1. Introduction
The growing demand for a stable food supply [
1], driven by rapid population growth, has motivated the development of new processes and techniques involved in agricultural production, spanning from crop planting to harvest management. One of the approaches that has seen the most interest in recent years is the automation of these tasks [
2]. By integrating new technologies to support human labor, the goal is to reduce production time and increase yield. One of the tasks that has become a focal point of these efforts is crop harvesting, particularly for fruits. Various technologies are employed for fruit harvesting, depending on the type of fruit. For example, vibration is commonly used for olives, while cutting is preferred for eggplants. However, for fruits such as tomatoes, grasping is one of the most widely used techniques, followed by the necessary motion to achieve detachment [
3]. Nowadays, many robotics solutions rely on rigid grippers, focusing primarily on the harvesting process itself. However, a major challenge in these systems remains post-harvest fruit condition, as mechanical damage caused during gripping can lead to premature decay, financial losses, and reduced consumer acceptance. Despite advancements in soft robotics, most harvesting grippers prioritize fruit detachment efficiency over damage mitigation, failing to integrate strategies that reduce bruising and preserve fruit quality. The lack of optimized grasping technologies highlights the need for further innovation in soft grasping interfaces, ensuring a balance between secure fruit handling and minimal mechanical impact. This article explores this gap, focusing on the fruit’s condition both during and after harvesting, offering a better understanding of the process while enabling a better design of the gripper.
The gripping phase of the harvesting process is particularly critical, as it requires firm but gentle contact with the fruit to prevent slippage while avoiding excessive pressure that could lead to bruising. Existing robotic grippers typically follow one of two grasping strategies: displacement-based gripping [
4,
5,
6] and force-controlled gripping [
7,
8]. The displacement-based approach uses a predefined movement range, calibrated to accommodate the fruit within the gripper [
4]. This method simplifies gripper control but has significant drawbacks. If the fruit is smaller than the predefined movement range, the gripper fails to secure it properly. Conversely, if the fruit is larger than the predefined movement range, the harvesting action may result in serious bruising. Some adaptive grippers within this category incorporate deformable structures that yield under excessive pressure, helping to minimize damage [
9]. However, these adaptive displacement-based grippers rely on passive structural deformation rather than active force regulation. In contrast, the force-controlled approach maintains a constant gripping force, adjusting to different fruit sizes [
7]. These grippers utilize sensor feedback to actively modulate their applied force, ensuring a secure grasp without excessive compression. Similar to displacement-based grippers, force-controlled grippers yield under pressure to conform to the shape of the object [
10]. However, they introduce greater complexity, requiring high-precision manufacturing, advanced control algorithms, and complex calibration processes. This results in increased costs and implementation challenges, particularly when traditional manufacturing technologies are used. Thanks to advancements in 3D printing technologies and the use of hyperelastic materials, designs based on these approaches are becoming increasingly feasible, enabling delicate handling with simplified control strategies.
To enhance adaptability, it is possible to combine both types of end-effectors by adapting traditional rigid grippers with additional soft components, serving as compliant contact surfaces to conform to the shape of the object while minimizing potential bruising. This adaptability can be achieved with or without additional actuation or control mechanisms. The former, known as active adaptation [
11] relies on actuators or external control systems to dynamically modify the gripper’s shape, ensuring optimal contact and minimal applied force. However, this approach requires precise modeling of the target fruit to optimize friction and avoid damage. The latter, known as passive adaptation, relies solely on the physical interaction between the gripper and the object to achieve shape conformity, requiring no additional actuation or external control [
12]. This makes passive soft grippers a promising solution for agricultural applications, offering low complexity, reduced cost, and improved fruit handling performance.
This article proposes and analyzes several soft grasping interfaces designed for integration with traditional robotic grippers, enabling the manipulation of delicate objects, such as tomatoes, during autonomous harvesting operations.
The remainder of the article is structured as follows:
Section 2 examines the material used in this study, describes the primary manufacturing methods applied, and outlines the proposed designs for the soft interfaces. Then,
Section 3 details the results from the experimental tests conducted.
Section 4 discusses the findings, integrating insights from both the pull-off and bruising tests to assess the overall performance and applicability of each soft interface in agricultural contexts. Finally,
Section 5 summarizes the key conclusions and provides insights into future research directions.
2. Materials and Methods
The platform selected for installing the soft interfaces is the Dual-arm YuMi
®—IRB 14000 [
13], a collaborative robotic system equipped with traditional rigid parallel grippers. YuMi
® features two 7-axis arms, providing high dexterity in object manipulation along with ease of operation and control.
Figure 1 presents a visual representation of this model along with its key technical characteristics.
To develop the soft interfaces, Autodesk Inventor was used for 3D modeling. Once the base designs were completed, Ultimaker Cura was utilized as the slicing software to generate the G-code for 3D printing, optimizing the print settings for flexible filament fabrication. The infill patterns and structural variations were incorporated at this stage to evaluate their mechanical adaptability.
The soft interfaces were manufactured using a Creality Ender-3 3D printer, which was adapted into a direct drive system to support the extrusion of soft filaments. Thermoplastic elastomer (TPE) filament, with a Shore hardness of 70A and a tensile strength of 32 MPa, was selected as the primary material due to its hyperelastic properties, which enable deformation under low forces while ensuring durability. TPE exhibits high resistance to fatigue and mechanical stress, making it well-suited for repeated grasping actions without significant degradation. Additionally, its ability to maintain elasticity over extended use contributes to prolonged service life, reducing the need for frequent replacements. Previous studies have demonstrated that TPE maintains its structural integrity under cyclic loading, ensuring consistent grasping performance throughout multiple harvesting cycles [
14].
To maintain consistent material properties across all interfaces, specific printing parameters were used, including nozzle diameter, layer height, infill percentage, and temperature settings. These parameters, which are detailed in
Table 1, were optimized to achieve proper layer adhesion and ensure repeatability in mechanical behavior.
With these optimized material properties and printing parameters in place, the next step was to assess the mechanical performance of the proposed soft interfaces. However, one of the main challenges in characterizing soft structures, particularly for agricultural applications, is the lack of standardized testing methods. This limitation makes it difficult to compare new developments with existing solutions and to establish clear acceptance and rejection criteria for their implementation. To address this, we designed and implemented a structured testing methodology, focusing on tomatoes as a test case. The experimental framework consisted of two key tests to evaluate and compare the mechanical behavior of the soft interfaces: a pull-off test, which quantifies detachment forces, and a grasping force test, which assesses gripping efficiency and potential bruising on tomato fruit. The following subsections detail the methodology used in these evaluations.
2.1. Initial Pull-Off Test
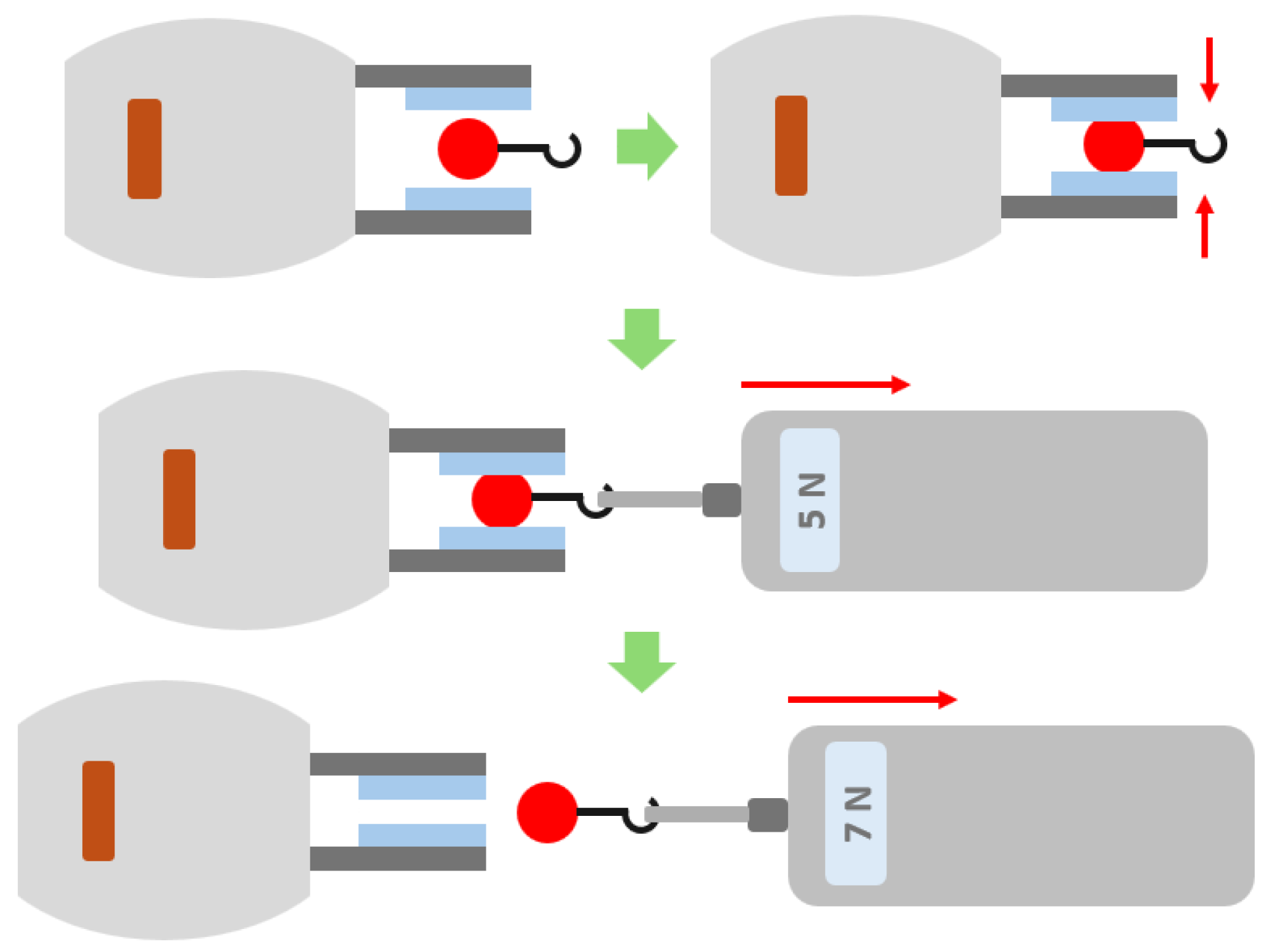
The first step in evaluating soft interfaces for robotic harvesting is to characterize how well each design holds the fruit against pulling forces at different grip levels. This test provides quantitative insight into which interface requires the least force to achieve a stable grip, thereby minimizing potential damage to the tomato during harvesting operations. The experimental assembly and testing methodology are shown in
Figure 2. A synthetic tomato model was fabricated using polylactic acid (PLA), with a 20 mm external diameter, representative of average cherry tomato size [
15]. The plastic mock was designed with a hook attachment point to allow for controlled application of pulling forces. The main reason for using a synthetic tomato in this test was to ensure consistency in friction readings across all trials. Although a real tomato may produce different results due to potential damage or deformation, it would introduce variability that could compromise the accuracy and comparability of the measurements obtained in this study. The test was then performed as follows. To conduct the test, one of the robotic arms was positioned horizontally, with the soft interfaces aligned perpendicular to the floor plane. The synthetic tomato was then placed between the soft interfaces, and gripping forces ranging from 4 N to 20 N were applied. Once the interface secured the synthetic fruit, a pulling force was applied via a dynamometer until the gripper could no longer hold it. The maximum pull-off force recorded before failure was then noted for each soft interface design. This method was repeated for all four soft interfaces. To ensure measurement consistency, the weight of the tomato dummy was kept constant across all tests, preventing force readings from being affected by variations in object weight. This consistency allowed for a reliable comparison of pull-off force performance among different interfaces.
2.2. Grasping Force and Bruising Test Procedure
Mechanical handling of tomatoes can lead to both superficial and internal bruising, which typically manifest days after initial contact. Based on previous experimental findings, this study examines the long-term effects of different applied forces on mature cherry tomatoes using the proposed soft interfaces. The assembly for this grasping force test was similar to the setup described in
Section 2.1. For each soft interface, an applied force ranging from 4 N to 20 N was exerted on mature cherry tomatoes, alongside a control sequence using the YuMi robot’s rigid SmartGripper. A different set of tomatoes was used for each force level, and its condition was observed and monitored over a period of four days following the test. To systematically track bruise progression in tomatoes, a bruise classification key was developed, as shown in
Table 2. The bruising was categorized into three distinct levels based on severity. A Value of 1 was assigned to cases where no visible bruise was observed. A Value of 2, classified as superficial bruising, referred to visible deformation or damage that was limited to the skin of the tomato. Finally, a Value of 3 indicated internal bruising, characterized by significant damage beneath the skin, which could be detected either visually or by touch. Each tomato’s condition was assigned a numerical value according to this classification, and the average damage value for each tomato sample was recorded and plotted on a graph for further analysis. To avoid any possible deviation in the results, two tomatoes were used for each measurement. Their condition was then transcribed into numerical values using the mentioned damage key. The average value was then calculated and transcribed back into the corresponding damage. Overall, 90 tomatoes were tested.
Building on the testing methodology, the next step focused on the structural design of the soft interfaces. The selection of appropriate patterns is fundamental to balancing force distribution, adaptability, and fruit protection. The following section details the design process, focusing on the rationale behind the chosen infill patterns and their expected mechanical behavior under grasping conditions.
2.3. Soft Interfaces Design
As mentioned before, the main goal of this study is to develop and analyze passive soft interfaces for harvesting and pick-and-place operations, focusing on tomatoes as a test case. Tomato crops have been widely researched in automation, given their simple cultivation process and fast growth cycles. However, no significant studies have been found that explicitly address the quantification or direct comparison of damage caused by soft grippers during fruit manipulation. Although some studies have focused on approaches to minimize such damage [
6,
8], this topic remains underexplored, underscoring the need for further investigation and standardized testing.
To fill this gap, we propose four soft interface designs and evaluate their mechanical behavior to determine the most adaptable and damage-resistant structure. The findings will serve as a reference for future soft gripper developments.
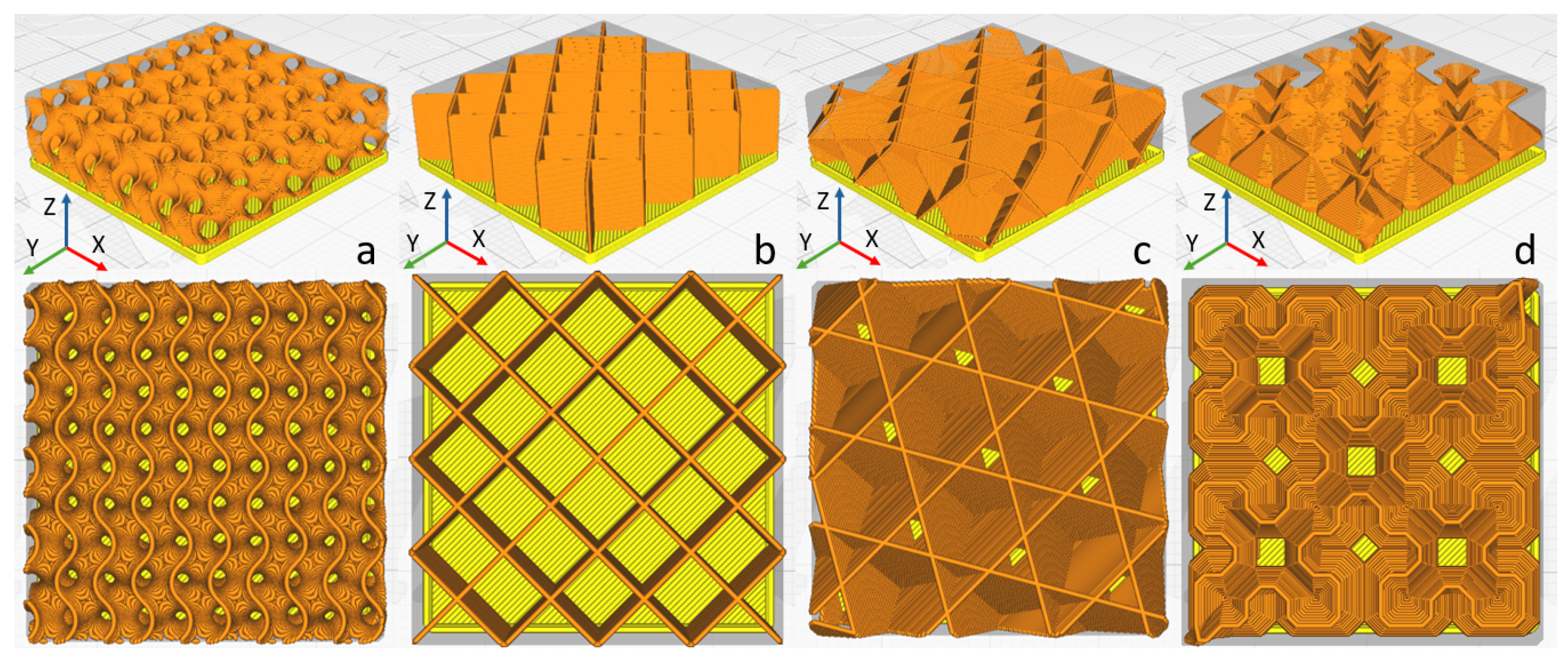
Four distinct soft interface patterns were selected for evaluation based on their mechanical response under gripping conditions: gyroid, grid, cubic, and cross 3D infill. Each structure was designed to balance force distribution, adaptability, and fruit protection, ensuring gentle yet effective grasping.
The gyroid pattern was chosen for its pseudo-isotropic properties, providing uniform resistance and deformation across all axes. This ensures even force distribution, reducing localized pressure points that could damage the fruit. Mathematically, the gyroid structure follows a trigonometric formulation where its periodic surface is defined by the equation:
This formulation ensures that each spatial coordinate is coupled through sinusoidal and cosine functions, leading to its pseudo-isotropic mechanical behavior. While this property provides equal resistance in all directions, it does not allow the structure to concentrate gripping force efficiently, which may reduce its overall pull-off performance compared to anisotropic designs. Given these mechanical characteristics, the gyroid pattern is hypothesized to exhibit weaker pull-off forces but better force distribution, reducing pressure points on delicate fruits. The grid pattern represents an anisotropic structure, offering greater resistance to deformation along the Z-axis compared to the X and Y directions. This structure is particularly effective for applications where vertical stability is required. The cubic pattern was selected for its ability to adapt to different shapes, exhibiting greater flexibility in the Z-direction. This characteristic allows it to conform effectively to the curved surface of tomatoes. Finally, the cross-3D pattern features localized collapse behavior, which enables selective deformation under applied pressure. This structure helps distribute force evenly while preventing localized stress points, making it particularly useful for shock absorption during harvesting.
To facilitate integration with various gripper designs found in the literature, accessible infill patterns from widely used slicing software, such as Ultimaker Cura, were employed. Printing adjustments were necessary to remove outer layers, exposing the infill structure as the contact surface to improve adaptability and force distribution. For this, an overall size of 30 × 30 × 10 mm was used for each soft interface, ensuring compatibility with the dimensions of a typical cherry tomato.
The proposed soft interfaces are shown in
Figure 3. While these patterns were selected for their mechanical properties, their successful implementation depends on precise manufacturing techniques. The next section details the fabrication process, including printing parameters, and structural integration with the robotic system.
2.4. Manufacturing
The fabrication of soft interfaces using hyperelastic materials, such as TPE 70A, presents significant challenges in 3D printing, primarily due to their flexibility and high deformability. These properties require specialized extrusion techniques to ensure structural integrity and consistent print quality [
16]. As discussed in
Section 2, these challenges were addressed by modifying an Ender 3 3D printer into a direct drive system, enabling precise control over filament extrusion. This adaptation allowed for the successful fabrication of flexible structures.
To ensure consistent material properties and repeatability, precise printing parameters were established. These settings were optimized to maintain layer adhesion, ensuring that each soft interface retained comparable mechanical properties.
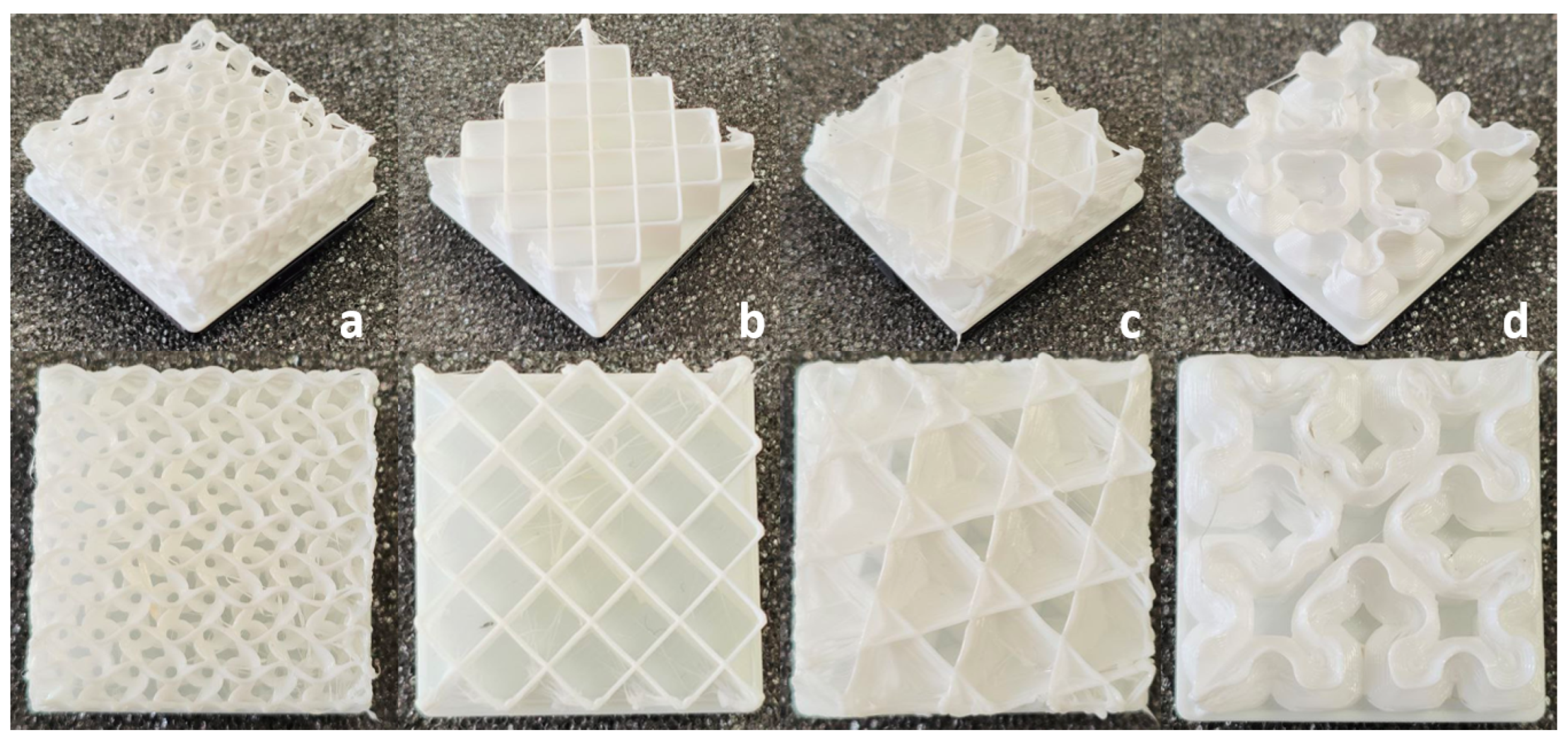
Among these parameters, infill density played a crucial role in balancing flexibility and structural stability. A 15% infill density was selected as the minimum successfully printed density for TPE 70A filament, ensuring that the interfaces remained sufficiently flexible for fruit handling. Given that cherry tomatoes require lower gripping forces than other medium-sized fruits, this parameter was adjusted to maintain an appropriate deformation range while preserving gripping stability. The final fabricated soft structures are shown in
Figure 4.
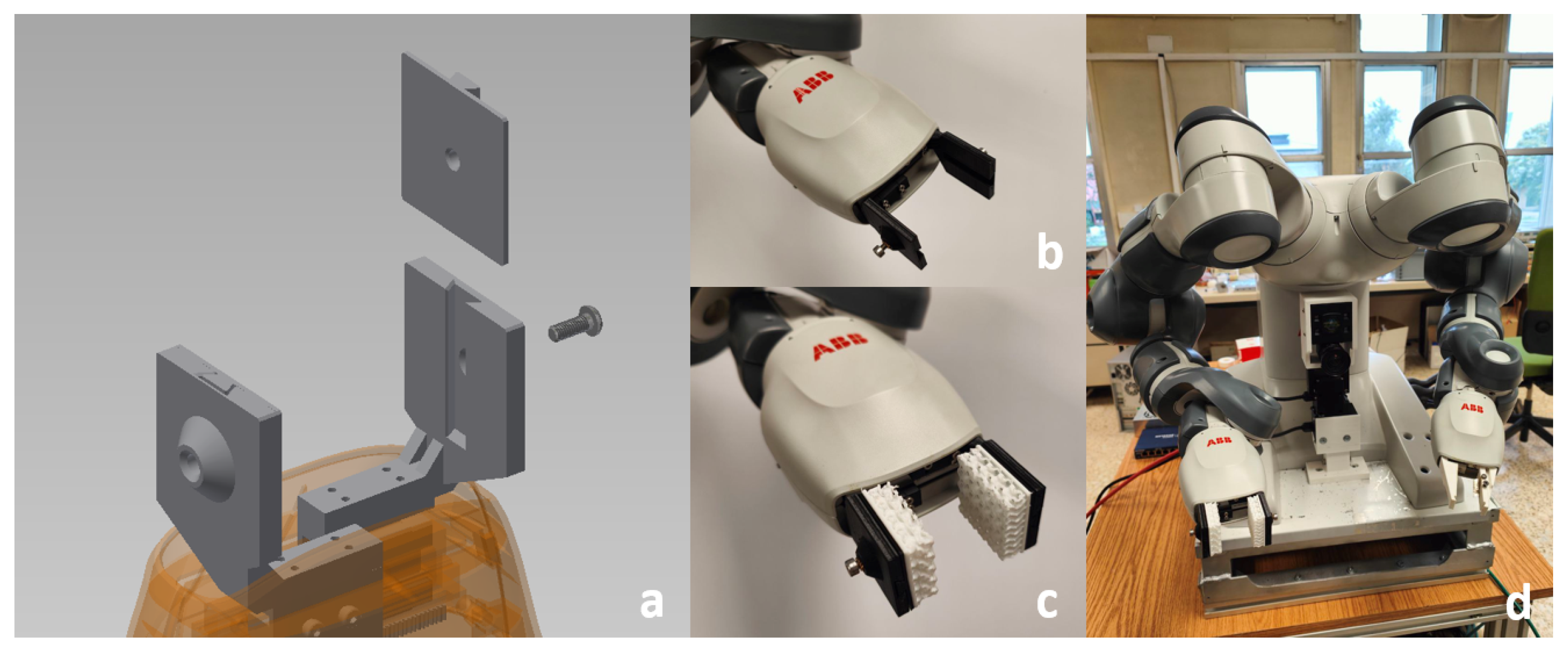
Once fabricated, the soft interfaces were securely integrated into the robotic system. To facilitate this, a modular mounting structure was designed (
Figure 5) to replace the stiff fingers of YuMi’s SmartGrippers. This system enables rapid swapping of soft interfaces as needed. Each interface was glued onto rigid slides and secured using a dovetail-type slider with an adjustable screw, enabling rapid replacement when switching between interface designs.
While this study focuses on cherry tomatoes, it is important to consider that the geometry, material, and pattern size of the soft interfaces could require adjustments for different fruits or vegetables. Further testing is needed to determine whether these results can be extended to other crops or if new interfaces and materials should be explored for optimal performance across various agricultural applications.
3. Results
With the main methodology established, the following subsections present and analyze the results obtained from the conducted tests. These findings provide key insights into the performance of each soft interface under realistic harvesting conditions, evaluating their effectiveness in securing and protecting the fruit.
3.1. Mechanical Response in Pull-Off Testing
As described in
Section 2.1, pull-off force measurements were conducted using an Imada SSII-20R dynamometer. The experimental setup involved mounting each soft interface onto the robotic gripper, securing a sample fruit, and gradually applying force until detachment occurred. The objective was to quantify the gripping efficiency and force distribution of each design under controlled conditions.
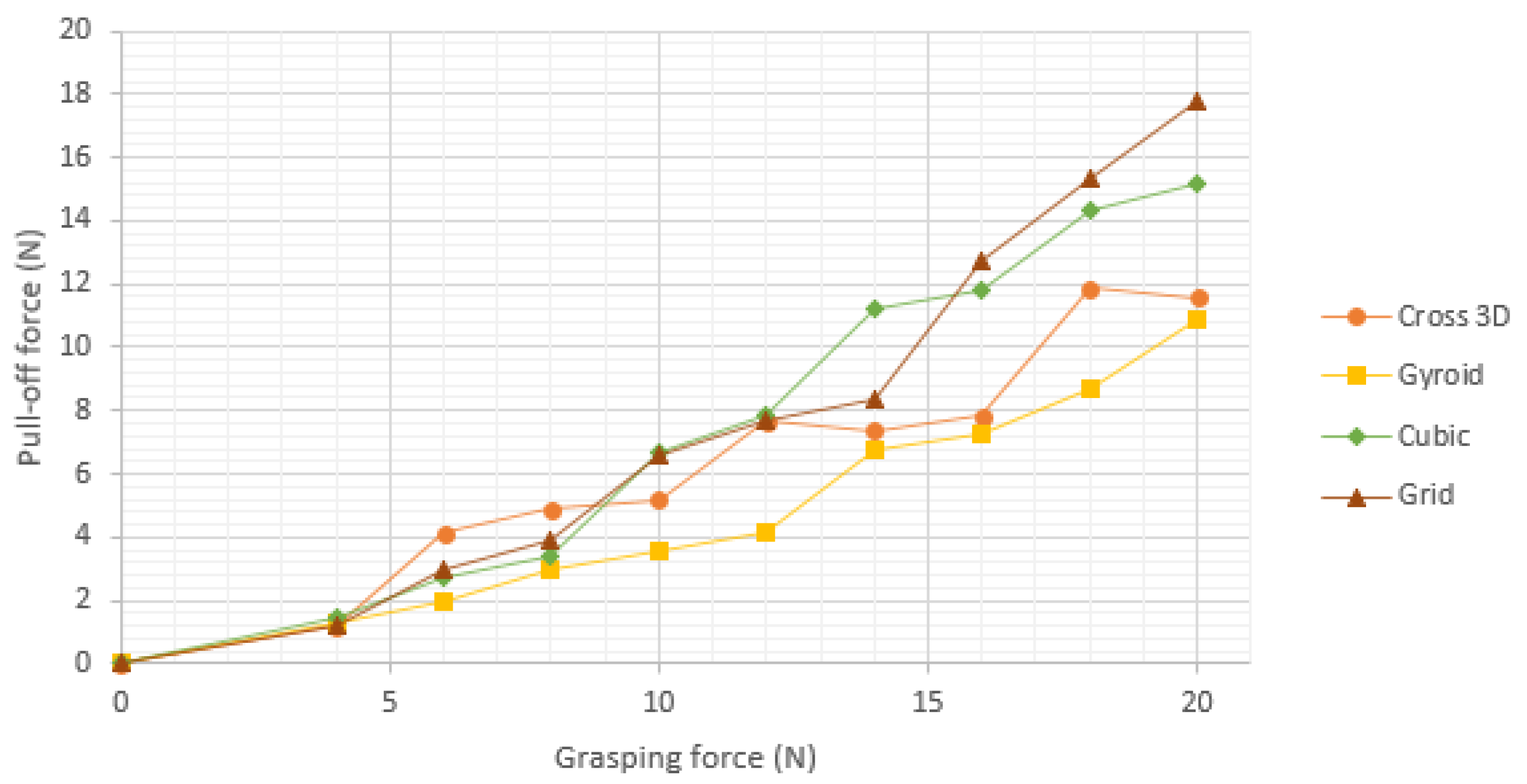
The initial pull-off test revealed distinct trends in the mechanical behavior of the four soft interfaces across different force ranges. The results identified three distinct force regions, each where a specific pattern exhibited unique performance characteristics.
At grasping forces up to 8 N, the Cross 3D infill exhibited the best performance, as its localized collapse behavior within the 6–8 N range allowed it to conform effectively to the synthetic fruit’s surface. This design enabled selective force absorption, making it particularly suitable for gripping tasks requiring controlled deformation. The Grid pattern followed closely, benefiting from its structural anisotropy, which allowed for efficient force transfer along the Z-axis while ensuring stability and minimal deformation. The Cubic pattern exhibited similar characteristics but required an estimated 3.92 N of pulling force, positioning it slightly behind the Grid pattern. In contrast, the Gyroid pattern performed the worst in this range, requiring a higher force to maintain grip. Its isotropic mechanical properties, while beneficial for uniform load distribution, resulted in less efficient gripping performance under low grasping forces.
As the applied grasping force increased to a range between 8 N and 15.5 N, the Cubic pattern emerged as the best-performing interface, nearly collapsing around the synthetic fruit and providing a stable grip. The Cross 3D pattern continued to conform effectively, maintaining some damping properties while distributing forces efficiently. This behavior suggests that both the Cubic and Cross 3D patterns can provide adaptive gripping solutions within this intermediate force range, particularly for applications requiring firm yet compliant contact with the object.
Beyond 15.5 N of grasping force, the Grid pattern displayed the highest grip force among the four designs due to its superior force transfer capabilities in the Z direction. The Cubic and Cross 3D patterns maintained their structural adaptability, while the Gyroid pattern consistently exhibited the lowest pull-off force. The Gyroid’s pseudo-isotropic nature, governed by its sinusoidal mathematical formulation (Equation (
1)), distributed forces uniformly in all three axes but lacked localized gripping efficiency, resulting in a weaker pull-off force. These results can be observed in
Figure 6.
These results highlight the potential for tailoring soft interfaces to deform predictably under specific force thresholds. By leveraging localized collapse behaviors, anisotropic structures, or adaptive shape conformity, future soft interfaces can be designed to optimize grip stability while minimizing applied force. While the literature reports a detachment force of 0.58 N to 2.46 N [
17], our internal studies have demonstrated that immature tomatoes can require substantially higher forces during harvesting. This variability justifies the inclusion of a broader force range in our graph, ensuring that the results remain relevant across different maturity stages. Despite this, our results confirm that the lower force range (≤8 N) is still the most critical for minimizing fruit damage, as excessive force increases the likelihood of bruising. Within this range, the Cross 3D pattern emerges as the most suitable option, achieving the best pull-off force while applying the least grasping pressure, thereby minimizing the risk of fruit damage. An extended study should increase the density of data points below 2.46 N to refine the evaluation of soft grippers operating within the optimal grasping force range.
3.2. Effect of Grasping Force on Tomato Bruising
Beyond detachment forces, the ability of a soft interface to securely grasp the fruit while minimizing mechanical damage is crucial for practical agricultural applications. Since bruising can develop over time and affect post-harvest quality, this test evaluates how different grasping forces influence both superficial and internal damage in cherry tomatoes. By systematically tracking the progression of bruising over four days, this analysis provides key insights into the impact of force distribution and interface design on fruit preservation. Each soft interface was tested under controlled force levels ranging from 4 N to 20 N, allowing for a structured assessment of damage severity using the bruise classification framework introduced in
Section 3.2. By correlating applied forces with observed bruising patterns, this evaluation helps determine the safest operational force range for robotic fruit handling while identifying the most suitable interface designs for minimizing damage. Following this methodology, the recorded observations enabled a comparative analysis of damage severity across different interface designs. The results are summarized in two distinct tables, providing a structured comparison of bruise severity under different applied forces.
First,
Table 3 presents the damage evaluation for tomatoes subjected to applied forces of up to 8 N. The findings indicate that the Cross 3D pattern, due to its collapsible nature, effectively conforms to the tomato’s shape, preventing internal bruising, although some superficial damage is observed when the applied force approaches 8 N. Similarly, the Gyroid pattern distributes force over a larger surface area, effectively reducing the likelihood of internal bruising.
In contrast, the Cubic and Grid patterns were observed to cause internal bruising after four days, as their structural properties failed to handle the tomato with the necessary delicacy. The rigid fingers of the YuMi SmartGripper exhibited the worst performance, causing significant damage immediately upon contact. These findings underscore the importance of soft robotics in performing delicate tasks such as handling fragile produce.
To further analyze grasping forces up to 20N, the results were consolidated in
Table 4. In this case, while the Cross 3D pattern maintained similar behavior, the other patterns led to internal bruising, which became visible on the fourth day after the test.
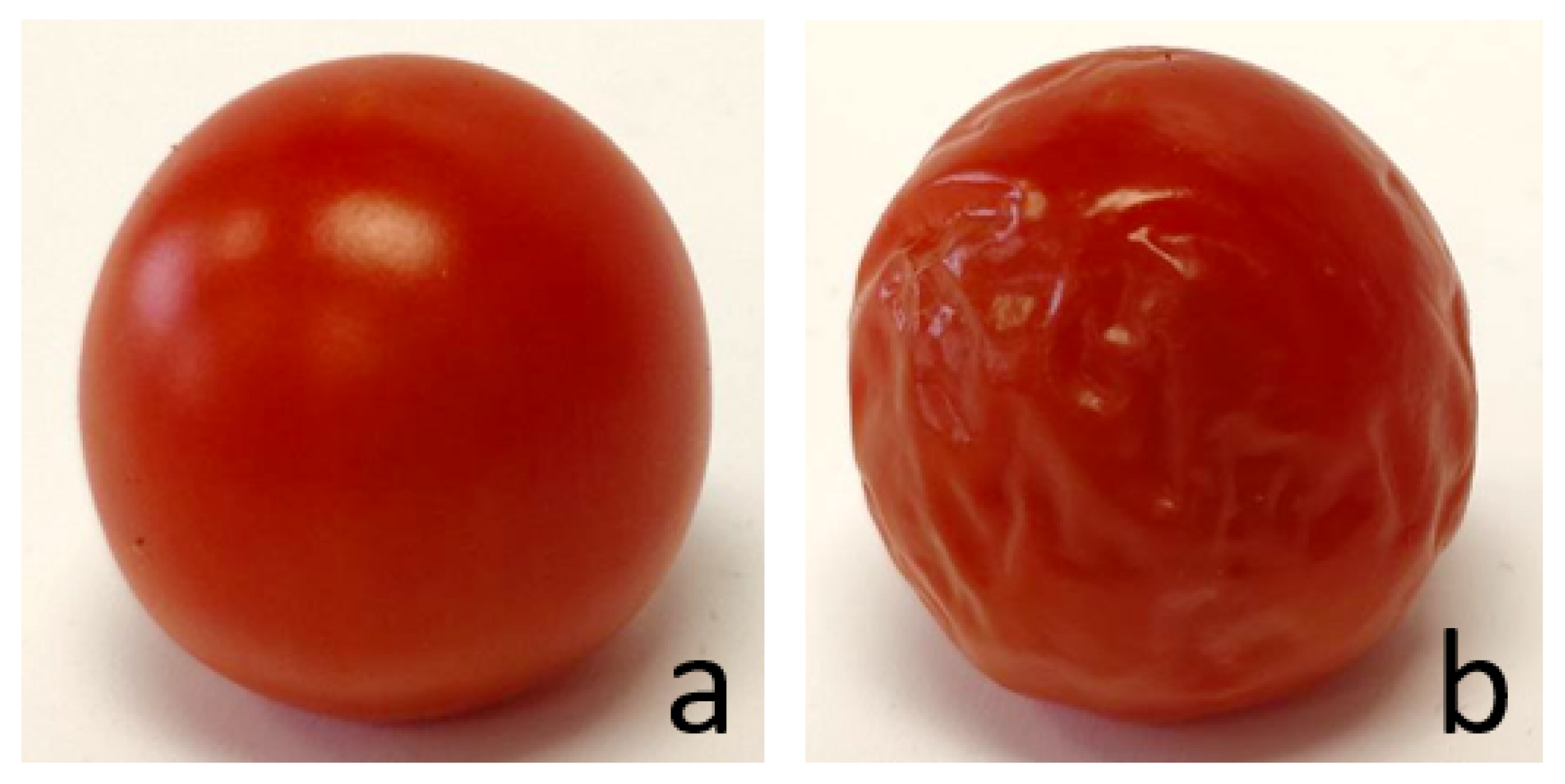
Figure 7 illustrates this internal damage, showing a comparison between a healthy and an internally bruised tomato one week after testing.
These results highlight the importance of using soft robotics for handling delicate produce, such as tomatoes, compared to traditional rigid robotics. Moreover, they underscore the need for optimizing the mechanical behavior of soft grippers for harvesting applications. It was observed that, for forces below 8 N, tomatoes can be effectively harvested using collapsible soft interfaces or Gyroid patterns. These adaptive structures distribute force more evenly, minimizing the severity of bruising, and ensuring safer handling of delicate agricultural products.
4. Discussion
This section analyzes the experimental results, highlighting key insights into the performance of the proposed soft grasping interfaces. The evaluation focuses on the interplay between grasping force, pull-off force, and fruit damage, aiming to determine the most effective interface design for minimizing bruising while ensuring a secure grasp. By integrating data from the pull-off and bruising tests, we establish an optimal operational range for grasping forces and assess the mechanical behavior of each interface. Furthermore, we contextualize these findings with previous studies on detachment forces and harvesting constraints, emphasizing the importance of adaptable and compliant designs in automated fruit-handling applications.
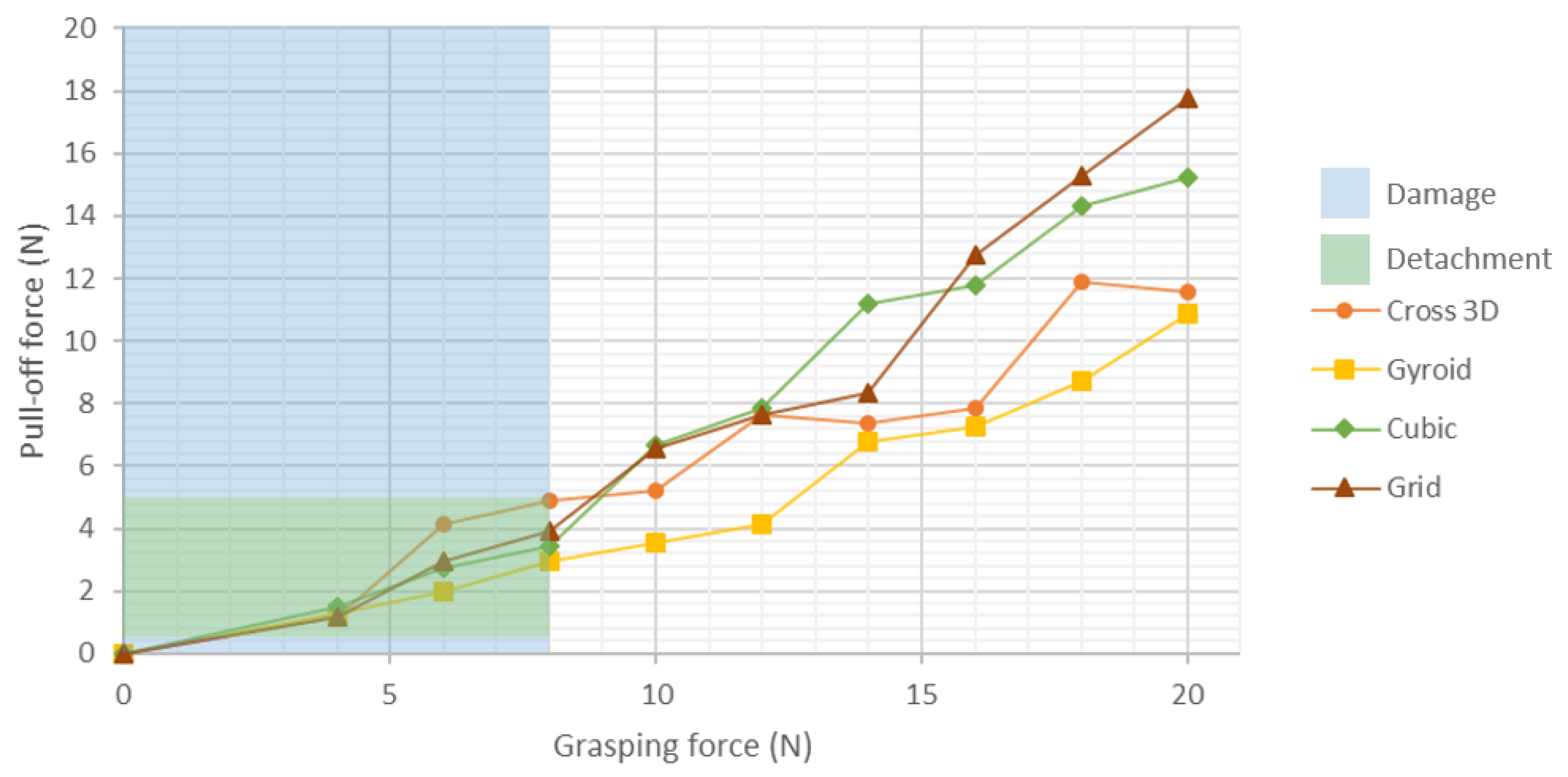
To synthesize the experimental findings,
Figure 8 illustrates how the collected data contributes to the final evaluation of soft interface performance in harvesting applications. Based on the pull-off test results in
Section 2.1, the recommended grasping force threshold was reduced from 20 N to 8 N, as the bruising test in
Section 3.2 demonstrated that exceeding this limit significantly increases the likelihood of severe bruising.
Furthermore, while previous studies have reported detachment forces ranging from 0.58 N to 2.46 N [
17], the upper limit was conservatively adjusted to 5 N based on additional laboratory observations. These distinct datasets define a specific operational range for both grasping force and pull-off force achievable by each interface. Among the tested designs, the Cross 3D pattern proved to be the most effective within this range, demonstrating that a collapsible interface is particularly suited for delicate handling. This pattern enables adaptation to the tomato’s shape while maintaining low grasping force levels, reducing mechanical stress on the fruit.
5. Conclusions
This study analyzed the mechanical behavior of soft interface designs for autonomous harvesting tasks, demonstrating the potential of soft robotics for handling delicate fruits such as tomatoes. The findings confirm that soft robotic grippers provide a viable alternative to traditional rigid manipulators, allowing for gentle fruit handling while minimizing mechanical damage. By systematically evaluating the performance of four different interface patterns, the study establishes quantitative insights into optimal grasping force thresholds and identifies collapsible structures as an effective strategy for reducing bruising.
These findings emphasize the importance of optimizing contact surfaces for soft robotic grippers in autonomous harvesting and pick-and-place operations. They also highlight the need for fruit-specific studies, ensuring that soft gripper designs adapt to the unique geometry and mechanical properties of each type of fruit, as well as to different harvesting techniques.
Future research should focus on further refining collapsible surface patterns, characterizing their mechanical properties, and developing new methodologies for achieving precise grasping force control. Additionally, future studies should explore other key parameters beyond the pattern itself, such as the choice of material, pattern size, fruit size and weight, and surface texture. Investigating how variations in wall thickness, unit size, and other geometric parameters within each infill pattern influence overall performance would provide a more comprehensive evaluation of structural adaptability and mechanical efficiency in soft gripper designs. Understanding how these factors interact with different fruits or vegetables is essential for optimizing soft gripper performance across a variety of agricultural applications. Furthermore, this approach should be extended to other delicate crops, such as strawberries, while considering their unique biomechanical properties and handling constraints. It should also be tested whether these results can be extended to other fruits or if new interfaces or materials need to be used for different crops. Another important research direction involves testing alternative manufacturing techniques, such as pneumatic inflatable fingers or over-molding silicone with internal cavities, to assess their impact on grasping performance.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}























































