1. Introduction
As a result of an increasing demand for renewable wind energy, modern wind turbines and large-scale wind farms are being developed at a rapid rate. Due to the space limitation for wind farms, wind turbines are implemented into dense clusters [
1] so that the efficiency of the wind turbines are affected by the turbine wake flows, which reduces the energy production and increases the probability of fatigue on the turbine components [
2,
3]. To address this problem, accurate and fast monitoring of the wind field is a key point to provide essential data for wind farm layout, real-time control and maintenance [
4]. One of the most promising techniques for imaging wind fields is the Doppler light detection and ranging (LiDAR). Compared to other techniques, LiDAR has the advantages of high accuracy, high spatial resolution, and long measurement range [
5], which makes it the most suitable measurement technique to image turbine wakes in wind fields [
6].
Wind LiDAR can only measure the radial velocity in the direction of the laser beams but ignores the wind component transversal to the laser beams. Therefore, a single LiDAR system cannot provide sufficient data to fully retrieve a 2D/3D wind field [
7,
8]. A common practice of industrial application assumes flow homogeneity, which is not suitable for turbine wake wind field imaging due to complex wind conditions [
9,
10]. Cherukuru developed a 2D VAR wind retrieval method [
9]. Using radial velocity advection equation as an additional constraint, the proposed method was able to retrieve a 2D wind field from measurements based on a single LiDAR. However, this method lacks accuracy due to the complexity of wind fields and the low signal-to-noise ratio (SNR) of LiDAR measurements [
11].
To overcome this problem, a research group at the Technical University of Denmark (DTU) investigated multiple LiDAR system, which utilised spatially coordinated and temporally synchronised Doppler LiDAR units to scan over the same area from different locations and retrieve wind images from three radial velocities [
12,
13]. Specifically, when dual-LiDAR observations were used in 2D VAR retrievals, the accuracy largely increased compared to the single LiDAR system [
14]. However, the high-quality wind retrieval of multiple LiDAR systems is at the cost of high equipment and operation cost [
15].
Alternatively, van Dooren proposed a Multiple-LiDAR Wind Field Evaluation Algorithm (MuLiWEA) [
7]. With the help of grid interpolation, the proposed wind retrieval method did not require a set of fully synchronised dual-LiDAR measurements. The two LiDAR systems can scan the sensing area individually without synchronisation of LiDAR beams for intersecting points’ radial velocity measurement [
7]. Hon from Hong Kong Observatory presented a fast dual-Doppler LiDAR retrieval method, which utilised data from two unsynchronised LiDAR systems to scan the boundary layer wind profile over Hong Kong International Airport. This algorithm offers the possibility to use measurements from scanning scenarios with low complexity and fast area coverage. However, this method also requires the frozen field assumption that the wind field remains constant during the whole LiDAR scanning process, which may not be suitable for the fast-changing turbine wake wind field.
The unsynchronised LiDAR system also offers the flexibility for spatial and temporal resolution adjustment [
16]. Unlike the synchronised dual-LiDAR system, whose scanning trajectories are predesigned for intersecting points in the sensing area, the unsynchronised LiDAR system can easily change the scanning pattern and interval for optimised spatial-temporal resolution. Beck studied the dual-LiDAR spatial-temporal conversion method for LiDAR measurement up-sampling, which increased the temporal resolution of the LiDAR data by a factor of 2.4 to 40 [
17].
Despite the improvement in temporal resolution, Beck’s up-sampling method is computationally expensive. During the spatial-temporal conversion, the interpolation is computed based on the temporal evolution of wind field in a point-wise and iterative fashion, which is time consuming and memory intensive [
17]. After each interpolation, wind velocities on the regular cartesian grids are displaced to an irregular grid. A post interpolation process is needed, which maps the wind velocities onto the initial grid using natural-neighbour interpolation. Consequently, this will not only cause additional computational cost, but also cause shift error within the retrieved wind velocity.
In order to improve the temporal resolution of LiDAR wind retrieval and capture the dynamic characteristics of the fast-changing turbine wake wind field, in this study, a novel approach is proposed to reduce the number of LiDAR scans for fast wind field imaging using dual-LiDAR system. There are two research objectives to be achieved: (1) To improve the temporal resolution of wind retrievals to catch fast wind field changes; (2) to quantitatively assure the spatial resolution of wind images for revealing the detailed wind field. To achieve the proposed objectives, the following steps are implemented: (1) Obtain Line of Sight (LoS) data from an unsynchronised dual-LiDAR system and align the two LoS dataset into pre-set grids, then apply matrix completion for LoS data up-sampling; (2) design spatial regularisation for 2D horizontal wind field, then apply a robust reconstruction algorithm for wind retrieval. The novelties of the proposed method are to use low-rank matrix completion for LoS data up-sampling and build a spatial regularisation with vector Laplacian and divergence-free term for better wind retrieval quality. Compared to other LiDAR up-sampling strategies, such as Beck’s method, the proposed method does not require the calculation of wind field evolution and a post interpolation process, therefore it has the advantages of high flexibility in up-sampling factors and reduction in computational cost due to the fast LoS data matrix completion process. A simulation study is carried out to validate the performance of the proposed method.
2. Methods
2.1. Forward Modelling of LiDAR
The forward problem of LiDAR wind retrieval defines the relationship between the Line-of-Sight (LoS) radial velocity
vr and wind speed components
u,
v, and w in x-, y- and z-direction. In this paper, the vertical wind speed component
w is ignored because the elevation angles
φ of the PPI scans applied are commonly small, and, therefore, only horizontal wind velocity components
u, and
v are considered. Therefore, the radial velocity
is defined as [
18]:
where
θ is the azimuth angle.
In addition, the flow is discretised into
N square grids with side length of
d, which is the spatial resolution of LiDAR wind retrieval. Given the scanning trajectory, the forward model is defined in matrix form as:
where
is the radial velocity and
M denotes the number of scanning points,
and
are the discretised wind speed components and
is the selection matrix built according to the LiDAR scanning points, which is defined as:
where
and
are the measurement matrices that transform the wind velocity components to the radial velocity, whose elements are defined as:
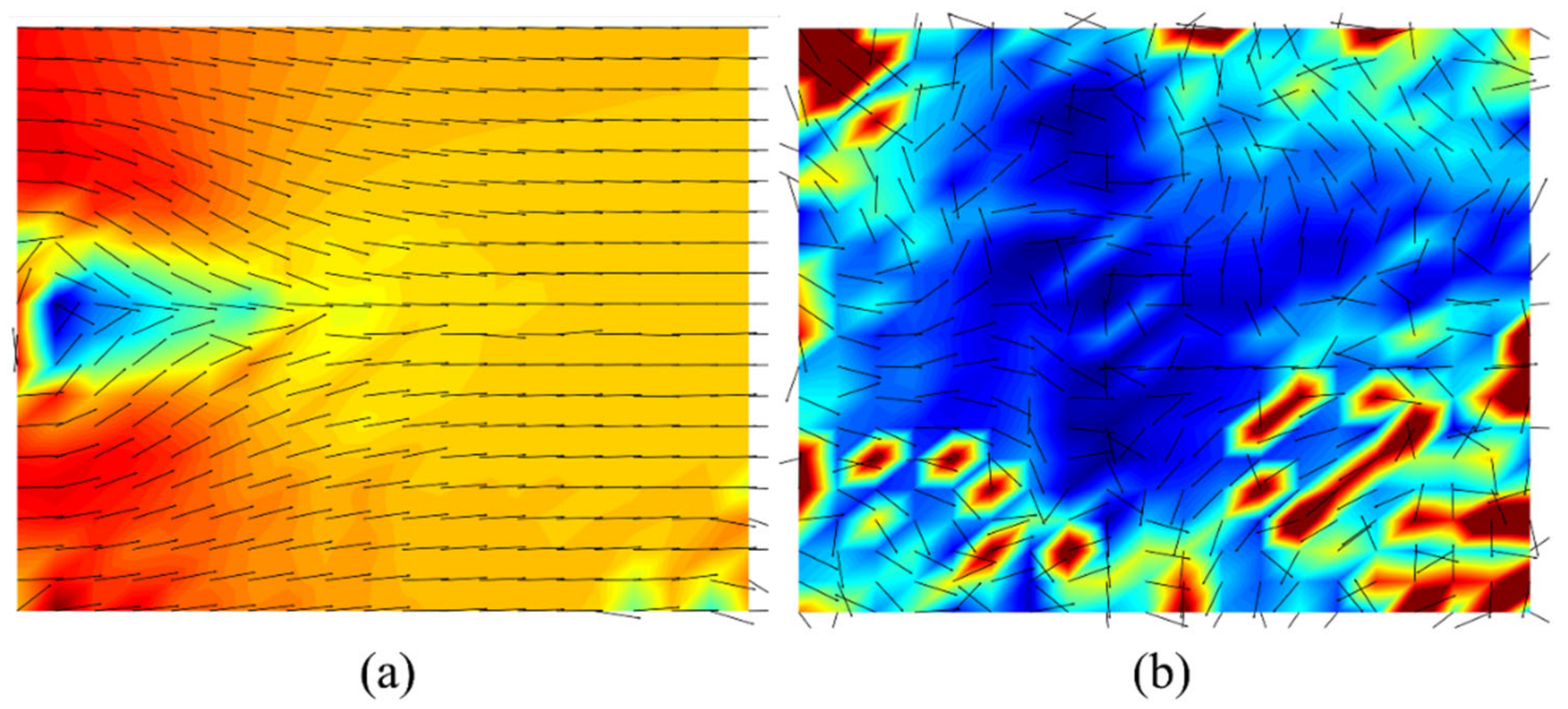
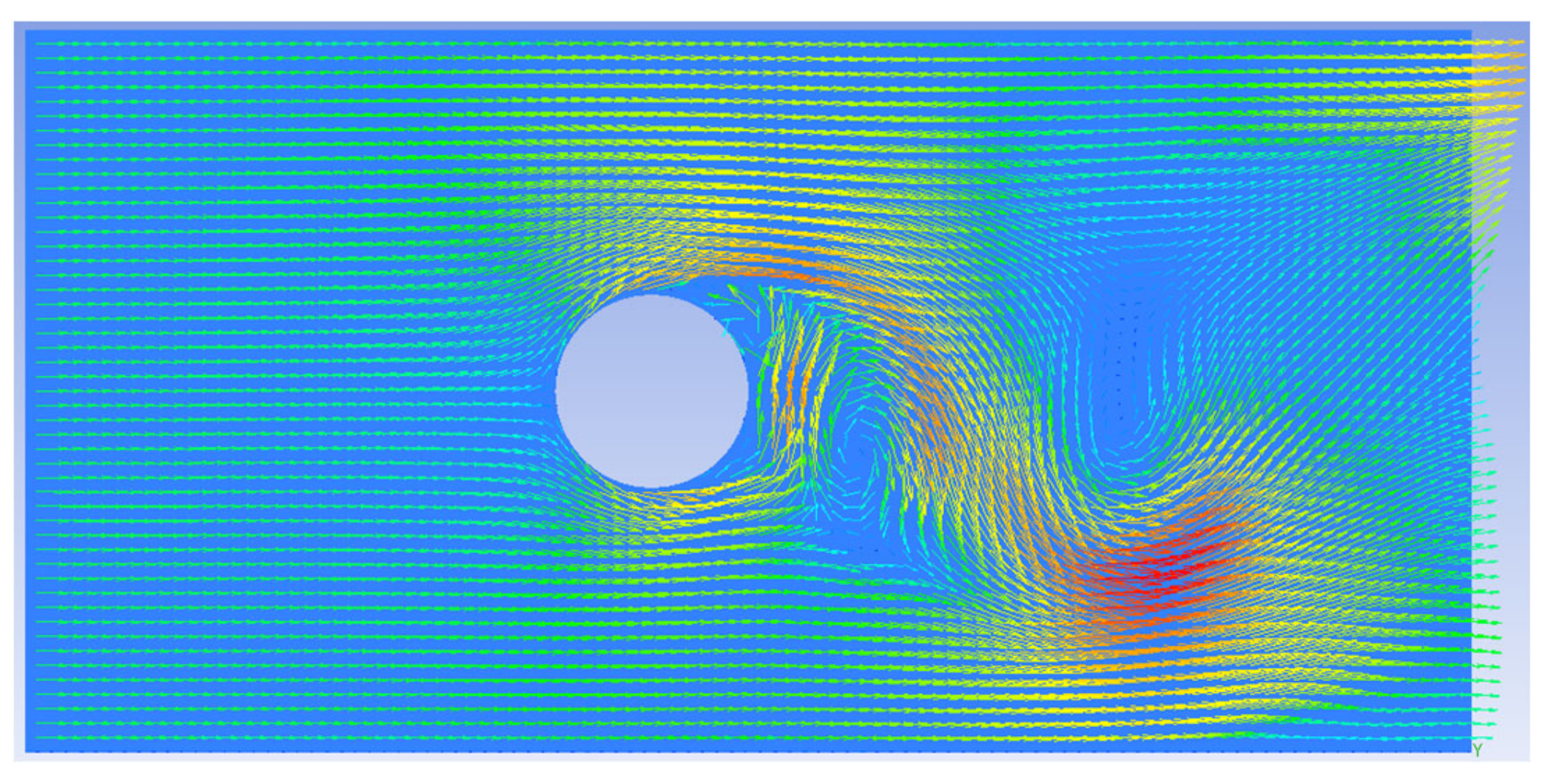
The forward model defined above is based on the frozen field assumption that the wind field remains constant during the whole LiDAR scanning process, without considering the dynamic flow characteristic when the
M number of scanning points are collected. As a result, the retrieved wind field will be dominated by the retrieval error and the wind velocity changes cannot be resolved. An example is shown in
Figure 1.
Differently, in this paper, the wind velocity is considered to be stationary for a short time period t, which is the temporal resolution of the target LiDAR wind retrieval. Therefore, the dynamic forward problem can be modified. Specifically, the radial velocities and wind velocity for each time interval can be stacked as columns and denoted as , and , where T is the number of time intervals, and is the radial velocities measured within each time interval.
Each column refers to one time interval. Then, the forward problem for successive LiDAR measurements can be written as:
where the block diagonal matrices are given as
and
.
2.2. Dual-LiDAR Wind Retrieval
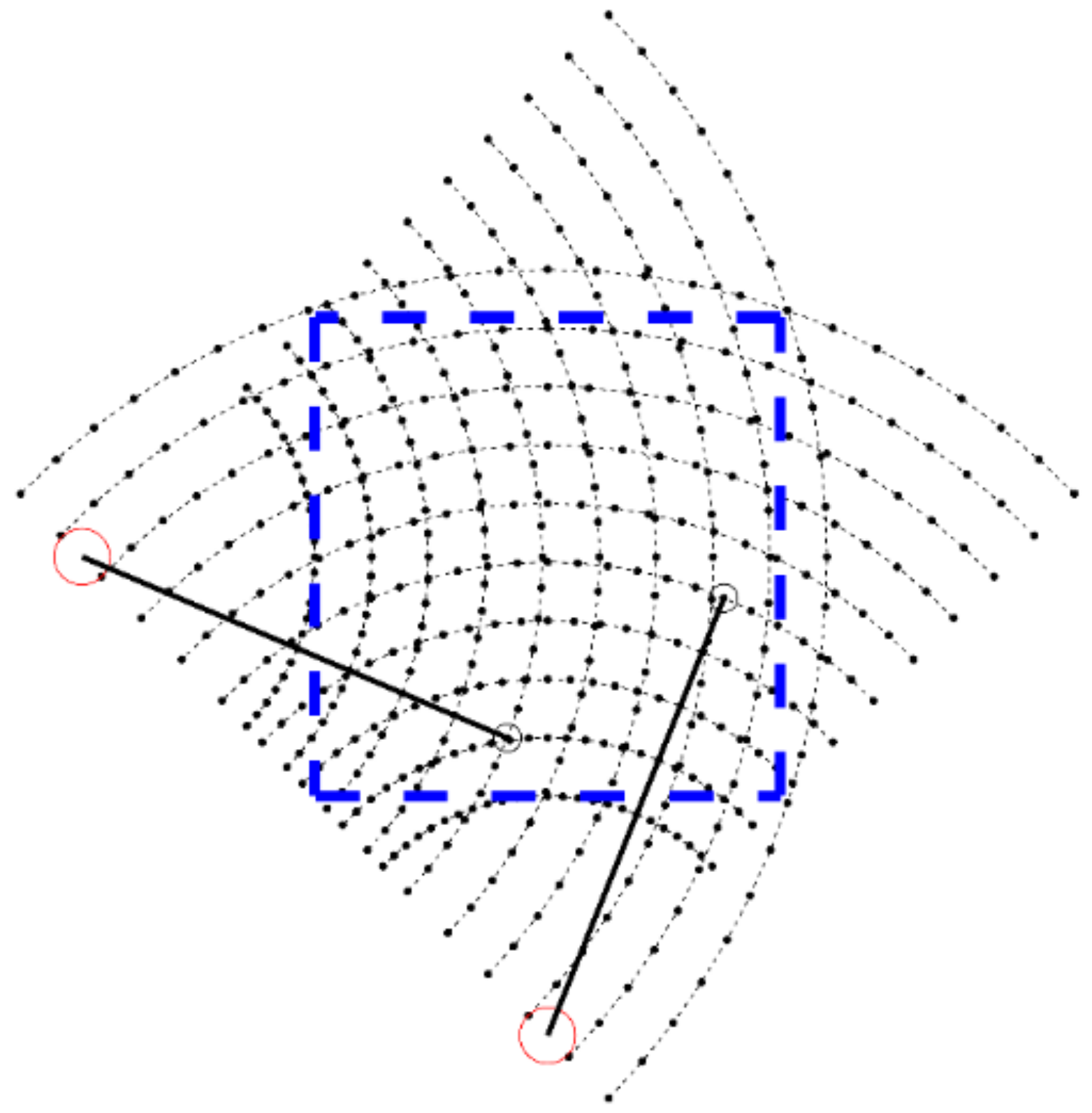
To resolve the 2D horizontal wind field, a dual-LiDAR system is applied. Inspired by van Dooren’s research [
7], the two LiDARs work in a unsynchronised way, that performs PPI scans independently to cover the sensing area, as shown in
Figure 2.
Radial velocities from the dual-LiDAR system can be used to reconstruct the 2D wind field by solving the following inverse problem:
where
R(U,V) denotes the regularisation term, which consists of the divergence-free regularisation and the Tikhonov regularisation.
Firstly, the 2D horizontal wind velocity field can be considered as a divergence-free vector field. This assumption is valid, as the stratification in the atmosphere caused by gravity makes the horizontal velocity
u and
v greater than the vertical velocity
w by a factor of 10–100 [
19]. Usually for the wind data used here,
w can be ignored, and (
u,
v) becomes a divergence-free vector field [
19]. Therefore, we can apply a divergence-free constraint in the reconstruction of wind velocity field.
Secondly, vector Laplacian regularisation is applied to pose a smoothness constraint to the wind components in x- and y-axis, respectively, which stabilises the retrieval process when the inverse problem is solved.
Generally, the
R(U,V) is defined as [
20]:
where
α1 and
α2 are the regularisation parameters for each regularisation term. The regularisation parameters are determined empirically based on the simulation results and kept constant when solving the inverse problem of wind retrieval, given all the different datasets [
1,
2]. The vector divergence term and vector Laplacian can be determined by the following equations.
where
are the two directional discrete operators along
x- and
y-axis for the calculation of the vector divergence and Laplacian, which is defined as a finite differential approximation. The discrete 2nd order finite differential approximation is used inside the sensing area and 1st order differential for boundary pixel.
Consequently,
u and
v in Equation (10) can be solved jointly and efficiently using the interior-point method [
21], which is implemented by the MOSEK optimisation suite in MATLAB [
22].
2.3. Spatial-Temporal Conversion and Up-Sampling
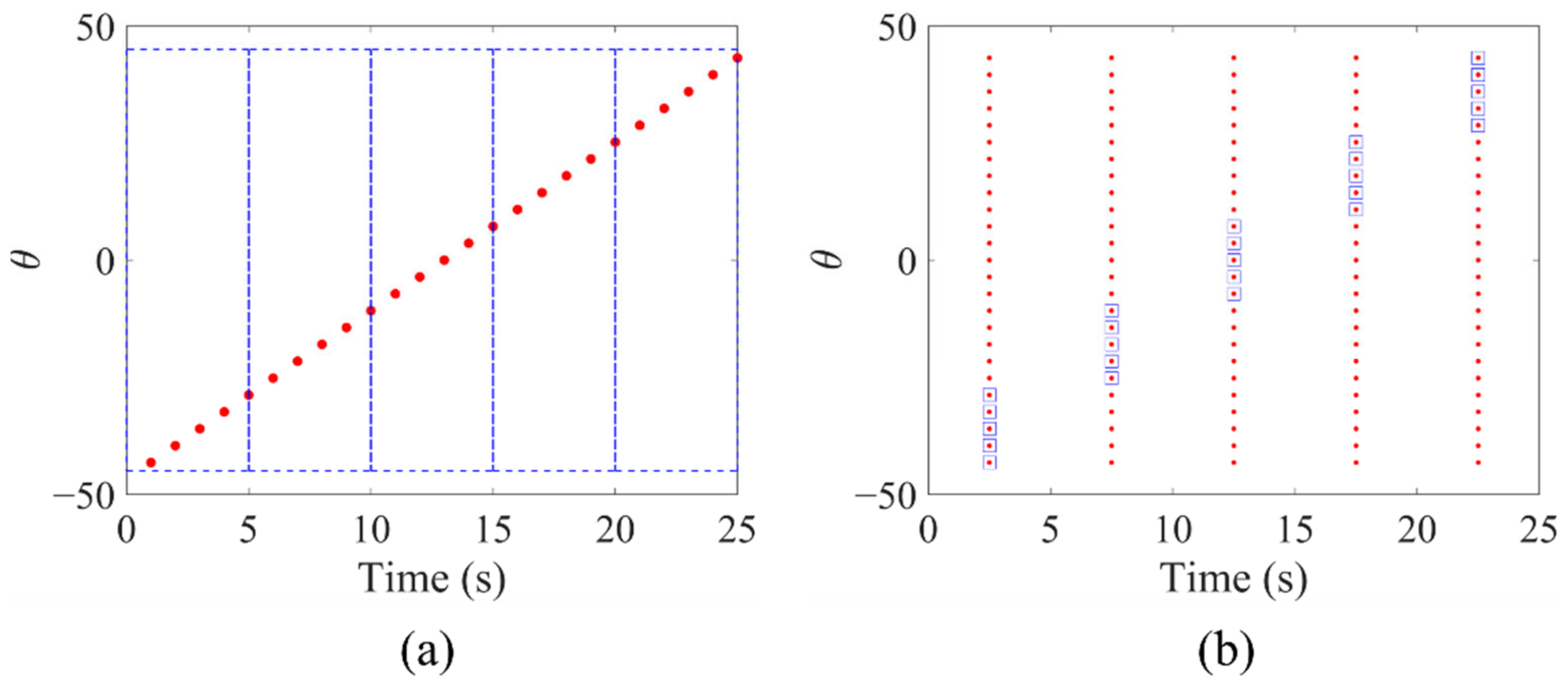
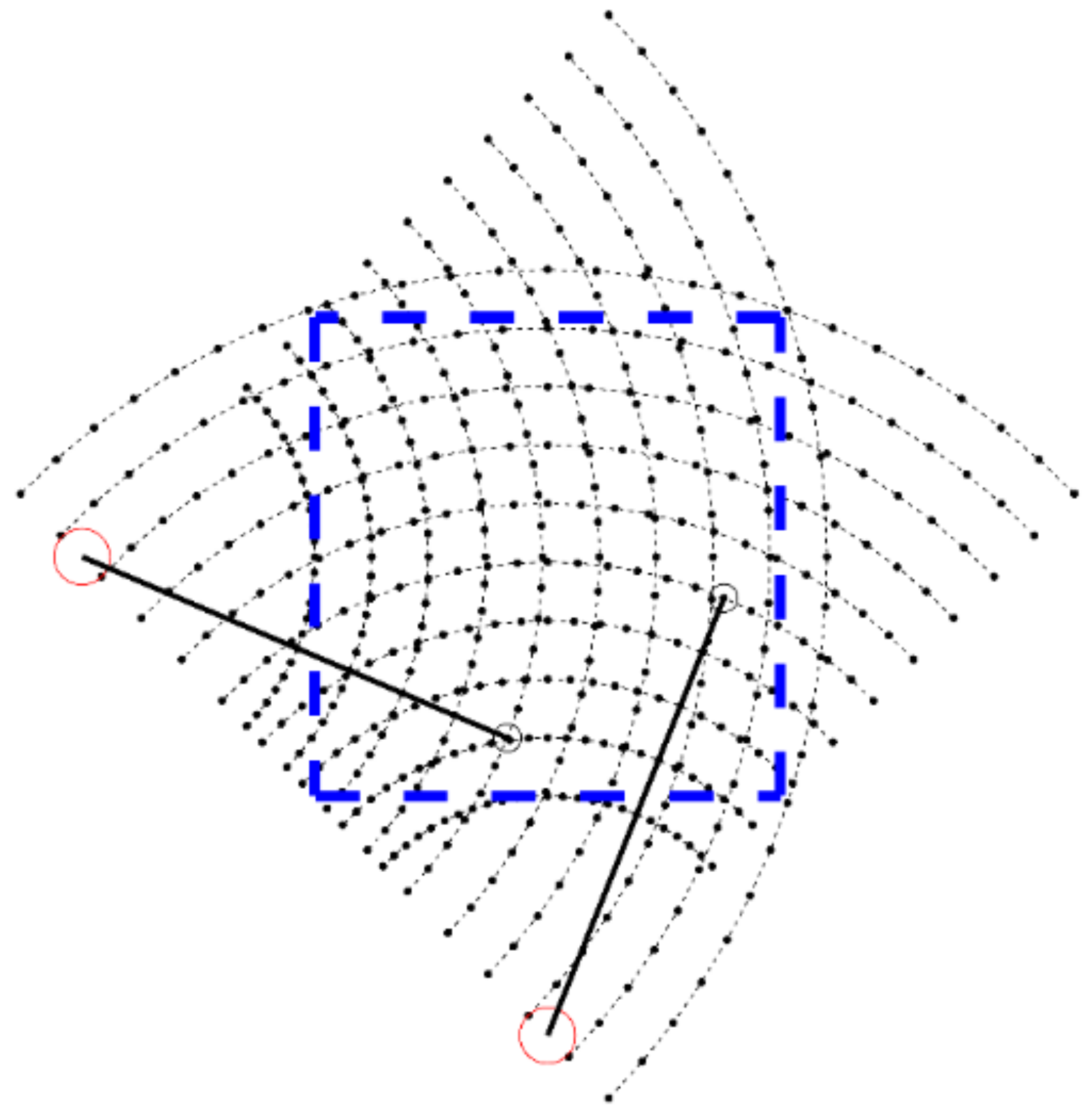
The temporal resolution of LiDAR wind retrieval is determined by the length of the measurement time window, which should be chosen based on the time scale of the wind field evolving. Therefore, for the fast-changing turbine wake wind field, the short time window allows a reduced number of LiDAR scans. As shown in
Figure 3, within each time interval, only a small number of radial velocities can be obtained. Due to the missing scanning points, the retrieved accuracy of the wind field for each time step is greatly affected. To solve this problem, Beck proposed a temporal up-sampling method using spatial-temporal conversion. However, their method relies on the backwards-oriented propagation, which is computational expensive during the calculation of wind field evolution. Differently, in this paper, we present a temporal up-sampling method for LiDAR dataset based on the classic matrix completion algorithm. The general idea is to calculate the missing scanning data within each time step based on the spatial and temporal correlations of the radial velocity, as shown in
Figure 3b. Our target is to maintain quantitative accuracy during the data interpolation, without spending too many computational resources on calculating wind flow propagation.
To illustrate the up-sampling method, we only consider a simple case when a reconstructed wind field uses single the LiDAR dataset, but it is straightforward to extend the proposed method for the dual-LiDAR system.
To begin with, LiDAR dataset is a K by T radial velocity matrix Vr containing a total of M radial velocity measurements. To reconstruct the dynamic wind field with T time steps, the fully sampled M by T radial velocity matrix is needed. Therefore, the problem is to calculate the M by T fully sampled data, given a K by T subset Vr.
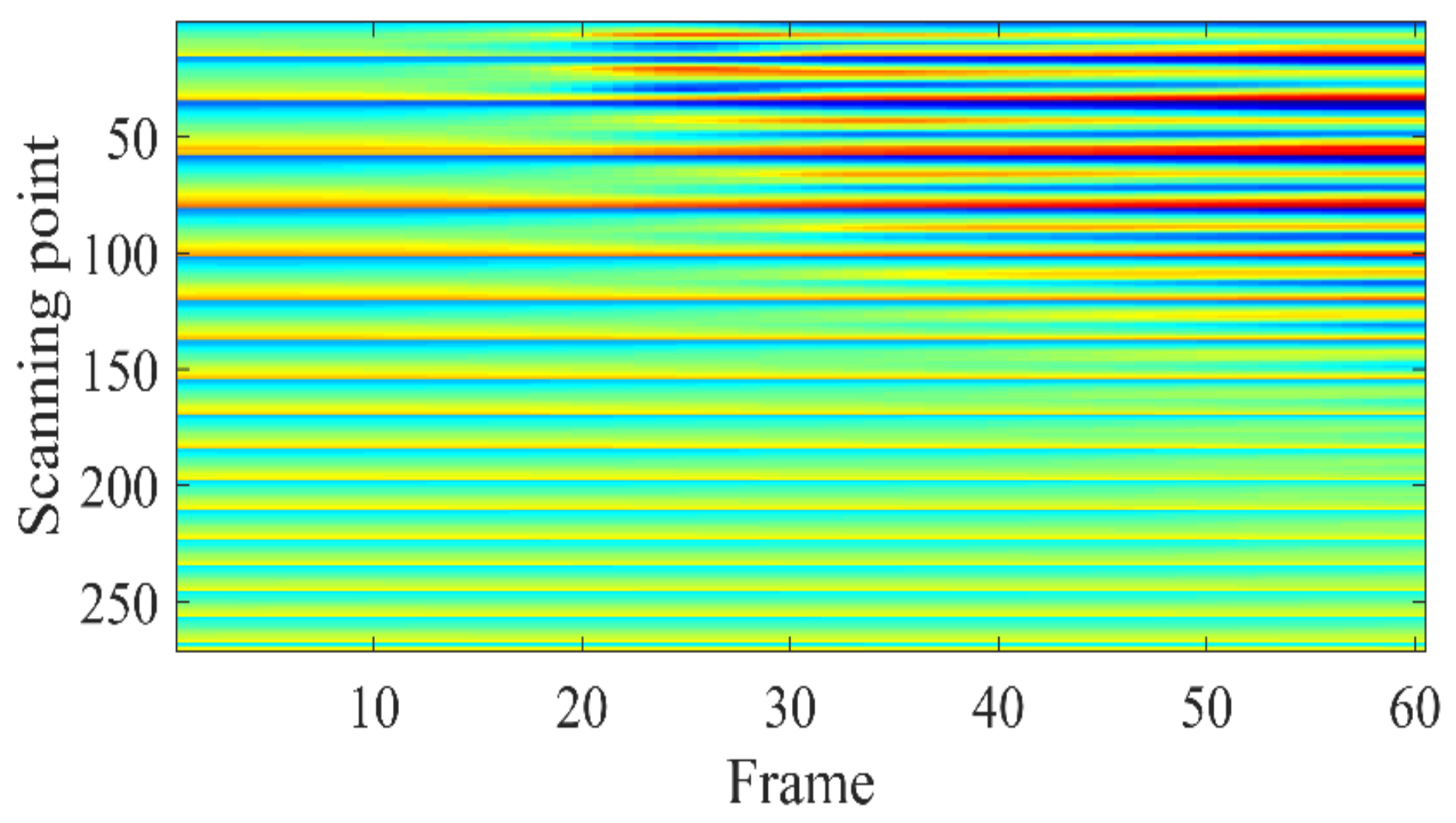
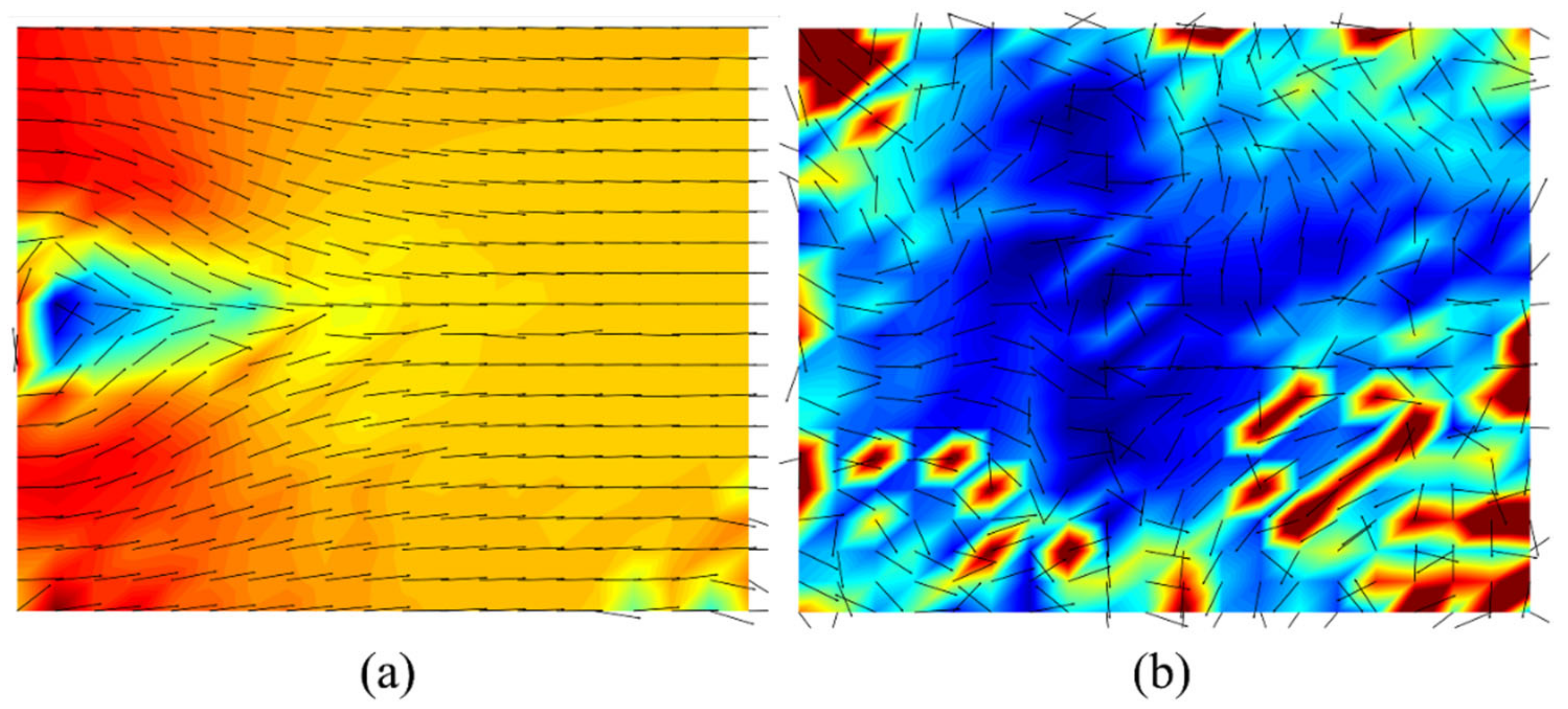
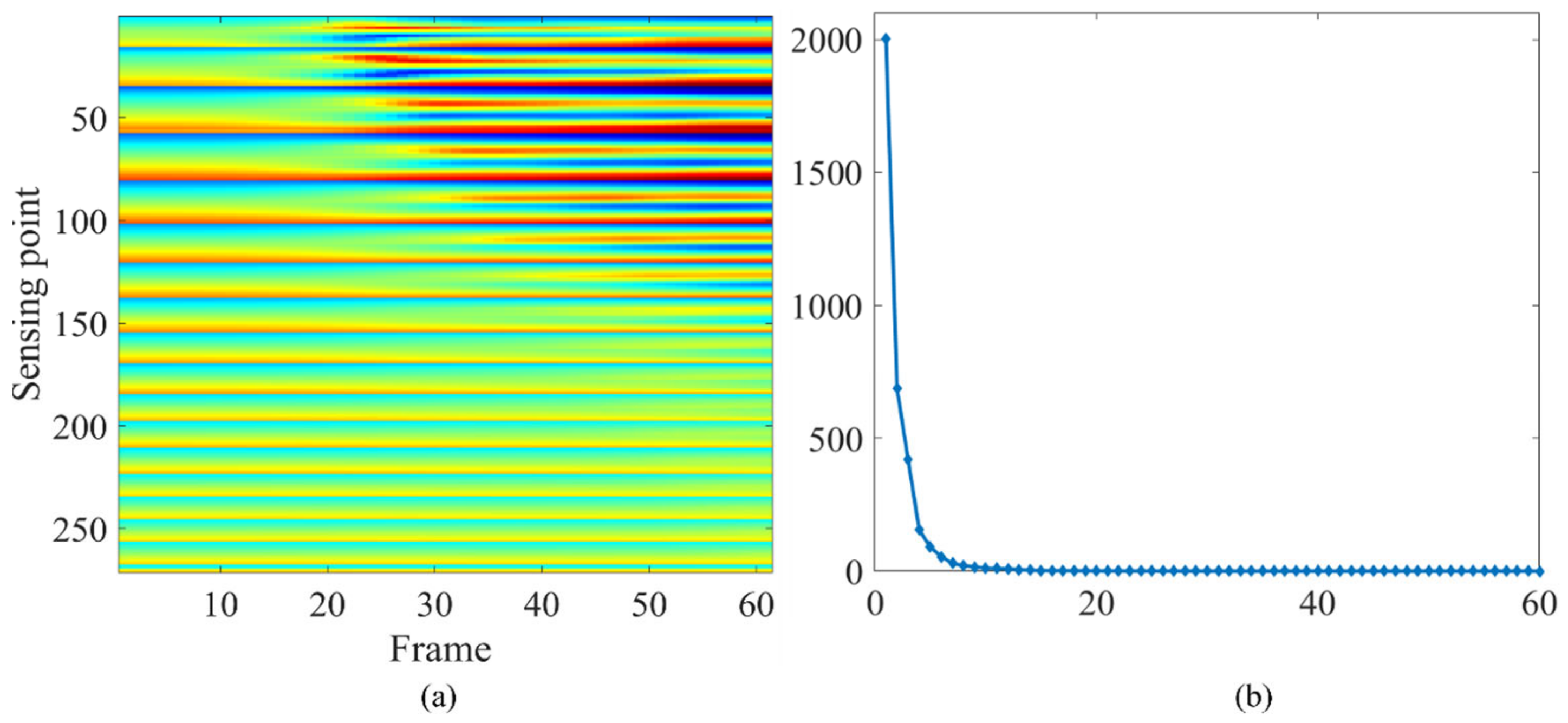
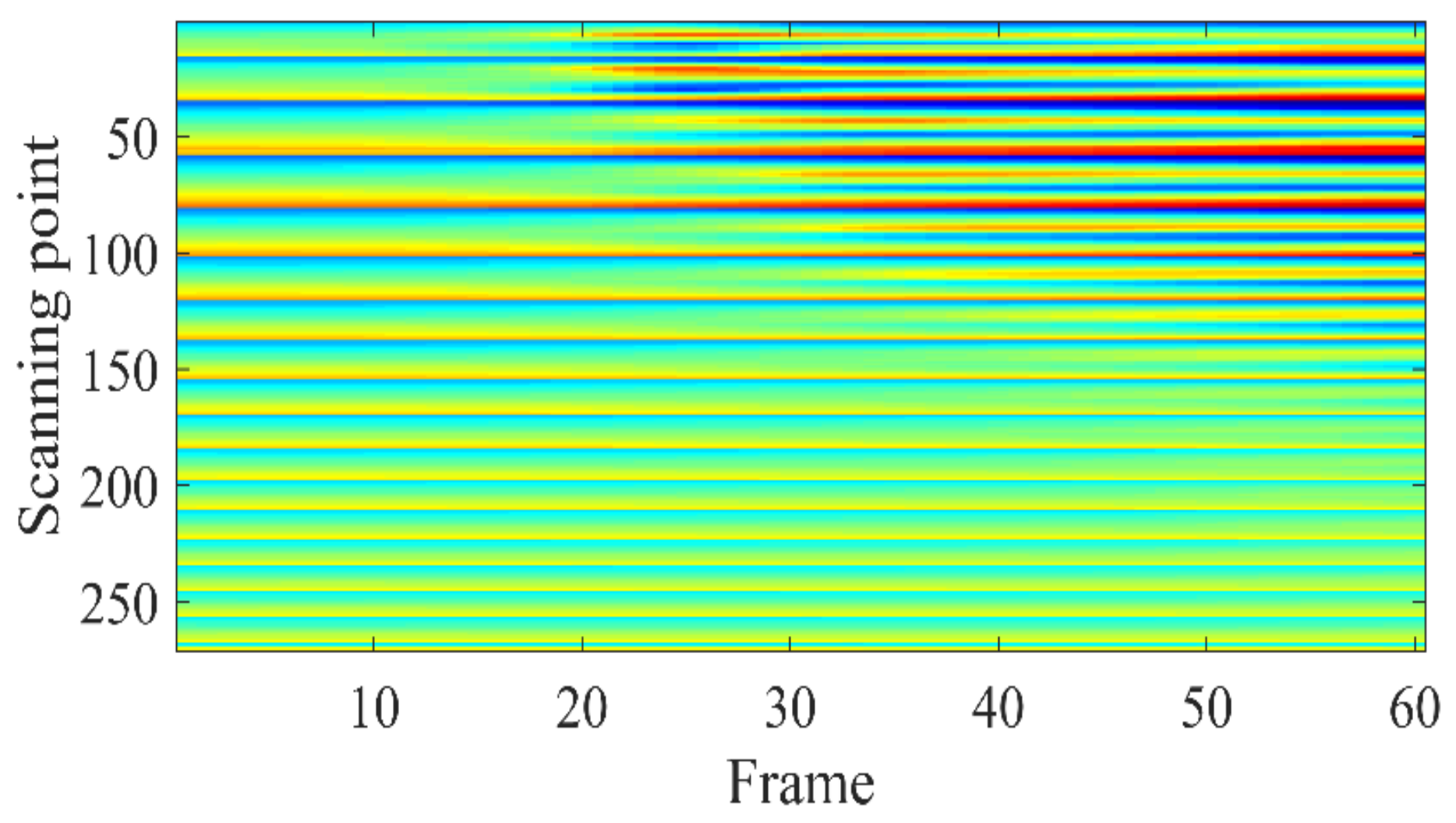
The key to matrix completion is to exploit the correlations of the radial velocities in the spatial and temporal domain.
Figure 4a shows the fully sampled radial velocity map calculated from 60 successive frames of wind field. The corresponding singular values are shown in
Figure 4b, which shows that the fully sampled radial velocity matrix is rank deficient. Therefore, low-rank prior can be applied here for matrix completion, which solves the following problem as:
The classic Riemannian Optimisation [
23] method is used to solve Equation (11).
2.4. Summary of the Time-Resolved Dual-LiDAR Imaging
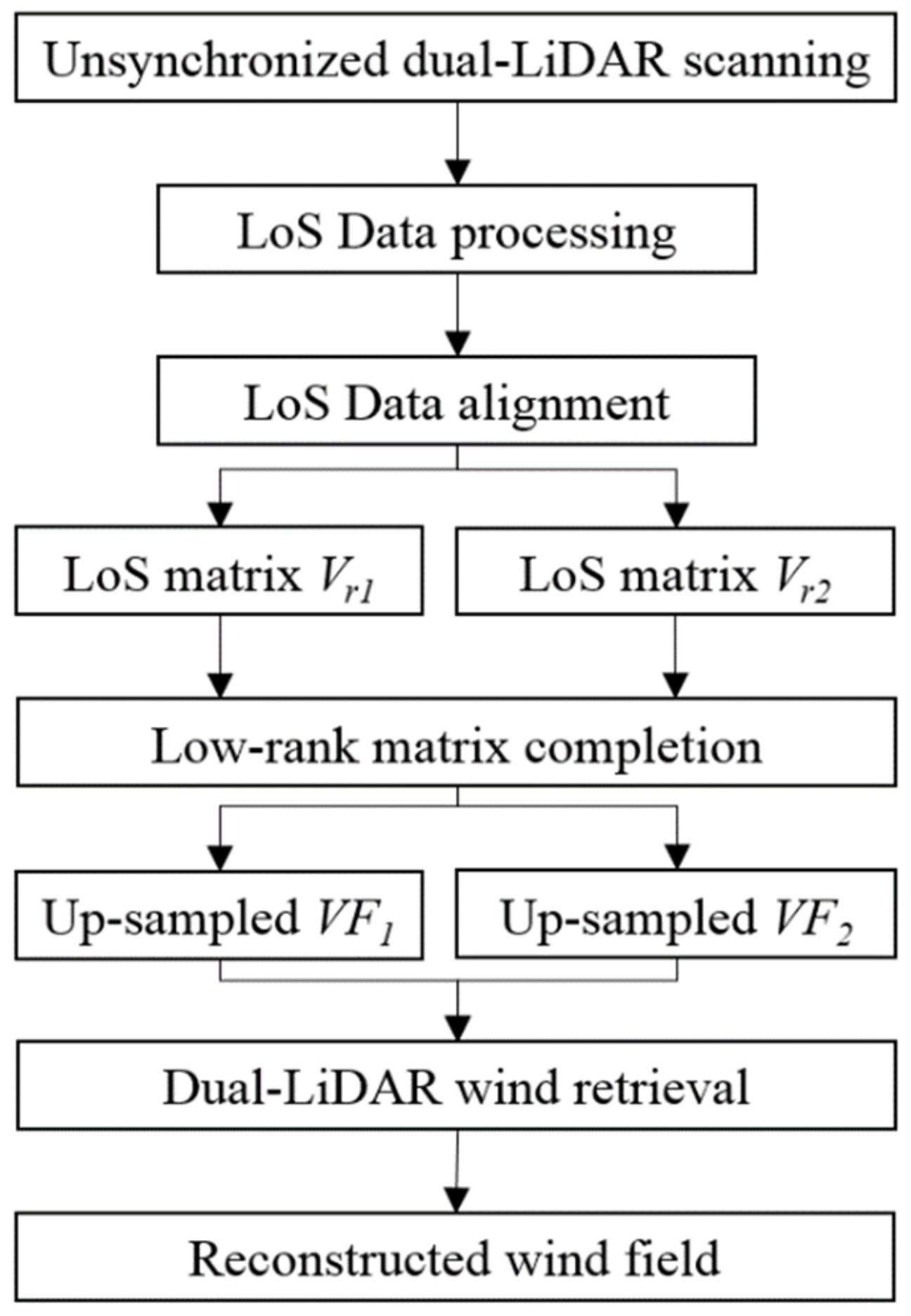
The flow chart of the time-resolved dual-LiDAR imaging system is shown in
Figure 5, and details of the flowchart are listed as follows:
The data collection step of the time-resolved dual-LiDAR imaging system. The region of interest is covered by the two PPI scans using the dual-LiDAR system. Then, the corresponding LoS data are collected;
Align the two LoS datasets into different time slots and scanning position to form two LoS velocity matrices with missing entities. Then, low-rank matrix completion is conducted to fill the missing entities in the Vr matrix;
Perform wind field retrieval from the up-sampled datasets based on the divergence-free regularised reconstruction algorithm.
Figure 5.
The flowchart of the time-resolved dual-LiDAR imaging system.
Figure 5.
The flowchart of the time-resolved dual-LiDAR imaging system.
4. Conclusions
In this paper, a novel dynamic wind retrieval method is developed to improve the temporal resolution of the unsynchronised dual-LiDAR system. By exploiting the temporal redundancy information of the LiDAR LoS data of successive frames, a reduced number of LiDAR scanning points is required for the 2D horizontal wind field retrieval with the help of an unsynchronised dual-LiDAR wind scan scheme and a low-rank data up-sampling and divergence-free regularised wind retrieval algorithm. Numerical simulation results show that the proposed method can improve the temporal resolution by a factor of eight.
However, the improvement of the temporal resolution relies on the redundancy of LiDAR data between successive frames. Therefore, the performance of the proposed method is largely data dependent. Some of the parameters such as the up-sampling ratio may not be optimal for all different wind fields, and the wind retrieval accuracy may also vary for different cases. Future work should consider the adaptive up-sampling ratio and advanced LoS data up-sampling algorithm for specific applications.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}