
Automated Recognition of Macro Downburst Using Doppler Weather Radar


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Doppler Weather Radar Data Preprocessing
2.1. Remove Isolated Points
2.2. Fourier Interpolation Algorithm Improves the Resolution of Reflectivity Products
2.3. Filter
- Median filter
- 2.
- Moving average filter
2.4. Two-Dimensional Multi-Channel Algorithm Reduces Velocity Ambiguity in Radial Velocity Products
2.5. Radial Velocity Interpolation
3. The Principle of Automatic Identification Algorithm for Downburst Area
3.1. Radial Velocity Binarization
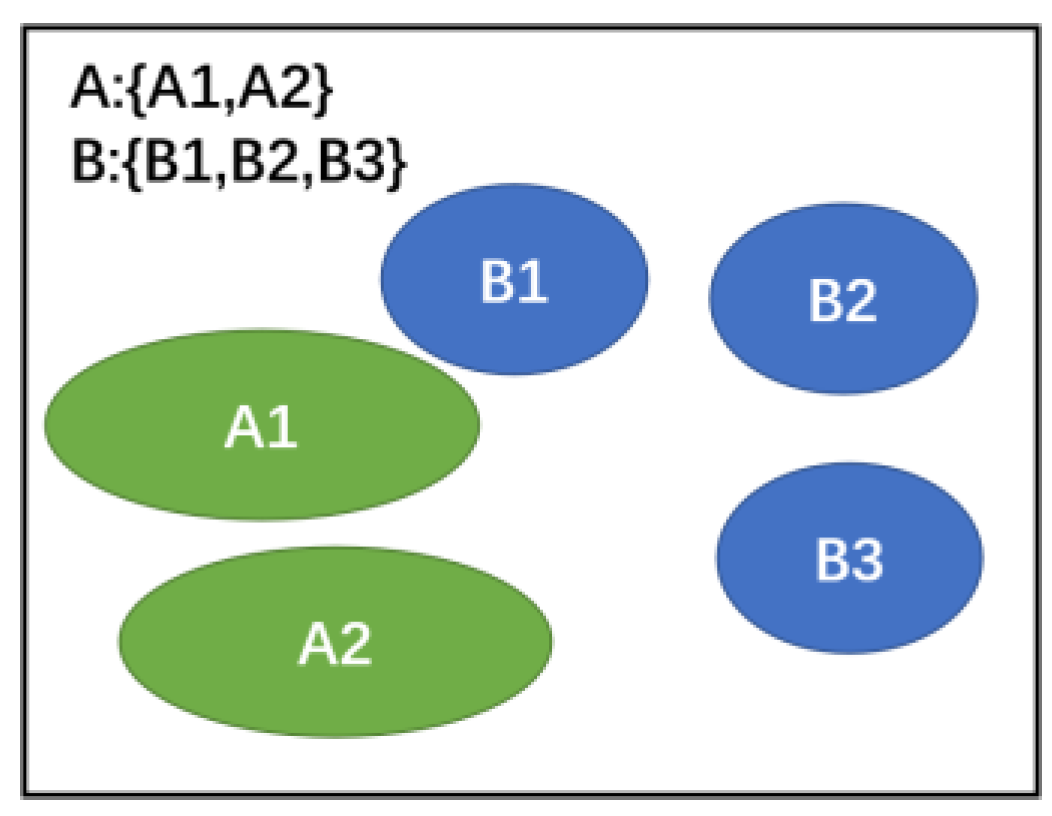
3.2. Eight-Neighborhood Method for Matching Positive and Negative Velocity Connected Regions
- The distance between the positive and negative velocity and the center of mass of the connected area is less than 5 km;
- The number of pixels in the connected area of positive and negative velocity is greater than 10.
3.3. Zero Doppler Velocity Line Extraction Method
- Traverse the radial velocity in the detection range. When the absolute value of the radial velocity ≤ 0.5 m/s, mark this point as a zero Doppler velocity suspected point.
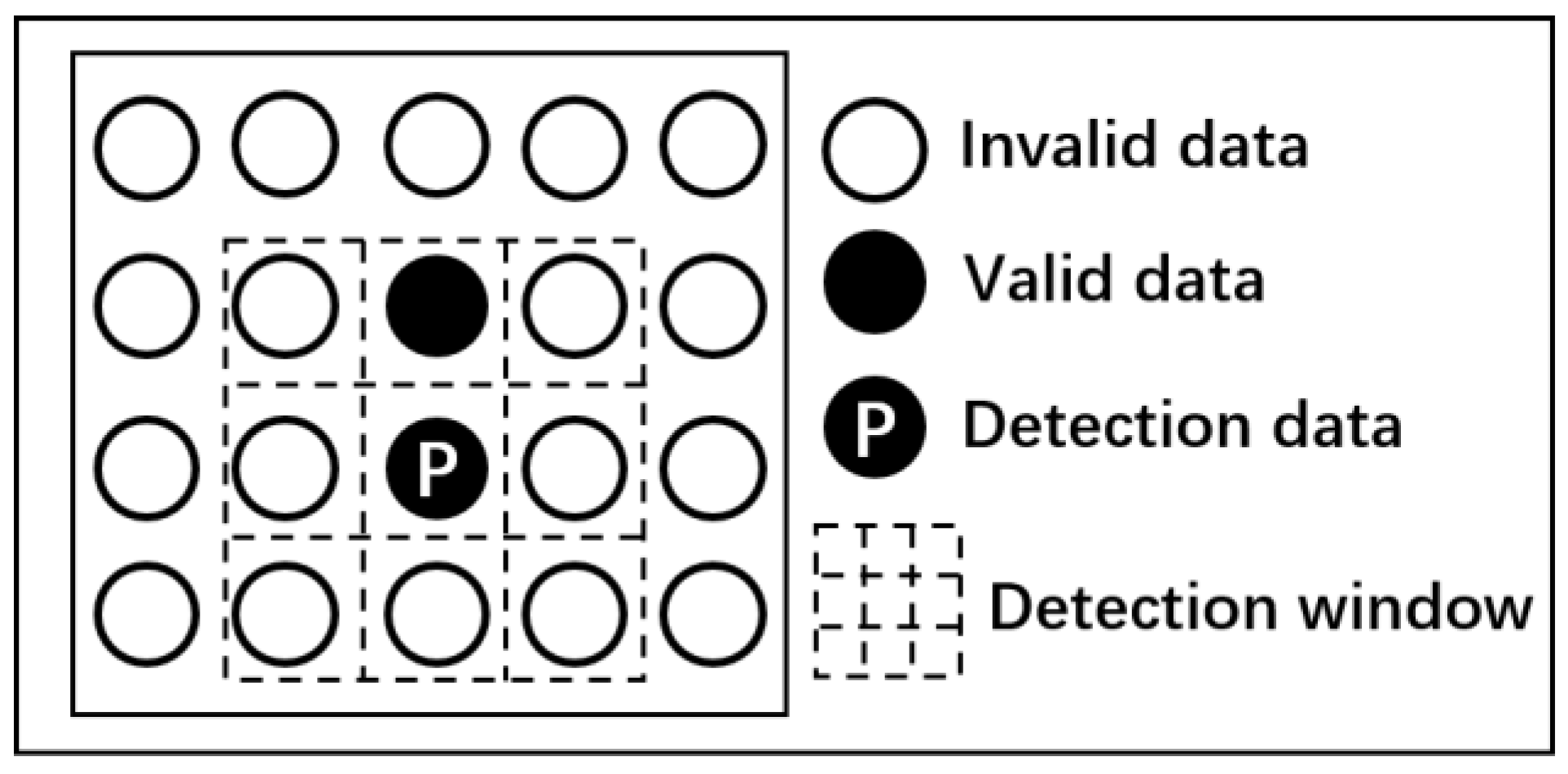
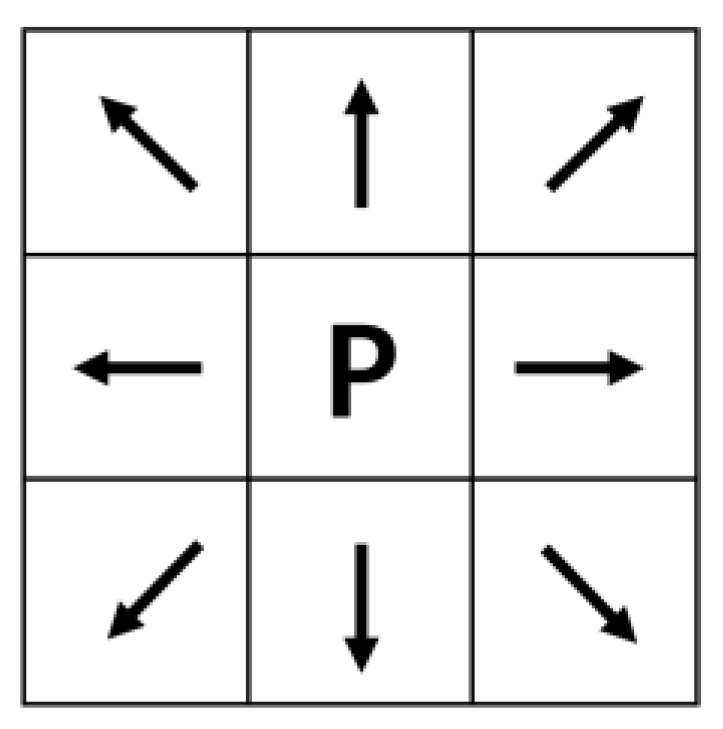
- Within the detection range, use a 3 × 3 window to traverse every suspected point of zero Doppler velocity and record the number of data that satisfy the absolute value of the radial velocity ≤ 0.5 m/s.
- When the total value of the 3 × 3 window of the zero Doppler velocity suspected point meets the condition is ≥2, the zero Doppler velocity suspected point is marked as the zero Doppler velocity point.
3.4. Recognition Method of Downburst Area Center
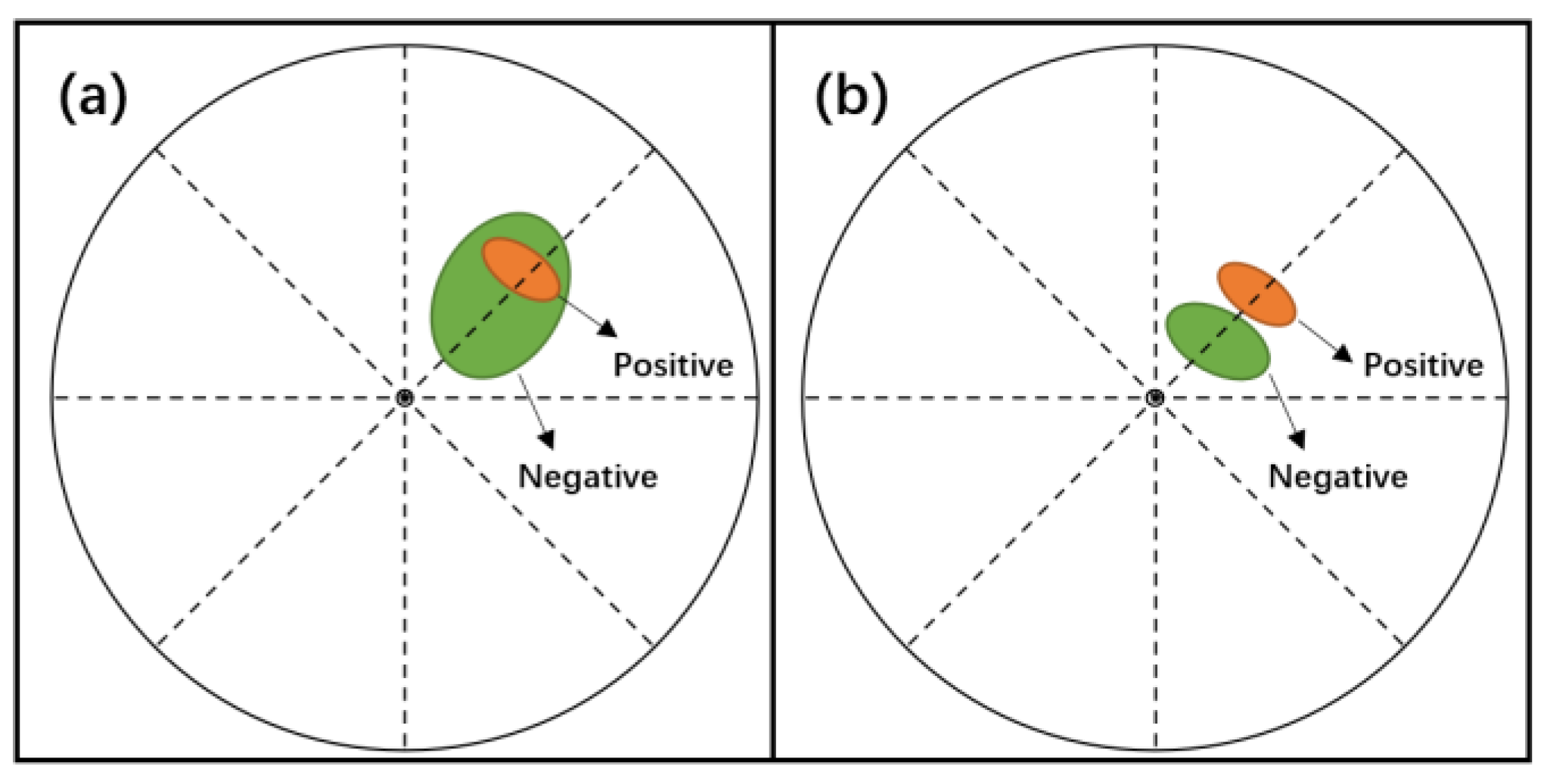
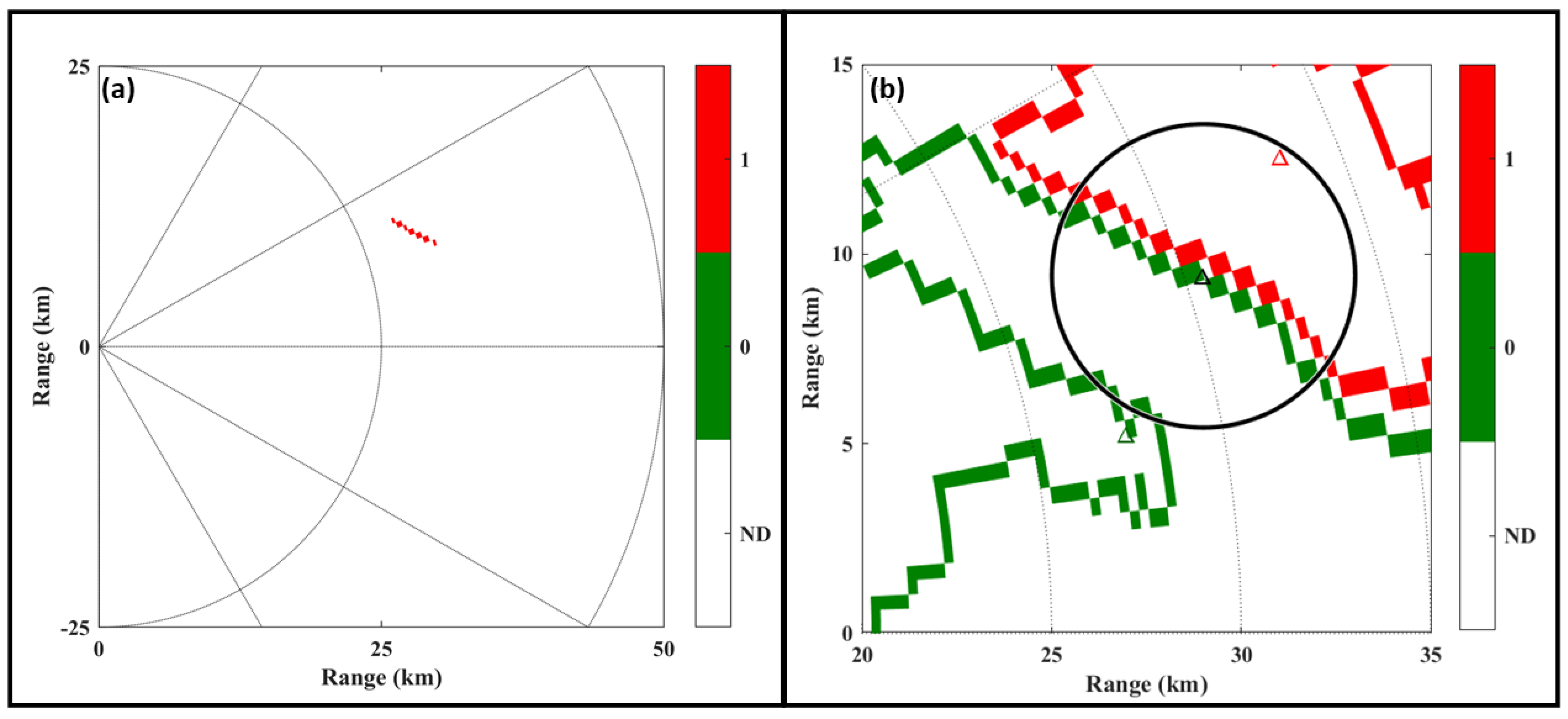
- As shown in Figure 6, the maximum and minimum values of a pair of positive and negative velocities versus regional azimuth and distance libraries are used as the search range of velocity extremes.
- 2.
- In the search range, find the maximum value of positive velocity and the minimum value of negative velocity, and record the value and coordinates.
- 3.
- Take the absolute value of the maximum value of the positive velocity and the minimum value of the negative velocity. If one of the absolute values is ≥ 10 m/s [25], proceed to step (4); otherwise, the positive and negative velocity have no downburst center.
- 4.
- Calculate the sum of the squares of the distances between all points on the zero Doppler velocity line and the maximum and minimum positive and negative velocity values. As shown in Figure 7, the suspected point at the center of the downburst area is the one where the sum of the squares of the distance is the smallest.
- 5.
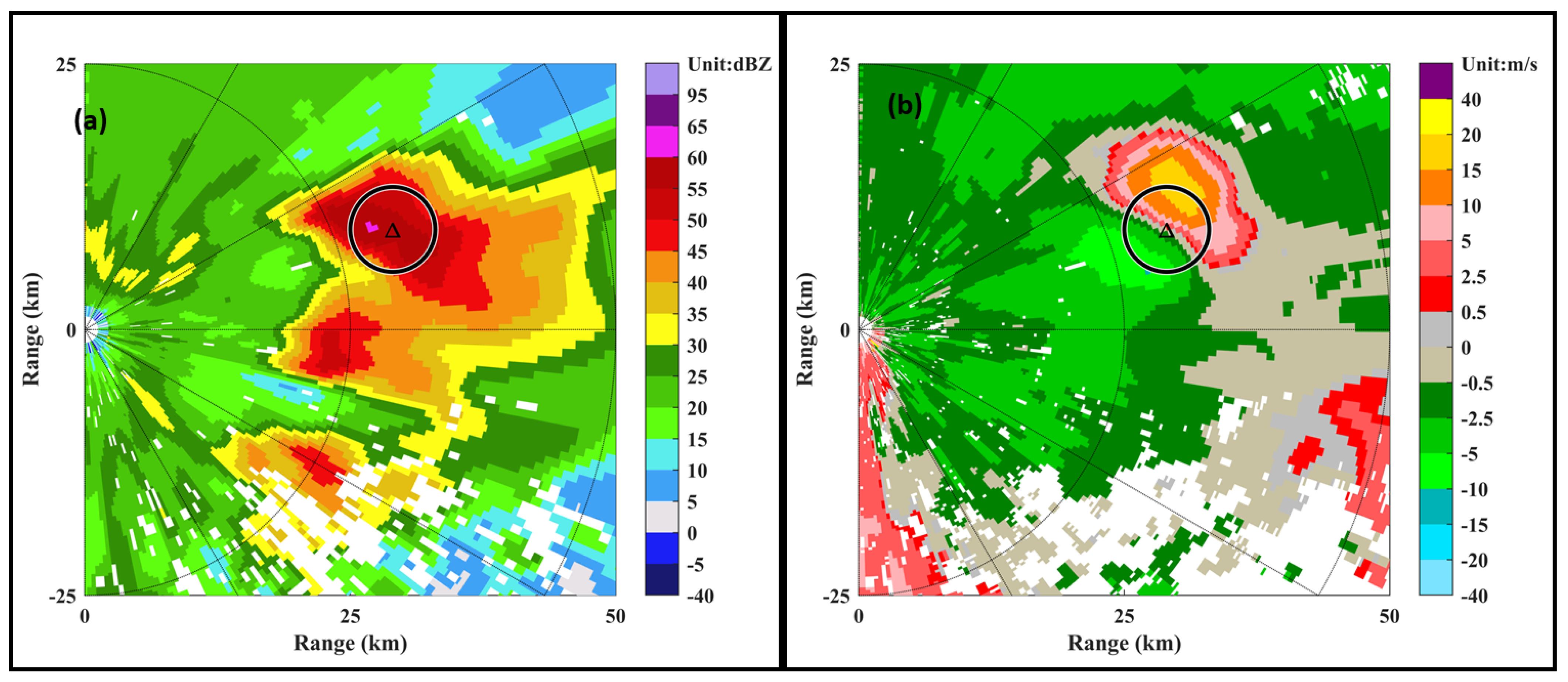
- When the reflectivity of the suspected point at the center of the downburst area is greater than 35 dBZ, mark this point as the center point of the downburst area.
- 6.
- If there are multiple pairs of positive and negative velocities, repeat step (1) to step (5).
4. Case Analysis
4.1. Recognition of Downburst on 25 July 2006
4.1.1. Weather Process Description
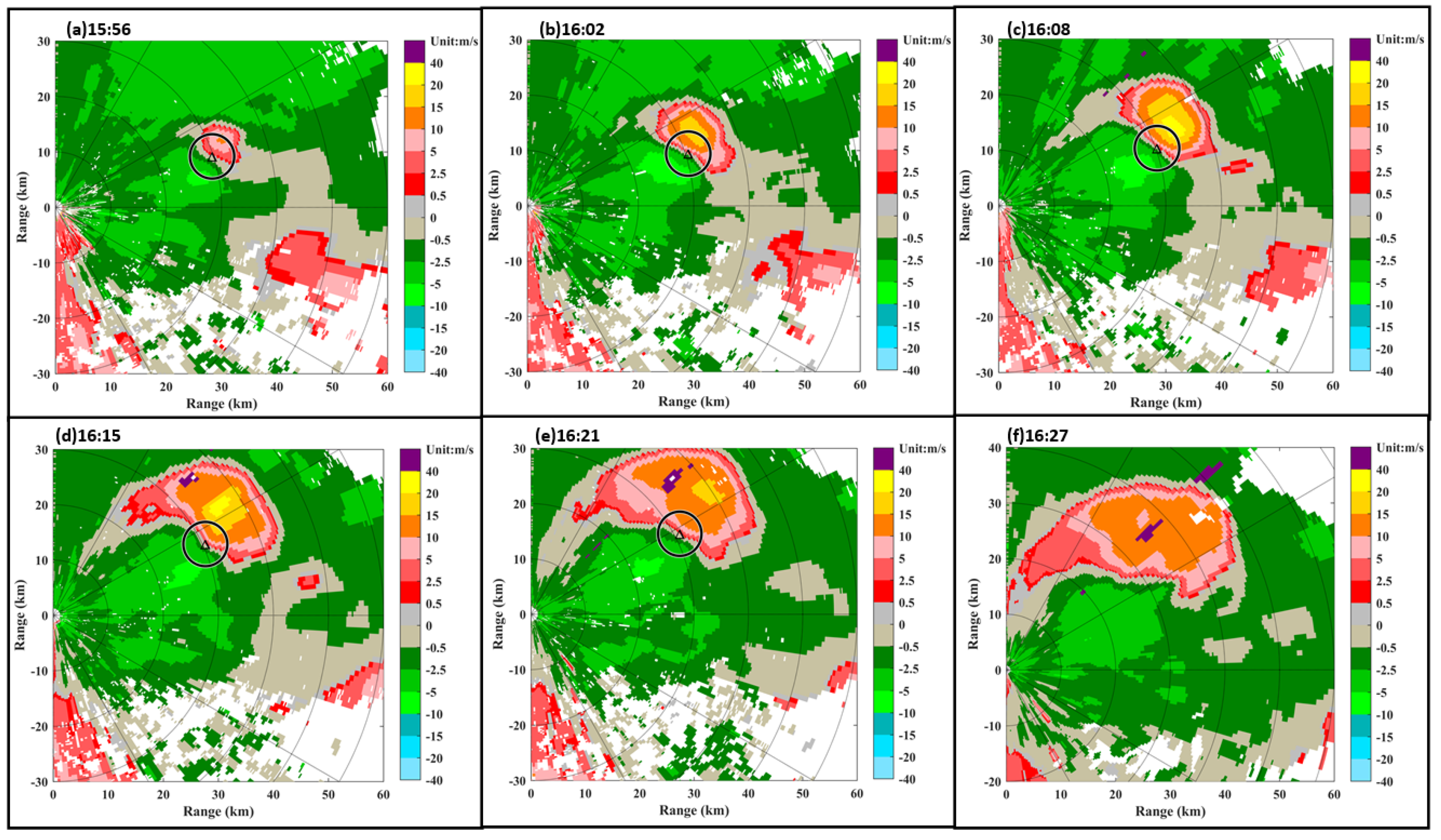
4.1.2. Recognition of Downburst at 16:02 on 25 July 2006
4.1.3. Identification of Downburst during This Process
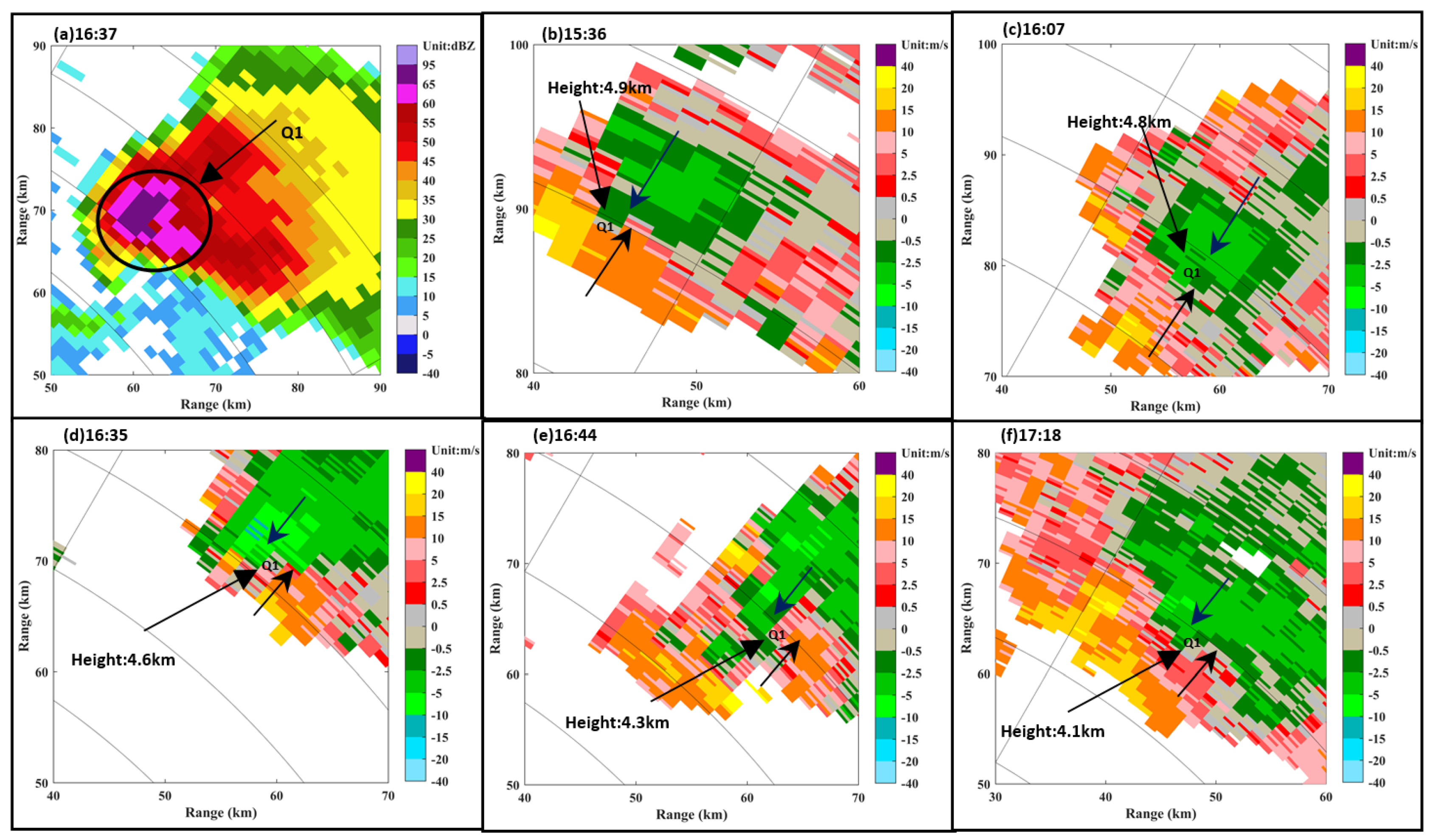
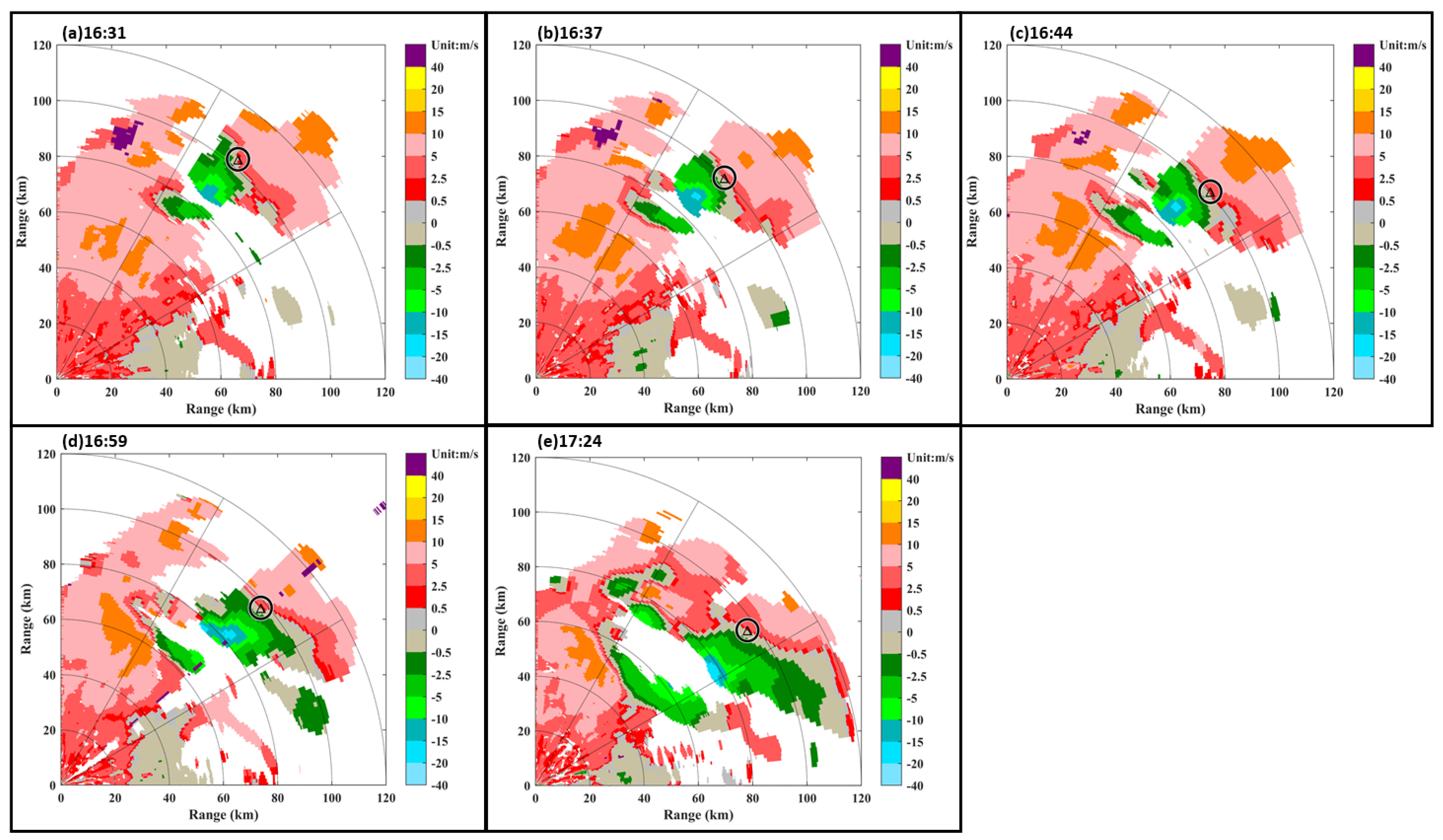
4.2. Recognition of Downbursts on 27 June 2009
4.2.1. Weather Process Description
4.2.2. Identification of Downburst during This Process
4.3. Algorithm Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fujita, T.T. Tornadoes and Downbursts in the Context of Generalized Planetary Scales. J. Atmos. Sci. 1981, 38, 1511–1534. [Google Scholar] [CrossRef]
- Fujita, T.T.; Satellite and Mesometeorology Research Project. The Downburst: Microburst and Macroburst: Report of Projects NIMROD and JAWS; Satellite and Mesometeorology Research Project, Department of the Geophysical Sciences, University of Chicago: Chicago, IL, USA, 1985; 122p. [Google Scholar]
- Xiao, Y.J.; Wang, J.; Wang, Z.B.; Leng, L.; Fu, Z.K. A Downburst Nowcasting Method Based on Observations of S-Band New Generation Weather Radar. Meteorol. Mon. 2021, 47, 919–931. [Google Scholar]
- Merritt, M.W. Automated Detection of Microburst Windshear for Terminal Doppler Weather Radar. Proc. SPIE 1988, 846, 61–69. [Google Scholar]
- Roberts, R.D.; Wilson, J.W. A Proposed Microburst Nowcasting Procedure Using Single-Doppler Radar. J. Appl. Meteorol. 1989, 28, 285–303. [Google Scholar] [CrossRef]
- Wolfson, M.M.; Delanoy, R.L.; Forman, B.E.; Hallowell, R.G.; Pawlak, M.L.; Smith, P.D. Automated Microburst Wind-Shear Prediction. Linc. Lab. J. 1994, 7, 399–426. [Google Scholar]
- Smith, T.M.; Elmore, K.L.; Dulin, S.A. A Damaging Downburst Prediction and Detection Algorithm for the WSR-88D. Weather Forecast. 2004, 19, 240–250. [Google Scholar] [CrossRef]
- Tuttle, J.D.; Bringi, V.N.; Orville, H.D.; Kopp, F.J. Multiparameter Radar Study of a Microburst: Comparison with Model Results. J. Atmos. Sci. 1989, 46, 601–620. [Google Scholar] [CrossRef][Green Version]
- Herzegh, P.H.; Jameson, A.R. Observing Precipitation through Dual-Polarization Radar Measurements. Bull. Am. Meteorol. Soc. 1992, 73, 1365–1376. [Google Scholar] [CrossRef]
- Kumjian, M.R.; Khain, A.P.; Benmoshe, N.; Ilotoviz, E.; Ryzhkov, A.V.; Phillips, V.T.J. The Anatomy and Physics of ZDR Columns: Investigating a Polarimetric Radar Signature with a Spectral Bin Microphysical Model. J. Appl. Meteorol. Climatol. 2014, 53, 1820–1843. [Google Scholar] [CrossRef]
- Kuster, C.M.; Bowers, B.R.; Carlin, J.T.; Schuur, T.J.; Brogden, J.W.; Toomey, R.; Dean, A. Using KDP Cores as a Downburst Precursor Signature. Weather Forecast. 2021, 36, 1183–1198. [Google Scholar] [CrossRef]
- Yu, X.D.; Zhang, A.M.; Zheng, Y.Y.; Fang, C.; Zhu, H.F.; Wu, L.L. Doppler Radar Analysis on a Series of Downburst Events. J. Appl. Meteorol. Sci. 2006, 17, 385–393. [Google Scholar]
- Zhao, D.Y.; Bai, J. Review of Researches on Identification and Warning of Downbursts with Doppler Radar. Meteorol. Sci. Technol. 2007, 35, 631–636. [Google Scholar]
- Tao, L.; Dai, J.H. Research on Automatic Detection Algorithm of Downburst. Plateau Meteorol. 2011, 30, 784–797. [Google Scholar]
- Du, M.Y.; Xiao, Y.J.; Wu, T. Identification of Downbursts Based on WSR-88D Doppler Weather Radar Images. Meteorol. Sci. Technol. 2015, 43, 368–372. [Google Scholar]
- Zhao, Z.Y. A Forecast Method of Downburst Based on Doppler Weather Radar. Ph.D. Thesis, Tianjin University, Tianjin, China, 2018. [Google Scholar]
- Sun, J.; Xiao, Y.J.; Leng, L. Damaging downbursts warning algorithm using the Doppler weather radar scanning data. J. Nat. Disasters 2019, 28, 118–126. [Google Scholar]
- Wang, X.; Min, J.Z.; Zhang, L.X.; Ding, L.D.; Cai, S.X. Method of downburst warning based on radar data extrapolation and feature recognition. J. Meteorol. Sci. 2019, 39, 377–385. [Google Scholar]
- Jiao, P.C.; Wang, Z.H.; Chu, C.G.; Han, J.; Zhang, S.; Zhu, Y.Q. An interpolation method for weather radar data based on Fourier spectrum analysis. Plateau Meteorol. 2016, 35, 1683–1693. [Google Scholar]
- Zhang, J.; Wang, S. An Automated 2D Multipass Doppler Radar Velocity Dealiasing Scheme. J. Atmos. Ocean. Technol. 2006, 23, 1239–1248. [Google Scholar] [CrossRef]
- Cai, Q.; Yan, Q. Application study of automated 2D multipass Doppler radar velocity dealiasing scheme. J. Meteorol. Sci. 2009, 29, 625–632. [Google Scholar]
- The Documentation of Bwareaopen Is about Removing Small Objects from Binary Image. Available online: https://ww2.mathworks.cn/help/images/ref/bwareaopen.html?searchHighlight=bwareaopen&s_tid=srchtitle_bwareaopen_1 (accessed on 1 December 2021).
- Fujita, T.T. Objectives, operations, and results of Project NIMROD. In Proceedings of the 11th Conference on Severe Local Storms of the American Meteorological Society, Kansas City, MO, USA, 2–5 October 1979; pp. 259–266. [Google Scholar]
- Wilson, J.W.; Schreiber, W.E. Initiation of Convective Storms at Radar-Observed Boundary-Layer Convergence Lines. Mon. Weather Rev. 1986, 114, 2516–2536. [Google Scholar] [CrossRef]
- Wilson, J.W.; Roberts, R.D.; Kessinger, C.; Mccarthy, J. Microburst Wind Structure and Evaluation of Doppler Radar for Airport Wind Shear Detection. J. Clim. Appl. Meteorol. 1984, 23, 898–915. [Google Scholar] [CrossRef]
- Diao, X.G.; Zhao, Z.D.; Gao, H.J.; Jiang, P. Doppler Radar Echo Features of Three Downbursts. J. Meteorol. Mon. 2011, 37, 522–531. [Google Scholar]
- Ayindir, C.B. A novel nonlinear frequency modulated chirp signal for synthetic aperture radar and sonar imaging. J. Nav. Sci. Eng. 2015, 11, 68–81. [Google Scholar]
- Bayindir, C.; Frost, J.D.; Barnes, C.F. Assessment and Enhancement of SAR Noncoherent Change Detection of Sea-Surface Oil Spills. IEEE J. Ocean. Eng. 2017, 43, 211–220. [Google Scholar] [CrossRef]
- Zhuang, H.; Fan, H.; Deng, K.; Yu, Y. An improved neighborhood-based ratio approach for change detection in SAR images. Eur. J. Remote Sens. 2018, 51, 723–738. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Wang, H.; He, J.; Shi, Z.; Xie, C. Automated Recognition of Macro Downburst Using Doppler Weather Radar. Atmosphere 2022, 13, 672. https://doi.org/10.3390/atmos13050672
Wang X, Wang H, He J, Shi Z, Xie C. Automated Recognition of Macro Downburst Using Doppler Weather Radar. Atmosphere. 2022; 13(5):672. https://doi.org/10.3390/atmos13050672
Chicago/Turabian StyleWang, Xu, Hailong Wang, Jianxin He, Zhao Shi, and Chenghua Xie. 2022. "Automated Recognition of Macro Downburst Using Doppler Weather Radar" Atmosphere 13, no. 5: 672. https://doi.org/10.3390/atmos13050672
APA StyleWang, X., Wang, H., He, J., Shi, Z., & Xie, C. (2022). Automated Recognition of Macro Downburst Using Doppler Weather Radar. Atmosphere, 13(5), 672. https://doi.org/10.3390/atmos13050672