
Drift Suppression by Adjusting Flight Parameters for Manned Helicopters in Forested Regions

 ,
,
Abstract
1. Introduction
2. Materials and Methods
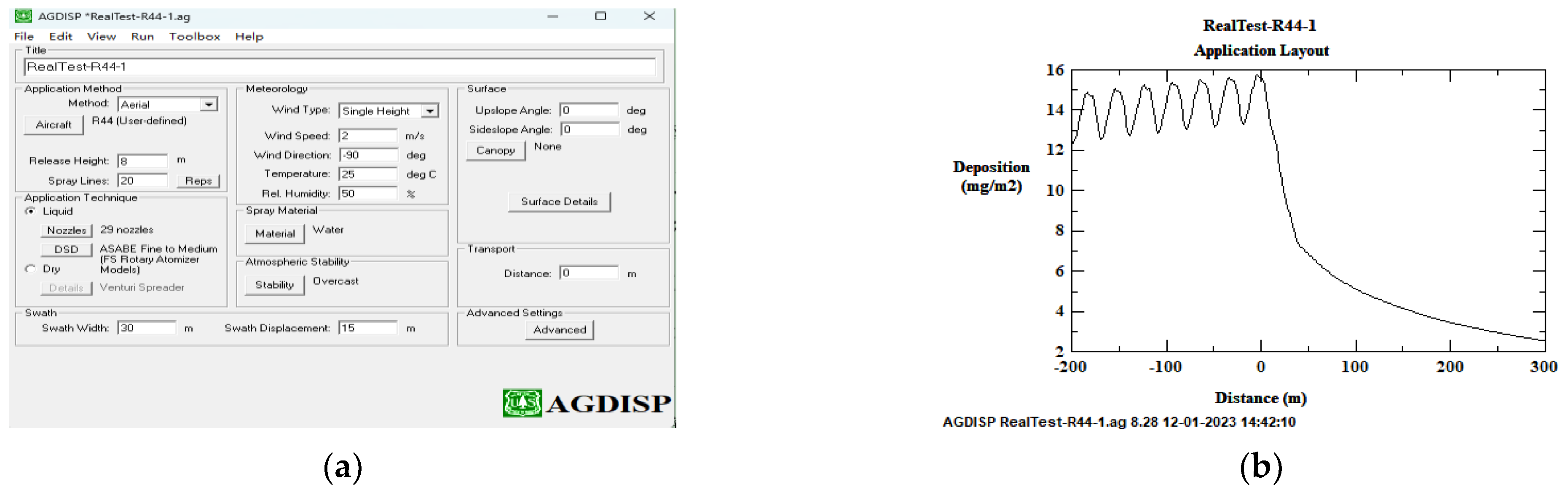
2.1. Acquisition of Droplet Deposition Data by AGDISP
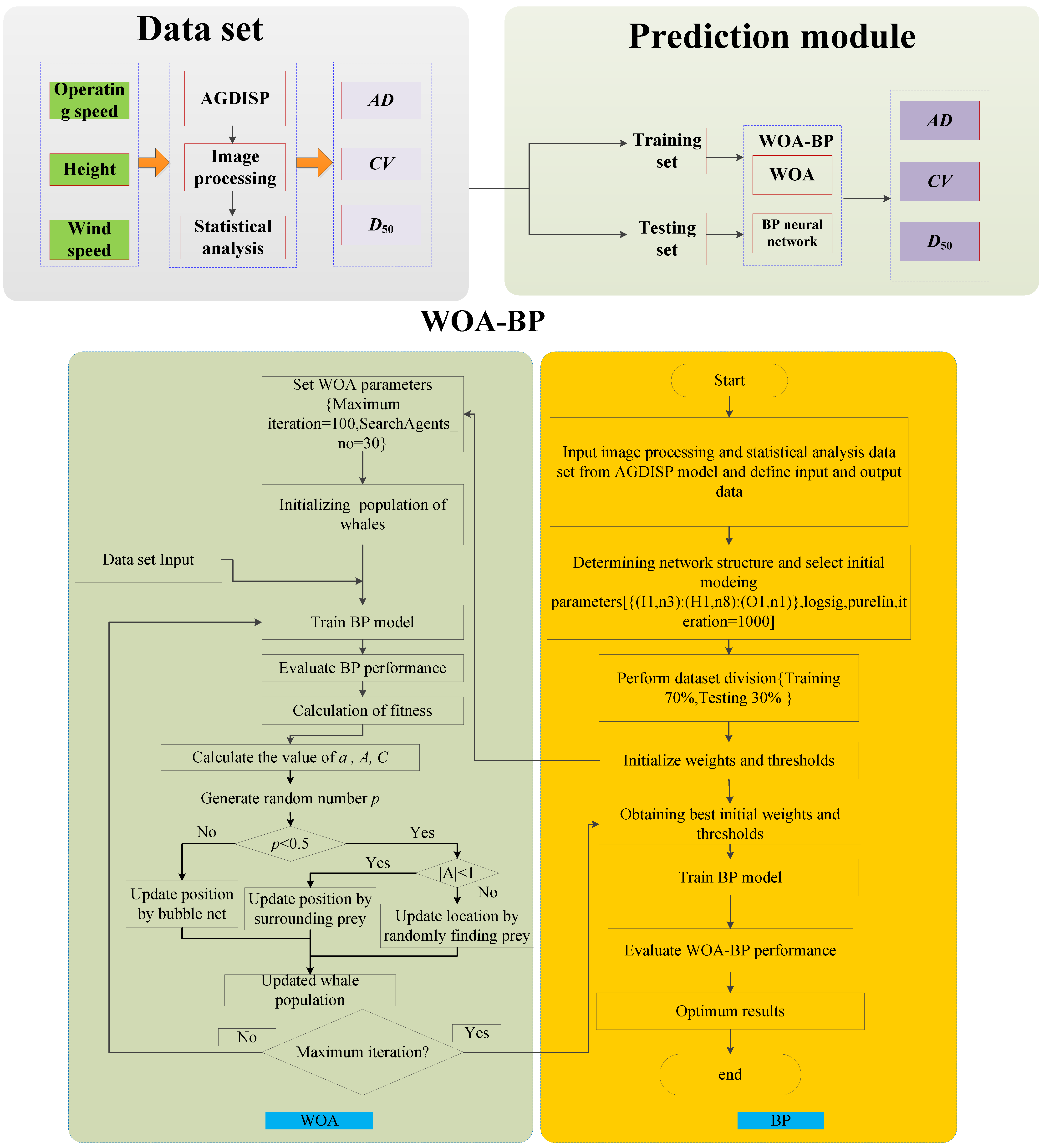
2.2. Droplet Deposition Data Modeling Based on WOA-BP
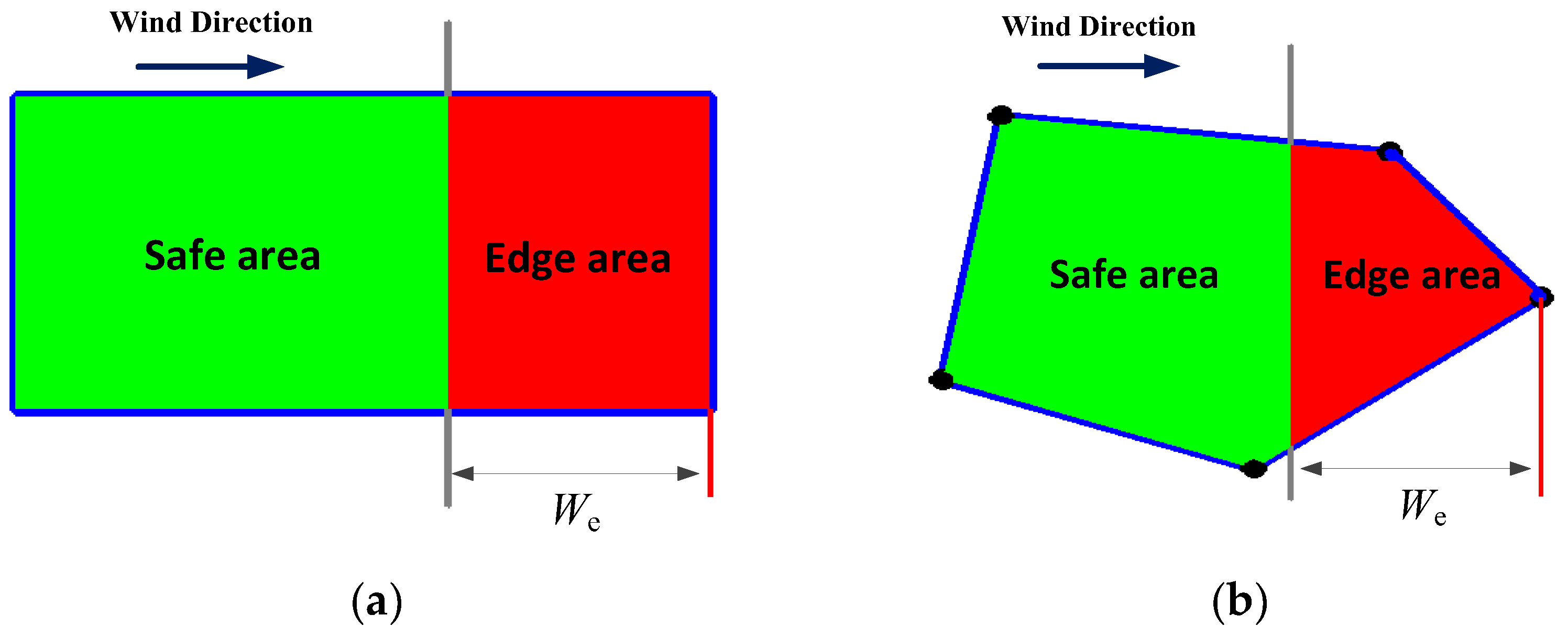
2.3. Developing a New Application Strategy
2.4. Droplet Deposition Experiment
3. Results
3.1. Effects of Image Processing
3.2. WOA-BP Prediction Accuracy
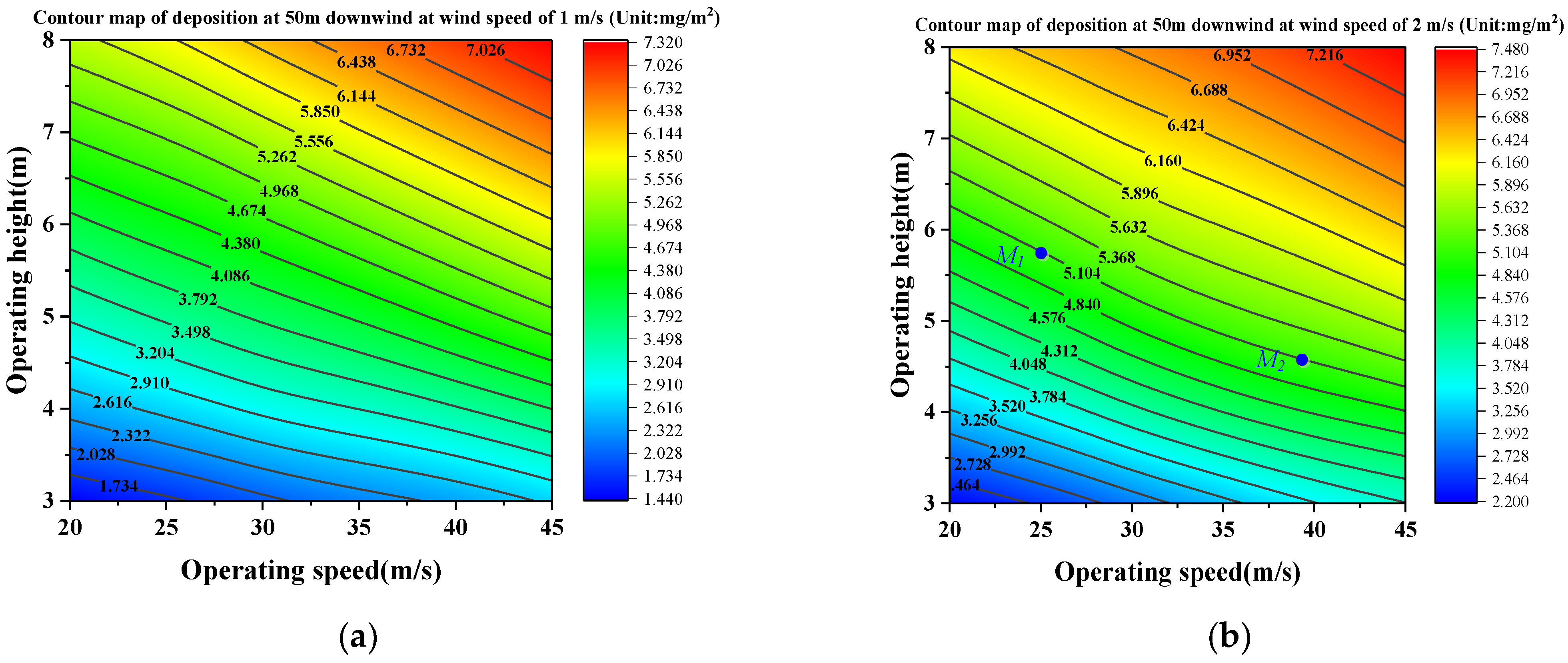
3.3. The Deposition Law of Droplets
3.4. Matching Chart of Flight Height and Speed
3.5. The Deposition Results of a Real Flight
4. Discussion
4.1. Comparison of AGDISP Model Predictions and Experimental Results
4.2. Comparative Analysis of Machine Learning Prediction Models
4.3. Superiority over Existing Application Route Planning Methods
4.4. Limitations and Research Outlook
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, C.; Park, T.; Wang, X.; Piao, S.; Xu, B.; Chaturvedi, R.K.; Fuchs, R.; Brovkin, V.; Ciais, P.; Fensholt, R.; et al. China and India lead in greening of the world through land-use management. Nat. Sustain. 2019, 2, 122–129. [Google Scholar] [CrossRef] [PubMed]
- Fang, S.; Ru, Y.; Liu, Y.; Hu, C.; Chen, X.; Liu, B. Route Planning of Helicopters Spraying Operations in Multiple Forest Areas. Forests 2021, 12, 1658. [Google Scholar] [CrossRef]
- Zhan, Y.; Chen, P.; Xu, W.; Chen, S.; Han, Y.; Lan, Y.; Wang, G. Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution. Biosyst. Eng. 2022, 216, 32–45. [Google Scholar] [CrossRef]
- Zhang, A.; Xu, L.; Jin, J.; Wu, Y.; Wang, Y. Analysis of pulse combustion processes and thermodynamic cycles in pulse combustors. Exp. Therm. Fluid Sci. 2024, 151, 111104. [Google Scholar] [CrossRef]
- Dubuis, P.; Droz, M.; Melgar, A.; Zürcher, U.A.; Zarn, J.A.; Gindro, K.; König, S.L.B. Environmental, bystander and resident exposure from orchard applications using an agricultural unmanned aerial spraying system. Sci. Total Environ. 2023, 881, 163371. [Google Scholar] [CrossRef] [PubMed]
- Hilz, E.; Vermeer, A.W.P. Spray drift review: The extent to which a formulation can contribute to spray drift reduction. Crop Prot. 2013, 44, 75–83. [Google Scholar] [CrossRef]
- Teske, M.E.; Thistle, H.W.; Schou, W.C.; Miller, P.C.H.; Strager, J.M.; Richardson, B.; Ellis, M.C.B.; Barry, J.W.; Twardus, D.B.; Thompson, D.G. A Review of Computer Models for Pesticide Deposition Prediction. Trans. ASABE 2011, 54, 789–801. [Google Scholar] [CrossRef]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W.; et al. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 146181. [Google Scholar] [CrossRef]
- Yao, W.; Guo, S.; Wang, J.; Chen, C.; Yu, F.; Li, X.; Xu, T.; Lan, Y. Droplet deposition and pest control efficacy on pine trees from aerial application. Pest Manag. Sci. 2022, 78, 3324–3336. [Google Scholar] [CrossRef]
- Hewitt, A.J. Spray optimization through application and liquid physical property variables—I. Environmentalist 2008, 28, 25–30. [Google Scholar] [CrossRef]
- Valcore, D.L. Spray optimization through application and liquid physical property variables—II. Environmentalist 2008, 28, 31–33. [Google Scholar] [CrossRef]
- Lan, Y.; Shan, C.; Wang, Q.; Liu, Q.; Yang, C.; Xie, Y.; Wang, G. Effects of different spray additives on droplet deposition characteristics during plant protection UAV spraying operations. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2021, 37, 31–38. [Google Scholar] [CrossRef]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Nanavati, R.V.; Meng, Y.; Coombes, M.; Liu, C. Generalized data-driven optimal path planning framework for uniform coverage missions using crop spraying UAVs. Precis. Agric. 2023, 24, 1497–1525. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, Z.; Xue, X.; Gu, W.; Peng, B. A hybrid algorithm based on MOSFLA and GA for multi-UAVs plant protection task assignment and sequencing optimization. Appl. Soft Comput. 2020, 96, 106623. [Google Scholar] [CrossRef]
- Fang, S.; Ru, Y.; Hu, C.; Yang, F.; Xue, J.; Zhou, J. Planning the temporary takeoff/landing site’s location for a pesticide spraying helicopter based on an intelligent fusion algorithm. Comput. Electron. Agric. 2023, 209, 107826. [Google Scholar] [CrossRef]
- Lakshmanan, A.K.; Mohan, R.E.; Ramalingam, B.; Le, A.V.; Veerajagadeshwar, P.; Tiwari, K.; Ilyas, M. Complete coverage path planning using reinforcement learning for Tetromino based cleaning and maintenance robot. Autom. Constr. 2020, 112, 103078. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T. Navigating route planning for multiple vehicles in multifield agriculture with a fast hybrid algorithm. Comput. Electron. Agric. 2023, 212, 108021. [Google Scholar] [CrossRef]
- Ansari Ardeh, M.; Mei, Y.; Zhang, M. Genetic Programming With Knowledge Transfer and Guided Search for Uncertain Capacitated Arc Routing Problem. IEEE Trans. Evol. Comput. 2022, 26, 765–779. [Google Scholar] [CrossRef]
- Kyriakakis, N.A.; Marinaki, M.; Marinakis, Y. A hybrid ant colony optimization-variable neighborhood descent approach for the cumulative capacitated vehicle routing problem. Comput. Oper. Res. 2021, 134, 105397. [Google Scholar] [CrossRef]
- Bilanin, A.J.; Teske, M.E.; Barry, J.W.; Ekblad, R.B. Agdisp: The aircraft spray dispersion model, code development and experimental validation. Trans. ASAE 1989, 32, 0327–0334. [Google Scholar] [CrossRef]
- Teske, M.E.; Thistle, H.W.; Fritz, B.K. Modeling Aerially Applied Sprays: An Update to AGDISP Model Development. Trans. ASABE 2019, 62, 343–354. [Google Scholar] [CrossRef]
- Robinson, R.C.; Parsons, R.G.; Barbe, G.; Patel, P.T.; Murphy, S. Drift control and buffer zones for helicopter spraying of bracken (Pteridium aquilinum). Agric. Ecosyst. Environ. 2000, 79, 215–231. [Google Scholar] [CrossRef]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Craig, I.P. The GDS model—A rapid computational technique for the calculation of aircraft spray drift buffer distances. Comput. Electron. Agric. 2004, 43, 235–250. [Google Scholar] [CrossRef]
- Hoffmann, W.C.; Kirk, I.W. Spray Deposition and Drift from Two “Medium” Nozzles. Trans. ASAE 2005, 48, 5–11. [Google Scholar] [CrossRef]
- Ru, Y.; Fang, S.; Xue, J.; Hu, C.; Zhou, J. Experimental study of the influence factors of the droplet size of rotary nozzles during manned helicopter spraying operations. Crop Prot. 2024, 177, 9. [Google Scholar] [CrossRef]
- Yao, W.; Lan, Y.; Wang, J.; Wen, S.; Wang, G.; Chen, S. Droplet drift characteristics of aerial spraying of AS350B3e helicopter. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2017, 33, 75–83. [Google Scholar] [CrossRef]
- Lv, Z.; Niu, D.; Li, S.; Sun, H. Multi-surrogate assisted PSO with adaptive speciation for expensive multimodal multi-objective optimization. Appl. Soft Comput. 2023, 147, 110724. [Google Scholar] [CrossRef]
- Tang, X.; Liu, H.; Feng, D.; Zhang, W.; Chang, J.; Li, L.; Yang, L. Prediction of field winter wheat yield using fewer parameters at middle growth stage by linear regression and the BP neural network method. Eur. J. Agron. 2022, 141, 126621. [Google Scholar] [CrossRef]
- Zhang, Y.; Cui, N.; Feng, Y.; Gong, D.; Hu, X. Comparison of BP, WOA-BP and statistical models for predicting daily global solar radiation in arid Northwest China. Comput. Electron. Agric. 2019, 164, 104905. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Shuping, F.; Yu, R.; Chenming, H.; Fengbo, Y. Planning of takeoff/landing site location, dispatch route, and spraying route for a pesticide application helicopter. Eur. J. Agron. 2023, 146, 126814. [Google Scholar] [CrossRef]
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Zhou, H.; Huang, S.; Zhang, P.; Ma, B.; Ma, P.; Feng, X. Prediction of jacking force using WOA-BPNN and PSO-SVR algorithm in curved pipe roof. Tunn. Undergr. Space Technol. 2023, 138, 105159. [Google Scholar] [CrossRef]
- Calou, V.B.C.; Teixeira, A.D.S.; Moreira, L.C.J.; Lima, C.S.; de Oliveira, J.B.; de Oliveira, M.R.R. The use of UAVs in monitoring yellow sigatoka in banana. Biosyst. Eng. 2020, 193, 115–125. [Google Scholar] [CrossRef]
- Dong, R.; Miao, Y.; Berry, P.; Wang, X.; Yuan, F.; Kusnierek, K.; Baker, C.; Sterling, M. In-season prediction of maize stem lodging risk using an active canopy sensor. Eur. J. Agron. 2023, 151, 126956. [Google Scholar] [CrossRef]
- Gao, R.; Tao, J.; Zhang, J.; Ma, L.; Xu, M. NSGA-III-SD based Fuzzy energy management system optimization for lithium battery/supercapacitor HEV. Appl. Soft Comput. 2023, 142, 110280. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems With Box Constraints. IEEE Trans. Evol. Comput. 2014, 18, 577–601. [Google Scholar] [CrossRef]
- Kok, Z.H.; Mohamed Shariff, A.R.; Alfatni, M.S.M.; Khairunniza-Bejo, S. Support Vector Machine in Precision Agriculture: A review. Comput. Electron. Agric. 2021, 191, 106546. [Google Scholar] [CrossRef]
- Okoji, A.I.; Okoji, C.N.; Awarun, O.S. Performance evaluation of artificial intelligence with particle swarm optimization (PSO) to predict treatment water plant DBPs (haloacetic acids). Chemosphere 2023, 344, 140238. [Google Scholar] [CrossRef] [PubMed]
- Speiser, J.L.; Miller, M.E.; Tooze, J.; Ip, E. A comparison of random forest variable selection methods for classification prediction modeling. Expert Syst. Appl. 2019, 134, 93–101. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Zhang, N.; Wu, L.; Wang, Y. Wind speed forecasting based on the hybrid ensemble empirical mode decomposition and GA-BP neural network method. Renew. Energy 2016, 94, 629–636. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, G.; Yao, G.; Shen, Q.; Yu, X.; He, S. Combining GA-SVM and NSGA-III multi-objective optimization to reduce the emission and fuel consumption of high-pressure common-rail diesel engine. Energy 2023, 278, 127965. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Level |
|---|---|
| (m/s) | 20, 25, 30, 35, 40, 45 |
| (m) | 3, 4, 5, 6, 7, 8 |
| Wind speed Ws (m/s) | 0.5, 1, 1.5, 2, 2.5, 3 |
| Flight Number | Date | Method | Wind Speed (m/s) | Wind Direction | Safe Area | Edge Area | ||
|---|---|---|---|---|---|---|---|---|
| Flight Height (m) | Flight Speed (km/h) | Flight Height (m) | Flight Speed (km/h) | |||||
| 1 | 21 October 2023 | Artificial empirical method | 2 | South | 9.2 (9.5) | 100 (102) | 9.2 (9.3) | 100 (102.1) |
| 2 | 21 October 2023 | New strategy | 2 | South | 7.6 (7.8) | 126 (127.5) | 6.7 (6.9) | 99 (99.5) |
| 3 | 28 October 2023 | Artificial empirical method | 1 | Northeast wind | 9.2 (9.6) | 100 (101.3) | 9.2 (9.5) | 100 (101.2) |
| 4 | 28 October 2023 | New strategy | 1 | Northeast wind | 8.4 (8.5) | 135 (136.1) | 7.8 (7.9) | 108 (109.5) |
| 5 | 10 November 2023 | Artificial empirical method | 2.5 | Northeast wind | 9.2 (9.4) | 100 (99.9) | 9.2 (9.3) | 100 (101.5) |
| 6 | 10 November 2023 | New strategy | 2.5 | Northeast wind | 7.4 (7.8) | 108 (108.3) | 6.7 (6.8) | 90 (90.5) |
| Flight Number | AD (mg/m2) | CV | D50 (mg/m2) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AGDISP | Experiment | Error | AGDISP | Experiment | Error | AGDISP | Experiment | Error | |
| Flight 1 | 15.98 | 14.65 | 8.31% | 0.05 | 0.06 | 20.66% | 7.53 | 6.64 | 11.76% |
| Flight 3 | 16.95 | 15.49 | 8.59% | 0.18 | 0.20 | 12.82% | 6.64 | 5.97 | 10.17% |
| Flight 5 | 15.88 | 14.62 | 7.91% | 0.07 | 0.09 | 26.13% | 7.56 | 6.55 | 13.31% |
| Machine Learning Algorithms | R2 (AD) | R2 (CV) | R2 (D50) |
|---|---|---|---|
| MLR | 0.9302 | 0.8919 | 0.9030 |
| BP | 0.9971 | 0.9962 | 0.9831 |
| GA-BP | 0.9977 | 0.9988 | 0.9973 |
| WOA-BP | 0.9994 | 0.9997 | 0.9993 |
| ELM | 0.9982 | 0.9956 | 0.9895 |
| RBF | 0.9672 | 0.9302 | 0.6259 |
| SVR | 0.9977 | 0.9963 | 0.9961 |
| RF | 0.8116 | 0.8372 | 0.8907 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, S.; Chen, L.; Ru, Y.; Wang, N.; Jin, X.; Liu, Y.; Sun, L. Drift Suppression by Adjusting Flight Parameters for Manned Helicopters in Forested Regions. Agronomy 2025, 15, 1129. https://doi.org/10.3390/agronomy15051129
Fang S, Chen L, Ru Y, Wang N, Jin X, Liu Y, Sun L. Drift Suppression by Adjusting Flight Parameters for Manned Helicopters in Forested Regions. Agronomy. 2025; 15(5):1129. https://doi.org/10.3390/agronomy15051129
Chicago/Turabian StyleFang, Shuping, Liping Chen, Yu Ru, Ningning Wang, Xiaojun Jin, Yangyang Liu, and Lingyuan Sun. 2025. "Drift Suppression by Adjusting Flight Parameters for Manned Helicopters in Forested Regions" Agronomy 15, no. 5: 1129. https://doi.org/10.3390/agronomy15051129
APA StyleFang, S., Chen, L., Ru, Y., Wang, N., Jin, X., Liu, Y., & Sun, L. (2025). Drift Suppression by Adjusting Flight Parameters for Manned Helicopters in Forested Regions. Agronomy, 15(5), 1129. https://doi.org/10.3390/agronomy15051129