




Faster, Better, Cheaper: Solutions to the Atmospheric Shipping Emission Compliance and Attribution Conundrum

 , ,
, , 
Abstract
1. Introduction
1.1. Regulatory Background
1.2. The Problem
1.3. A Potential Solution
- Trial 1 took place in Plymouth (UK) on 2 March 2017. It proved the concept of telemetering live engine emission data, which were measured using an inline FTIR, from the PML Research Vessel (RV) Plymouth Quest and transmitted using a standard AIS VHF.
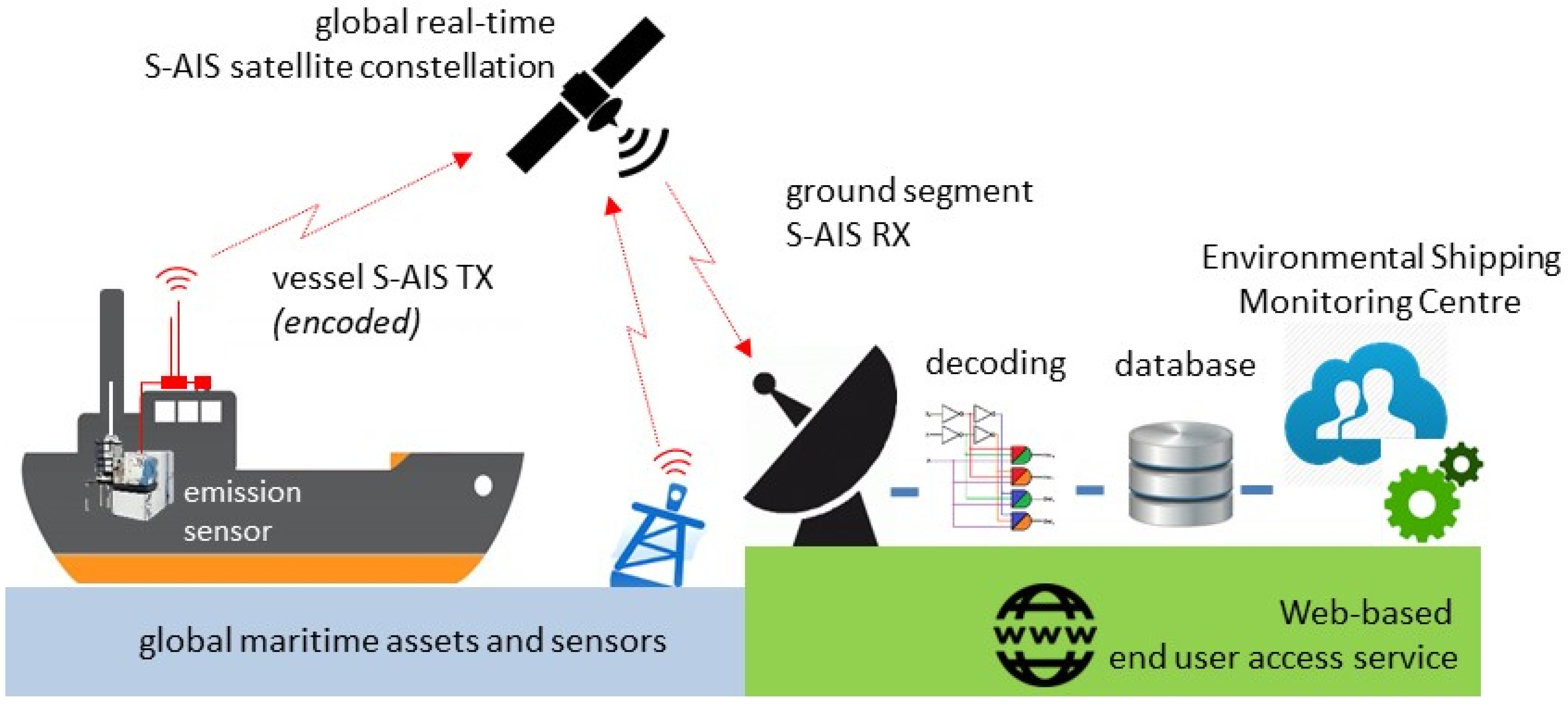
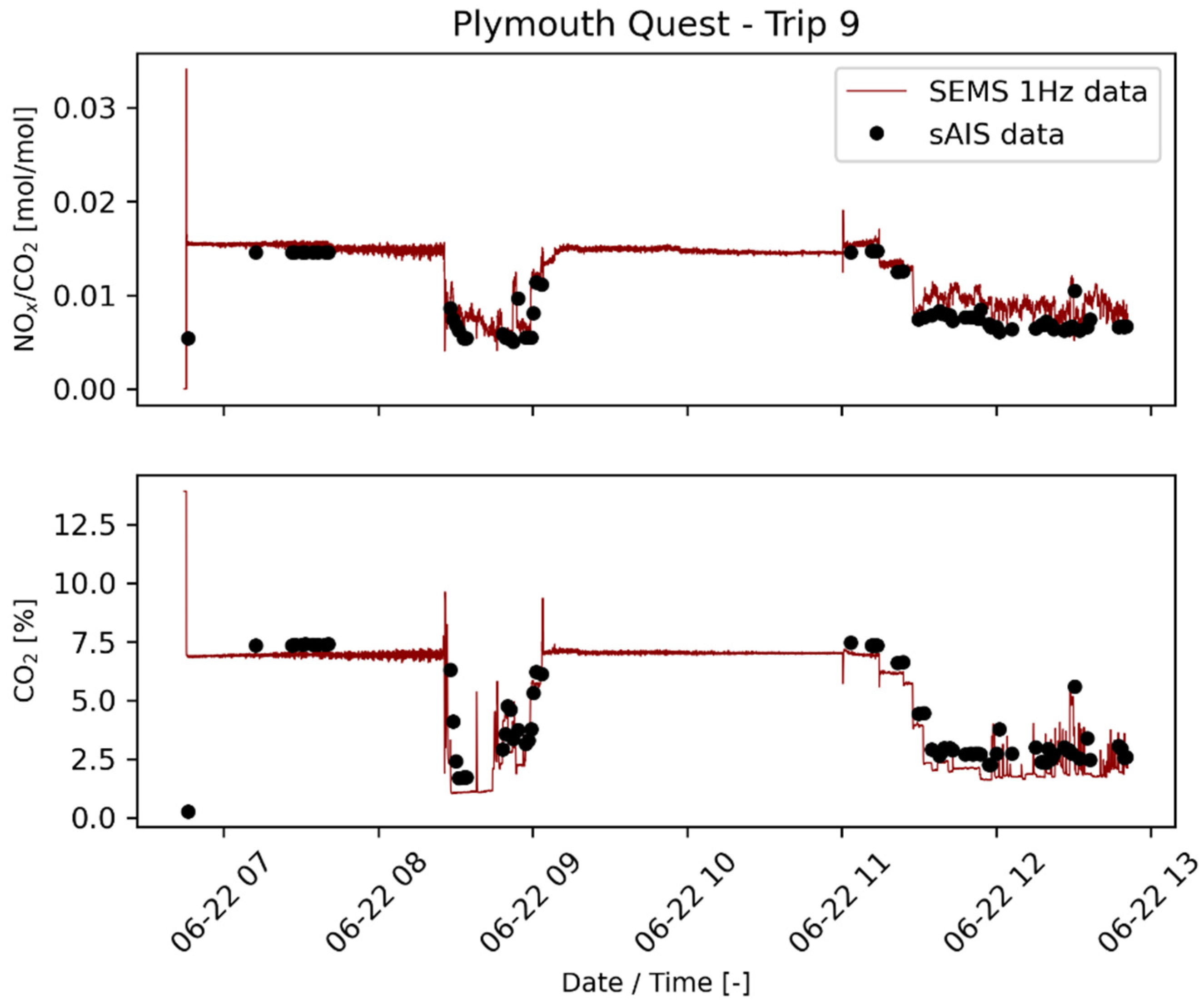
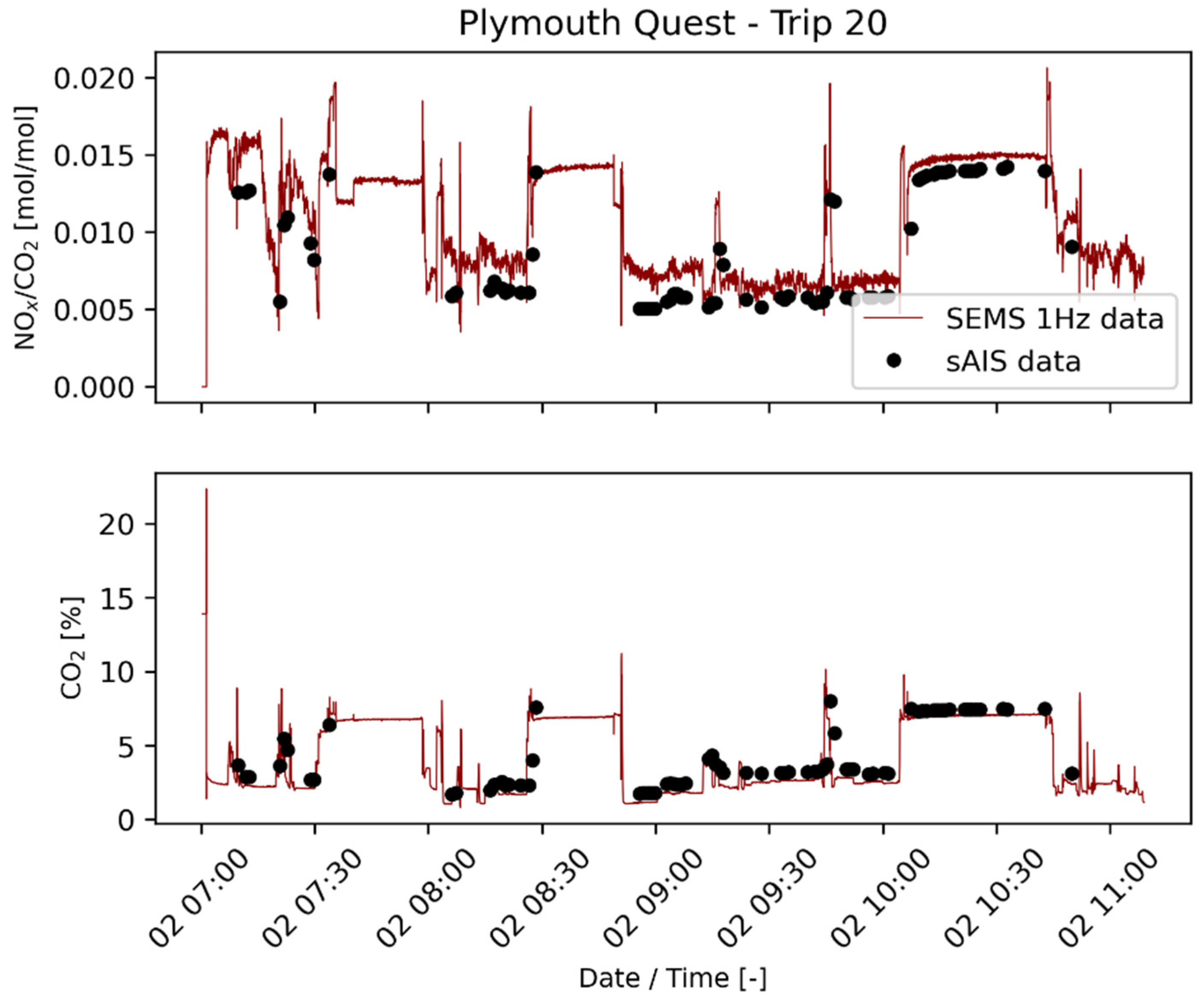
- Trial 2, as part of the EU Horizon 2020 project SCIPPER (Shipping Contributions to Inland Pollution Push for the Enforcement of Regulations), similarly used RV Plymouth Quest operating out of Plymouth between May and August 2021, but using a relatively low-cost solution inline sensor package and telemetered data live via satellite AIS (S-AIS) or 4G cellular connection when returned to port.
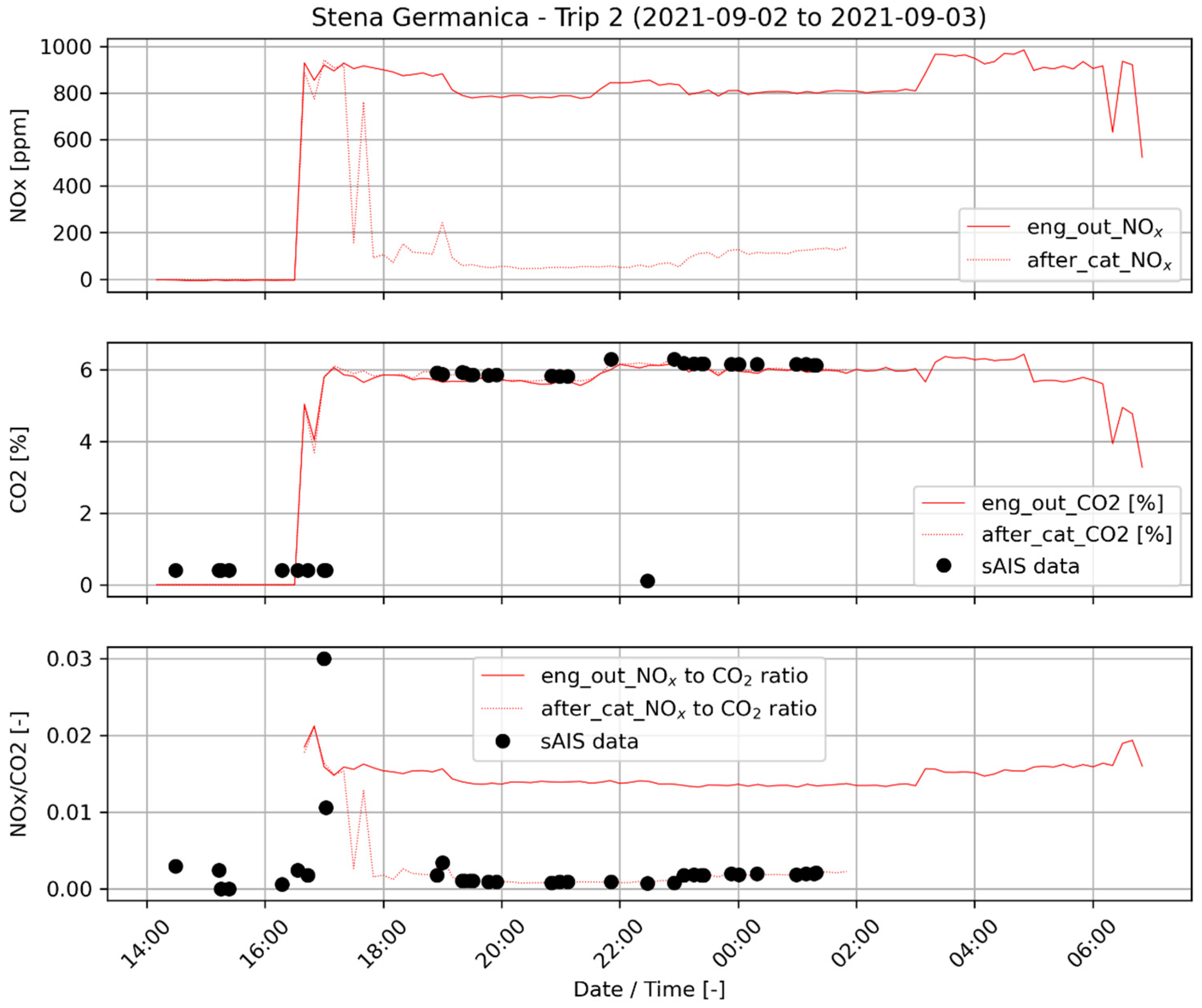
- Trial 3 used a measurement package configuration similar to trial 2, but the vessel used was the Ro-Ro/passenger ship Stena Germanica, operating between Gothenburg (SE) and Kiel (DE) for the period 31 August–11 September 2021 (SCIPPER Project Campaign 2).
2. Materials and Methods
- (1)
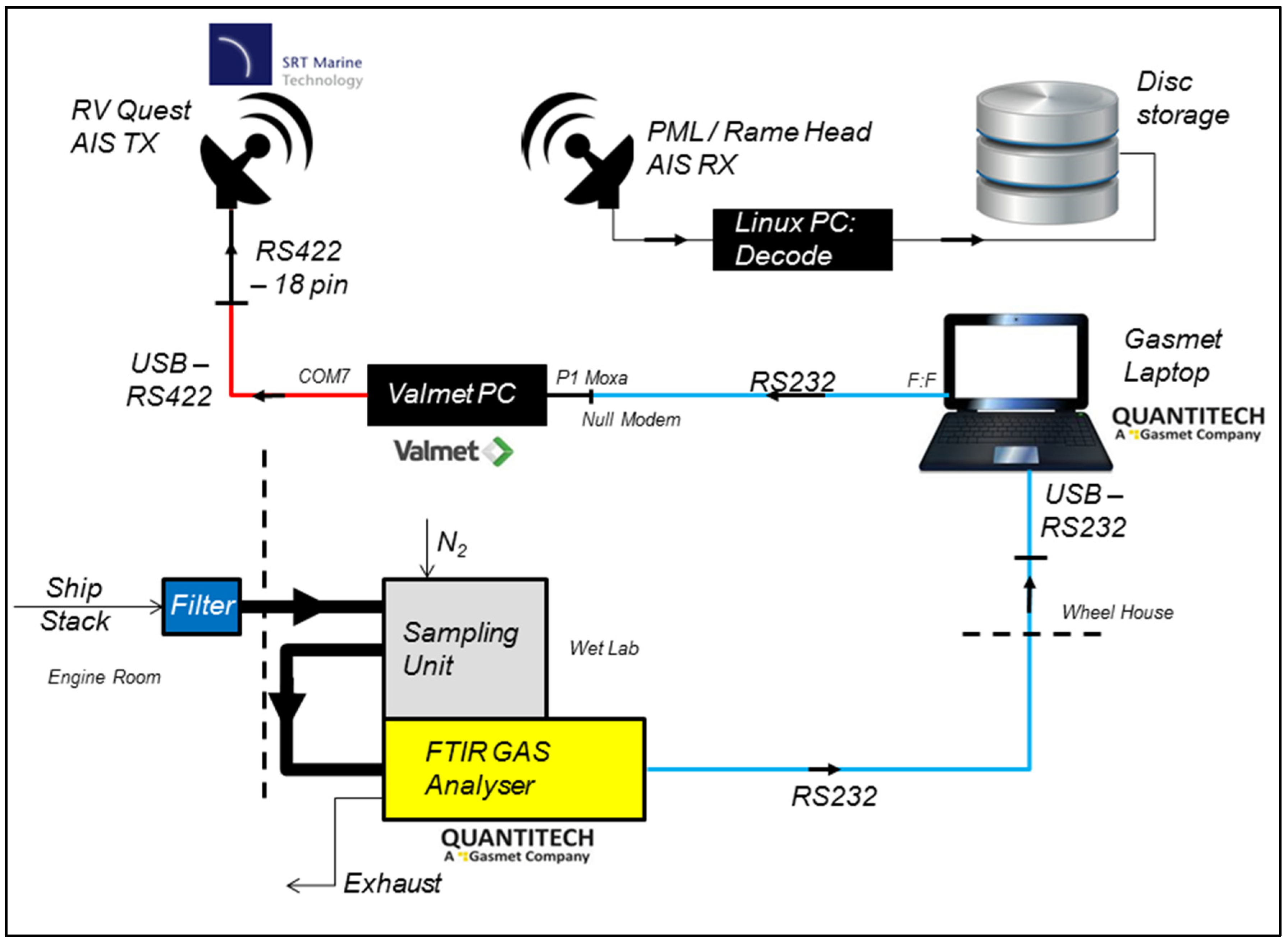
- An inlet valve was attached to the ship’s exhaust within the engine room so that a filter could be joined to allow direct sampling of the gases emitted. This was connected, via heated lines, to the Gasmet sampling unit, situated a short distance away in the ship’s wet laboratory. This unit also drew in N2 gas from a bottled supply to act as a zero-calibration standard. The sampling unit fed into a Gasmet FTIR gas analyser, which is capable of simultaneously quantifying 16 or more gases using their known spectroscopic responses.
- (2)
- The gas concentration data were then sent every minute using an RS-232 serial connection to a controlling Laptop PC situated in the ship’s wheelhouse. The data were reduced at this stage to reporting only four channels of IFGC: a diagnostic value for the FTIR, SO2, CO2, and NOx (reported as NO2). The data were then passed via an RS-232 serial connection to the Valmet PC for onward systems control processing. The Valmet PC read the serial input from the Gasmet system every 60 s, stored the value in the DNA Historian database, and converted the data into an AIS Message 8 “binary broadcast message” (BBM—see Appendix A).
- (3)
- The AIS message was then subsequently sent to the SRT-Marine Apollo AIS transceiver (every 60 s) via RS-422 for onward RF transmission. The data were transmitted by the AIS transceiver and received at both Rame Head (50.317° N, 4.220° W) and PML (50.366° N, 4.148° W).
- (4)
- Each AIS Message 8 received and attributed to the unique MMSI of the RV Plymouth Quest (235017045) was then merged with the closest in time values of its position, speed and course (AIS Message 1).
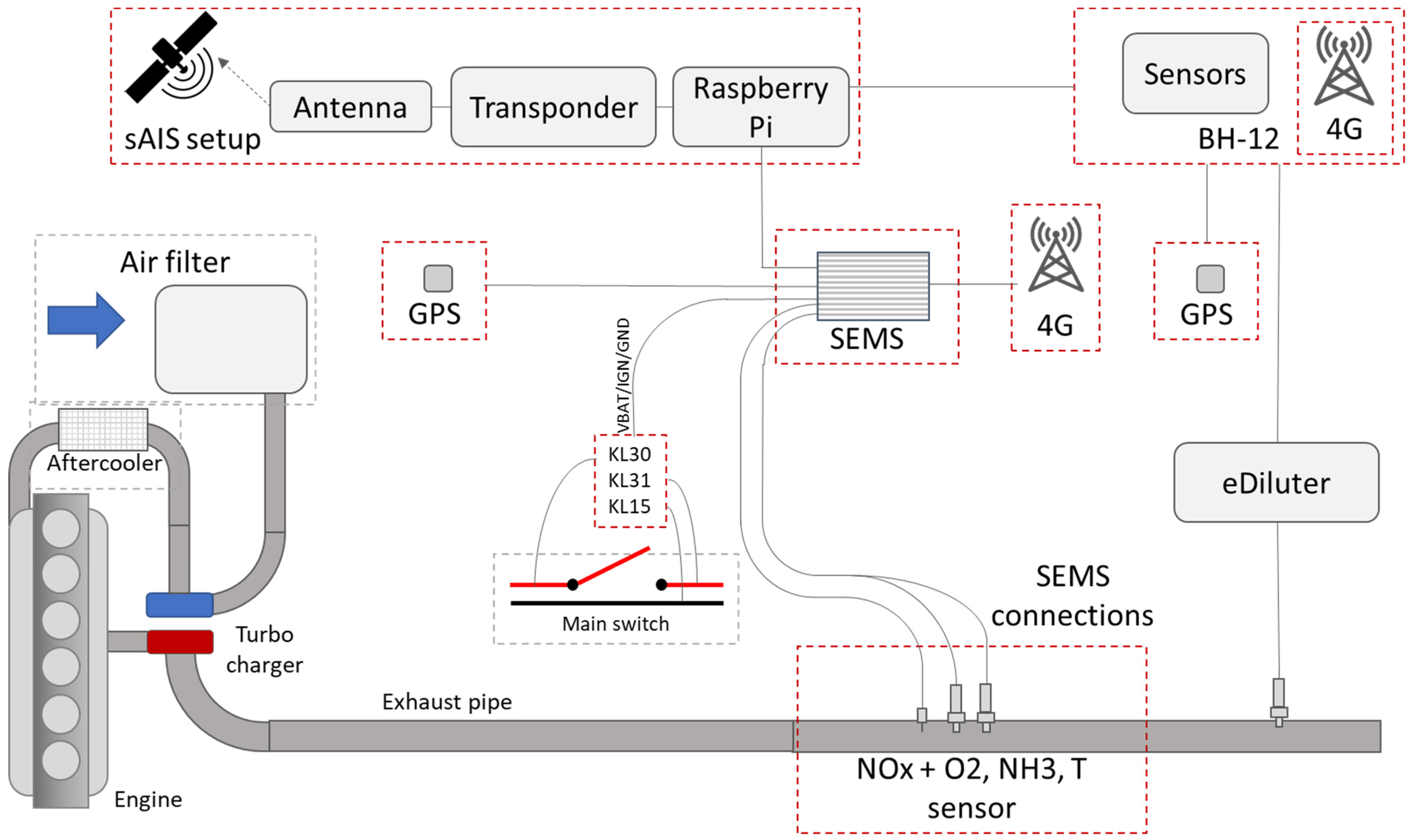
- Data are polled from the SEMS (every minute) via RS-232/USB by the Raspberry Pi.
- Data are then converted into a 113-bit binary data payload format (see Appendix B) by the Raspberry Pi.
- The binary payload data are then encapsulated within a 6 bit ASCII string compliant with the exactSeNS message payload NMEA protocol by the Raspberry Pi.
- The complete exactSeNS message wrapper is then created on the AllTek AIS transceiver and transmitted for S-AIS detection.
3. Results
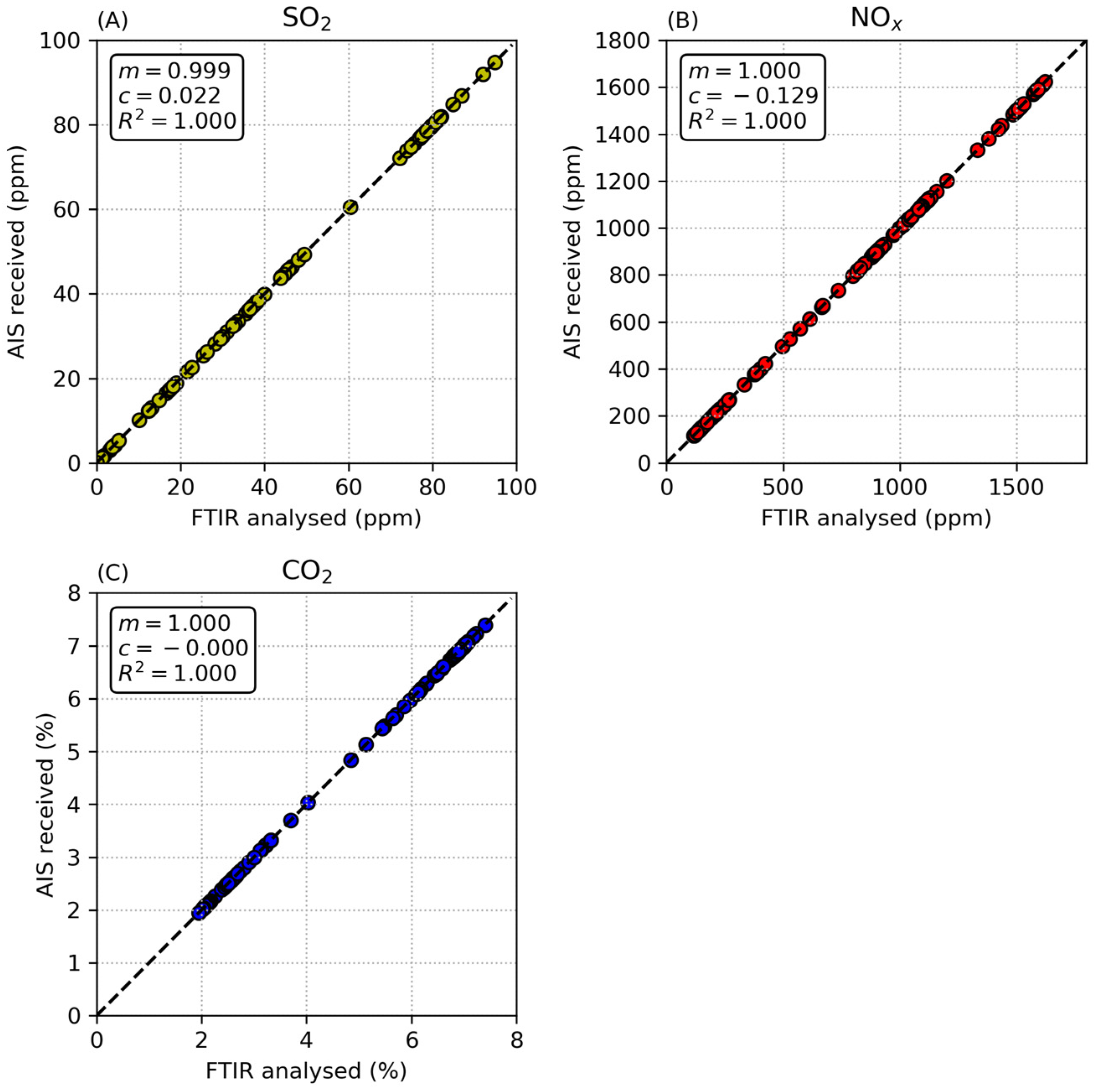
3.1. Trial 1: Plymouth (UK), 2 March 2017
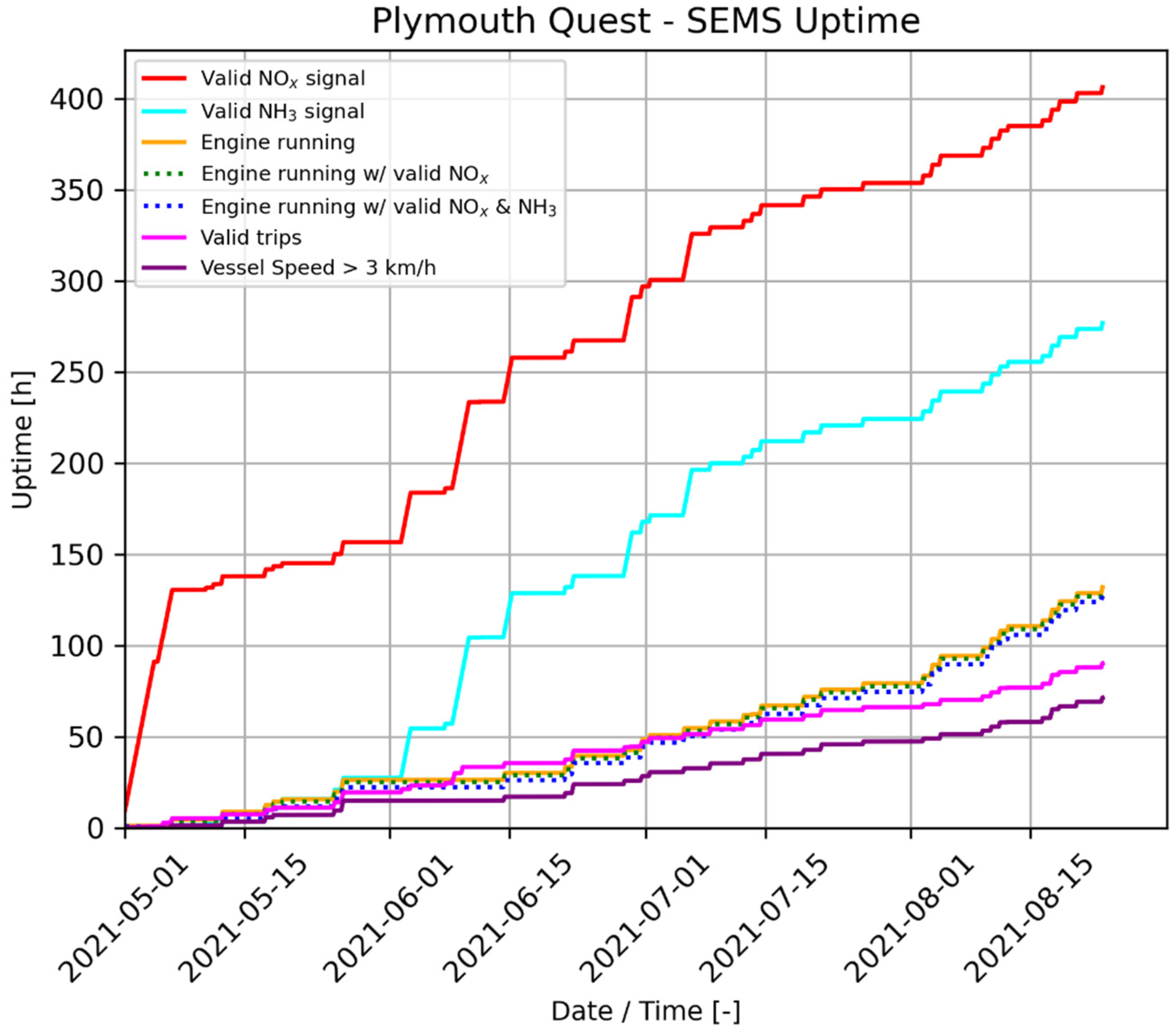
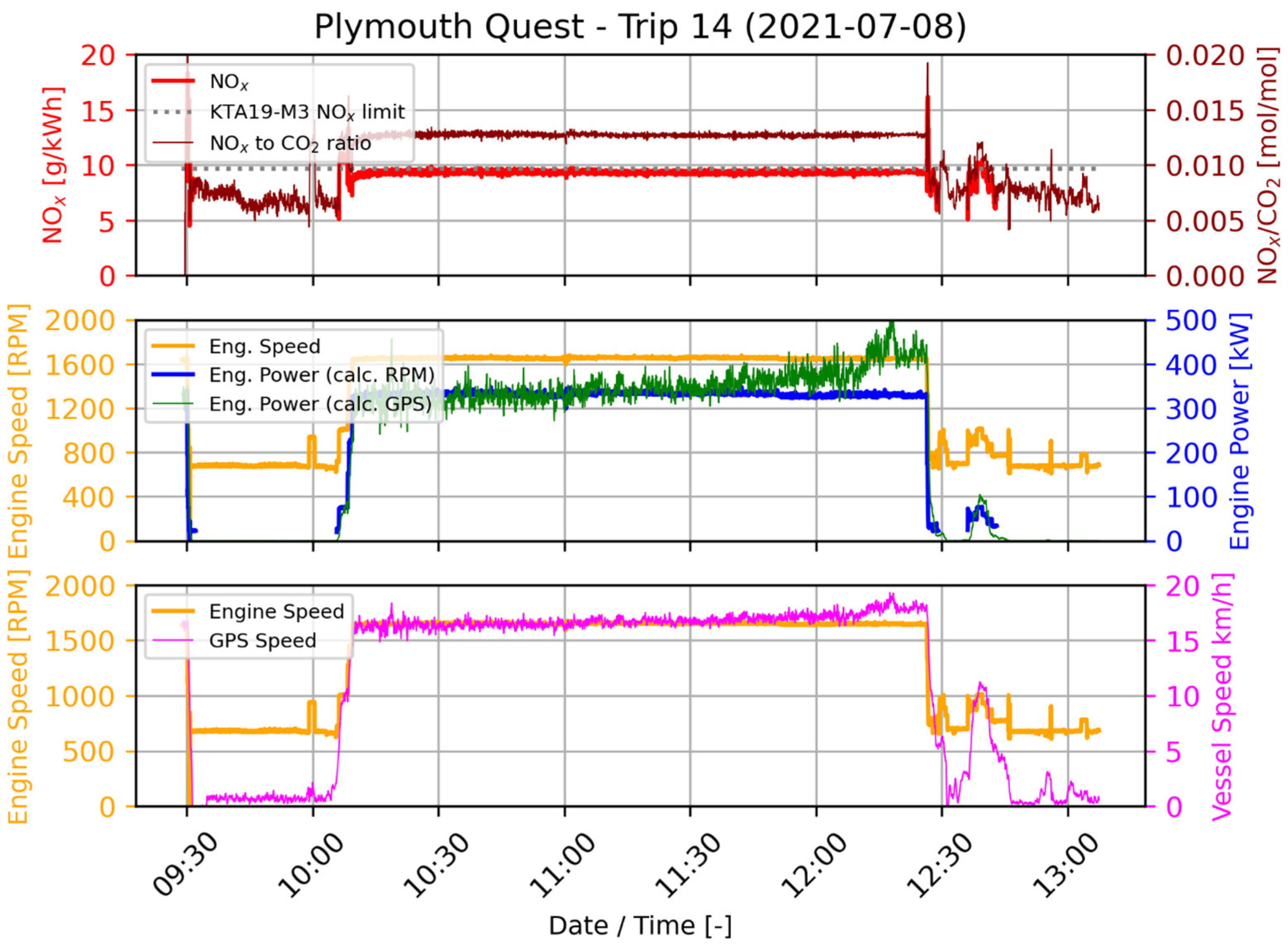
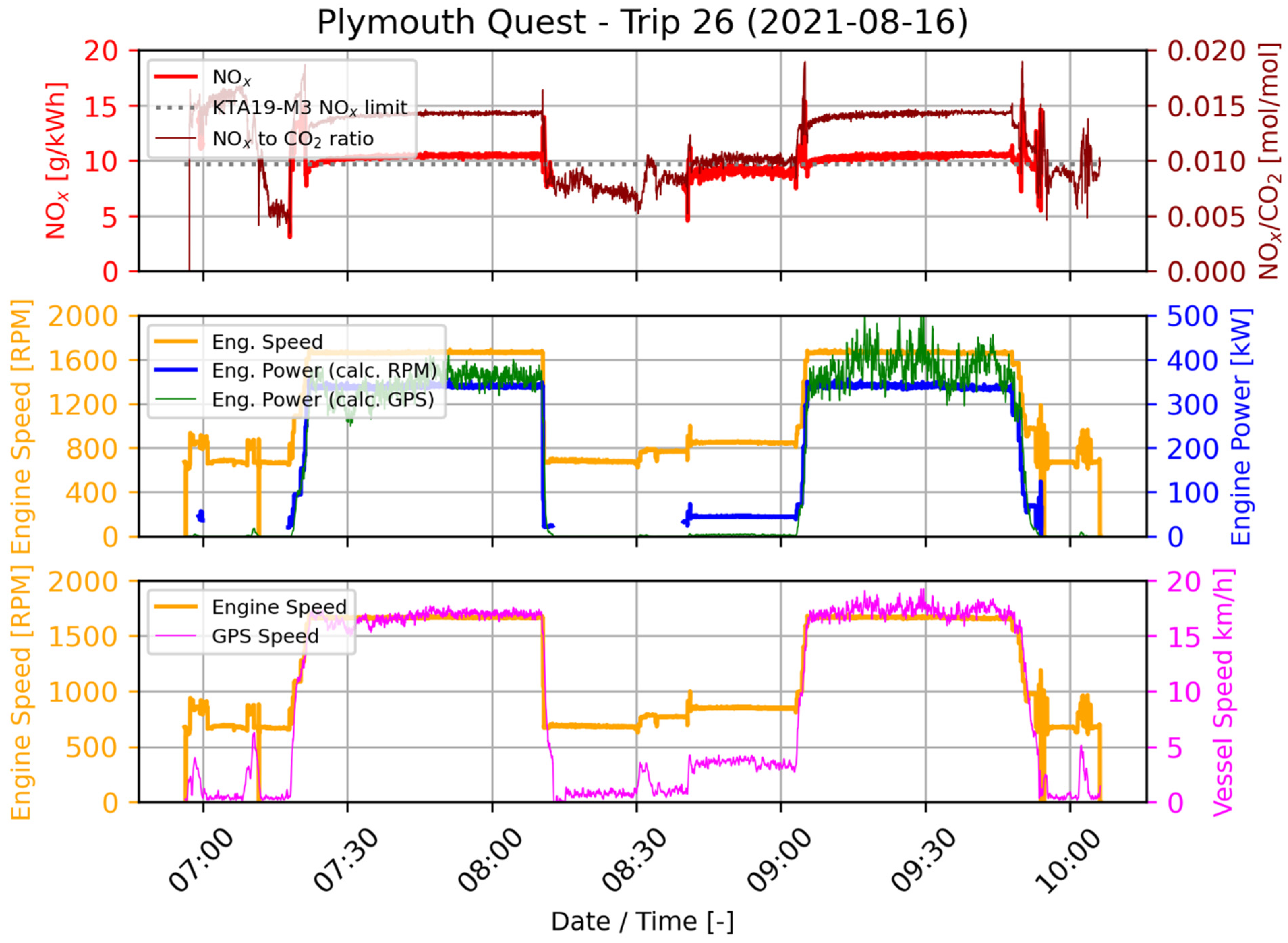
3.2. Trial 2: Plymouth (UK), May–August 2021
3.3. Trial 3: Kiel (DE)/Gothenburg (SE), 31 August–11 September 2021
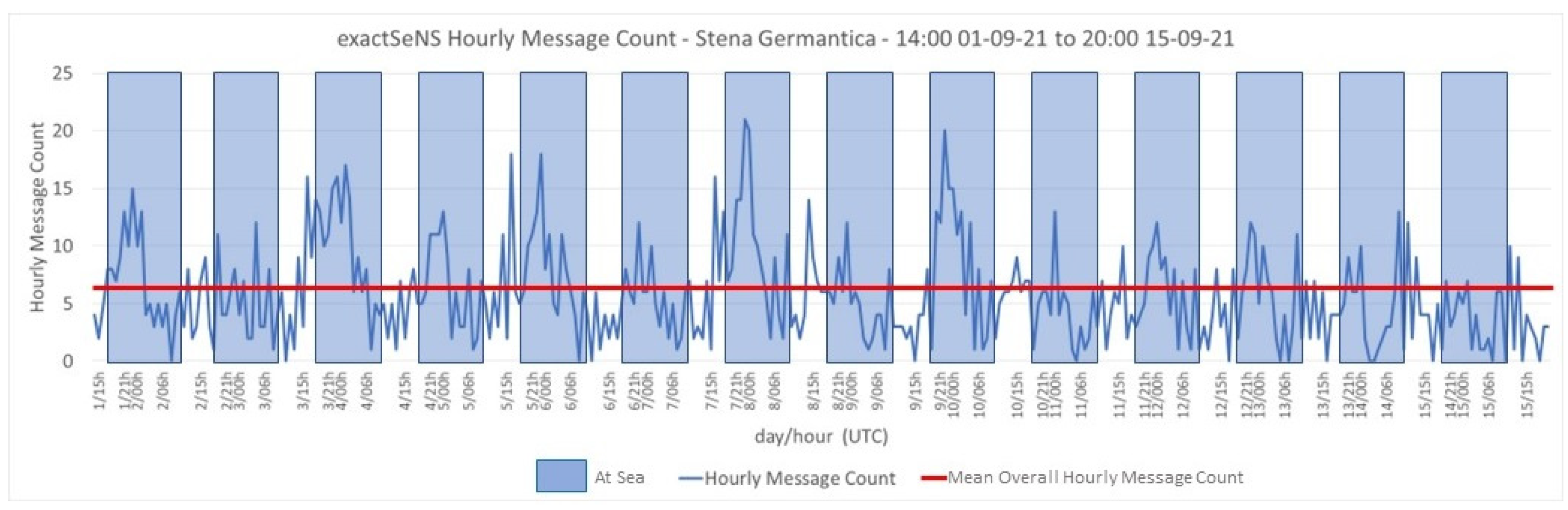
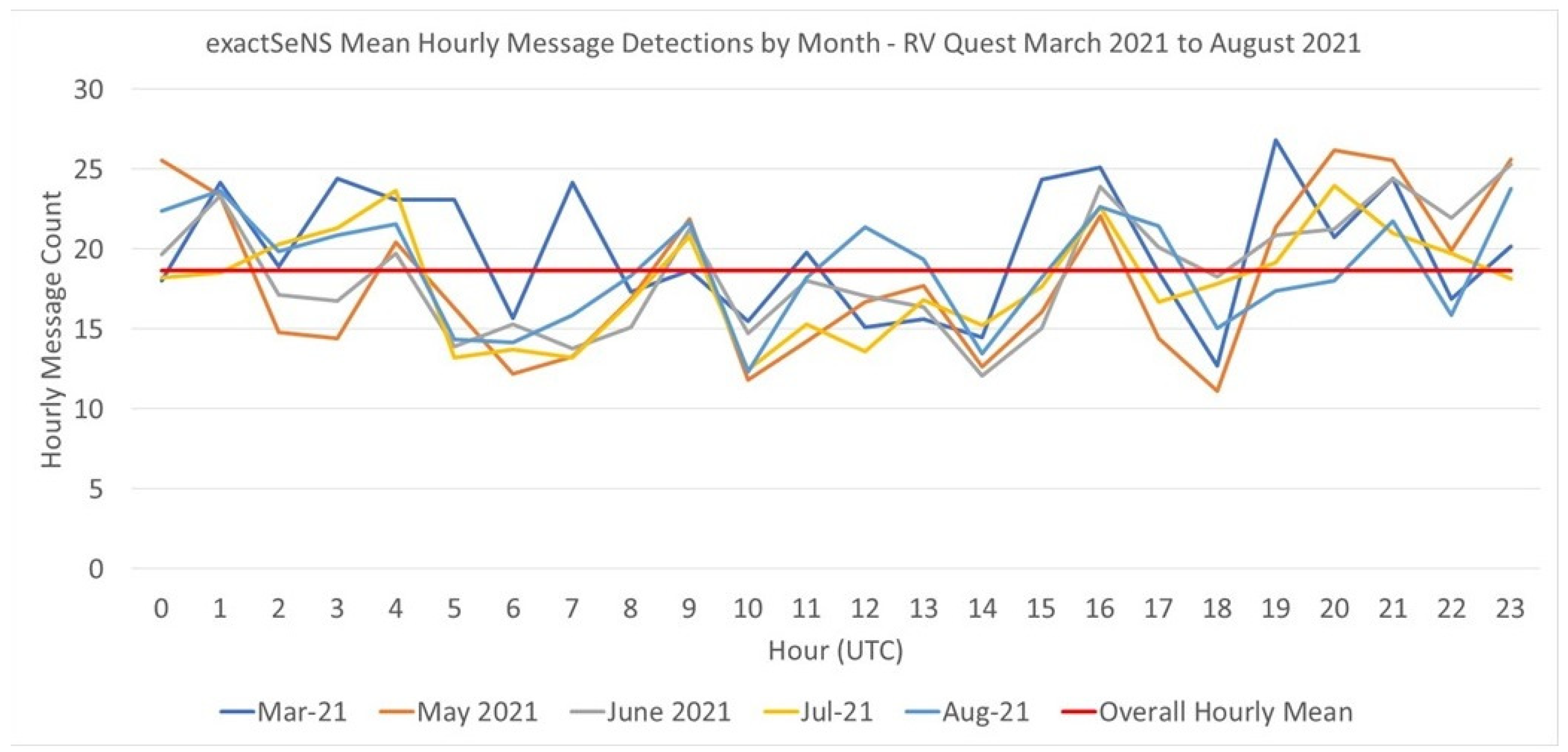
3.4. Trials 2 and 3: Message Retrieval Statistics
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Trial 1 AIS Binary Broadcast Message
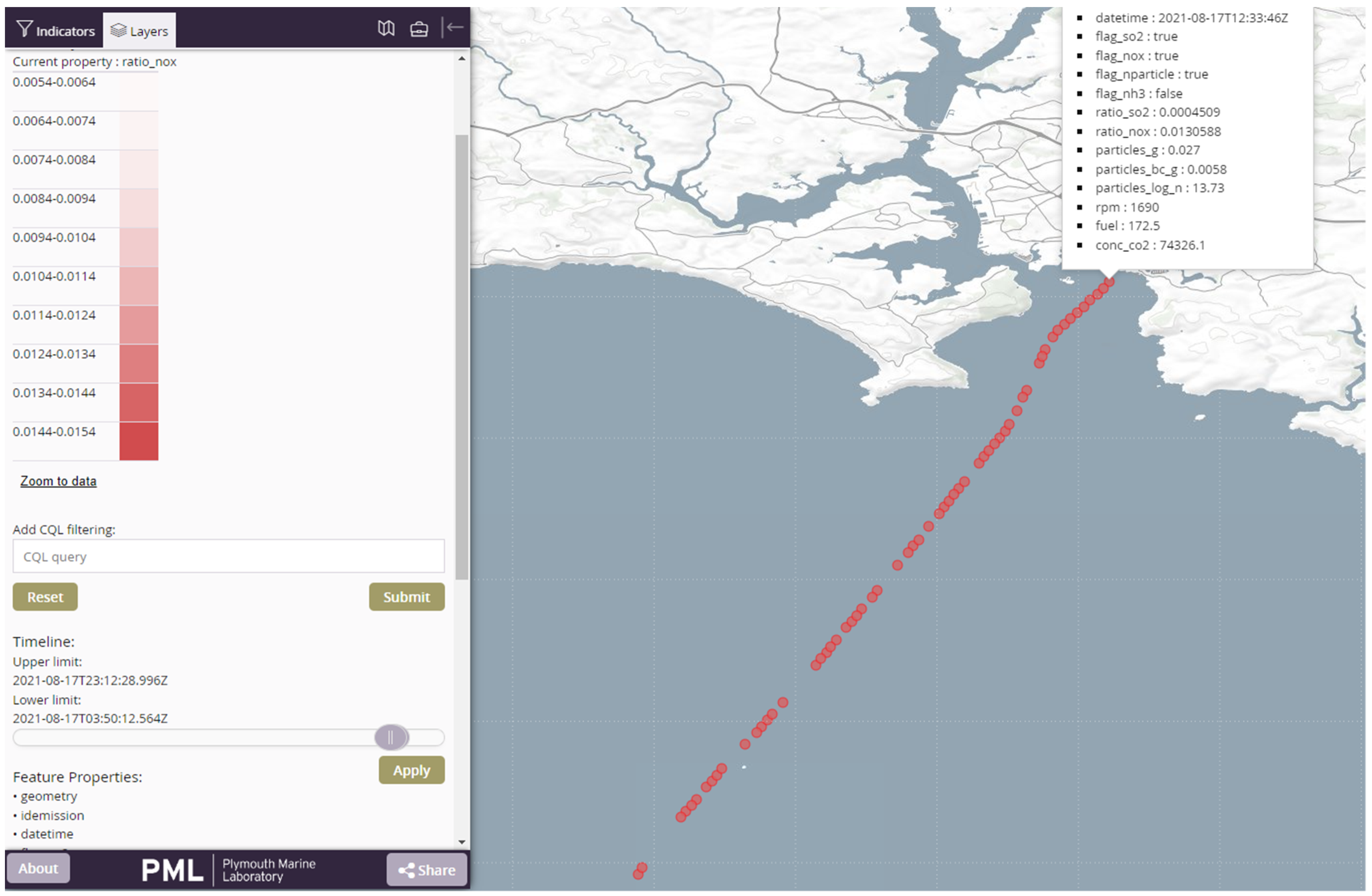
Appendix B. Trial 2 and Trial 3 AIS Single Slot Binary Message
- #2 bit Identifier
- #21 bit Latitude
- #22 bit Longitude
- #1 bit Flag SO2/CO2 threshold exceeded
- #1 bit Flag NOx/CO2 threshold exceeded
- #1 bit Flag Particles/CO2 threshold exceeded`
- #1 bit Flag NH3/CO2 threshold exceeded
- #8 bit SO2 ppm/CO2 ppm (range 0–0.05; precision 0.000196)
- #8 bit NOx ppm/CO2 ppm (range 0–0.255; precision 0.001)
- #8 bit Particles/CO2 g/kg (range 0–1; precision 0.0039)
- #8 bit BC/CO2 g/kg (range 0–0.3; precision 1.176 × 10−3)
- #4 bit Number of particles N/kg (CO2) (range 102–1018; precision—O magnitude)
- #9 bit engine speed rpm (range 0–2000; precision 3.91)
- #8 bit Fuel consumption kg/hr (0–2000; precision 7.81)
- #11 bit log10 CO2 concentration (400–100,000 ppm; precision 1.0 ppm)
References
- Chen, R.J.; Huang, W.; Wong, C.M.; Wang, Z.S.; Thach, T.Q.; Chen, B.H.; Kan, H.D.; Grp, C.C. Short-term exposure to sulfur dioxide and daily mortality in 17 Chinese cities: The China air pollution and health effects study (CAPES). Environ. Res. 2012, 118, 101–106. [Google Scholar] [CrossRef] [PubMed]
- Sunyer, J.; Atkinson, R.; Ballester, F.; Le Tertre, A.; Ayres, J.G.; Forastiere, F.; Forsberg, B.; Vonk, J.M.; Bisanti, L.; Anderson, R.H.; et al. Respiratory effects of sulphur dioxide: A hierarchical multicity analysis in the APHEA 2 study. Occup. Environ. Med. 2003, 60, e2. [Google Scholar] [CrossRef] [PubMed]
- Eyring, V.; Koehler, H.W.; van Aardenne, J.; Lauer, A. Emissions from international shipping: 1. The last 50 years. J. Geophys. Res. 2005, 110, 243–257. [Google Scholar] [CrossRef]
- Capaldo, K.; Corbett, J.J.; Kasibhatla, P.; Fischbeck, P.S.; Pandis, S.N. Effects of ship emissions on sulphur cycling and radiative climate forcing over the ocean. Nature 1999, 400, 743–746. [Google Scholar] [CrossRef]
- Dalsøren, S.B.; Eide, M.S.; Endresen, Ø.; Mjelde, A.; Gravir, G.; Isaksen, I.S.A. Update on emissions and environmental impacts from the international fleet of ships: The contribution from major ship types and ports. Atmos. Chem. Phys. 2009, 9, 2171–2194. [Google Scholar] [CrossRef]
- Corbett, J.J.; Winebrake, J.J.; Green, E.H.; Kasibhatla, P.; Eyring, V.; Lauer, A. Mortality from Ship Emissions: A Global Assessment. Environ. Sci. Technol. 2007, 41, 8512–8518. [Google Scholar] [CrossRef] [PubMed]
- Eyring, V.; Köhler, H.W.; Lauer, A.B.L. Emissions from international shipping: 2. Impact of future technologies on scenarios until 2050. J. Geophys. Res. 2005, 110, 1707–1724. [Google Scholar] [CrossRef]
- Lynch, J.A.; Bowersox, V.C.; Grimm, J.W. Changes in sulfate deposition in eastern USA following implementation of Phase I of Title IV of the Clean Air Act Amendments of 1990. Atmos. Environ. 2000, 34, 1665–1680. [Google Scholar] [CrossRef]
- Malm, W.C.; Schichtel, B.A.; Ames, R.B.; Gebhart, K.A. A 10-year spatial and temporal trend of sulfate across the United States. J. Geophys. Res. 2002, 107, 4627. [Google Scholar] [CrossRef]
- Vestreng, V.; Myhre, G.; Fagerli, H.; Reis, S.; Tarrasón, L. Twenty-five years of continuous sulphur dioxide emission reduction in Europe. Atmos. Chem. Phys. 2007, 7, 3663–3681. [Google Scholar] [CrossRef]
- Beecken, J.; Mellqvist, J.; Salo, K.; Ekholm, J.; Jalkanen, J.P. Airborne emission measurements of SO2, NOx and particles from individual ships using a sniffer technique. Atmos. Meas. Tech. 2014, 7, 1957–1968. [Google Scholar] [CrossRef]
- Berg, N.; Mellqvist, J.; Jalkanen, J.P.; Balzani, J. Ship emissions of SO2 and NO2: DOAS measurements from airborne platforms. Atmos. Meas. Tech. 2012, 5, 1085–1098. [Google Scholar] [CrossRef]
- Mellqvist, J.; Beecken, J.; Conde, V.; Ekholm, J. Surveillance of Sulfur Emissions from Ships in Danish Waters; Chalmers University of Technology: Göteborg, Sweden, 2017. [Google Scholar]
- Kurchaba, S.; van Vliet, J.; Verbeek, F.J.; Meulman, J.J.; Veenman, C.J. Supervised Segmentation of NO2 Plumes from Individual Ships Using TROPOMI Satellite Data. Remote Sens. 2022, 14, 809. [Google Scholar] [CrossRef]
- Yang, M.; Bell, T.G.; Hopkins, F.E.; Smyth, T.J. Attribution of atmospheric sulfur dioxide over the English Channel to dimethyl sulfide and changing ship emissions. Atmos. Chem. Phys. 2016, 16, 4771–4783. [Google Scholar] [CrossRef]
- Verbeek, R.; van Dinther, D.; Mamarik, S.; Grigoriadis, A.; Weigelt, A.; van Vliet, J.; Smyth, T.; Deakin, A.; Irjala, M. Cost-effectiveness of Different Approaches for Compliance Monitoring. SCIPPER Project D5.3. EU Horizon 2020 Project No. 814893. Available online: https://www.scipper-project.eu/library/ (accessed on 3 March 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial 1 | Plymouth (UK), 2 March 2017 |
|---|---|
| Concepts to prove | Successful transmission of real-time emissions data from ship to shore using AIS |
| Themes demonstrated | Faster, better |
| Trial 2 and Trial 3 | Plymouth (UK), May–August 2021 Kiel (DE)/Gothenburg (SE), 31 August–11 September 2021 |
|---|---|
| Concepts to prove | Successful transmission of real-time emissions data from a low-cost sensor package (SEMS); attribution of emissions to an individual vessel |
| Themes demonstrated | Faster, better, cheaper |
| Electrochemical NOx Sensor | |
| Measurement range | 0–1500 ppm |
| Accuracy | ±10 ppm (<100 ppm NOx); ±10% (100–500 ppm); ±15% (500–1500 ppm) |
| Temperature range | 200–800 °C |
| Response time NOx | 1.1–1.2 s |
| Response time O2 | 1 s |
| Accuracy O2 | ±2500 ppm (0–5% O2), ±5% (5–21%) |
| Electrochemical NH3 Sensor | |
| Measurement range | 0–100 ppm |
| Accuracy | ±5 ppm NH3 at 10 ppm NH3 |
| Temperature range | 200–450°C (functional), −40 °C to 700 °C (non-functional) |
| Response time | T60 = 3 s, T90 = 5 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smyth, T.; Deakin, A.; Pewter, J.; Snee, D.; Proud, R.; Verbeek, R.; Verhagen, V.; Paschinger, P.; Bell, T.; Fishwick, J.; et al. Faster, Better, Cheaper: Solutions to the Atmospheric Shipping Emission Compliance and Attribution Conundrum. Atmosphere 2023, 14, 500. https://doi.org/10.3390/atmos14030500
Smyth T, Deakin A, Pewter J, Snee D, Proud R, Verbeek R, Verhagen V, Paschinger P, Bell T, Fishwick J, et al. Faster, Better, Cheaper: Solutions to the Atmospheric Shipping Emission Compliance and Attribution Conundrum. Atmosphere. 2023; 14(3):500. https://doi.org/10.3390/atmos14030500
Chicago/Turabian StyleSmyth, Tim, Anthony Deakin, Jani Pewter, Darren Snee, Richard Proud, Ruud Verbeek, Vincent Verhagen, Pierre Paschinger, Thomas Bell, James Fishwick, and et al. 2023. "Faster, Better, Cheaper: Solutions to the Atmospheric Shipping Emission Compliance and Attribution Conundrum" Atmosphere 14, no. 3: 500. https://doi.org/10.3390/atmos14030500
APA StyleSmyth, T., Deakin, A., Pewter, J., Snee, D., Proud, R., Verbeek, R., Verhagen, V., Paschinger, P., Bell, T., Fishwick, J., & Yang, M. (2023). Faster, Better, Cheaper: Solutions to the Atmospheric Shipping Emission Compliance and Attribution Conundrum. Atmosphere, 14(3), 500. https://doi.org/10.3390/atmos14030500