
Design and Experimental Operation of a Swing-Arm Orchard Sprayer

 ,
, 

Abstract
1. Introduction
2. Materials and Methods
2.1. Design of Orchard Swing-Arm Sprayer
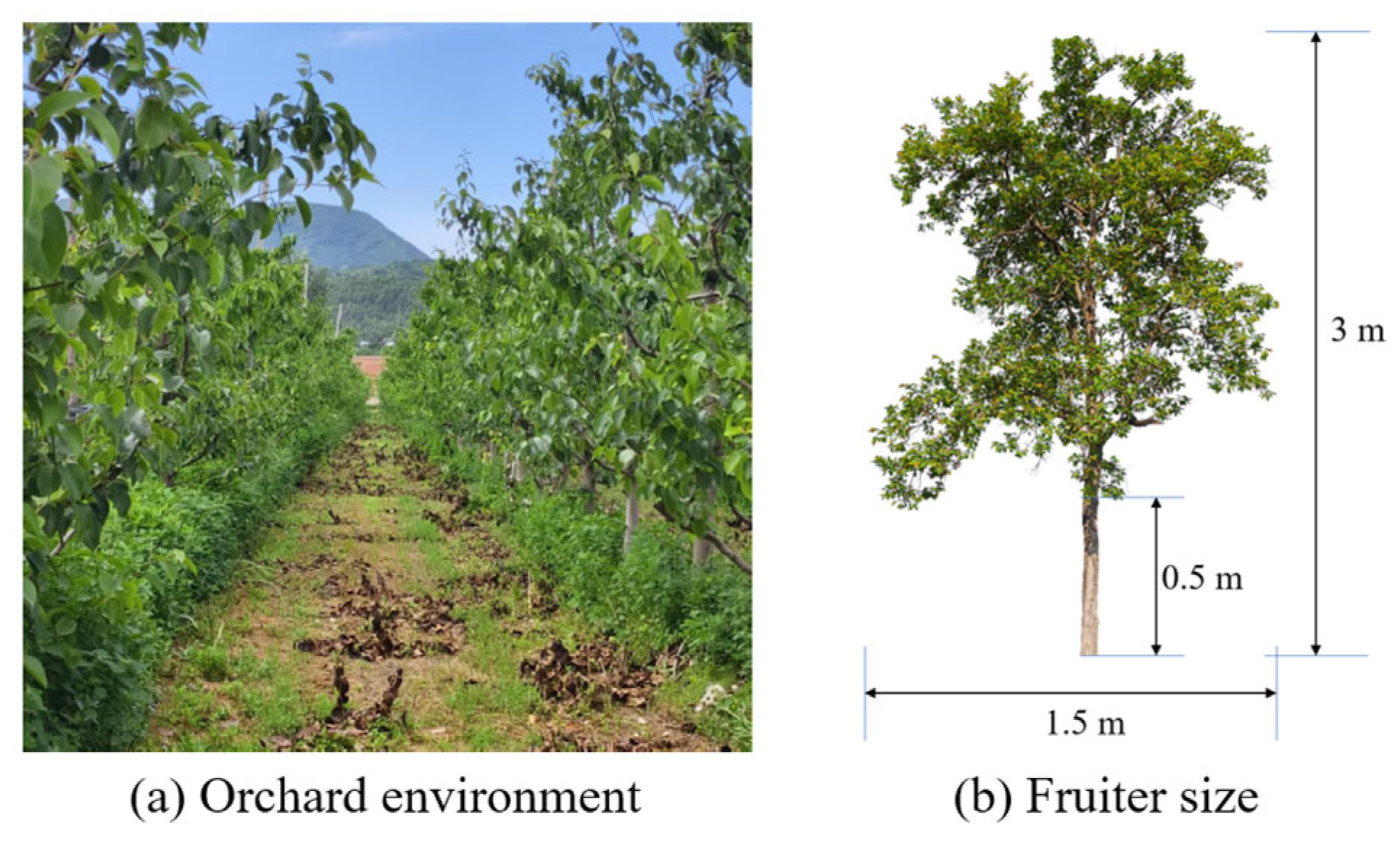
2.1.1. Background of Orchard Planting and Pesticide Application
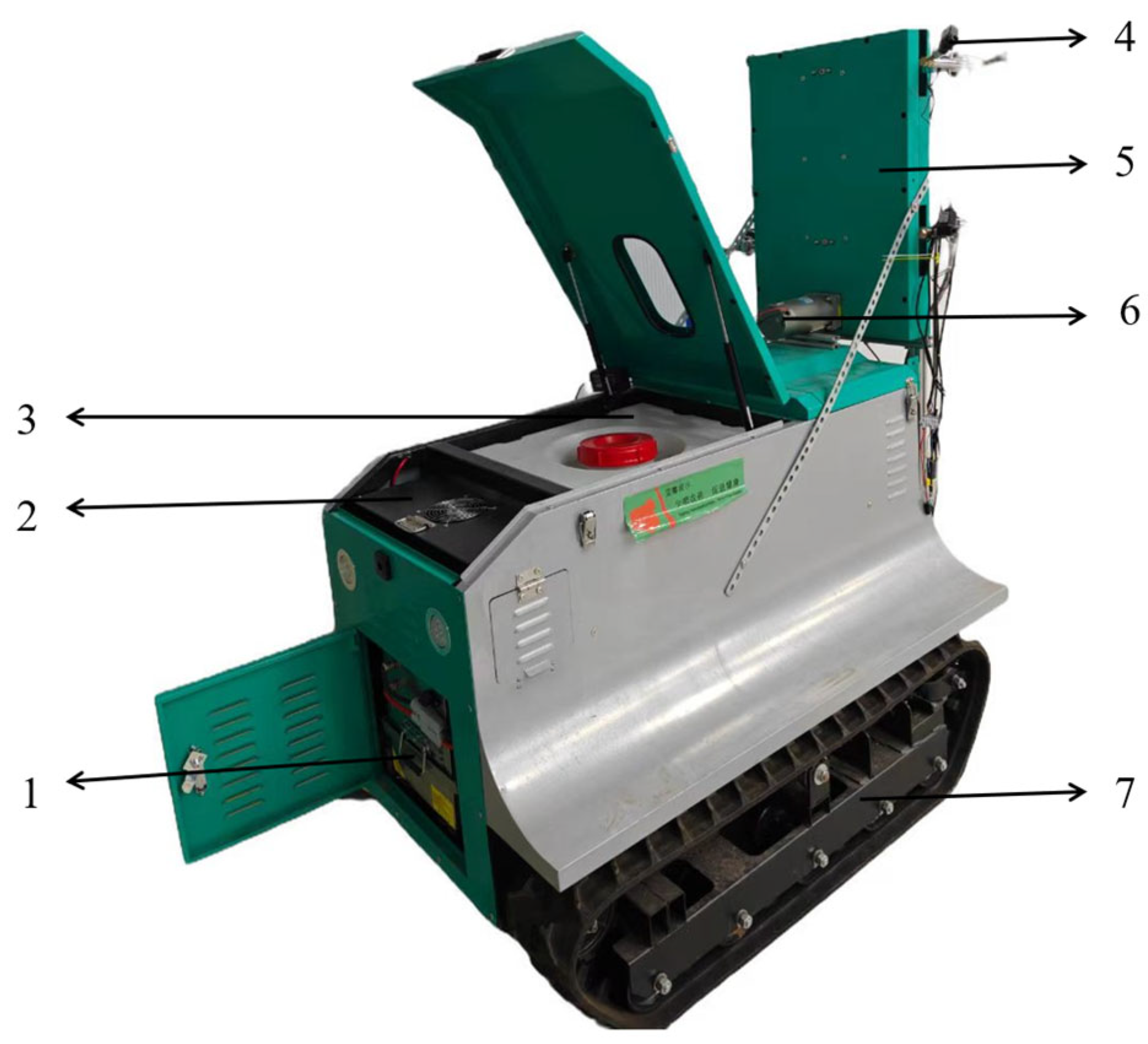
2.1.2. Scheme Design of the Whole Machine
2.1.3. Design and Selection of Key Components
- (1)
- Walking system
- (2)
- Spraying system
- (3)
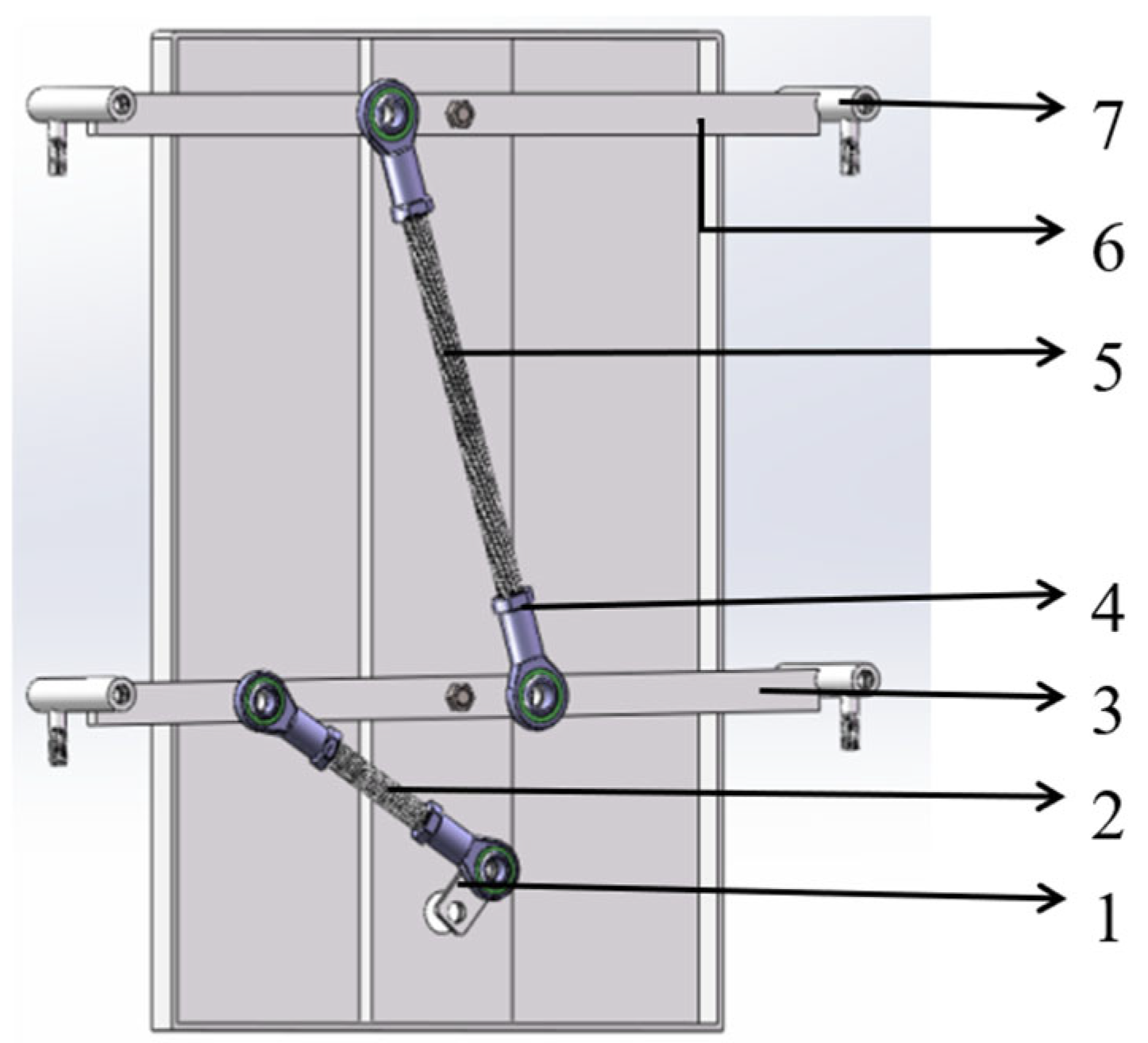
- Swing-arm mechanism
2.2. Design of Spray System
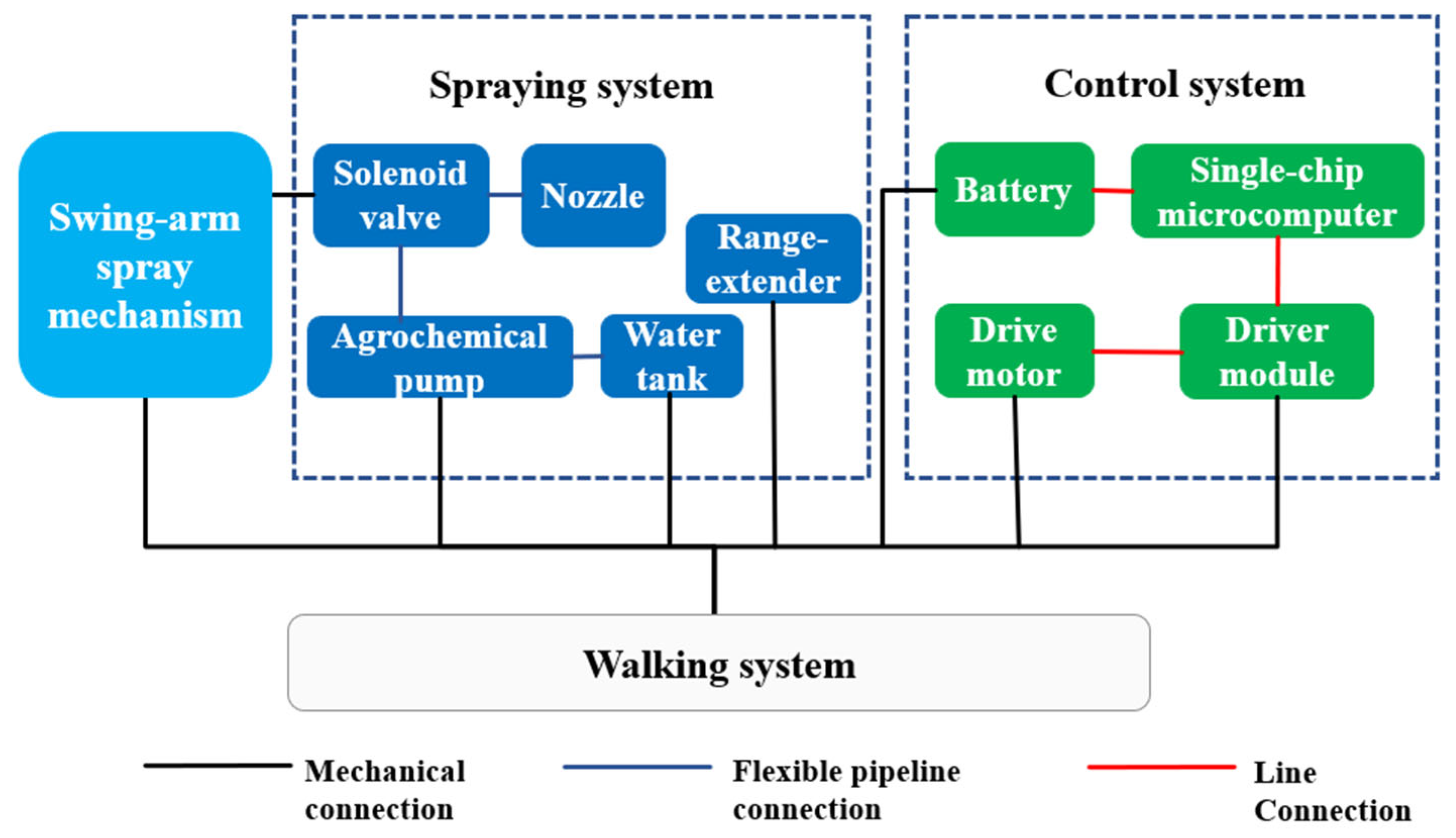
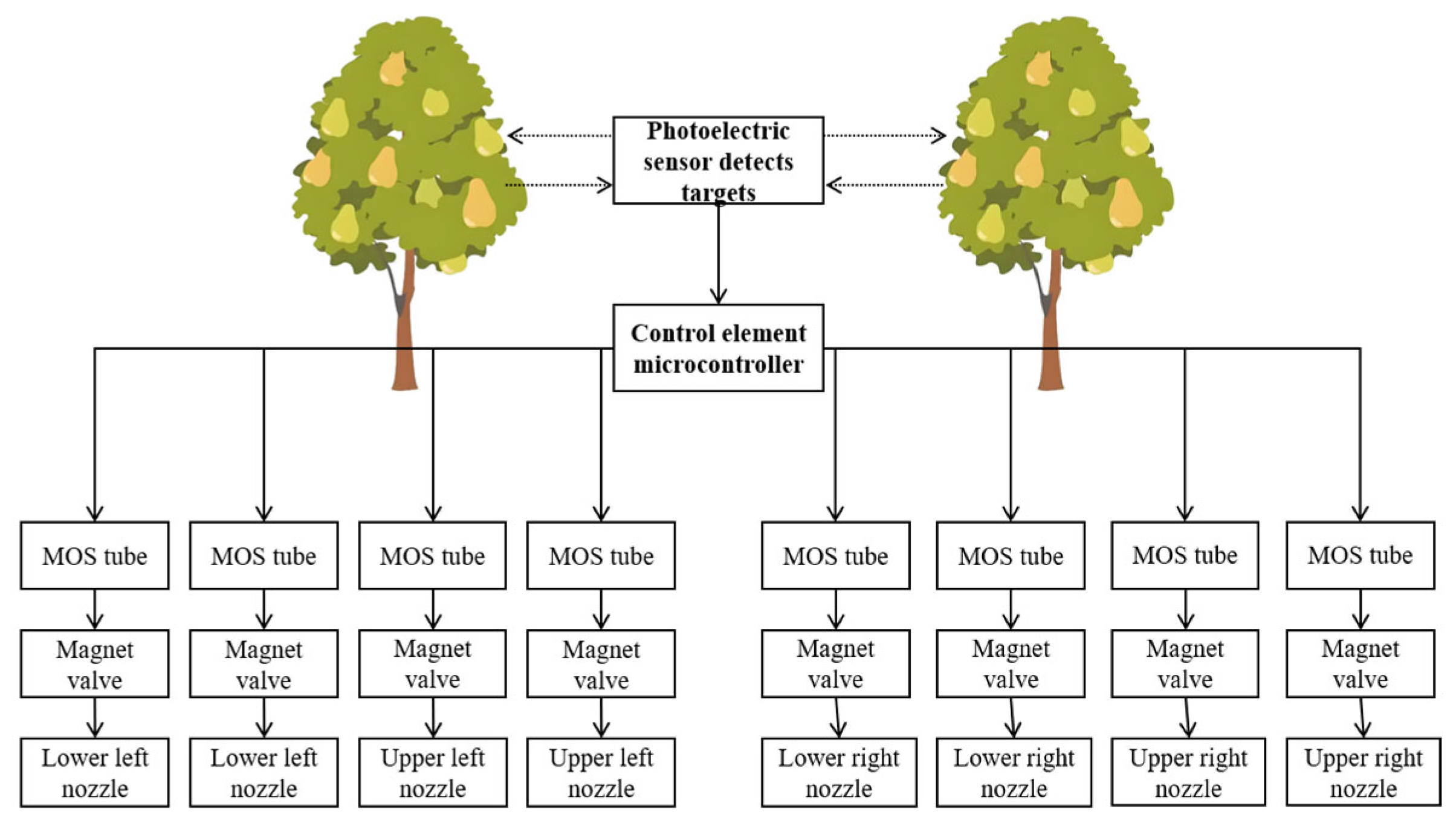
2.2.1. Overall Architecture
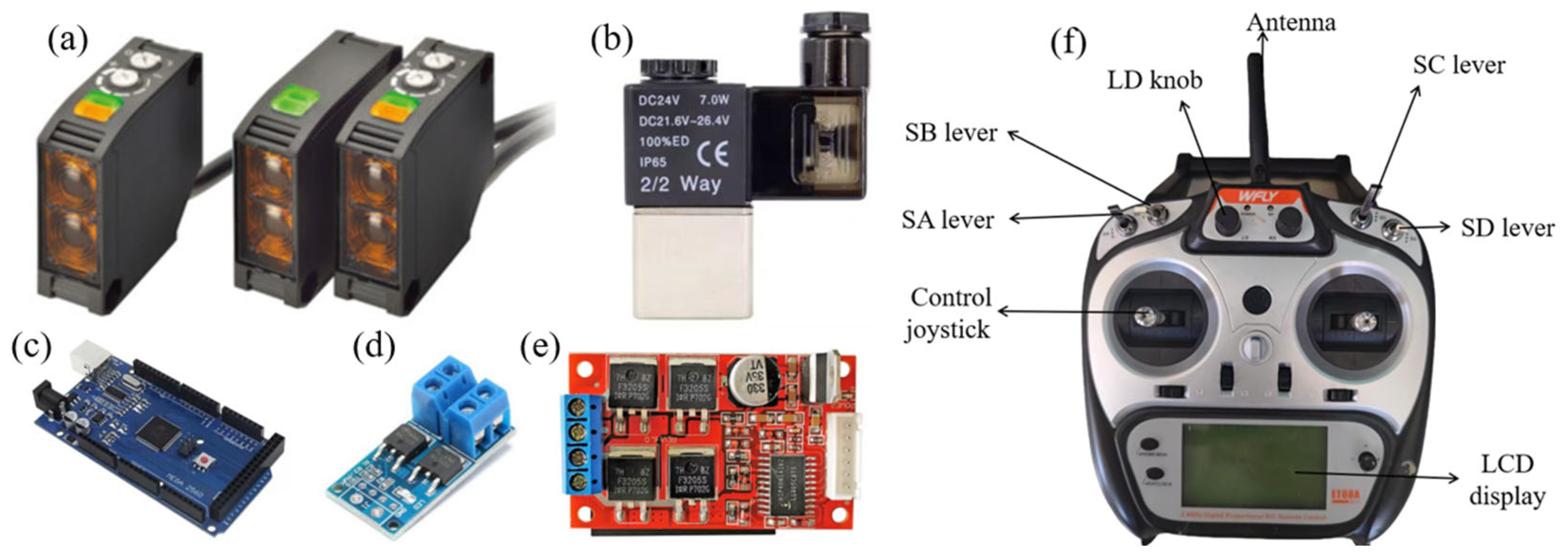
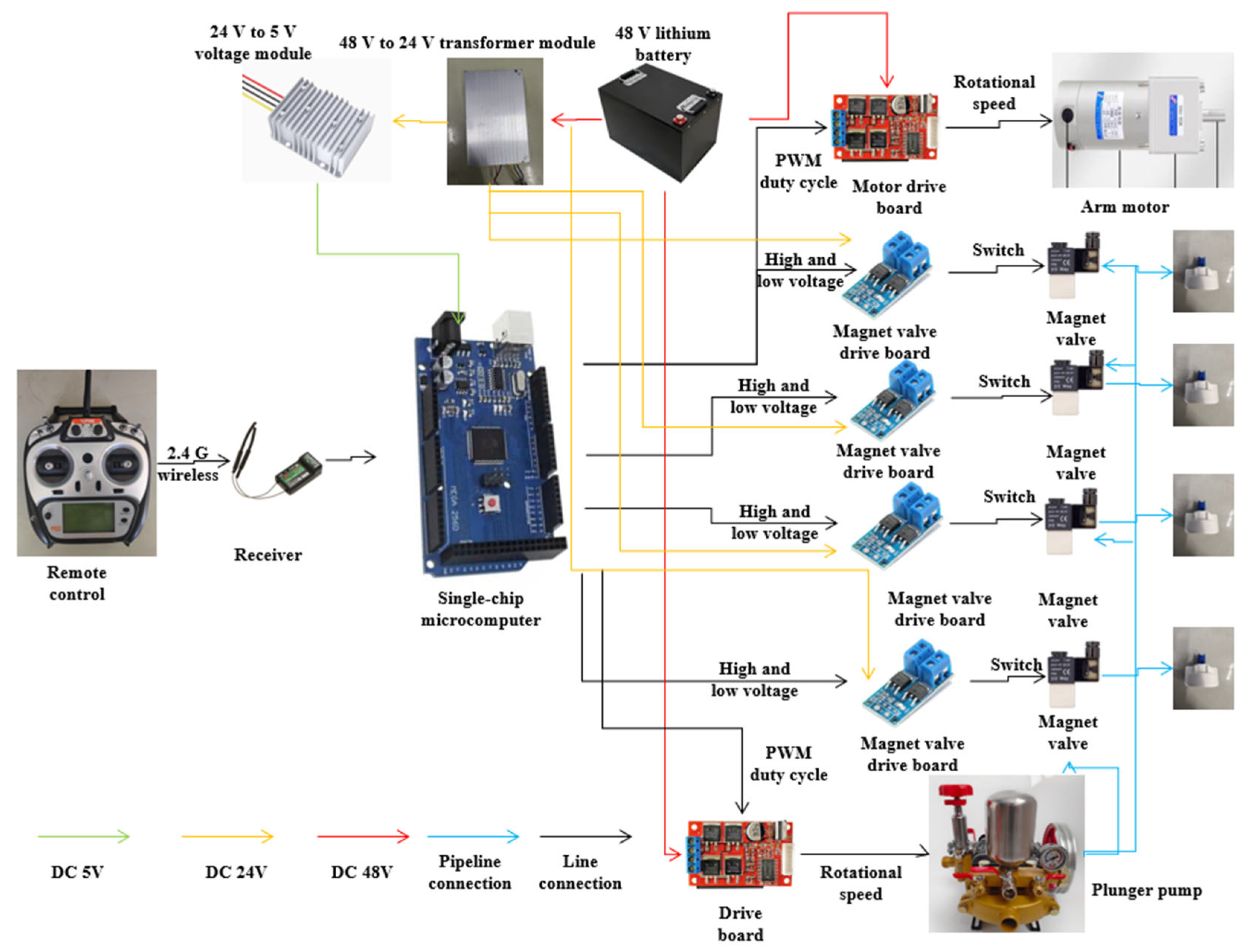
2.2.2. Hardware Design
2.2.3. Software Design
2.3. Parameter Optimization of Swing-Arm Mechanism
2.3.1. Apparatus and Design
2.3.2. Process and Evaluation
2.4. Performance Test of Orchard Swing-Arm Sprayer
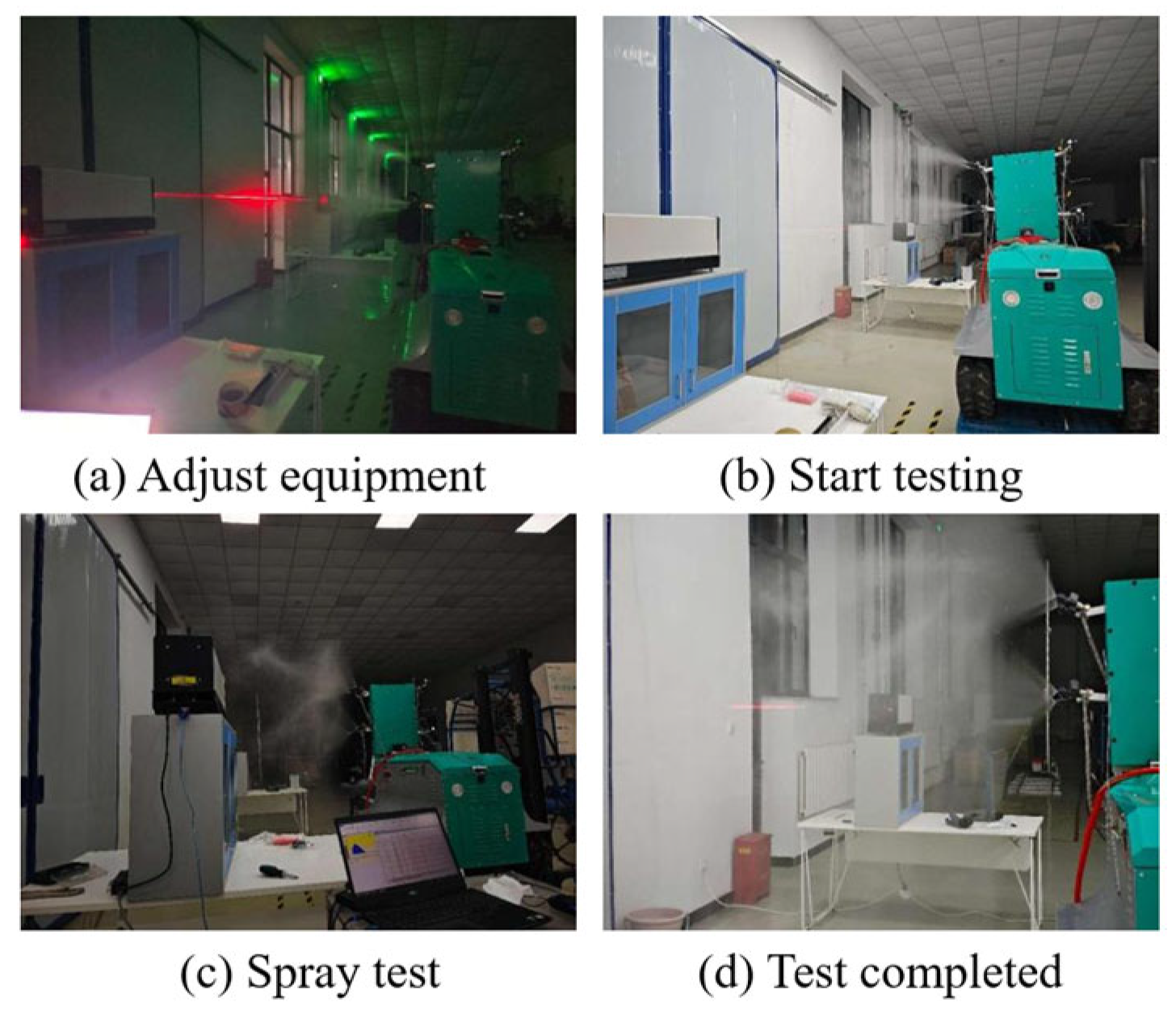
2.4.1. Spray Particle Size Test
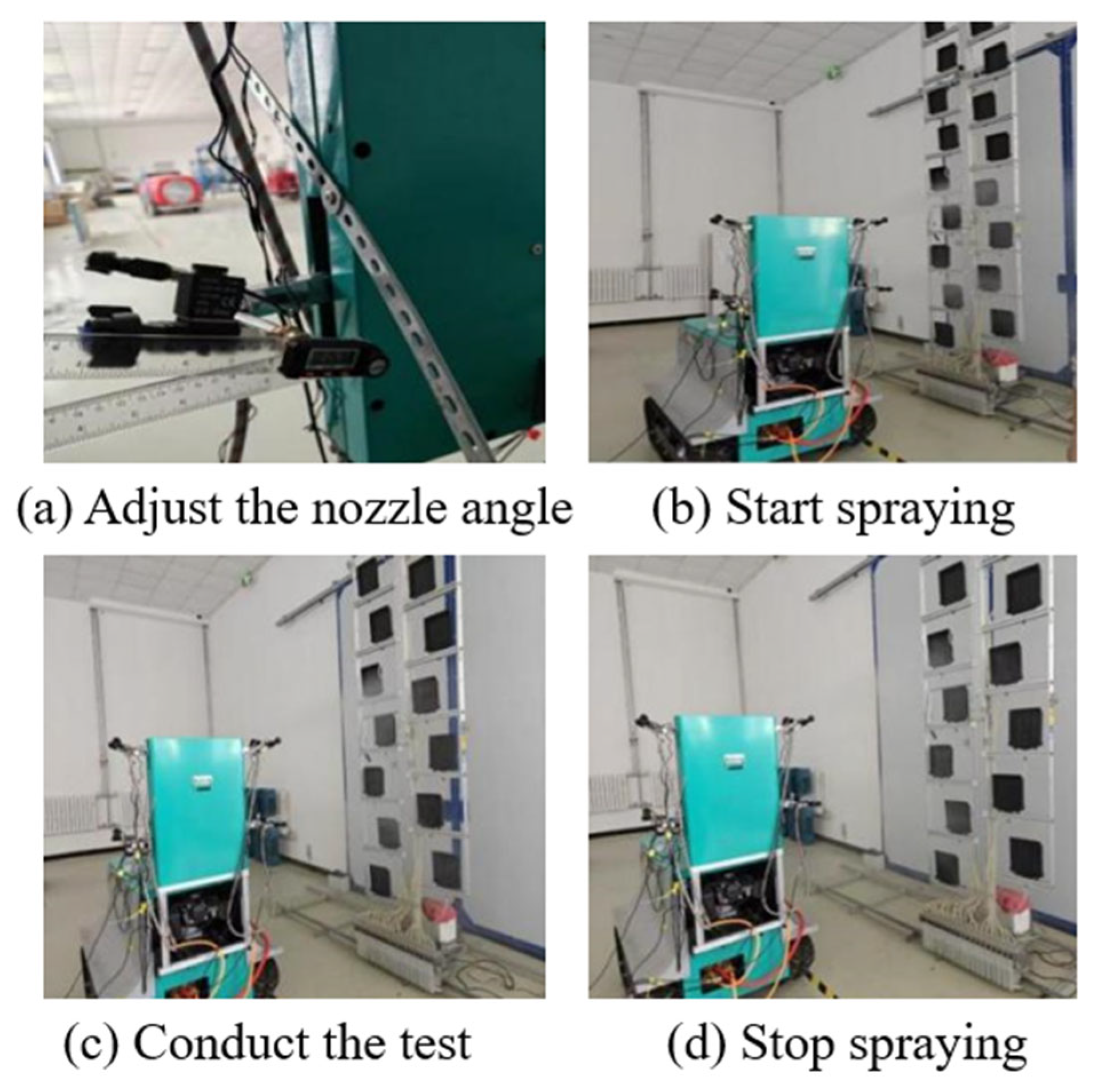
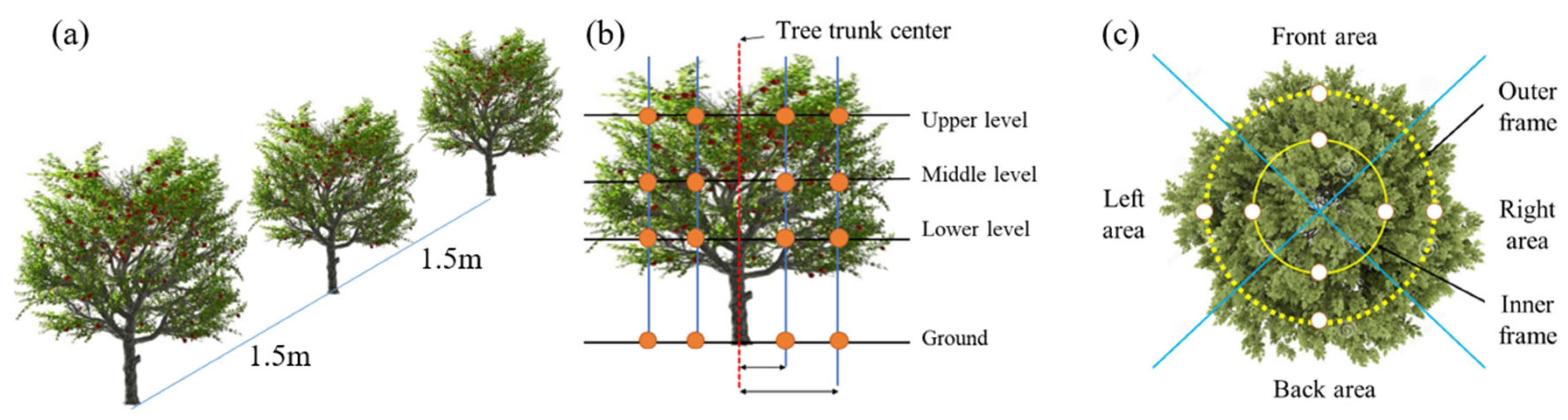
2.4.2. Field Trial
3. Results and Discussion
3.1. Optimization of Spray Parameters of Swing-Arm Mechanism
3.1.1. Determination of Swing-Arm Angle
3.1.2. Determination of Motor Speed
3.2. Results of Swing-Arm Sprayer Performance
3.2.1. Spray Particle Size
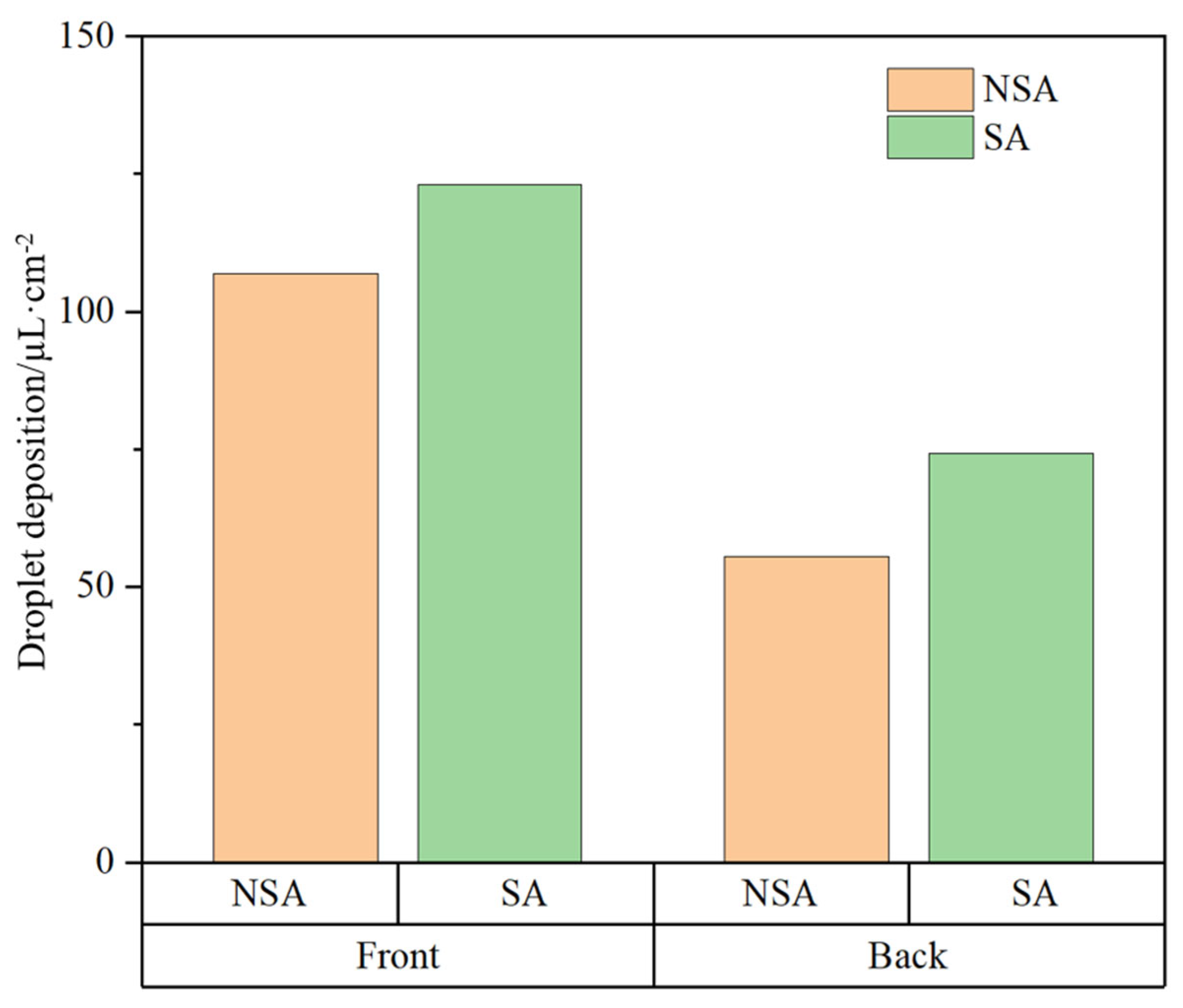
3.2.2. Coverage and Deposit
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, S.; Li, J.; Yu, S.; Wang, P.; Liu, H.; Yang, X. Anti-Drift Technology Progress of Plant Protection Applied to Orchards: A Review. Agronomy 2023, 13, 2679. [Google Scholar] [CrossRef]
- Patil, Y.M.; Patil, S.B.; Powar, R.V. A Comparative Analysis of Plant Canopy Detection Performance in a Variable-Rate Spraying System Using Deep Learning. J. Inst. Eng. (India) Ser. A 2024, 105, 487–497. [Google Scholar] [CrossRef]
- Saikumar, A.; Sahal, A.; Mansuri, S.M.; Hussain, A.; Junaid, P.M.; Nickhil, C.; Badwaik, L.S.; Kumar, S. Assessment of physicochemical attributes and variation in mass-volume of Himalayan pears: Computer vision-based modeling. J. Food Compos. Anal. 2025, 137, 106955. [Google Scholar] [CrossRef]
- Jiang, H.; Niu, C.; Liu, L.; Wang, D.; Wang, J.; Mao, W. Design and Experiment of Air Volume Control System of Orchard Multi-pipe Air Sprayer. Trans. Chin. Soc. Agric. Mach. 2020, 51, 298–307. [Google Scholar]
- Qiu, W.; Zhang, K.; Lyu, Q.; Huang, X.; Deng, Y.; Zhou, L.; Shi, Y. Design and test of goose-neck long-range air-assisted sprayer for nursery. Trans. Chin. Soc. Agric. Eng. 2024, 40, 46–53. [Google Scholar]
- Ru, Y.; Chen, X.; Liu, B.; Wang, S.; Lin, M. Optimized Design and Performance Test of Axial Flow Orchard Sprayer Air Delivery System. Trans. Chin. Soc. Agric. Mach. 2022, 53, 147–157. [Google Scholar]
- Hanif, A.S.; Han, X.; Yu, S.H. Independent Control Spraying System for UAV-Based Precise Variable Sprayer: A Review. Drones 2022, 6, 383. [Google Scholar] [CrossRef]
- Grella, M.; Gioelli, F.; Marucco, P.; Zwertvaegher, I.; Mozzanini, E.; Mylonas, N.; Nuyttens, D.; Balsari, P. Field assessment of a pulse width modulation (PWM) spray system applying different spray volumes: Duty cycle and forward speed effects on vines spray coverage. Precis. Agric. 2022, 23, 219–252. [Google Scholar] [CrossRef]
- Nasir, F.E.; Tufail, M.; Haris, M.; Iqbal, J.; Khan, S.; Khan, M.T. Precision agricultural robotic sprayer with real-time Tobacco recognition and spraying system based on deep learning. PLoS ONE 2023, 18, e0283801. [Google Scholar] [CrossRef]
- Kang, C.; He, L.; Zhu, H. Assessment of spray patterns and efficiency of an unmanned sprayer used in planar growing systems. Precis. Agric. 2024, 25, 2271–2291. [Google Scholar] [CrossRef]
- Wang, S.; Wang, W.; Lei, X.; Wang, S.; Li, X.; Norton, T. Canopy Segmentation Method for Determining the Spray Deposition Rate in Orchards. Agronomy 2022, 12, 1195. [Google Scholar] [CrossRef]
- Zhu, Y.; Guo, Q.; Tang, Y.; Zhu, X.; He, Y.; Huang, H.; Luo, S. CFD simulation and measurement of the downwash airflow of a quadrotor plant protection UAV during operation. Comput. Electron. Agric. 2022, 201, 107286. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, Q.; Zhou, H.; Zhang, C.; Jiang, X.; Lv, X. CFD analysis and RSM-based design optimization of axial air-assisted sprayer deflectors for orchards. Crop. Prot. 2024, 184, 106794. [Google Scholar] [CrossRef]
- Sharda, A.; Karkee, M.; Hoheisel, G.; Zhang, Q.; Mangus, D. Design and Evaluation of Solid Set Canopy Delivery System for Spray Application in High-density Apple Orchards. Appl. Eng. Agric. 2019, 35, 751–757. [Google Scholar] [CrossRef]
- Wang, S.; Song, J.; Qi, P.; Yuan, C.; Wu, H.; Zhang, L.; Liu, W.; Liu, Y.; He, X. Design and development of orchard autonomous navigation spray system. Front. Plant Sci. 2022, 13, 960686. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, H.; Fu, M.; Fu, W.; Wang, J.; Zhang, B.; Fu, Y.; Zeng, T. Design and experimental evaluation of a variable pesticide application control system for the air—assisted rubber tree powder sprayer. Pest. Manag. Sci. 2024, 80, 5186–5199. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef]
- Ou, M.; Zhang, J.; Du, W.; Wu, M.; Gao, T.; Jia, W.; Dong, X.; Zhang, T.; Ding, S. Design and experimental research of air-assisted nozzle for pesticide application in orchard. Front. Plant Sci. 2024, 15, 1405530. [Google Scholar] [CrossRef]
- Yue, B.; Zhang, Z.; Zhang, W.; Luo, X.; Zhang, G.; Huang, H.; Wu, X.; Bao, K.; Peng, M. Design of an Automatic Navigation and Operation System for a Crawler-Based Orchard Sprayer Using GNSS Positioning. Agronomy 2024, 14, 271. [Google Scholar] [CrossRef]
- Asaei, H.; Jafari, A.; Loghavi, M. Development and evaluation of a targeted orchard sprayer using machine vision technology. J. Agric. Mach. 2016, 6, 362–375. [Google Scholar]
- Salas, B.; Salcedo, R.; Garcia-Ruiz, F. Design, implementation and validation of a sensor-based precise airblast sprayer to improve pesticide applications in orchards. Precis. Agric. 2023, 25, 865–888. [Google Scholar] [CrossRef]
- Liu, H.; Du, Z.; Shen, Y.; Du, W.; Zhang, X. Development and evaluation of an intelligent multivariable spraying robot for orchards and nurseries. Comput. Electron. Agric. 2024, 222, 109056. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, H.; Zhang, Z.; Salcedo, R.; Duan, D. Droplet Size Spectrum, Activation Pressure, and Flow Rate Discharged from PWM Flat-Fan Nozzles. Trans. ASABE 2021, 64, 313–325. [Google Scholar] [CrossRef]
- Shen, Y.; Zhu, H.; Liu, H.; Chen, Y.; Ozkan, E. Development of a Laser-Guided, Embedded-Computer-Controlled, Air-Assisted Precision Sprayer. Trans. ASABE 2017, 60, 1827–1838. [Google Scholar] [CrossRef]
- Siefen, N.; McCormick, R.J.; Vogel, A.M.; Biegert, K. Effects of laser scanner quality and tractor speed to characterise apple tree canopies. Smart Agric. Technol. 2023, 4, 100173. [Google Scholar] [CrossRef]
- Dai, S.; Ou, M.; Du, W.; Yang, X.; Dong, X.; Jiang, L.; Zhang, T.; Ding, S.; Jia, W. Effects of sprayer speed, spray distance, and nozzle arrangement angle on low-flow air-assisted spray deposition. Front. Plant Sci. 2023, 14, 1184244. [Google Scholar] [CrossRef] [PubMed]
- Yan, C.; Xu, L.; Ma, S.; Tan, H.; Shen, C.; Ma, J.; Zhou, H. Enhancing spray deposition in grape canopies through the development of new prototype air-disturbance sprayers. Biosyst. Eng. 2024, 244, 1–15. [Google Scholar] [CrossRef]
- Salcedo, R.; Zhu, H.; Zhang, Z.; Wei, Z.; Chen, L.; Ozkan, E.; Falchieri, D. Foliar deposition and coverage on young apple trees with PWM-controlled spray systems. Electron. Agric. 2020, 178, 105794. [Google Scholar] [CrossRef]
- Jiang, S.; Li, W.; Yang, S.; Zheng, Y.; Tan, Y.; Xu, J. Factors Affecting Droplet Loss behind Canopies with Air-Assisted Sprayers Used for Fruit Trees. Agronomy 2023, 13, 375. [Google Scholar] [CrossRef]
- Li, T.; Qi, P.; Wang, Z.; Xu, S.; Huang, Z.; Han, L.; He, X. Evaluation of the Effects of Airflow Distribution Patterns on Deposit Coverage and Spray Penetration in Multi-Unit Air-Assisted Sprayer. Agronomy 2022, 12, 944. [Google Scholar] [CrossRef]
- Michael, C.; Gil, E.; Gallart, M.; Stavrinides, M.C. Influence of Spray Technology and Application Rate on Leaf Deposit and Ground Losses in Mountain Viticulture. Agriculture 2020, 10, 615. [Google Scholar] [CrossRef]
- Wei, Z.; Xue, X.; Salcedo, R.; Zhang, Z.; Gil, E.; Sun, Y.; LI, Q.; Shen, J.; He, Q.; Dou, Q.; et al. Key Technologies for an Orchard Variable-Rate Sprayer: Current Status and Future Prospects. Agronomy 2022, 13, 59. [Google Scholar] [CrossRef]
- Sun, D.; Liu, W.; Li, Z.; Zhan, X.; Dai, Q.; Xue, X.; Song, S. Numerical Experiment and Optimized Design of Pipeline Spraying On-Line Pesticide Mixing Apparatus Based on CFD Orthogonal Experiment. Agronomy 2022, 12, 1059. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters | Value/Type | Unit |
|---|---|---|
| Dimensions (length × width × height) | 1400 × 860 × 1700 | mm |
| Quality | 346 | kg |
| Driving speed | 5–120 | m/min |
| Volume of agrochemical tank | 150 | L |
| Working pressure | 1–4 | MPa |
| Drive mode | Oil–electric hybrid | / |
| Drive motor power | 1.5 | kW |
| Motor pump power | 1.3 | kW |
| Power of the swing-arm drive motor | 400 | W |
| Power of gasoline generator | 10 | kW |
| Position | Angle 1 | Angle 2 | Angle 3 | Angle 4 | Angle 5 |
|---|---|---|---|---|---|
| Upper layer | 15° | 30° | 30° | 45° | 60° |
| Lower layer | 0° | 0° | 15° | 15° | 15° |
| Parameters | Angle 1 | Angle 2 | Angle 3 | Angle 4 | Angle 5 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| N | Y | N | Y | N | Y | N | Y | N | Y | ||
| 1 m | VCR (m) | 1.9 | 1.9 | 2.1 | 2.3 | 2.1 | 2.3 | 2.3 | 2.5 | 2.5 | 2.5 |
| CV (%) | 67% | 51% | 56% | 50% | 88% | 65% | 97% | 66% | 87% | 59% | |
| 1.5 m | VCR (m) | / | / | / | / | 2.1 | 2.1 | 2.7 | 2.7 | 2.9 | 1.9 |
| CV (%) | / | / | / | / | 76% | 55% | 67% | 65% | 81% | 42% | |
| Parameters | Speed 1 | Speed 2 | Speed 3 | Speed 4 | Speed 5 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| N | Y | N | Y | N | Y | N | Y | N | Y | ||
| 1 m | Value (m) | 2.3 | 2.3 | 2.3 | 2.5 | 2.5 | 2.3 | 2.3 | 2.3 | 2.5 | 2.5 |
| CV (%) | / | / | / | / | 72% | 72% | 69% | 67% | 62% | 72% | |
| Parameters | No Swing-Arm | Swing-Arm | Unit |
|---|---|---|---|
| D10 | 73.44 | 80.93 | μm |
| D50 | 156.09 | 174.96 | μm |
| D90 | 258.06 | 274.54 | μm |
| Span | 1.20 | 1.11 | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Geng, M.; Zhao, K.; Meng, X.; Zhang, H.; He, X. Design and Experimental Operation of a Swing-Arm Orchard Sprayer. Agronomy 2025, 15, 1706. https://doi.org/10.3390/agronomy15071706
Yu Z, Geng M, Zhao K, Meng X, Zhang H, He X. Design and Experimental Operation of a Swing-Arm Orchard Sprayer. Agronomy. 2025; 15(7):1706. https://doi.org/10.3390/agronomy15071706
Chicago/Turabian StyleYu, Zhongyi, Mingtian Geng, Keyao Zhao, Xiangsen Meng, Hongtu Zhang, and Xiongkui He. 2025. "Design and Experimental Operation of a Swing-Arm Orchard Sprayer" Agronomy 15, no. 7: 1706. https://doi.org/10.3390/agronomy15071706
APA StyleYu, Z., Geng, M., Zhao, K., Meng, X., Zhang, H., & He, X. (2025). Design and Experimental Operation of a Swing-Arm Orchard Sprayer. Agronomy, 15(7), 1706. https://doi.org/10.3390/agronomy15071706