
Improving the Performance of Pipeline Leak Detection Algorithms for the Mobile Monitoring of Methane Leaks



Abstract
:1. Introduction
1.1. Significance of Methane Leaks from Natural Gas Infrastructure
1.2. Leak Detection Methods
1.3. Study Objectives
2. Methods
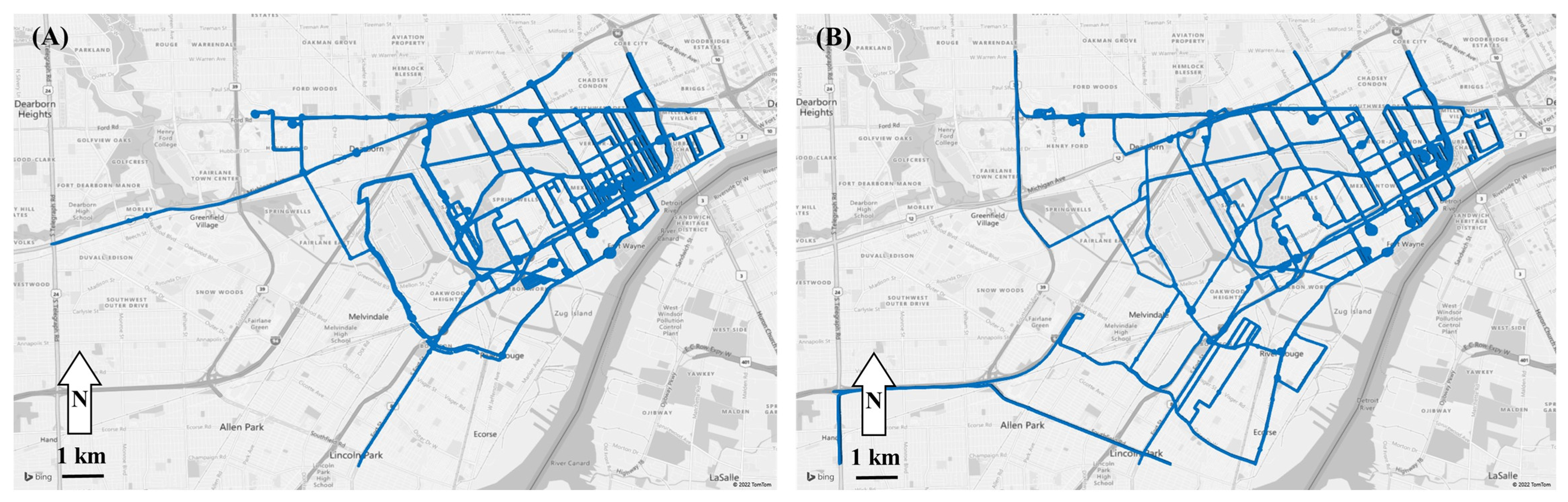
2.1. Study Site and Sampling Schedule
2.2. Measurements and Quality Assurance
2.3. Data Analysis
2.3.1. Initial Data Processing
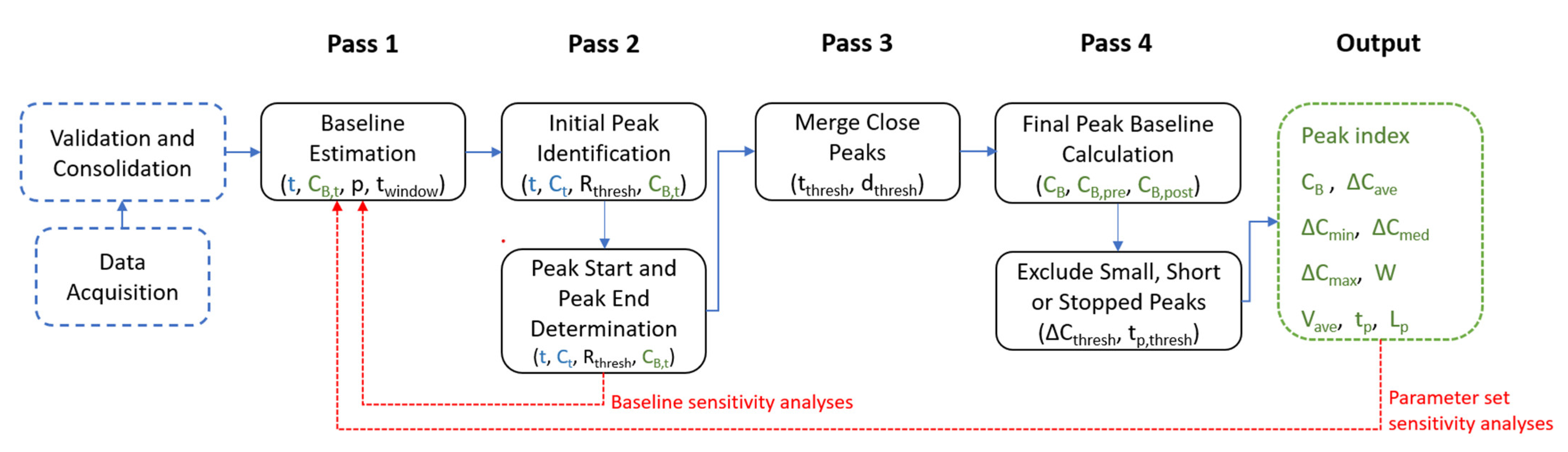
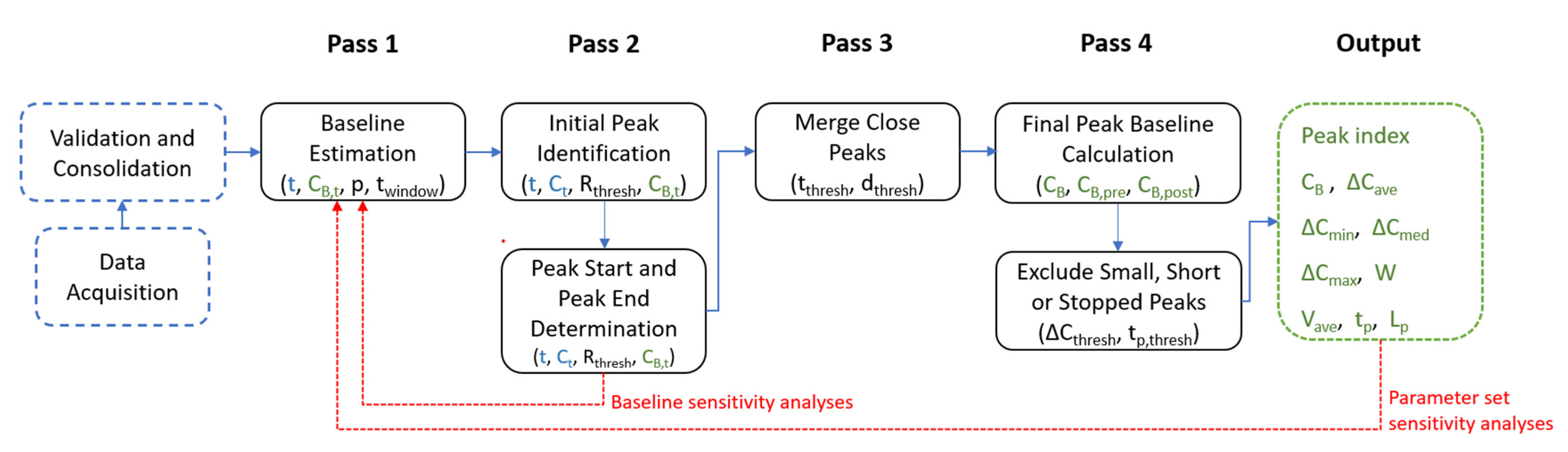
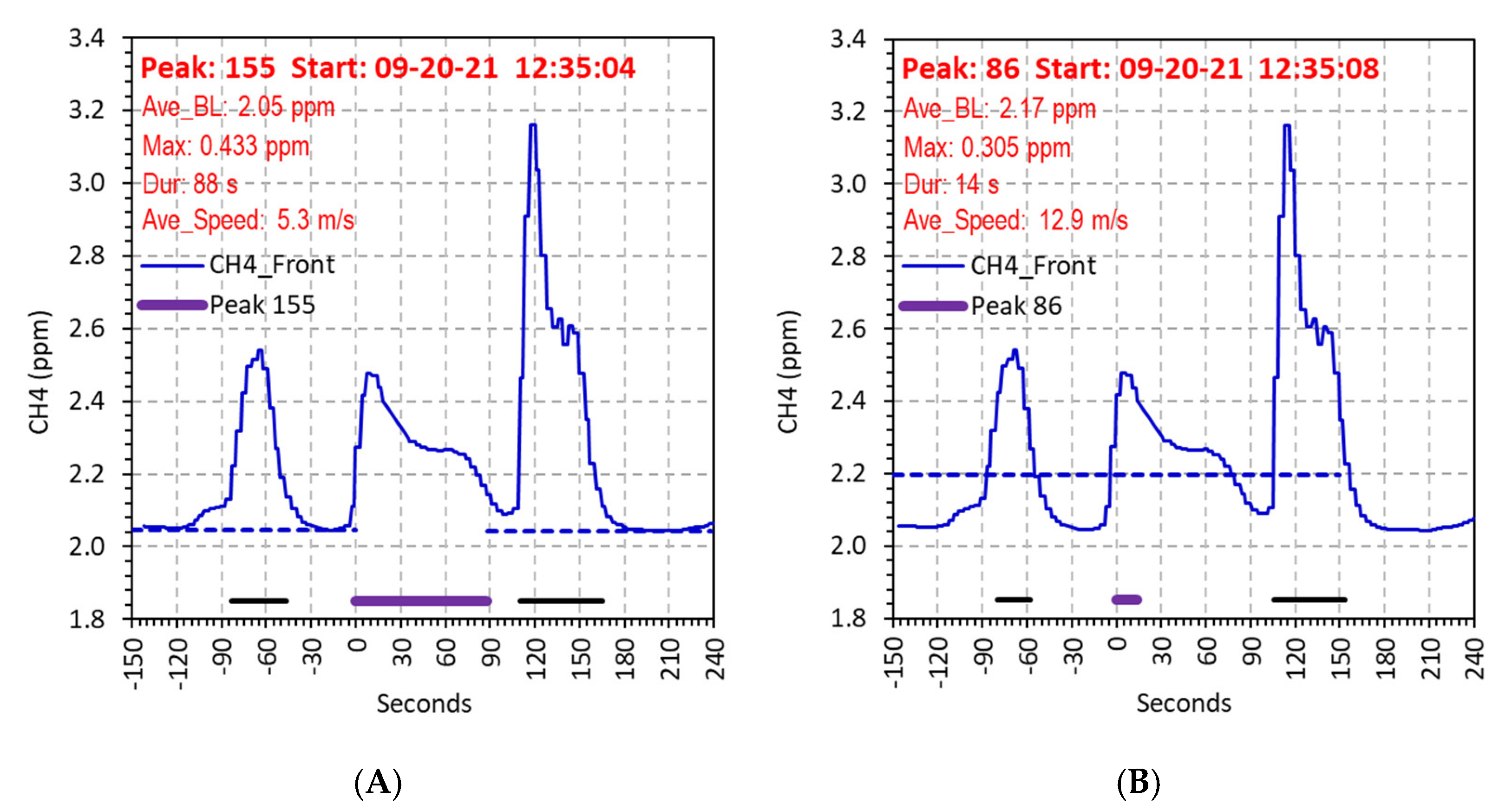
2.3.2. Baseline and Peak Detection Algorithm
2.3.3. Sensitivity Analysis
2.3.4. Data Mapping and Visualization
2.3.5. Comparison to Other Peak Detection Algorithms
3. Results and Discussion
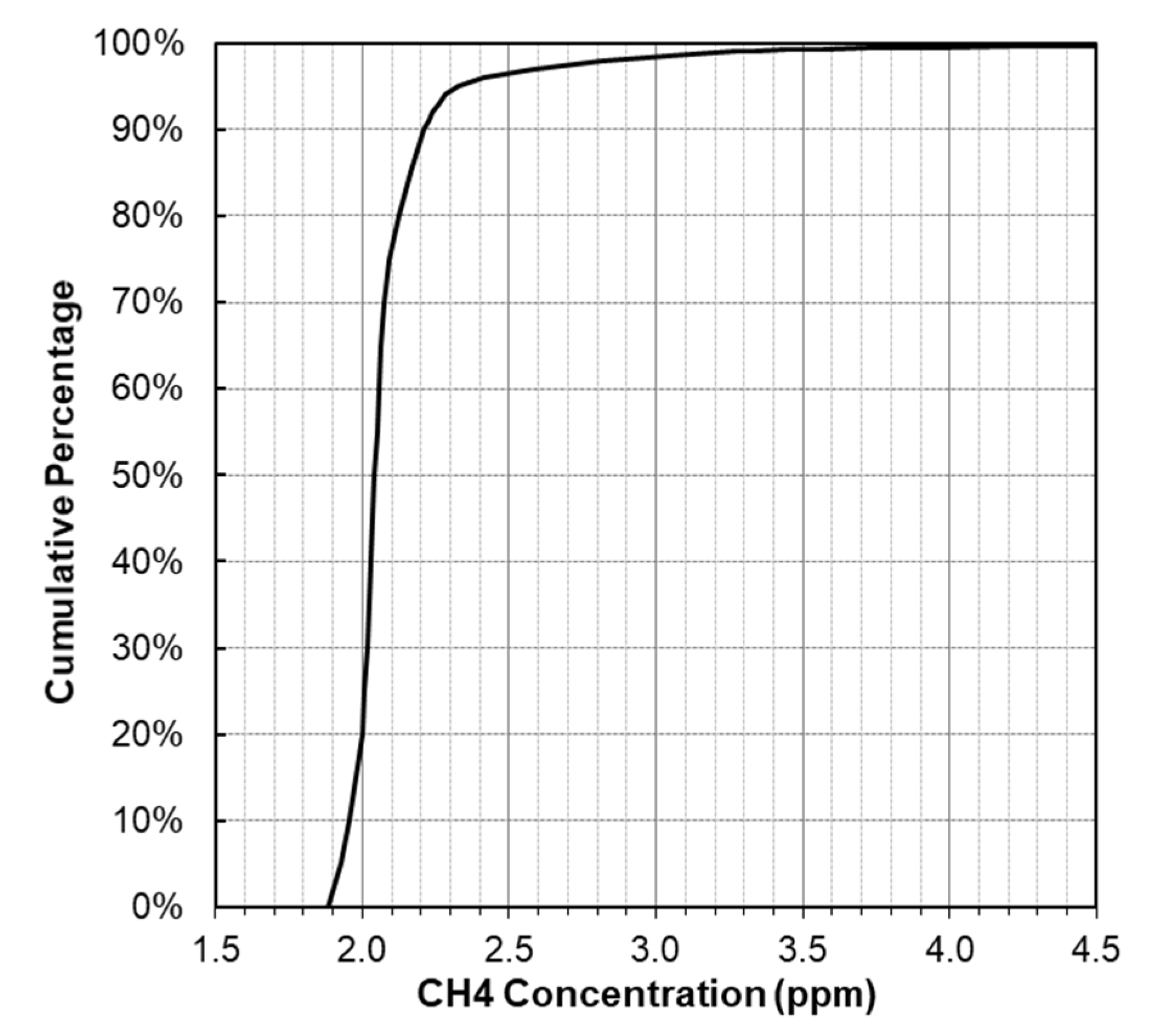
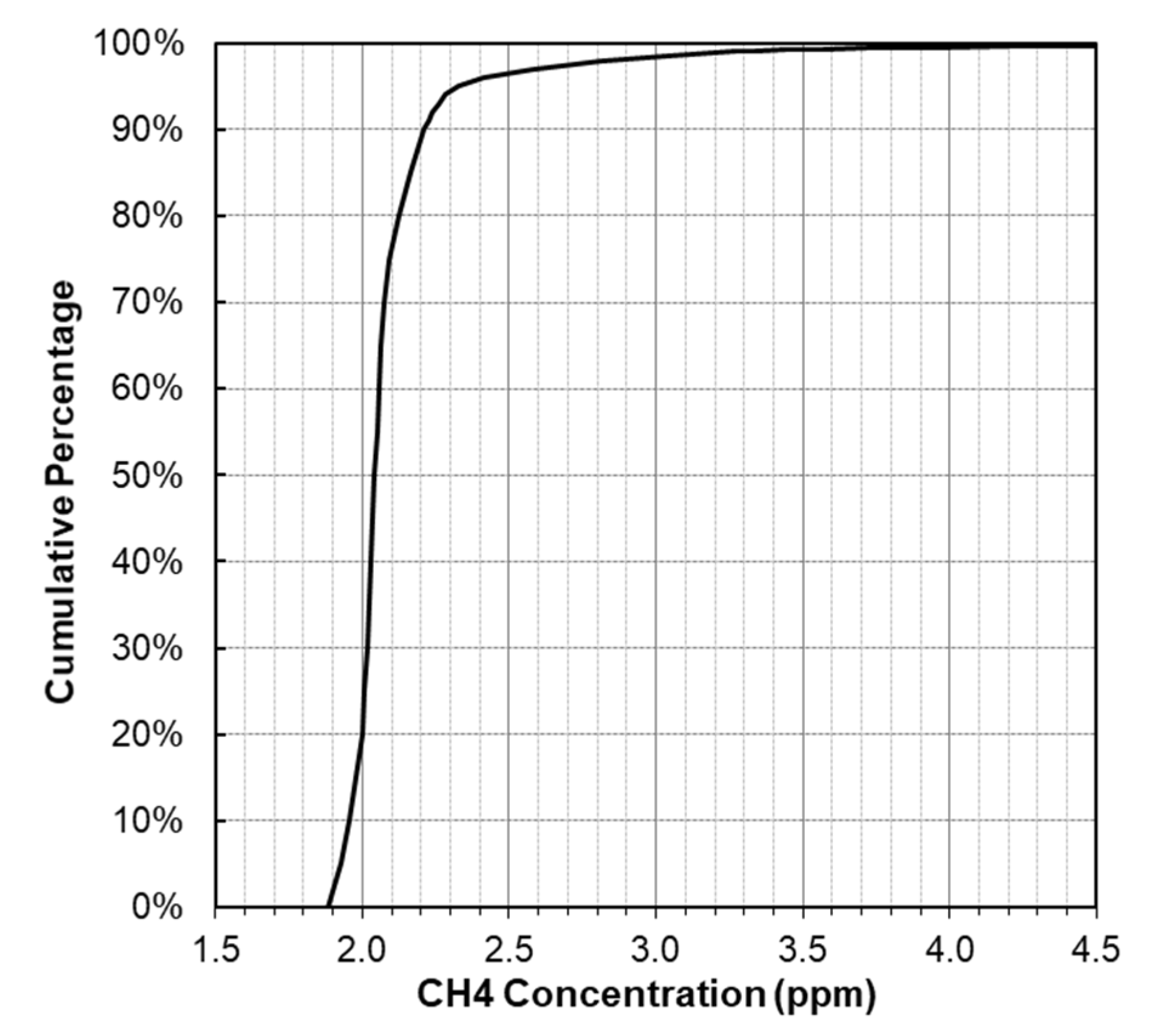
3.1. Data Summary
3.2. Sensitivity Analyses
3.2.1. Baseline and Initial Peak Finding
3.2.2. Peak Merge and Final Filtering
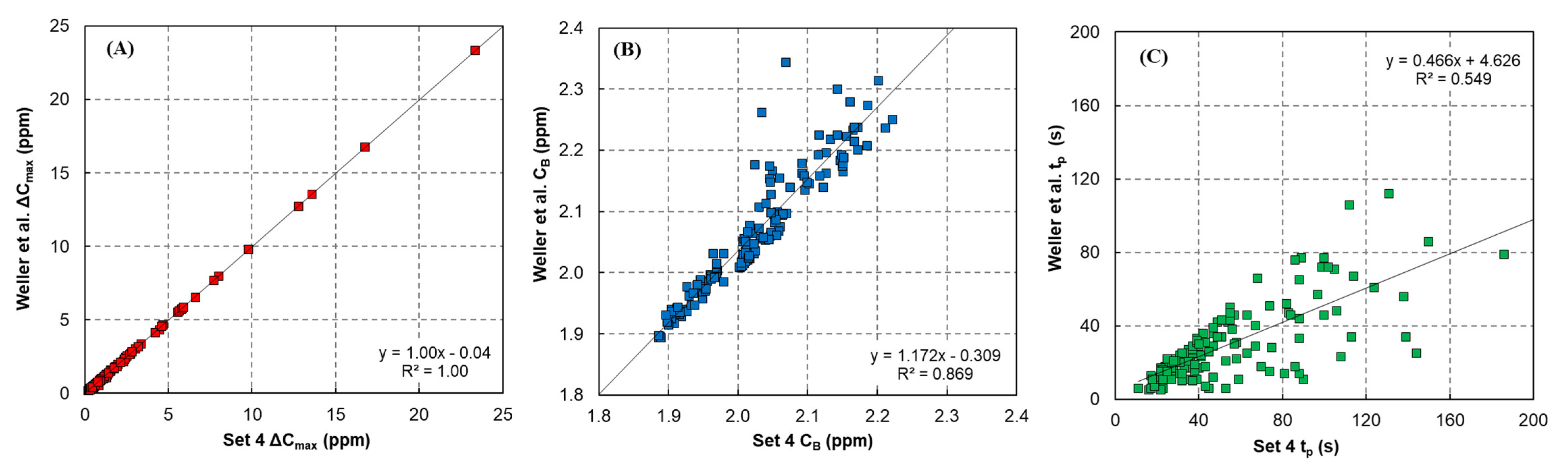
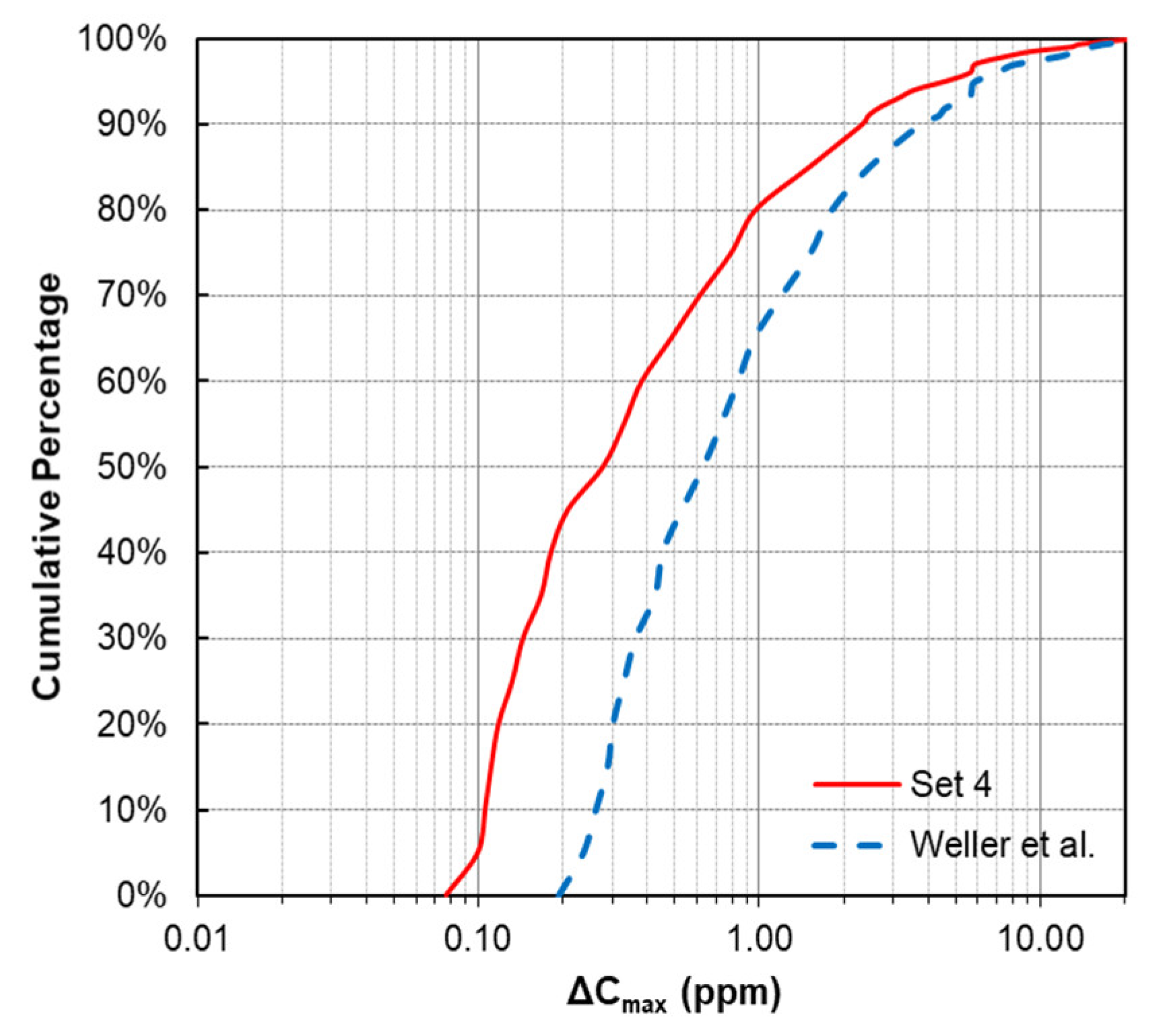
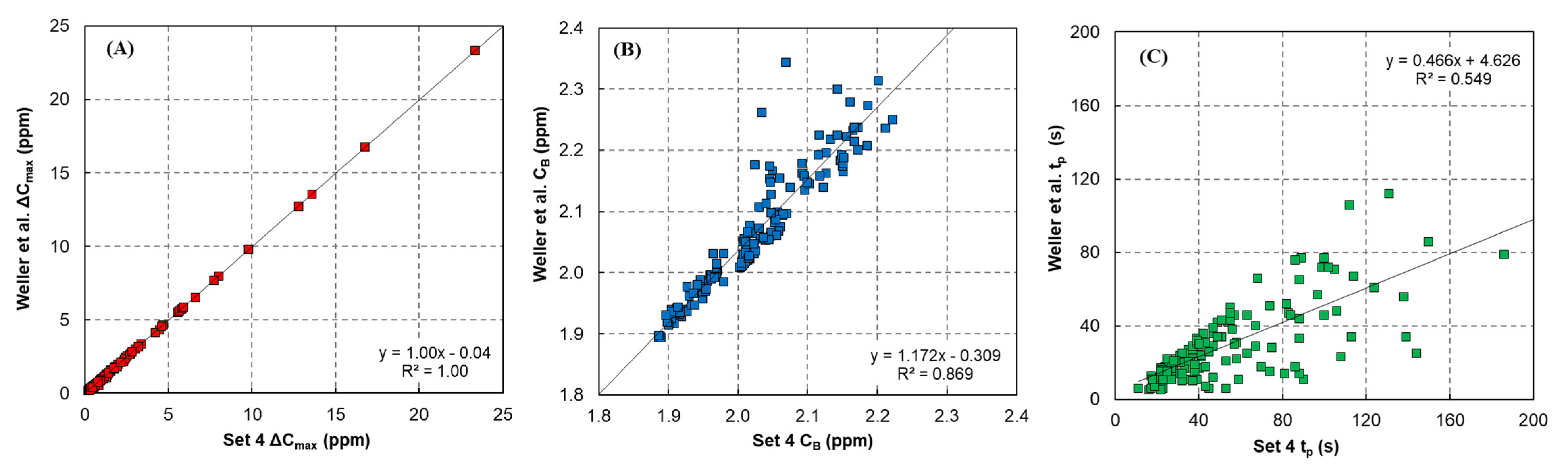
3.3. Comparison to Other Algorithms
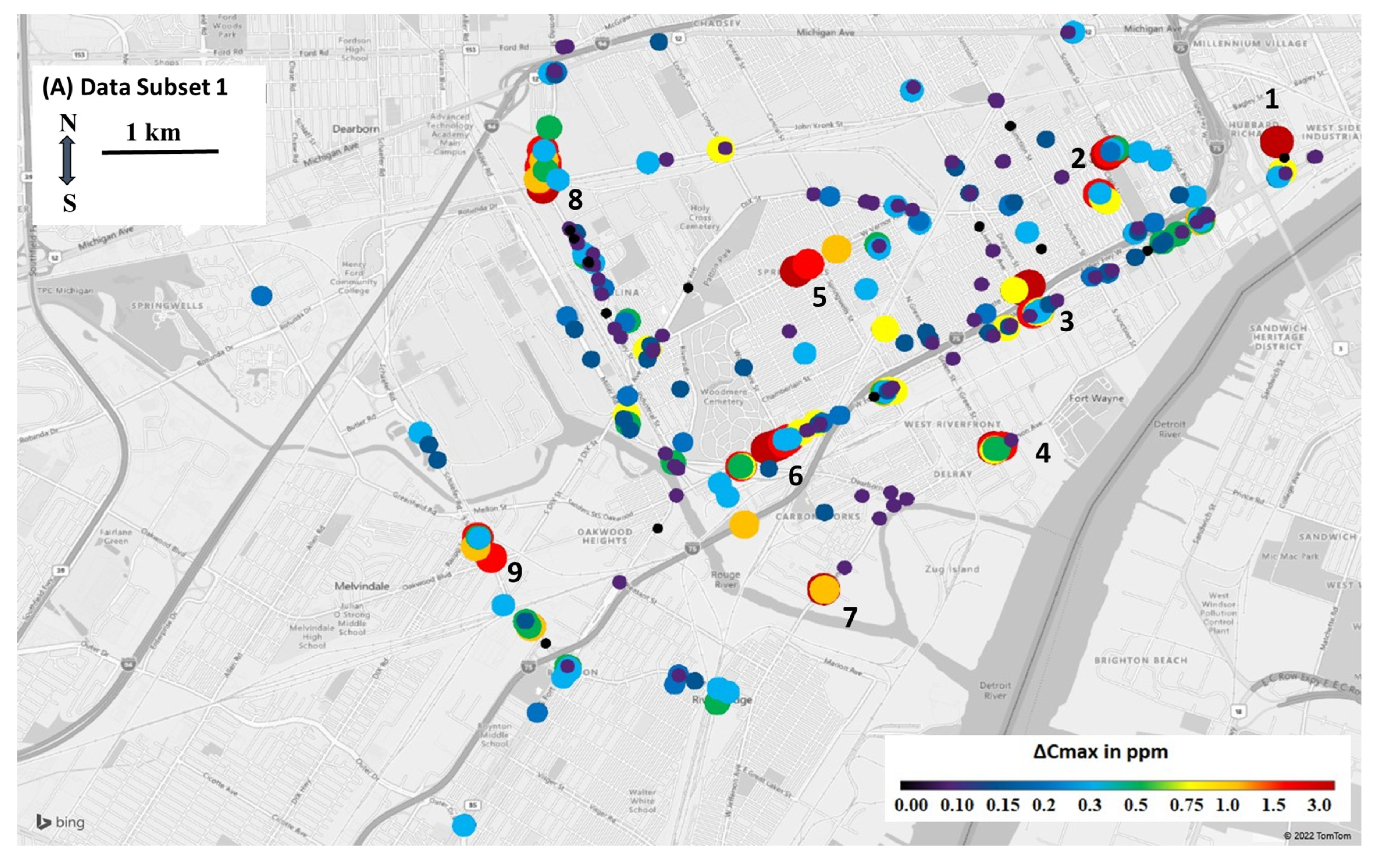
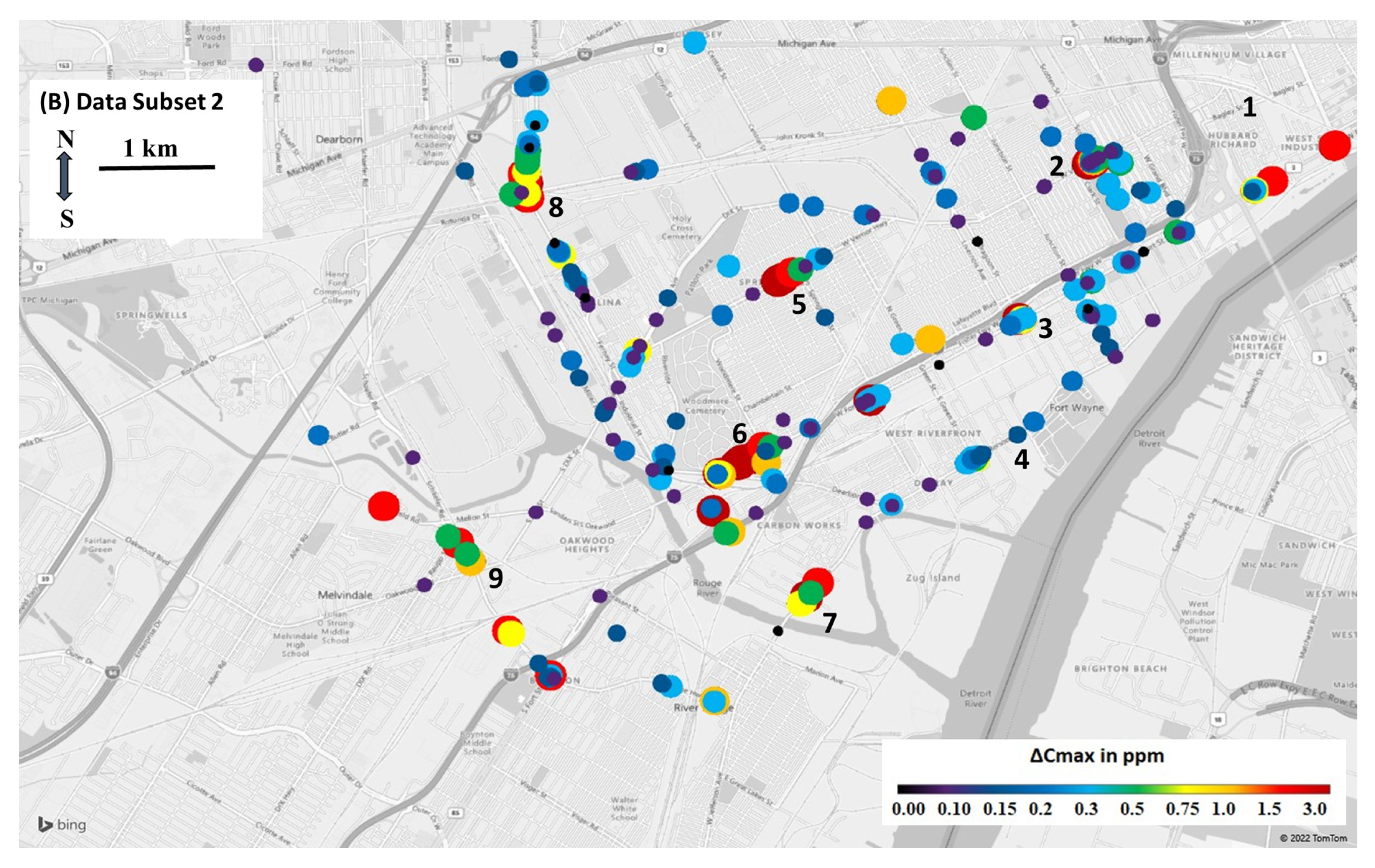
3.4. Peak Locations and CH4 Sources
3.5. Background Variation and Number of Peaks
3.6. Reliability and Repeatability
3.7. Algorithm Application Recommendations
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Unit | Description | |
| CB | ppm | Peak baseline concentration |
| CB,t | ppm | Estimated baseline concentration for measurement at time t |
| CB,pre | ppm | Pre-peak baseline concentration |
| CB,post | ppm | Post-peak baseline concentration |
| Ct | ppm | Measured concentration at time t |
| ΔCave | ppm | Average peak increments above baseline |
| ΔCmin | ppm | Minimum peak increments above baseline |
| ΔCmed | ppm | Median peak increments above baseline |
| ΔCmax | ppm | Maximum peak increments above baseline |
| ΔCthresh | ppm | Threshold for peak increment, used in pass 4 to filter out small peaks |
| dthresh | m | Distance gap threshold between two adjacent peaks, used in pass 3 to merge close peaks |
| lt | deg | Location (latitude and longitude) of the measurement at time t |
| Lp | deg | Weighted peak centroid location, as a latitude and longitude vector |
| Np | Number of measurements in the peak event | |
| Ns | Number of measurements when the vehicle is stopped | |
| p | Percentile for baseline estimation, used in pass 1 | |
| Rthresh | Threshold ratio for elevation determination, used in pass 2 | |
| t | Measurement timestamp | |
| tthresh | s | Time gap threshold between two adjacent peaks, used in pass 3 to merge close peaks |
| tp | s | Peak event duration |
| tp,thresh | s | Threshold for peak duration, used in pass 4 to filter out short peaks |
| twindow | s | Time window for baseline estimation, used in pass 1 |
| Vave | m/s | Average MPAL speed during the peak event |
| Vave* | m/s | Mean speed when the vehicle is moving during the peak event |
| Vt | m/s | Distance traveled during the measurement at time t (m), equals to the vehicle speed (m/s) when 1-s measurements are used |
| Vt* | m/s | Adjusted vehicle speed, as Vave*/Ns, for centroid calculations when the vehicle is stopped |
| W | m | Peak width |
References
- Dlugokencky, E. Global CH4 Monthly Means. 2021. Available online: https://gml.noaa.gov/ccgg/trends_ch4/ (accessed on 22 February 2021).
- Stocker, T.F.; Qin, D.; Plattner, G.; Tignor, M.; Allen, S.; Boschung, J.; Nauels, A.; Xia, Y.; Bex, V.; Midgley, P. Climate Change 2013: The Physical Science Basis. Intergovernmental Panel on Climate Change, Working Group I Contribution to the IPCC Fifth Assessment Report (AR5); Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- O’Connor, F.M.; Abraham, N.L.; Dalvi, M.; Folberth, G.A.; Griffiths, P.T.; Hardacre, C.; Johnson, B.T.; Kahana, R.; Keeble, J.; Kim, B.; et al. Assessment of pre-industrial to present-day anthropogenic climate forcing in UKESM1. Atmos. Chem. Phys. 2021, 21, 1211–1243. [Google Scholar] [CrossRef]
- Kirschke, S.; Bousquet, P.; Ciais, P.; Saunois, M.; Canadell, J.G.; Dlugokencky, E.J.; Bergamaschi, P.; Bergmann, D.; Blake, D.R.; Bruhwiler, L.; et al. Three decades of global methane sources and sinks. Nat. Geosci. 2013, 6, 813–823. [Google Scholar] [CrossRef]
- Lu, H.; Ma, X.; Azimi, M. US natural gas consumption prediction using an improved kernel-based nonlinear extension of the Arps decline model. Energy 2020, 194, 116905. [Google Scholar] [CrossRef]
- Weller, Z.D.; Roscioli, J.R.; Daube, W.C.; Lamb, B.K.; Ferrara, T.W.; Brewer, P.E.; von Fischer, J.C. Vehicle-based methane surveys for finding natural gas leaks and estimating their size: Validation and uncertainty. Environ. Sci. Technol. 2018, 52, 11922–11930. [Google Scholar] [CrossRef] [PubMed]
- Weller, Z.D.; Hamburg, S.P.; von Fischer, J.C. A national estimate of methane leakage from pipeline mains in natural gas local distribution systems. Environ. Sci. Technol. 2020, 54, 8958–8967. [Google Scholar] [CrossRef] [PubMed]
- Simonoff, J.S.; Restrepo, C.E.; Zimmerman, R. Risk management of cost consequences in natural gas transmission and distribution infrastructures. J. Loss Prev. Process Ind. 2010, 23, 269–279. [Google Scholar] [CrossRef]
- Sivathanu, Y. Natural Gas Leak Detection in Pipelines; US Department of Energy, National Energy Technology Laboratory: Pittsburgh, PA, USA, 2003.
- Lowry, W.E.; Dunn, S.D.; Walsh, R.; Merewether, D.; Rao, D.V. Method and System to Locate Leaks in Subsurface Containment Structures Using Tracer Gases. U.S. Patent No 6,035,701, 14 March 2000. [Google Scholar]
- Murvay, P.-S.; Silea, I. A survey on gas leak detection and localization techniques. J. Loss Prev. Process Ind. 2012, 25, 966–973. [Google Scholar] [CrossRef]
- Liou, J.C. Leak detection by mass balance effective for Norman wells line. Oil Gas J. 1996, 94, 69–74. [Google Scholar]
- Lu, H.; Iseley, T.; Behbahani, S.; Fu, L. Leakage detection techniques for oil and gas pipelines: State-of-the-art. Tunn. Undergr. Space Technol. 2020, 98, 103249. [Google Scholar] [CrossRef]
- O’Keefe, A.; Deacon, D.A. Cavity ring-down optical spectrometer for absorption measurements using pulsed laser sources. Rev. Sci. Instrum. 1988, 59, 2544–2551. [Google Scholar] [CrossRef] [Green Version]
- Hanson, R.; Varghese, P.; Schoenung, S.; Falcone, P. Absorption Spectroscopy of Combustion Gases Using a Tunable IR Diode Laser; ACS Publications: Washington, DC, USA, 1980. [Google Scholar]
- Crosley, D.R.; Smith, G.P. Laser-induced fluorescence spectroscopy for combustion diagnostics. Opt. Eng. 1983, 22, 225545. [Google Scholar] [CrossRef]
- Robinson, J.; Dake, J. Remote sensing of air pollutants by laser-induced infrared fluorescence—A review. Anal. Chim. Acta 1974, 71, 277–288. [Google Scholar] [CrossRef]
- Becker, E.D.; Farrar, T. Fourier Transform Spectroscopy: New methods dramatically improve the sensitivity of infrared and nuclear magnetic resonance spectroscopy. Science 1972, 178, 361–368. [Google Scholar] [CrossRef] [PubMed]
- Jackson, R.B.; Down, A.; Phillips, N.G.; Ackley, R.C.; Cook, C.W.; Plata, D.L.; Zhao, K. Natural gas pipeline leaks across Washington, DC. Environ. Sci. Technol. 2014, 48, 2051–2058. [Google Scholar] [CrossRef] [PubMed]
- Von Fischer, J.C.; Cooley, D.; Chamberlain, S.; Gaylord, A.; Griebenow, C.J.; Hamburg, S.P.; Salo, J.; Schumacher, R.; Theobald, D.; Ham, J. Rapid, vehicle-based identification of location and magnitude of urban natural gas pipeline leaks. Environ. Sci. Technol. 2017, 51, 4091–4099. [Google Scholar] [CrossRef] [PubMed]
- Weller, Z.D.; Yang, D.K.; von Fischer, J.C. An open source algorithm to detect natural gas leaks from mobile methane survey data. PLoS ONE 2019, 14, e0212287. [Google Scholar] [CrossRef] [Green Version]
- Barchyn, T.E.; Hugenholtz, C.H.; Myshak, S.; Bauer, J. A UAV-based system for detecting natural gas leaks. J. Unmanned Veh. Syst. 2017, 6, 18–30. [Google Scholar] [CrossRef] [Green Version]
- Barchyn, T.E.; Hugenholtz, C.H.; Fox, T.A.; Helmig, D.; Lamb, B. Plume detection modeling of a drone-based natural gas leak detection system. Elem. Sci. Anthr. 2019, 7, 41. [Google Scholar] [CrossRef]
- Golston, L.M.; Aubut, N.F.; Frish, M.B.; Yang, S.; Talbot, R.W.; Gretencord, C.; McSpiritt, J.; Zondlo, M.A. Natural gas fugitive leak detection using an unmanned aerial vehicle: Localization and quantification of emission rate. Atmosphere 2018, 9, 333. [Google Scholar] [CrossRef] [Green Version]
- Wei, P.; Brimblecombe, P.; Yang, F.; Anand, A.; Xing, Y.; Sun, L.; Sun, Y.; Chu, M.; Ning, Z. Determination of local traffic emission and non-local background source contribution to on-road air pollution using fixed-route mobile air sensor network. Environ. Pollut. 2021, 290, 118055. [Google Scholar] [CrossRef]
- Actkinson, B.; Ensor, K.; Griffin, R.J. SIBaR: A new method for background quantification and removal from mobile air pollution measurements. Atmos. Meas. Tech. 2021, 14, 5809–5821. [Google Scholar] [CrossRef]
- Xia, T.; Catalan, J.; Hu, C.; Batterman, S. Development of a mobile platform for monitoring gaseous, particulate, and greenhouse gas (GHG) pollutants. Environ. Monit. Assess. 2021, 193, 1–22. [Google Scholar] [CrossRef]
- Hourly/Sub-Hourly Observational Data Version 3.0.0. 2021. Available online: https://www.ncei.noaa.gov/maps/hourly/ (accessed on 5 January 2022).
- Allen, D. Attributing Atmospheric Methane to Anthropogenic Emission Sources. Accounts Chem. Res. 2016, 49, 1344–1350. [Google Scholar] [CrossRef] [PubMed]
- Bilec, M.M.; Ries, R.J.; Matthews, H.S. Life-cycle assessment modeling of construction processes for buildings. J. Infrastruct. Syst. 2010, 16, 199–205. [Google Scholar] [CrossRef]
- Lavoie, T.N.; Shepson, P.B.; Gore, C.A.; Stirm, B.H.; Kaeser, R.; Wulle, B.; Lyon, D.; Rudek, J. Assessing the methane emissions from natural gas-fired power plants and oil refineries. Environ. Sci. Technol. 2017, 51, 3373–3381. [Google Scholar] [CrossRef]
- Miller, S.M.; Wofsy, S.C.; Michalak, A.M.; Kort, E.A.; Andrews, A.E.; Biraud, S.C.; Dlugokencky, E.J.; Eluszkiewicz, J.; Fischer, M.L.; Janssens-Maenhout, G. Anthropogenic emissions of methane in the United States. Proc. Natl. Acad. Sci. USA 2013, 110, 20018–20022. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Time_Start | Time_End | Temperature (°C) | Wind_Direction (deg) | Wind_Speed (m/s) | Ceiling_Height (m) | Pressure (mbar) |
|---|---|---|---|---|---|---|---|
| Data Subset 1 | |||||||
| 26/May/2021 | 14:30 | 18:30 | 23.8 | 269 | 5.6 | 11,971 | 1013.8 |
| 2/Jun/2021 | 9:30 | 12:00 | 19.0 | 181 | 2.9 | 1966 | 1018.8 |
| 7/Jun/2021 | 11:00 | 15:30 | 27.1 | 189 | 4.8 | 11,061 | 1015.3 |
| 20/Sep/2021 | 11:00 | 13:30 | 26.5 | 161 | 4.4 | 16,421 | 1017.6 |
| 22/Oct/2021 | 10:00 | 15:00 | 10.3 | 358 | 2.5 | 12,405 | 1017.1 |
| 27/Oct/2021 | 12:00 | 17:00 | 11.4 | 16 | 1.4 | 285 | 1015.9 |
| 3/Nov/2021 | 15:00 | 18:00 | 5.9 | 298 | 1.0 | 4804 | 1027.3 |
| 4/Nov/2021 | 14:00 | 16:30 | 6.8 | 311 | 2.3 | 3641 | 1026.2 |
| 12/Nov/2021 | 10:30 | 16:00 | 10.1 | 220 | 8.5 | 10,980 | 1007.3 |
| 17/Nov/2021 | 11:30 | 17:30 | 16.6 | 209 | 7.3 | 560 | 1009.6 |
| Data Subset 2 | |||||||
| 27/May/2021 | 14:00 | 16:00 | 18.2 | 57 | 5.6 | 17,973 | 1019.7 |
| 11/Jun/2021 | 7:30 | 9:00 | 25.4 | 82 | 2.8 | 22,000 | 1010.9 |
| 15/Jun/2021 | 10:00 | 12:00 | 23.3 | 345 | 5.5 | 15,140 | 1016.0 |
| 7/Jul/2021 | 12:00 | 15:30 | 28.6 | 233 | 4.3 | 13,373 | 1011.7 |
| 23/Aug/2021 | 13:00 | 17:30 | 29.7 | 293 | 3.1 | 22,000 | 1013.7 |
| 14/Sep/2021 | 10:30 | 15:00 | 29.7 | 214 | 7.3 | 14,513 | 1009.2 |
| 24/Sep/2021 | 9:00 | 12:00 | 19.0 | 256 | 5.2 | 19,281 | 1014.9 |
| 8/Oct/2021 | 12:30 | 16:30 | 22.7 | 140 | 3.2 | 7106 | 1016.0 |
| 13/Oct/2021 | 12:00 | 17:00 | 22.5 | 221 | 3.9 | 13,649 | 1014.8 |
| 10/Nov/2021 | 15:00 | 18:00 | 10.2 | 88 | 2.3 | 15,679 | 1022.1 |
| Parameter Set | Weller et al. [21] | Set 1 | Set 2 | Set 3 | Set 4 | Set 4 Data Subset 2 | Fixed_BL_1.9 | Fixed_BL_2.0 | Fixed_BL_2.2 |
|---|---|---|---|---|---|---|---|---|---|
| twindow (s) | 150 | 450 | 450 | 300 | 150 | 150 | |||
| Rthresh | 1.1 | 1.05 | 1.025 | 1.05 | 1.05 | 1.05 | 1.1 | 1.05 | 1.025 |
| p | 0.50 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | |||
| tthresh (s) | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| dthresh (m) | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | |
| ΔCthresh (ppm) | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 | 0.03 |
| tp,thresh (s) | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Peak #_Pass2 | 206 | 319 | 386 | 337 | 350 | 348 | 309 | 304 | 245 |
| Peak #_Pass3 | 197 | 277 | 324 | 296 | 305 | 278 | 257 | 254 | 206 |
| Peak #_Pass4 | 166 | 254 | 246 | 273 | 280 | 254 | 231 | 232 | 184 |
| Flag: BL (start) out of Range (percentage) | 16.3% | 0.0% | 0.0% | 0.4% | 1.1% | 0.0% | |||
| Flag: Elevated Obs (percentage) | 0.6% | 0.8% | 16.7% | 1.5% | 4.3% | 5.9% | |||
| Flag: BL Shift (percentage) | 59.0% | 27.6% | 19.9% | 30.0% | 35.4% | 30.7% | |||
| Flag: Small Peak (percentage) | 0.0% | 5.1% | 21.5% | 4.8% | 5.0% | 3.9% | 0.0% | 0.0% | 13.0% |
| Flag: Dur too Long (percentage) | 0.0% | 0.4% | 4.9% | 1.5% | 0.0% | 0.0% | 3.0% | 2.6% | 0.0% |
| Flag: Dis too Long (percentage) | 7.8% | 15.7% | 34.6% | 16.1% | 12.9% | 13.0% | 19.5% | 17.7% | 11.4% |
| Flag: Stopped during Peak (percentage) | 12.7% | 16.9% | 29.7% | 16.5% | 15.0% | 22.0% | 22.5% | 21.6% | 15.8% |
| CB_Ave (ppm) | 2.08 | 2.01 | 2.01 | 2.02 | 2.03 | 2.03 | |||
| CB_Median (ppm) | 2.06 | 2.01 | 2.01 | 2.01 | 2.02 | 2.02 | |||
| CB_Min (ppm) | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.93 | |||
| CB_Max (ppm) | 2.47 | 2.19 | 2.20 | 2.20 | 2.22 | 2.17 | |||
| ΔCmax_Ave (ppm) | 1.63 | 1.05 | 1.04 | 1.02 | 1.02 | 1.26 | 1.06 | 0.97 | 1.36 |
| ΔCmax_Median (ppm) | 0.63 | 0.27 | 0.24 | 0.27 | 0.28 | 0.26 | 0.35 | 0.25 | 0.43 |
| ΔCmax_Min (ppm) | 0.19 | 0.06 | 0.06 | 0.08 | 0.08 | 0.07 | 0.19 | 0.10 | 0.07 |
| ΔCmax_Max (ppm) | 23.34 | 23.37 | 23.37 | 23.37 | 23.37 | 31.59 | 23.64 | 23.54 | 23.34 |
| CB (ppm) | ΔCmax (ppm) | ΔCave (ppm) | ΔCmed (ppm) | ||
|---|---|---|---|---|---|
| Valid Sample Size | 280 | 280 | 280 | 280 | |
| Average | 2.03 | 1.02 | 0.37 | 0.26 | |
| Standard Deviation | 0.08 | 2.38 | 0.53 | 0.23 | |
| Percentile | 0.000 | 1.89 | 0.08 | 0.08 | 0.08 |
| 0.250 | 1.96 | 0.13 | 0.11 | 0.11 | |
| 0.500 | 2.02 | 0.28 | 0.19 | 0.18 | |
| 0.750 | 2.08 | 0.80 | 0.38 | 0.31 | |
| 0.900 | 2.16 | 2.33 | 0.77 | 0.51 | |
| 0.980 | 2.19 | 7.85 | 2.08 | 0.95 | |
| 0.990 | 2.21 | 12.97 | 2.55 | 1.13 | |
| 0.999 | 2.22 | 21.53 | 4.53 | 1.73 | |
| 1.000 | 2.22 | 23.37 | 4.92 | 1.75 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, T.; Raneses, J.; Batterman, S. Improving the Performance of Pipeline Leak Detection Algorithms for the Mobile Monitoring of Methane Leaks. Atmosphere 2022, 13, 1043. https://doi.org/10.3390/atmos13071043
Xia T, Raneses J, Batterman S. Improving the Performance of Pipeline Leak Detection Algorithms for the Mobile Monitoring of Methane Leaks. Atmosphere. 2022; 13(7):1043. https://doi.org/10.3390/atmos13071043
Chicago/Turabian StyleXia, Tian, Julia Raneses, and Stuart Batterman. 2022. "Improving the Performance of Pipeline Leak Detection Algorithms for the Mobile Monitoring of Methane Leaks" Atmosphere 13, no. 7: 1043. https://doi.org/10.3390/atmos13071043
APA StyleXia, T., Raneses, J., & Batterman, S. (2022). Improving the Performance of Pipeline Leak Detection Algorithms for the Mobile Monitoring of Methane Leaks. Atmosphere, 13(7), 1043. https://doi.org/10.3390/atmos13071043