
Development of an Integrated Lightweight Multi-Rotor UAV Payload for Atmospheric Carbon Dioxide Mole Fraction Measurements

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. UAV Platform
2.2. Sensors
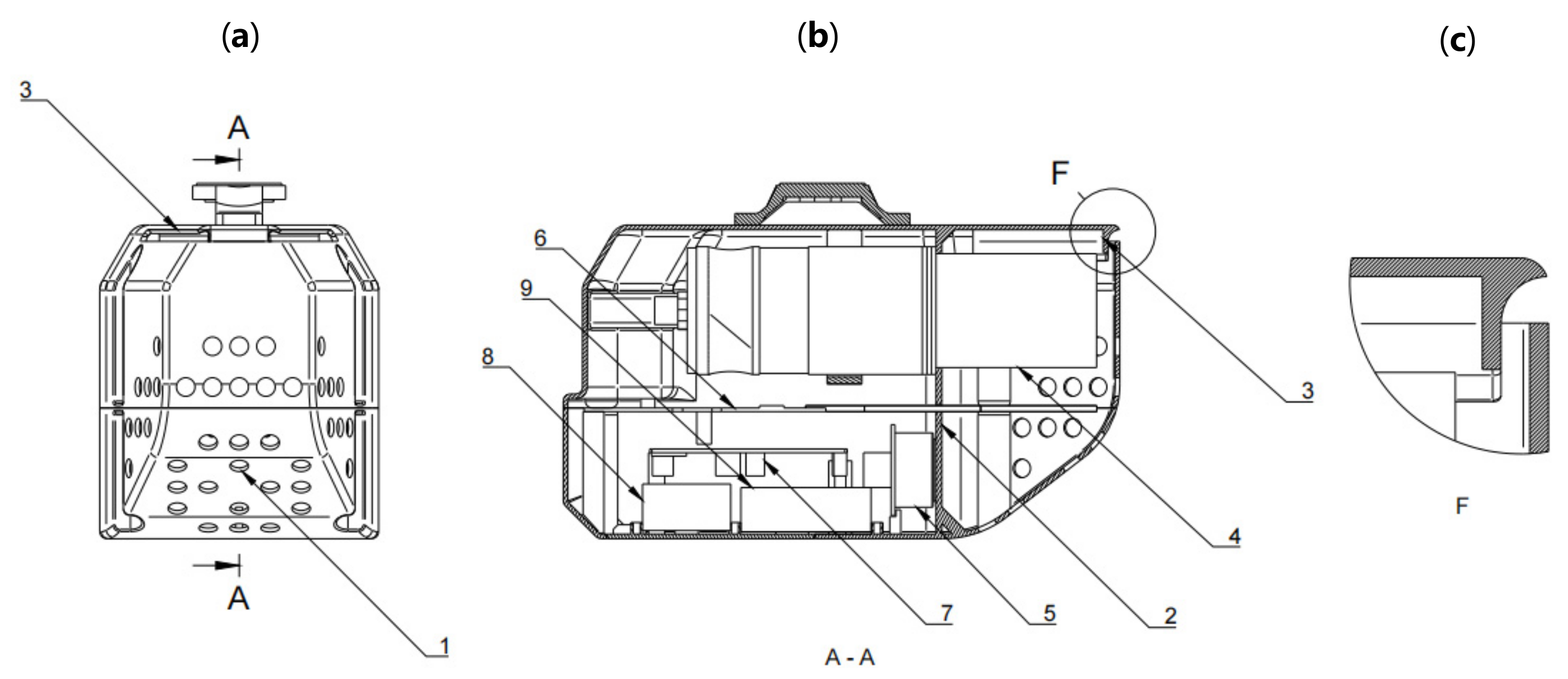
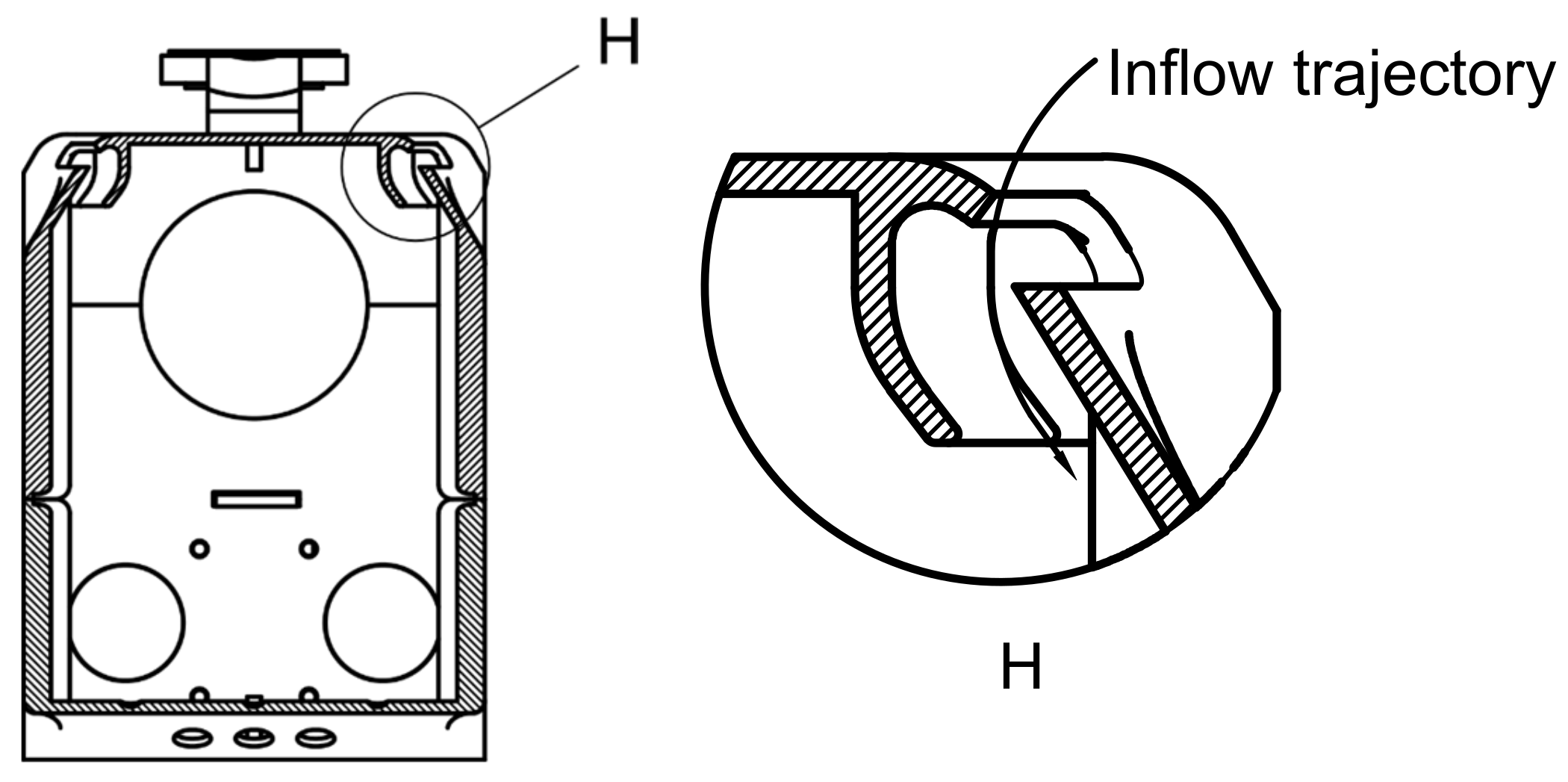
2.3. Integrated Payload
3. Results
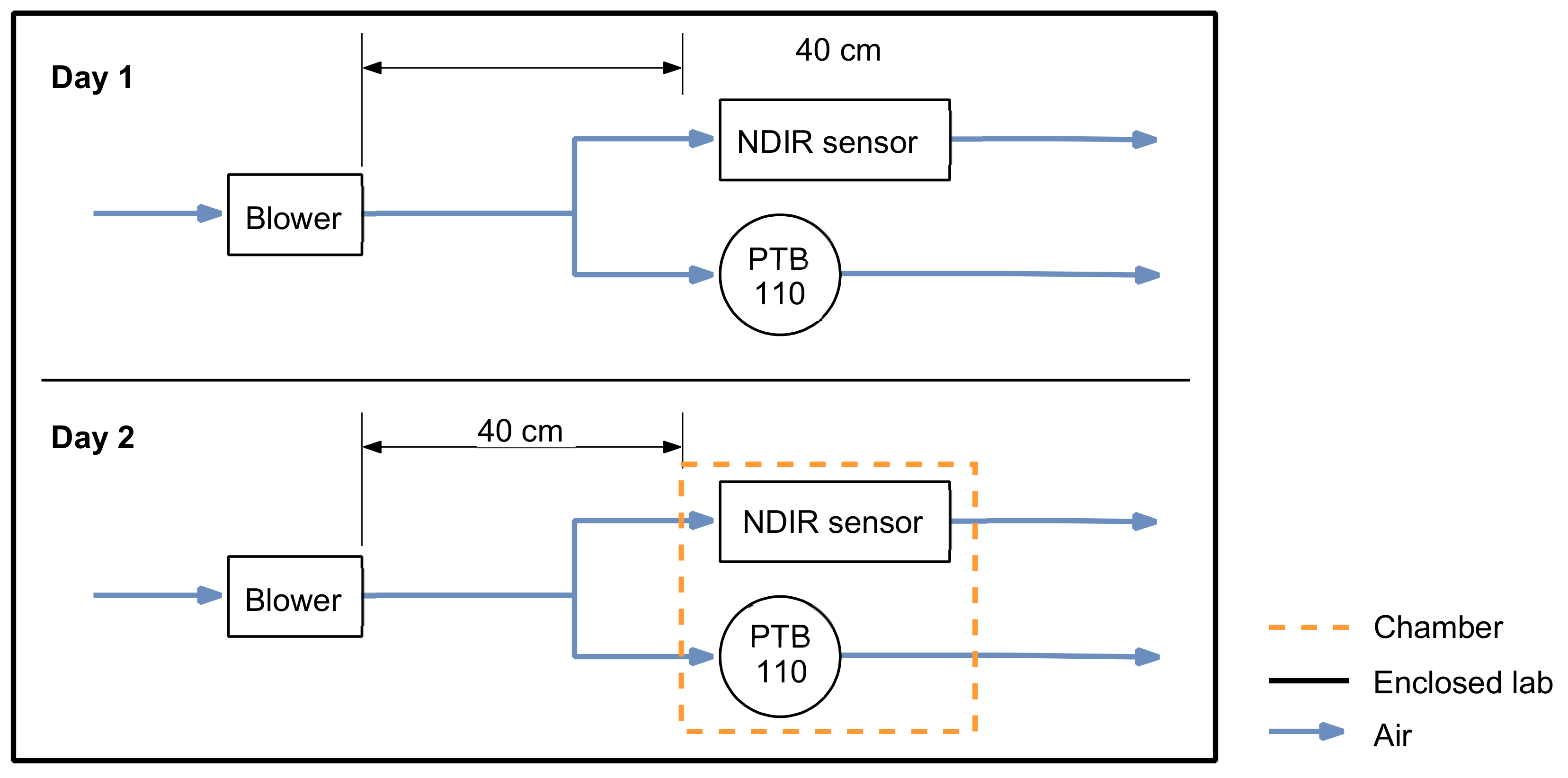
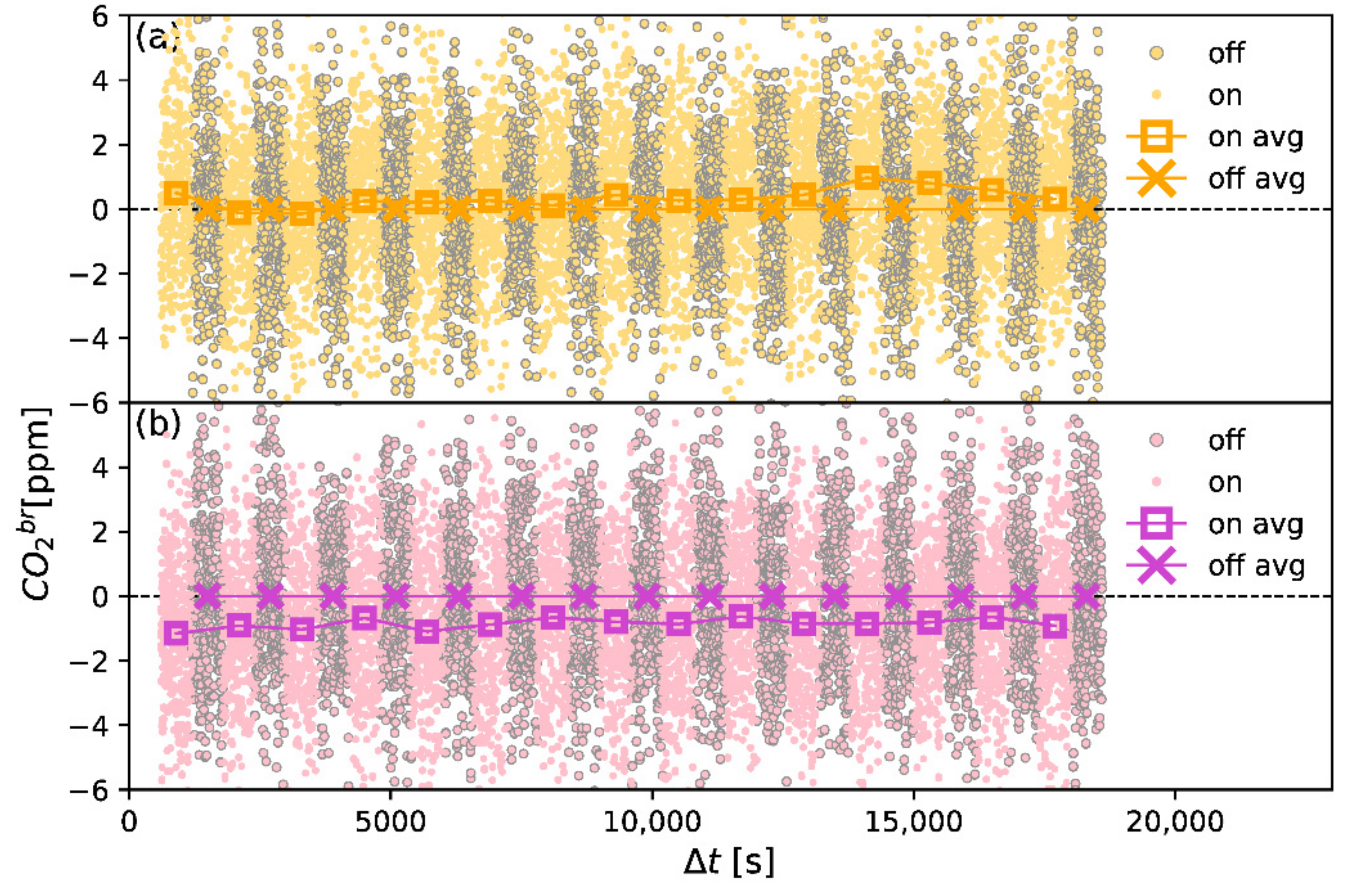
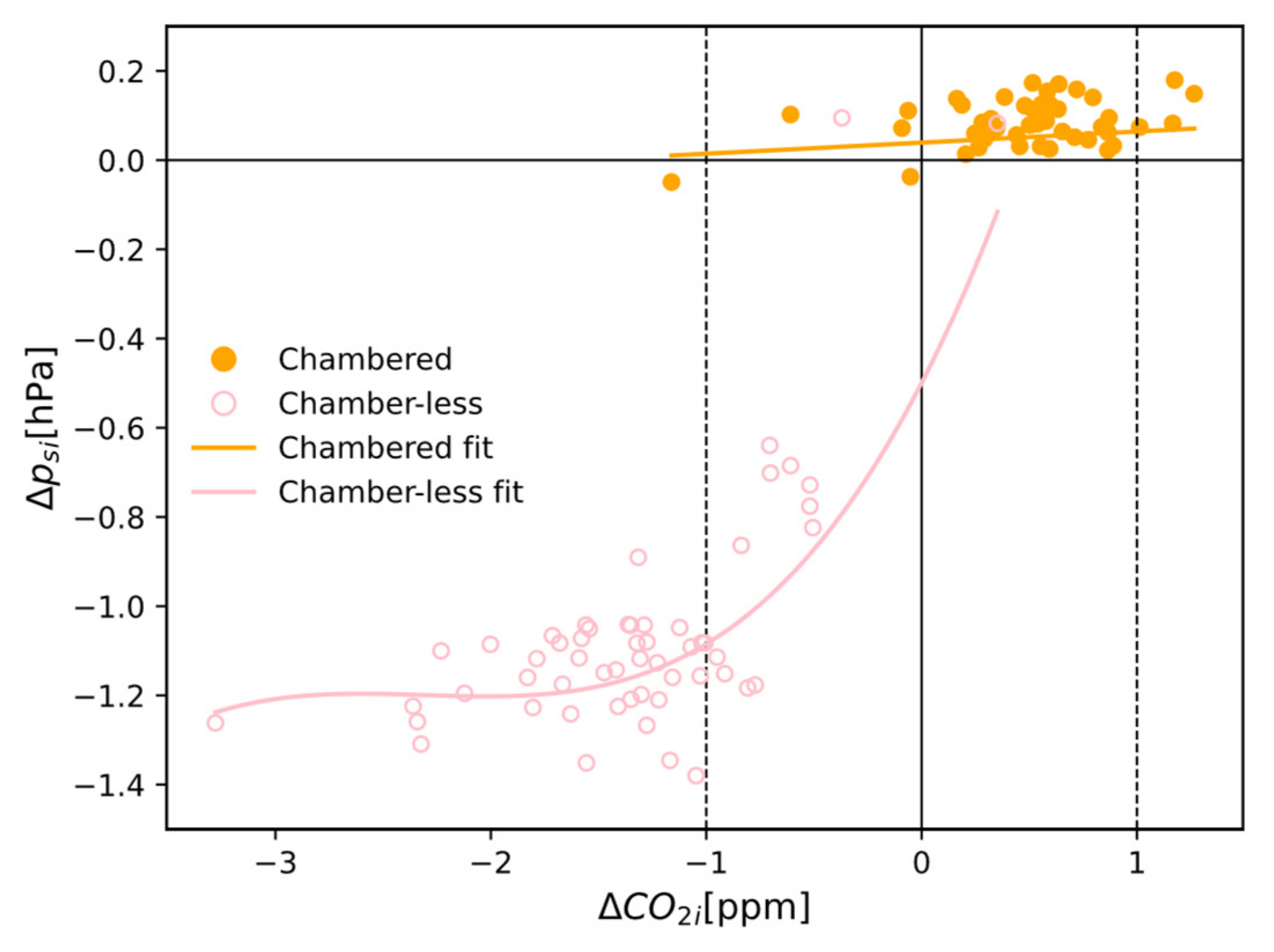
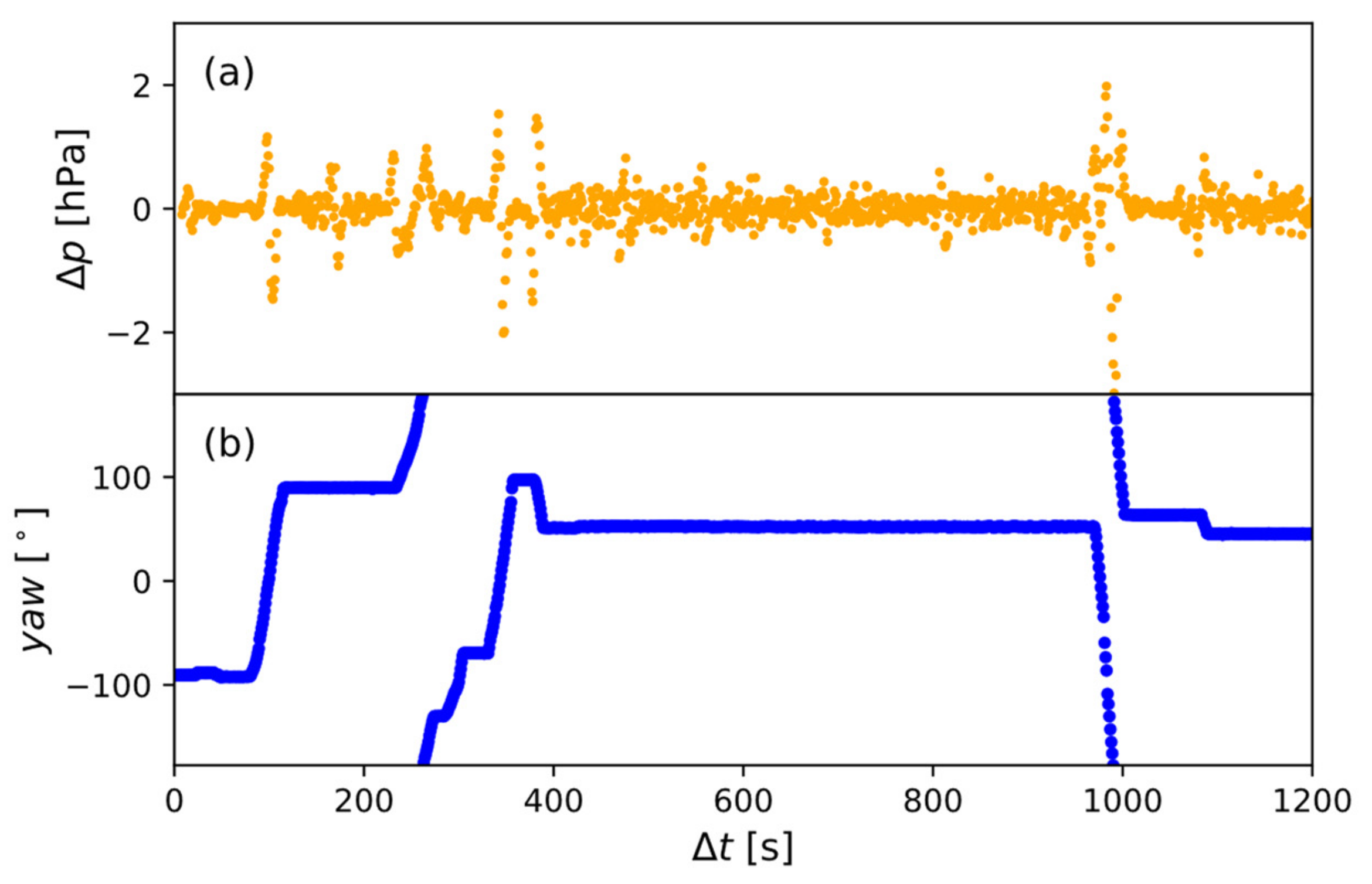
3.1. Test for Deriving Rotor Downwash Sensitivity
3.2. Lower Boundary Layer Profile Data Collection and Analysis
3.2.1. Test Location
3.2.2. Flight Campaign
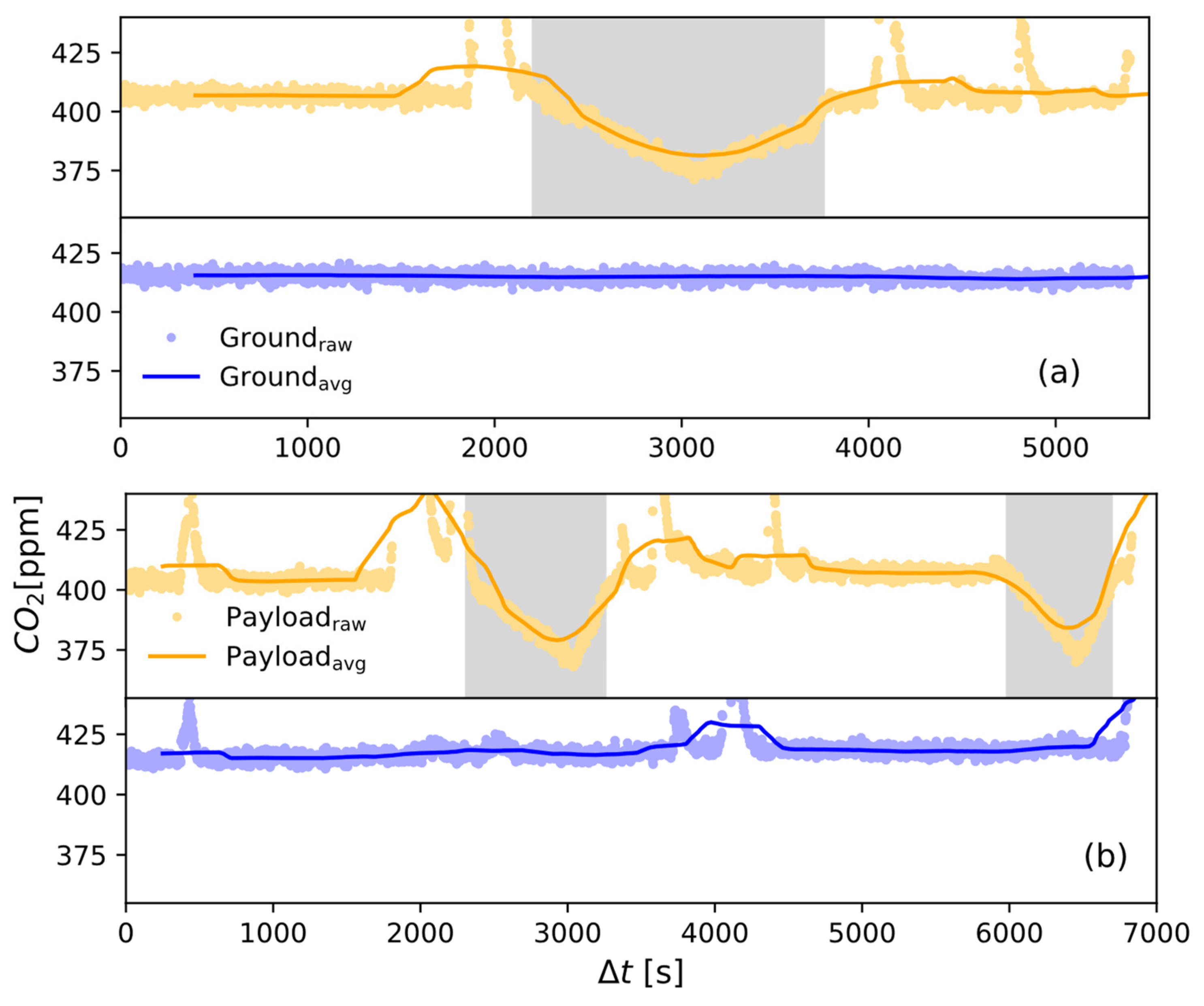
3.2.3. Synchronous Measurement on the Surface
3.2.4. Data Processing
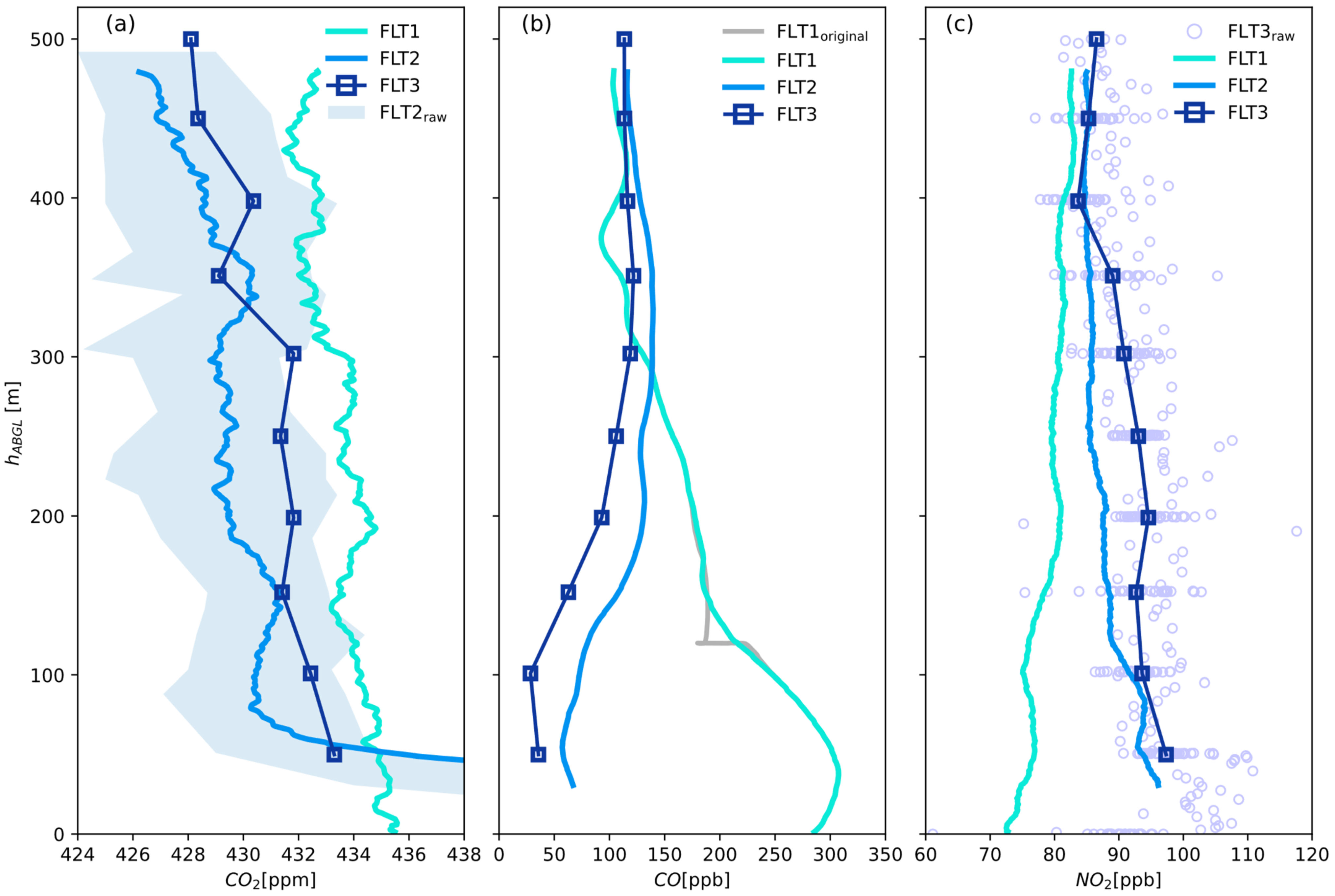
3.2.5. Profile Analysis
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arias, P.A.; Bellouin, E.N.; Coppola, R.G.; Jones, G.; Krinner, J.; Marotzke, V.; Naik, M.D.; Palmer, G.-K.; Plattner, J. Technical Summary. In Climate Change 2021: The Physical Science Basis; Masson-Delmotte, V., Zhai, P.A., Pirani, S.L.C., Péan, C., Berger, S., Caud, N., Chen, Y., Goldfarb, L., Gomis, M.I., Huang, M., et al., Eds.; Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2021. [Google Scholar]
- Canadell, J.G.; Monteiro, P.M.S.; Costa, M.H.; da Cunha, L.C.; Cox, P.M.; Eliseev, A.V.; Henson, M.; Ishii, S.; Jaccard, C.K.; Lohila, A.; et al. Global Carbon and other Biogeochemical Cycles and Feedbacks. In Climate Change 2021: The Physical Science Basis; Masson-Delmotte, V., Zhai, P., Pirani, A., Connors, S.L., Péan, C., Berger, S., Caud, N., Chen, Y., Goldfarb, L., Gomis, M.H.M.I., Eds.; Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2021. [Google Scholar]
- GCP. Science Framework and Implementation. Earth System Science Partnership; Josep, R.D., Canadell, G., Kathy Hibbard, M.R.O.Y., Eds.; GCP: Canberra, Australia, 2003; p. 69. [Google Scholar]
- IPCC. 2006 IPCC Guidelines for National Greenhouse Gas Inventories; Buendia, L., Ngara, T., Tanabe, K., Eds.; IGES: Kanagawa, Japan, 2006. [Google Scholar]
- Liu, J.J.; Bowman, K. A method for independent validation of surface fluxes from atmospheric inversion: Application to CO2. Geophys. Res. Lett. 2016, 43, 3502–3508. [Google Scholar] [CrossRef]
- Tans, P.P.; Fung, I.Y.; Takahashi, T. Observational Contrains on the Global Atmospheric CO2 Budget. Science 1990, 247, 1431–1438. [Google Scholar] [CrossRef]
- Yang, D.; Liu, Y.; Boesch, H.; Yao, L.; Di Noia, A.; Cai, Z.; Lu, N.; Lyu, D.; Wang, M.; Wang, J.; et al. A New TanSat XCO2 Global Product towards Climate Studies. Adv. Atmos. Sci. 2021, 38, 8–11. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Che, K.; Cai, Z.; Yang, D.; Wu, L. Satellite remote sensing of greenhouse gases:Progress and trends. J. Remote Sens. 2021, 25, 53–64. [Google Scholar]
- Reuter, M.; Bovensmann, H.; Buchwitz, M.; Borchardt, J.; Krautwurst, S.; Gerilowski, K.; Lindauer, M.; Kubistin, D.; Burrows, J.P. Development of a small unmanned aircraft system to derive CO2 emissions of anthropogenic point sources. Atmos. Meas. Tech. 2021, 14, 153–172. [Google Scholar] [CrossRef]
- Andersen, T.; Scheeren, B.; Peters, W.; Chen, H. A UAV-based active AirCore system for measurements of greenhouse gases. Atmos. Meas. Tech. 2018, 11, 2683–2699. [Google Scholar] [CrossRef]
- Tuzson, B.; Graf, M.; Ravelid, J.; Scheidegger, P.; Kupferschmid, A.; Looser, H.; Morales, R.P.; Emmenegger, L. A compact QCL spectrometer for mobile, high-precision methane sensing aboard drones. Atmos. Meas. Tech. 2020, 13, 4715–4726. [Google Scholar] [CrossRef]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N.; et al. Near-Field Characterization of Methane Emission Variability from a Compressor Station Using a Model Aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef] [PubMed]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and integration of a solar powered unmanned aerial vehicle and a wireless sensor network to monitor greenhouse gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef] [PubMed]
- Kunz, M.; Lavric, J.V.; Gerbig, C.; Tans, P.; Neff, D.; Hummelgård, C.; Martin, H.; Rödjegård, H.; Wrenger, B.; Heimann, M. COCAP: A carbon dioxide analyser for small unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 1833–1849. [Google Scholar] [CrossRef]
- Luo, B.; Meng, Q.-H.; Wang, J.-Y.; Ma, S.-G. Simulate the aerodynamic olfactory effects of gas-sensitive UAVs: A numerical model and its parallel implementation. Adv. Eng. Softw. 2016, 102, 123–133. [Google Scholar] [CrossRef]
- Do, S.; Lee, M.; Kim, J.-S. The Effect of a Flow Field on Chemical Detection Performance of Quadrotor Drone. Sensors 2020, 20, 3262. [Google Scholar] [CrossRef] [PubMed]
- Yang, F.; Xue, X.; Zhang, L.; Sun, Z. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar]
- Hakkarainen, J.; Ialongo, I.; Tamminen, J. Direct space-based observations of anthropogenic CO2 emission areas from OCO-2. Geophys. Res. Lett. 2016, 43, 11400–11406. [Google Scholar] [CrossRef]
- Reuter, M.; Buchwitz, M.; Schneising, O.; Krautwurst, S.; O’Dell, C.W.; Richter, A.; Bovensmann, H.; Burrows, J.P. Towards monitoring localized CO2 emissions from space: Co-located regional CO2 and NO2 enhancements observed by the OCO-2 and S5P satellites. Atmos. Chem. Phys. 2019, 19, 9371–9383. [Google Scholar] [CrossRef]
- Lei, Y.; Cheng, M. Aerodynamic Performance of Hex-Rotor UAV Considering the Horizontal Airflow. Appl. Sci. 2019, 9, 4797. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight (g) | Power Consumption (w) | Flight Time Reduction (min) | |
|---|---|---|---|
| Vaisala CARBON3060S | 300 | <3.5 | 3.85 |
| Intermet iMet-4 RSB | 62 | <0.29 | 0.79 |
| Alphasense NO2-B43F | 20 | <0.025 | 0.25 |
| Alphasense CO-B4 | 20 | <0.025 | 0.25 |
| Data collection PCB | 45 | 0.48 | 0.58 |
| 18650 Lithium-ion Battery | 145 | - | 1.86 |
| CR123A Lithium-ion Battery | 33 | - | 0.42 |
| Enclosure | 323 | - | 4.13 |
| Other components | 149 | - | 1.91 |
| Total | 1097 | <4.32 | 14.04 |
| Flight 1 | Flight 2 | Flight 3 | |
|---|---|---|---|
| Method | Continuous Ascent | Continuous Ascent | Level hover Ascent |
| Take-off time | 16:06:38 | 19:08:23 1 | 20:09:36 |
| Reached 500 m at | 16:20:20 | 19:20:12 | 20:17:08 |
| Landing time | 16:32:46 | 19:24:24 | 20:21:43 |
| Vertical speed | <1 m/s | <1m/s | N/A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Yang, D.; Liu, Y.; Cai, Z.; Yao, L.; Che, K.; Ren, X.; Bi, Y.; Yi, Y.; Wang, J.; et al. Development of an Integrated Lightweight Multi-Rotor UAV Payload for Atmospheric Carbon Dioxide Mole Fraction Measurements. Atmosphere 2022, 13, 855. https://doi.org/10.3390/atmos13060855
Zhao T, Yang D, Liu Y, Cai Z, Yao L, Che K, Ren X, Bi Y, Yi Y, Wang J, et al. Development of an Integrated Lightweight Multi-Rotor UAV Payload for Atmospheric Carbon Dioxide Mole Fraction Measurements. Atmosphere. 2022; 13(6):855. https://doi.org/10.3390/atmos13060855
Chicago/Turabian StyleZhao, Tonghui, Dongxu Yang, Yi Liu, Zhaonan Cai, Lu Yao, Ke Che, Xiaoyu Ren, Yongheng Bi, You Yi, Jing Wang, and et al. 2022. "Development of an Integrated Lightweight Multi-Rotor UAV Payload for Atmospheric Carbon Dioxide Mole Fraction Measurements" Atmosphere 13, no. 6: 855. https://doi.org/10.3390/atmos13060855
APA StyleZhao, T., Yang, D., Liu, Y., Cai, Z., Yao, L., Che, K., Ren, X., Bi, Y., Yi, Y., Wang, J., & Zhu, S. (2022). Development of an Integrated Lightweight Multi-Rotor UAV Payload for Atmospheric Carbon Dioxide Mole Fraction Measurements. Atmosphere, 13(6), 855. https://doi.org/10.3390/atmos13060855