Linearizations of the Spherical Harmonic Discrete Ordinate Method (SHDOM)



Abstract
1. Introduction
2. Problem Formulation
3. Linearized SHDOM
3.1. Linearized Forward Approach
3.2. Linearized Forward-Adjoint Approach
- 1.
- The input parameters of the numerical algorithm are the partial derivatives and at all grid points , and eventually, the partial derivatives at all grid points on the bottom surface and in all upward and downward discrete ordinate directions and , respectively.
- 2.
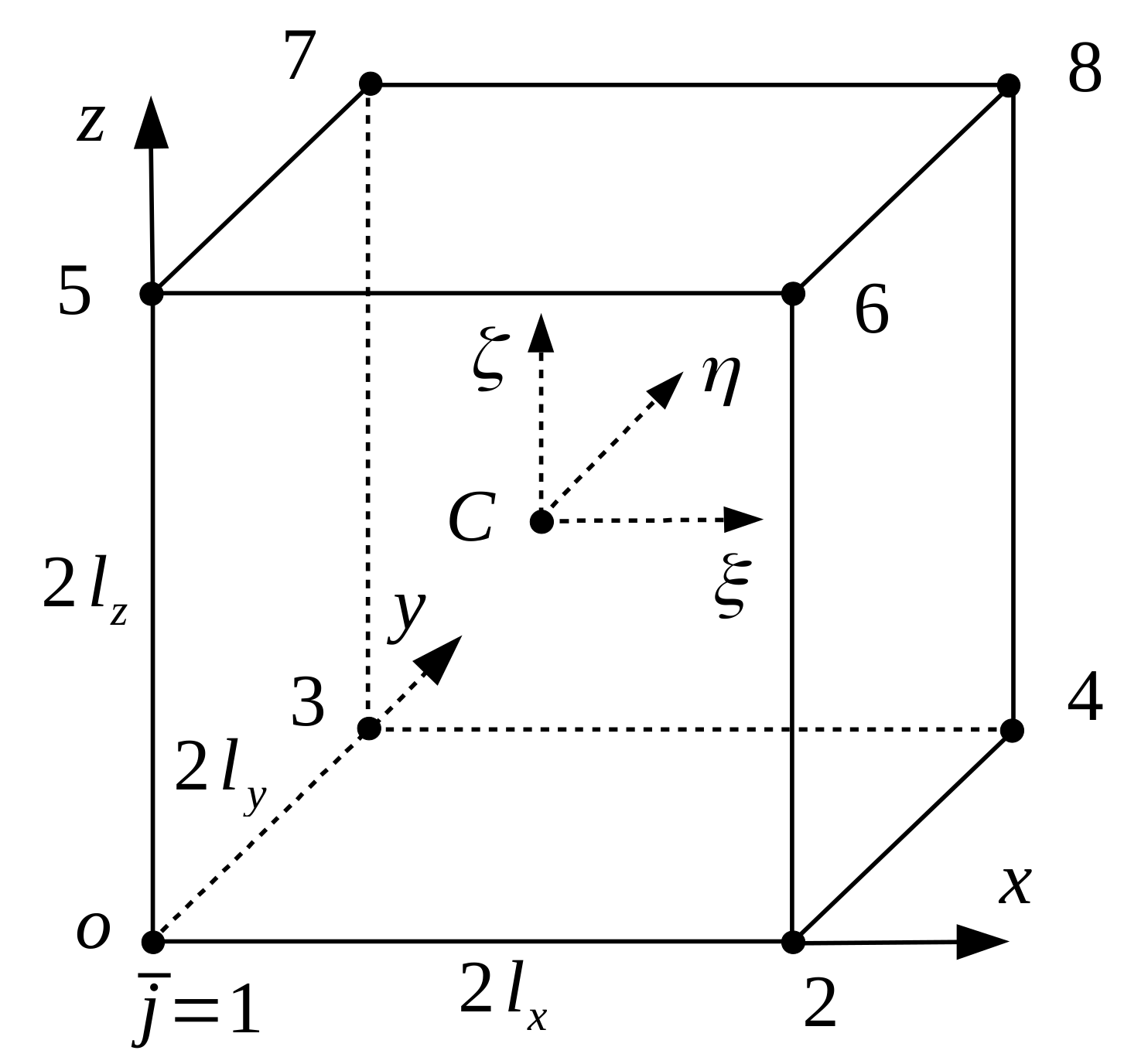
- The interpolation coefficients and are computed analytically in a local coordinate system attached to the grid cell.
- 3.
- The radiances and in the expressions of and , respectively, are computed by the source integration method.
- 4.
- For solar problems with the delta-M method [24], the radiative transfer equation is expressed in terms of the scaled quantitieswhere f is the truncation fraction. At each grid point, we switch from the partial derivatives and to and , respectively, whereby the latter two are computed from Equation (63) by using the chain rule.
- 5.
- The partial derivatives of the signal correction in the TMS method of Nakajima and Tanaka [25] are computed analytically (Appendix A).
- 6.
- 7.
- 8.
- The code uses two alternative interpolation schemes for the source function: a linear variation of the extinction/source function product within a cell, i.e., Equation (34), and a linear variation of the source function within a cell, i.e.,for . In the second case, the terms and are computed, respectively, as
- 9.
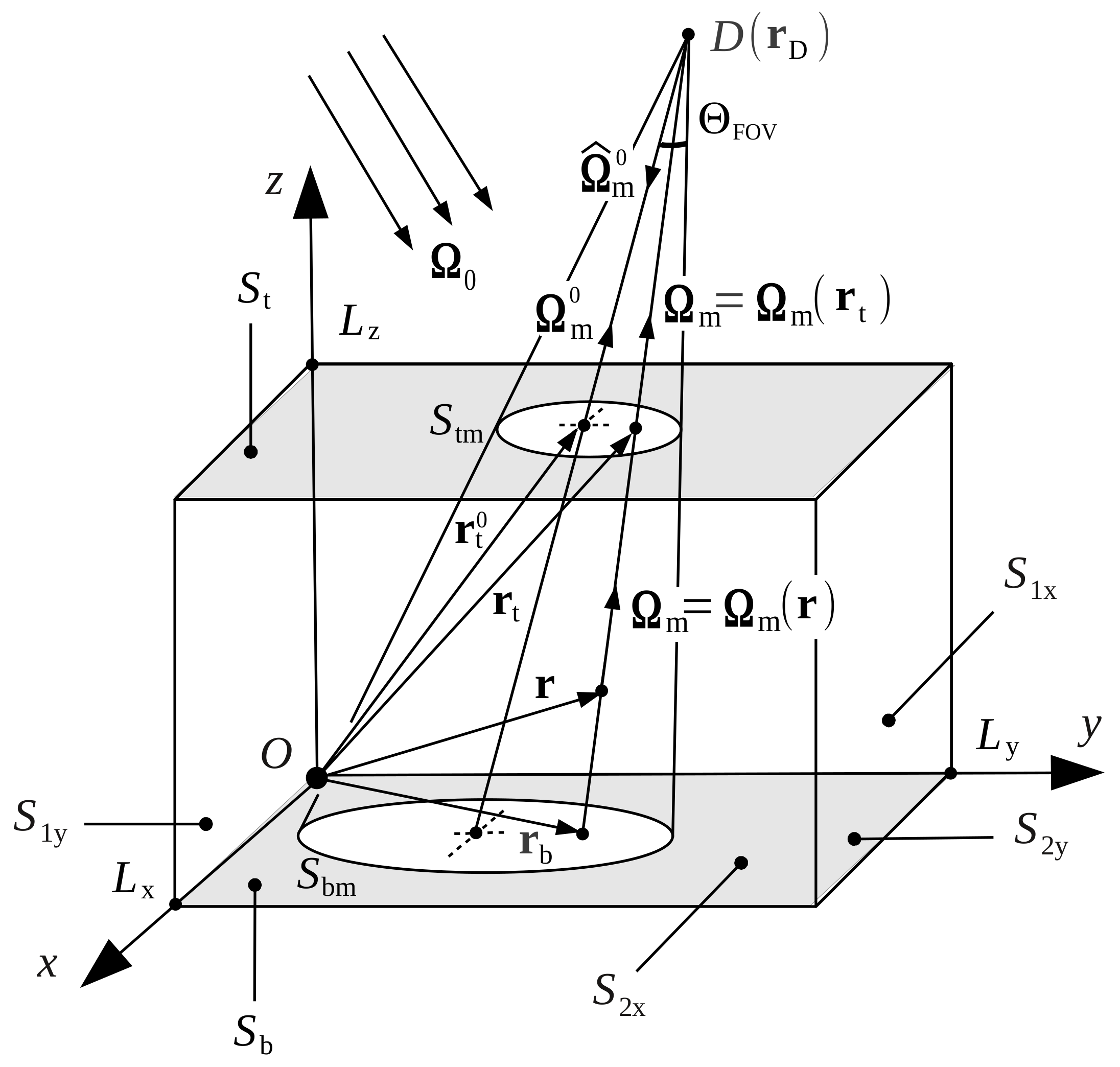
- In the case of satellite remote sensing we may assume that (i) the distance from the top of the atmosphere to the detector is sufficiently large, so that we can approximate , and (ii) the footprint of the detector is a rectangle of lengths and centered at . The second assumption is made because the domain is discretized in rectangular cuboid elements. In this context, the measured signal is computed aswhere the normalized characteristic function takes the value 1 inside the footprint of the detector and 0 otherwise.
- 10.
- The solution of the adjoint problem is a challenging task due to the spatial discontinuity of the pseudo-forward direct beam. In SHDOM, this type of problem is handled by the adaptive grid procedure. Essentially, the adaptive grid supplies extra spatial resolution along the boundaries of the pseudo-forward direct beam, so that there are not large discontinuities in the grid. In order to reduce the number of adaptive grid cells, the step characteristic function of the detector can be replaced by a smooth function, e.g., trapezoidal, Gaussian, cosine [23]. In the first case, the normalized characteristic function reads aswhere, for example, is given bywith , , and .
- 11.
- In the linearized forward-adjoint approach, the forward and adjoint problems are solved successively on the same grid; in this way, the interpolation between different grids is avoided. Actually, in the first step, the adjoint problem is solved by using the adaptive grid procedure with a prescribed splitting accuracy (Appendix A), and in the second step, the forward problem is solved on the resulting grid without splitting. In the linearized forward approach, the forward problem is solved first by using the adaptive grid procedure, and then, the partial derivatives are computed on the same grid; in this way, a less amount of memory for storing the derivatives of the radiance and the source function with respect to the atmospheric parameters of interest is required.
4. Numerical Simulations
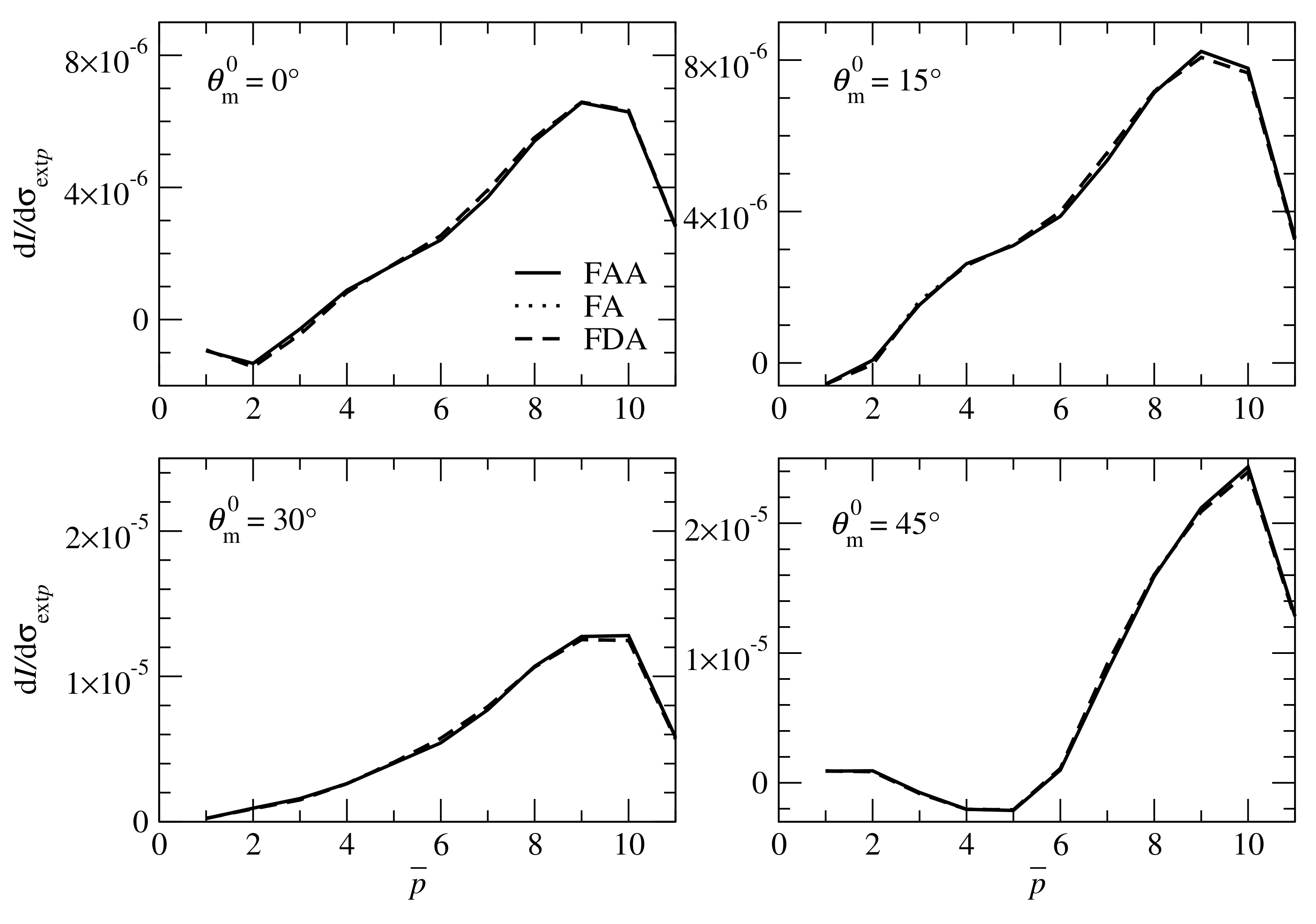
4.1. Example 1
- 1.
- the accuracy of the measured signal is higher than that of its derivatives, and
- 2.
- the accuracy of the linearized forward-adjoint approach is higher than that of the linearized forward approach.
- 1.
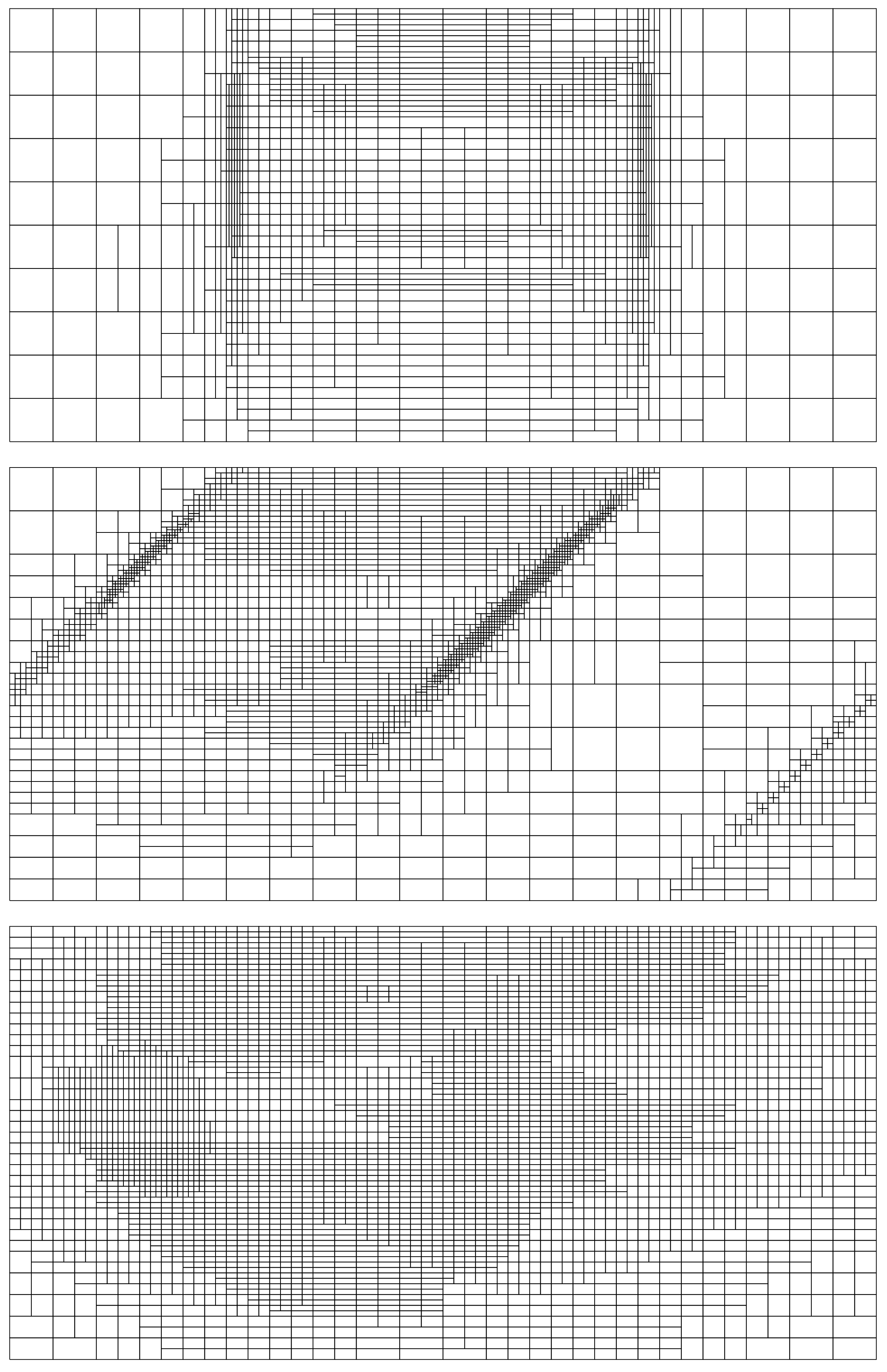
- for the linearized forward-adjoint approach, the number of adaptive grid cells is higher in the domain “seen” by the detector along the direction and in particular, along the boundaries of the pseudo-forward direct beam,
- 2.
- for the linearized forward approach, the number of adaptive grid cells is higher in the entire domain along the solar direction and when large discontinuities in the source function are present, and
- 3.
- in general, the number of adaptive grid cells for the linearized forward approach is grater than that for the linearized forward-adjoint approach.
- .1
- As it can be inferred from Figure 5, the linearized forward-adjoint approach uses a rougher discretization grid (depending on the detector zenith angle ) as compared to the forward and finite-difference approaches (which use the same grid).
- 2.
- In the linearized forward-adjoint approach, the extinction/source function product is assumed to vary linearly within the cell, while in the forward and finite-difference approaches, the extinction/source function product is assumed to vary linearly along the characteristic.
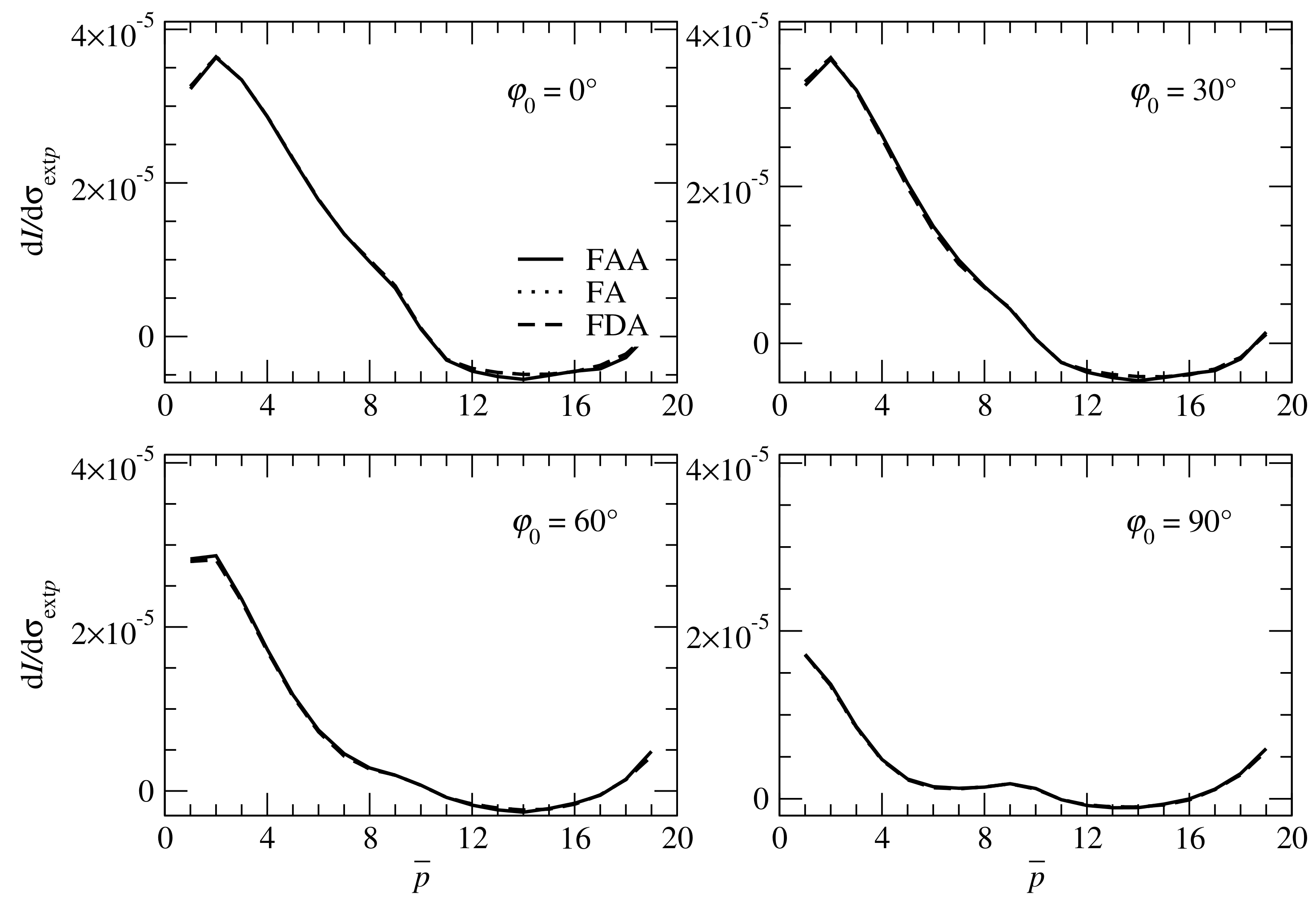
4.2. Example 2
5. Conclusions
- 1.
- The linearized SHDOM with analytical derivatives is an accurate approach. However, the method is time-consuming and demands a large computer memory. The reason is that not only the source function has to be stored as a spherical harmonic series at each grid point, but also its derivatives with respect to the atmospheric parameters of interest.
- 2.
- The linearized SHDOM with a forward-adjoint approach requires less storage for derivatives calculation, are much faster, but relatively less accurate. The main reason for this lower accuracy is that different interpolation schemes are used for radiance and derivative calculations.
- 1.
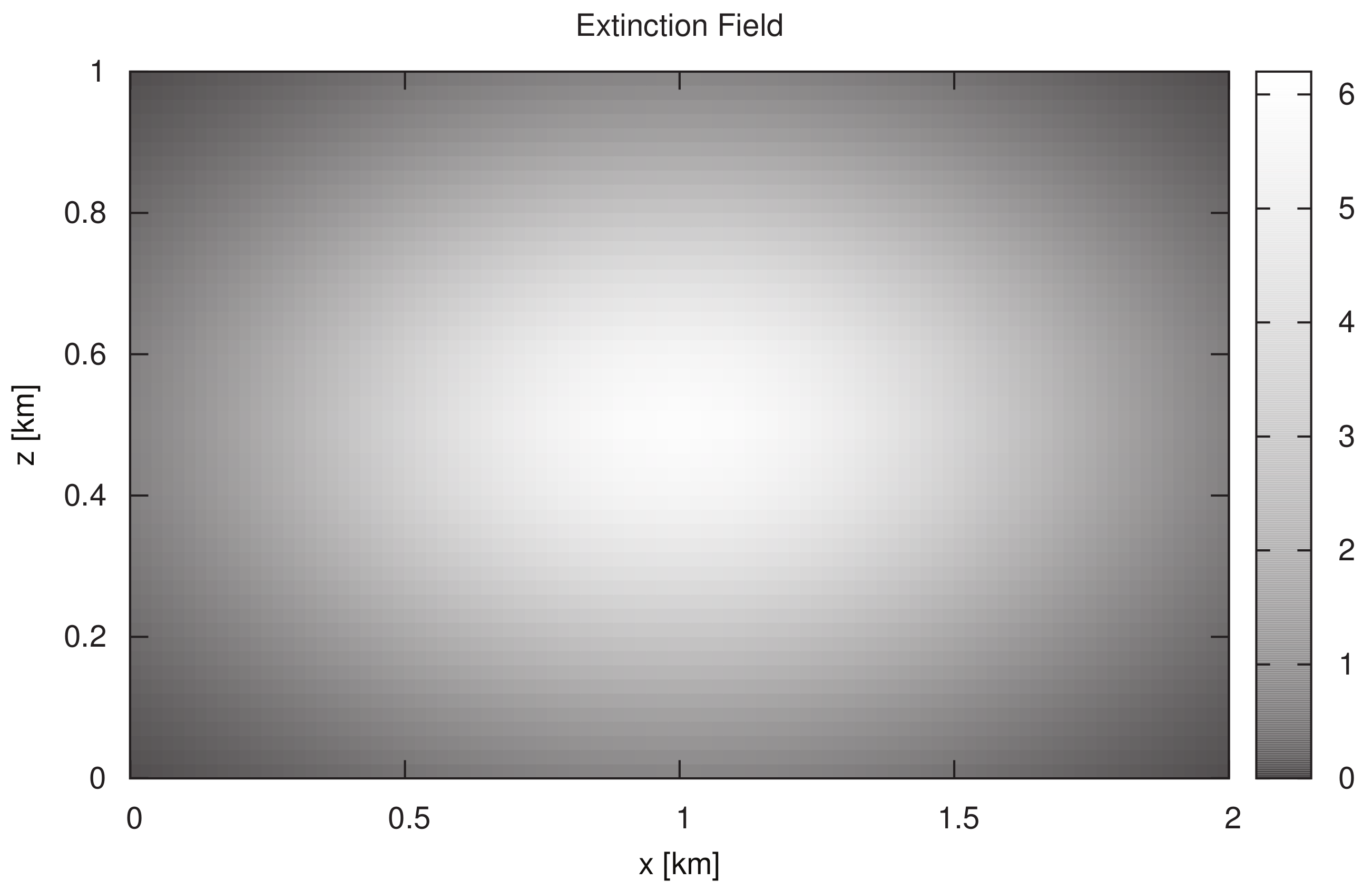
- Retrieval of cloud model parameters. For broken clouds [30], the indicator function in Equation (71) takes the values 1 inside the cloud and 0 inside the clear sky region. As in [31], the extinction field can be parametrized in terms of (cf. Equation (71)), the cloud top height , and the cloud bottom height . The cloud optical thickness and the cloud geometrical parameters can be retrieved in the oxygen A-band by using the correlated k-distribution method for the broadband integration of the gaseous line absorption. Note that SHDOM is able to compute monochromatic and broadband radiative transfer (with a k distribution).
- 2.
- Trace gas retrievals under cloudy conditions. The retrieval of total column of trace gases, e.g., , , etc., can be performed by means of the differential optical absorption spectroscopy (DOAS) technique [32]. This approach requires the knowledge of the air mass factor (AMF), i.e., the partial derivative of the measured signal with respect to the total column of the trace gas at a specific wavelength. The main goal of the analysis is the computation of the air mass factor when clouds are outside the footprint of the instrument (effect of horizontal cloud edges on AMF calculation).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
- Step 1.
- The source function is transformed to discrete ordinates by means of the relation
- Step 2.
- The discrete ordinate radiance is computed from the source function by integrating the radiative transfer equation. Essentially, (i) the radiances are computed at all grid points in all downward discrete ordinate directions by integrating the radiative transfer equation with the top boundary condition , where and are the quadrature nodes and weights in the lower hemisphere, (ii) the radiances at the bottom boundary grid points in all upward discrete ordinate directions are computed from the boundary conditionand (iii) the radiances are computed at all grid points in all upward discrete ordinate directions by integrating the radiative transfer equation with the boundary condition (A11).
- Step 3.
- The discrete ordinate radiance at each grid point is transformed to the spherical harmonic space according to
- Step 4.
- At each grid point, the source function is computed from the radiance in the spherical harmonic space as
- 1.
- The radiance and source function are initialized before the solution iterations with an Eddington radiative transfer solution on independent columns of the base grid.
- 2.
- The explicit form of the transforms in Equations (A10) and (A12) illustrates how the azimuthal and zenith angle parts partially separate. For more than about 12 azimuthal angles, an FFT is used for the azimuthal Fourier transform.
- 3.
- In Step 2, the radiative transfer equation is integrated backward from each grid point to a grid cell face that has known radiances at its bounding grid points. In the short-characteristic method, the integration is across just one cell, while in the long characteristic method, the characteristic is traced backward until the transmission falls below some minimum specified value. In the latter case, the error from interpolating the radiance at the grid cell face is reduced. According to the SHDOM difference scheme, the radiance at the exiting point A along a characteristic , , is computed from the integral form of the radiative transfer equationwhere is the radiance at the entering point B, is the distance between the points A and B, andis the integral of the source function along the characteristic. Setting and , and assuming that the extinction and the extinction/source function product vary linearly along the characteristic, yieldsfor , andfor , whereis the optical depth along the characteristic. Note that under the above assumptions, the representation (A16) follows from an expansion of the solution to the first order in the path distance , while the representation (A17) is a particular case of the general solution derived in [33]. The exiting and the entering values of the extinction and extinction/source function product , , , and are computed by bilinear interpolation from the grid point values of the faces pierced by the characteristic, while the radiance is also bilinearly interpolated between the surrounding grid points to give the initial radiance for integration.
- 4.
- To increase the convergence rate, an acceleration method based on geometrical convergence is applied. At the iteration step K, the “accelerated” source column vector is computed aswhere is the column vector encapsulating the expansion coefficients , , , at all grid points , i.e., ,is the residual source vector at the iteration step K, andwithis the acceleration parameter. The iterations are stopped when the solution criterionis satisfied, where is the solution tolerance.
- 5.
- If the delta-M scaling method is applied, then the optical parameters , , and are scaled before their use. The scaled quantities , , and are given, respectively, by (the dependency on is omitted)whereis the truncation fraction.
- 6.
- The radiance at a specified direction and location is computed by integrating the source function through the medium, while the spherical harmonic representation of the source function is transformed to the desired viewing direction .
- 7.
- For solar problems with the delta-M method, the TMS method is used to compute the source function. This method replaces the scaled, truncated Legendre phase function expansion for the singly scattered solar radiation by the full, unscaled phase function expansion, while the multiply scattered contribution still comes from the truncated phase function. The source function at grid point in direction is then computed aswhere .
- 8.
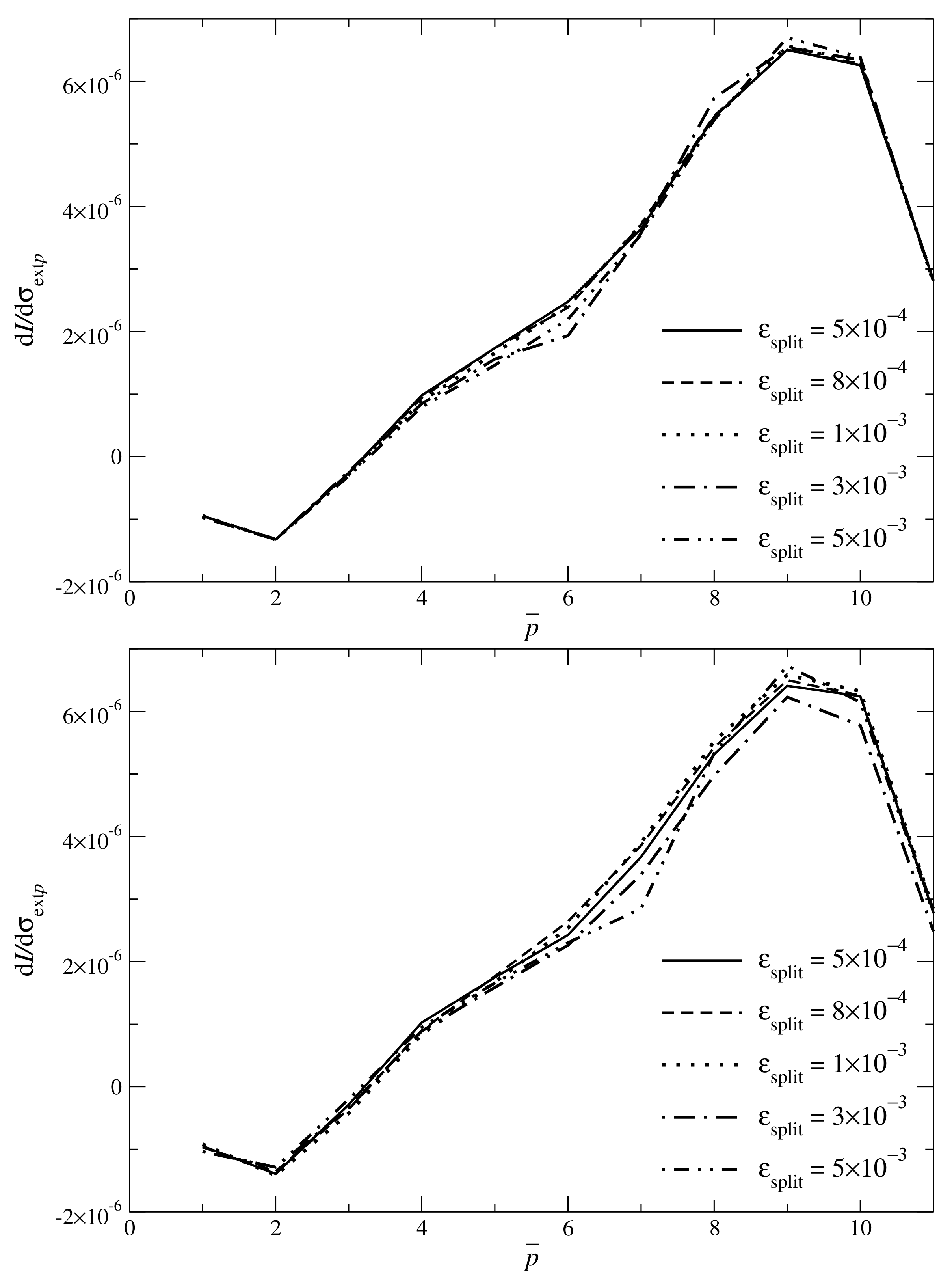
- The adaptive grid evolves from the base grid by splitting cells where more resolution is judged to be needed. The criterion for splitting cells is based on how much the source function times extinction changes across a cell. A cell may be split in half in either of the three Cartesian directions, depending on whether any of them exceed the splitting criterion. For cell c, the cell-splitting criterion iswhere u is one of the three Cartesian directions x, y, and z,and , , are two cell corners along direction u, and are the two cell faces crossed by direction u, , , , , and . The criterion is averaged over the four corners, i.e., , and the cells are sorted by the maximum over the splitting directions of the averaged splitting criterion . At the iteration step K, those cells c with the highest criterion above a certain value are split first. The new cells may themselves be divided during one solution iteration. As the solution iterations proceed, the cell splitting accuracy is gradually lowered to the desired final cell-spliting accuracy , and so more grid points are added at each iteration during this process.
Appendix B
Appendix C
Appendix D
References
- Ingmann, P.; Veihelmann, B.; Langen, J.; Lamarre, D.; Stark, H.; Bazalgette Courrèges-Lacoste, G. Requirements for the GMES Atmosphere Service and ESA’s implementation concept: Sentinels-4/-5 and -5p. Remote Sens. Environ. Sentin. Missions Oppor. Sci. 2012, 120, 58–69. [Google Scholar] [CrossRef]
- Kokhanovsky, A. The influence of horizontal inhomogeneity on radiative characteristics of clouds: An asymptotic case study. IEEE Trans. Geosci. Remote Sens. 2003, 41, 817–825. [Google Scholar] [CrossRef]
- Marshak, A.; Platnick, S.; Várnai, T.; Wen, G.; Cahalan, R.F. Impact of three-dimensional radiative effects on satellite retrievals of cloud droplet sizes. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Efremenko, D.S.; Schüssler, O.; Doicu, A.; Loyola, D. A stochastic cloud model for cloud and ozone retrievals from UV measurements. J. Quant. Spectrosc. Radiat. Transf. 2016, 184, 167–179. [Google Scholar] [CrossRef]
- Zhuravleva, T.B.; Nasrtdinov, I.M.; Russkova, T.V. Influence of 3D cloud effects on spatial-angular characteristics of the reflected solar radiation field. Atmos. Ocean. Opt. 2017, 30, 103–110. [Google Scholar] [CrossRef]
- Efremenko, D.S.; Doicu, A.; Loyola, D.; Trautmann, T. Fast Stochastic Radiative Transfer Models for Trace Gas and Cloud Property Retrievals Under Cloudy Conditions. In Springer Series in Light Scattering; Springer International Publishing: Basel, Switzerland, 2018; pp. 231–277. [Google Scholar]
- Evans, K. The spherical harmonic discrete ordinate method for three-dimensional atmospheric radiative transfer. J. Atmos. Sci. 1998, 55, 429–446. [Google Scholar] [CrossRef]
- Pincus, R.; Evans, K. Computational cost and accuracy in calculating three-dimensional radiative transfer: Results for new implementations of Monte Carlo and SHDOM. J. Atmos. Sci. 2009, 66, 3131–3146. [Google Scholar] [CrossRef]
- Spherical Harmonic Discrete Ordinate Method (SHDOM) for Atmospheric Radiative Transfer. Available online: http://coloradolinux.com/shdom/ (accessed on 20 April 2019).
- Doicu, A.; Efremenko, D.; Trautmann, T. A multi-dimensional vector spherical harmonics discrete ordinate method for atmospheric radiative transfer. J. Quant. Spectrosc. Radiat. Transf. 2013, 118, 121–131. [Google Scholar] [CrossRef]
- Emde, C.; Barlakas, V.; Cornet, C.; Evans, F.; Korkin, S.; Ota, Y.; Labonnote, L.C.; Lyapustin, A.; Macke, A.; Mayer, B.; et al. IPRT polarized radiative transfer model intercomparison project—Phase A. J. Quant. Spectrosc. Radiat. Transf. 2015, 164, 8–36. [Google Scholar] [CrossRef]
- Spurr, R.; Kurosu, T.; Chance, K. A linearized discrete ordinate radiative transfer model for atmospheric remote-sensing retrieval. J. Quant. Spectrosc. Radiat. Transf. 2001, 68, 689–735. [Google Scholar] [CrossRef]
- Spurr, R. LIDORT and VLIDORT. Linearized pseudo-spherical scalar and vector discrete ordinate radiative transfer models for use in remote sensing retrieval problems. In Light Scattering Reviews; Kokhanovsky, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 3, pp. 229–275. [Google Scholar]
- Marchuk, G. Equation for the value of information from weather satellite and formulation of inverse problems. Cosm. Res. 1964, 2, 394–409. [Google Scholar]
- Marchuk, G.I. Adjoint Equations and Analysis of Complex Systems; Springer: Cham, Switzerland, 1995. [Google Scholar]
- Landgraf, J.; Hasekamp, O.; Box, M.; Trautmann, T. A linearized radiative transfer model for ozone profile retrieval using the analytical forward-adjoint perturbation theory approach. J. Geophys. Res. Atmos. 2001, 106, 27291–27305. [Google Scholar] [CrossRef]
- Ustinov, E.A. Adjoint sensitivity analysis of radiative transfer equation: Temperature and gas mixing ratio weighting functions for remote sensing of scattering atmospheres in thermal IR. J. Quant. Spectrosc. Radiat. Transf. 2001, 68, 195–211. [Google Scholar] [CrossRef]
- Box, M. Radiative perturbation theory: A review. Env. Model. Softw. 2002, 17, 95–106. [Google Scholar] [CrossRef]
- Walter, H.; Landgraf, J.; Hasekamp, O. Linearization of a pseudo-spherical vector radiative transfer model. J. Quant. Spectrosc. Radiat. Transf. 2004, 85, 251–283. [Google Scholar] [CrossRef]
- Ustinov, E. Atmospheric weighting functions and surface partial derivatives for remote sensing of scattering planetary atmospheres in thermal spectral region: General adjoint approach. J. Quant. Spectrosc. Radiat. Transf. 2005, 92, 351–371. [Google Scholar] [CrossRef]
- Rozanov, V.; Rozanov, A. Relationship between different approaches to derive weighting functions related to atmospheric remote sensing problems. J. Quant. Spectrosc. Radiat. Transf. 2007, 105, 217–242. [Google Scholar] [CrossRef]
- Martin, W.; Cairns, B.; Bal, G. Adjoint methods for adjusting three-dimensional atmosphere and surface properties to fit multi-angle/multi-pixel polarimetric measurements. J. Quant. Spectrosc. Radiat. Transf. 2014, 144, 68–85. [Google Scholar] [CrossRef][Green Version]
- Martin, W.G.; Hasekamp, O.P. A demonstration of adjoint methods for multi-dimensional remote sensing of the atmosphere and surface. J. Quant. Spectrosc. Radiat. Transf. 2018, 204, 215–231. [Google Scholar] [CrossRef]
- Wiscombe, W. The delta-M method: Rapid yet accurate radiative flux calculations for strongly asymmetric phase functions. J. Atmos. Sci. 1977, 34, 1408–1422. [Google Scholar] [CrossRef]
- Nakajima, T.; Tanaka, M. Algorithms for radiative intensity calculations in moderately thick atmos using a truncation approximation. J. Quant. Spectrosc. Radiat. Transf. 1988, 40, 51–69. [Google Scholar] [CrossRef]
- Henyey, L.C.; Greenstein, J.L. Diffuse radiation in the Galaxy. Astrophys. J. 1941, 93, 70. [Google Scholar] [CrossRef]
- Mie, G. Beitraege zur Optik trueber Medien, speziell kolloidaler Metalloesungen. Ann. Phys. 1908, 330, 377–445. [Google Scholar] [CrossRef]
- Bodhaine, B.A.; Wood, N.B.; Dutton, E.G.; Slusser, J.R. On rayleigh optical depth calculations. J. Atmos. Ocean. Technol. 1999, 16, 1854–1861. [Google Scholar] [CrossRef]
- Anderson, G.; Clough, S.; Kneizys, F.; Chetwynd, J.; Shettle, E. AFGL Atmospheric Constituent Profiles (0–120 km); AFGL-TR-86-0110; Air Force Geophysics Laboratory: Hanscom Air Force Base, MA, USA, 1986.
- Alexandrov, M.; Marshak, A.; Ackerman, A. Cellular Statistical Models of Broken Cloud Fields. Part I: Theory. J. Atmos. Sci. 2010, 67, 2125–2151. [Google Scholar] [CrossRef]
- García, V.M.; Sasi, S.; Efremenko, D.S.; Doicu, A.; Loyola, D. Linearized radiative transfer models for retrieval of cloud parameters from EPIC/DSCOVR measurements. J. Quant. Spectrosc. Radiat. Transf. 2018, 213, 241–251. [Google Scholar] [CrossRef]
- Platt, U.; Stutz, J. Differential Optical Absorption Spectroscopy: Principles and Applications; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Doicu, A.; Efremenko, D.; Trautmann, T. An analysis of the short-characteristic method for the spherical harmonic discrete ordinate method (SHDOM). J. Quant. Spectrosc. Radiat. Transf. 2013, 119, 114–127. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FAA | FA | |||
|---|---|---|---|---|
| FAA | FA | |||
|---|---|---|---|---|
| FAA | FA | |||
|---|---|---|---|---|
| Partial Derivatives | |||
|---|---|---|---|
| (Figure 6) | 1:16 | 27:12 | 138:19 |
| (Figure 7) | 1:47 | 32:34 | 153:26 |
| 0:32 | 2:21 | 2:24 | |
| 0:31 | 2:20 | 2:20 |
| FAA | FA | ||||
|---|---|---|---|---|---|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doicu, A.; Efremenko, D.S. Linearizations of the Spherical Harmonic Discrete Ordinate Method (SHDOM). Atmosphere 2019, 10, 292. https://doi.org/10.3390/atmos10060292
Doicu A, Efremenko DS. Linearizations of the Spherical Harmonic Discrete Ordinate Method (SHDOM). Atmosphere. 2019; 10(6):292. https://doi.org/10.3390/atmos10060292
Chicago/Turabian StyleDoicu, Adrian, and Dmitry S. Efremenko. 2019. "Linearizations of the Spherical Harmonic Discrete Ordinate Method (SHDOM)" Atmosphere 10, no. 6: 292. https://doi.org/10.3390/atmos10060292
APA StyleDoicu, A., & Efremenko, D. S. (2019). Linearizations of the Spherical Harmonic Discrete Ordinate Method (SHDOM). Atmosphere, 10(6), 292. https://doi.org/10.3390/atmos10060292