
Length Scale Analyses of Background Error Covariances for EnKF and EnSRF Data Assimilation


Abstract
:1. Introduction
2. Methods
2.1. Data Assimilations
2.1.1. Ensemble-Based Methods: EnKF and EnSRF
2.1.2. Variational Method: 3DVAR
2.2. Covariance Localization and Inflation
2.3. Numerical Models and Data
2.4. Length Scale Analysis
3. Results
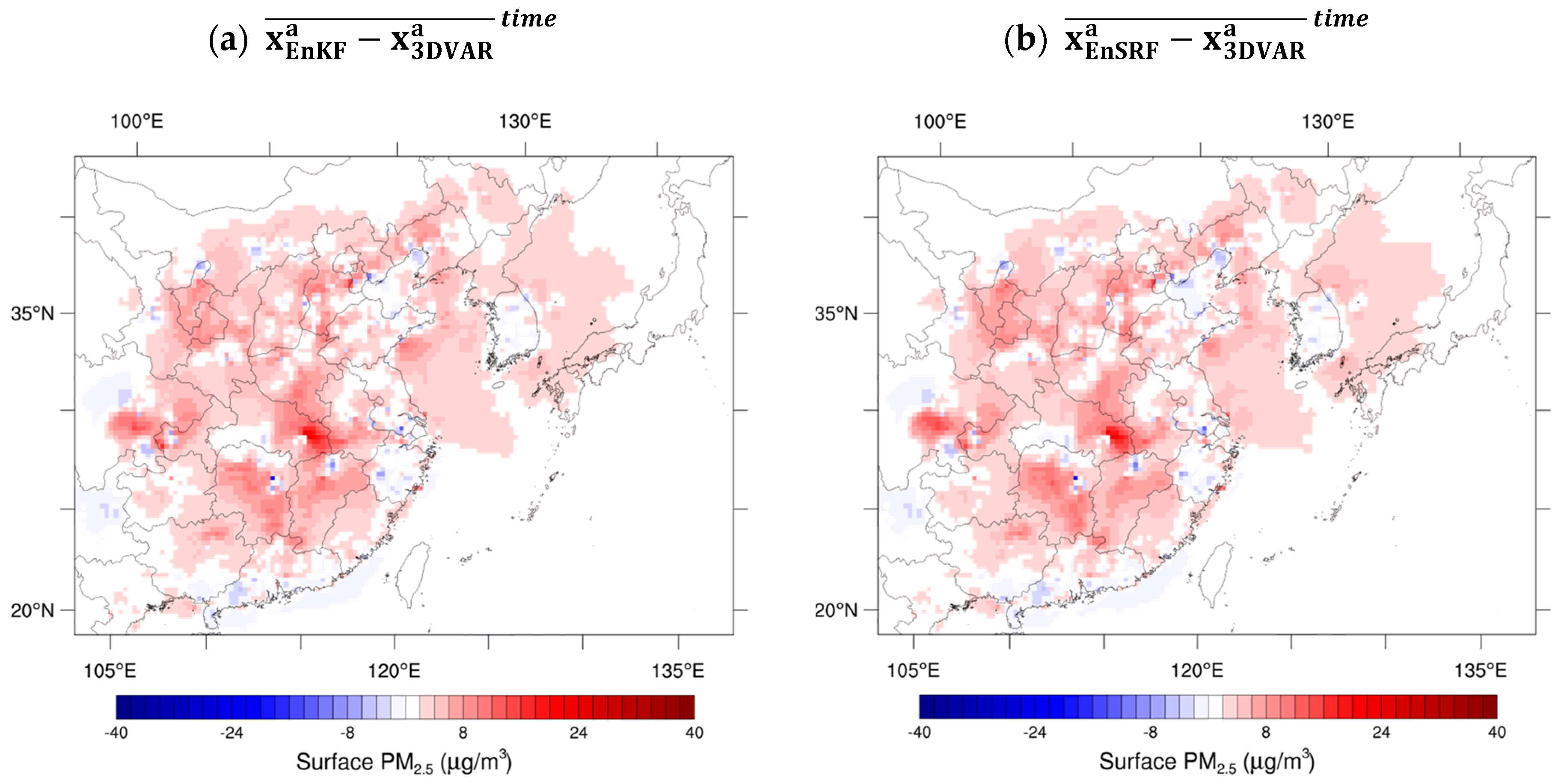
3.1. Differences in Analytical Fields
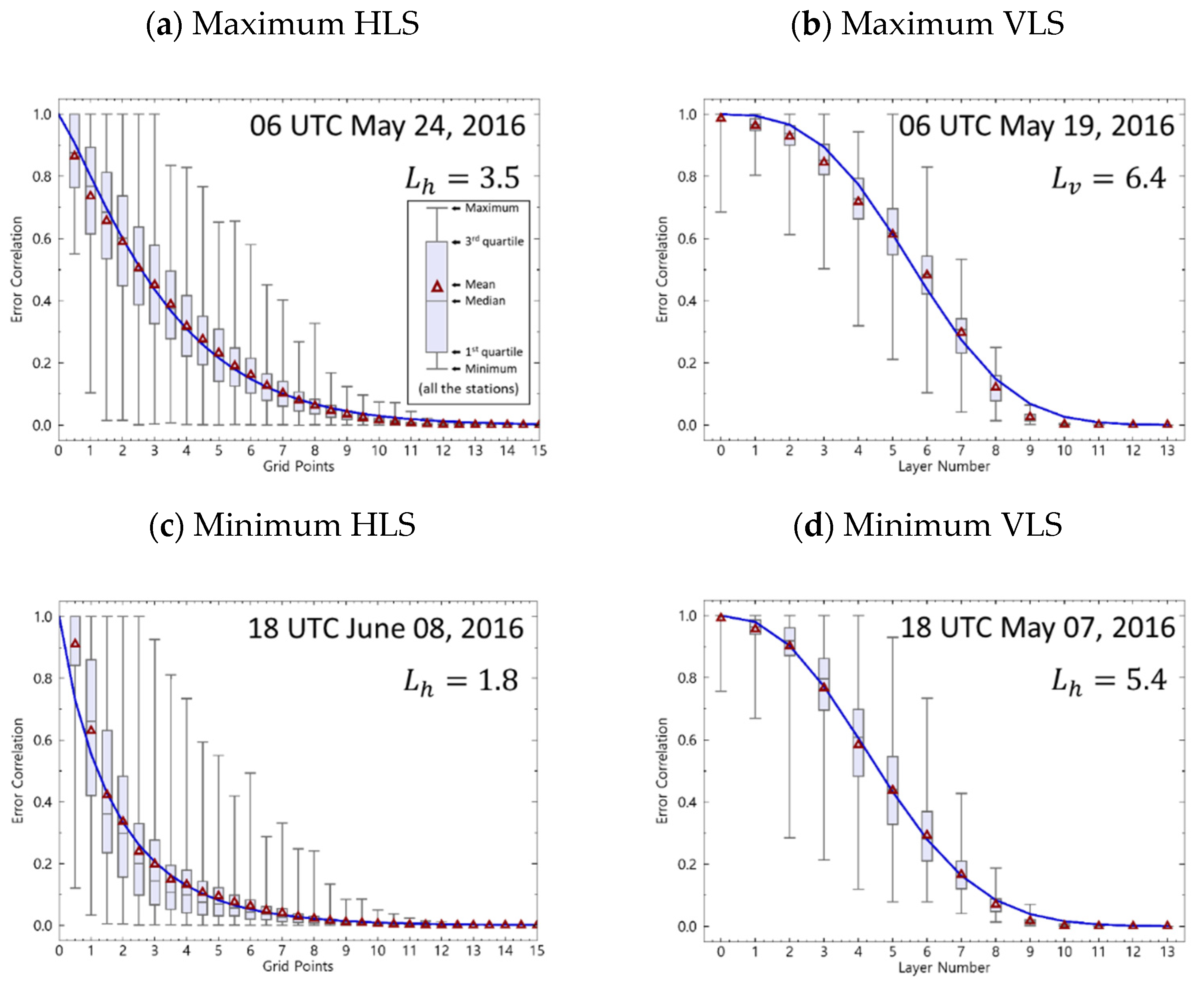
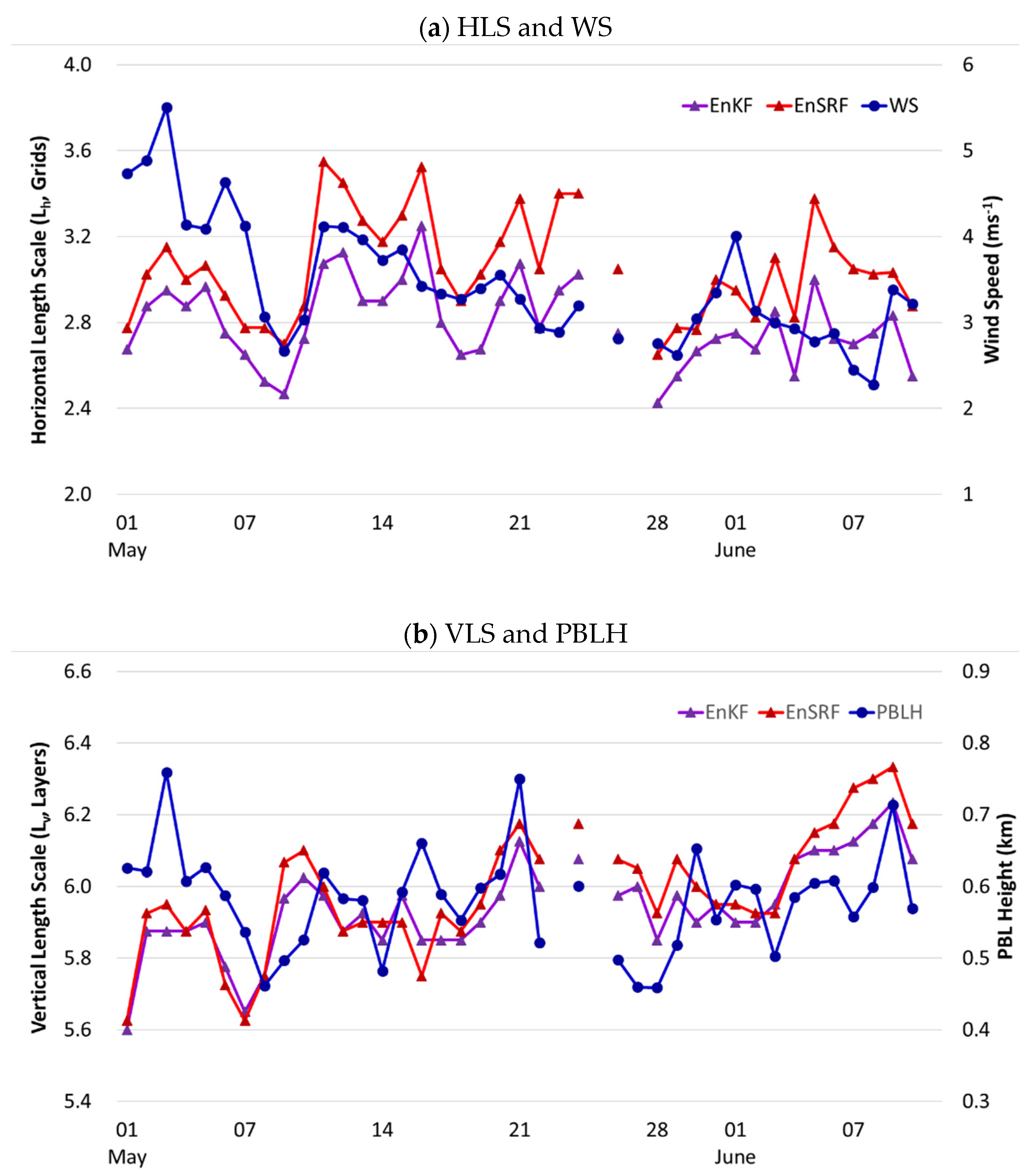
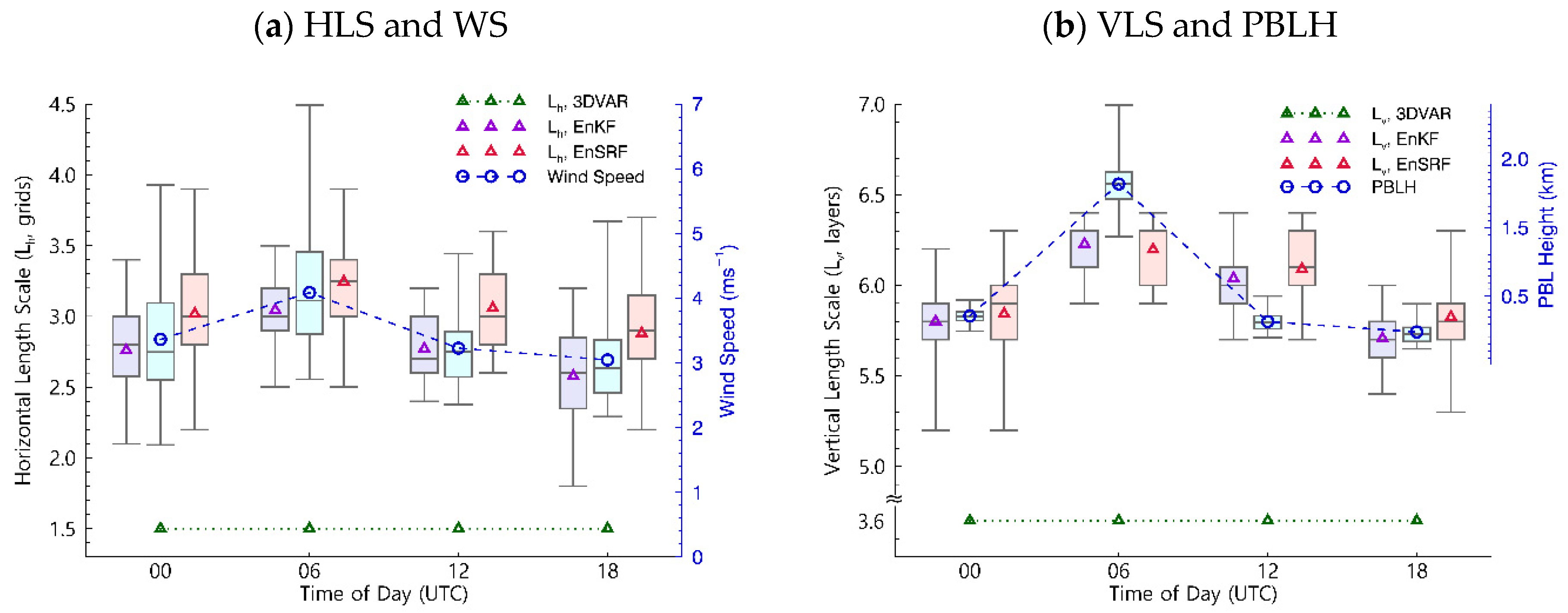
3.2. Length Scale Analysis and Relationships with Meteorological Variables
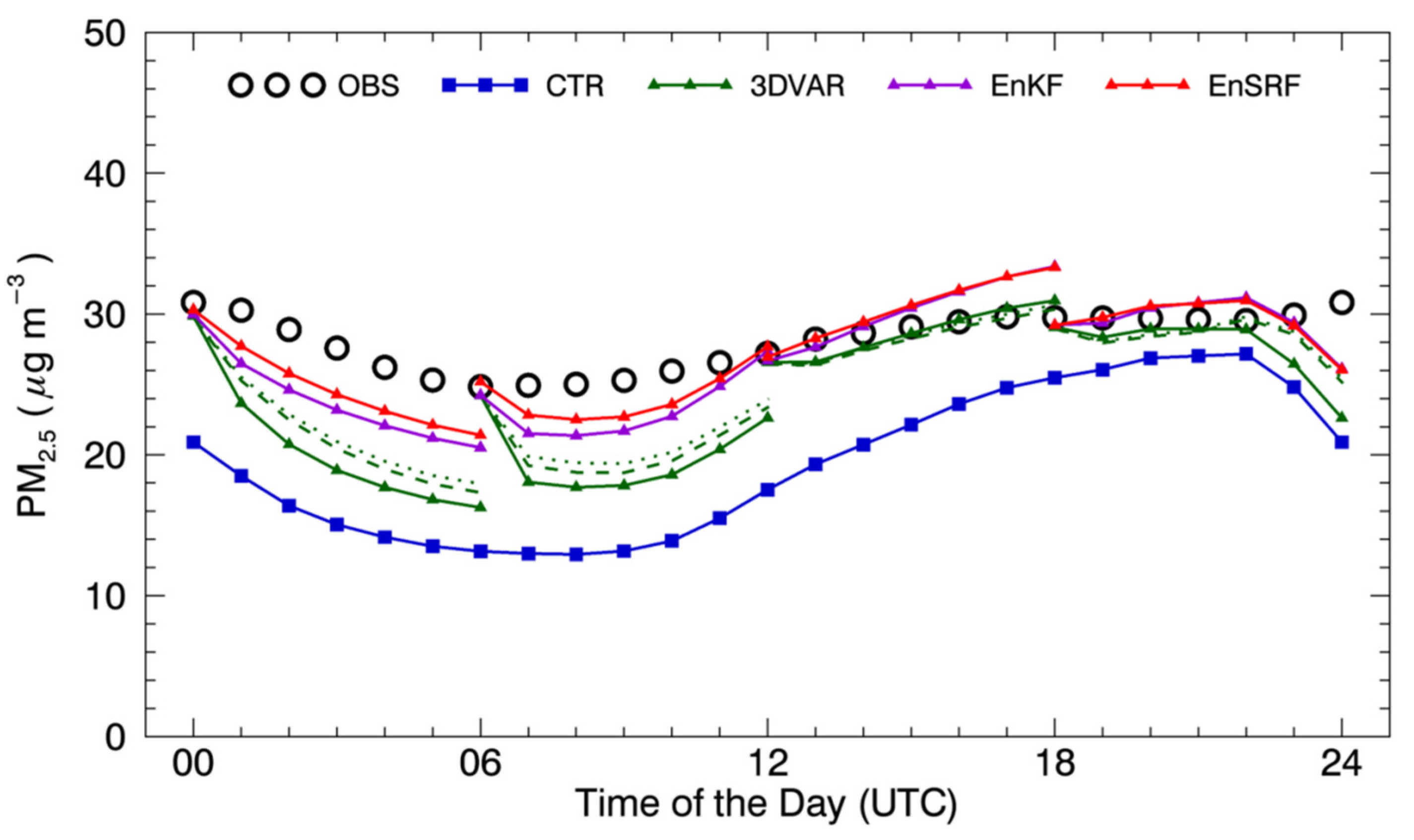
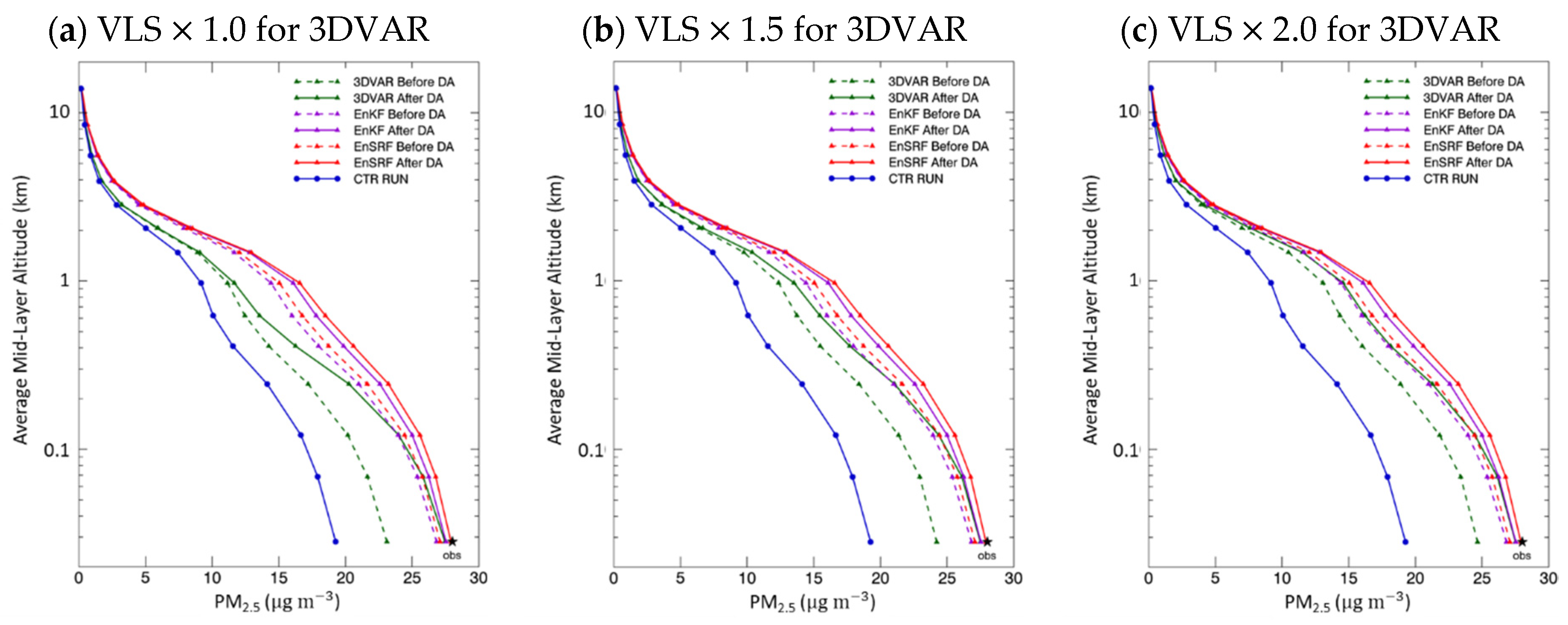
3.3. Short-Term Predictions and Vertical Length Scale Adjustment for the 3DVAR
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| Data assimilation | DA |
| Chemical transport model | CTM |
| Three- and four-dimensional variational methods | 3DVAR and 4DVAR |
| Optimal interpolation | OI |
| Ensemble Kalman filter | EnKF |
| Ensemble square root filter | EnSRF |
| Local ensemble transform Kalman filter | LETKF |
| Ensemble adjustment Kalman filter | EAKF |
| Background error covariance | BEC |
| National Meteorological Centre | NMC |
| Hydrogen chloride | HCL |
| Nitric acid | HNO3 |
| Initial condition | IC |
| Boundary condition | BC |
| Community multiscale air quality | CMAQ |
| Horizontal and vertical length scale | HLS and VLS |
| Grid-point statistical interpolation | GSI |
| National Centers for Environmental Prediction | NCEP |
| Generalized background error covariance matrix model | GEN_BE |
| Relaxation-to-prior (or previous) spread | RTPS |
| NCEP Final | FNL |
| National Ambient Air Quality Monitoring Information System | NAMIS |
| Korea-United States Air Quality | KORUS-AQ |
| Control run | CTR |
| Wind speed | WS |
| Planetary boundary layer height | PBLH |
| Root mean square error | RMSE |
| Normalized mean bias | NMB |
| Index of agreement | IOA |
| Correlation coefficient | CORR |
| Reduced rank square root filter | RRSQRT |
| Singular evolutive Kalman filter | SEEK |
| Karhunen–Loeve-based Kalman filter | KLKF |
| Generalized polynomial chaos | gPC |
| Dynamically orthogonal | DO |
| Mixture ensemble filter | MEnF |
| Polynomial chaos expansion | PCE |
| Gaussian mixture model | GMM |
References
- Sandu, A.; Chai, T. Chemical data assimilation—An overview. Atmosphere 2011, 2, 426–463. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Bocquet, M.; Mallet, V.; Seigneur, C.; Baklanov, A. Real-time air quality forecasting, part II: State of the science, current research needs, and future prospects. Atmos. Environ. 2012, 60, 656–676. [Google Scholar] [CrossRef]
- Bocquet, M.; Elbern, H.; Eskes, H.; Hirtl, M.; Žabkar, R.; Carmichael, G.R.; Flemming, J.; Inness, A.; Pagowski, M.; Pérez Camaño, J.L.; et al. Data assimilation in atmospheric chemistry models: Current status and future prospects for coupled chemistry meteorology models. Atmos. Chem. Phys. 2015, 15, 5325–5358. [Google Scholar] [CrossRef] [Green Version]
- Menut, L.; Bessagnet, B. What can we expect from data assimilation for air quality forecast? Part I: Quantification with academic test cases. J. Atmos. Ocean. Technol. 2019, 36, 269–279. [Google Scholar] [CrossRef]
- Chai, T.; Kim, H.-C.; Pan, L.; Lee, P.; Tong, D. Impact of moderate resolution imaging spectroradiometer aerosol optical depth and AirNow PM2.5 assimilation on community multi-scale air quality aerosol predictions over the contiguous United States. J. Geophys. Res. Atmos. 2017, 122, 5399–5415. [Google Scholar] [CrossRef]
- Lee, K.; Yu, J.; Lee, S.; Park, M.; Hong, H.; Park, S.Y.; Choi, M.; Kim, J.; Kim, Y.; Woo, J.H.; et al. Development of Korean air quality prediction system version 1 (KAQPS v1) with focuses on practical issues. Geosci. Model Dev. 2020, 13, 1055–1073. [Google Scholar] [CrossRef] [Green Version]
- Pang, J.; Liu, Z.; Wang, X.; Bresch, J.; Ban, J.; Chen, D.; Kim, J. Assimilating AOD retrievals from GOCI and VIIRS to forecast surface PM2.5 episodes over Eastern China. Atmos. Environ. 2018, 179, 288–304. [Google Scholar] [CrossRef]
- Ha, S.; Liu, Z.; Sun, W.; Lee, Y.; Chang, L. Improving air quality forecasting with the assimilation of GOCI aerosol optical depth (AOD) retrievals during the KORUS-AQ period. Atmos. Chem. Phys. 2020, 20, 6015–6036. [Google Scholar] [CrossRef]
- Zhang, Z.; Zang, Z.; Cheng, X.; Lu, C.; Huang, S.; Hu, Y.; Liang, Y.; Jin, L.; Ye, L. Development of three-dimensional variational data assimilation method of aerosol for the CMAQ model: An application for PM2.5 and PM10 forecasts in the Sichuan Basin. Earth Space Sci. 2021, 8, e2020EA001614. [Google Scholar] [CrossRef]
- Morcrette, J.J.; Boucher, O.; Jones, L.; Salmond, D.; Bechtold, P.; Beljaars, A.; Benedetti, A.; Bonet, A.; Kaiser, J.W.; Razinger, M.; et al. Aerosol analysis and forecast in the European centre for medium-range weather forecasts integrated forecast system: Forward modeling. J. Geophys. Res. Atmos. 2009, 114, D06206. [Google Scholar] [CrossRef]
- Benedetti, A.; Di Giuseppe, F.; Jones, L.; Peuch, V.H.; Rémy, S.; Zhang, X. The value of satellite observations in the analysis and short-range prediction of Asian dust. Atmos. Chem. Phys. 2019, 19, 987–998. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Restrepo, S.; Yarce, A.; Pinel, N.; Quintero, O.L.; Segers, A.; Heemink, A.W. Forecasting PM10 and PM2.5 in the Aburrá Valley (Medellín, Colombia) via EnKF based data assimilation. Atmos. Environ. 2020, 232, 117507. [Google Scholar] [CrossRef]
- Park, S.Y.; Dash, U.K.; Yu, J.; Yumimoto, K.; Uno, I.; Song, C.H. Implementation of an ensemble Kalman filter in the community multiscale air quality model (CMAQ Model v5.1) for data assimilation of ground-level PM2.5. Geosci. Model Dev. Discuss. 2021, 2021, 1–35. [Google Scholar] [CrossRef]
- Chu, K.; Peng, Z.; Liu, Z.; Lei, L.; Kou, X.; Zhang, Y.; Bo, X.; Tian, J. Evaluating the impact of emissions regulations on the emissions reduction during the 2015 China victory day parade with an ensemble square root filter. J. Geophys. Res. Atmos. 2018, 123, 4122–4134. [Google Scholar] [CrossRef]
- Choi, Y.; Chen, S.-H.; Huang, C.-C.; Earl, K.; Chen, C.-Y.; Schwartz, C.S.; Matsui, T. Evaluating the impact of assimilating aerosol optical depth observations on dust forecasts over North Africa and the East Atlantic using different data assimilation methods. J. Adv. Model. Earth Syst. 2020, 12, e2019MS001890. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yumimoto, K.; Nagao, T.M.; Kikuchi, M.; Sekiyama, T.T.; Murakami, H.; Tanaka, T.Y.; Ogi, A.; Irie, H.; Khatri, P.; Okumura, H.; et al. Aerosol data assimilation using data from Himawari-8, a next-generation geostationary meteorological satellite. Geophys. Res. Lett. 2016, 43, 5886–5894. [Google Scholar] [CrossRef]
- Kong, L.; Tang, X.; Zhu, J.; Wang, Z.; Li, J.; Wu, H.; Wu, Q.; Chen, H.; Zhu, L.; Wang, W.; et al. A 6-year-long (2013–2018) high-resolution air quality reanalysis dataset in China based on the assimilation of surface observations from CNEMC. Earth Syst. Sci. Data 2021, 13, 529–570. [Google Scholar] [CrossRef]
- Rubin, J.I.; Reid, J.S.; Hansen, J.A.; Anderson, J.L.; Collins, N.; Hoar, T.J.; Hogan, T.; Lynch, P.; McLay, J.; Reynolds, C.A.; et al. Development of the ensemble navy aerosol analysis prediction system (ENAAPS) and its application of the data assimilation research testbed (DART) in support of aerosol forecasting. Atmos. Chem. Phys. 2016, 16, 3927–3951. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Wang, T.; Mizzi, A.P.; Anderson, J.L.; Zhuang, B.; Xie, M.; Wu, R. Multiconstituent data assimilation with WRF-Chem/DART: Potential for adjusting anthropogenic emissions and improving air quality forecasts over Eastern China. J. Geophys. Res. Atmos. 2019, 124, 7393–7412. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Parrish, D.F.; Derber, J.C. The National Meteorological Center’s spectral statistical-interpolation analysis system. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Pagowski, M.; Grell, G.A. Experiments with the assimilation of fine aerosols using an ensemble Kalman filter. J. Geophys. Res. Atmos. 2012, 117, D21302. [Google Scholar] [CrossRef]
- Skachko, S.; Errera, Q.; Ménard, R.; Christophe, Y.; Chabrillat, S. Comparison of the ensemble Kalman filter and 4D-Var assimilation methods using a stratospheric tracer transport model. Geosci. Model Dev. 2014, 7, 1451–1465. [Google Scholar] [CrossRef] [Green Version]
- Chatterjee, A.; Michalak, A.M. Technical note: Comparison of ensemble Kalman filter and variational approaches for CO2 data assimilation. Atmos. Chem. Phys. 2013, 13, 11643–11660. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Liu, Z.; Chen, D.; Ban, J. Improving PM2.5 forecast over China by the joint adjustment of initial conditions and source emissions with an ensemble Kalman filter. Atmos. Chem. Phys. 2017, 17, 4837–4855. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Lei, L.; Liu, Z.; Sun, J.; Ding, A.; Ban, J.; Chen, D.; Kou, X.; Chu, K. The impact of multi-species surface chemical observation assimilation on air quality forecasts in China. Atmos. Chem. Phys. 2018, 18, 17387–17404. [Google Scholar] [CrossRef] [Green Version]
- Evensen, G. The ensemble Kalman Filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Schwartz, C.S.; Liu, Z.; Lin, H.-C.; Cetola, J.D. Assimilating aerosol observations with a “hybrid” variational-ensemble data assimilation system. J. Geophys. Res. Atmos. 2014, 119, 4043–4069. [Google Scholar] [CrossRef]
- Chen, D.; Liu, Z.; Ban, J.; Zhao, P.; Chen, M. Retrospective analysis of 2015–2017 wintertime PM2.5 in China: Response to emission regulations and the role of meteorology. Atmos. Chem. Phys. 2019, 19, 7409–7427. [Google Scholar] [CrossRef] [Green Version]
- Whitaker, J.S.; Hamill, T.M. Ensemble data assimilation without perturbed observations. Mon. Weather Rev. 2002, 130, 1913–1924. [Google Scholar] [CrossRef]
- Shao, H.; Derber, J.; Huang, X.-Y.; Hu, M.; Newman, K.; Stark, D.; Lueken, M.; Zhou, C.; Nance, L.; Kuo, Y.-H.; et al. Bridging research to operations transitions: Status and plans of community GSI. Bull. Am. Meteor. Soc. 2016, 97, 1427–1440. [Google Scholar] [CrossRef]
- Lee, S.; Song, C.H.; Han, K.M.; Henze, D.K.; Lee, K.; Yu, J.; Woo, J.H.; Jung, J.; Choi, Y.; Saide, P.E.; et al. Impacts of uncertainties in emissions on aerosol data assimilation and short-term PM2.5 predictions over Northeast Asia. Atmos. Environ. 2022, 271, 11921. [Google Scholar] [CrossRef]
- Descombes, G.; Auligné, T.; Vandenberghe, F.; Barker, D.M.; Barré, J. Generalized background error covariance matrix model (GEN_BE v2.0). Geosci. Model Dev. 2015, 8, 669–696. [Google Scholar] [CrossRef] [Green Version]
- Gaspari, G.; Cohn, S.E. Construction of correlation functions in two and three dimensions. Q. J. R. Meteor. Soc. 1999, 125, 723–757. [Google Scholar] [CrossRef]
- Constantinescu, E.M.; Sandu, A.; Chai, T.; Carmichael, G.R. Assessment of ensemble-based chemical data assimilation in an idealized setting. Atmos. Environ. 2007, 41, 18–36. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M. Evaluating methods to account for system errors in ensemble data assimilation. Mon. Weather Rev. 2012, 140, 3078–3089. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.; Dudhia, J.; Gill, D.O.; Barker, D.; Wang, W.; Powers, J.G. A description of the advanced research WRF version 3 (No. NCAR/TN-475+STR). Univ. Corp. Atmos. Res. 2008, 27, 3–27. [Google Scholar] [CrossRef]
- National Centers for Environmental Prediction/National Weather Service/NOAA/U.S. Department of Commerce. NCEP FNL Operational Model Global Tropospheric Analyses, Continuing from July 1999; Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Laboratory: Boulder, CO, USA, 2000. [Google Scholar] [CrossRef]
- Byun, D.; Schere, K.L. Review of the governing equations, computational algorithms, and other components of the models-3 community multiscale air quality (CMAQ) modeling system. Appl. Mech. Rev. 2006, 59, 51–77. [Google Scholar] [CrossRef]
- Jang, Y.; Lee, Y.; Kim, J.; Kim, Y.; Woo, J.-H. Improvement China point source for improving bottom-up emission inventory. Asia-Pac. J. Atmos. Sci. 2020, 56, 107–118. [Google Scholar] [CrossRef]
- Guenther, A.; Karl, T.; Harley, P.; Wiedinmyer, C.; Palmer, P.I.; Geron, C. Estimates of global terrestrial isoprene emissions using MEGAN (Model of Emissions of Gases and Aerosols from Nature). Atmos. Chem. Phys. 2006, 6, 318–3210. [Google Scholar] [CrossRef] [Green Version]
- Guenther, A.B.; Jiang, X.; Heald, C.L.; Sakulyanontvittaya, T.; Duhl, T.; Emmons, L.K.; Wang, X. The model of emissions of gases and aerosols from nature version 2.1 (MEGAN2.1): An extended and updated framework for modeling biogenic emissions. Geosci. Model Dev. 2012, 5, 1471–1492. [Google Scholar] [CrossRef] [Green Version]
- Wiedinmyer, C.; Akagi, S.K.; Yokelson, R.J.; Emmons, L.K.; Al-Saadi, J.A.; Orlando, J.J.; Soja, A.J. The Fire inventory from NCAR (FINN): A high resolution global model to estimate the emissions from open burning. Geosci. Model Dev. 2011, 4, 625–641. [Google Scholar] [CrossRef] [Green Version]
- Jordan, C.E.; Crawford, J.H.; Beyersdorf, A.J.; Eck, T.F.; Halliday, H.S.; Nault, B.A.; Chang, L.-S.; Park, J.; Park, R.; Lee, G.; et al. Investigation of factors controlling PM2.5 variability across the South Korean Peninsula during KORUS-AQ. Elem. Sci. Anthr. 2020, 8, 28. [Google Scholar] [CrossRef] [PubMed]
- Verlaan, M.; Heemink, A.W. Tidal flow forecasting using reduced-rank square root filters. Stoch. Hydrol. Hydraul. 1997, 11, 349–368. [Google Scholar] [CrossRef] [Green Version]
- Pham, D.T.; Verron, J.; Roubaud, M.C. A singular evolutive extended kalman filter for data assimilation in oceanography. J. Mar. Syst. 1998, 16, 323–340. [Google Scholar] [CrossRef]
- Zhang, D.; Lu, Z.; Chen, Y. Dynamic reservoir data assimilation with an efficient, dimension-reduced Kalman filter. SPE J. 2007, 12, 108–117. [Google Scholar] [CrossRef]
- Li, J.; Xiu, D. A generalized polynomial chaos based ensemble Kalman filter with high accuracy. J. Comput. Phys. 2009, 228, 5454–5469. [Google Scholar] [CrossRef]
- Sondergaard, T.; Lermusiaux, P.F.J. Data assimilation with Gaussian mixture models using the dynamically orthogonal field equations. Part I: Theory and scheme. Mon. Weather Rev. 2013, 141, 1737–1760. [Google Scholar] [CrossRef] [Green Version]
- Tagade, P.; Seybold, H.; Ravela, S. Mixture ensembles for data assimilation in dynamic data-driven environmental systems. Procedia Comput. Sci. 2014, 29, 1266–1276. [Google Scholar] [CrossRef] [Green Version]
- Avasarala, S.; Subramani, D. A non-Gaussian Bayesian filter for sequential data assimilation with non-intrusive polynomial chaos expansion. Int. J. Numer. Methods Eng. 2021, 122, 7156–7181. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | WRF v3.8.1 | CMAQ v5.2.1 |
|---|---|---|
| Horizontal grids | 153 × 114 | 144 × 105 |
| Grid resolution | 27 km | 27 km |
| Vertical layers | 33 layers (top: 50 hPa) | 15 layers (top: 20 km) |
| ICs and BCs | NCEP FNL 0.25° data | Default static profiles |
| Simulation period | 00 UTC 26 April 2016–00 UTC 12 June 2016, including 5 days spin-up from the beginning | |
| Metric * | CTR | 3DVR | EnKF | EnSRF | ||
|---|---|---|---|---|---|---|
| Mean ** | 19.4 | 24.4 | 24.8 | 25.1 | 26.8 | 27.3 |
| RMSE | 18.3 | 12.6 | 12.4 | 12.3 | 11.9 | 11.7 |
| NMB (%) | −30.7 | −13.0 | −10.9 | −9.8 | −4.4 | −2.5 |
| IOA | 0.686 | 0.834 | 0.842 | 0.844 | 0.852 | 0.861 |
| CORR | 0.528 | 0.721 | 0.727 | 0.729 | 0.735 | 0.735 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.-Y.; Dash, U.K.; Yu, J. Length Scale Analyses of Background Error Covariances for EnKF and EnSRF Data Assimilation. Atmosphere 2022, 13, 160. https://doi.org/10.3390/atmos13020160
Park S-Y, Dash UK, Yu J. Length Scale Analyses of Background Error Covariances for EnKF and EnSRF Data Assimilation. Atmosphere. 2022; 13(2):160. https://doi.org/10.3390/atmos13020160
Chicago/Turabian StylePark, Soon-Young, Uzzal Kumar Dash, and Jinhyeok Yu. 2022. "Length Scale Analyses of Background Error Covariances for EnKF and EnSRF Data Assimilation" Atmosphere 13, no. 2: 160. https://doi.org/10.3390/atmos13020160
APA StylePark, S.-Y., Dash, U. K., & Yu, J. (2022). Length Scale Analyses of Background Error Covariances for EnKF and EnSRF Data Assimilation. Atmosphere, 13(2), 160. https://doi.org/10.3390/atmos13020160