3.1. Simulation Results of Pesticide Tank Sloshing Under Emergency Stop Posture of Plant Protection UAV
When the crop protection drone is in an emergency stop state, it experiences a horizontal acceleration in the opposite direction to the original motion of the pesticide tank. To simulate the drone’s flight attitude during an emergency stop, a horizontal acceleration of 5 m/s
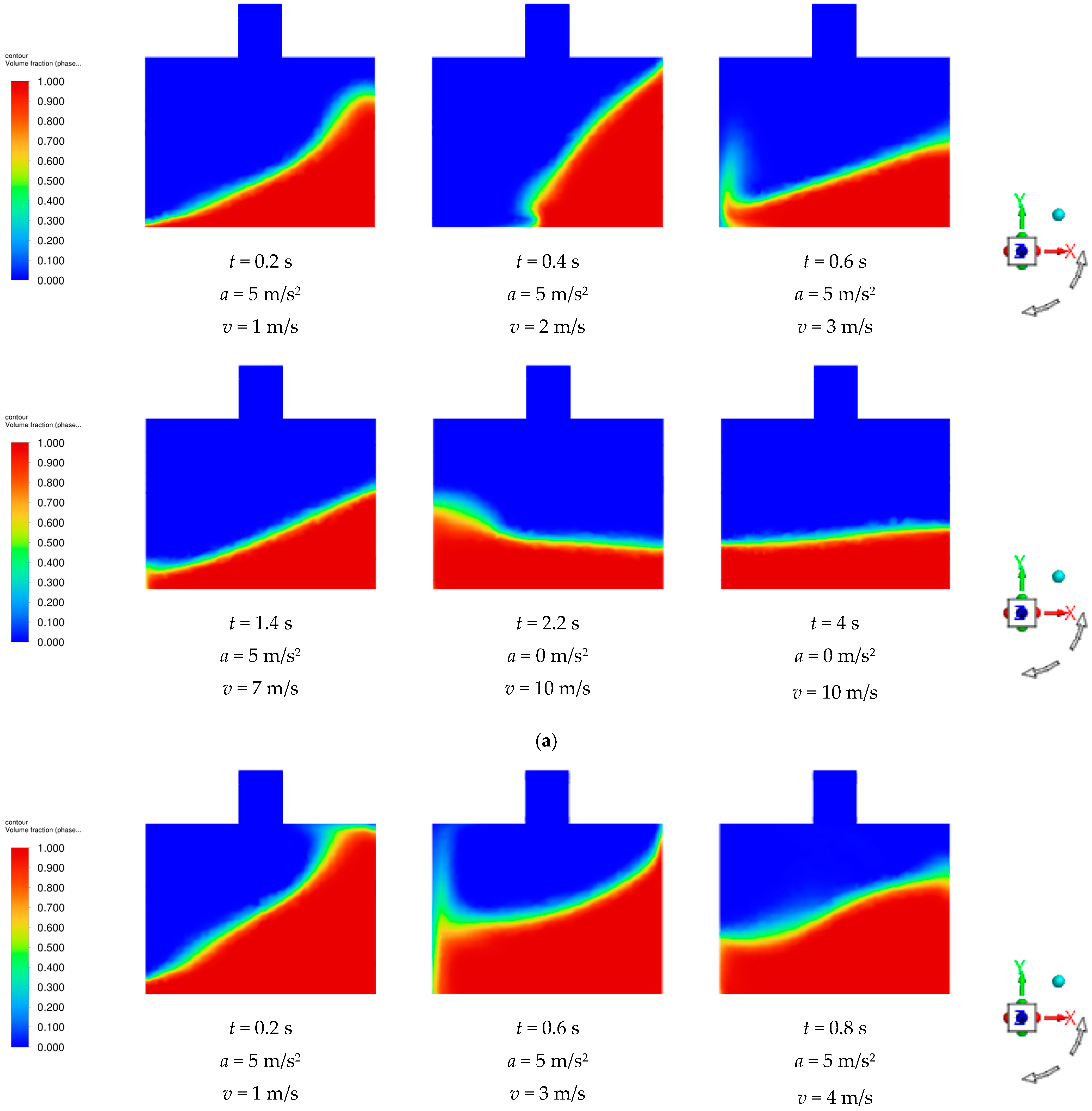
2 was applied for a duration of 2 s to the pesticide tank. A user-defined function (UDF) incorporated this acceleration excitation into the calculation domain. The numerical simulation results, represented in cloud maps for filling ratios of 0.3, 0.5, and 0.7 in the pesticide tank, are shown in
Figure 8. As illustrated, during the application of acceleration, the pesticide tank began to decelerate. The inertial force caused the medicine to move in the opposite direction of the acceleration relative to the pesticide tank, resulting in a tilt of the liquid level. The amplitude of this tilt varied continuously over time. Additionally, the impact of liquid droplets on the walls of the pesticide tank created a disturbance due to liquid droplet splashing. This disturbance drew a significant amount of air into the liquid, forming bubbles. Further agitation caused these bubbles to rise to the liquid surface and eventually rupture [
29]. Once the pesticide tank came to rest, the acceleration ceased immediately. However, because of the inertia of the medicine and the constraints of the inner wall of the pesticide tank, the liquid began to move back and forth in a chaotic manner until the liquid level stabilized.
The cloud maps derived from the numerical simulation results are shown in
Figure 8, depicting the pesticide tank at filling ratios of 0.3, 0.5, and 0.7. A comparison of these results showed that the overall relative motion of the medicine remained nearly the same across the different filling ratios. However, at a filling ratio of 0.7, a noticeable liquid spray was observed in the pesticide tank, leading to more intense liquid splashing and more significant formation and rupture of bubbles. This phenomenon suggested that as the filling ratio increased, the overall fluctuation in the medicine relative to the pesticide tank decreased. Simultaneously, after the termination of acceleration excitation, the pesticide tank with a higher filling ratio demonstrated a smaller range of liquid-level fluctuations and returned to a stable state more quickly.
Monitoring points were set up in this work to quantify the pressure changes on the inner wall of the pesticide tank [
30].
Figure 8 indicated that in the emergency stop state, the right inner wall of the pesticide tank was significantly affected by the surge of the drug solution. Consequently, a monitoring point located at 60% of the liquid level on the right inner wall of the pesticide tank was selected for analyzing and calculating the data.
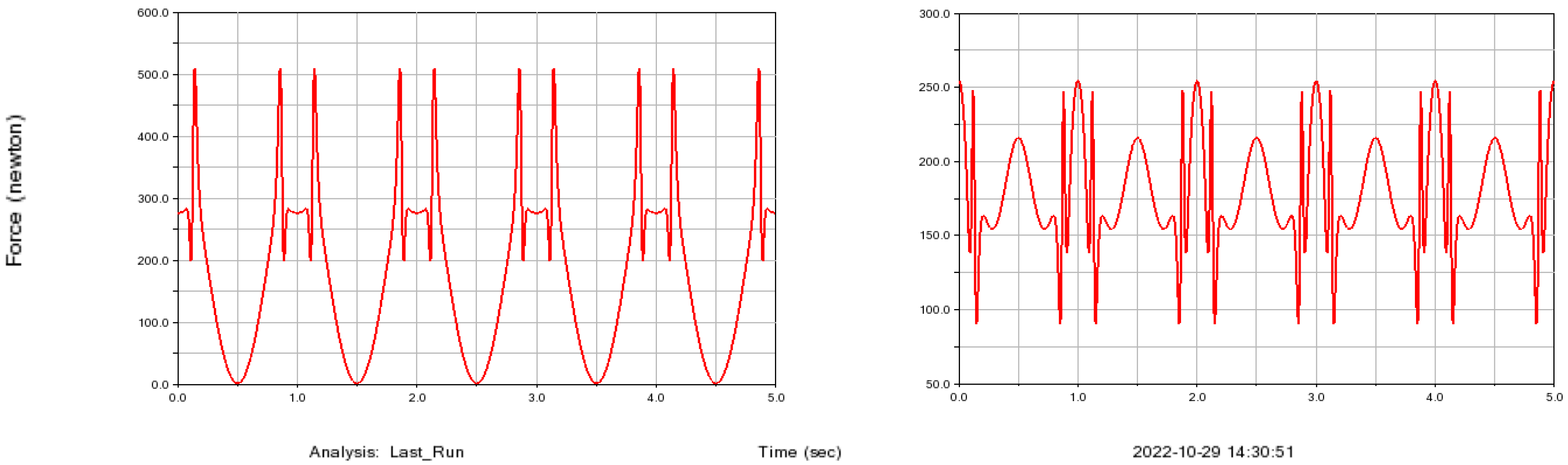
Figure 9 illustrates the pressure variation curve of the pesticide tank under emergency stop conditions for filling ratios of 0.3, 0.5, and 0.7. The pressure at the monitoring point quickly attained a maximum value in a short period before gradually decreasing in a wave-like pattern. Several extreme pressure values occurred within 8 s, with the peak pressure at different filling ratios appearing at the first extreme point. As the filling ratio increased, both the peak pressure at the monitoring point and the time taken to reach that peak increased. The time and pressure peaks at the monitoring points corresponding to filling ratios of 0.3, 0.5, and 0.7 were 1057.49 Pa at t = 0.21 s, 1177.05 Pa at t = 0.19 s, and 1362.08 Pa at t = 0.16 s, respectively. At 2 s, the horizontal movement of the box came to rest, causing it to stop moving across all filling ratios, which resulted in a sharp descent in the monitoring point pressure at that time. The wave-like shape of the pressure variation curve can be attributed to back-and-forth movement of the liquid relative to the pesticide tank under the influence of inertia. Eventually, the liquid level stabilized, causing the pressure on the inner wall to return to its initial static value.
From
Figure 9, it is evident that while the three curves generally trend in the same direction, the pressure variation range during the deceleration process differed across filling ratios. Specifically, aside from the first pressure peak, the pressure variation range with a filling ratio of 0.7 was notably smaller when the filling ratios were 0.3 and 0.5. Numerical simulation cloud maps suggest that a higher liquid filling ratio resulted in an intense liquid splashing that generated numerous bursting bubbles, contributing to an increased first pressure peak. However, due to the confines of the pesticide tank and the effect of inertial force, the range of pressure fluctuations exhibited a downward trend after that initial peak was achieved. Once the acceleration excitation subsided, the liquid fluctuations for a filling ratio of 0.7 were less pronounced than those for filling ratios of 0.3 and 0.5. Based on the numerical simulation cloud maps in
Figure 8, it can be inferred that within a certain range, a higher filling ratio corresponded to greater liquid volume and, consequently, an increased inertial force. After the pesticide tank came to a halt, the space constraints and inertial forces within the box significantly influenced the liquid fluctuations, leading to a scenario where the pressure fluctuation range became smaller with a higher filling ratio.
During the transportation of the pesticide tank, the liquid inside shakes due to acceleration, creating an overturning moment [
31,
32]. This can cause the plant protection UAV to lose its balance and potentially overturn. To address this, the variations in the sloshing moment of the liquid medicine were subsequently monitored. This enabled quantification of the effect of the liquid on the platform of the plant protection UAV flight attitude simulator during the sloshing process. In this analysis, the coordinate of (0,0,0) has been chosen as the center of the moment and the y-axis as the moment axis for calculation purposes.
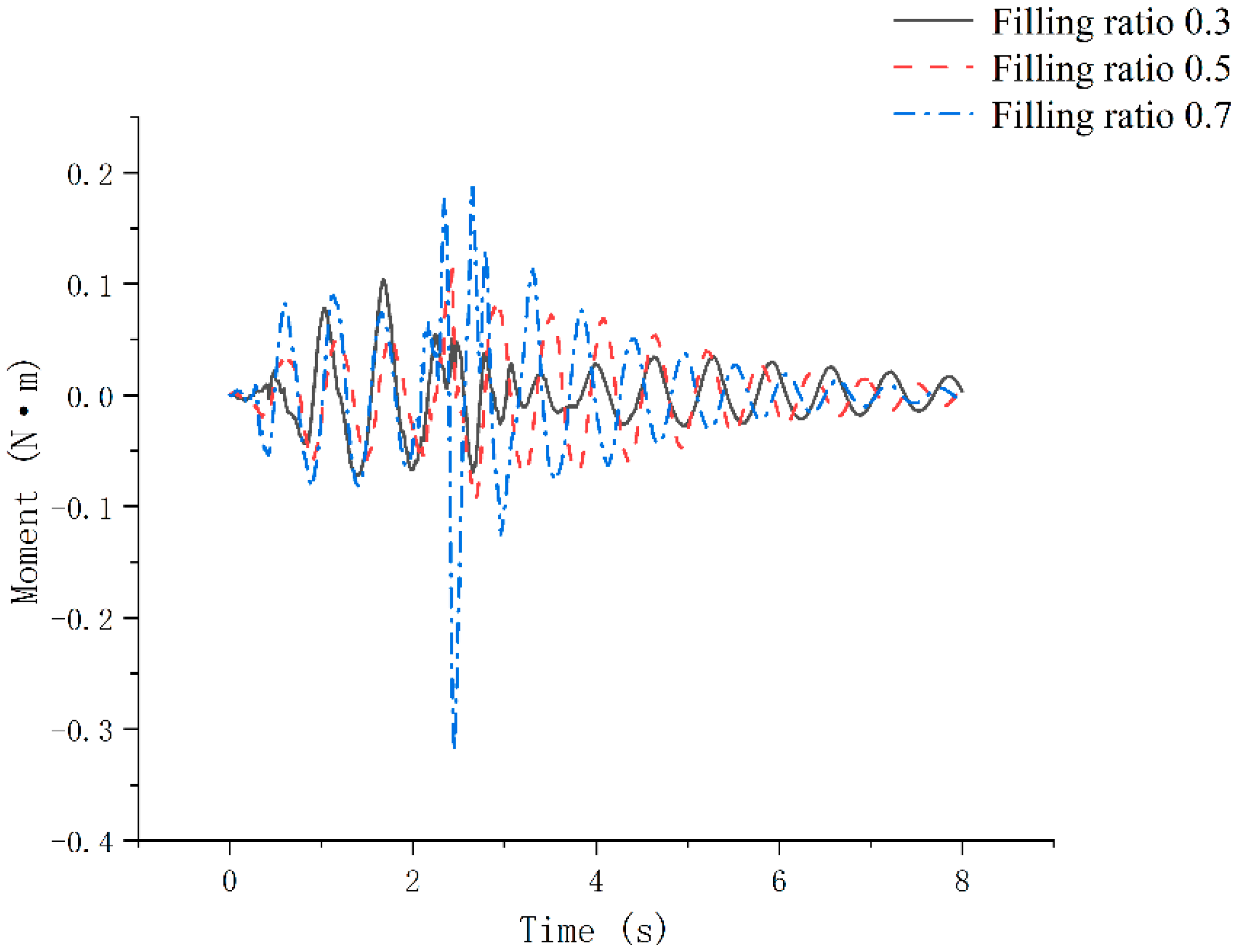
Figure 10 shows the variation curves of the sloshing torque in the pesticide tank at filling ratios of 0.3, 0.5, and 0.7. The sloshing torque of the medicine demonstrated a wave-like pattern, increasing until it reached a peak before decreasing again in a similar manner. The overturning effect on the upper platform first increased, and then diminished until it nearly became negligible. Additionally, within an 8 s timeframe, multiple extreme values of the sloshing torque were observed. The peak values for the sloshing torque of the medicine and times corresponding to the filling ratios of 0.3, 0.5, and 0.7 were measured as follows: 0.1041 N·m at t = 1.68 s, 0.1137 N·m at t = 2.43 s, and 0.3200 N·m at t = 2.45 s, respectively. As the filling ratio increased, the peak value of the liquid sloshing torque also arose, although a delay in the time taken to reach this peak was observed. Even after the acceleration ceased, the medicine in the pesticide tank continued to slosh under various filling ratios; thus, the sloshing torque remained active on the upper platform. However, in the absence of external excitation, the value of the sloshing torque fluctuated and gradually declined. Ultimately, the liquid level stabilized, and the sloshing torque approached zero, nearly eliminating the overturning effect on the upper platform.
The torque curves displayed in
Figure 10 exhibited almost similar tendencies with time. When accelerating the box before the attainment of the peak sloshing torque of the liquid medicine, the range of variations in the sloshing torque for the pesticide tank with a filling ratio of 0.7 was found to be significantly larger than that for boxes with filling ratios of 0.3 and 0.5. Based on the numerical simulation cloud maps in
Figure 8 and the pressure change curve in
Figure 9, it can be inferred that at a filling ratio of 0.7, the liquid content was observed to be higher, and the geometric center of the liquid was farther from the center of the sloshing torque. This resulted in a larger force arm and mass of the liquid, thus generating greater sloshing force during the sloshing process. Higher filling ratios yielded greater sloshing torques in the liquid. Subsequently, the time required for the sloshing torque in the liquid medicine to approach zero was reduced, leading to a quicker reduction in the impact on the overturning of the upper platform.
3.2. Simulation Results of Pesticide Tank Sloshing Under the Climbing Posture of Plant Protection UAV
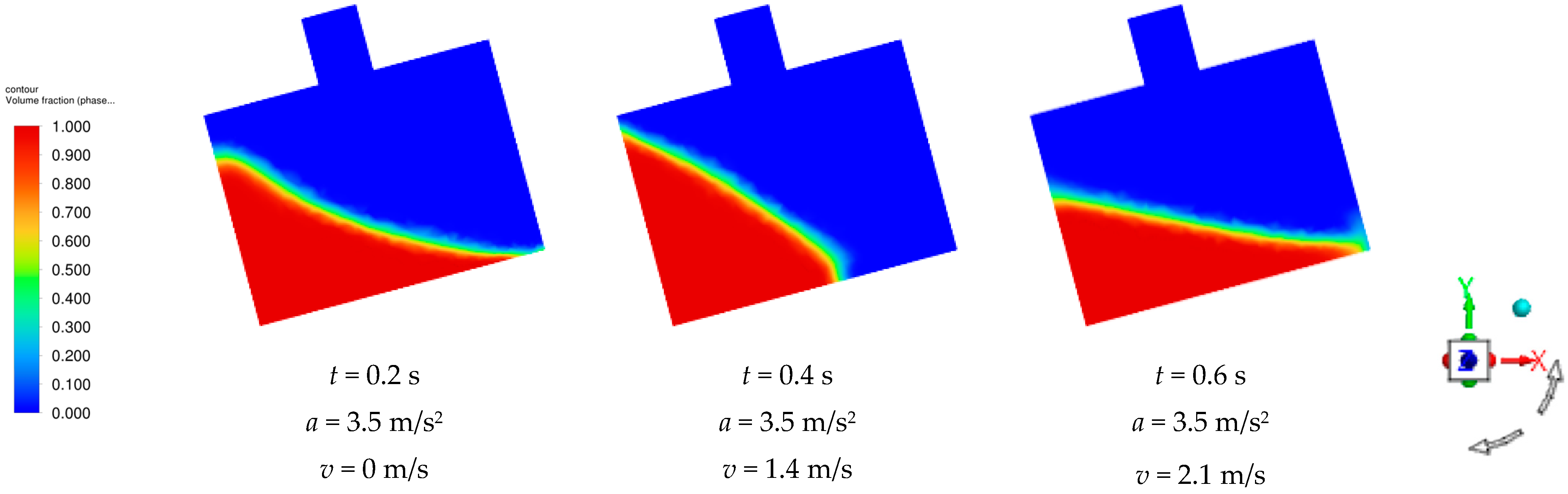
During the ascent of the plant protection UAV, the drone and the pesticide tank were positioned at an angle of 15° relative to the horizontal. In the numerical simulation, an acceleration of 3.5 m/s
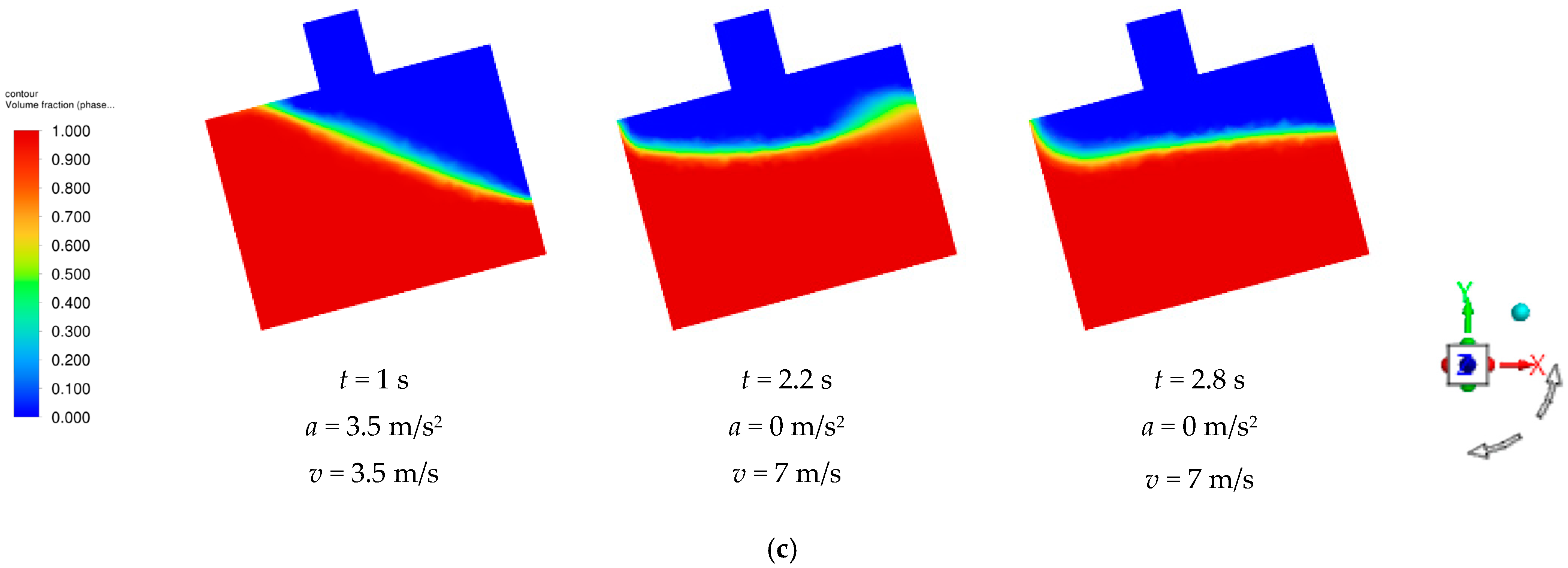
2 was applied to the pesticide tank in the plant protection UAV for a duration of 2 s at an angle of 15°. This simulated the flight attitude of the plant protection UAV during the climbing posture. The acceleration was introduced into the calculation domain through a UDF file. The cloud maps of the numerical simulation results for the filling ratios of 0.3, 0.5, and 0.7 in the pesticide tank are shown in
Figure 11. Under the influence of acceleration, the pesticide tank began to move. Due to the combined effect of gravity and inertia, the liquid level in the medicine tilted towards the left inner wall with continuous variation in the tilt amplitude observed with time. Once the acceleration came to zero, the pesticide tank maintained a speed of 7 m/s. However, due to the effects of gravity and inertia on the medicine solution, combined with the constraints imposed by the inner walls of the pesticide tank, the liquid level began to fluctuate uncontrollably. This fluctuation gradually decreased in amplitude until it eventually returned to its initial horizontal state.
Figure 11 shows the numerical simulation results for a pesticide tank at filling ratios of 0.3, 0.5, and 0.7. A comparison of these results indicated that the overall relative motion of the medicine was largely consistent across all filling ratios. Analyzing the cloud diagrams from the numerical simulations portrayed in
Figure 8, it became evident that the fluctuations in the liquid within the pesticide tank decreased with a corresponding increase in the filling ratio. This reduction in fluctuation was particularly important since liquid spray can lead to droplet splashing as well as the formation and rupture of bubbles. Furthermore, a pesticide tank with a higher filling ratio exhibited less fluctuation and returned to its initial state rapidly once the acceleration became zero.
By setting monitoring points to quantify the pressure changes on the inner wall of the pesticide tank, as shown in
Figure 11, the left side of the inner wall of a pesticide tank was determined to be significantly affected by the solution surge during the ascent state of the box. Therefore, this work analyzed the monitoring point data from the left inner wall of the pesticide tank situated at 60% of the liquid level height for performing measurements.
Figure 12 shows the pressure changes in the pesticide tank during its ascent at filling ratios of 0.3, 0.5, and 0.7. The pressure at the monitoring point elevated rapidly to its maximum value within a short period and then gradually decreased. Several extreme pressure values appeared within 8 s, with the peak pressure for different filling ratios occurring at the first extreme point. Specifically, the peak pressures recorded at the monitoring points for filling ratios of 0.3, 0.5, and 0.7 were 935.68 Pa at t = 0.28 s, 907.98 Pa at t = 0.22 s, and 1075.07 Pa at t = 0.16 s, respectively. Initially, as the filling ratio increased, the peak pressure decreased and then began to rise again. A comparison of the pressure change curves for different filling ratios in the pesticide tank during an emergency stop state, as shown in
Figure 9, indicated that this behavior can be attributed to both the drone and the pesticide tank being oriented at a 15° angle to the horizontal during the ascent. At 2 s into the climb, the pressure at the monitoring point suddenly dropped for all filling ratios, resembling the pressure change patterns observed during an emergency stop, as illustrated in
Figure 9, for the same reasons.
From
Figure 12, it was evident that the three curves roughly followed the same behavior. However, during the acceleration phase, the fluctuation range of the pressure in the pesticide tank with a filling ratio of 0.7 was significantly smaller than that observed with filling ratios of 0.3 and 0.5. Additionally, as the filling ratio increased, the pesticide tank reached its peak pressure rapidly. The fluctuation range of pressure in the pesticide tank with a higher filling ratio became smaller as the acceleration smoothed out with rapid stabilization of the liquid level.
Figure 13 shows the variation in sloshing torque in the pesticide tank at filling ratios of 0.3, 0.5, and 0.7. The sloshing torque increased in a wave-like pattern until it reached a maximum value, after which it decreased in a similar wave-like manner. The overturning effect on the upper platform was initially found to be arising and began to decline afterwards. As the filling ratio elevated, both the peak value of the sloshing torque of the medicine and the time required to attain this peak subsequently increased. The peak sloshing torque values and their corresponding times for filling ratios of 0.3, 0.5, and 0.7 were measured as follows: 0.0368 N·m at t = 6.96 s, 0.0454 N·m at t = 5.47 s, and 0.1153 N·m at t = 3.99 s, respectively. Due to limitations in ANSYS 2022 R1 Fluent software, which cannot directly monitor the horizontal sloshing torque of the pesticide box during the ascent of the plant protection UAV, the monitored liquid sloshing torque values eventually stabilized at a non-zero value. The final stable sloshing torque values for the solution at filling ratios of 0.3, 0.5, and 0.7 were recorded as −0.0200 N·m, 0.0250 N·m, and −0.0050 N·m, respectively.
A similar tendency in the sloshing torque with respect to time was observed as is evident in
Figure 13. When subjected to acceleration excitation, the variation in the sloshing torque of the pesticide tank with a filling ratio of 0.7 was significantly greater than that of the boxes with filling ratios of 0.3 and 0.5, as observed before attaining the peak sloshing torque. Additionally, the time taken to reach this peak was shorter for the 0.7 filling ratio, resulting in a reduction in the time required for the sloshing torque to be stabilized. By combining the numerical simulation results shown in the cloud maps of
Figure 11 with the pressure change curves depicted in
Figure 12, analysis showed that a filling ratio of 0.7 resulted in a higher liquid content, which in turn enhanced the inertial force. After the acceleration excitation diminished, spatial constraints and inertial forces significantly influenced the liquid’s fluctuation levels. This led to a quicker return of the liquid level to a stable state and a smaller range of pressure fluctuations. Hence, a larger filling ratio corresponded to a shorter duration for the sloshing torque to stabilize and a more rapid reduction in the impact on the overturning of the upper platform.
3.3. Simulation Results of the Sloshing of the Pesticide Tank in the Flying Attitude of the Plant Protection UAV Around the Point
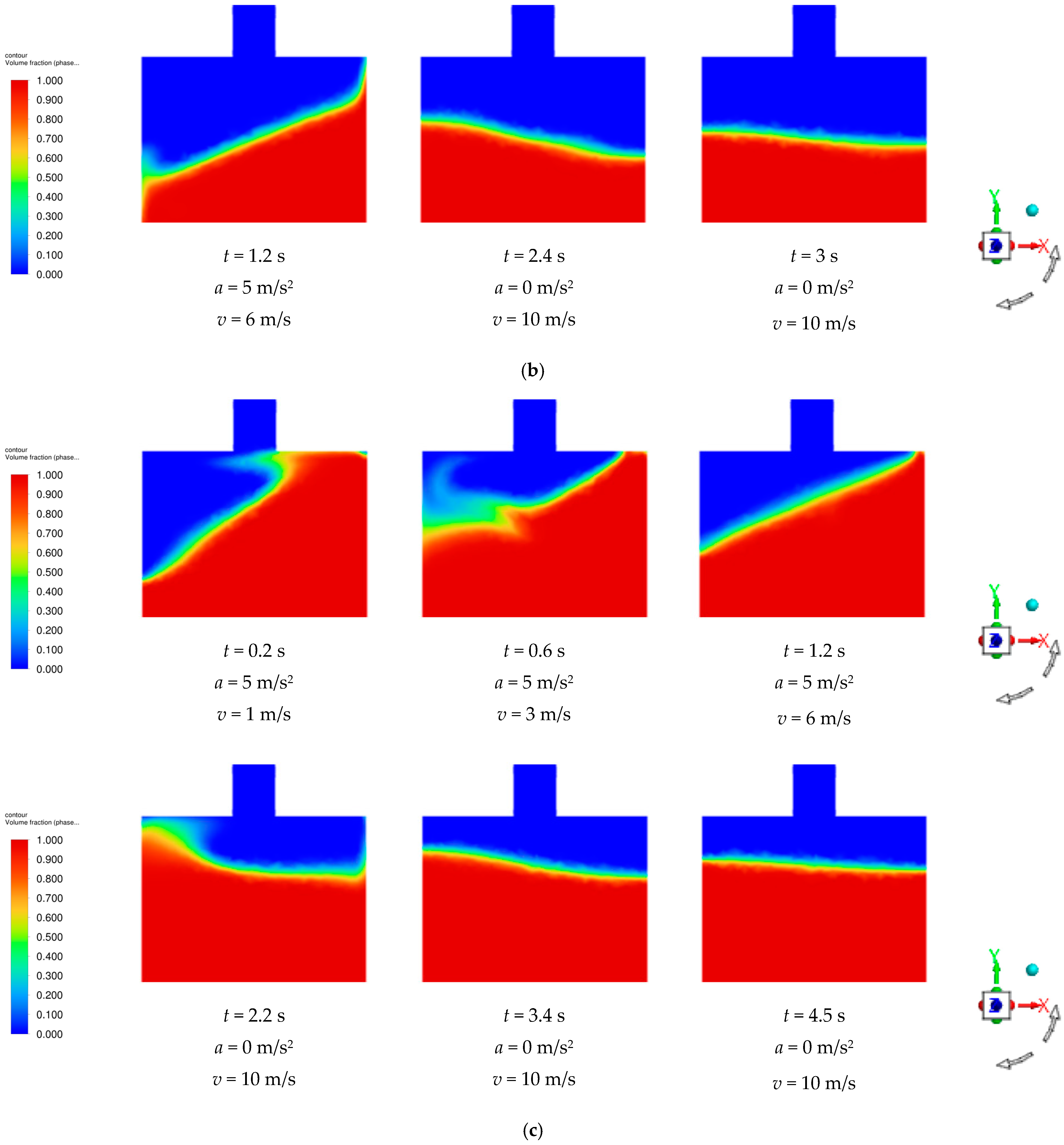
When the plant protection UAV is flying around a designated point, the pesticide box attached to it moves in a circular motion. Since the box does not have a fixed reference plane for describing the numerical simulation results based on a cloud map at any instant in time, this work creates a reference plane for the movement of the pesticide tank while the UAV is in flight. This reference is based on three key points: the coordinate origin, the center of the bottom of the pesticide tank, and the center of the top of the box. During the numerical simulation, a horizontal circumferential angular velocity of 1.5 rad/s was applied to the pesticide box to replicate the UAV’s flight attitude while circling a point. The angular velocity excitation was implemented in the simulation using a UDF file. The cloud maps illustrating the numerical simulation results for filling ratios of 0.3, 0.5, and 0.7 in the pesticide tank are presented in
Figure 14. As depicted in the figure, the pesticide tank exhibited a circular motion around a point under the influence of angular velocity. Due to centrifugal force, the liquid level of the medicine inside the box tilted away from the center of rotation. The amplitude of the tilt varied continuously over time until the liquid and the pesticide tank stabilized at a certain tilt angle.
Several cloud maps derived from the numerical simulation results of the pesticide tank at filling ratios of 0.3, 0.5, and 0.7 are shown in
Figure 14. A comparison revealed that the overall relative motion of the medicine solution remained similar across these filling ratios. However, substantial generation and rupturing of bubbles were observed with an increasing filling ratio that led to an intense formation of centrifugal force in the medicine with a reduction in the overall fluctuation in the medicine solution relative to the pesticide tank. Meanwhile, over time, both the medicine solution and the pesticide tank quickly achieved relative stability.
To quantify the pressure changes on the inner wall of the pesticide tank, monitoring points were established. As shown in
Figure 14, the inner wall of the pesticide tank, particularly on the side away from the rotation center, was significantly affected by the swirling motion of the medicine solution during its flight around a specific point. For this analysis, a monitoring point located at 60% of the liquid level on the inner wall was selected. This point is located opposite the rotation center and aligns with the reference plane of the pesticide tank’s motion in the posture of the fruit tree for measurement purposes.
Figure 15 illustrates the pressure variation curves of the pesticide tank at filling ratios of 0.3, 0.5, and 0.7 during point flight. The pressure at the monitoring point initially rose to a peak quickly and then decreased in a wave-like pattern. Increasing the filling ratio resulted in a corresponding rise in both the peak pressure and the time taken to reach that peak. The peak pressure values at the monitoring points that correspond to the filling ratios of 0.3, 0.5, and 0.7 were recorded as follows: 1148.34 Pa at t = 0.23 s, 1293.71 Pa at t = 0.22 s, and 1463.37 Pa at t = 0.2 s, respectively. In this state, the angular velocity excitation continued to act on the pesticide tank. With a moving pesticide tank, a gradual reduction in the amplitude of the medicine sloshing was observed that subsequently stabilized, leading to a fixed inclination angle between the medicine and the pesticide tank. Consequently, the pressure against the inner wall also stabilized, resulting in stable pressure values of 1017 Pa, 1175 Pa, and 1327 Pa for filling ratios of 0.3, 0.5, and 0.7, respectively.
It is evident from
Figure 15 that the three pressure curves generally depicted similar behavior. However, during circular motion, the time needed for the liquid level in the pesticide tank with a filling ratio of 0.7 to stabilize was significantly shorter than for boxes with filling ratios of 0.3 and 0.5. Using the cloud maps in
Figure 14, it can be inferred that within a certain range, a higher filling ratio led to elevated levels of liquid content with an increased likelihood of bubble formation and rupture. Nevertheless, the spatial limitations of the pesticide tank and the centrifugal force both exerted significant influence on the fluctuation in the liquid. This may lead to a scenario where a higher filling ratio may shorten the time required for the liquid and the pesticide tank to achieve a relatively stationary state.
The graphs depicting the variation in sloshing torque of the liquid medicine at filling ratios of 0.3, 0.5, and 0.7 are shown in
Figure 16. It was noted that the sloshing torque initially reached a peak value relatively quickly and then waned in a wave-like pattern, gradually diminishing the overturning effect on the upper platform. The peak values of the sloshing torque and corresponding times for filling ratios of 0.3, 0.5, and 0.7 were recorded as follows: 8.4364 N·m at t = 0.98 s, 8.2708 N·m at t = 0.24 s, and 7.8108 N·m at t = 0.2 s, respectively. With an increasing filling ratio, the sloshing torque of the medicine exhibited a decline in its peak value while the time needed to attain the peak value increased. The sloshing torque of the medicine solution varied with changes in angular velocity. Notably, the sloshing of the medicine solution gradually became stable with the operating pesticide tank, resulting in consistent pressure on the inner wall. Ultimately, the final sloshing torque of the medicine solution approached zero, leading to almost negligible overturning effects on the upper platform.
The sloshing torque exhibited similar trends concerning filling ratios during flight, as evident from
Figure 16. During circular motion, the time required for the sloshing torque of the medicine solution to approach zero with a filling ratio of 0.7 was substantially smaller than for boxes with filling ratios of 0.3 and 0.5. A higher liquid content was associated with a filling ratio of 0.7, as demonstrated by cloud maps in
Figure 14 and the pressure variation curves in
Figure 15. Consequently, it can be concluded that both the liquid medicine and the pesticide tank can rapidly achieve a relatively stable state when subjected to strong centrifugal force. A higher filling ratio resulted in a decreased time necessary for the sloshing torque of the medicine to reach zero value, facilitating a quick reduction in the impact on the overturning of the upper platform.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}