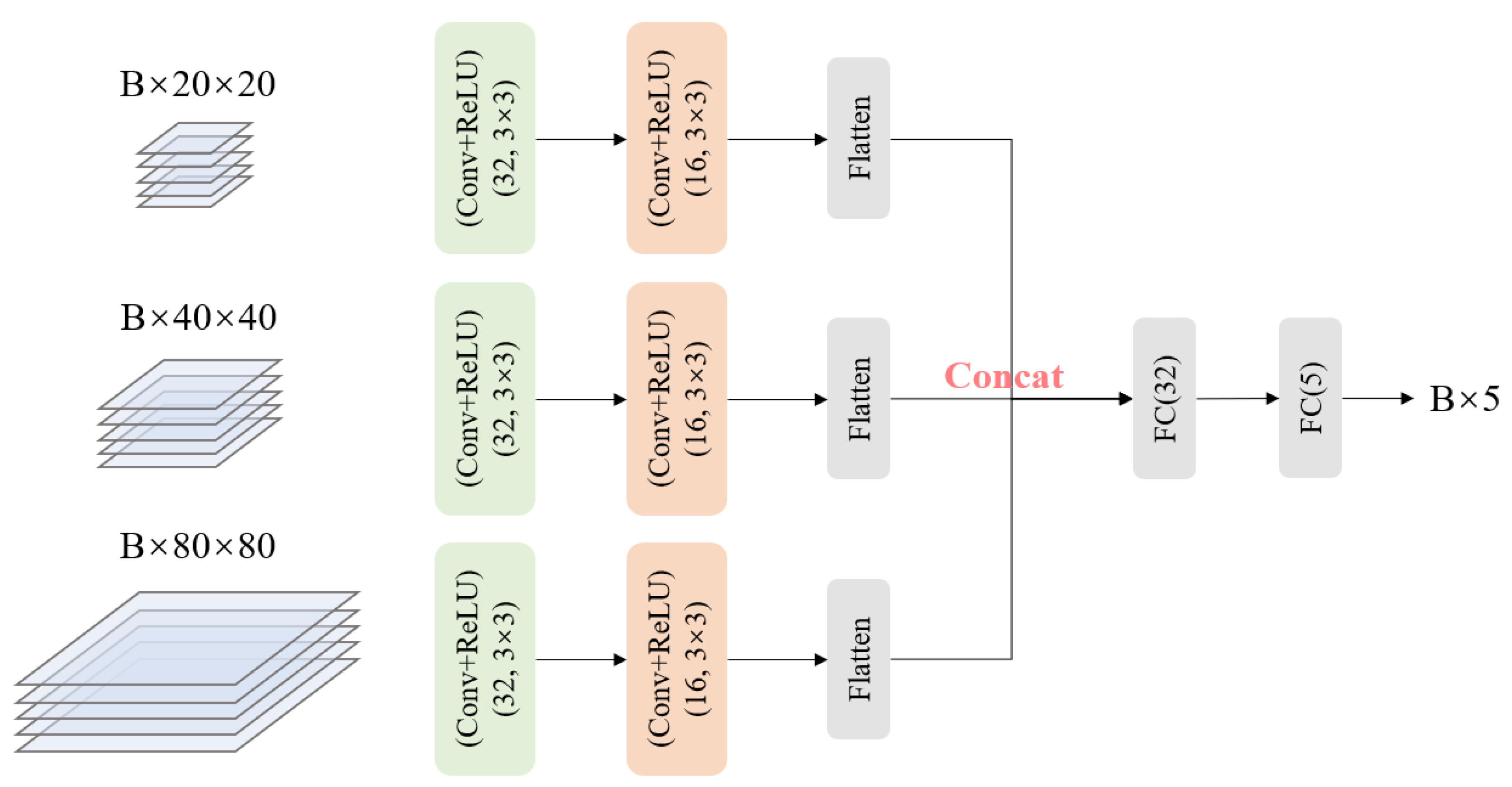
2.7. Auxiliary Task Network Design
2.8. Training and Optimization of Auxiliary Tasks
2.9. Auxiliary Task Experiment Design
3. Results
3.1. Feature Permutation Importance Analysis Results
- is the accuracy of the baseline model;
- is the final accuracy after a specific experiment.
3.2. Auxiliary Function Analysis Results
3.3. Actual Prediction Results
4. Discussion
4.1. Feature Permutation Importance Analysis Method
- Identification of High-Contribution Variables: The results show that geopotential, specific humidity, east-west wind speed, and north-south wind speed have a significant impact on model performance, exhibiting high importance. Specifically, geopotential and specific humidity reflect the key driving forces of atmospheric dynamics and humidity on Kármán vortex street formation, while east-west wind speed and north-south wind speed also demonstrate strong spatial flow characteristics. Therefore, these variables are classified as high-contribution variables and have an essential role in the model.
- Exclusion and Simplification of Low-Contribution Variables: In contrast, relative humidity had a minimal impact on model performance, with its feature importance value being only 0.0465, far lower than other variables. Therefore, relative humidity was deemed to contribute little to Kármán vortex street detection and was excluded after analysis. This conclusion aligns with the principle of model optimization, as removing low-contribution variables avoids interference from redundant features, reduces computational complexity, and enhances model training and prediction efficiency.
- Variable Merging and Optimization: In the analysis of the influence of multiple wind speed variables, east-west wind speed and north-south wind speed exhibited similar importance, with values of 0.0851 and 0.1014, respectively. Considering that these two variables provide similar physical information and their combination had nearly the same effect on model performance, they were merged into a single wind speed variable. This merging strategy not only simplified the model’s input features but also retained core information, reduced unnecessary redundancy, and improved computational efficiency.
- Optimized Variable Combination: Based on the above analysis, the five optimized variables selected are: geopotential, specific humidity, temperature, wind speed, and vertical velocity. This combination fully considers the importance and physical significance of each variable, while reducing the input feature dimension and maintaining detection accuracy, thus providing more precise and efficient feature input for subsequent auxiliary task experiments.
- Effectiveness of Model Optimization and Deep Learning Integration: Through feature importance analysis and variable optimization, this study not only successfully improved the model performance for Kármán vortex street detection but also effectively integrated physical parameters with deep learning techniques. By rationally selecting and merging variables, the study achieved improved model accuracy and robustness without increasing computational complexity. The optimized variable combination provides a more effective feature foundation for subsequent experiments and further demonstrates the effectiveness of combining physical knowledge with machine learning technologies.
4.2. Analysis of Optimal Variable Combinations
- Advantages of the Horizontal Wind Speed and Vertical Air Flow Combination: The combination of horizontal wind speed and vertical air flow demonstrates significant advantages. Horizontal wind speed captures shear flow and surface flow field characteristics in the target area, while vertical air flow provides complementary information on vertical movement disturbances in the troposphere. Together, they offer comprehensive three-dimensional fluid dynamics features, which are crucial for capturing target details. In terms of mAP50-95, this combination significantly outperforms others, showcasing its ability to enhance object detection accuracy in complex backgrounds, particularly in capturing fine-grained details.
- Comparison Analysis of Other Combinations: Although other dual-variable and three-variable combinations perform similarly in certain metrics, they fail to achieve optimal performance in both mAP50 and mAP50-95. For example, the combination of potential, precise humidity, and air temperature performs well in recall (0.835) but has lower precision and mAP50-95 values (0.402 and 0.402, respectively), failing to provide comprehensive high-precision detection performance. In contrast, the combination of horizontal wind speed and vertical air flow shows balanced performance across all metrics, making it especially suitable for high-precision object detection in practical applications.
- Four-Variable Combination Experimental Results: In the four-variable experiments, the combination excluding precise humidity demonstrates balanced and superior performance. This combination achieves a recall of 0.802, mAP50 of 0.828, and mAP50-95 of 0.387. Compared to other four-variable combinations, it stands out in high-precision detection tasks. The results suggest that while precise humidity contributes to the model, its redundancy is relatively high, and it can be partially replaced by other variables in a multi-variable optimization scenario to improve performance.
5. Conclusions
6. Prospects
- Variable Selection and Dynamic Weight Optimization: Experimental results show that different auxiliary variables significantly impact object detection performance, and some variables may exhibit redundancy in certain combinations. Future work could explore dynamic variable selection strategies, such as attention mechanisms or feature importance evaluation methods, to dynamically determine the contribution of key variables. Furthermore, adaptive weight optimization for auxiliary task losses can automatically adjust the importance of each task during training, thereby improving the model’s stability and convergence speed.
- Expanding Physical Parameters and Multi-Task Learning: In addition to the five variables currently used, future work could attempt to introduce more physical parameters, such as cloud characteristics, precipitation rate, or turbulence intensity, to provide richer contextual information for object detection. At the same time, a multi-task learning framework could be constructed, combining object detection with auxiliary variable prediction tasks. By sharing feature representations, the model performance could be enhanced. For instance, temperature gradients or flow field characteristics could serve as intermediate supervision signals to further optimize detection results.
- Cross-Domain and Temporal Dynamics Research: The existing results can be further extended to different domains, such as higher-resolution satellite data or ground-based observation scenarios, while also incorporating temporal dynamics (e.g., temporal variations of variables) to enhance the model’s adaptability to dynamic scenes. Verifying these methods across different geographical regions, atmospheric conditions, or time scales could increase their practical application value, especially in complex climate and weather monitoring.
- Data Augmentation and Simulation Validation: Using data augmentation and simulation techniques to generate scenes with diverse physical parameter distributions can provide the model with broader testing conditions. Meanwhile, by combining physical simulations with data-driven methods, the generated synthetic data can reduce reliance on labeled data, offering crucial support for performance validation in extreme or rare scenarios. This hybrid approach helps further enhance the robustness and application potential of detection systems.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chopra, K.P.; Hubert, L.F. Karman vortex-streets in Earth’s atmosphere. Nature 1964, 203, 1341–1343. [Google Scholar] [CrossRef]
- Wille, R. Karman vortex streets. Adv. Appl. Mech. 1960, 6, 273–287. [Google Scholar]
- Horváth, Á.; Koltai, J.; Lemaitre, M.; Janjic, T.; Bony, S. Evolution of an atmospheric Kármán vortex street from high-resolution satellite winds: Guadalupe Island case study. J. Geophys. Res. Atmos. 2020, 125, e2019JD032121. [Google Scholar] [CrossRef]
- Ito, J.; Niino, H. Atmospheric Kármán vortex shedding from Jeju island, East China Sea: A numerical study. Mon. Weather. Rev. 2016, 144, 139–148. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Pichel, W.G.; Clemente-Colón, P. A SAR observation and numerical study on ocean surface imprints of atmospheric vortex streets. Sensors 2008, 8, 3321–3334. [Google Scholar] [CrossRef] [PubMed]
- Thomson, R.E.; Gower, J.F.R.; Bowker, N.W. Vortex streets in the wake of the Aleutian Islands. Mon. Weather. Rev. 1977, 105, 873–884. [Google Scholar] [CrossRef]
- Abernathy, F.H.; Kronauer, R.E. The formation of vortex streets. J. Fluid Mech. 1962, 13, 1–20. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Reichstein, M.; Camps-Valls, G.; Stevens, B.; Jung, M.; Denzler, J.; Carvalhais, N.; Prabhat, F. Deep learning and process understanding for data-driven Earth system science. Nature 2019, 566, 195–204. [Google Scholar] [CrossRef]
- Kuma, P.; Labbouz, L.; Brandenburg, D.; Eyring, V.; Shaposhnikov, D.; Trepte, C.R. Machine learning of cloud types in satellite observations and climate models. Atmos. Chem. Phys. 2023, 23, 523–549. [Google Scholar] [CrossRef]
- Chapman, W.E.; Robertson, F.R.; Jacobson, T.S.; Dolwick, J.S. Improving atmospheric river forecasts with machine learning. Geophys. Res. Lett. 2019, 46, 10627–10635. [Google Scholar] [CrossRef]
- King, M.D.; Tsay, S.C.; Platnick, S.; Wang, M.; Liou, K.N. Remote sensing of liquid water and ice cloud optical thickness and effective radius in the Arctic: Application of airborne multispectral MAS data. J. Atmos. Ocean. Technol. 2004, 21, 857–875. [Google Scholar] [CrossRef]
- King, M.D.; Kaufman, Y.J.; Menzel, W.P.; Tanré, D. Cloud and aerosol properties, precipitable water, and profiles of temperature and water vapor from MODIS. IEEE Trans. Geosci. Remote. Sens. 2003, 41, 442–458. [Google Scholar] [CrossRef]
- Platnick, S.; King, M.D.; Meyer, K.G.; Tanré, D.; Gleason, J.J.; Hutchison, K. The MODIS cloud products: Algorithms and examples from Terra. IEEE Trans. Geosci. Remote. Sens. 2003, 41, 459–473. [Google Scholar] [CrossRef]
- Ham, Y.G.; Kim, J.H.; Luo, J.J. Deep learning for multi-year ENSO forecasts. Nature 2019, 573, 568–572. [Google Scholar] [CrossRef]
- Nunalee, C.G. A Dynamical Characterization of Atmospheric von Kármán Vortex Streets Induced by Bluff Topography. Ph.D. Thesis, North Carolina State University, Raleigh, NC, USA, 2015. [Google Scholar]
- Nunalee, C.G.; Basu, S. On the periodicity of atmospheric von Kármán vortex streets. Environ. Fluid Mech. 2014, 14, 1335–1355. [Google Scholar] [CrossRef]
- Stegner, A.; Pichon, T.; Beunier, M. Elliptical-inertial instability of rotating Karman vortex streets. Phys. Fluids 2005, 17, 066601. [Google Scholar] [CrossRef]
- Beggs, P.J.; Selkirk, P.M.; Kingdom, D.L. Identification of Von Kármán vortices in the surface winds of Heard Island. Bound.-Layer Meteorol. 2004, 113, 287–297. [Google Scholar] [CrossRef]
- Heinze, R.; Raasch, S.; Etling, D. The structure of Kármán vortex streets in the atmospheric boundary layer derived from large eddy simulation. Meteorol. Z. 2012, 21, 1–14. [Google Scholar] [CrossRef]
- Nardecchia, F.; Mattoni, B.; Burattini, C.; Bisegna, F. The impact of humidity on vortex creation around isolated buildings. Build. Res. Inf. 2020, 48, 551–571. [Google Scholar] [CrossRef]
- Chen, J.G.; Zhou, Y.; Antonia, R.A.; Zhou, T.M. The turbulent Kármán vortex. J. Fluid Mech. 2019, 871, 92–112. [Google Scholar] [CrossRef]
- Jocher, G.; Qiu, J.; Ultralytics Team. YOLOv8: A New Approach to Real-Time Object Detection. Ultralytics. 2023. Available online: https://github.com/ultralytics/yolov8 (accessed on 2 February 2025).
- Jocher, G.; Qiu, J. Ultralytics YOLO11. Ultralytics. 2024. Available online: https://github.com/ultralytics/ultralytics (accessed on 2 February 2025).
- NASA. MOD021KM: MODIS/Terra Level 1B Calibrated Radiances, Version 6. Distributed by NASA’s LAADS DAAC. 2024. Available online: https://ladsweb.modaps.eosdis.nasa.gov/ (accessed on 21 January 2025).
- NASA. MODIS (Moderate Resolution Imaging Spectroradiometer): Specifications. Available online: https://modis.gsfc.nasa.gov/about/specifications.php (accessed on 3 February 2025).
- Tzutalin. Tzutalin/Labelimg: LabelImg Is a Graphical Image Annotation Tool and Label Object Bounding Boxes in Images. GitHub Repository 2015. Available online: https://github.com/tzutalin/labelImg (accessed on 2 February 2025).
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 Global Reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Riley, J.J.; Lelong, M.-P. Fluid motions in the presence of strong stable stratification. Annu. Rev. Fluid Mech. 2000, 32, 613–657. [Google Scholar] [CrossRef]
- Tritton, D.J. Physical Fluid Dynamics; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Etling, D. On atmospheric vortex streets in the wake of large islands. Meteorol. Atmos. Phys. 1989, 41, 157–164. [Google Scholar] [CrossRef]
- Chung, Y.S.; Kim, H.S. Mountain-generated vortex streets over the Korea South Sea. Int. J. Remote. Sens. 2008, 29, 867–877. [Google Scholar] [CrossRef]
- Etling, D. An unusual atmospheric vortex street. Environ. Fluid Mech. 2019, 19, 1379–1391. [Google Scholar] [CrossRef]
- Liu, Q.; Wu, Z.; Tan, Z.-M.; Yang, F.; Fu, C. The Atmospheric Vortex Streets and Their Impact on Precipitation in the Wake of the Tibetan Plateau. Atmosphere 2023, 14, 1096. [Google Scholar] [CrossRef]
- Altmann, A.; Toloşi, L.; Sander, O.; Lengauer, T. Permutation importance: A corrected feature importance measure. Bioinformatics 2010, 26, 1340–1347. [Google Scholar] [CrossRef]
- Fisher, A.; Rudin, C.; Dominici, F. All models are wrong, but many are useful: Learning a variable’s importance by studying an entire class of prediction models simultaneously. J. Mach. Learn. Res. 2019, 20, 1–81. [Google Scholar]
- Ultralytics. Yolov8 anchor-free bounding box prediction—Issue 189. GitHub 2023. Available online: https://github.com/ultralytics/ultralytics/issues/189 (accessed on 2 February 2025).
- Holton, J.R.; Hakim, G.J. An Introduction to Dynamic Meteorology; Academic Press: Cambridge, CA, USA, 2013; Volume 88. [Google Scholar]
- Pedlosky, J. Geophysical Fluid Dynamics; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Wallace, J.M.; Hobbs, P.V. Atmospheric Science: An Introductory Survey; Elsevier: London, UK, 2006; Volume 92. [Google Scholar]
- Emanuel, K.A. Atmospheric Convection; Oxford University Press: London, UK, 1994. [Google Scholar]
- Batchelor, G.K. An Introduction to Fluid Dynamics; Cambridge University Press: London, UK, 2000. [Google Scholar]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer Science & Business Media: Berlin, Germany, 2012; Volume 13. [Google Scholar]
- Banta, R.M.; Schaaf, C.B.; Hardesty, R.M. Mountain waves and downslope winds. In Atmospheric Processes over Complex Terrain; Springer: Berlin, Germany, 1990; pp. 59–81. [Google Scholar]
- Smith, R.B. The influence of mountains on the atmosphere. In Advances in Geophysics; Elsevier: London, UK, 1979; Volume 21, pp. 87–230. [Google Scholar]
- Yau, M.K.; Rogers, R.R. A Short Course in Cloud Physics; Elsevier: London, UK, 1996. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Island | Location | Region | Notable Features |
|---|---|---|---|
| Jeju Island | 33.50° N, 126.53° E | Republic of Korea | Volcanic island and strong winds. |
| Canary Islands | 28.12° N, 15.43° W | Atlantic Ocean (Spain) | Subtropical climate, trade winds influence. |
| Cape Verde | 15.12° N, 23.61° W | Atlantic Ocean (West Africa) | Arid climate, Sahara dust influence. |
| Guadalupe Island | 29.03° N, 118.27° W | Pacific Ocean (Mexico) | Arid climate, located in upwelling zones. |
| Variable Name | Perm Decrease (Accuracy Drop) |
|---|---|
| Geopotential | 0.1029 |
| Specific Humidity | 0.1015 |
| Northward Wind | 0.1014 |
| Eastward Wind | 0.0851 |
| Temperature | 0.0753 |
| Vertical Velocity | 0.0753 |
| Relative Humidity | 0.0465 |
| Experiment Name | Precision | Recall | mAP50 | mAP50-95 |
|---|---|---|---|---|
| No Auxiliary Variables | 0.745 | 0.745 | 0.759 | 0.372 |
| Geopotential | 0.764 (+1.9%) | 0.738 (−0.7%) | 0.812 (+5.3%) | 0.371 (−0.1%) |
| Specific Humidity | 0.763 (+1.8%) | 0.810 (+6.5%) | 0.818 (+5.9%) | 0.364 (−0.8%) |
| Temperature | 0.764 (+1.9%) | 0.738 (−0.7%) | 0.812 (+5.3%) | 0.361 (−1.1%) |
| Horizontal Wind Speed | 0.755 (+1.0%) | 0.748 (+0.3%) | 0.802 (+4.3%) | 0.359 (−1.3%) |
| Vertical Velocity | 0.725 (−2.0%) | 0.785 (+4.0%) | 0.795 (+3.6%) | 0.382 (+1.0%) |
| Geopotential + Specific Humidity | 0.762 (+1.7%) | 0.771 (+2.6%) | 0.806 (+4.7%) | 0.358 (−1.4%) |
| Geopotential + Temperature | 0.711 (−3.4%) | 0.873 (+12.8%) | 0.833 (+7.4%) | 0.365 (−0.7%) |
| Geopotential + Horizontal Wind Speed | 0.790 (+4.5%) | 0.808 (+6.3%) | 0.835 (+7.6%) | 0.404 (+3.2%) |
| Geopotential + Vertical Velocity | 0.803 (+5.8%) | 0.772 (+2.7%) | 0.839 (+8.0%) | 0.360 (−1.2%) |
| Specific Humidity + Temperature | 0.721 (−2.4%) | 0.835 (+9.0%) | 0.857 (+9.8%) | 0.388 (+1.6%) |
| Specific Humidity + Horizontal Wind Speed | 0.744 (−0.1%) | 0.810 (+6.5%) | 0.831 (+7.2%) | 0.377 (+0.5%) |
| Specific Humidity + Vertical Velocity | 0.688 (−5.7%) | 0.797 (+5.2%) | 0.763 (+0.4%) | 0.332 (−4.0%) |
| Temperature + Horizontal Wind Speed | 0.744 (−0.1%) | 0.810 (+6.5%) | 0.831 (+7.2%) | 0.377 (+0.5%) |
| Temperature + Vertical Velocity | 0.756 (+1.1%) | 0.745 (+0.0%) | 0.749 (−1.0%) | 0.346 (−2.6%) |
| Horizontal Wind Speed + Vertical Velocity | 0.838 (+9.3%) | 0.797 (+5.2%) | 0.865 (+10.6%) | 0.413 (+4.1%) |
| Geopotential + Specific Humidity + Temperature | 0.755 (+1.0%) | 0.835 (+9.0%) | 0.876 (+11.7%) | 0.402 (+3.0%) |
| Geopotential + Specific Humidity + Horizontal Wind Speed | 0.744 (−0.1%) | 0.810 (+6.5%) | 0.831 (+7.2%) | 0.377 (+0.5%) |
| Geopotential + Specific Humidity + Vertical Velocity | 0.755 (+1.0%) | 0.803 (+5.8%) | 0.811 (+5.2%) | 0.378 (+0.6%) |
| Geopotential + Temperature + Horizontal Wind Speed | 0.729 (−1.6%) | 0.771 (+2.6%) | 0.770 (+1.1%) | 0.368 (−0.4%) |
| Geopotential + Temperature + Vertical Velocity | 0.854 (+10.9%) | 0.772 (+2.7%) | 0.851 (+9.2%) | 0.351 (−2.1%) |
| Geopotential + Horizontal Wind Speed + Vertical Velocity | 0.748 (+0.3%) | 0.801 (+5.6%) | 0.832 (+7.3%) | 0.373 (+0.1%) |
| Specific Humidity + Temperature + Horizontal Wind Speed | 0.826 (+8.1%) | 0.721 (−2.4%) | 0.768 (+0.9%) | 0.373 (+0.1%) |
| Specific Humidity + Temperature + Vertical Velocity | 0.787 (+4.2%) | 0.734 (−1.1%) | 0.799 (+4.0%) | 0.367 (−0.5%) |
| Specific Humidity + Horizontal Wind Speed + Vertical Velocity | 0.759 (+1.4%) | 0.709 (−3.6%) | 0.790 (+3.1%) | 0.358 (−1.4%) |
| Temperature + Horizontal Wind Speed + Vertical Velocity | 0.804 (+5.9%) | 0.759 (+1.4%) | 0.843 (+8.4%) | 0.376 (+0.4%) |
| Excluding Geopotential | 0.797 (+5.2%) | 0.747 (+0.2%) | 0.810 (+5.1%) | 0.358 (−1.4%) |
| Excluding Specific Humidity | 0.725 (−2.0%) | 0.802 (+5.7%) | 0.828 (+6.9%) | 0.387 (+1.5%) |
| Excluding Temperature | 0.758 (+1.3%) | 0.754 (+0.9%) | 0.821 (+6.2%) | 0.379 (+0.7%) |
| Excluding Horizontal Wind Speed | 0.744 (−0.1%) | 0.810 (+6.5%) | 0.831 (+7.2%) | 0.377 (+0.5%) |
| Excluding Vertical Velocity | 0.826 (+8.1%) | 0.727 (−1.8%) | 0.795 (+3.6%) | 0.370 (−0.2%) |
| All Variables | 0.833 (+8.8%) | 0.823 (+7.8%) | 0.828 (+6.9%) | 0.372 (+0.0%) |
| Algorithms | Params (M) | Precision | Recall | mAP50 | mAP50-95 |
|---|---|---|---|---|---|
| YOLOv8s | 11.2 | 0.745 | 0.745 | 0.759 | 0.372 |
| YOLOv8m | 25.9 | 0.791 | 0.711 | 0.781 | 0.357 |
| YOLOv9t | 2.0 | 0.725 | 0.749 | 0.771 | 0.345 |
| YOLOv9m | 20.1 | 0.711 | 0.753 | 0.740 | 0.341 |
| YOLOv9c | 25.5 | 0.724 | 0.770 | 0.769 | 0.354 |
| YOLOv10s | 7.2 | 0.733 | 0.670 | 0.737 | 0.342 |
| YOLOv10m | 15.4 | 0.739 | 0.692 | 0.742 | 0.351 |
| YOLOv11n | 2.6 | 0.716 | 0.725 | 0.762 | 0.343 |
| YOLOv11s | 9.4 | 0.700 | 0.732 | 0.759 | 0.349 |
| YOLOv11m | 20.1 | 0.731 | 0.794 | 0.794 | 0.361 |
| RT-DETR Large | 42.3 | 0.809 | 0.829 | 0.840 | 0.405 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhang, Z.; Su, Q.; Wu, C.; Zhang, Y.; Chen, D. Enhancing Kármán Vortex Street Detection via Auxiliary Networks Incorporating Key Atmospheric Parameters. Atmosphere 2025, 16, 338. https://doi.org/10.3390/atmos16030338
Zhang Y, Zhang Z, Su Q, Wu C, Zhang Y, Chen D. Enhancing Kármán Vortex Street Detection via Auxiliary Networks Incorporating Key Atmospheric Parameters. Atmosphere. 2025; 16(3):338. https://doi.org/10.3390/atmos16030338
Chicago/Turabian StyleZhang, Yihan, Zhi Zhang, Qiao Su, Chaoyue Wu, Yuqi Zhang, and Daoyi Chen. 2025. "Enhancing Kármán Vortex Street Detection via Auxiliary Networks Incorporating Key Atmospheric Parameters" Atmosphere 16, no. 3: 338. https://doi.org/10.3390/atmos16030338
APA StyleZhang, Y., Zhang, Z., Su, Q., Wu, C., Zhang, Y., & Chen, D. (2025). Enhancing Kármán Vortex Street Detection via Auxiliary Networks Incorporating Key Atmospheric Parameters. Atmosphere, 16(3), 338. https://doi.org/10.3390/atmos16030338