Evaluation of a Ground Penetrating Radar to Map the Root Architecture of HLB-Infected Citrus Trees




Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Site
2.2. Equipment
2.3. Experimental Design
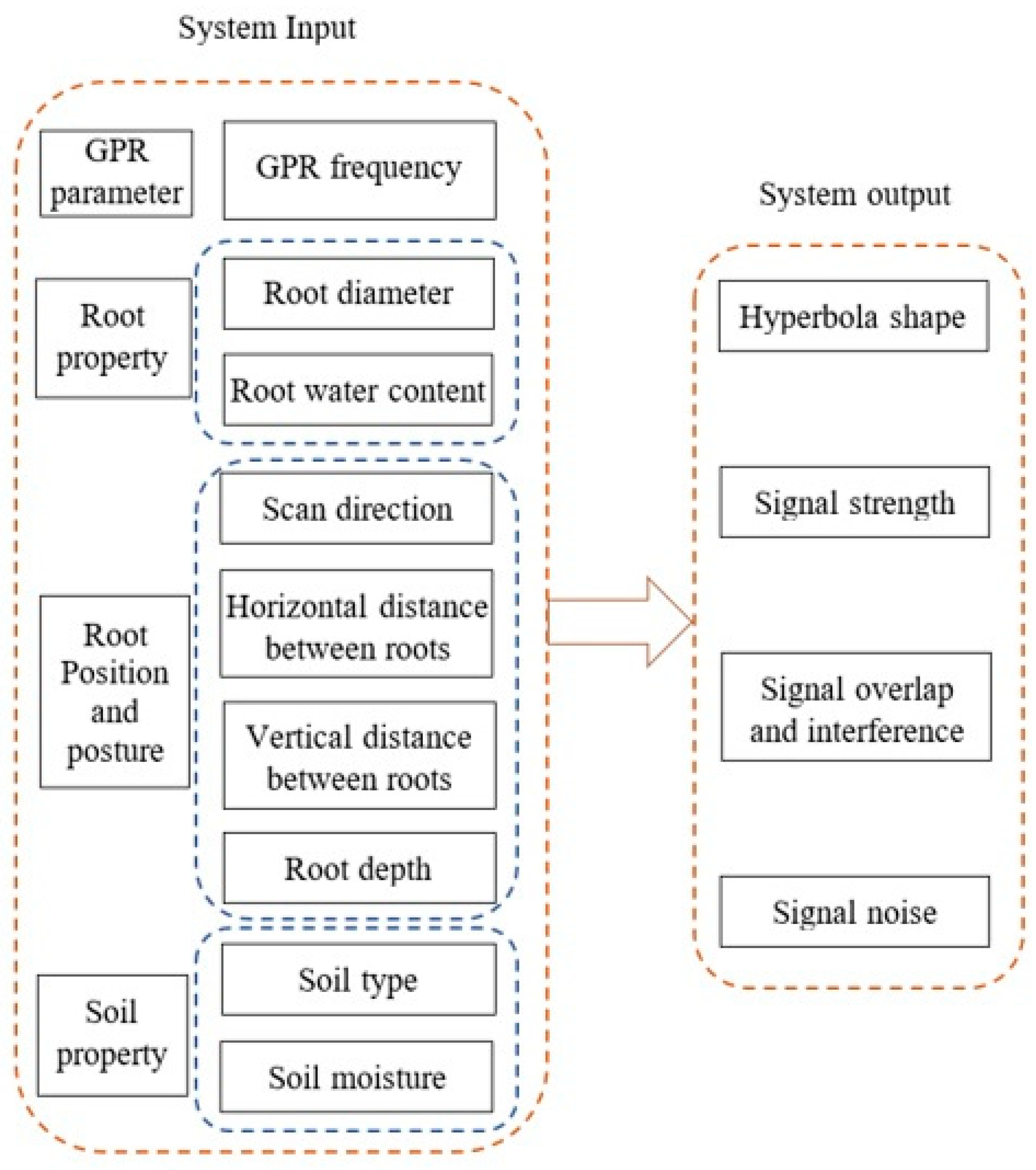
2.3.1. Experimental Factors
2.3.2. Experiments
Experiments I–VII: Single-Factor Experiments
Experiment VIII: Simulated Tree Root Experiment
Experiment IX: Tree Root Field Experiment
2.4. Data Processing
3. Results
3.1. Effects of Root Properties on Detection Accuracy
3.2. Effect of Survey Line Direction on Root Detection
3.3. Effect of Horizontal Distance between Roots on Detection Accuracy
3.4. Effect of Vertical Distance between Roots on Detection Accuracy
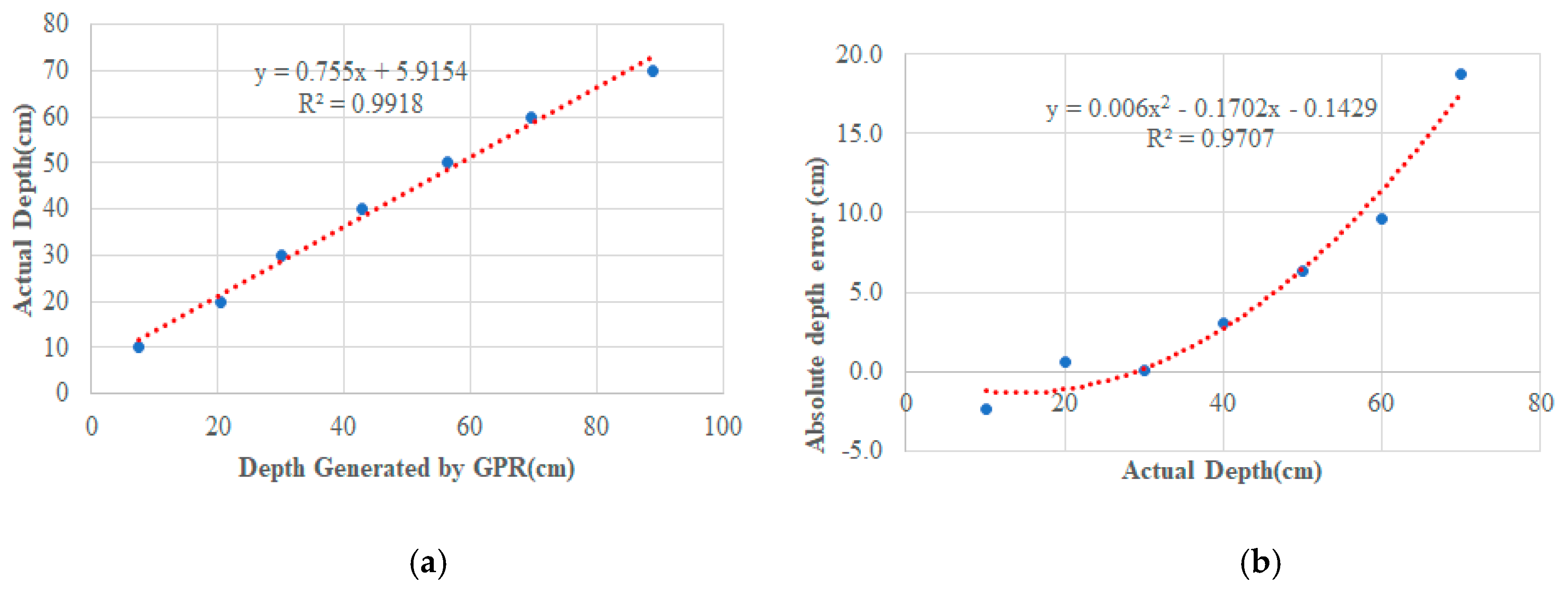
3.5. Effect of Root Depth on Root Detection Accuracy
3.6. Effect of Soil Moisture on Root Detection Accuracy
3.7. Simulated Tree Root Experiment
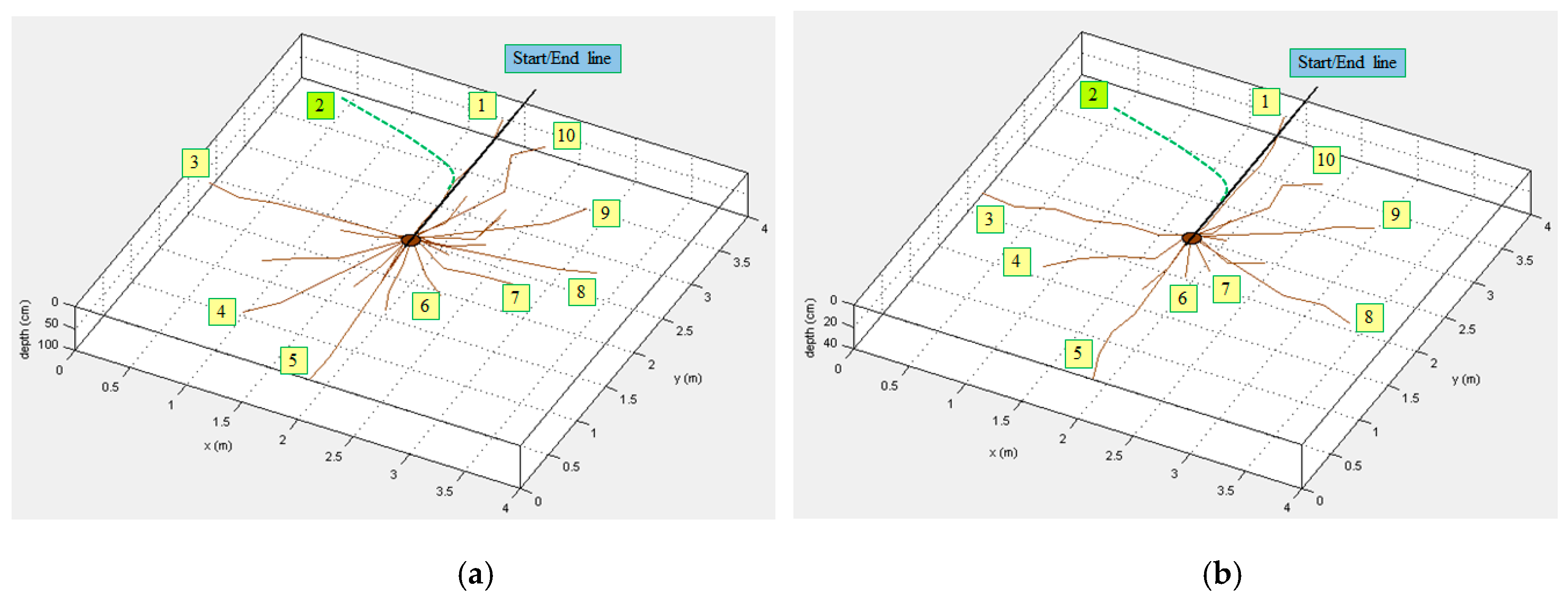
3.8. Tree Root Field Experiment with an HLB-Infected Citrus Tree
4. Discussion
4.1. Effect of Water Content on Root Detection
4.2. Effect of Root Diameter on Root Detection
4.3. Effect of Survey Line Direction on Root Detection
4.4. Effect of GPR Resolution on Root Detection
4.5. Field Tree Root Experiments
5. Conclusions
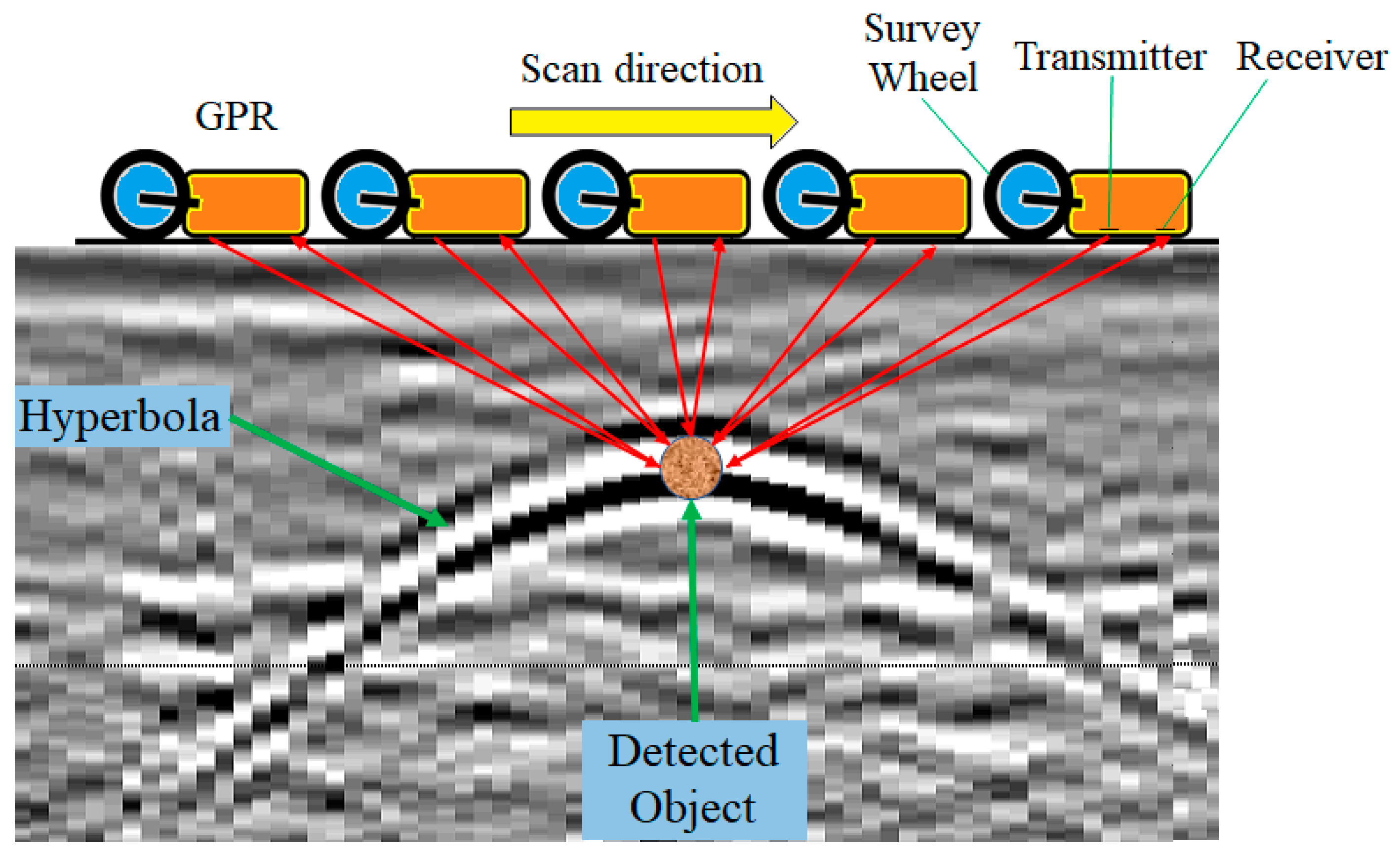
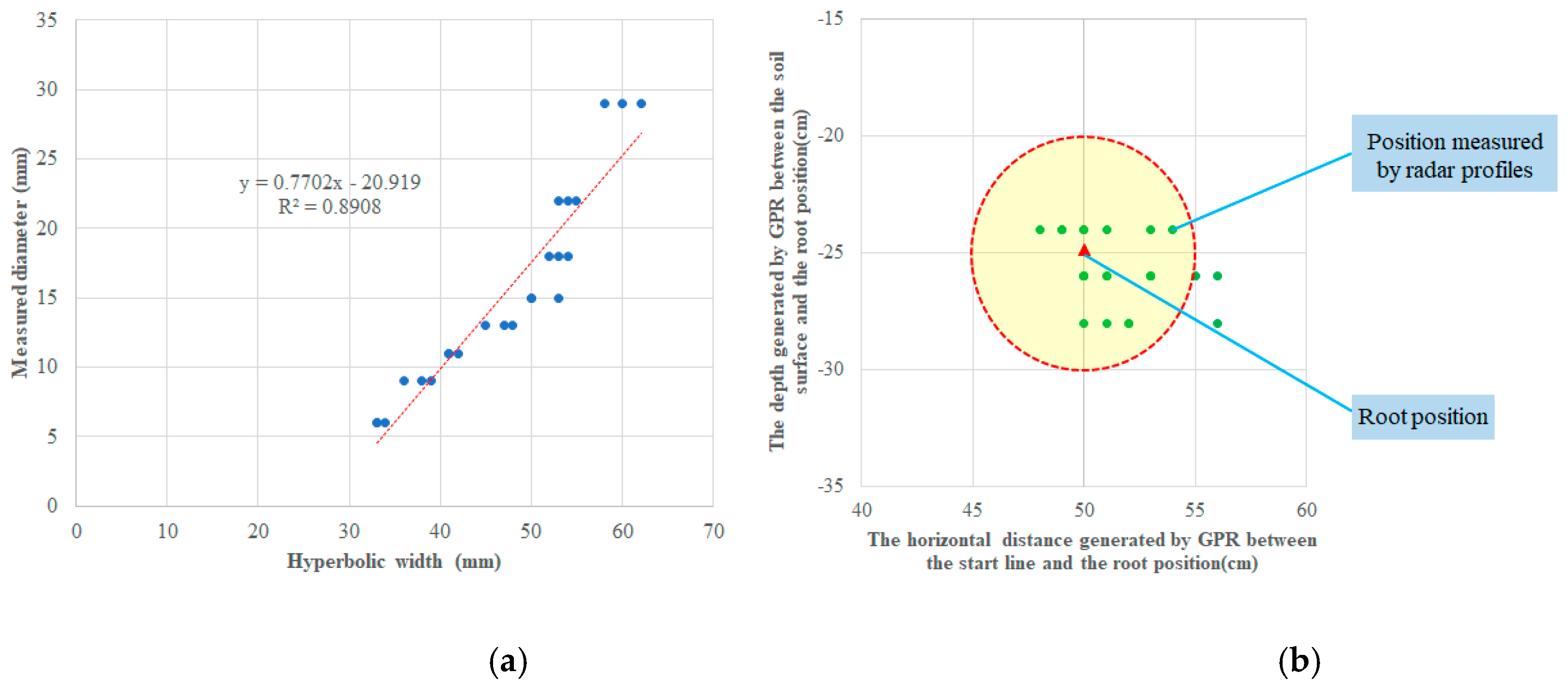
- In a controlled environment, GPR is suitable for monitoring the roots distributed in shallow soil layers with a diameter that is larger than 6 mm. The diameter of the root influences the width of the hyperbola and the intensity (strength) of the signal. As the root diameter increases, the hyperbola widens, and consequently the reflected signal is strong. The relationship between diameter and hyperbolic widths was linear under the conditions of this study for roots with a diameter of 0.5 to 5 cm.
- The live and dead roots were clearly distinguished in the radar profiles. The ability of the GPR system to distinguish between the live and dead roots is valuable for studying the effects of diseases, such as HLB or soil-borne pests and pathogens, on tree root growth.
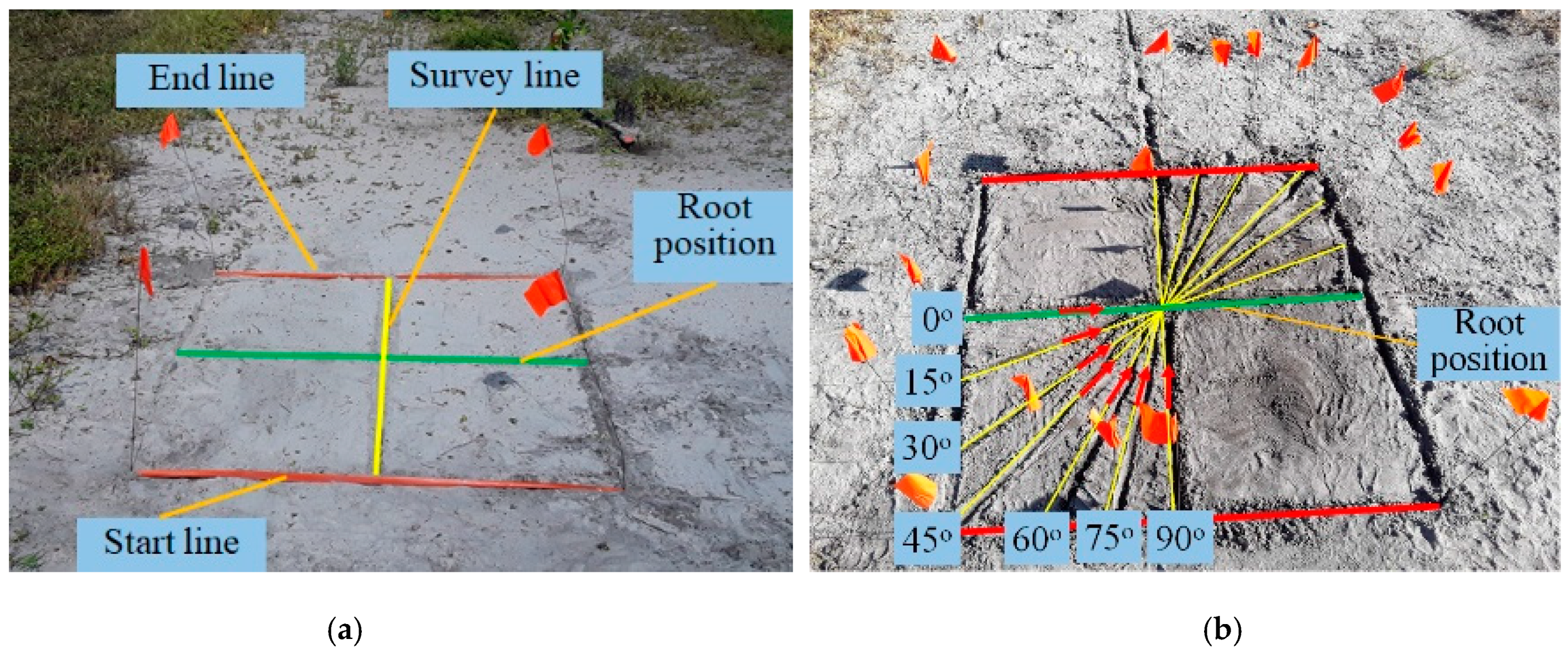
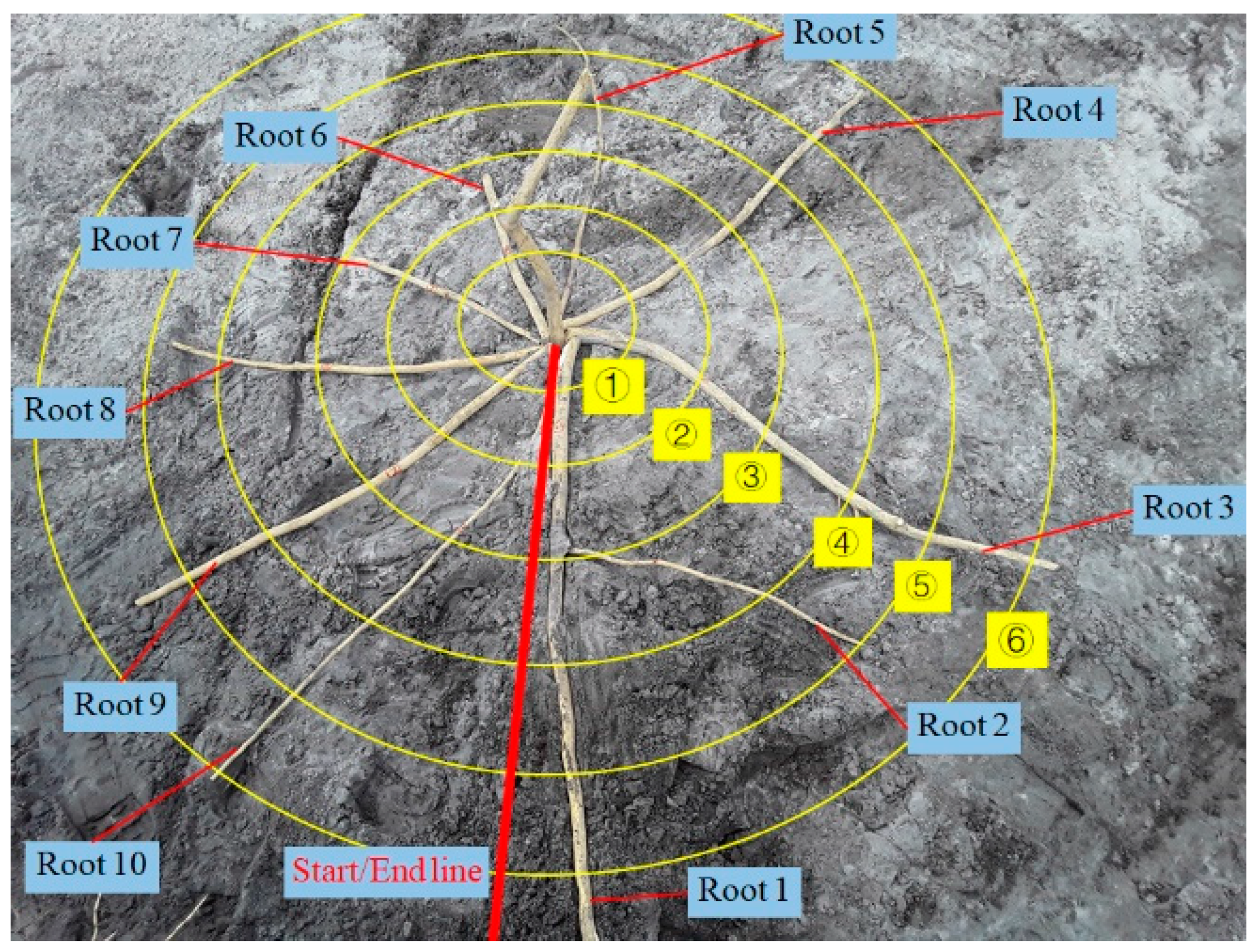
- The direction of the survey (scan) lines strongly affects detection accuracy; keeping the survey lines perpendicular to the roots can significantly increase the GPR detection accuracy. It was difficult to identify the hyperbolas when the angle between the survey line and the direction of the root was less than 45°. Combining concentric circles with orthogonal grids would greatly improve the detection accuracy of the GPR because roots grow in various directions.
- Two roots that were located in proximity cannot be clearly detected by 1600 MHz GPR when their horizontal distance is less than 10 cm and their vertical distance is less than 5 cm.
- Soil water content determines the dielectric constant, which affects GPR signal generation and root detection accuracy. Sandy soil (typical of southwest Florida citrus groves) has a rapid and high water infiltration rate, which may affect GPR performance.
- Artificial intelligence and machine learning have been utilized to correctly identify and classify objects, such as crops [44], crop pests [45,46,47], and diseases [48,49,50,51,52]. A similar approach could be adopted to automate the root detection procedure by analyzing and identify “root” hyperbolas that are produced by GPR, by utilizing artificial intelligence and machine learning.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alvarez, S.; Rohrig, E.; Solis, D.; Thomas, M.H. Citrus Greening Disease (Huanglongbing) in Florida: Economic Impact, Management and the Potential for Biological Control. Agric. Res. 2016, 5, 109–118. [Google Scholar] [CrossRef]
- Cheng, C.Z.; Zeng, J.W.; Zhong, Y.; Yan, H.X.; Jiang, B.; Zhong, G.Y. Research progress on citrus huanglongbing disease. Acta Hortic. Sin. 2013, 40, 1656–1668. [Google Scholar]
- Gottwald, T.R.; da Graça, J.V.; Bassanezi, R.B. Citrus Huanglongbing: The pathogen and its impact. Plant Health Prog. 2007, 8, 31. [Google Scholar] [CrossRef]
- Court, C.D.; Hodges, A.W.; Rahmani, M.; Spreen, T.H. Economic Contributions of the Florida Citrus Industry in 2015–2016. Available online: https://fred.ifas.ufl.edu/pdf/economic-impact-analysis/Economic_Impacts_of_the_Florida_Citrus_Industry_2015_16.pdf (accessed on 9 May 2018).
- Stansly, P.A.; Arevalo, H.A.; Qureshi, J.A.; Jones, M.M.; Hendricks, K.; Roberts, P.D.; Roka, F.M. Vector control and foliar nutrition to maintain economic sustainability of bearing citrus in Florida groves affected by huanglongbing. Pest Manag. Sci. 2014, 70, 415–426. [Google Scholar] [CrossRef] [PubMed]
- Bowman, K.D.; Faulkner, L.; Kesinger, M. New Citrus Rootstocks Released by USDA 2001–2010: Field Performance and Nursery Characteristics. HortScience 2016, 51, 1208–1214. [Google Scholar] [CrossRef]
- Ghatrehsamani, S.; Abdulridha, J.; Balafoutis, A.; Zhang, X.; Ehsani, R.; Ampatzidis, Y. Development and evaluation of a mobile thermotherapy technology for in-field treatment of Huanglongbing (HLB) affected trees. Biosyst. Eng. 2019, 182, 1–15. [Google Scholar] [CrossRef]
- Jia, Z.; Ehsani, R.; Zheng, J.; Xu, L.; Zhou, H.; Ding, R. Heating characteristics and field control effect of rapid citrus huanglongbing steam heat treatment. Trans. CSAE 2017, 33, 219–225. [Google Scholar]
- Pertiwi, C.; Leavitt, S.; Ehsani, R.; Pelletier, W. Heat Transfer Model Development for Thermal Treatment of Huanglongbing-infected Citrus Trees. In Proceedings of the 2014 ASABE and CSBE/SCGAB Annual International Meeting, Montreal, QC, Canada, 13–16 July 2014; ASABE: St. Joseph, MI, USA, 2014. [Google Scholar]
- Johnson, E.; Graham, J. Roots Health in the Age of HLB. 2015. Available online: https://crec.ifas.ufl.edu/extension/trade_journals/2015/2015_August_root.pdf (accessed on 2 February 2019).
- Aritua, V.; Achor, D.; Gmitter, G.F.; Albrigo, G.; Wang, N. Transcriptional and Microscopic Analyses of Citrus Stem and Root Responses to Candidatus Liberibacter asiaticus Infection. PLoS ONE 2013, 8, e73742. [Google Scholar] [CrossRef]
- Day, S.D.; Wiseman, P.E.; Dickinson, S.B.; Harris, J.R. Contemporary Concepts of Root System Architecture of Urban Trees. Arboric. Urban For. 2010, 36, 149–159. [Google Scholar]
- Nadezhdina, N.; Čermák, J. Instrumental methods for studies of structure and function of root systems of large trees. J. Exp. Bot. 2003, 54, 1511–1521. [Google Scholar] [CrossRef]
- Judd, L.A.; Jackson, B.E.; Fonteno, W.C. Advancements in Root Growth Measurement Technologies and Observation Capabilities for Container-Grown Plants. Plants 2015, 4, 369–392. [Google Scholar] [CrossRef] [PubMed]
- Malamy, J. Intrinsic and environmental response pathways that regulate root system architecture. Plant Cell Environ. 2005, 28, 67–77. [Google Scholar] [CrossRef] [PubMed]
- Pierret, A.; Moran, C.; Doussan, C. Conventional detection methodology is limiting our ability to understand the roles and functions of fine roots. New Phytol. 2005, 166, 967–980. [Google Scholar] [CrossRef] [PubMed]
- Amato, M.; Basso, B.; Celano, G.; Bitella, G.; Morelli, G.; Rossi, R. In situ detection of tree root distribution and biomass by multi-electrode resistivity imaging. Tree Physiol. 2008, 28, 1441–1448. [Google Scholar] [CrossRef] [PubMed]
- Danjon, F.; Reubens, B. Assessing and analyzing 3D architecture of woody root systems, a review of methods and applications in tree and soil stability, resource acquisition and allocation. Plant Soil 2008, 303, 1–34. [Google Scholar] [CrossRef]
- Tracy, S.; Black, C.; Roberts, J.; Sturrock, C.; Mairhofer, S.; Craigon, J.; Mooney, S. Quantifying the impact of soil compaction on root system architecture in tomato (Solanum lycopersicum) by X-ray micro-computed tomography. Ann. Bot. 2012, 110, 511–519. [Google Scholar] [CrossRef] [PubMed]
- Alani, A.M.; Bianchini, C.L.; Lantini, L.; Tosti, F.; Benedetto, A. Mapping the root system of matured trees using ground penetrating radar. In Proceedings of the 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018. [Google Scholar]
- Jol, H.M. Ground Penetrating Radar: Theory and Application; Elsevier Science: Oxford, UK, 2009. [Google Scholar]
- Guo, L.; Chen, J.; Cui, X.; Fan, B.; Lin, H. Application of ground penetrating radar for coarse root detection and quantification: A review. Plant Soil 2013, 362, 1–23. [Google Scholar] [CrossRef]
- Molon, M.; Boyce, J.; Arain, M. Quantitative, nondestructive estimates of coarse root biomass in a temperate pine forest using 3-D ground-penetrating radar (GPR). J. Geophys. Res. Biogeosci. 2017, 122, 80–102. [Google Scholar] [CrossRef]
- Bain, J.; Day, F.; Butnor, J. Experimental Evaluation of Several Key Factors Affecting Root Biomass Estimation by 1500 MHz Ground-Penetrating Radar. Remote Sens. 2017, 9, 1337. [Google Scholar] [CrossRef]
- Tanikawa, T.; Hirano, Y.; Dannoura, M.; Yamase, K.; Aono, K.; Ishii, M.; Igarashi, T.; Ikeno, H.; Kanazawa, Y. Root orientation can affect detection accuracy of ground-penetrating radar. Plant Soil 2013, 373, 317–327. [Google Scholar] [CrossRef]
- Tanikawa, T.; Dannoura, M.; Yamase, K.; Ikeno, H.; Hirano, Y. Reply to: “Comment on root orientation can affect detection accuracy of ground-penetrating radar”. Plant Soil 2014, 380, 445–450. [Google Scholar] [CrossRef]
- Guo, L.; Wu, Y.; Chen, J.; Hirano, Y.; Tanikawa, T.; Li, W.; Cui, X. Calibrating the impact of root orientation on root quantification using ground-penetrating radar. Plant Soil 2015, 395, 289–305. [Google Scholar] [CrossRef]
- Liu, Q.; Cui, X.; Liu, X.; Chen, J.; Chen, X.; Cao, X. Detection of Root Orientation Using Ground-Penetrating Radar. IEEE Trans. Geosci. Remote Sens. 2018, 56, 93–104. [Google Scholar] [CrossRef]
- Pasolli, E.; Melgani, F.; Donelli, M. Automatic Analysis of GPR Images: A Pattern-Recognition Approach. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2206–2217. [Google Scholar] [CrossRef]
- Janning, R.; Busche, A.; Horvath, T.; Schmidt-Thieme, T. Buried pipe localization using an iterative geometric clustering on GPR data. Artif. Intell. Rev. 2014, 42, 403–425. [Google Scholar] [CrossRef]
- Birkenfeld, S. Automatic detection of reflexion hyperbolas in GPR data with neural networks. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010; pp. 1189–1194. [Google Scholar]
- Li, W.; Cui, X.; Guo, L.; Chen, J.; Chen, X.; Cao, X. Tree Root Automatic Recognition in Ground Penetrating Radar Profiles Based on Randomized Hough Transform. Remote Sens. 2016, 8, 430. [Google Scholar] [CrossRef]
- Freeland, R.S. Imaging the lateral roots of the orange tree using three-dimensional GPR. J. Environ. Eng. Geophys. 2015, 20, 235–244. [Google Scholar] [CrossRef]
- Freeland, R.S. Surveying the Near-Surface Fibrous Citrus Root System of the Orange Tree With 3-D GPR. Appl. Eng. Agric. 2016, 32, 145–153. [Google Scholar]
- Tan, P.Y.; Jim, C.Y. Greening Cities: Forms and Functions; Springer: Singapore, 2017; p. 295. [Google Scholar]
- Peterson, C.; Soares, T.; Torbert, E.; Herrera, I.; Scow, K.; Gaudin, A.C.M. Drip Irrigation Effect on Soil Function, Root Systems and Productivity in Organic Tomato and Corn. In Proceedings of the Organic Agriculture Research Symposium, Pacific Grove, CA, USA, 20 January 2016; pp. 1–7. [Google Scholar]
- Morgan, K.T.; Obreza, T.A.; Scholberg, J.M.S. Orange tree fibrous root length distribution in space and time. J. Am. Soc. Hortic. Sci. 2007, 132, 262–269. [Google Scholar] [CrossRef]
- United States Climate Data—Version 2.3—Programming and Design by Your Weather Service-World Climate-Weernetwerk. 2018. Available online: https://www.usclimatedata.com/climate/immokalee/florida/united-states/usfl0216 (accessed on 5 February 2019).
- United States of Agriculture—Natural Resources Conservation Service—Official Soil Series Descriptions. 2018. Available online: https://soilseries.sc.egov.usda.gov/OSD_Docs/I/IMMOKALEE.html/ (accessed on 5 February 2019).
- Guo, L.; Cui, X.; Chen, J. Sensitive factors analysis in using GPR for detecting plant roots based on forward modeling. Prog. Geophys 2012, 27, 1745–1763. [Google Scholar]
- Barton, C.; Montagu, K. Detection of tree roots and determination of root diameters by ground penetrating radar under optimal conditions. Tree Physiol. 2004, 24, 1323–1331. [Google Scholar] [CrossRef] [PubMed]
- Cui, X.; Chen, J.; Shen, J.; Cao, X.; Chen, X.; Zhu, X. Modeling tree root diameter and biomass by ground-penetrating radar. Sci. China-Earth Sci. 2011, 54, 711–719. [Google Scholar] [CrossRef]
- Mucciardi, T. Tree Radar (Radar Imaging for Non-Invasive Assessment of Tree and Root Health). 2004. Available online: http://treeradar.com/TRUSystem.htm (accessed on 5 January 2019).
- Ampatzidis, Y.; Partel, V. UAV-based High Throughput Phenotyping in Citrus Utilizing Multispectral Imaging and Artificial Intelligence. Remote Sens. 2019, 11, 410. [Google Scholar] [CrossRef]
- Partel, V.; Kakarla, S.C.; Ampatzidis, Y. Development and Evaluation of a Low-Cost and Smart Technology for Precision Weed Management Utilizing Artificial Intelligence. Comput. Electron. Agric. 2019, 157, 339–350. [Google Scholar] [CrossRef]
- Partel, V.; Nunes, L.; Stansley, P.; Ampatzidis, Y. Automated Vision-based System for Monitoring Asian Citrus Psyllid in Orchards Utilizing Artificial Intelligence. Comput. Electron. Agric. 2019, 162, 328–336. [Google Scholar] [CrossRef]
- Luvisi, A.; Ampatzidis, Y.; De Bellis, L. Plant pathology and information technology: Opportunity and uncertainty in pest management. Sustainability 2016, 8, 831. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ampatzidis, Y.; Ehsani, R.; de Castro, A. Evaluating the Performance of Spectral Features and Multivariate Analysis Tools to Detect Laurel Wilt Disease and Nutritional Deficiency in Avocado. Comput. Electron. Agric. 2018, 155, 203–2011. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ehsani, R.; Abd-Elrahman, A.; Ampatzidis, Y. A Remote Sensing technique for detecting laurel wilt disease in avocado in presence of other biotic and abiotic stresses. Comput. Electron. Agric. 2019, 156, 549–557. [Google Scholar] [CrossRef]
- Cruz, A.C.; Luvisi, A.; De Bellis, L.; Ampatzidis, Y. X-FIDO: An Effective Application for Detecting Olive Quick Decline Syndrome with Novel Deep Learning Methods. Front. Plant Sci. 2017, 8, 1741. [Google Scholar] [CrossRef]
- Cruz, A.; Ampatzidis, Y.; Pierro, R.; Materazzi, A.; Panattoni, A.; De Bellis, L.; Luvisi, A. Detection of Grapevine Yellows Symptoms in Vitis vinifera L. with Artificial Intelligence. Comput. Electron. Agric. 2019, 157, 63–76. [Google Scholar] [CrossRef]
- Abdulridha, J.; Batuman, O.; Ampatzidis, Y. UAV-based Remote Sensing Technique to Detect Citrus Canker Disease Utilizing Hyperspectral Imaging and Machine Learning. Remote Sens. 2019, 11, 1373. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Root No. | Live or Dead | Diameter (mm) | Radar Profile | Width of Hyperbola (mm) | Actual Distance (cm) | Distance Generated by GPR (cm) | Relative Error of Distance (%) | Actual Depth (cm) | Depth Generated by GPR (cm) | Relative Error of Depth (%) |
|---|---|---|---|---|---|---|---|---|---|---|
| Root 1 | Live | 6 |  | 33 | 50 | 56 | 12 | −25 | −28 | 12 |
| 33 | 50 | 55 | 10 | −25 | −26 | 4 | ||||
| 34 | 50 | 56 | 12 | −25 | −26 | 4 | ||||
| Root 2 | Live | 9 |  | 38 | 50 | 53 | 6 | −25 | −26 | 4 |
| 39 | 50 | 53 | 6 | −25 | −26 | 4 | ||||
| 36 | 50 | 54 | 8 | −25 | −24 | −4 | ||||
| Root 3 | Live | 11 |  | 41 | 50 | 50 | 0 | −25 | −26 | 4 |
| 42 | 50 | 50 | 0 | −25 | −26 | 4 | ||||
| 41 | 50 | 50 | 0 | −25 | −28 | 12 | ||||
| Root 4 | Live | 13 |  | 47 | 50 | 50 | 0 | −25 | −26 | 4 |
| 48 | 50 | 48 | −4 | −25 | −24 | −4 | ||||
| 45 | 50 | 50 | 0 | −25 | −26 | 4 | ||||
| Root 5 | Live | 15 |  | 53 | 50 | 50 | 0 | −25 | −24 | −4 |
| 50 | 50 | 53 | 6 | −25 | −24 | −4 | ||||
| 50 | 50 | 51 | 2 | −25 | −24 | −4 | ||||
| Root 6 | Live | 18 |  | 53 | 50 | 52 | 4 | −25 | −28 | 12 |
| 54 | 50 | 52 | 4 | −25 | −28 | 12 | ||||
| 52 | 50 | 51 | 2 | −25 | −26 | 4 | ||||
| Root 7 | Live | 22 |  | 55 | 50 | 51 | 2 | −25 | −28 | 12 |
| 54 | 50 | 53 | 6 | −25 | −26 | 4 | ||||
| 53 | 50 | 51 | 2 | −25 | −26 | 4 | ||||
| Root 8 | Live | 29 |  | 58 | 50 | 50 | 0 | −25 | −24 | −4 |
| 62 | 50 | 49 | −2 | −25 | −24 | −4 | ||||
| 60 | 50 | 49 | −2 | −25 | −24 | −4 | ||||
| Root 9 | Dead | 30 |  | 50 | - | −25 | − | |||
| Mean value | 51.5 | −25.8 | ||||||||
| Standard deviation | 2.2 | 1.5 |
| Scan Angle | 0° | 15° | 30° | 45° | 60° | 75° | 90° |
|---|---|---|---|---|---|---|---|
| Radar profile |  |  |  |  |  |  |  |
| Detection effect | No hyperbola | No hyperbola | Not well-defined hyperbola | Not well-defined hyperbola | Incomplete hyperbola | Incomplete hyperbola | Well-defined hyperbola |
| Actual Horizontal Distance | 3 cm | 5 cm | 10 cm | 15 cm | 20 cm |
|---|---|---|---|---|---|
| Radar profile |  |  |  |  |  |
| Detection effect | 1 root detected | 1 root detected | 2 roots detected | 2 roots detected | 2 roots detected |
| Actual Vertical Distance | 1 cm | 3 cm | 5 cm | 10 cm | 15 cm |
|---|---|---|---|---|---|
| Radar profile |  |  |  |  |  |
| Detection effect | 1 root detected | 1 root detected | 2 roots detected | 2 roots detected | 2 roots detected |
| Actual Depth | 10 cm | 20 cm | 30 cm | 40 cm | 50 cm | 60 cm | 70 cm |
|---|---|---|---|---|---|---|---|
| Radar profile |  |  |  |  |  |  |  |
| Effect on hyperbola detection | Upper and lower edges well-defined | Upper and lower edges well-defined | Upper and lower edges well-defined | Lower edge not well-defined | Lower edge not well-defined | Upper and lower edges not well-defined | Upper and lower edges not well-defined |
| Detected distance | 8 cm | 20 cm | 30 cm | 43 cm | 56 cm | 70 cm | 89 cm |
| Actual Soil Moisture (%) | Radar Profile Using Different Soil Type and Dielectric Constant | ||
|---|---|---|---|
| Soil Moisture Content 20% | Soil Moisture Content 13% | Soil Moisture Content 9% | |
| 16 |  |  |  |
| 11 |  |  |  |
| 6 |  |  |  |
| Survey Circles | Radar profile | |
|---|---|---|
| 900 MHz | 1600 MHz | |
| Circle 1 |  | |
| Circle 2 | ||
| Circle 3 | ||
| Circle 4 | ||
| Circle 5 | ||
| Circle 6 | ||
| Root NO. | 10 9 8 7 6 5 4 3 2 1 | 10 9 8 7 6 5 4 3 2 1 |
| 900 MHz | |||||||
| Survey circles | TO | TP | FN | FP | Accuracy | Precision | Recall |
| Circle 1 | 9 | 9 | 0 | 3 | 75% | 75% | 100% |
| Circle 2 | 9 | 9 | 0 | 2 | 82% | 82% | 100% |
| Circle 3 | 8 | 7 | 1 | 2 | 70% | 78% | 88% |
| Circle 4 | 8 | 8 | 0 | 1 | 89% | 89% | 100% |
| Circle 5 | 8 | 8 | 0 | 1 | 89% | 89% | 100% |
| Circle 6 | 3 | 3 | 0 | 2 | 60% | 60% | 100% |
| SUM | 45 | 44 | 1 | 11 | 79% | 81% | 98% |
| 1600 MHz | |||||||
| Survey circles | TO | TP | FN | FP | Accuracy | Precision | Recall |
| Circle 1 | 9 | 9 | 0 | 2 | 82% | 82% | 100% |
| Circle 2 | 9 | 9 | 0 | 1 | 90% | 90% | 100% |
| Circle 3 | 8 | 7 | 1 | 1 | 78% | 88% | 88% |
| Circle 4 | 8 | 8 | 0 | 1 | 89% | 89% | 100% |
| Circle 5 | 8 | 8 | 0 | 1 | 89% | 89% | 100% |
| Circle 6 | 3 | 3 | 0 | 0 | 100% | 100% | 100% |
| SUM | 45 | 44 | 1 | 6 | 86% | 88% | 98% |
| Frequency | RTO | RTP | RFN | RFP | Accuracy | Precision | Recall |
|---|---|---|---|---|---|---|---|
| 900 MHz | 10 | 9 | 1 | 10 | 45% | 47% | 90% |
| 1600 MHz | 10 | 9 | 1 | 4 | 64% | 69% | 90% |
| Frequency | RRTO | RRTP | RRFN | RRFP | Accuracy | Precision | Recall |
|---|---|---|---|---|---|---|---|
| 1600 MHz | 7 | 7 | 0 | 1 | 87.5% | 87.5% | 100% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Derival, M.; Albrecht, U.; Ampatzidis, Y. Evaluation of a Ground Penetrating Radar to Map the Root Architecture of HLB-Infected Citrus Trees. Agronomy 2019, 9, 354. https://doi.org/10.3390/agronomy9070354
Zhang X, Derival M, Albrecht U, Ampatzidis Y. Evaluation of a Ground Penetrating Radar to Map the Root Architecture of HLB-Infected Citrus Trees. Agronomy. 2019; 9(7):354. https://doi.org/10.3390/agronomy9070354
Chicago/Turabian StyleZhang, Xiuhua, Magda Derival, Ute Albrecht, and Yiannis Ampatzidis. 2019. "Evaluation of a Ground Penetrating Radar to Map the Root Architecture of HLB-Infected Citrus Trees" Agronomy 9, no. 7: 354. https://doi.org/10.3390/agronomy9070354
APA StyleZhang, X., Derival, M., Albrecht, U., & Ampatzidis, Y. (2019). Evaluation of a Ground Penetrating Radar to Map the Root Architecture of HLB-Infected Citrus Trees. Agronomy, 9(7), 354. https://doi.org/10.3390/agronomy9070354