
Flight Experiments and Numerical Simulations for Investigating Multicopter Flow Field and Structure Deformation

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Quadcopter System
2.2. Flight Test Equipment
2.2.1. On-Board Instrumentation
Data Acquisition
Rotor Speed of Rotation and Phase Sensing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight | Date | Flight | Pressure | Temp. | 3-Axis | Strain | BOS | Weight | Data | Rotor Speed | Temp. | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No. | in 2021 | Time | #1 | #2 | 2× | Accel. | Gauges | Rate | Meas. Location | Housing | |||
| [mm:ss] | [] | [] | [] | Outer | Inner | Vert. | [kg] | [kHz] | |||||
| 1 | 2 March | 04:32 | 90.0 | 85.0 | 87.5 | ✓ | – | – | – | 21.8 | 51.2 | Rotor | yes |
| 2 | 2 March | 11:25 | 87.5 | 82.5 | 87.5 | – | X | – | X | 21.8 | 51.2 | Rotor | no |
| 3 | 12 March | 06:25 | 90.0 | 85.0 | 87.5 | ✓ | – | – | – | 24.9 | 51.2 | Rotor | yes |
| 4 | 22 March | 08:37 | 87.5 | 82.5 | X | – | X | – | – | 24.9 | 51.2 | ✓ | yes |
| 5 | 22 March | 04:56 | 92.5 | 87.5 | X | – | X | – | – | 24.9 | 51.2 | ✓ | no |
| 6 | 22 March | 05:14 | 87.5 | 82.5 | X | – | X | – | – | 24.9 | 204.8 | ✓ | no |
| 7 | 23 March | 07:58 | – | 87.5 | – | ✓ | X | – | X | 24.9 | 51.2 | ✓ | |
| 8 | 23 March | 02:52 | 90.0 | 85.0 | X | ✓ | – | – | – | 24.9 | 51.2 | Motor | no |
| 9 | 23 March | 05:42 | 85.0 | 80.0 | X | ✓ | – | – | – | 24.9 | 51.2 | Motor | no |
| 10 | 23 March | 01:14 | 95.0 | 90.0 | X | ✓ | – | – | – | 24.9 | 51.2 | Motor | no |
| 11 | 23 March | 00:52 | 92.5 | 87.5 | X | ✓ | – | – | – | 24.9 | 51.2 | Motor | no |
| 12 | 23 March | 00:55 | 87.5 | 82.5 | X | ✓ | – | – | – | 24.9 | 51.2 | Motor | no |
| 13 | 23 March | 08:16 | – | 85.0 | – | ✓ | X | – | ✓ | 24.9 | 51.2 | ✓ | - |
| 14 | 23 March | 06:45 | – | 90.0 | – | ✓ | X | – | ✓ | 24.9 | 51.2 | ✓ | - |
| 15 | 30 March | 05:49 | – | – | – | ✓ | ✓ | ✓ | – | 24.9 | 51.2 | Motor | - |
| 16 | 30 March | 05:20 | – | – | – | ✓ | ✓ | X | – | 24.9 | 51.2 | ✓ | - |
Pressure Sensors
Temperature Sensors
Accelerometers
Strain Gauges for Rotor Force Measurements
2.2.2. External Measurement Systems
2.3. Laboratory and Ground Tests
2.3.1. Laboratory Tests of On-Board Measurement Equipment
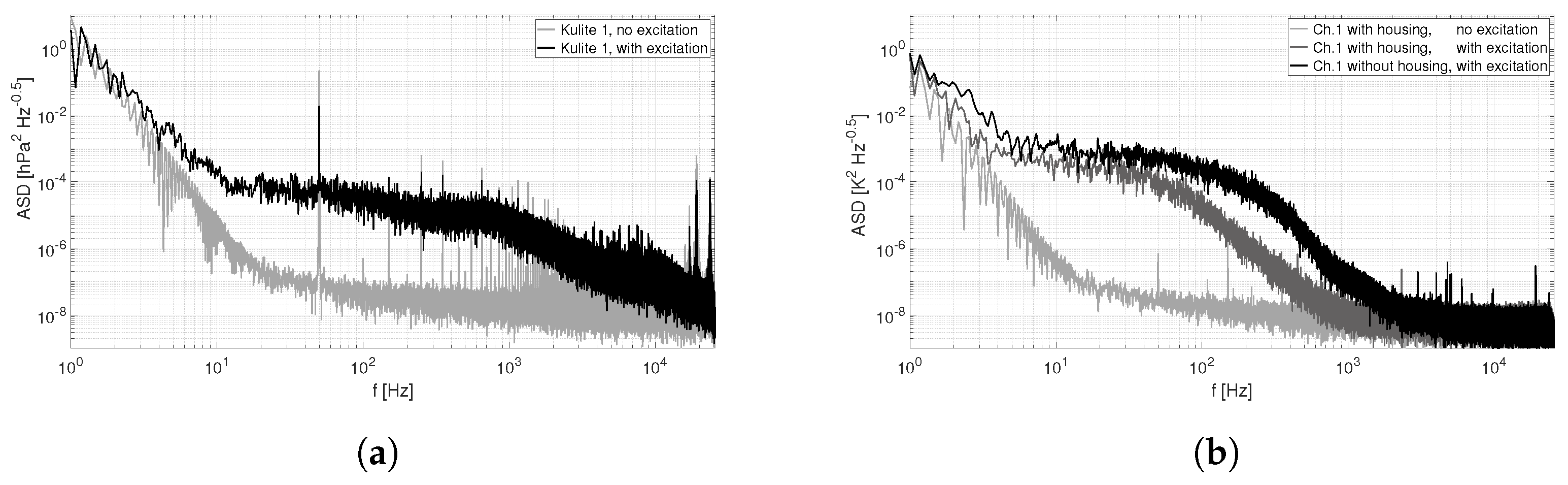
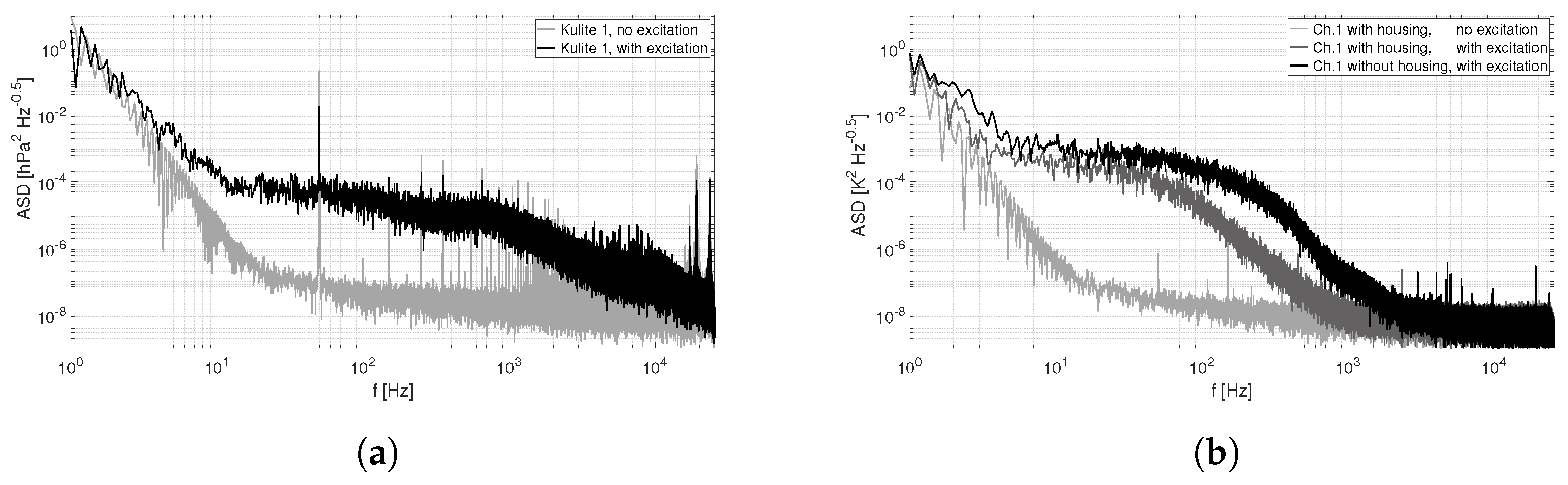
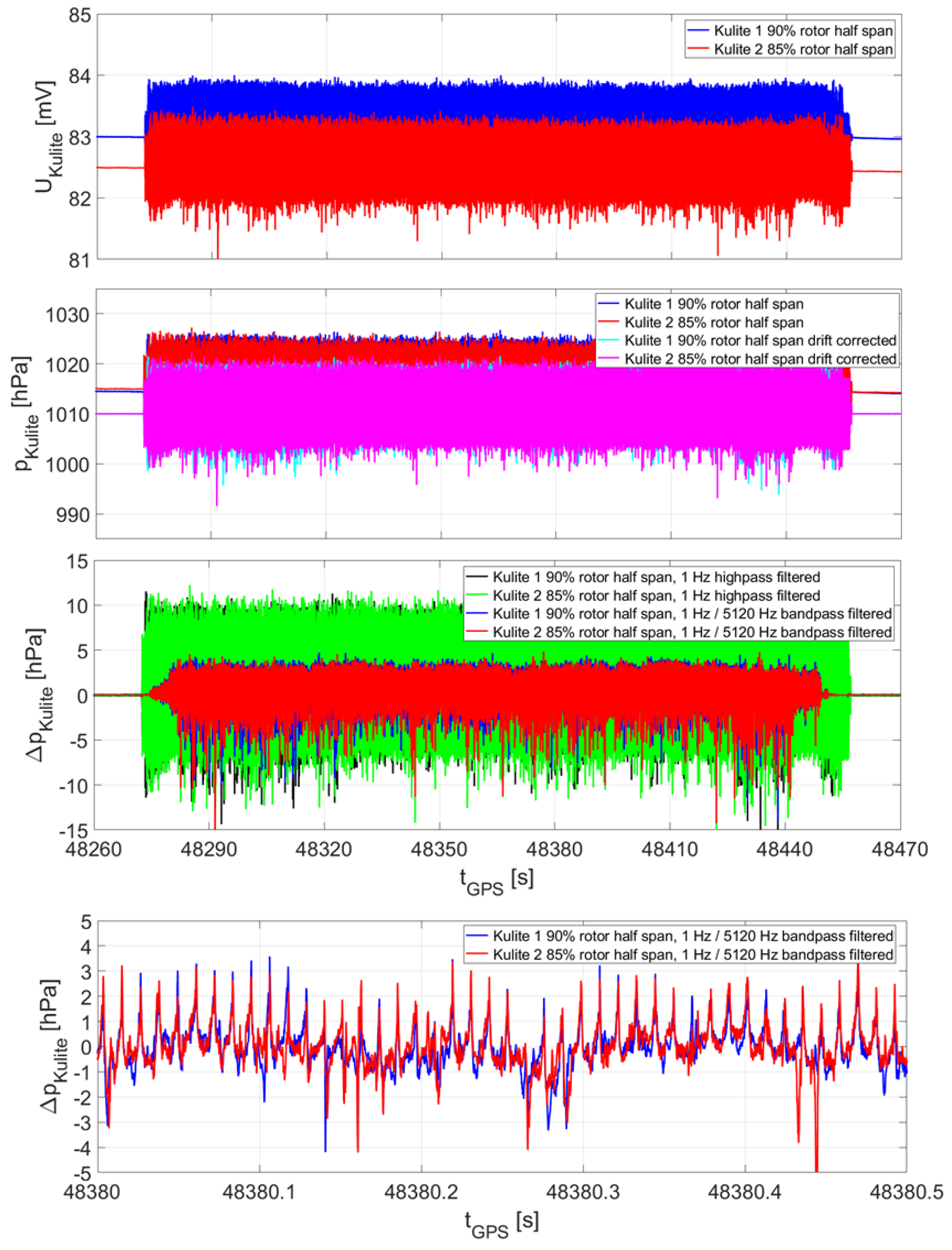
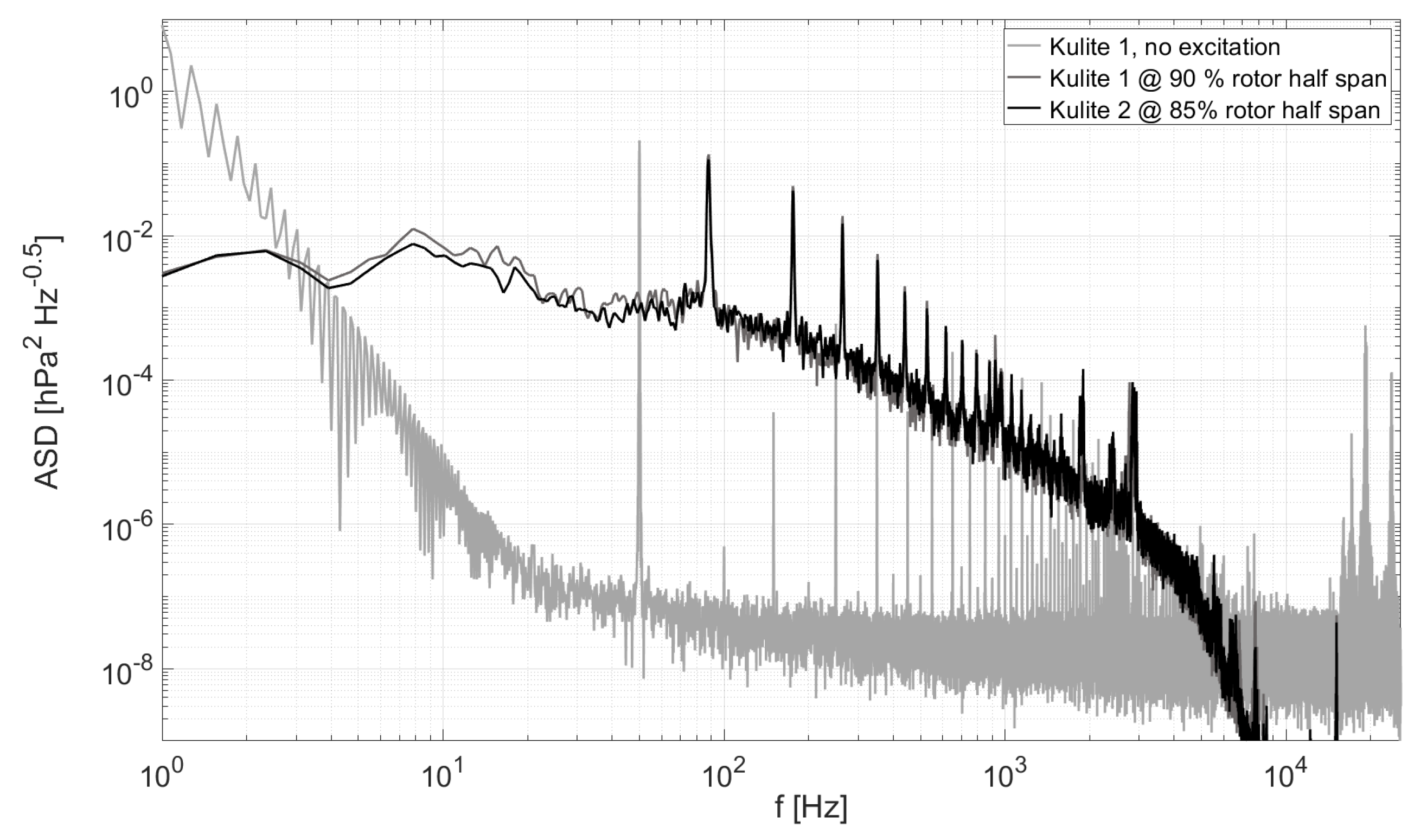
Spectra of Kulite Pressure Sensors
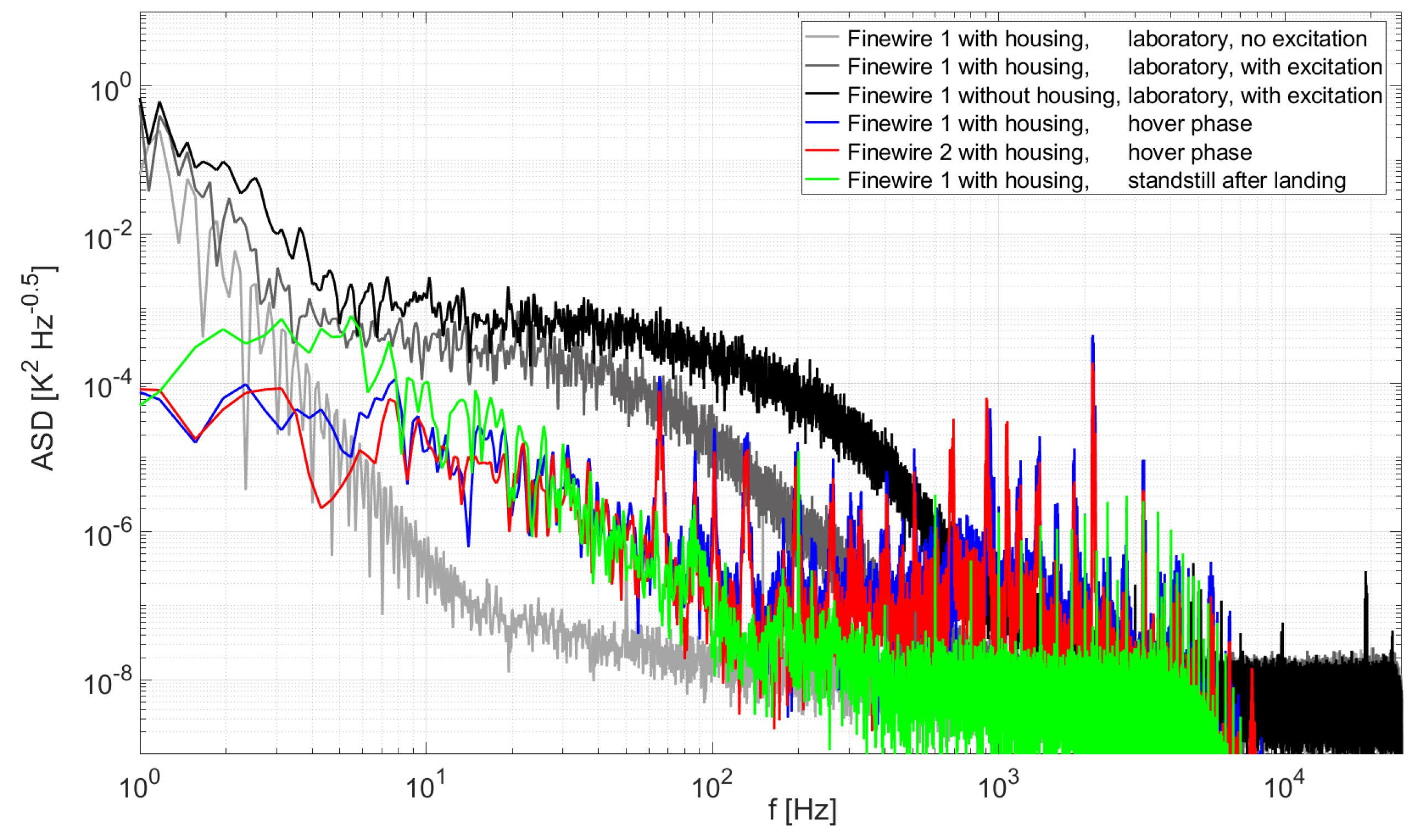
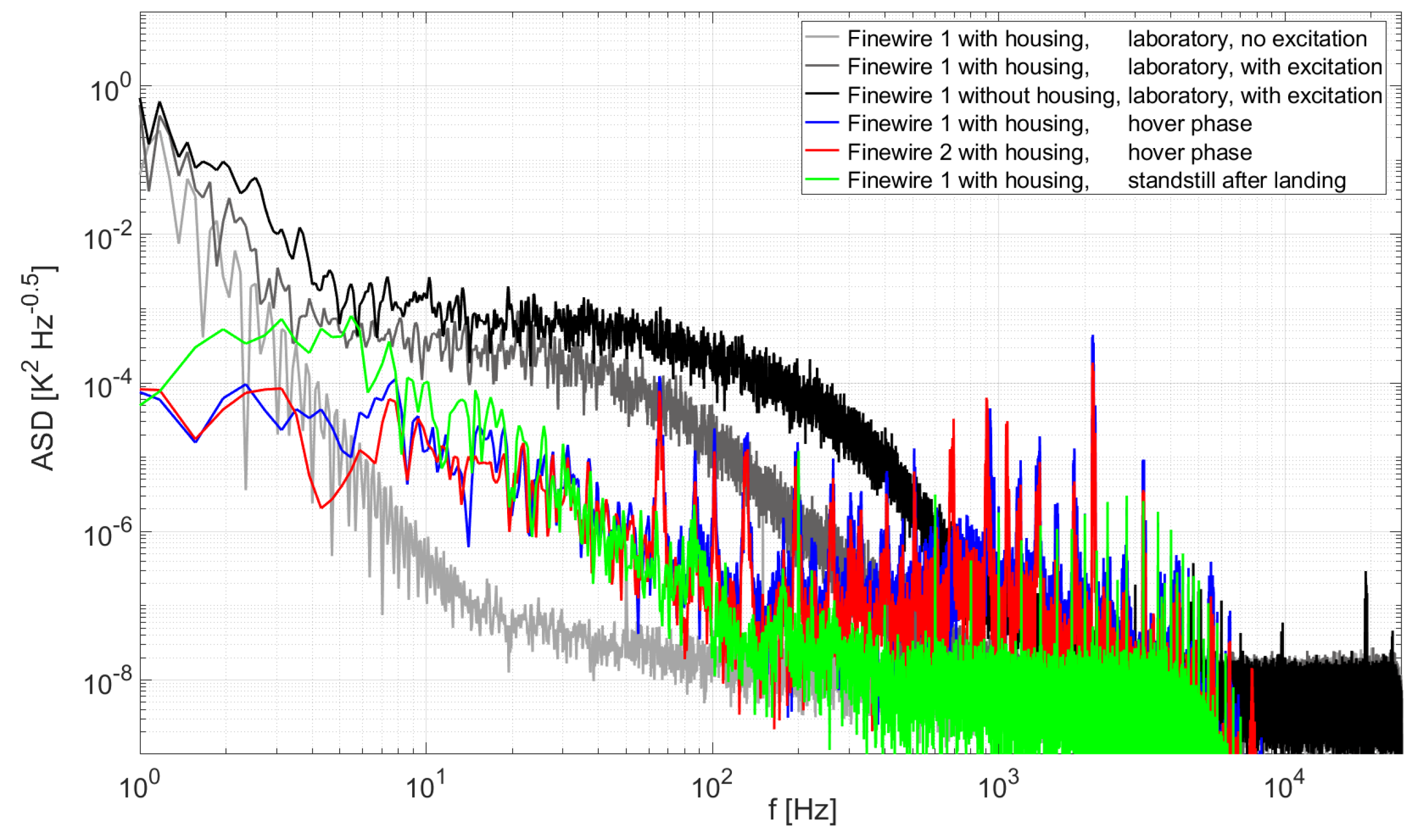
Spectra of Finewire Temperature Sensors
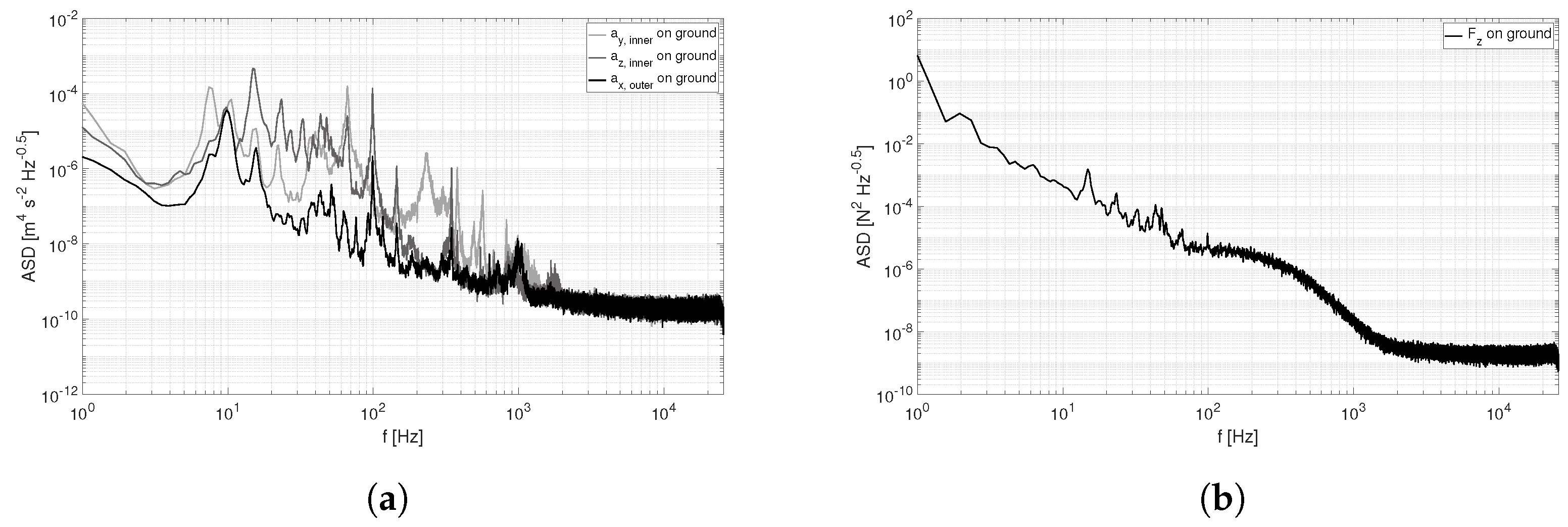
Spectra of Accelerometers and Force Measurements
2.3.2. Laboratory Setup for Hover Tests with Isolated Rotor
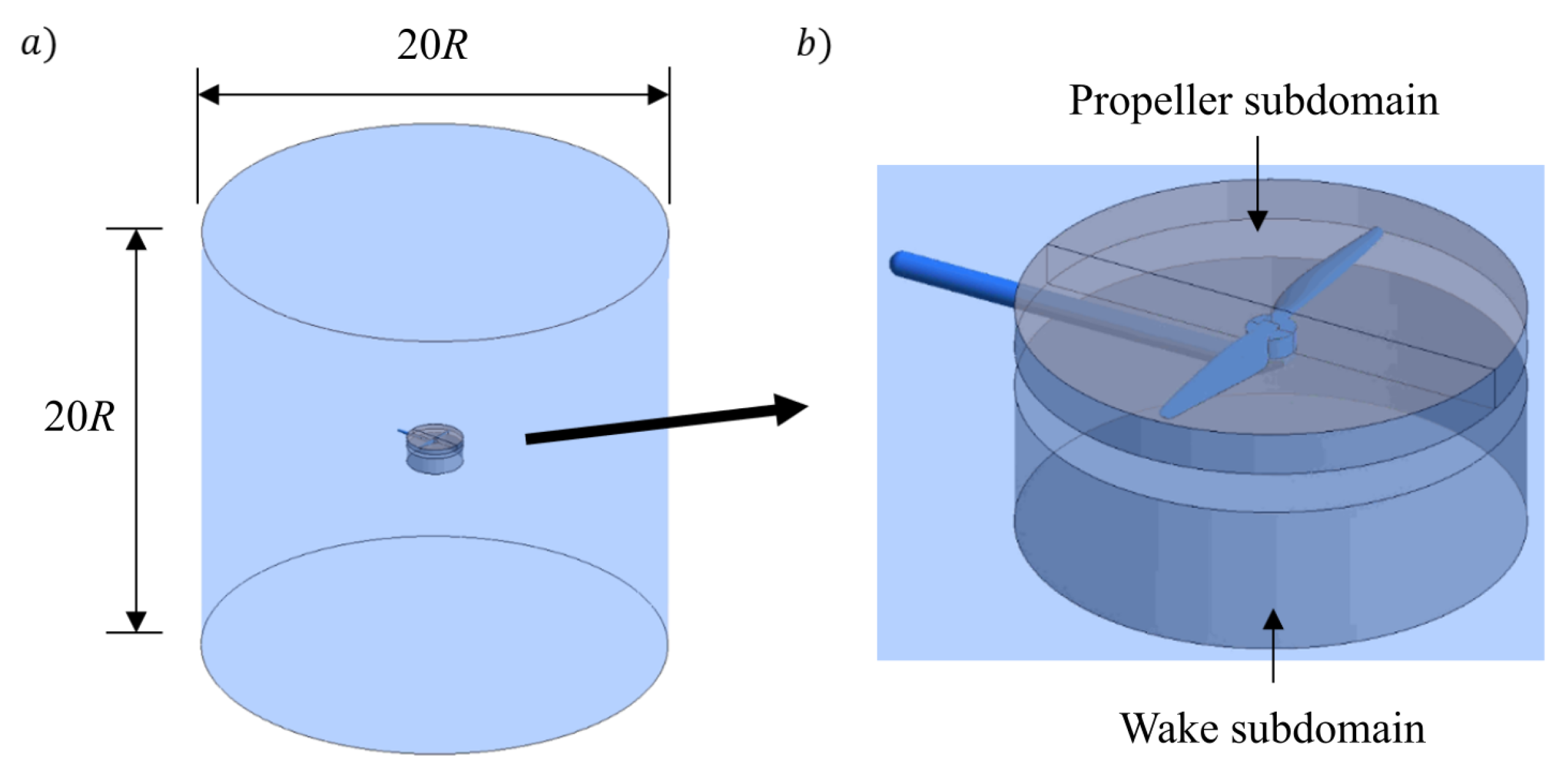
2.4. Numerical Setup for Simulations of Isolated Rotor
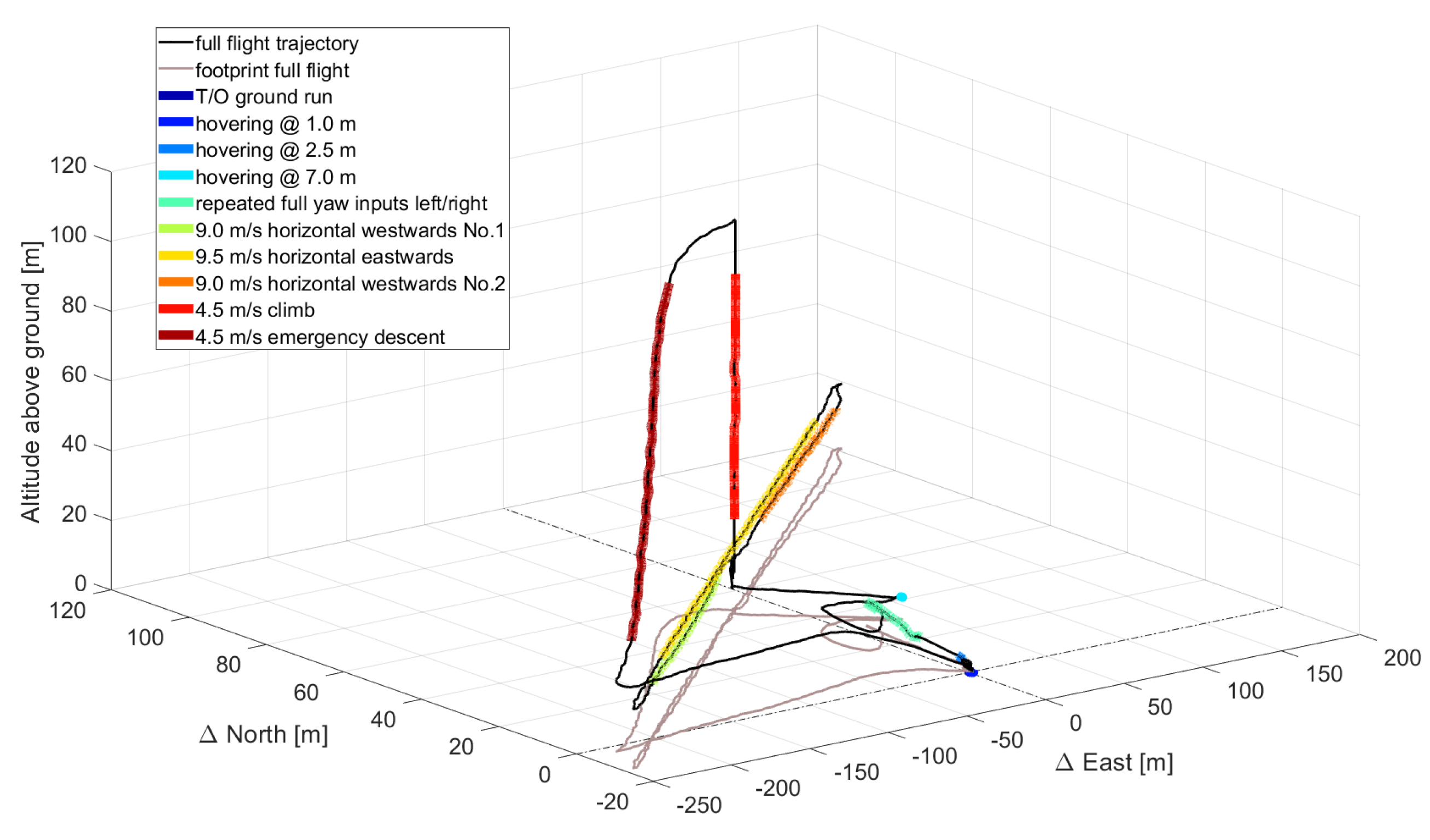
2.5. Flight Test Overview
3. Results and Discussion
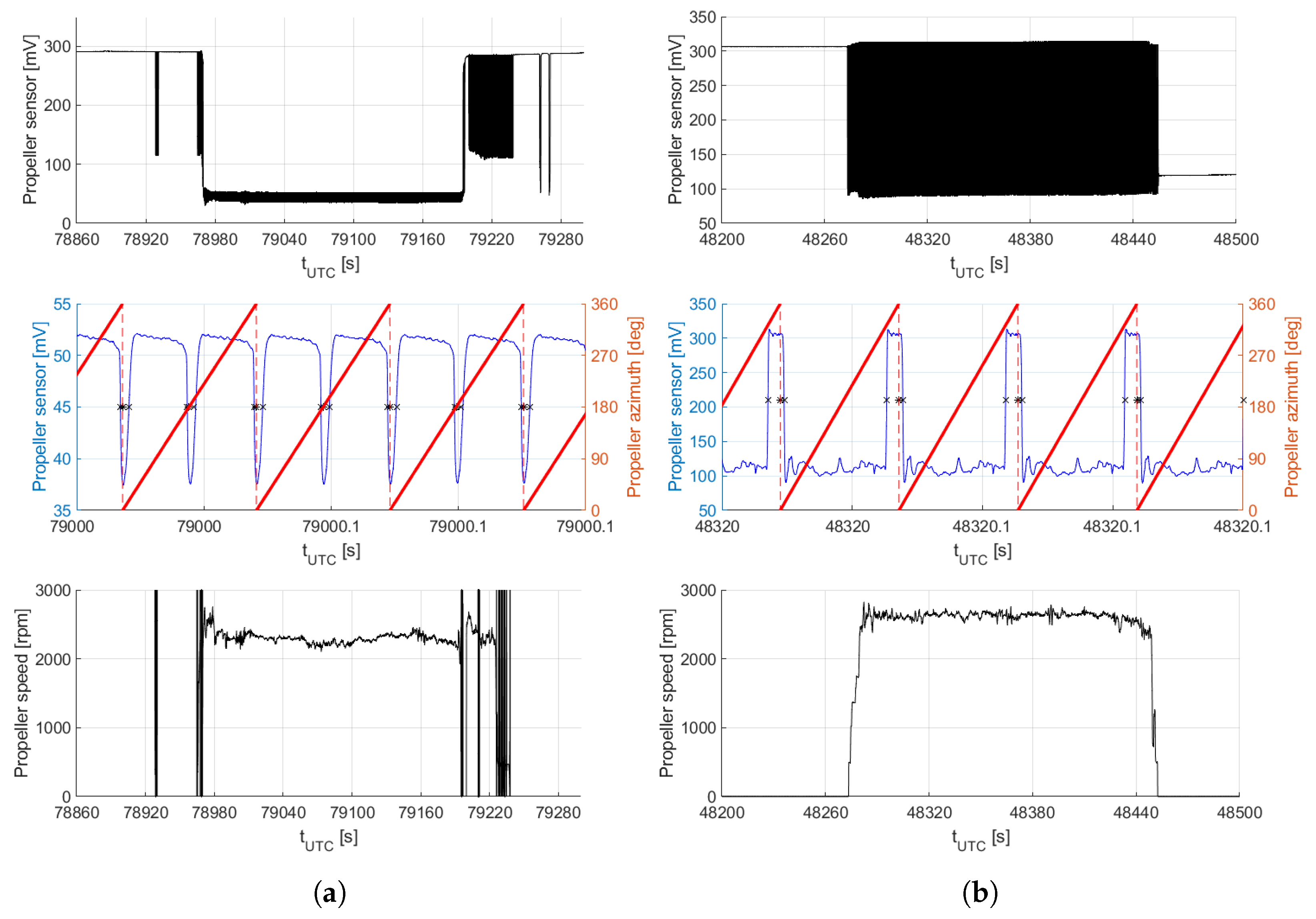
3.1. Measurement of Rotor Speed and Phase
3.2. Aerodynamic Results
3.2.1. Pressure Fluctuations Induced by Rotors
3.2.2. Temperature Fluctuations Induced by the Rotor
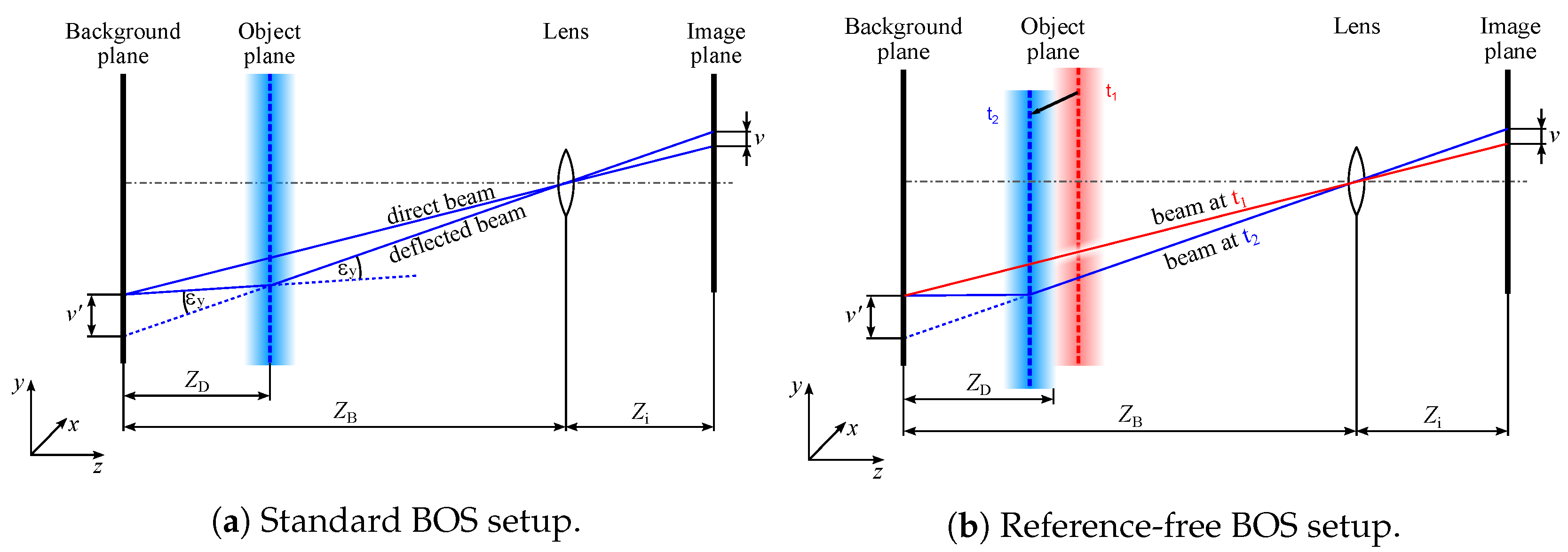
3.2.3. Vortex Visualisation with BOS
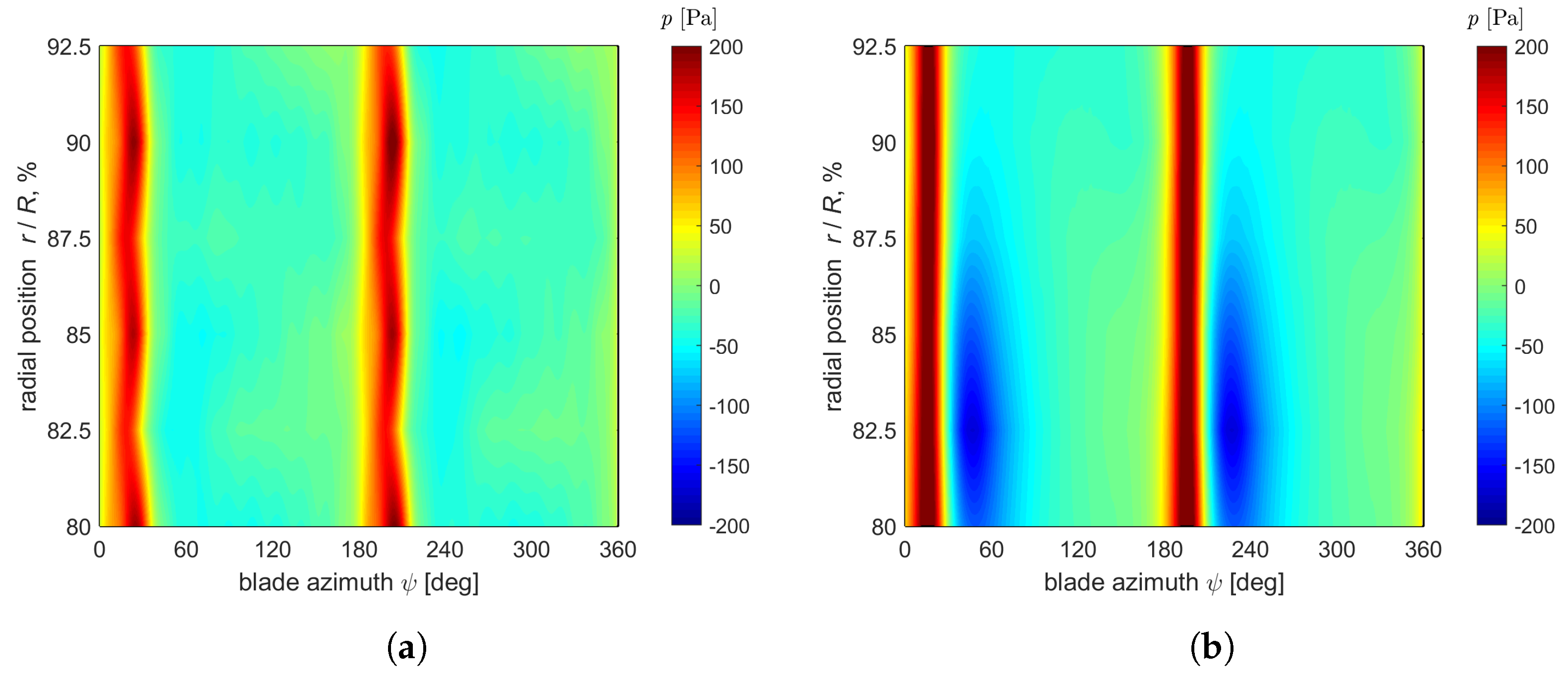
3.2.4. Discussion of Comparison of CFD and Flight Test Data
3.3. Structure Deformation Results
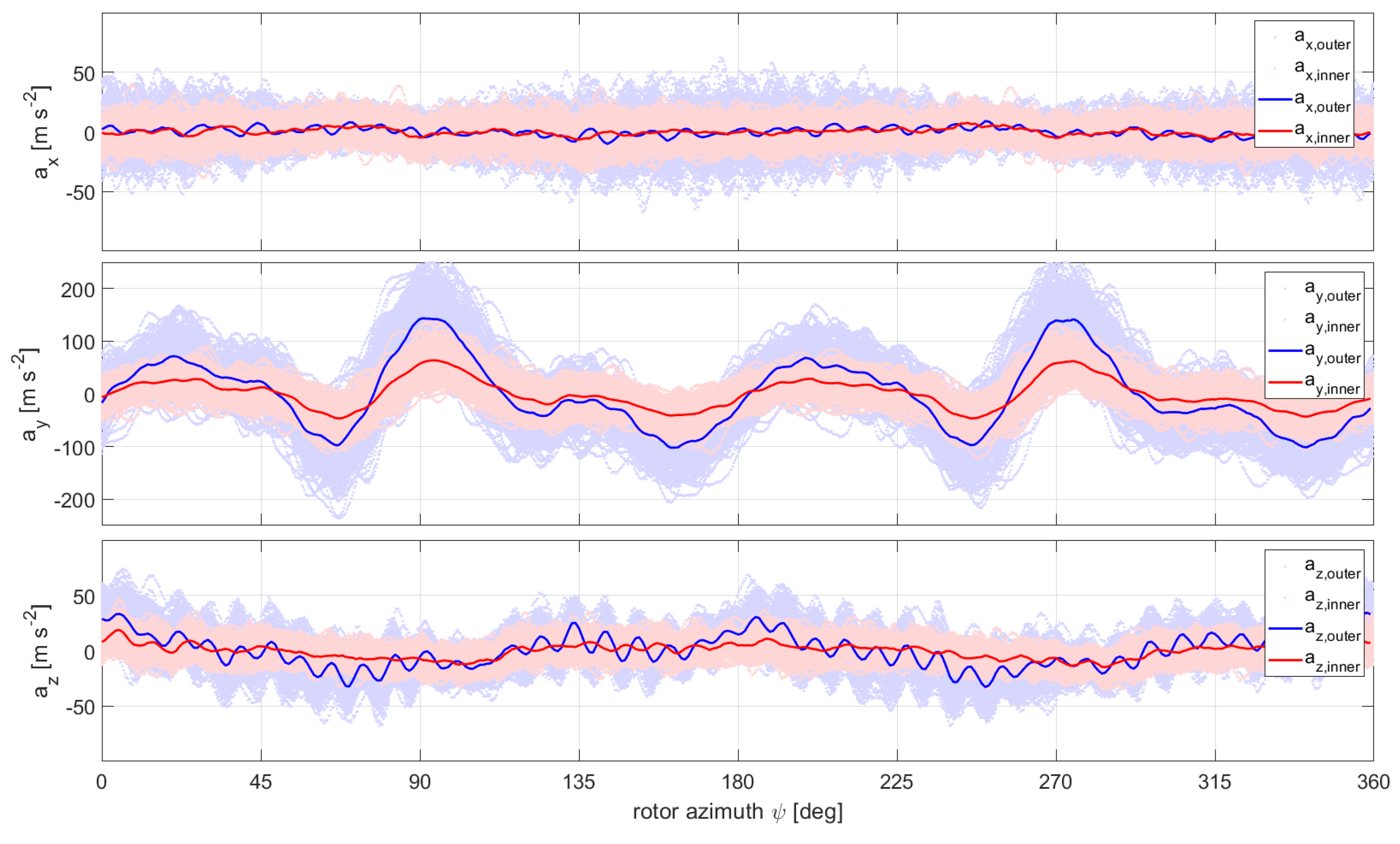
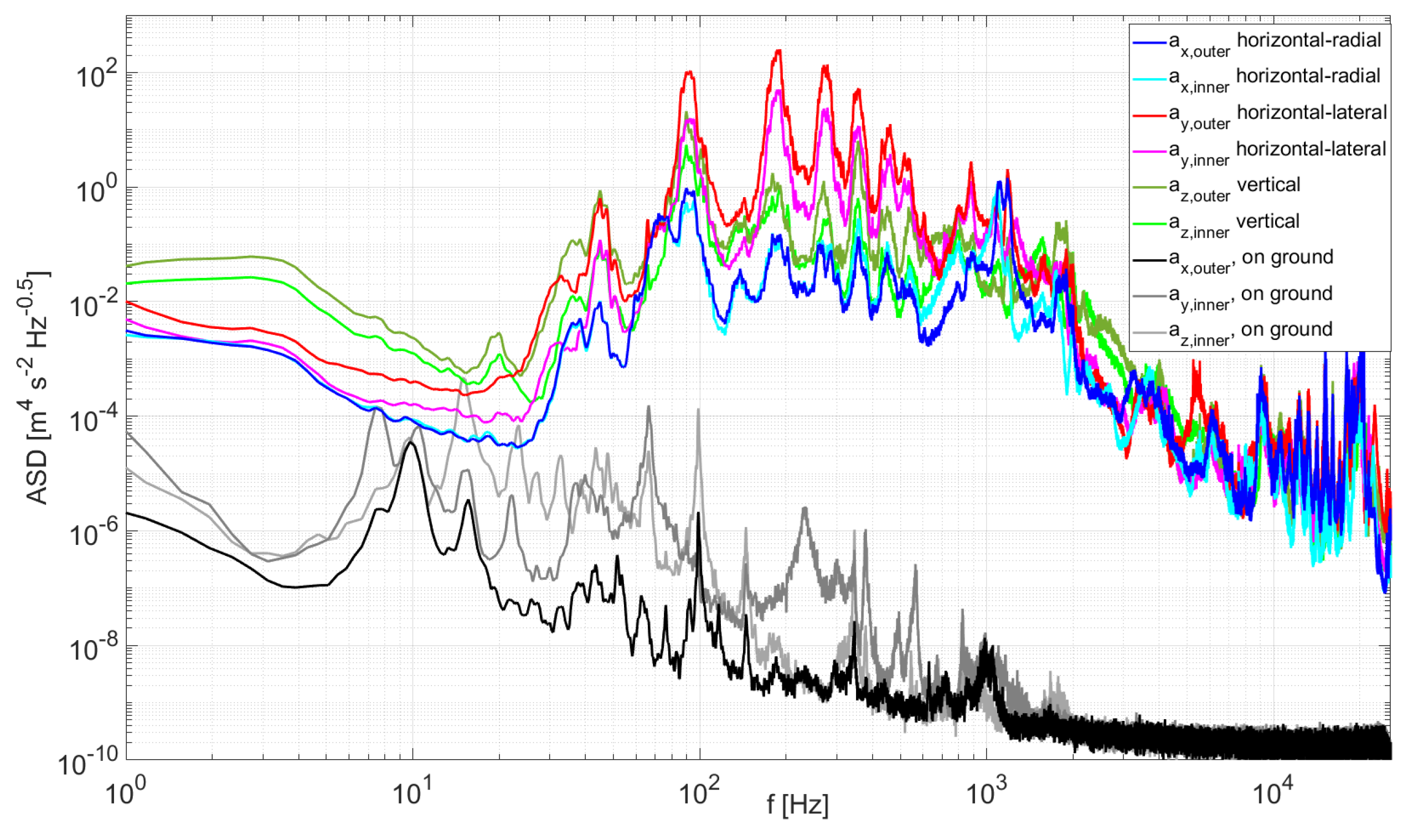
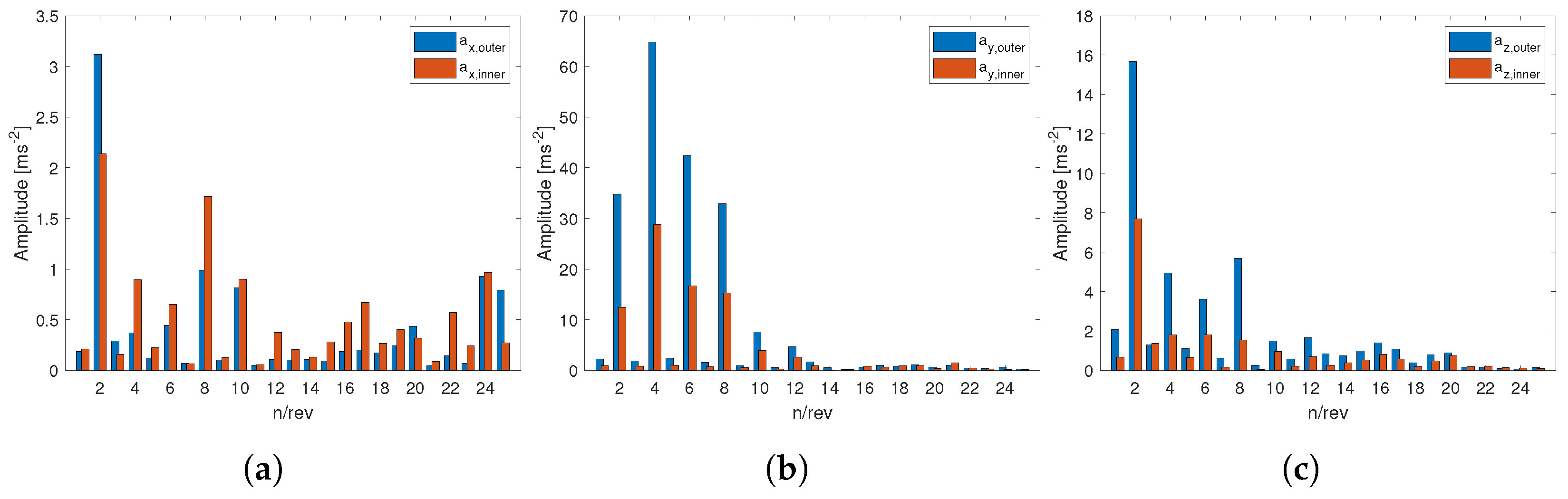
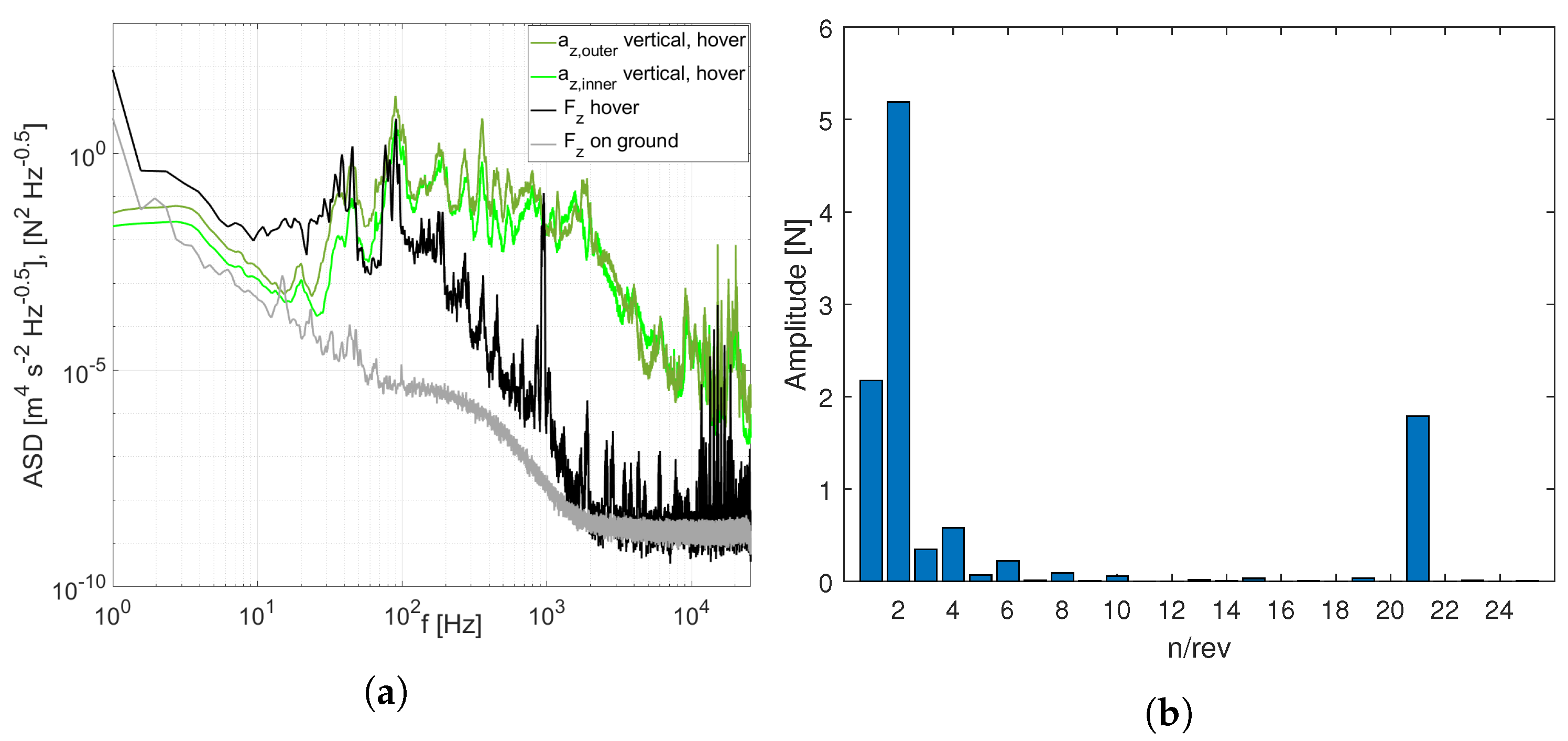
3.3.1. Vibration Measurement Results
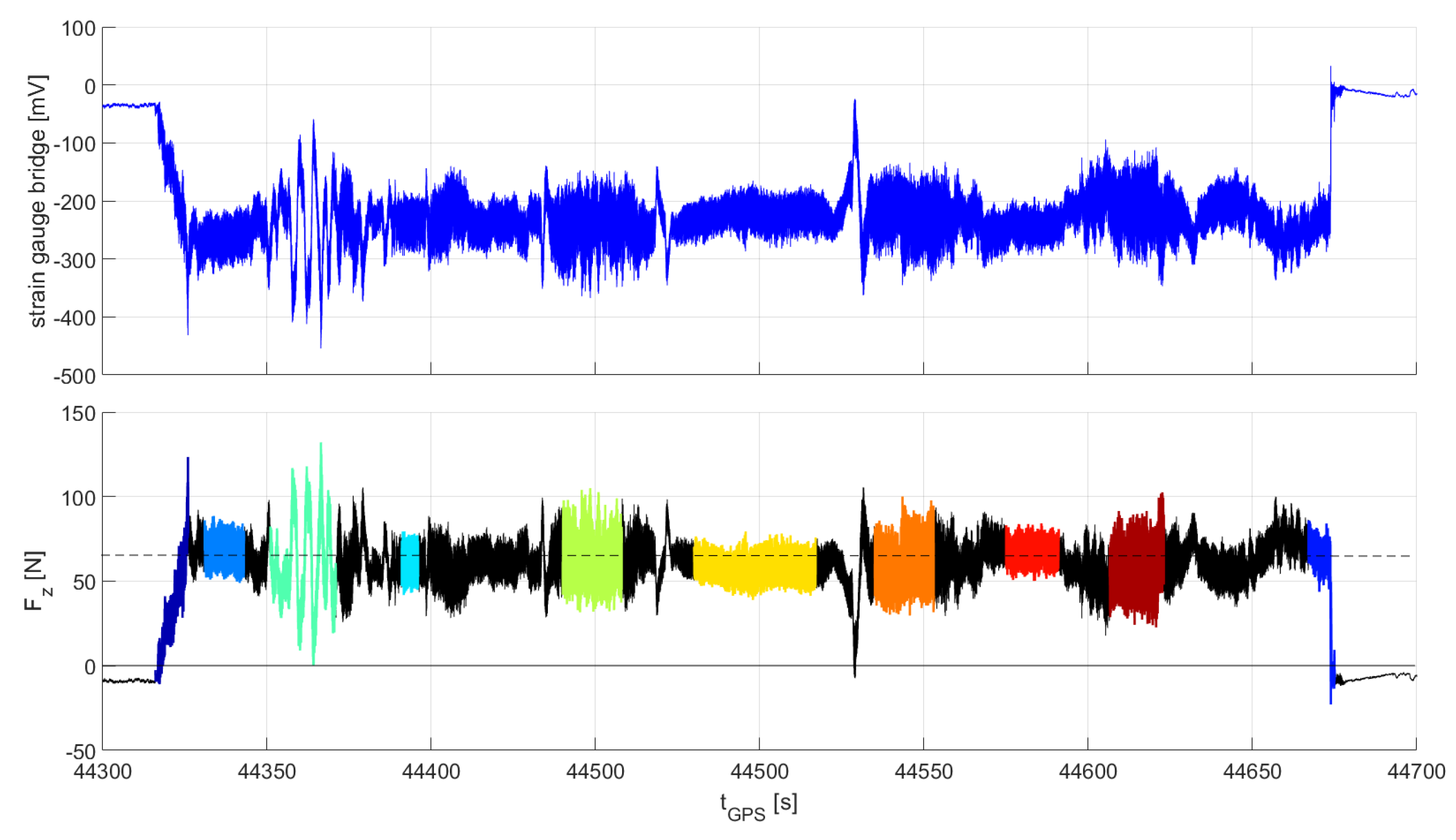
3.3.2. Force Measurement Results
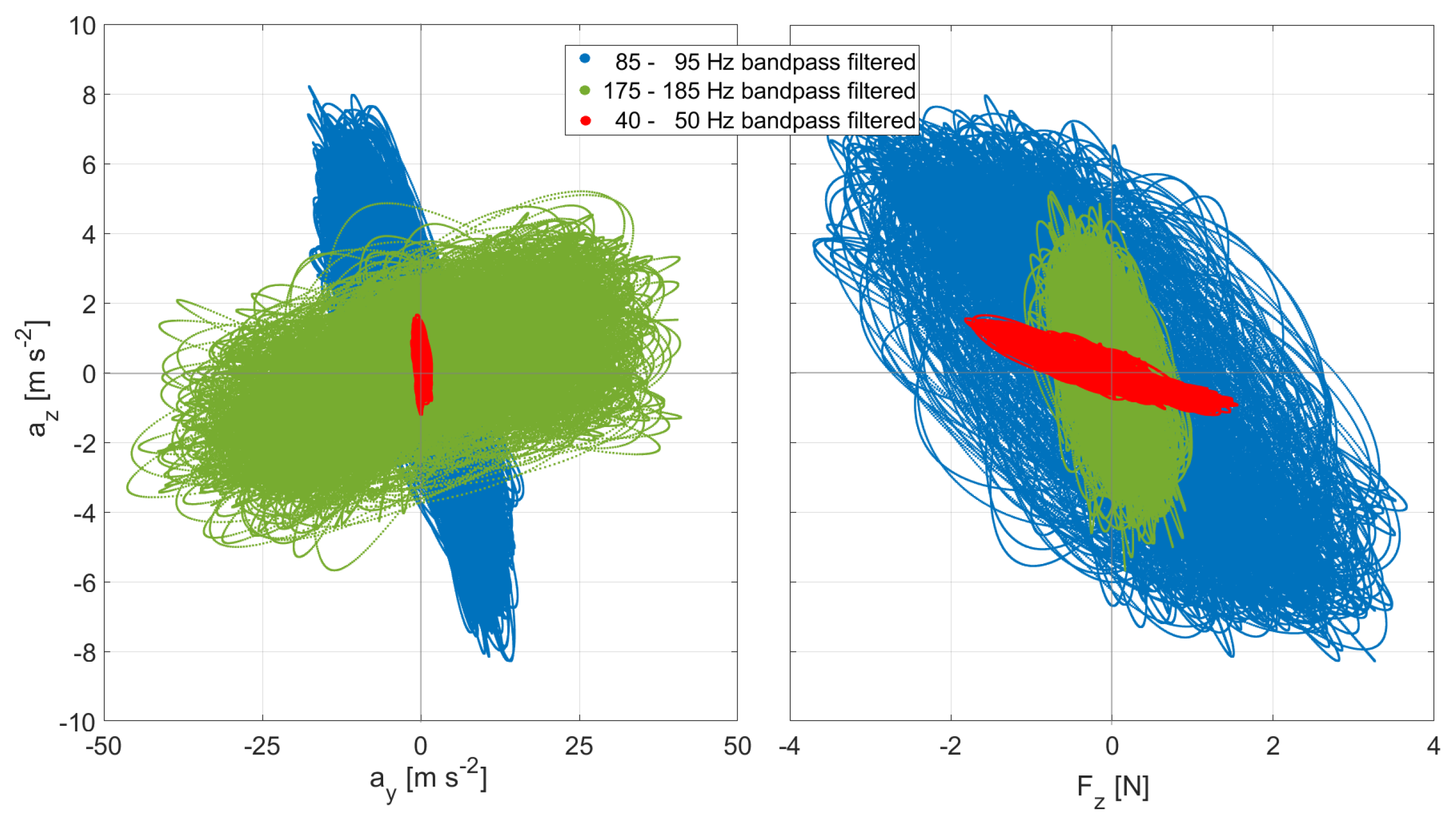
3.3.3. Phase Considerations between Acceleration and Force Measurements
4. Conclusions
- General conclusions about the flight tests:
- The limited number of channels necessitated repeated flight tests with different sensor setups. However, this approach is detrimental to the data quality, as the operating conditions cannot be reproduced perfectly between runs due to, e.g., changing weather and manually flown maneuvers. Future investigations should incorporate an improved data acquisition system with more channels, longer flight phases for improved averaging, and monitoring of operating and ambient conditions. Approaches to minimize the atmospheric turbulence, e.g., by flights in the early morning for stable atmospheric stratification, during parts of the trials should be taken into account.
- Only a single rotor arm was instrumented during the flight tests. While this setup already generates initial knowledge of the system’s characteristics, a deeper analysis of structural vibrations requires instrumentation of all four rotor arms.
- Electromagnetic interference was found for multiple of the onboard electric sensors and traced back to the electric drive train of the quadcopter. Harmonic decomposition of the signal proved to be a powerful method for removing this effect from the measurement signals. Electromagnetic shielding should be considered for the structural sensors to reduce these effects in the future.
- The current tests were conducted with a rather high data acquisition rate of 51.2 kHz. This frequency proved to be unnecessarily high for the targeted application and could be reduced in future studies to facilitate data analysis through reduced processing time. A proper investigation is recommended for identifying the new data rate to avoid unintended signal corruption or missing relevant effects.
- Conclusions about the individual onboard sensors:
- A simple and reliable method for determining the rotor speed and phase was implemented and tested. The system could be further improved by adding more markers over the circumference to better resolve unsteady rotor speed fluctuations and slow rotor speeds.
- The applied pressure measurement setup produced meaningful results, adequately resolving dominant effects due to the rotor wake interaction and comparing well with numerical results. However, the physical presence of the sensors and their mounts is believed to influence the local flow and pressure to be measured. Therefore, the sensor setup should be improved to minimize its effect on the flow, and the setup should also be resolved in the numerical flow simulations.
- Mixed results were obtained for the finewire temperature sensors, whose design was not adjusted for this test campaign. The sensors exhibited high robustness and captured some of the propeller-induced effects but the wire layout and corresponding spatial averaging hindered proper resolution of the fine structures in the propeller wake. Future implementations of this sensor type will first strive to properly resolve all features in the near flow field of the multicopter for validation of numerical methods, before identifying designs and placements that make the sensor less sensitive to propeller interference.
- The used accelerometers are highly suitable for this application and provided meaningful results for the accelerations at selected points on the structure. In the future, the sensor positions should be selected based on numerical or experimental modal analysis to further improve the usability of the results.
- The measured vibrations of the rotor arm are largely caused by the interaction of the rotor wake with the rotor arm. The four times higher acceleration in lateral compared to vertical direction results from a low structural rigidity of the center section in the horizontal plane. Based on the measured data, a life cycle testing program for the structure could be derived.
- Strain gauges were successfully applied, and it was shown that low-frequency structural deformations and dynamic loads can be obtained with them. The low-pass filter characteristics should be adjusted to the desired frequency range for future studies. A structural model can be used to further improve the accuracy of the propeller thrust estimation.
- A first application of the Background-Oriented Schlieren method for in-flight visualization of the propeller tip vortices of a quadcopter was attempted based on a camera mounted on a secondary multicopter. The in-flight results did not reach the same quality obtained in the laboratory experiment. This was mainly due to the operational restrictions for the flight tests and unsuitable background structures available at the test site. Based on the laboratory tests, further improvements should be feasible for the in-flight application and will be pursued in the future.
- Comparison with results from laboratory tests and numerical studies:
- The flight tests were accompanied by laboratory tests to isolate different effects on the sensor signals. Tests without propeller flow allowed analyzing the sensors’ electrical characteristics, while laboratory tests with an isolated propeller were conducted to identify propeller-induced effects without atmospheric disturbances. In addition, flow simulations were carried out for the isolated propeller setup to allow comparison of the different approaches. The combined analysis of these results revealed additional findings that were not apparent in the flight test data alone, therefore showing once again the need for a multi-modal approach in order to gain an overall understanding of the involved flow physics and their interactions with the structure and the sensors on multicopters.
- The comparison between flight test data and numerical simulation results showed that certain flow effects matched decently well between both data sets, like the dominant blade vortices interacting with the rotor arm and sensors around it. This means that relevant parts of the unsteady flow close to the propeller can basically be reproduced by the implemented numerical flow simulations for an isolated propeller. Details, however, differed between flight test and simulation, like negative pressure spikes after the vortex interactions or the temporal development of the temperature fluctuations. The main reason for these discrepancies is thought to stem from the sensor and mounting geometries that were not modelled in the simulation but affect the flow and lead to spatially averaging effects. Further improvements are sought by more accurately determining the ambient and operating conditions during the flight tests and including the sensor geometries in future numerical flow simulations.
- A numerical model of the rotor arm structure to assess elastic and modal properties was not part of this investigation but will undoubtedly be very valuable for future investigations.
- Implications for scientific payload sensors
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lampert, A.; Pätzold, F.; Asmussen, M.; Lobitz, L.; Krüger, T.; Rausch, T.; Sachs, T.; Wille, C.; Sotomayor Zakharov, D.; Gaus, D.; et al. Studying boundary layer methane isotopy and vertical mixing processes at a rewetted peatland site using an unmanned aircraft system. Atmos. Meas. Tech. 2020, 13, 1937–1952. [Google Scholar] [CrossRef]
- Martin, S.; Bange, J.; Beyrich, F. Meteorological profiling of the lower troposphere using the research UAV “M2AV Carolo”. Atmos. Meas. Tech. 2011, 4, 705–716. [Google Scholar] [CrossRef]
- Alamouri, A.; Lampert, A.; Gerke, M. An Exploratory Investigation of UAS Regulations in Europe and the Impact on Effective Use and Economic Potential. Drones 2021, 5, 63. [Google Scholar] [CrossRef]
- Van den Kroonenberg, A.C.; Martin, T.; Buschmann, M.; Bange, J.; Vörsmann, P. Measuring the Wind Vector Using the Autonomous Mini Aerial Vehicle M2AV. J. Atmos. Ocean. Technol. 2008, 25, 1969–1982. [Google Scholar] [CrossRef]
- Reuder, J.; Brisset, P.; Jonassen, M.; Mayer, S. The Small Unmanned Meteorological Observer SUMO: A new tool for atmospheric boundary layer research. Meteorol. Z. 2009, 18, 141–147. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of Small Fixed-Wing Unmanned Aircraft for Meteorological Sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Lampert, A.; Pätzold, F.; Jiménez, M.A.; Lobitz, L.; Martin, S.; Lohmann, G.; Canut, G.; Legain, D.; Bange, J.; Martínez-Villagrasa, D.; et al. A study of local turbulence and anisotropy during the afternoon and evening transition with an unmanned aerial system and mesoscale simulation. Atmos. Chem. Phys. 2016, 16, 8009–8021. [Google Scholar] [CrossRef]
- Altstädter, B.; Platis, A.; Wehner, B.; Scholtz, A.; Wildmann, N.; Hermann, M.; Käthner, R.; Baars, H.; Bange, J.; Lampert, A. ALADINA—An unmanned research aircraft for observing vertical and horizontal distributions of ultrafine particles within the atmospheric boundary layer. Atmos. Meas. Tech. 2015, 8, 1627–1639. [Google Scholar] [CrossRef]
- Lee, J.; Park, J.; Kim, J. Vertical measurement of equivalent black carbon concentration at low altitude. Appl. Sci. 2020, 10, 5142. [Google Scholar] [CrossRef]
- Wu, C.; Liu, B.; Wu, D.; Yang, H.; Mao, X.; Tan, J.; Liang, Y.; Sun, J.Y.; Xia, R.; Sun, J. Vertical profiling of black carbon and ozone using a multicopter unmanned aerial vehicle (UAV) in urban Shenzhen of South China. Sci. Total Environ. 2021, 801, 149689. [Google Scholar] [CrossRef]
- Chiba, T.; Haga, Y.; Inoue, M.; Kiguchi, O.; Nagayoshi, T.; Madokoro, H.; Morino, I. Measuring regional atmospheric CO2 concentrations in the lower troposphere with a non-dispersive infrared analyzer mounted on a UAV, Ogata Village, Akita, Japan. Atmosphere 2019, 10, 487. [Google Scholar] [CrossRef]
- Barchyn, T.E.; Hugenholtz, C.H.; Fox, T.A. Plume detection modeling of a drone-based natural gas leak detection system. Elem. Sci. Anthr. 2019, 7, 41. [Google Scholar] [CrossRef]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed]
- Lampert, A.; Altstädter, B.; Bärfuss, K.; Bretschneider, L.; Sandgaard, J.; Lobitz, L.; Asmussen, M.; Damm, E.; Käthner, R.; Krüger, T.; et al. Unmanned Aerial Systems for Investigating the Polar Atmospheric Boundary Layer—Technical Challenges and Examples of Applications. Atmosphere 2020, 11, 416. [Google Scholar] [CrossRef]
- Bärfuss, K.; Dirksen, R.; Schmithüsen, H.; Bretschneider, L.; Pätzold, F.; Bollmann, S.; Panten, P.; Rausch, T.; Lampert, A. Drone-Based Atmospheric Soundings up to an Altitude of 10 km - Technical Approach towards Operations. Drones 2022, 6, 404. [Google Scholar] [CrossRef]
- Bärfuss, K.B.; Schmithüsen, H.; Lampert, A. Drone-based meteorological observations up to the tropopause. Atmos. Meas. Tech. Discuss. 2023, 16, 3739–3765. [Google Scholar] [CrossRef]
- Simma, M.; Mjøen, H.; Boström, T. Measuring Wind Speed Using the Internal Stabilization System of a Quadrotor Drone. Drones 2020, 4, 23. [Google Scholar] [CrossRef]
- Thielicke, W.; Hübert, W.; Müller, U.; Eggert, M.; Wilhelm, P. Towards accurate and practical drone-based wind measurements with an ultrasonic anemometer. Atmos. Meas. Tech. 2021, 14, 1303–1318. [Google Scholar] [CrossRef]
- Chilson, P.B.; Bell, T.M.; Brewster, K.A.; Britto Hupsel de Azevedo, G.; Carr, F.H.; Carson, K.; Doyle, W.; Fiebrich, C.A.; Greene, B.R.; Grimsley, J.L.; et al. Moving towards a Network of Autonomous UAS Atmospheric Profiling Stations for Observations in the Earth’s Lower Atmosphere: The 3D Mesonet Concept. Sensors 2019, 19, 2720. [Google Scholar] [CrossRef]
- De Boer, G.; Diehl, C.; Jacob, J.; Houston, A.; Smith, S.W.; Chilson, P.; Schmale, D.G.; Intrieri, J.; Pinto, J.; Elston, J.; et al. Development of Community, Capabilities, and Understanding through Unmanned Aircraft-Based Atmospheric Research—The LAPSE-RATE Campaign. Bull. Am. Meteorol. Soc. 2020, 101, 684–699. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef]
- Smith, B.; John, G.; Stark, B.; Christensen, L.E.; Chen, Y.Q. Applicability of Unmanned Aerial Systems for Leak Detection. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016. [Google Scholar]
- Brosy, C.; Krampf, K.; Zeeman, M.; Wolf, B.; Junkermann, W.; Schäfer, K.; Emeis, S.; Kunstmann, H. Simultaneous multicopter-based air sampling and sensing of meteorological variables. Atmos. Meas. Tech. 2017, 10, 2773–2784. [Google Scholar] [CrossRef]
- Shah, A.; Allen, G.; Pitt, J.R.; Ricketts, H.; Williams, P.I.; Helmore, J.; Finlayson, A.; Robinson, R.; Kabbabe, K.; Hollingsworth, P.; et al. A Near-Field Gaussian Plume Inversion Flux Quantification Method, Applied to Unmanned Aerial Vehicle Sampling. Atmosphere 2019, 10, 396. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems. Sensors 2019, 19, 1470. [Google Scholar] [CrossRef] [PubMed]
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign. Sensors 2019, 19, 2179. [Google Scholar] [CrossRef] [PubMed]
- Lampert, A.; Hartmann, J.; Pätzold, F.; Lobitz, L.; Hecker, P.; Kohnert, K.; Larmanou, E.; Serafimovich, A.; Sachs, T. Comparison of Lyman-alpha and LI-COR infrared hygrometers for airborne measurement of turbulent fluctuations of water vapour. Atmos. Meas. Tech. 2018, 11, 2523–2536. [Google Scholar] [CrossRef]
- Yoon, S.; Diaz, P.V.; Boyd, D.D., Jr.; Chan, W.M.; Theodore, C.R. Computational Aerodynamic Modeling of Small Quadcopter Vehicles. In Proceedings of the American Helicopter Society 73rd Annual Forum, Fort Worth, TX, USA, 8–11 May 2017. [Google Scholar]
- Wang, Z.; Henricks, Q.; Zhuang, M.; Pandey, A.; Sutkowy, M.; Harter, B.; McCrink, M.; Gregory, J. Impact of Rotor–Airframe Orientation on the Aerodynamic and Aeroacoustic Characteristics of Small Unmanned Aerial Systems. Drones 2019, 3, 56. [Google Scholar] [CrossRef]
- Ghirardelli, M.; Kral, S.T.; Müller, N.C.; Hann, R.; Cheynet, E.; Reuder, J. Flow Structure around a Multicopter Drone: A Computational Fluid Dynamics Analysis for Sensor Placement Considerations. Drones 2023, 7, 467. [Google Scholar] [CrossRef]
- Suchanek, G.; Filipek, R.; Golas, A. Design and Implementation of a Particulate Matter Measurement System for Energy-Efficient Searching of Air Pollution Sources Using a Multirotor Robot. Energies 2023, 16, 2959. [Google Scholar] [CrossRef]
- Bretschneider, L.; Schlerf, A.; Baum, A.; Bohlius, H.; Buchholz, M.; Düsing, S.; Ebert, V.; Erraji, H.; Frost, P.; Käthner, R.; et al. MesSBAR—Multicopter and Instrumentation for Air Quality Research. Atmosphere 2022, 13, 629. [Google Scholar] [CrossRef]
- Schlerf, A.; Baum, A.; Bohlius, H.; Bretschneider, L.; Buchholz, M.; Del, A.; Düsing, S.; Ebert, V.; Kim, M.E.; Erraji, H.; et al. Multikopter als fliegende Luftschadstoffmessstationen? Immissionsschutz 2022, 3, 121–129. [Google Scholar] [CrossRef]
- Bärfuss, K.; Pätzold, F.; Altstädter, B.; Kathe, E.; Nowak, S.; Bretschneider, L.; Bestmann, U.; Lampert, A. New Setup of the UAS ALADINA for Measuring Boundary Layer Properties, Atmospheric Particles and Solar Radiation. Atmosphere 2018, 9, 28. [Google Scholar] [CrossRef]
- Pätzold, F.; Schlerf, A.; Bretschneider, L.; Bauknecht, A. Multicopter In-Flight Measurement Data of Flow Field and Structure States. Data Set. Available online: https://leopard.tu-braunschweig.de/receive/dbbs_mods_00070168 (accessed on 21 July 2023).
- Kulite Semiconductor Products, Inc.: Miniature Ruggedized Pressure Transducer XT-190 (M) Series, Data Sheet, 1 p. 2018. Available online: https://kulite.com/products/product-advisor/product-catalog/miniature-ruggedized-pressure-transducer-xt-190m (accessed on 20 March 2023).
- Richard, H.; Raffel, M. Principle and applications of the background oriented schlieren (BOS) method. Meas. Sci. Technol. 2001, 12, 1576–1585. [Google Scholar] [CrossRef]
- Venkatakrishnan, L.; Meier, G.E.A. Density measurements using the Background Oriented Schlieren technique. Exp. Fluids 2004, 37, 237–247. [Google Scholar] [CrossRef]
- Bauknecht, A.; Merz, C.B.; Raffel, M.; Landolt, A.; Meier, A.H. Blade-Tip Vortex Detection in Maneuvering Flight Using the Background-Oriented Schlieren Technique. J. Aircr. 2014, 51, 2005–2014. [Google Scholar] [CrossRef]
- Bauknecht, A.; Merz, C.B.; Raffel, M. Airborne visualization of helicopter blade tip vortices. J. Vis. 2016, 20, 139–150. [Google Scholar] [CrossRef]
- Hargather, M.J.; Settles, G.S. Natural-background-oriented schlieren imaging. Exp. Fluids 2010, 48, 59–68. [Google Scholar] [CrossRef]
- Sanchez-Cuevas, P.; Heredia, G.; Ollero, A. Characterization of the aerodynamic ground effect and its influence in multirotor control. Int. J. Aerosp. Eng. 2017, 17, 1823056. [Google Scholar] [CrossRef]
- Hunt, J.C.R.; Wray, A.; Moin, P. Eddies, stream, and convergence zones in turbulent flows. In Center for Turbulence Research Report CTR-S88; Stanford University: Stanford, CA, USA, 1988. [Google Scholar]
- Shih, T.; Liou, W.; Shabbir, A.; Yang, Z.; Zhu, J. A New k-epsilon Eddy Viscosity Model for High Reynolds Number Turbulent Flows. Comput. Fluids 1995, 10, 227–238. [Google Scholar] [CrossRef]
- Cabezón, D.; Sanz, J.; Martí, I.; Crespo, A. CFD modelling of the interaction between the Surface Boundary Layer and rotor wake. Comparison of results obtained with different turbulence models and mesh strategies. In Proceedings of the European Wind Energy Conference and Exhibition (EWEC), Marseille, France, 16–19 March 2009; pp. 1–7. [Google Scholar]
- Mohamed, M.H. Performance investigation of H-rotor Darrieus turbine with new airfoil shapes. Energy 2012, 47, 522–530. [Google Scholar] [CrossRef]
- Chue, S.H. Pressure probes for fluid measurements. Prog. Aerosp. Sci. 1975, 16, 147–223. [Google Scholar] [CrossRef]
- Bauknecht, A.; Schwarz, C.; Raffel, M.; Mailänder, S. Flow Measurement Techniques for Rotor Wake Characterization on Free-Flying Helicopters in Ground Effect. In Proceedings of the AIAA Scitech Forum, San Diego, CA, USA, 7–11 January 2019; pp. 1–19. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pätzold, F.; Bauknecht, A.; Schlerf, A.; Sotomayor Zakharov, D.; Bretschneider, L.; Lampert, A. Flight Experiments and Numerical Simulations for Investigating Multicopter Flow Field and Structure Deformation. Atmosphere 2023, 14, 1336. https://doi.org/10.3390/atmos14091336
Pätzold F, Bauknecht A, Schlerf A, Sotomayor Zakharov D, Bretschneider L, Lampert A. Flight Experiments and Numerical Simulations for Investigating Multicopter Flow Field and Structure Deformation. Atmosphere. 2023; 14(9):1336. https://doi.org/10.3390/atmos14091336
Chicago/Turabian StylePätzold, Falk, André Bauknecht, Andreas Schlerf, Denis Sotomayor Zakharov, Lutz Bretschneider, and Astrid Lampert. 2023. "Flight Experiments and Numerical Simulations for Investigating Multicopter Flow Field and Structure Deformation" Atmosphere 14, no. 9: 1336. https://doi.org/10.3390/atmos14091336
APA StylePätzold, F., Bauknecht, A., Schlerf, A., Sotomayor Zakharov, D., Bretschneider, L., & Lampert, A. (2023). Flight Experiments and Numerical Simulations for Investigating Multicopter Flow Field and Structure Deformation. Atmosphere, 14(9), 1336. https://doi.org/10.3390/atmos14091336