Algorithm for Improved QPE over Complex Terrain Using Cloud-to-Ground Lightning Occurrences



{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Lightning-Precipitation Relationship (LPR)
1.2. Summary of Previous Work
2. Materials and Methods
- Update the error matrix and the covariance matrix
- Update the Kalman gain matrix
- Update the model parameter vector estimation
- Prepare covariance for the next time-step
- Produce updated precipitation estimatewhere is the a posteriori error covariance matrix. In order to apply the Kalman filter there is a need to impose an initial condition and the covariance matrix Q and R. The value of determines the initial estimation rate of the Kalman filter and is normally used as a diagonal matrix with large values.
3. Results
3.1. Time and Space Neighboring
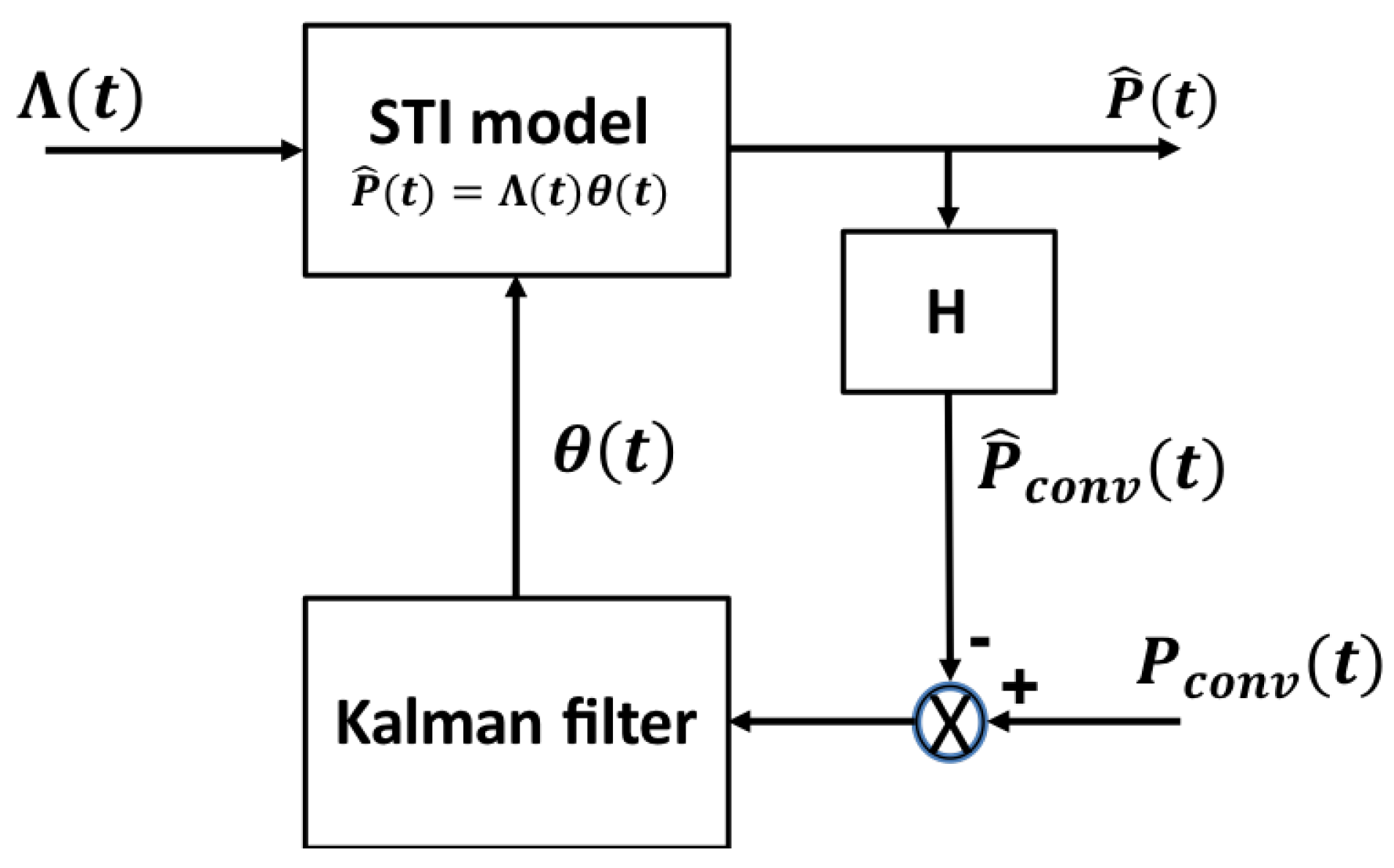
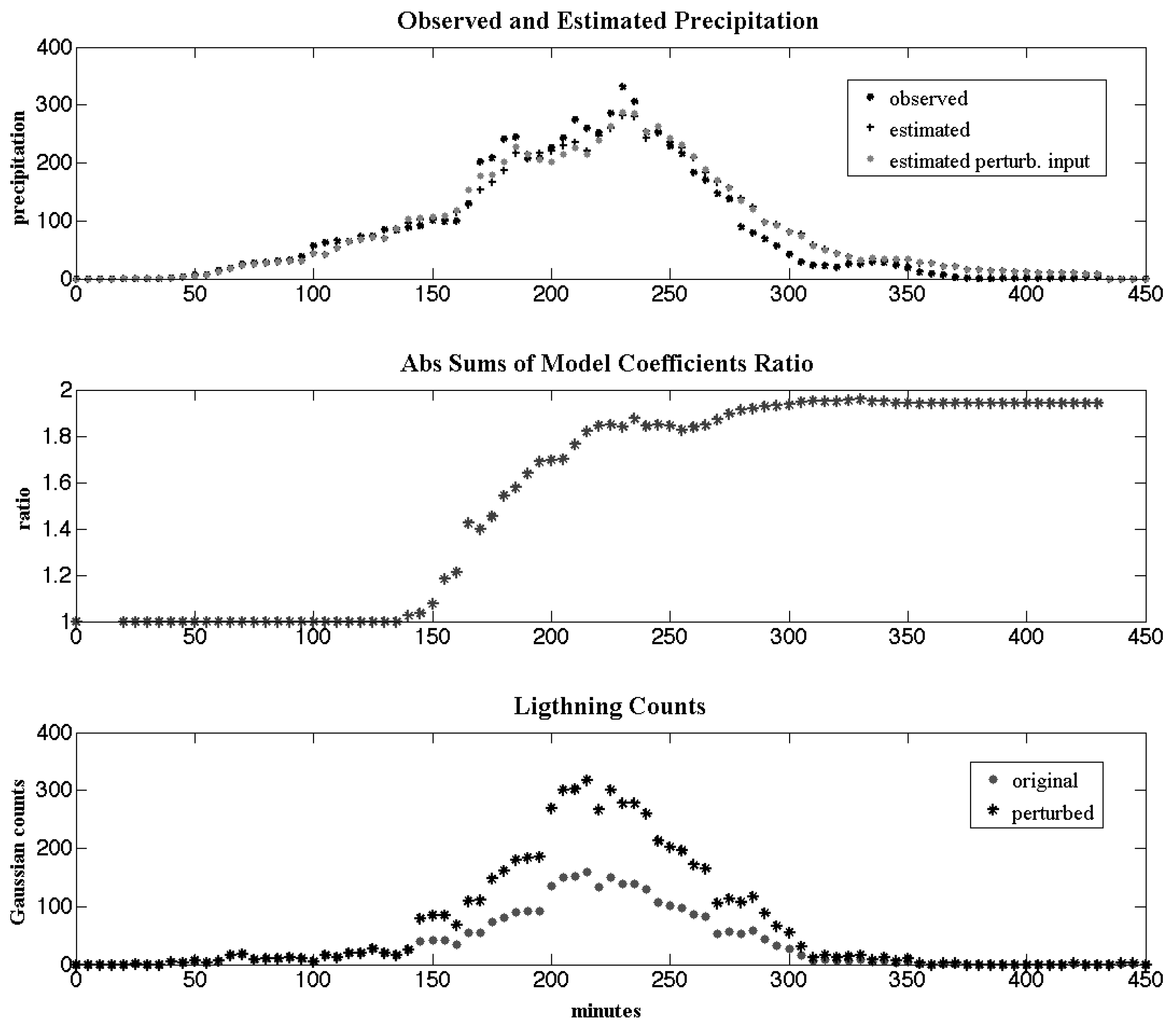
3.2. Kalman Filter Testing Model Robustness
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Adam, J.C.; Lettenmaier, D.P. Adjustment of global gridded precipitation for systematic bias. J. Geophys. Res. Atmos. 2003, 108. [Google Scholar] [CrossRef]
- Yang, B.; Qin, C.; Wang, J.; He, M.; Melvin, T.M.; Osborn, T.J.; Briffa, K.R. A 3500-year tree-ring record of annual precipitation on the northeastern Tibetan Plateau. Proc. Natl. Acad. Sci. USA 2014, 111, 2903–2908. [Google Scholar] [CrossRef]
- Grecu, M.; Krajewski, W. A large-sample investigation of statistical procedures for radar-based short-term quantitative precipitation forecasting. J. Hydrol. 2000, 239, 69–84. [Google Scholar] [CrossRef]
- Todd, M.C.; Kidd, C.; Kniveton, D.; Bellerby, T.J. A combined satellite infrared and passive microwave technique for estimation of small-scale rainfall. J. Atmos. Ocean. Technol. 2001, 18, 742–755. [Google Scholar] [CrossRef]
- Krajewski, W.; Smith, J. Radar hydrology: Rainfall estimation. Adv. Water Resour. 2002, 25, 1387–1394. [Google Scholar] [CrossRef]
- Bauer, P.; Thorpe, A.; Brunet, G. The quiet revolution of numerical weather prediction. Nature 2015, 525, 47. [Google Scholar] [CrossRef]
- Sorooshian, S.; Lawford, R.; Try, P.; Rossow, W.; Roads, J.; Polcher, J.; Sommeria, G.; Schiffer, R. Water and energy cycles: Investigating the links. World Meteorol. Organ. Bull. 2005, 54, 58–64. [Google Scholar]
- Herrera, S.; Gutiérrez, J.M.; Ancell, R.; Pons, M.; Frías, M.; Fernández, J. Development and analysis of a 50-year high-resolution daily gridded precipitation dataset over Spain (Spain02). Int. J. Climatol. 2012, 32, 74–85. [Google Scholar] [CrossRef]
- Brandes, E.A.; Vivekanandan, J.; Wilson, J.W. A comparison of radar reflectivity estimates of rainfall from collocated radars. J. Atmos. Ocean. Technol. 1999, 16, 1264–1272. [Google Scholar] [CrossRef]
- Habib, E.; Krajewski, W. Uncertainty analysis of the TRMM ground-validation radar-rainfall products: Application to the TEFLUN-B field campaign. J. Appl. Meteorol. 2002, 41. [Google Scholar] [CrossRef]
- Morin, E.; Gabella, M. Radar-based quantitative precipitation estimation over Mediterranean and dry climate regimes. J. Geophys. Res. Atmos. 2007, 112. [Google Scholar] [CrossRef]
- Villarini, G.; Mandapaka, P.V.; Krajewski, W.F.; Moore, R.J. Rainfall and sampling uncertainties: A rain gauge perspective. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Doswell, C.A., III; Brooks, H.E.; Maddox, R.A. Flash flood forecasting: An ingredients-based methodology. Weather Forecast. 1996, 11, 560–581. [Google Scholar] [CrossRef]
- Morin, E.; Maddox, R.A.; Goodrich, D.C.; Sorooshian, S. Radar Z–R relationship for summer monsoon storms in Arizona. Weather Forecast. 2005, 20, 672–679. [Google Scholar] [CrossRef]
- Crosson, W.L.; Duchon, C.E.; Raghavan, R.; Goodman, S.J. Assessment of rainfall estimates using a standard ZR relationship and the probability matching method applied to composite radar data in central Florida. J. Appl. Meteorol. 1996, 35, 1203–1219. [Google Scholar] [CrossRef]
- Fulton, R.A. Sensitivity of WSR-88D rainfall estimates to the rain-rate threshold and rain gauge adjustment: A flash flood case study. Weather Forecast. 1999, 14, 604–624. [Google Scholar] [CrossRef]
- Stellman, K.M.; Fuelberg, H.E.; Garza, R.; Mullusky, M. An examination of radar and rain gauge–derived mean areal precipitation over Georgia watersheds. Weather Forecast. 2001, 16, 133–144. [Google Scholar] [CrossRef]
- Xie, P.; Arkin, P.A. An intercomparison of gauge observations and satellite estimates of monthly precipitation. J. Appl. Meteorol. 1995, 34, 1143–1160. [Google Scholar] [CrossRef]
- Kursinski, A.L.; Zeng, X. Areal estimation of intensity and frequency of summertime precipitation over a midlatitude region. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Kitzmiller, D.; Miller, D.; Fulton, R.; Ding, F. Radar and multisensor precipitation estimation techniques in National Weather Service hydrologic operations. J. Hydrol. Eng. 2013, 18, 133–142. [Google Scholar] [CrossRef]
- Zhang, J.; Qi, Y.; Langston, C.; Kaney, B.; Howard, K. A real-time algorithm for merging radar QPEs with rain gauge observations and orographic precipitation climatology. J. Hydrometeorol. 2014, 15, 1794–1809. [Google Scholar] [CrossRef]
- Minjarez-Sosa, C.; Castro, C.L.; Cummins, K.L.; Krider, E.P.; Waissman, J. Improved QPE in complex terrain using cloud-toground lightning data: A case study for the 2005 monsoon in southern Arizona. J. Hydrometeorol. 2012, 13, 1855–1873. [Google Scholar] [CrossRef]
- Minjarez-Sosa, C.M.; Castro, C.L.; Cummins, K.L.; Waissman, J.; Adams, D.K. An improved QPE over complex terrain employing cloud-to-ground lightning occurrences. J. Appl. Meteorol. Climatol. 2017, 56, 2489–2507. [Google Scholar] [CrossRef]
- Mehran, A.; AghaKouchak, A.A. Capabilities of satellite precipitation datasets to estimate heavy precipitation rates at different temporal accumulations. Hydrol. Process. 2014, 28, 2262–2270. [Google Scholar] [CrossRef]
- Hsu, K.l.; Gao, X.; Sorooshian, S.; Gupta, H.V. Precipitation estimation from remotely sensed information using artificial neural networks. J. Appl. Meteorol. 1997, 36, 1176–1190. [Google Scholar] [CrossRef]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A method that produces global precipitation estimates from passive microwave and infrared data at high spatial and temporal resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM multisatellite precipitation analysis (TMPA): Quasi-global, multiyear, combined-sensor precipitation estimates at fine scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Zahraei, A.; Hsu, K.L.; Sorooshian, S.; Gourley, J.J.; Hong, Y.; Behrangi, A. Short-term quantitative precipitation forecasting using an object-based approach. J. Hydrol. 2013, 483, 1–15. [Google Scholar] [CrossRef]
- Workman, E.; Reynolds, S.; Byers, H. Structure and electrification. Thunderst. Electr. 1953, 139–149. [Google Scholar]
- Battan, L. Some factors governing precipitation and lightning from convective clouds. J. Atmos. Sci. 1965, 22, 79–85. [Google Scholar] [CrossRef]
- Piepgrass, M.; Krider, E.; Moore, C. Lightning and surface rainfall during florida thunderstorms. J. Geophys. Res. 1992, 87, 11195–11201. [Google Scholar] [CrossRef]
- Tapia, A.; Smith, J.; Dixon, M. Estimation of convective rainfall from lightning observations. Appl. Meteorol. 1998, 37, 1497–1509. [Google Scholar] [CrossRef]
- Petersen, W.; Rutledge, S. On the relationship between cloud-to-ground lightning and convective rainfall. Geophys. Res. 1998, 103, 14025–14040. [Google Scholar] [CrossRef]
- Gungle, B.; Krider, E. Cloud-to-ground lightning and surface rainfall in warm-season Florida thunderstorms. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Soula, S.; Chauzy, S. Some aspects of the correlation between lightning and rain activities in thunderstorms. Atmos. Res. 2001, 56, 355–373. [Google Scholar] [CrossRef]
- Soula, S.; van der Velde, O.; Montanyà, J.; Neubert, T.; Chanrion, O.; Ganot, M. Analysis of thunderstorm and lightning activity associated with sprites observed during the EuroSprite campaigns: Two case studies. Atmos. Res. 2009, 91, 514–528. [Google Scholar] [CrossRef]
- Alpuim, T.; Barbosa, S. The Kalman filter in the estimation of area precipitation. Environ. Off. J. Int. Environ. Soc. 1999, 10, 377–394. [Google Scholar] [CrossRef]
- Ushio, T.; Sasashige, K.; Kubota, T.; Shige, S.; Okamoto, K.I.; Aonashi, K.; Inoue, T.; Takahashi, N.; Iguchi, T.; Kachi, M.; et al. A Kalman filter approach to the Global Satellite Mapping of Precipitation (GSMaP) from combined passive microwave and infrared radiometric data. J. Meteorol. Soc. Jpn. 2009, 87, 137–151. [Google Scholar] [CrossRef]
- Godard, D. Channel Equalization Using a Kalman Filter for Fast Data Transmission. IBM J. Res. Dev. 1974, 18, 267–273. [Google Scholar] [CrossRef]
- Rutledge, S.A.; MacGorman, D.R. Cloud-to-ground lightning activity in the 10–11 June 1985 mesoscale convective system observed during the Oklahoma–Kansas PRE-STORM project. Mon. Weather Rev. 1988, 116, 1393–1408. [Google Scholar] [CrossRef]
- Kouchak, A.A.; Behrangi, A.; Sorooshian, S.; Hsu, K.; Amitai, E. Evaluation of satellite-retrieved extreme precipitation rates across the central United States. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Minjarez-Sosa, C.; Waissman, J.; Castro, C.L.; Adams, D. Algorithm for Improved QPE over Complex Terrain Using Cloud-to-Ground Lightning Occurrences. Atmosphere 2019, 10, 85. https://doi.org/10.3390/atmos10020085
Minjarez-Sosa C, Waissman J, Castro CL, Adams D. Algorithm for Improved QPE over Complex Terrain Using Cloud-to-Ground Lightning Occurrences. Atmosphere. 2019; 10(2):85. https://doi.org/10.3390/atmos10020085
Chicago/Turabian StyleMinjarez-Sosa, Carlos, Julio Waissman, Christopher L. Castro, and David Adams. 2019. "Algorithm for Improved QPE over Complex Terrain Using Cloud-to-Ground Lightning Occurrences" Atmosphere 10, no. 2: 85. https://doi.org/10.3390/atmos10020085
APA StyleMinjarez-Sosa, C., Waissman, J., Castro, C. L., & Adams, D. (2019). Algorithm for Improved QPE over Complex Terrain Using Cloud-to-Ground Lightning Occurrences. Atmosphere, 10(2), 85. https://doi.org/10.3390/atmos10020085