
Volatile Organic Compound Sampling through Rotor Unmanned Aerial Vehicle Technique for Environmental Monitoring

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. The EMUAV Platform
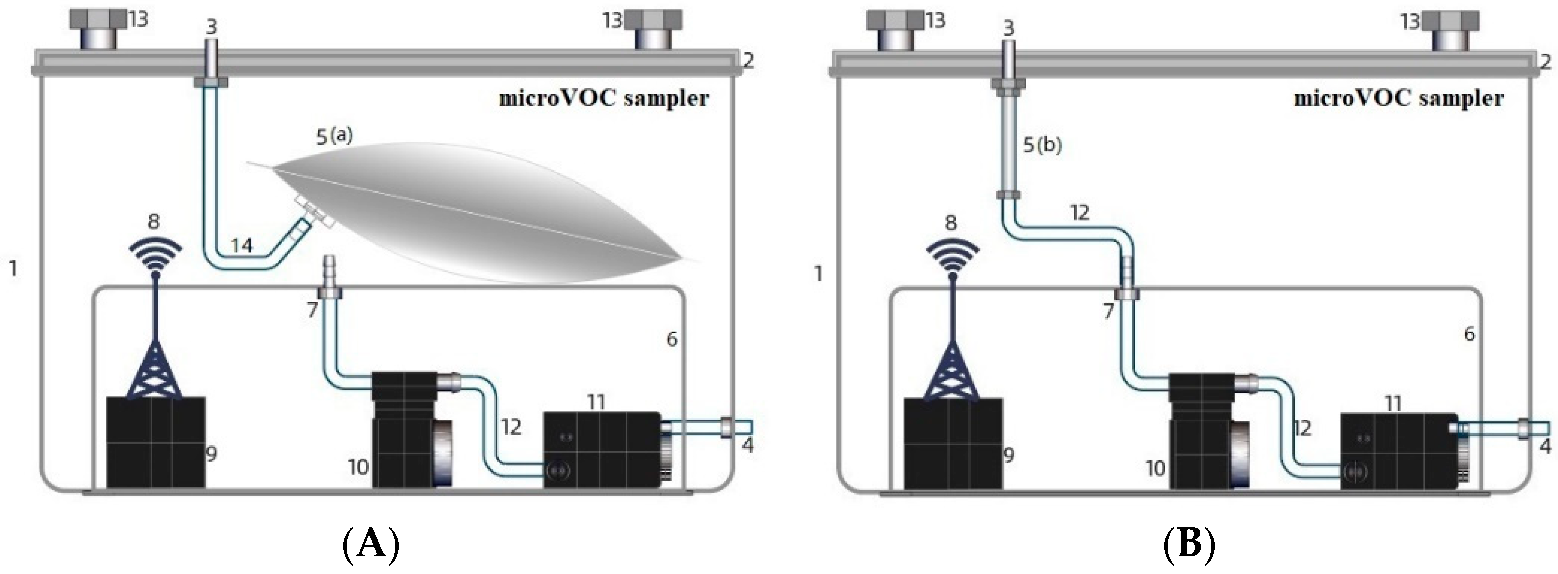
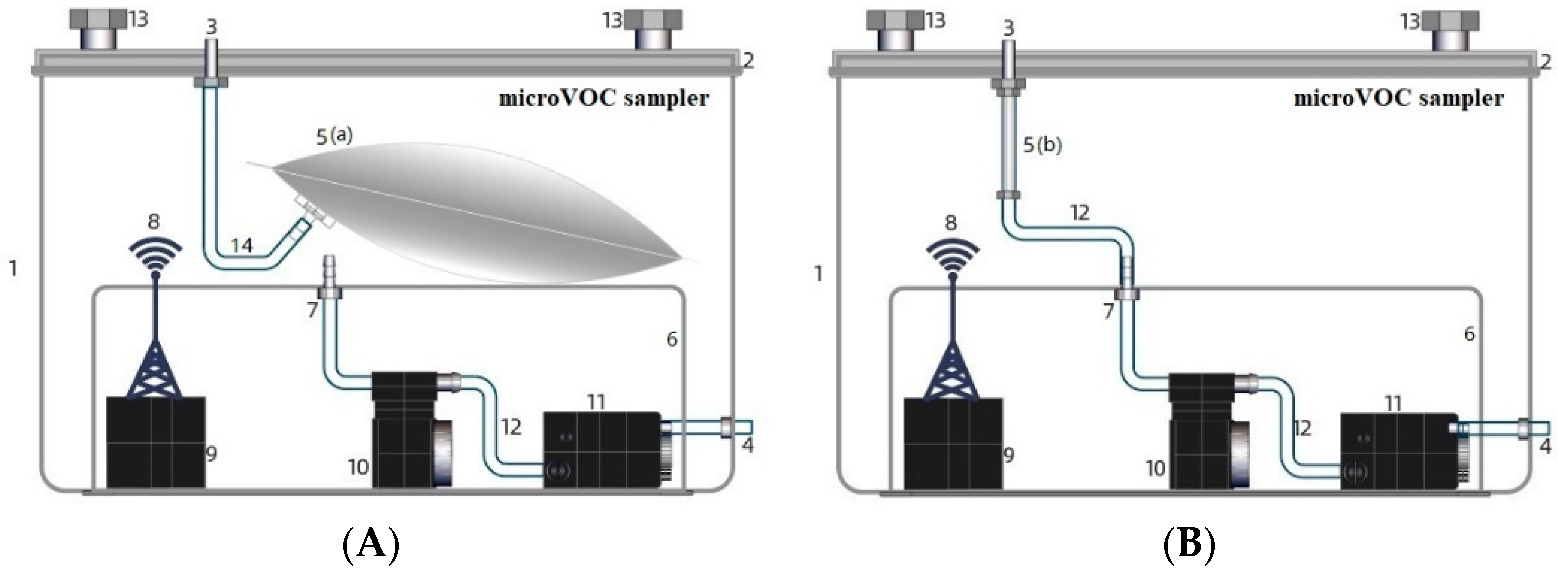
2.2. Equipment for VOC Monitoring and Sampling
2.3. VOC Sampling and Analysis
2.3.1. Airbag VOC Sampling and Analysis
2.3.2. Adsorption Tube VOC Sampling and Analysis
2.3.3. Calibration
3. Results and Discussion
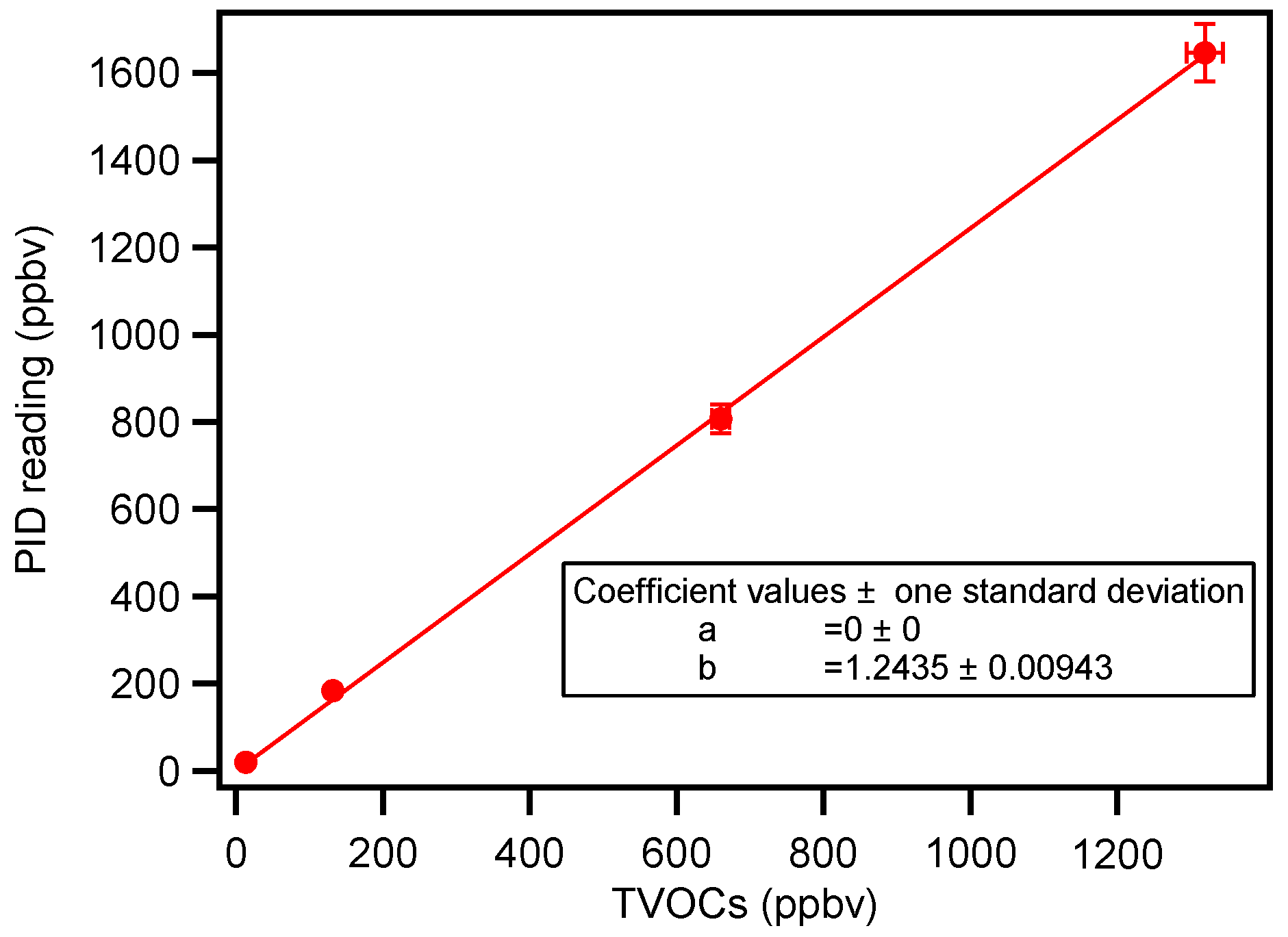
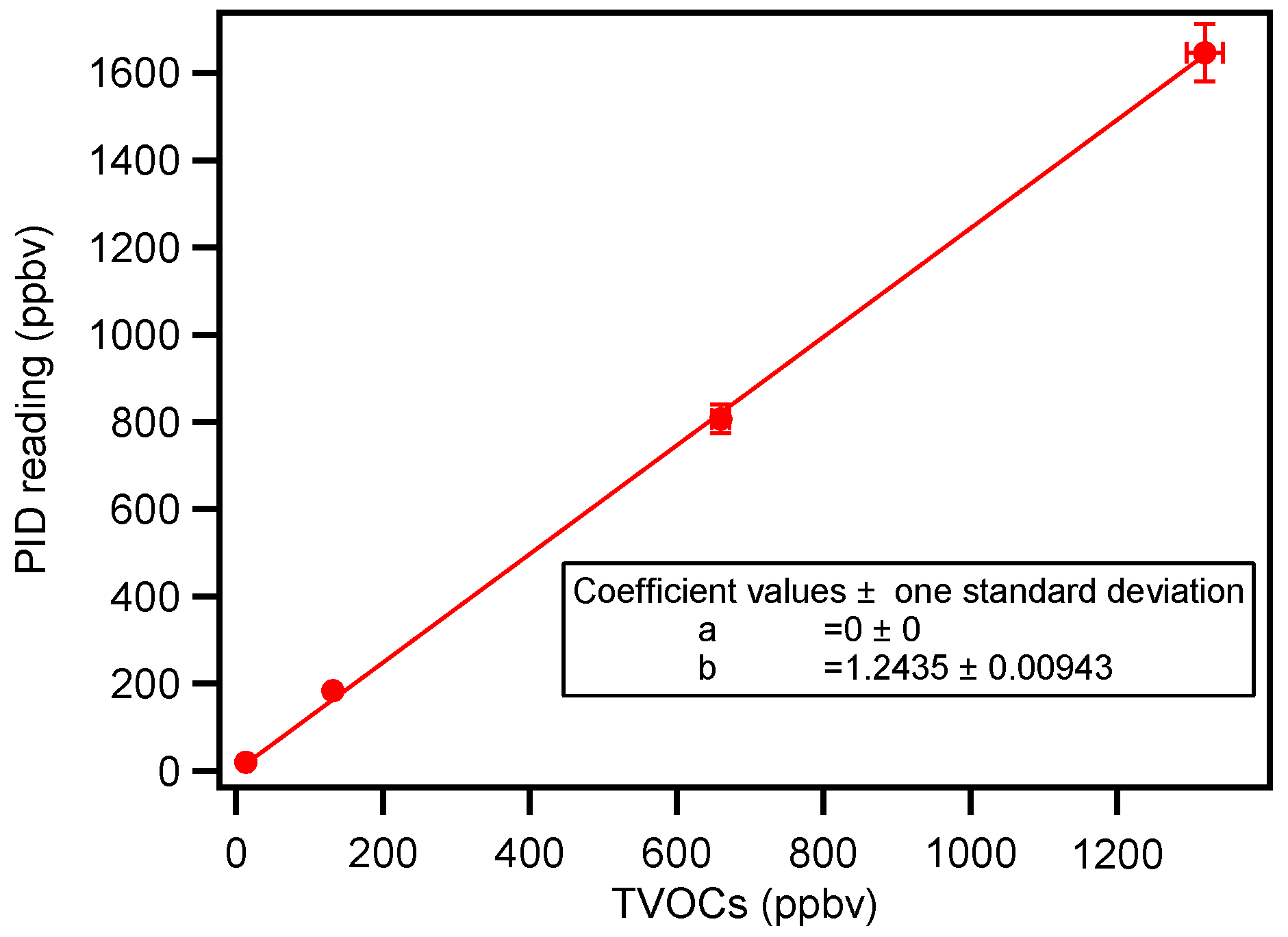
3.1. PID Accuracy
3.2. Accuracy of Sampling by microVOC Sampler on UAV
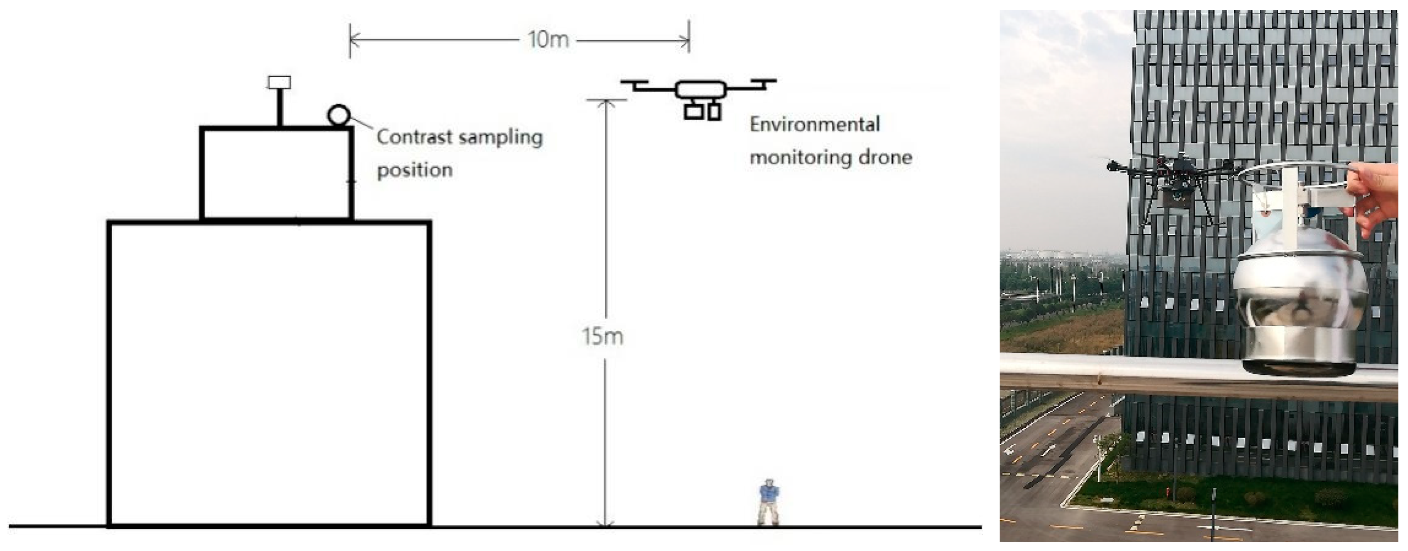
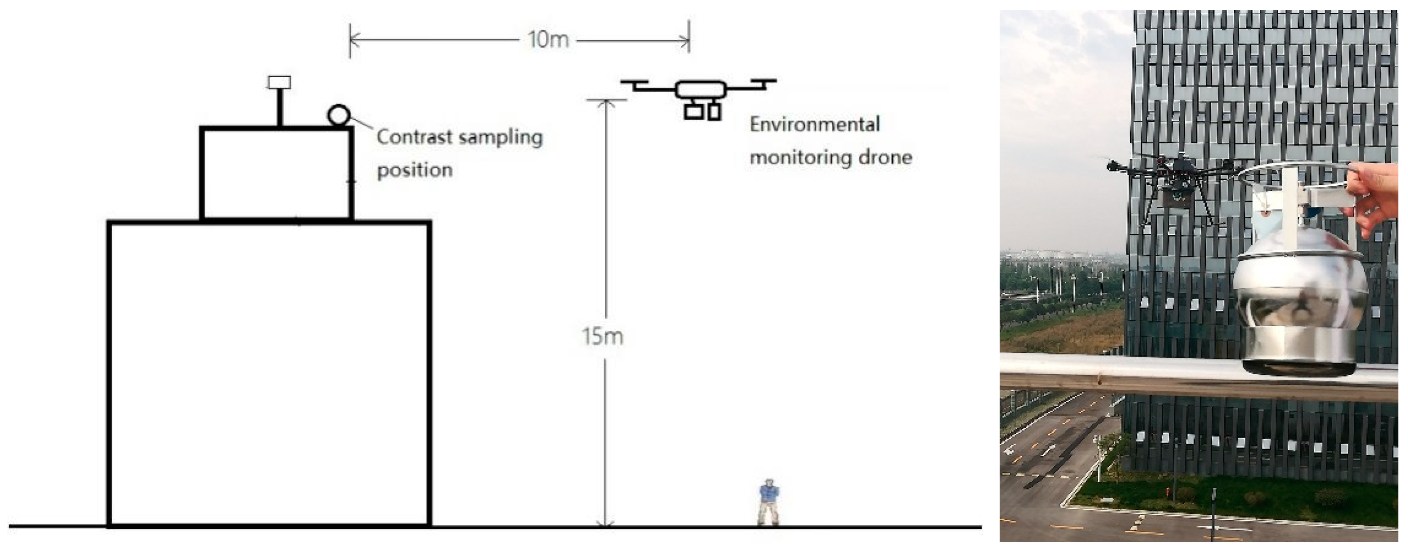
3.3. Representativeness of UAV Sampling
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, T.; Xue, L.; Brimblecombe, P.; Lam, Y.F.; Li, L.; Zhang, L. Ozone pollution in China: A review of concentrations, meteorological influences, chemical precursors, and effects. Sci. Total Environ. 2017, 575, 1582–1596. [Google Scholar] [CrossRef]
- Guo, H.; Ling, Z.H.; Cheng, H.R.; Simpson, I.J.; Lyu, X.P.; Wang, X.M.; Shao, M.; Lu, H.X.; Ayoko, G.; Zhang, Y.L.; et al. Tropospheric volatile organic compounds in China. Sci. Total Environ. 2017, 574, 1021–1043. [Google Scholar] [CrossRef]
- Xiong, C.; Wang, N.; Zhou, L.; Yang, F.; Qiu, Y.; Chen, J.; Han, L.; Li, J. Component characteristics and source apportionment of volatile organic compounds during summer and winter in downtown Chengdu, southwest China. Atmos. Environ. 2021, 258, 118485. [Google Scholar] [CrossRef]
- Hsu, C.-Y.; Chiang, H.-C.; Shie, R.-H.; Ku, C.-H.; Lin, T.-Y.; Chen, M.-J.; Chen, N.-T.; Chen, Y.-C. Ambient VOCs in residential areas near a large-scale petrochemical complex: Spatiotemporal variation, source apportionment and health risk. Environ. Pollut. 2018, 240, 95–104. [Google Scholar] [CrossRef]
- Huang, R.-J.; Zhang, Y.; Bozzetti, C.; Ho, K.-F.; Cao, J.-J.; Han, Y.; Daellenbach, K.R.; Slowik, J.G.; Platt, S.M.; Canonaco, F.; et al. High secondary aerosol contribution to particulate pollution during haze events in China. Nature 2014, 514, 218–222. [Google Scholar] [CrossRef] [PubMed]
- Jimenez, J.L.; Canagaratna, M.R.; Donahue, N.M.; Prevot, A.S.H.; Zhang, Q.; Kroll, J.H.; DeCarlo, P.F.; Allan, J.D.; Coe, H.; Ng, N.L.; et al. Evolution of Organic Aerosols in the Atmosphere. Science 2009, 326, 1525–1529. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Y.S.; Wu, F.K.; Tang, G.Q.; Wang, L.L.; Wang, Y.H.; Yang, Y. Vertical characteristics of VOCs in the lower troposphere over the North China Plain during pollution periods. Environ. Pollut. 2018, 236, 907–915. [Google Scholar] [CrossRef]
- Sangiorgi, G.; Ferrero, L.; Perrone, M.G.; Bolzacchini, E.; Duane, M.; Larsen, B.R. Vertical distribution of hydrocarbons in the low troposphere below and above the mixing height: Tethered balloon measurements in Milan, Italy. Environ. Pollut. 2011, 159, 3545–3552. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Zhou, L.; Fu, Q.Y.; Yan, L.; Bian, Q.G.; Wang, D.F.; Xiu, G.L. Vertical distribution of ozone over Shanghai during late spring: A balloon-borne observation. Atmos. Environ. 2019, 208, 48–60. [Google Scholar] [CrossRef]
- Xue, L.K.; Wang, T.; Simpson, I.J.; Ding, A.J.; Gao, J.; Blake, D.R.; Wang, X.Z.; Wang, W.X.; Lei, H.C.; Jing, D.Z. Vertical distributions of non-methane hydrocarbons and halocarbons in the lower troposphere over northeast China. Atmos. Environ. 2011, 45, 6501–6509. [Google Scholar] [CrossRef] [Green Version]
- Tan, Q.; Liu, H.; Xie, S.; Zhou, L.; Song, T.; Shi, G.; Jiang, W.; Yang, F.; Wei, F. Temporal and spatial distribution characteristics and source origins of volatile organic compounds in a megacity of Sichuan Basin, China. Environ. Res. 2020, 185, 109478. [Google Scholar] [CrossRef] [PubMed]
- Velasco, E.; Márquez, C.; Bueno, E.; Bernabé, R.M.; Sánchez, A.; Fentanes, O.; Wöhrnschimmel, H.; Cárdenas, B.; Kamilla, A.; Wakamatsu, S.; et al. Vertical distribution of ozone and VOCs in the low boundary layer of Mexico City. Atmos. Chem. Phys. 2008, 8, 3061–3079. [Google Scholar] [CrossRef]
- Mo, Z.; Huang, S.; Yuan, B.; Pei, C.; Song, Q.; Qi, J.; Wang, M.; Wang, B.; Wang, C.; Shao, M. Tower-based measurements of NMHCs and OVOCs in the Pearl River Delta: Vertical distribution, source analysis and chemical reactivity. Environ. Pollut. 2022, 292, 118454. [Google Scholar] [CrossRef]
- Geng, C.; Wang, J.; Yin, B.; Zhao, R.; Li, P.; Yang, W.; Xiao, Z.; Li, S.; Li, K.; Bai, Z. Vertical distribution of volatile organic compounds conducted by tethered balloon in the Beijing-Tianjin-Hebei region of China. J. Environ. Sci. 2020, 95, 121–129. [Google Scholar] [CrossRef]
- Ting, M.; Yue-Si, W.; Jie, J.; Fang-kun, W.; Mingxing, W. The vertical distributions of VOCs in the atmosphere of Beijing in autumn. Sci. Total Environ. 2008, 390, 97–108. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Xiu, G.; Zhou, L.; Bian, Q.; Duan, Y.; Fei, D.; Wang, D.; Fu, Q. Vertical distribution of volatile organic compounds within the lower troposphere in late spring of Shanghai. Atmos. Environ. 2018, 186, 150–157. [Google Scholar] [CrossRef]
- Liu, Z.; Li, X.; Yuan, B.; Mo, Z.; Tan, X.; Zhou, J.; Wang, S.; He, X.; Shao, M. Progress on the vertical observation methods of volatile organic compounds and their applications within the atmospheric boundary layer. Chin. Sci. Bull. 2021, 66, 4098–4111. [Google Scholar] [CrossRef]
- Zhou, X.; Aurell, J.; Mitchell, W.; Tabor, D.; Gullett, B. A small, lightweight multipollutant sensor system for ground-mobile and aerial emission sampling from open area sources. Atmos. Environ. 2017, 154, 31–41. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.-C.; Chang, C.-Y.; Wang, J.-L.; Pan, X.-X.; Chen, Y.-C.; Ho, Y.-J. An optimized multicopter UAV sounding technique (MUST) for probing comprehensive atmospheric variables. Chemosphere 2020, 254, 126867. [Google Scholar] [CrossRef] [PubMed]
- Fumian, F.; Di Giovanni, D.; Martellucci, L.; Rossi, R.; Gaudio, P. Application of Miniaturized Sensors to Unmanned Aerial Systems, A New Pathway for the Survey of Polluted Areas: Preliminary Results. Atmosphere 2020, 11, 471. [Google Scholar] [CrossRef]
- Li, X.-B.; Peng, Z.-R.; Wang, D.; Li, B.; Huangfu, Y.; Fan, G.; Wang, H.; Lou, S. Vertical distributions of boundary-layer ozone and fine aerosol particles during the emission control period of the G20 summit in Shanghai, China. Atmos. Pollut. Res. 2021, 12, 352–364. [Google Scholar] [CrossRef]
- Ma, Y.; Ye, J.; Ribeiro, I.O.; de Arellano, J.V.-G.; Xin, J.; Zhang, W.; Ferreira de Souza, R.A.; Martin, S.T. Optimization and Representativeness of Atmospheric Chemical Sampling by Hovering Unmanned Aerial Vehicles Over Tropical Forests. Earth Space Sci. 2021, 8, e2020EA001335. [Google Scholar] [CrossRef]
- Aurell, J.; Mitchell, W.; Chirayath, V.; Jonsson, J.; Tabor, D.; Gullett, B. Field determination of multipollutant, open area combustion source emission factors with a hexacopter unmanned aerial vehicle. Atmos. Environ. 2017, 166, 433–440. [Google Scholar] [CrossRef]
- Pang, X.; Chen, L.; Shi, K.; Wu, F.; Chen, J.; Fang, S.; Wang, J.; Xu, M. A lightweight low-cost and multipollutant sensor package for aerial observations of air pollutants in atmospheric boundary layer. Sci. Total Environ. 2021, 764, 142828. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.-C.; Wang, J.-L.; Chang, C.-Y.; Liang, M.-C.; Lin, M.-R. Development of a multicopter-carried whole air sampling apparatus and its applications in environmental studies. Chemosphere 2016, 144, 484–492. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.-C.; Chang, C.-Y.; Wang, J.-L.; Lin, M.-R.; Ou-Yang, C.-F.; Pan, H.-H.; Chen, Y.-C. A study of atmospheric mixing of trace gases by aerial sampling with a multi-rotor drone. Atmos. Environ. 2018, 184, 254–261. [Google Scholar] [CrossRef]
- Vo Thi Dieu, H.; Lin, C.; Vu Chi, T.; Nguyen Thi Kim, O.; Bui Xuan, T.; Weng, C.-E.; Yuan, C.-S.; Rene, E.R. An overview of the development of vertical sampling technologies for ambient volatile organic compounds (VOCs). J. Environ. Manag. 2019, 247, 401–412. [Google Scholar] [CrossRef]
- Lan, H.; Ruiz-Jimenez, J.; Leleev, Y.; Demaria, G.; Jussila, M.; Hartonen, K.; Riekkola, M.-L. Quantitative analysis and spatial and temporal distribution of volatile organic compounds in atmospheric air by utilizing drone with miniaturized samplers. Chemosphere 2021, 282, 131024. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Jing, S.; Zhou, M.; Lou, S.; Qu, K.; Qiu, W.; Wang, Q.; Li, S.; Gao, Y.; et al. Vertical Profiles of Volatile Organic Compounds in Suburban Shanghai. Adv. Atmos. Sci. 2021, 38, 1177–1187. [Google Scholar] [CrossRef]
- McKinney, K.A.; Wang, D.; Ye, J.; de Fouchier, J.B.; Guimarães, P.C.; Batista, C.E.; Souza, R.A.F.; Alves, E.G.; Gu, D.; Guenther, A.B.; et al. A sampler for atmospheric volatile organic compounds by copter unmanned aerial vehicles. Atmos. Meas. Tech. 2019, 12, 3123–3135. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Liu, B.; Ye, J.; Jia, T.; Khuzestani, R.B.; Jia Yin, S.; Cheng, X.; Zheng, Y.; Li, X.; Wu, C.; et al. Unmanned Aerial Vehicle Measurements of Volatile Organic Compounds over a Subtropical Forest in China and Implications for Emission Heterogeneity. ACS Earth Space Chem. 2021, 5, 247–256. [Google Scholar] [CrossRef]
- Simms, L.A.; Borras, E.; Chew, B.S.; Matsui, B.; McCartney, M.M.; Robinson, S.K.; Kenyon, N.; Davis, C.E. Environmental sampling of volatile organic compounds during the 2018 Camp Fire in Northern California. J. Environ. Sci. 2021, 103, 135–147. [Google Scholar] [CrossRef]
- Batista, C.E.; Ye, J.; Ribeiro, I.O.; Guimaraes, P.C.; Medeiros, A.S.S.; Barbosa, R.G.; Oliveira, R.L.; Duvoisin, S., Jr.; Jardine, K.J.; Gu, D.; et al. Intermediate-scale horizontal isoprene concentrations in the near-canopy forest atmosphere and implications for emission heterogeneity. Proc. Natl. Acad. Sci. USA 2019, 116, 19318–19323. [Google Scholar] [CrossRef] [PubMed]
- Jalali-Heravi, M.; Garkani-Nejad, Z. Prediction of relative response factors for flame ionization and photoionization detection using self-training artificial neural networks. J. Chromatogr. A 2002, 950, 183–194. [Google Scholar] [CrossRef]
- Zhi-Qiang, L.I.; Zhang, X.X.; Liu, L.; Zhou, Y.; Zhang, L.N.; Yue, W.U.; Bai, W.J.; Yu, M. Research on UAV Platform for Atmospheric Environmental Monitoring. Environ. Monit. Manag. Technol. 2017, 1, 69–72. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Parameters |
|---|---|
| Ultraviolet (UV) lamp energy | 10.6 Ev |
| Detection range | 1 ppbv–100 ppmv |
| Detection limit | 1 ppbv |
| Response time | 2 s |
| Operating temperature | −20 °C–50 °C |
| Operating humidity | 0–95% |
| ηnm (%) | Air Bag Method | Adsorption Tube Method | ||
|---|---|---|---|---|
| 20 °C Injection | 60 °C Injection | 80 °C Injection | ||
| 30~50 | Chlorotoluene, 1,3-dichlorobenzene, 1,2-dichlorobenzene, 1,4-dichlorobenzene, 1,2,4-trichlorobenzene, n-dodecane, naphthalene, hexachlorobutadiene, benzaldehyde, m-methylbenzaldehyde | 1,2,4-trichlorobenzene, naphthalene, m-methylbenzaldehyde | / | N-dodecane |
| 50~70 | Dibromochloromethane, 1,2-dibromoethane, chlorobenzene, tribromomethane, 1,1,2,2-tetrachloroethane, o-xylene, isopropyl benzene, n-propyl benzene, m-ethyltoluene, p-ethyltoluene, o-ethyltoluene, 1,3,5-trimethylbenzene, 1,2,4-trimethylbenzene, 1,2,3-trimethylbenzene, n-decane, m-diethylbenzene, p-diethylbenzene, n-undecane | Chlorotoluene, 1,3-dichlorobenzene, 1,2-dichlorobenzene, 1,4-dichlorobenzene, p-diethylbenzene, n-dodecane, hexachlorobutadiene | Chlorotoluene, 1,3-dichlorobenzene, 1,2-dichlorobenzene, 1,4-dichlorobenzene, 1,2,4-trichlorobenzene, n-dodecane, naphthalene, hexachlorobutadiene | undecane, m-methylbenzaldehyde, 1,2,4-trichlorobenzene |
| 70~130 | The remaining 87 components | The remaining 107 components | The remaining 108 components | The remaining 110 components |
| 130~160 | Acetone, carbon tetrachloride, 1-hexene | 1-hexene | 1-hexene, 2-hexanone | / |
| NO. | Chemical Name | Air Bag | Adsorption Tube | NO. | Chemical Name | Air Bag | Adsorption Tube | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Lateral | Top | Lateral | Top | Lateral | Top | Lateral | Top | ||||
| 1 | Ethane | 60 | 3-methylhexane | ||||||||
| 2 | Ethylene | 61 | benzene | ||||||||
| 3 | Acetylene | 62 | 1,2-dichloroethane | ||||||||
| 4 | Propane | 63 | 2,2,4-trimethylpentane | ||||||||
| 5 | Propylene | 64 | N-heptane | ||||||||
| 6 | Difluorodichloromethane | 65 | Crotonaldehyde | ||||||||
| 7 | tetrafluorodichloroethane | 66 | Trichloroethylene | ||||||||
| 8 | Isobutane | 67 | 1,2-dichloropropane | ||||||||
| 9 | Methyl chloride | 68 | Amyl aldehyde | ||||||||
| 10 | 1-butylene | 69 | Methylcyclohexane | ||||||||
| 11 | N-butane | 70 | Methyl methacrylate | ||||||||
| 12 | Vinyl chloride | 71 | 1,4-dioxane | ||||||||
| 13 | 1,3-butadiene | 72 | Monobromodichloromethane | ||||||||
| 14 | Trans-but-2-ene | 73 | 2,3,4-trimethylpentane | ||||||||
| 15 | acetaldehyde | 74 | 2-methylheptane | ||||||||
| 16 | cis-but-2-ene | 75 | Cis-1, 3-dichloro-1-propene | ||||||||
| 17 | Methyl bromide | 76 | 3-methylheptane | ||||||||
| 18 | chloroethane | 77 | 1,1-dibromoethane | ||||||||
| 19 | isopentane | 78 | 4-methyl-2-pentanone | ||||||||
| 20 | Trichlorofluoromethane | 79 | Toluene | ||||||||
| 21 | 1-amylene | 80 | Isoctane | ||||||||
| 22 | Ispentane | 81 | Tran-1,3-dichloro-1-propene | ||||||||
| 23 | Ethanol | 82 | 1,1,2-trichloroethane | ||||||||
| 24 | Tr-2-pentene | 83 | tetrachloroethylene | ||||||||
| 25 | isoprene | 84 | 2-hexanone | ||||||||
| 26 | cis-2-pentene | 85 | hexanal | ||||||||
| 27 | acrolein | 86 | Dibromochloromethane | ||||||||
| 28 | propanal | 87 | 1,2-dibromoethane | ||||||||
| 29 | 1,1-dichloroethylene | 88 | Chlorobenzene | ||||||||
| 30 | Trifluorotrichloroethane | 89 | Ethyl benzene | ||||||||
| 31 | 2,2-dimethylbutane | 90, 91 | m&p-xylene | ||||||||
| 32 | acetone | 92 | N-nonane | ||||||||
| 33 | Carbon disulfide | 93 | o-xylene | ||||||||
| 34 | Isopropyl alcohol | 94 | Styrene | ||||||||
| 35 | Methylene chloride | 95 | Bromoform | ||||||||
| 36 | 2,3-Dimethylbutane | 96 | Isopropyl benzene | ||||||||
| 37 | 2-methylpentane | 97 | tetrachloroethane | ||||||||
| 38 | cyclopentane | 98 | Normal propyl benzene | ||||||||
| 39 | Tra-1,2-dichloroethylene | 99 | Para-ethyl toluene | ||||||||
| 40 | Methyl tert-butyl ether | 100 | M-ethyl toluene | ||||||||
| 41 | 3-methylpentane | 101 | 1,3,5-trimethylbenzene | ||||||||
| 42 | 1-hexene | 102 | N-decane | ||||||||
| 43 | n-hexane | 103 | O-ethyl toluene | ||||||||
| 44 | Methylacrolein | 104 | 1,2,4-trimethylbenzene | ||||||||
| 45 | 1,1-dichloroethane | 105 | Benzaldehyde | ||||||||
| 46 | Vinyl acetate | 106 | 1,3-dichlorobenzene | ||||||||
| 47 | 2,4-dimethylpentane | 107 | 1,4-dichlorobenzene | ||||||||
| 48 | N-butyl aldehyde | 108 | 1,2,3-trimethylbenzene | ||||||||
| 49 | Methylcyclopentane | 109 | Chlorinated toluene | ||||||||
| 50 | Cis-1,2-dichloroethylene | 110 | M-diethylbenzene | ||||||||
| 51 | 2-butanone | 111 | P-diethylbenzene | ||||||||
| 52 | Ethyl acetate | 112 | 1,2-dichlorobenzene | ||||||||
| 53 | tetrahydrofuran | 113 | N-undecane | ||||||||
| 54 | chloroform | 114 | M-methylbenzaldehyde | ||||||||
| 55 | 1,1,1 trichloroethane | 115 | N-dodecane | ||||||||
| 56 | 2-methylhexane | 116 | 1,2,4- trichlorobenzene | ||||||||
| 57 | Cyclohexane | 117 | Hexachlorobutadiene | ||||||||
| 58 | 2,3-dimethylpentane | 118 | Naphthalene | ||||||||
| 59 | Carbon tetrachloride | ||||||||||
 the component could not be analyzed or the results were difficult to accurately quantify and the data were not used;
the component could not be analyzed or the results were difficult to accurately quantify and the data were not used;  there was no significant difference between the two data groups, and the correlation coefficient was R > 0.5;
there was no significant difference between the two data groups, and the correlation coefficient was R > 0.5;  there was no significant difference between the two data groups, but the correlation coefficient was R ≤ 0.5;
there was no significant difference between the two data groups, but the correlation coefficient was R ≤ 0.5;  there was a significant difference between the two data groups, but the correlation coefficient was R > 0.5;
there was a significant difference between the two data groups, but the correlation coefficient was R > 0.5;  indicates that there was a significant difference between the two data groups, and the correlation coefficient was R ≤ 0.5.
indicates that there was a significant difference between the two data groups, and the correlation coefficient was R ≤ 0.5.Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhang, X.; Wu, X.; Li, J.; Qiu, Y.; Wang, H.; Cheng, Z.; Zheng, C.; Yang, F. Volatile Organic Compound Sampling through Rotor Unmanned Aerial Vehicle Technique for Environmental Monitoring. Atmosphere 2022, 13, 1442. https://doi.org/10.3390/atmos13091442
Chen Y, Zhang X, Wu X, Li J, Qiu Y, Wang H, Cheng Z, Zheng C, Yang F. Volatile Organic Compound Sampling through Rotor Unmanned Aerial Vehicle Technique for Environmental Monitoring. Atmosphere. 2022; 13(9):1442. https://doi.org/10.3390/atmos13091442
Chicago/Turabian StyleChen, Yong, Xiaoxu Zhang, Xiaofeng Wu, Jia Li, Yang Qiu, Hao Wang, Zhang Cheng, Chengbin Zheng, and Fumo Yang. 2022. "Volatile Organic Compound Sampling through Rotor Unmanned Aerial Vehicle Technique for Environmental Monitoring" Atmosphere 13, no. 9: 1442. https://doi.org/10.3390/atmos13091442
APA StyleChen, Y., Zhang, X., Wu, X., Li, J., Qiu, Y., Wang, H., Cheng, Z., Zheng, C., & Yang, F. (2022). Volatile Organic Compound Sampling through Rotor Unmanned Aerial Vehicle Technique for Environmental Monitoring. Atmosphere, 13(9), 1442. https://doi.org/10.3390/atmos13091442