
Global Monitoring of Ionospheric Weather by GIRO and GNSS Data Fusion

 ,
,  , ,
, ,  , , ,
, , , 
 , and
, and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
1.1. Ionospheric Weather Monitoring with Ionosondes
1.2. Ionospheric Weather Monitoring Using GNSS
1.3. Requirements to Sensors for Ionospheric Weather Nowcast
2. GIRO and GNSS for Ionospheric Weather Nowcast
2.1. Ionospheric Weather Nowcast Using GIRO Ionosondes
2.2. Ionospheric Weather Nowcast Using GNSS Receiver Network
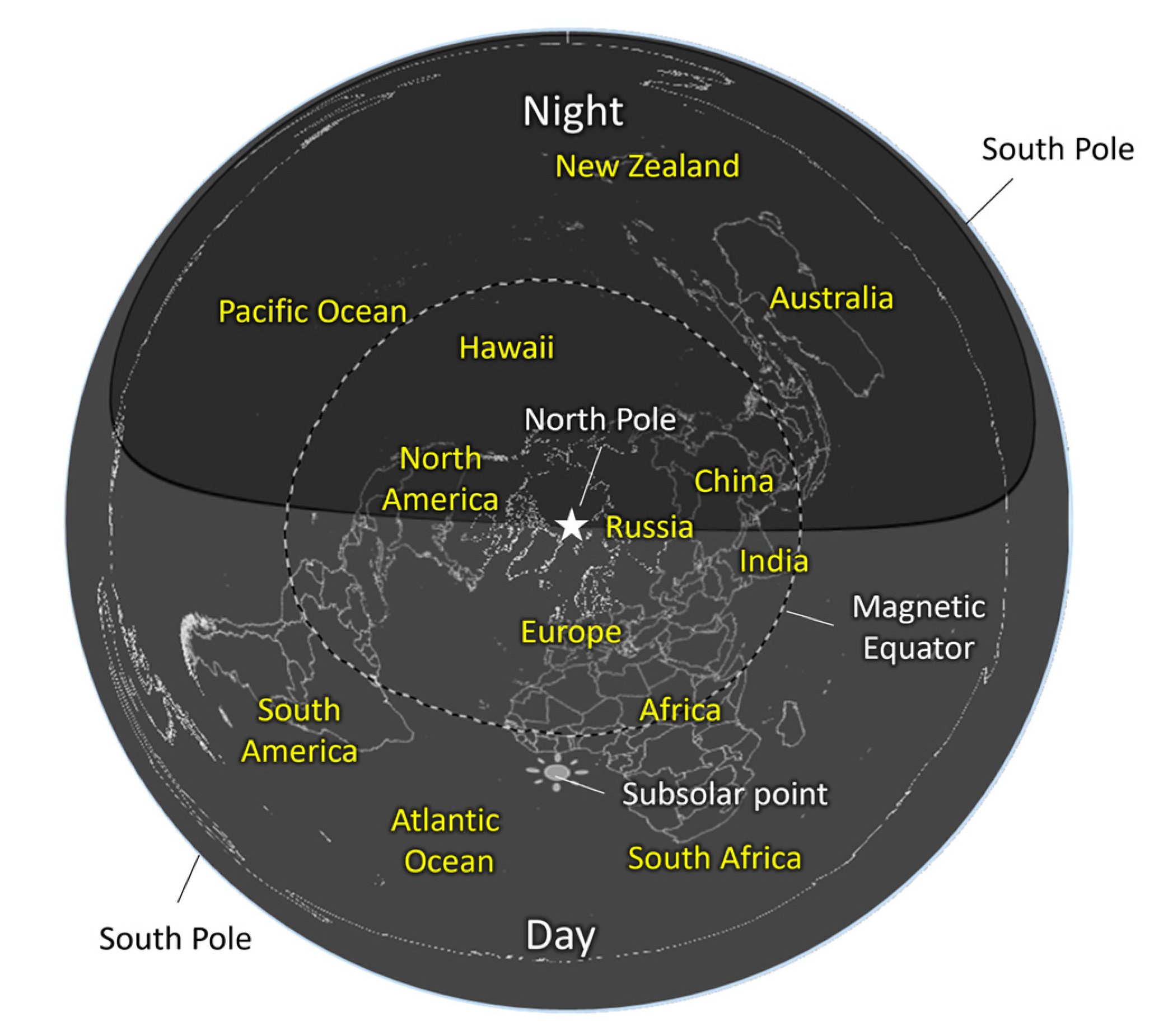
2.3. Anomaly Mapping Using Gleason Projection
2.4. GAMBIT: Cooperative GIRO and GNSS Nowcast
3. Technique Descriptions
3.1. GIRO-IRI Data Fusion
3.2. VTEC Maps by IGS/UWM/CAS
3.3. 2D Versus 3D Modeling of the Ionosphere
4. Fusing GIRO and GNSS Data
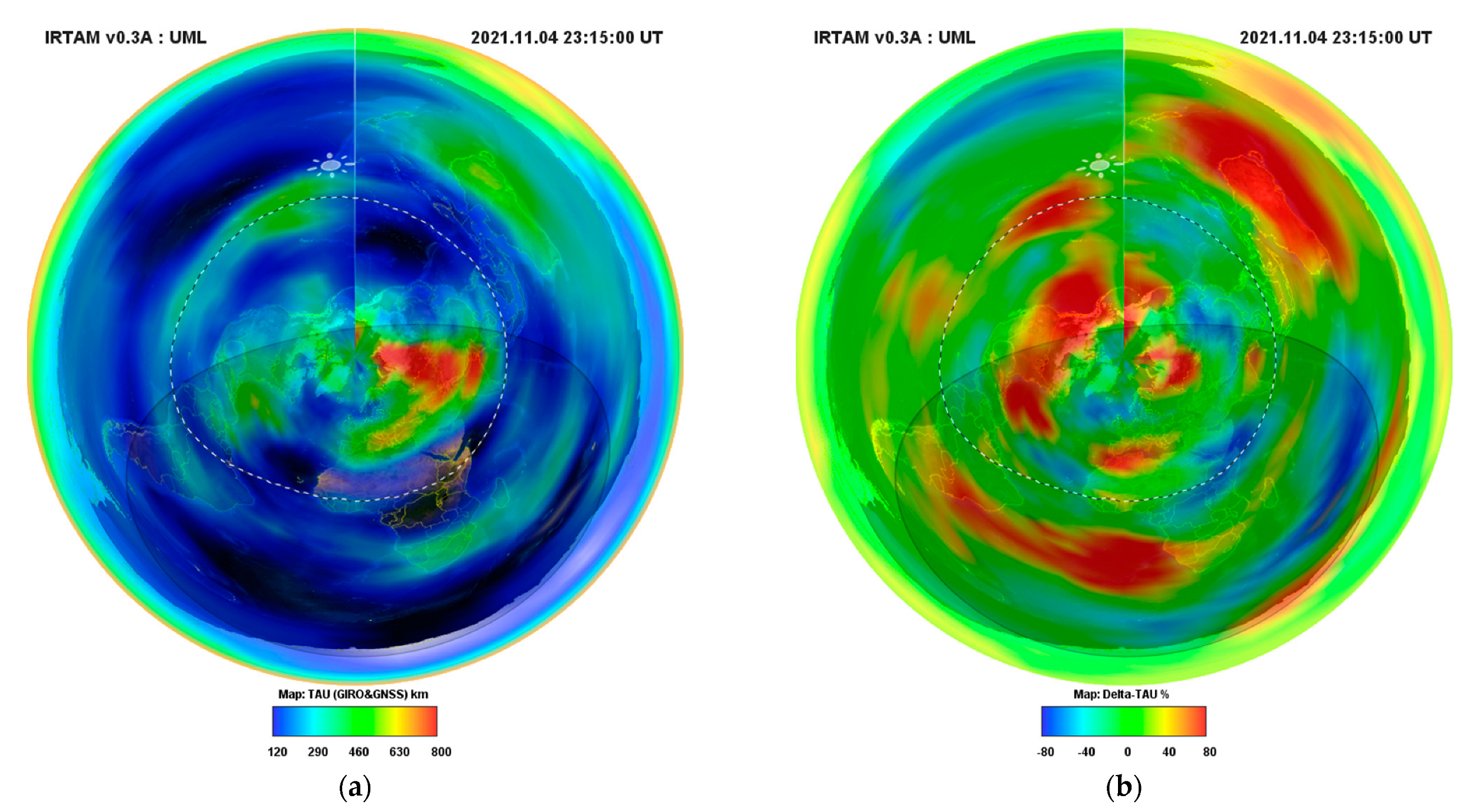
4.1. Equivalent Slab Thickness Computation
4.2. Importance of EST for Monitoring the Ionosphere
- τ has been linked to the neutral scale height Hn of the atmosphere [58] according to the relation τ = 4.13 Hn. This relation has been recently re-confirmed as valid, even though only for the α-Chapman function representation of the F2 layer of the ionosphere under strict assumptions [65] that have not been fully met in real life. The vertical distribution of the ionospheric plasma is instead driven by the plasma scale height Hp, which depends on the plasma temperature, ion composition, and other physical quantities [66]. Correspondingly, this relationship with Hn is now viewed as a benchmark [67].
- A rough estimate of the thermospheric temperature Tn can be obtained as a function of τ [68]: Tn = (τ + 250)/0.5.
- Statistical associations of τ with seasonal and solar activity variability are instrumental to understanding its relationship with the forcing from above. Global climatological and weather modeling [68,69] highlights good correlations of τ with solar heat input unless dominating plasma transport processes break the equilibrium conditions.
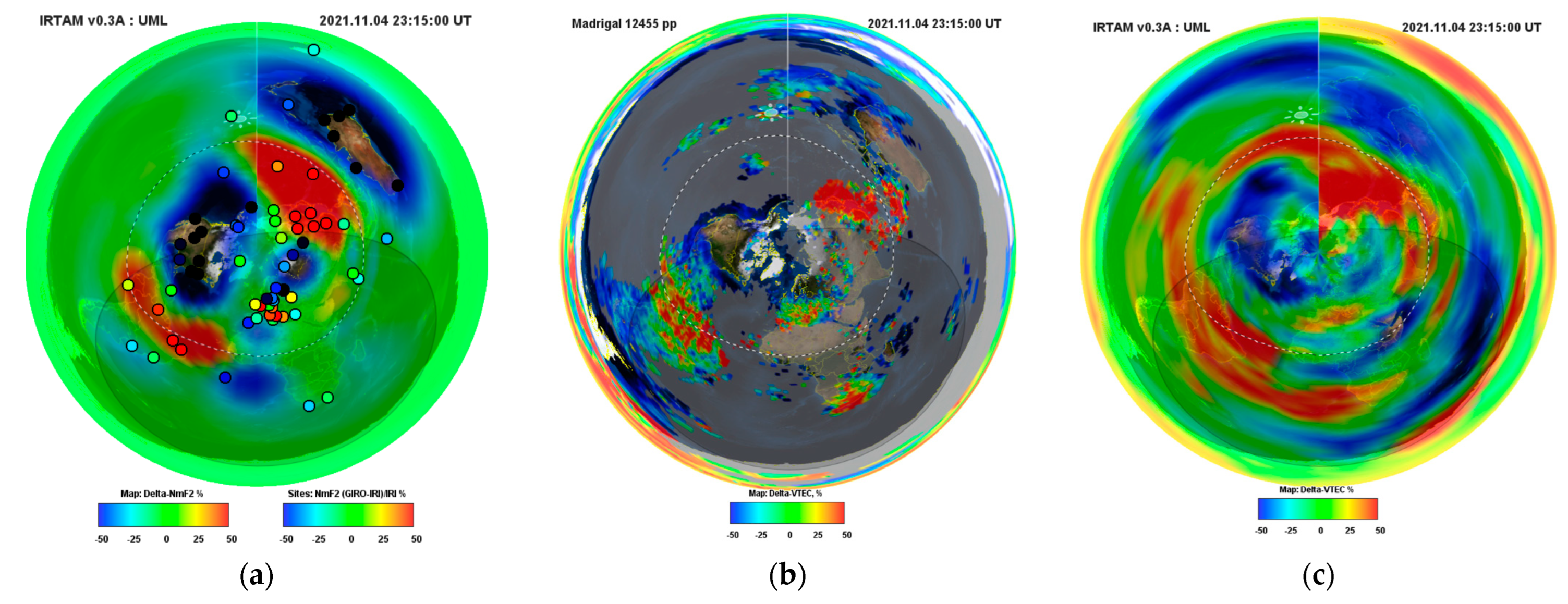
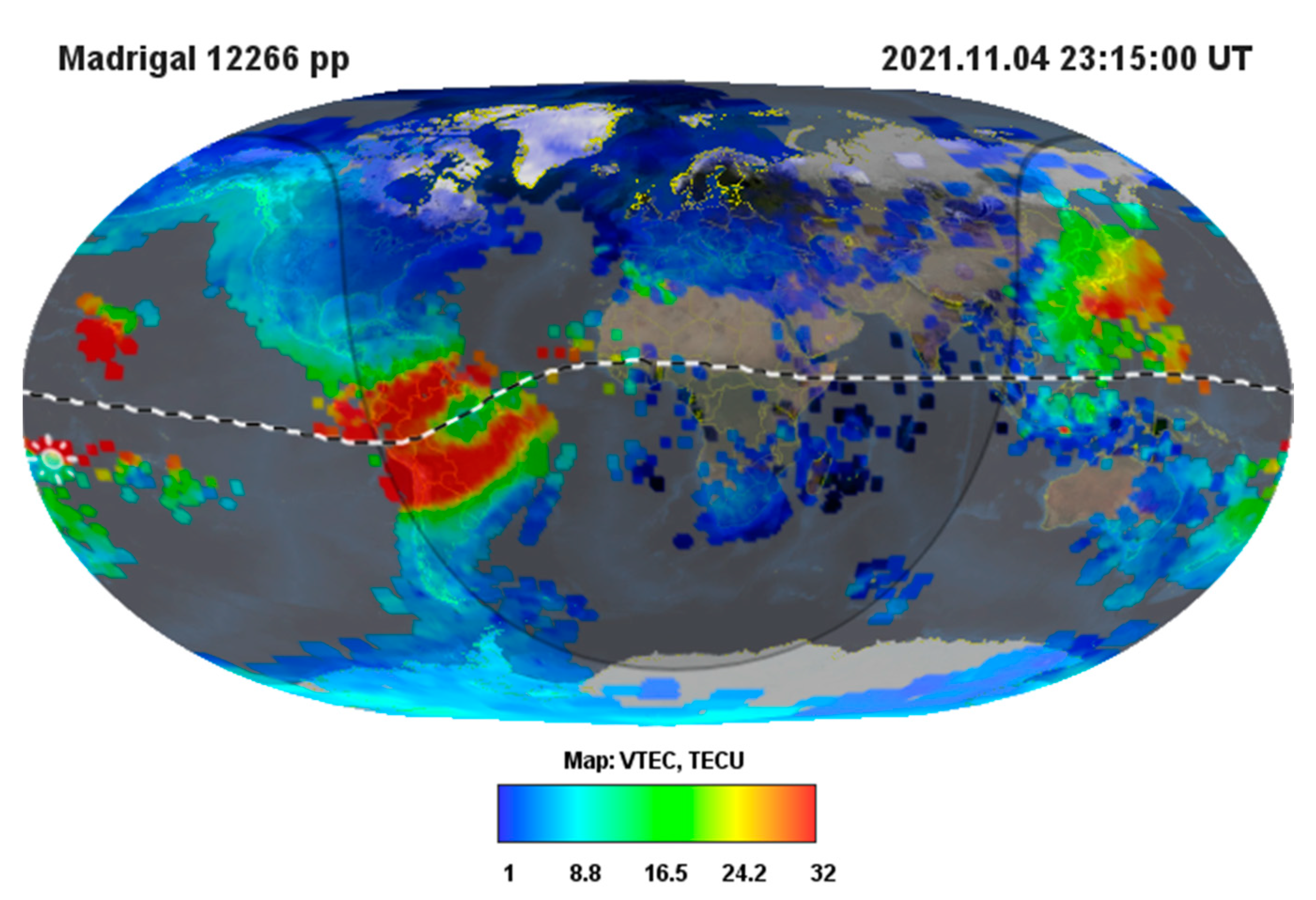
4.3. EST: 4 November 2021 Case Study
5. Summary and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gilliland, T.R.; Kenrick, G.W. Preliminary note on an automatic recorder giving a continuous height record of the Kennelly-Heaviside layer. Proc. Inst. Radio Eng. 1932, 20, 540–547. [Google Scholar] [CrossRef]
- Daniell, R.E.; Decker, D.T.; Anderson, D.N.; Jaspers, J.R.; Sojka, J.J.; Schunk, R.W. A global ionospheric conductivity and electron density (ICED) model. In Proceedings of the Ionospheric Effects Symposium, Alexandria, VA, USA, 1–3 May 1990. [Google Scholar]
- Daniell, R.E.; Whartenby, W.G.; Brown, L.D. Parameterised Real-Time Ionospheric Specification Model, PRISM Version 1.2; Computational Physics: Newton, MA, USA, 1993. [Google Scholar]
- Buchau, J.; Bullett, T.W.; Ronn, A.E.; Scro, K.D.; Carson, J.L. The Digital Ionospheric Sounding System Network of the US Air Force Weather Service; Report UAG-104, WDC-A for Solar-Terrestrial Physics; Ionosonde Network Advisory Group: Boulder, CO, USA, 1995; pp. 16–20. [Google Scholar]
- Bibl, K.; Reinisch, B.W. The universal digital ionosonde. Radio Sci. 1985, 13, 519–530. [Google Scholar] [CrossRef]
- Reinisch, B.W.; Huang, X. Automatic calculation of electron density profiles from digital ionograms: 3. Processing of bottomside ionograms. Radio Sci. 1983, 18, 477–492. [Google Scholar] [CrossRef]
- Reinisch, B.W.; Galkin, I.A. Global ionospheric radio observatory (GIRO). Earth Planet. Sci. 2011, 63, 377–381. [Google Scholar] [CrossRef] [Green Version]
- Galkin, I.A.; Reinisch, B.W.; Vesnin, A.M.; Bilitza, D.; Fridman, S.; Habarulema, J.B.; Veliz, O. Assimilation of Sparse Continuous Near-Earth Weather Measurements by NECTAR Model Morphing. Space Weather 2020, 18, e2020SW002463. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Truhlik, V.; Shubin, V.; Galkin, I.A.; Reinisch, B.W.; Huang, X. International Reference Ionosphere 2016: From ionospheric climate to real-time weather predictions. Space Weather 2017, 15, 418–429. [Google Scholar] [CrossRef]
- Galkin, I.A.; Reinisch, B.W.; Huang, X.; Bilitza, D. Assimilation of GIRO Data into a Real-Time IRI. Radio Sci. 2012, 47, RS0L07. [Google Scholar] [CrossRef]
- Galkin, I.A.; Reinisch, B.W.; Bilitza, D. Realistic Ionosphere: Real-time ionosonde service for ISWI. Sun Geosph. 2018, 13, 173–178. [Google Scholar]
- Mannucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric Time-Delay Algorithm for Single-Frequency GPS Users. IEEE Trans. Aerosp. Electron. Syst. 1987, 3, 325–331. [Google Scholar] [CrossRef]
- Hajj, G.A.; Romans, L.J. Ionospheric electron density profiles obtained with the Global Positioning System: Results from the GPS/MET experiment. Radio Sci. 1998, 33, 175–190. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J. Improving the Abel inversion by adding ground GPS data to LEO radio occultations in ionospheric sounding. Geophys. Res. Lett. 2000, 27, 2473–2476. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Solé, J.G. Global observation of the ionospheric electronic response to solar events using ground and LEO GPS data. J. Geophys. Res. Space Phys. 1998, 103, 20789–20796. [Google Scholar] [CrossRef] [Green Version]
- Fung, S.F.; Benson, R.F.; Galkin, I.A.; Green, J.L.; Reinisch, B.W.; Song, P.; Sonwalker, V. Chapter 4—Radio-frequency imaging techniques for ionospheric, magnetospheric, and planetary studies. In Magnetospheric Imaging: Understanding the Space Environment through Global Measurements; Colado-Vega, Y., Gallagher, D., Frey, H., Wing, S., Eds.; Elsevier: Amsterdam, The Netherlands, 2022; pp. 101–216. [Google Scholar]
- Kiselyova, M.V.; Kijanowski, M.P.; Knyazuyk, V.S.; Lyakhova, L.N.; Yudovich, L.A. Forecast of the F2 layer critical frequency. In Ionospheric Disturbances and Their Impact on Radio Communications; Nauka: Moscow, Russia, 1971; pp. 74–99. (In Russian) [Google Scholar]
- Kotonaeva, N.G.; Kolomin, M.V.; Mikhailov, V.V.; Tsybulya, K.G.; Philippov, M.Y. Efficiency of ionospheric model correction by vertical-incidence sounding data from an ionosonde during low sunspot activity. Geomagn. Aeron. 2022, 61, 92–99. [Google Scholar] [CrossRef]
- Rabier, F. Overview of global data assimilation developments in numerical weather-prediction centres. Q. J. R. Meteorol. Soc. 2005, 131, 3215–3233. [Google Scholar] [CrossRef]
- McNamara, L.F.; Wilkinson, P.J. Spatial correlations of foF2 deviations and their implications for global ionospheric models: 1. Ionosondes in Australia and Papua New Guinea. Radio Sci. 2009, 44, RS2016. [Google Scholar] [CrossRef]
- McNamara, L.F. Spatial correlations of foF2 deviations and their implications for global ionospheric models: 2. Digisondes in the United States, Europe, and South Africa. Radio Sci. 2009, 44, RS2017. [Google Scholar] [CrossRef]
- Harón, S.; Prasanth, R.; Raz, G.; McClure, M.; Titi, G.; Li, J.; Xu, L. HFGeo signal processing and channel modeling. In Proceedings of the 2015 Ionospheric Effects Symposium, Alexandria, VA, USA, 12–14 May 2015. [Google Scholar]
- Mitchell, C.N.; Rankov, N.R.; Bust, G.S.; Miller, E.; Gaussiran, T.; Calfas, R.; Doyle, J.D.; Teig, J.D.; Werth, J.L.; Dekine, I. Ionospheric data assimilation applied to HF geolocation in the presence of traveling ionospheric disturbances. Radio Sci. 2017, 52, 829–840. [Google Scholar] [CrossRef] [Green Version]
- Sabbagh, D.; Bagiacchi, P.; Scotto, C. Accuracy assessment of the MUF(3000) nowcasting for PECASUS space weather services. In Proceedings of the 23rd URSI General Assembly and Scientific Symposium, Rome, Italy, 29 August–5 September 2020. [Google Scholar]
- Azeem, I.; Crowley, G.; Forsythe, V.V.; Reynolds, A.S.; Stromberg, E.M.; Wilson, G.R.; Kohler, C.A. A new frontier in ionospheric observations: GPS total electron content measurements from ocean buoys. Space Weather 2020, 18, e2020SW002571. [Google Scholar] [CrossRef]
- Rideout, W.; Coster, A. Automated GPS processing for global total electron content data. GPS Solut. 2006, 10, 219–228. [Google Scholar] [CrossRef]
- Gleason, A. Time-Chart. U.S. Patent 497,917, 23 May 1893. Available online: https://patents.google.com/patent/US497917A/en (accessed on 6 January 2022).
- Froń, A.; Galkin, I.A.; Krankowski, A.; Bilitza, D.; Hernández-Pajares, M.; Reinisch, B.; Li, Z.; Kotulak, K.; Zakharenkova, I.; Cherniak, I.; et al. Towards Cooperative Global Mapping of the Ionosphere: Fusion Feasibility for IGS and IRI with Global Climate VTEC Maps. Remote Sens. 2020, 12, 3531. [Google Scholar] [CrossRef]
- Global Assimilative Model of Bottomside Ionosphere Timeline (GAMBIT). Available online: https://giro.uml.edu/GAMBIT (accessed on 6 January 2022).
- Reinisch, B.W.; Galkin, I.A.; Khmyrov, G.M.; Kozlov, A.V.; Bibl, K.; Lisysyan, I.A.; Cheney, G.P.; Huang, X.; Kitrosser, D.F.; Paznukhov, V.V.; et al. New Digisonde for research and monitoring applications. Radio Sci. 2009, 44, RS0A24. [Google Scholar] [CrossRef]
- NASA WorldWind. Available online: https://worldwind.arc.nasa.gov (accessed on 6 January 2022).
- Guillemot, C.; Le Meur, O. Image Inpainting: Overview and Recent Advances. IEEE Signal Process. Mag. 2014, 31, 127–144. [Google Scholar] [CrossRef]
- Galkin, I.A.; Reinisch, B.W.; Huang, X.; Khmyrov, G.M. Confidence score of ARTIST-5 ionogram autoscaling. In Ionosonde Network Advisory Group (INAG) Bulletin No. 73; URSI Secretariat, Commission G: Ghent, Belgium, 2013; pp. 1–7. Available online: http://www.ursi.org/files/CommissionWebsites/INAG/web-73/confidence_score.pdf (accessed on 9 January 2022).
- Li, Z.; Wang, N.; Liu, A.; Yuan, Y.; Wang, N.; Hernandez-Pajares, M.; Krankowski, A.; Yuan, H. Status of CAS global ionospheric maps after the maximum of solar cycle 24. Satell. Navig. 2021, 2, 1–15. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Wang, N.; Hernandez-Pajares, M.; Huo, X. SHPTS: Towards a new method for generating precise global ionospheric TEC map based on spherical harmonics and generalized trigonometric series functions. J. Geod. 2015, 89, 331–345. [Google Scholar] [CrossRef]
- Yuan, Y.; Ou, J. A generalized trigonometric series function model for determining ionospheric delay. Prog. Nat. Sci. 2004, 14, 1010–1014. [Google Scholar] [CrossRef]
- Wang, N.; Li, Z.; Montenbruck, O.; Tang, C. Quality assessment of GPS, Galileo and BeiDou-2/3 satellite broadcast group delays. Adv. Space Res. 2019, 64, 1764–1779. [Google Scholar] [CrossRef]
- Wang, N.; Li, Z.; Duan, B.; Hugentobler, U.; Wang, L. GPS and GLONASS observable-specific code bias estimation: Comparison of solutions from the IGS and MGEX networks. J. Geod. 2020, 94, 74. [Google Scholar] [CrossRef]
- Li, Z.; Wang, N.; Hernández-Pajares, M.; Yuan, Y.; Krankowski, A.; Liu, A.; Zha, J.; García-Rigo, A.; Roma-Dollase, D.; Yang, H.; et al. IGS real-time service for global ionospheric total electron content modeling. J. Geod. 2020, 94, 1–16. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Pajares, M.; Roma-Dollase, D.; Garcia-Fernàndez, M.; Orus-Perez, R.; García-Rigo, A. Precise ionospheric electron content monitoring from single-frequency GPS receivers. GPS Solut. 2018, 22, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Hernández-Pajares, M.; Li, Z.; Wang, L.; Yuan, H. High-rate Doppler-aided cycle slip detection and repair method for low-cost single-frequency receivers. GPS Solut. 2020, 24, 1–13. [Google Scholar] [CrossRef]
- Yang, H.; Monte-Moreno, E.; Hernández-Pajares, M.; Roma-Dollase, D. Real-time interpolation of global ionospheric maps by means of sparse representation. J. Geod. 2021, 95, 1–20. [Google Scholar]
- Liu, Q.; Hernández-Pajares, M.; Yang, H.; Monte-Moreno, E.; Roma-Dollase, D.; García-Rigo, A.; Li, Z.; Wang, N.; Laurichesse, D.; Blot, A.; et al. The cooperative IGS RT-GIMs: A reliable estimation of the global ionospheric electron content distribution in real time. Earth Syst. Sci. Data 2021, 13, 4567–4582. [Google Scholar] [CrossRef]
- Bust, G.S.; Mitchell, C.N. History, current state, and future directions of ionospheric imaging. Rev. Geophys. 2008, 46, 1–23. [Google Scholar] [CrossRef]
- Austen, J.R.; Franke, S.J.; Liu, C.H. Ionospheric imaging using computerized tomography. Radio Sci. 2008, 23, 299–307. [Google Scholar] [CrossRef]
- Kunitsyn, V.E.; Tereshchenko, E.D. Radio tomography of the ionosphere. IEEE Antennas Propag. Mag. 1992, 34, 22–32. [Google Scholar] [CrossRef]
- Schreiner, W.; Sokolovskiy, S.; Rocken, C.; Hunt, D. Analysis and validation of GPS/MET radio occultation data in the ionosphere. Radio Sci. 1999, 34, 949–966. [Google Scholar] [CrossRef]
- Fridman, S.V.; Nickisch, L.J.; Hausman, M.; Zunich, G. Assimilative model for ionospheric dynamics employing delay, Doppler, and direction of arrival measurements from multiple HF channels. Radio Sci. 2016, 51, 176–183. [Google Scholar] [CrossRef] [Green Version]
- Bruno, J.; Mitchell, C.N.; Bolmgren, K.H.A.; Witvliet, B.A. A realistic simulation framework to evaluate ionospheric tomography. Adv. Space Res. 2020, 65, 891–901. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J. Neural network modeling of the ionospheric electron content at global scale using GPS data. Radio Sci. 1997, 32, 1081–1089. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Pajares, M.; Lyu, H.; Garcia-Fernandez, M.; Orus-Perez, R. A new way of improving global ionospheric maps by ionospheric tomography: Consistent combination of multi-GNSS and multi-space geodetic dual-frequency measurements gathered from vessel-, LEO- and ground-based receivers. J. Geod. 2020, 94, 1–16. [Google Scholar] [CrossRef]
- Garcia, R.; Crespon, F. Radio tomography of the ionosphere: Analysis of an underdetermined, ill-posed inverse problem, and regional application. Radio Sci. 2008, 43, RS2014. [Google Scholar] [CrossRef] [Green Version]
- Angling, M.J.; Jackson-Booth, N.K. A short note on the assimilation of collocated and concurrent GPS and ionosonde data into the Electron Density Assimilative Model. Radio Sci. 2011, 46, RS0D13. [Google Scholar] [CrossRef] [Green Version]
- Kotova, D.S.; Ovodenko, V.B.; Yasyukevich, Y.V.; Klimenko, M.V.; Ratovsky, K.G.; Mylnikova, A.A.; Andreeva, E.S.; Kozlovsky, A.E.; Korenkova, N.A.; Nesterov, I.A.; et al. Efficiency of updating the ionospheric models using total electron content at mid- and sub-auroral latitudes. GPS Solut. 2020, 24, 1–10. [Google Scholar] [CrossRef]
- Klimenko, M.V.; Klimenko, V.V.; Zakharenkova, I.E.; Cherniak, I.V. The global morphology of the plasmaspheric electron content during Northern winter 2009 based on GPS/COSMIC observation and GSM TIPmodel results. Adv. Space Res. 2015, 55, 2077–2085. [Google Scholar] [CrossRef]
- Titheridge, J.E. The slab thickness of the mid-latitude ionosphere. Planet Space Sci. 1973, 21, 1775–1793. [Google Scholar] [CrossRef]
- Davies, K. Ionospheric Radio; Peter Peregrinus, Ltd.: London, UK, 1990. [Google Scholar]
- Stankov, S.M.; Warnant, R. Ionospheric slab thickness—Analysis, modelling and monitoring. Adv. Space Res 2009, 44, 1295–1303. [Google Scholar] [CrossRef]
- Stankov, S.M.; Jakowski, N. Topside ionospheric scale height analysis and modelling based on radio occultation measurements. J. Atmos. Sol. Terr. Phys. 2006, 68, 134–162. [Google Scholar] [CrossRef]
- Leitinger, R.; Ciraolo, L.; Kersley, L.; Kouris, S.S.; Spalla, P. Relations between electron content and peak density: Regular and extreme behaviour. Ann. Geophys. 2004, 47, 1093–1107. [Google Scholar]
- Nava, B.; Radicella, S.M.; Azpilicueta, F. Data ingestion into NeQuick 2. Radio Sci. 2011, 46, RS0D17. [Google Scholar] [CrossRef] [Green Version]
- Migoya-Orué, Y.; Nava, B.; Radicella, S.M.; Alazo-Cuartas, K. GNSS derived TEC data ingestion into IRI 2012. Adv. Space Res. 2015, 55, 1994–2002. [Google Scholar] [CrossRef]
- Pignalberi, A.; Nava, B.; Pietrella, M.; Cesaroni, C.; Pezzopane, M. Mid-latitude climatology of the ionospheric equivalent slab thickness over two solar cycles. J. Geod. 2021, 95, 1–18. [Google Scholar] [CrossRef]
- Pignalberi, A.; Pezzopane, M.; Nava, B.; Coïsson, P. On the link between the topside ionospheric effective scale height and the plasma ambipolar diffusion, theory and preliminary results. Sci. Rep. 2020, 10, 17541. [Google Scholar] [CrossRef] [PubMed]
- Jakowski, N.; Hoque, M.; Mielich, J.; Hall, C. Equivalent slab thickness of the ionosphere over Europe as an indicator of long-term temperature changes in the thermosphere. J. Atm. Sol. Terr. Phys. 2017, 163, 91–102. [Google Scholar] [CrossRef]
- Fox, M.W.; Mendillo, M.; Klobuchar, J.A. Ionospheric equivalent slab thickness and its modeling applications. Radio Sci. 1991, 26, 429–438. [Google Scholar] [CrossRef]
- Jakowski, N.; Hoque, M.N. Global equivalent slab thickness model of the Earth’s ionosphere. J. Space Weather Space Clim. 2021, 11, 10. [Google Scholar] [CrossRef]
- Cai, X.; Burns, A.G.; Wang, W.; Coster, A.; Qian, L.; Liu, J.; Solomon, S.C.; Eastes, R.W.; Daniell, R.E.; McClintock, W.E. Comparison of GOLD nighttime measurements with total electron content: Preliminary results. J. Geophys. Res. Space Phys. 2020, 125, e2019JA027767. [Google Scholar] [CrossRef]
- Eastes, R.W.; Solomon, S.C.; Daniell, R.E.; Anderson, D.N.; Burns, A.G.; England, S.L. Global-scale observations of the equatorial ionization anomaly. Geophys. Res. Lett. 2019, 46, 9318–9326. [Google Scholar] [CrossRef] [Green Version]
- Angling, M.J.; Nogués-Correig, O.; Nguyen, V.; Vetra-Carvalho, S.; Bocquet, F.-X.; Nordstrom, K.; Melville, S.E.; Savastano, G.; Mohanty, S.; Masters, D. Sensing the ionosphere with the Spire radio occultation constellation. J. Space Weather Space Clim. 2021, 11, 56. [Google Scholar] [CrossRef]
- Pedatella, N.M.; Zakharenkova, I.; Braun, J.J.; Cherniak, I.; Hunt, D.; Schreiner, W.S.; Straus, P.R.; Valant-Weiss, B.L.; Vanhove, T.; Weiss, J.; et al. Processing and validation of FORMOSAT-7/COSMIC-2 GPS total electron content observations. Radio Sci. 2021, 56, e2021RS007267. [Google Scholar] [CrossRef]
- HRIDE: High Resolution Ionospheric Data Exploitation for Autonomous Vehicle Safety and Operations and Earthquake Precursor Detection. ESA Demonstration Project. 2021. Available online: https://business.esa.int/projects/hride (accessed on 9 January 2022).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galkin, I.; Froń, A.; Reinisch, B.; Hernández-Pajares, M.; Krankowski, A.; Nava, B.; Bilitza, D.; Kotulak, K.; Flisek, P.; Li, Z.; et al. Global Monitoring of Ionospheric Weather by GIRO and GNSS Data Fusion. Atmosphere 2022, 13, 371. https://doi.org/10.3390/atmos13030371
Galkin I, Froń A, Reinisch B, Hernández-Pajares M, Krankowski A, Nava B, Bilitza D, Kotulak K, Flisek P, Li Z, et al. Global Monitoring of Ionospheric Weather by GIRO and GNSS Data Fusion. Atmosphere. 2022; 13(3):371. https://doi.org/10.3390/atmos13030371
Chicago/Turabian StyleGalkin, Ivan, Adam Froń, Bodo Reinisch, Manuel Hernández-Pajares, Andrzej Krankowski, Bruno Nava, Dieter Bilitza, Kacper Kotulak, Paweł Flisek, Zishen Li, and et al. 2022. "Global Monitoring of Ionospheric Weather by GIRO and GNSS Data Fusion" Atmosphere 13, no. 3: 371. https://doi.org/10.3390/atmos13030371
APA StyleGalkin, I., Froń, A., Reinisch, B., Hernández-Pajares, M., Krankowski, A., Nava, B., Bilitza, D., Kotulak, K., Flisek, P., Li, Z., Wang, N., Dollase, D. R., García-Rigo, A., & Batista, I. (2022). Global Monitoring of Ionospheric Weather by GIRO and GNSS Data Fusion. Atmosphere, 13(3), 371. https://doi.org/10.3390/atmos13030371