
Key Technologies for Autonomous Fruit- and Vegetable-Picking Robots: A Review

Abstract
1. Introduction
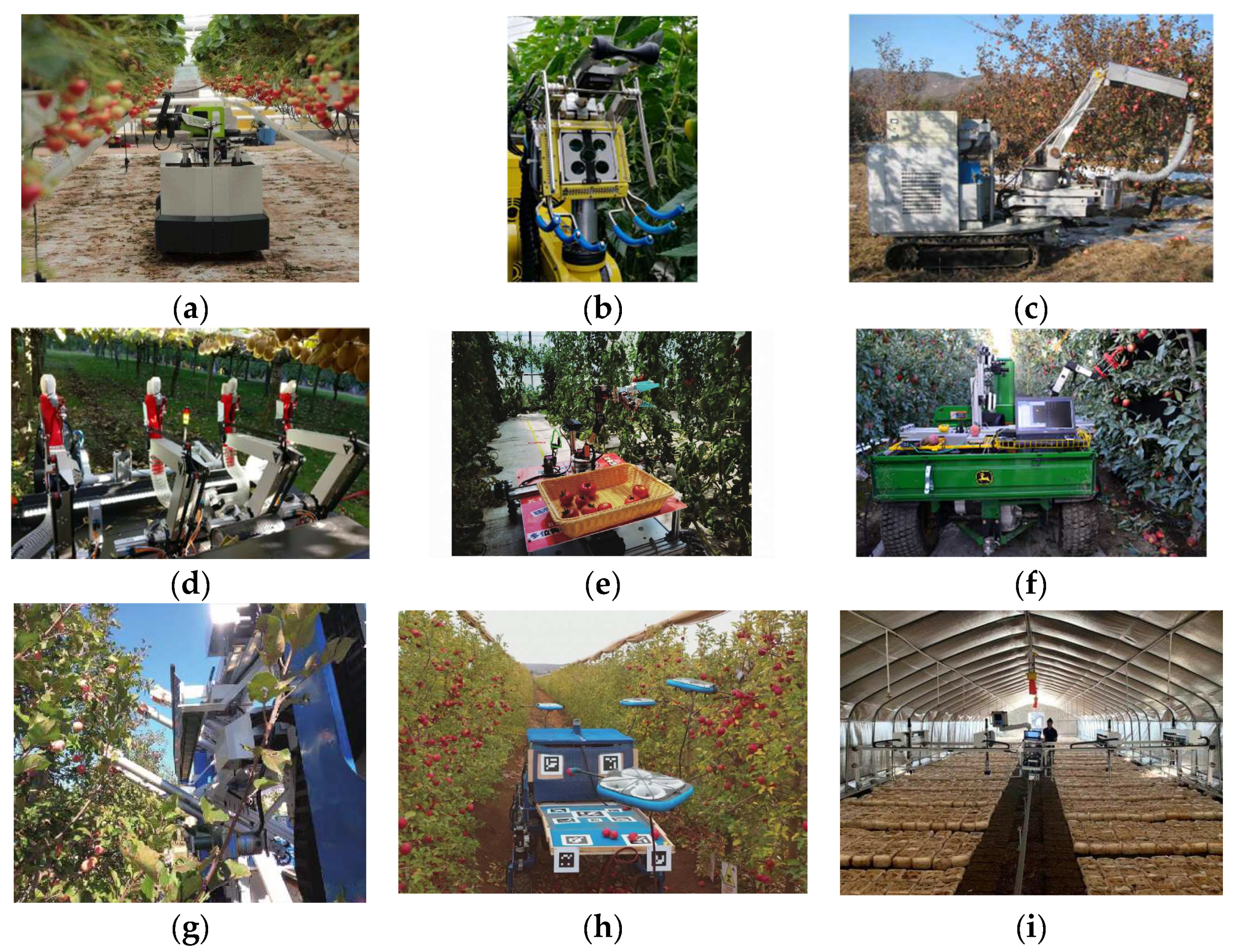
2. Research Progress of Fruit- and Vegetable-Picking Robots
3. Key Technology
3.1. Vision System
3.1.1. Sensors
3.1.2. Recognition Algorithm
- Traditional Imaging Processing
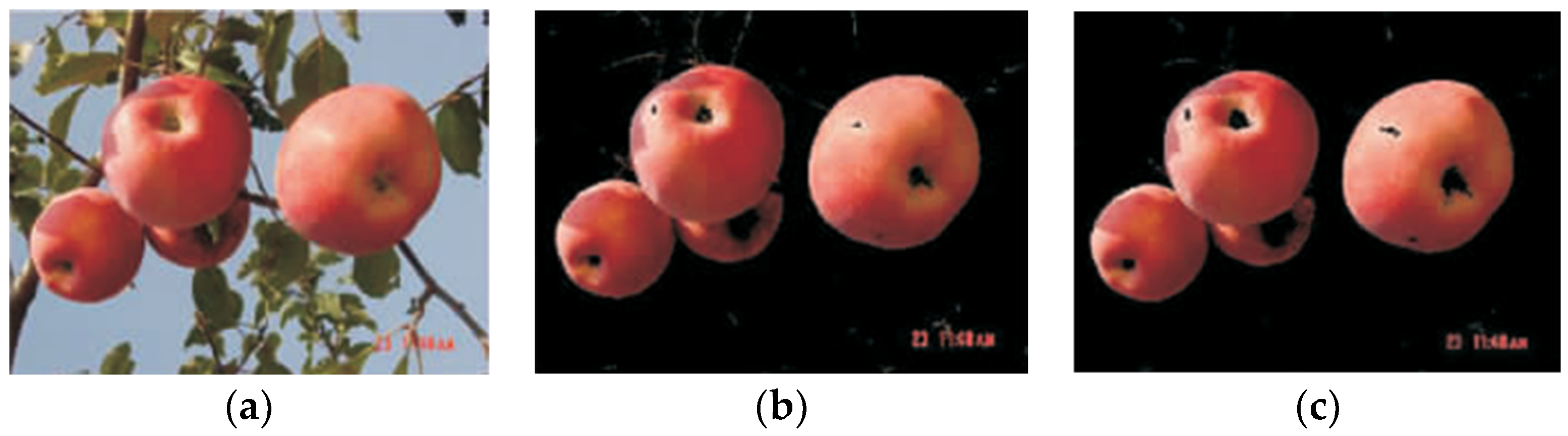
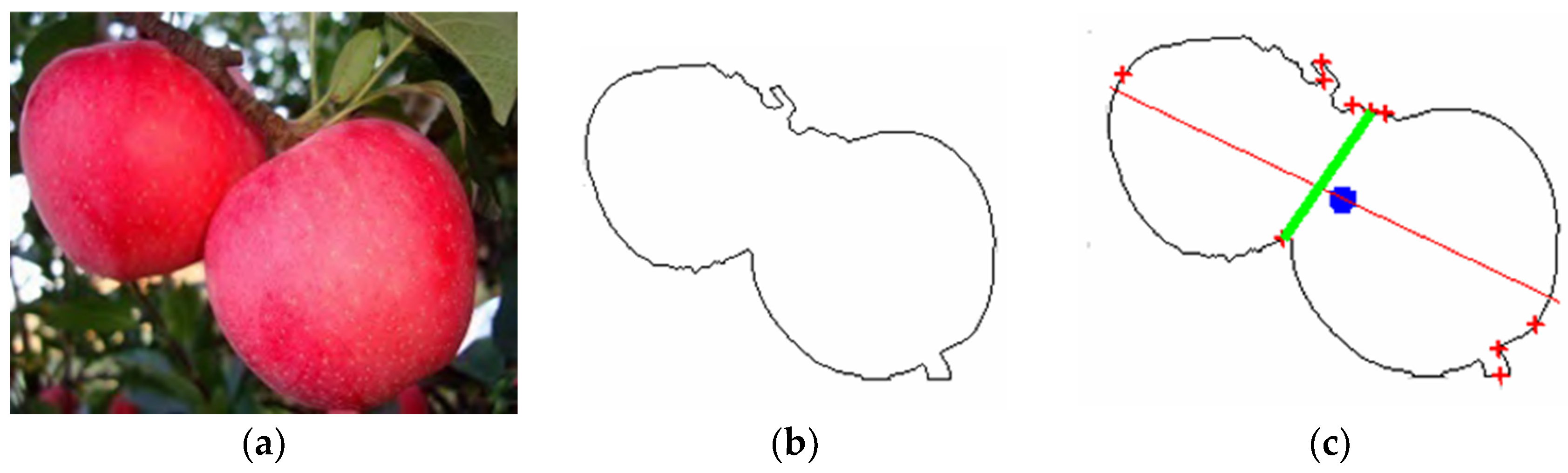
- Image segmentation
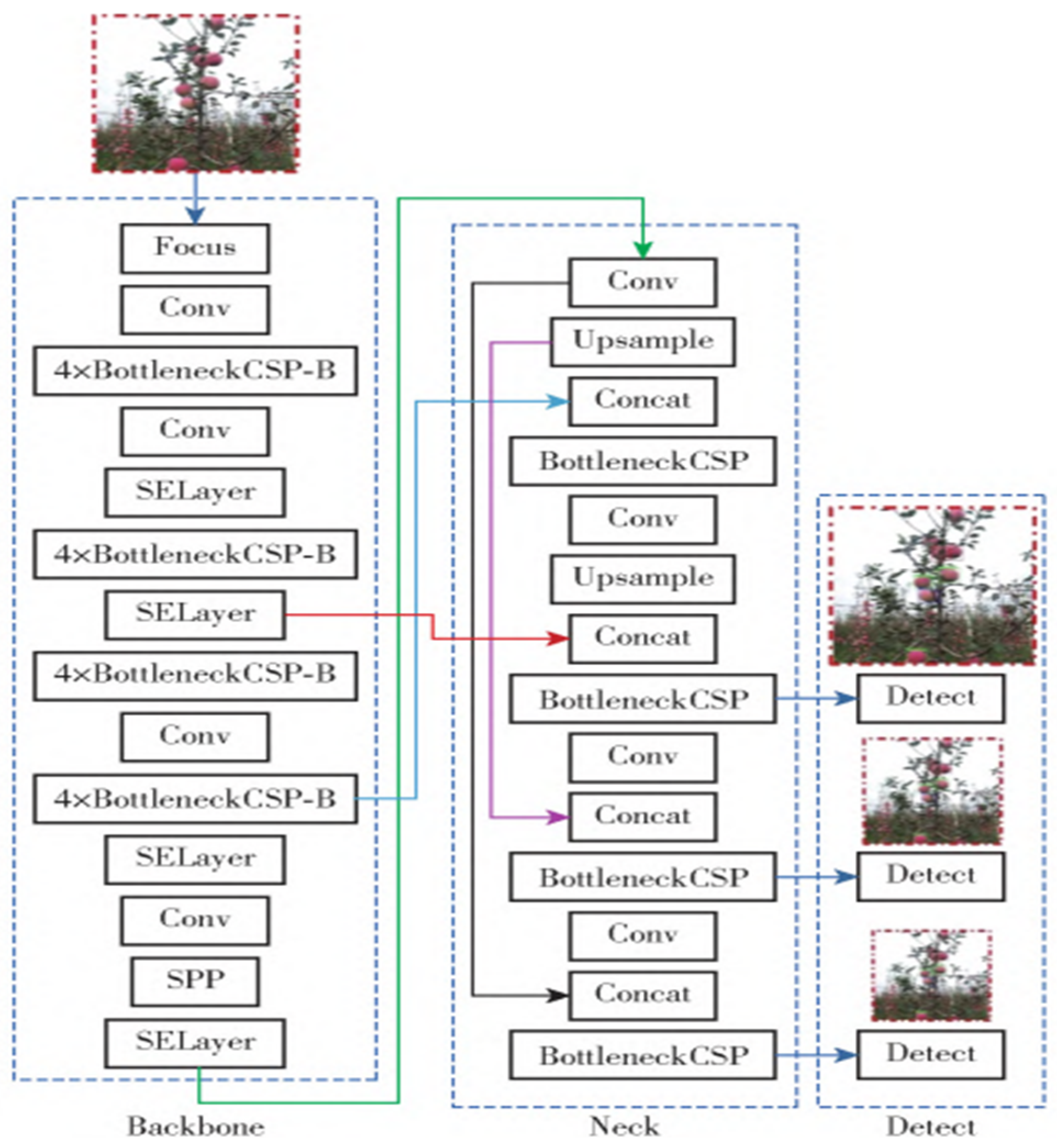
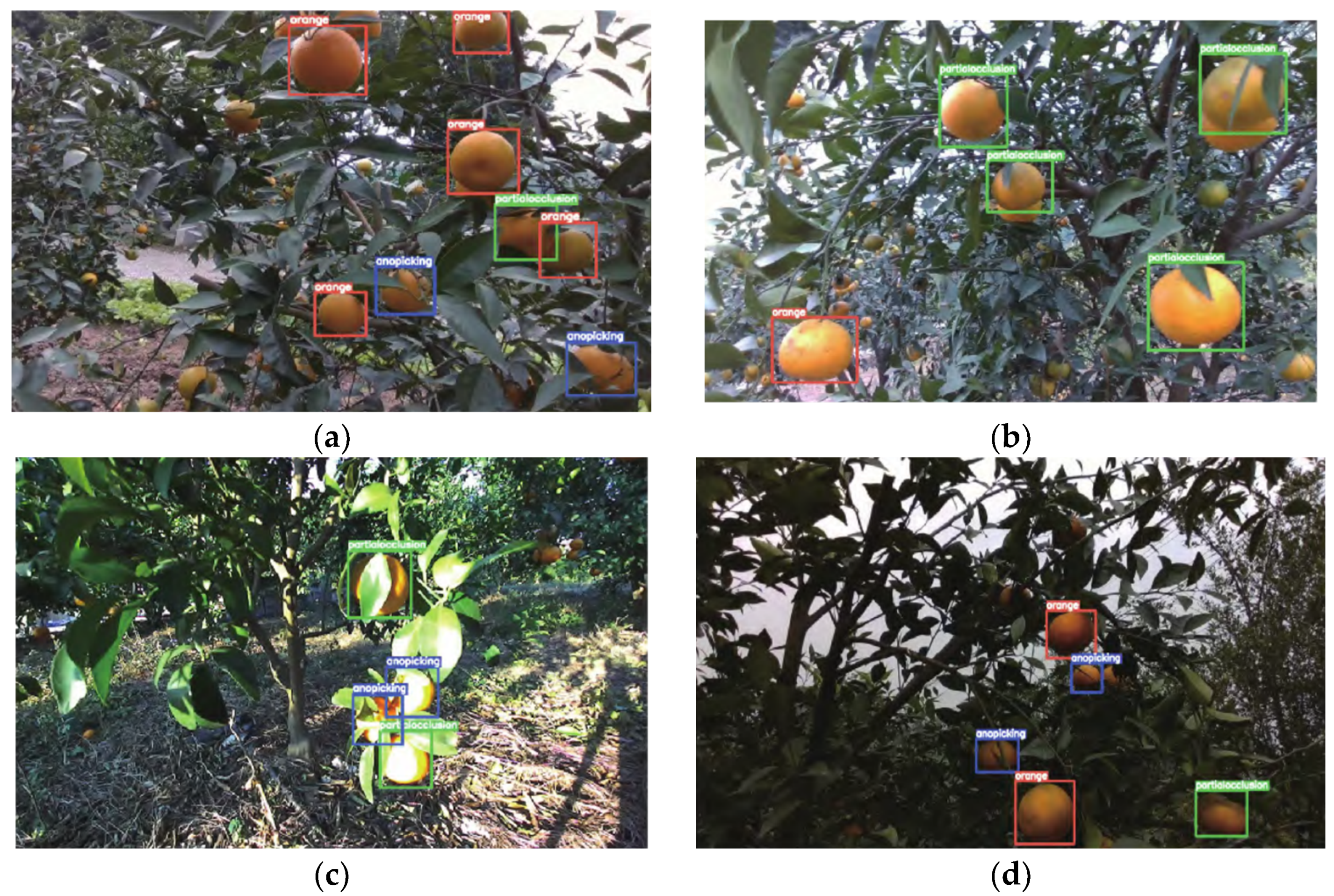
- Deep Learning
3.1.3. Targeting Algorithm
3.2. End-Effector Structure
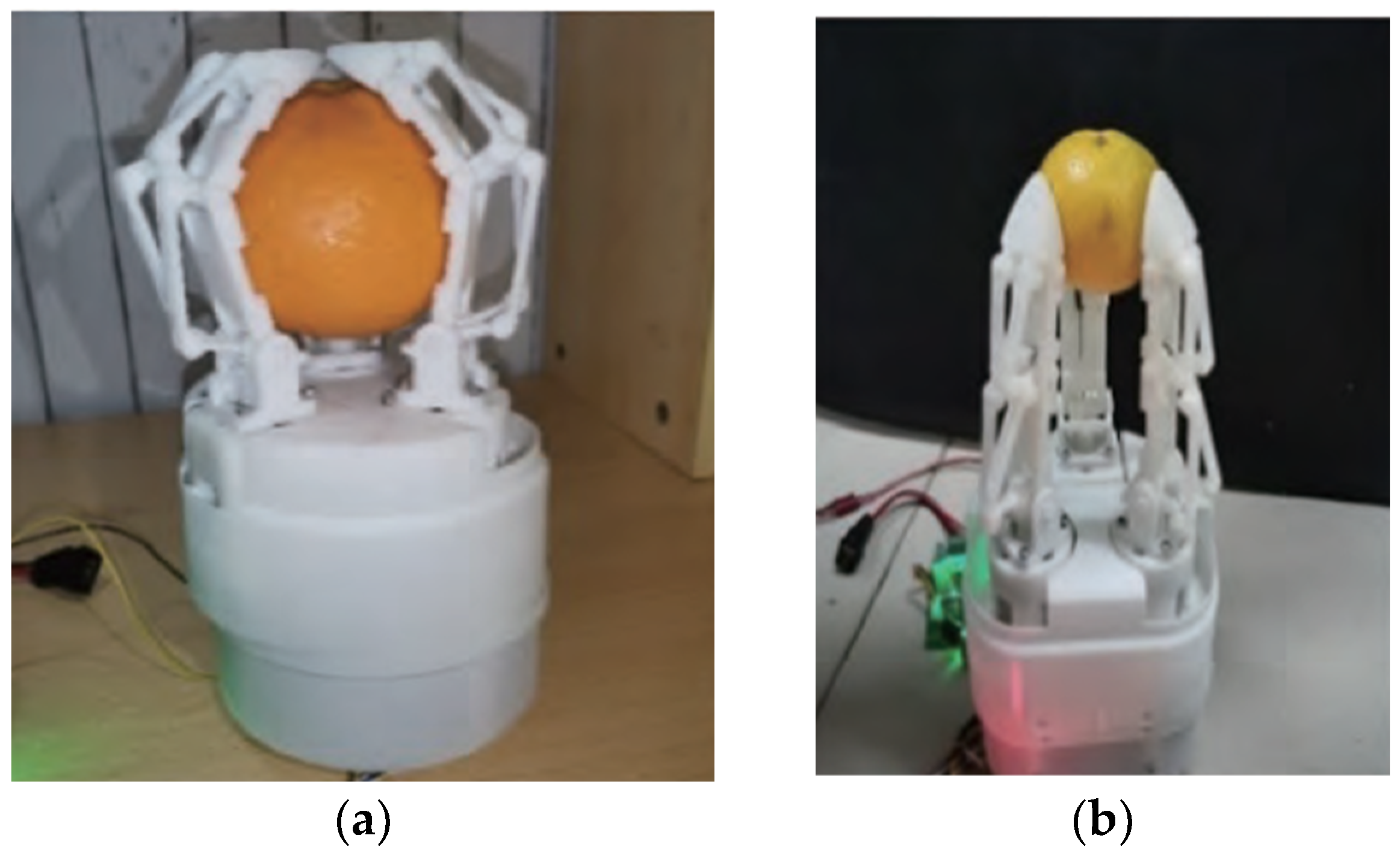
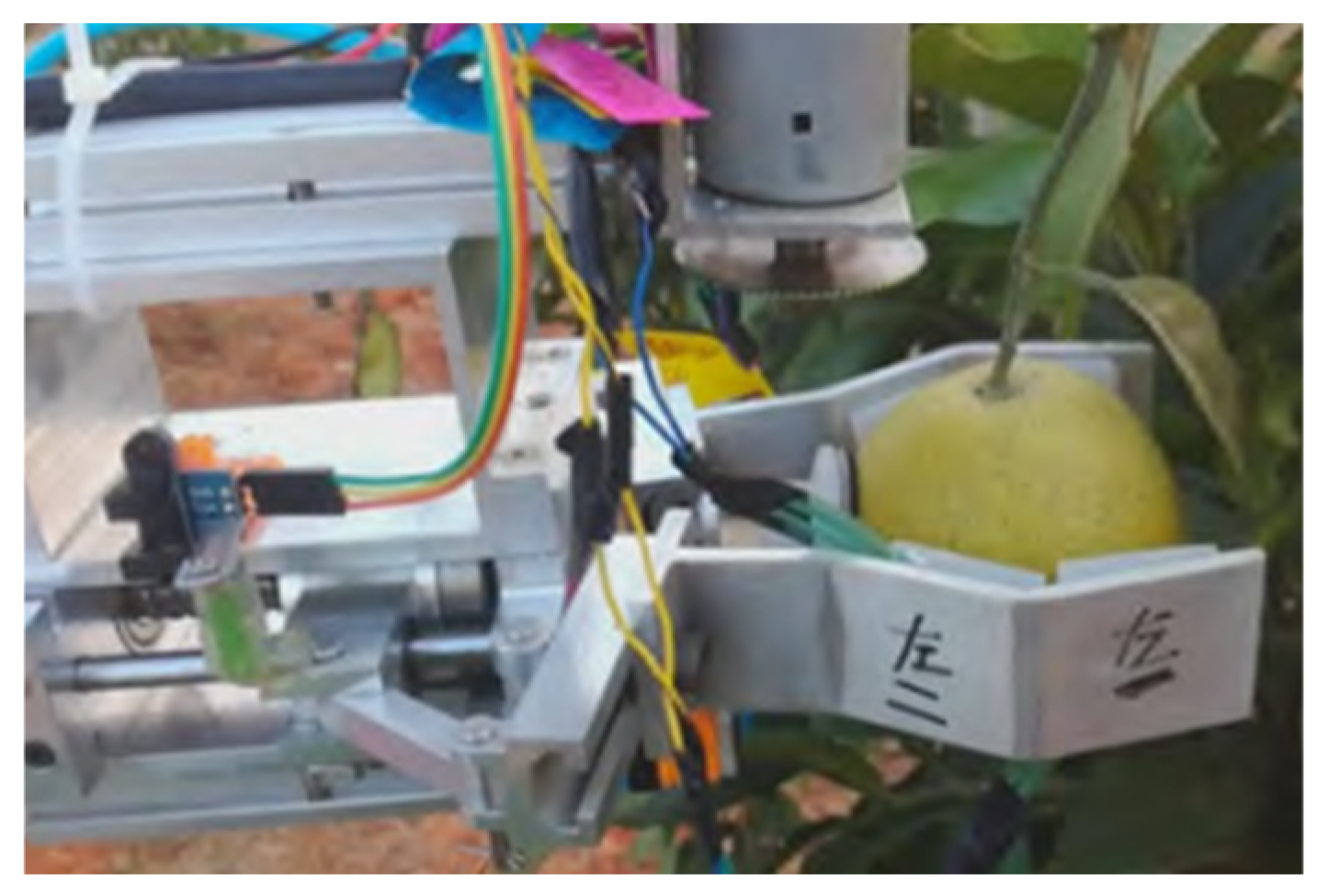
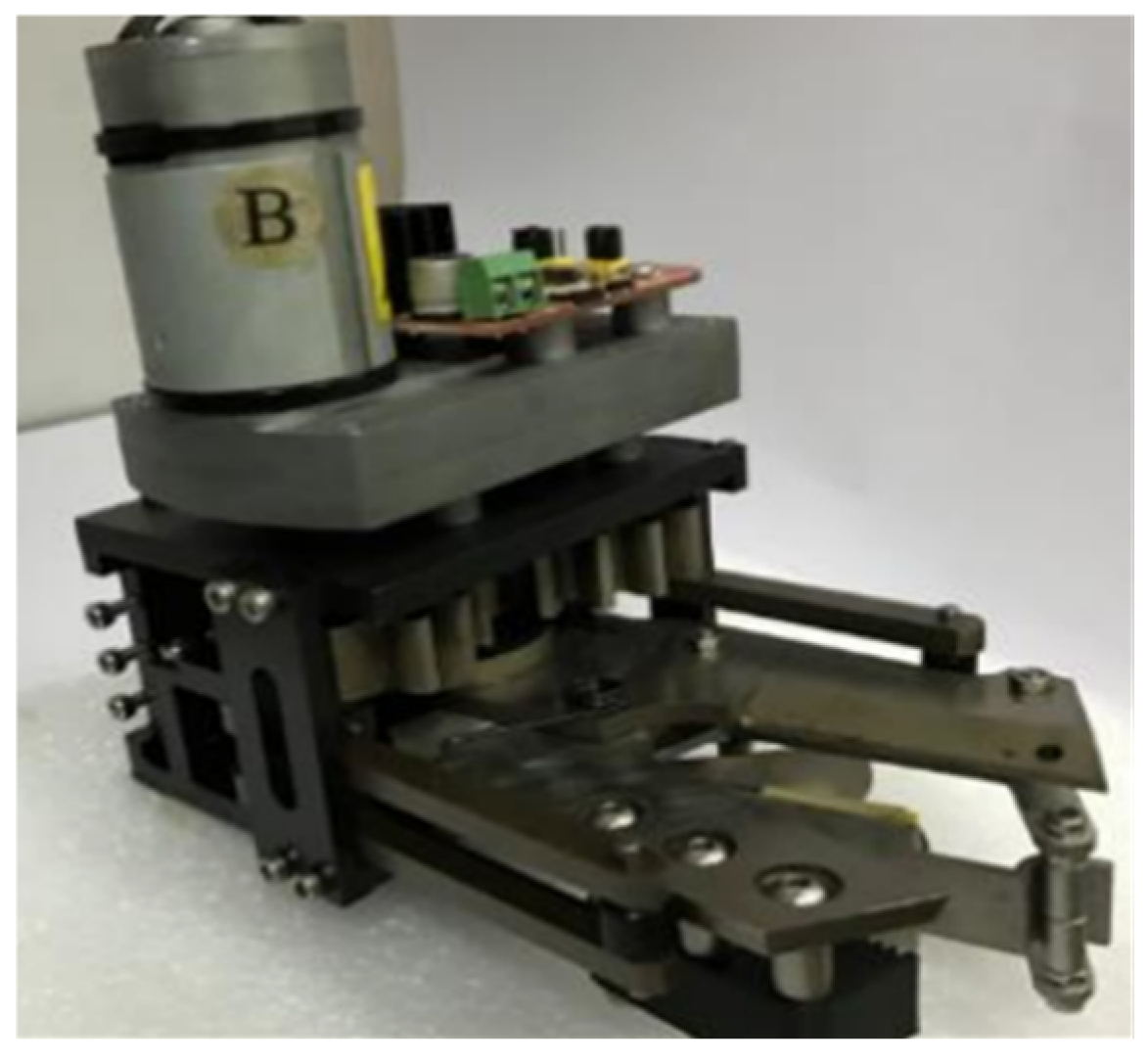
3.2.1. Clamping
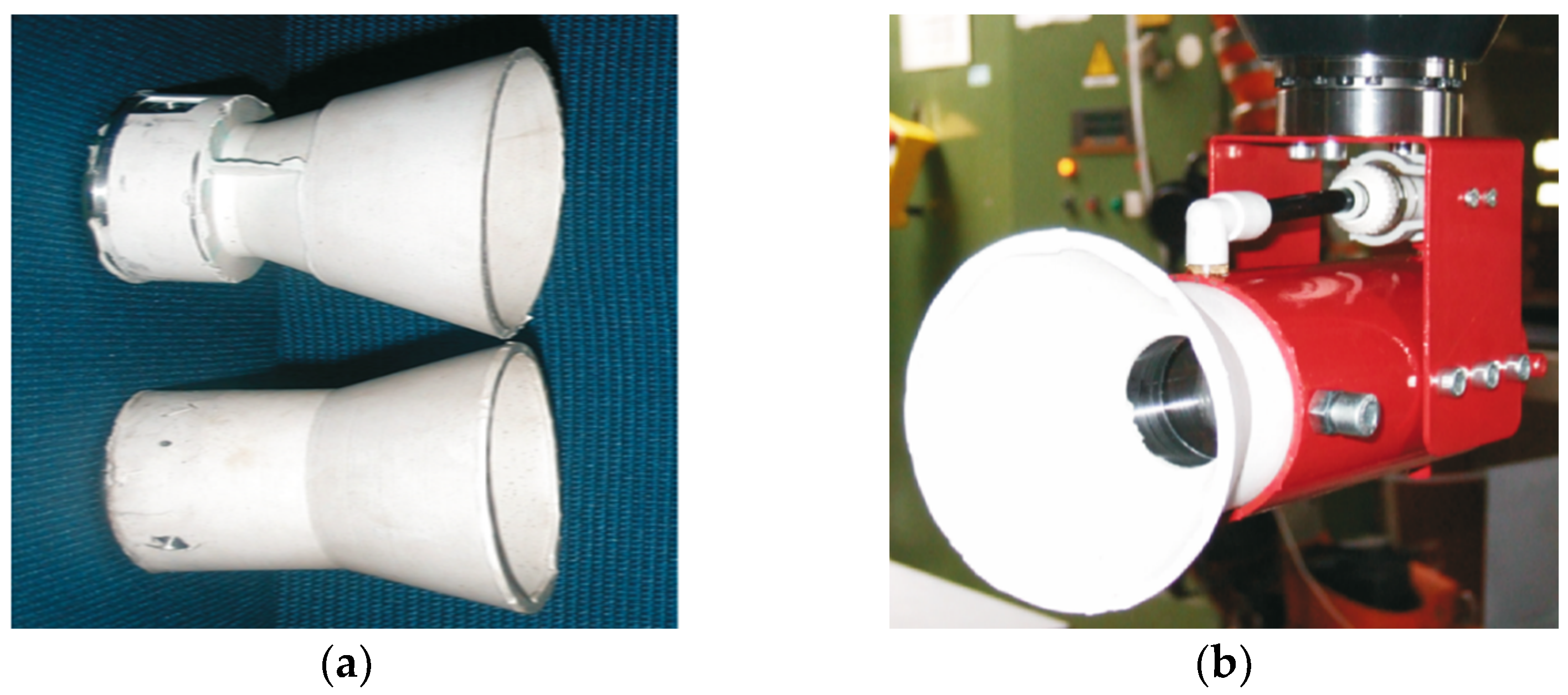
3.2.2. Suction
3.2.3. Blade Shear
4. Existing Deficiencies
4.1. Deficiencies in the Visual System
4.1.1. Low Recognition Rate
4.1.2. Poor Positioning Accuracy
4.2. Fruit Injury
4.3. Insufficient Efficiency and Speed
4.4. Costs and Maintenance
5. Future Prospects
5.1. Optimization of Recognition Algorithms
5.2. Farm Renovation
5.3. Cost Reduction
5.4. Environmental Adaptation and Functional Diversity
5.5. Innovation and Technology Integration
5.6. Proposal for Policy and Farm Management
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- National Bureau of Statistics (NBS). 2023. Available online: https://data.stats.gov.cn/easyquery.htm?cn=C01&zb=A0A0I&sj= (accessed on 20 August 2024).
- Duan, J.L.; Wang, Z.R.; Ye, L.; Yang, Z. Research progress and development trend of motion planning of fruit picking robot. J. Intell. Agric. Mech. 2021, 2, 7–17. [Google Scholar]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Yasukawa, S.; Li, B.; Sonoda, T. Development of a tomato harvesting robot. In Proceedings of the 2017 International Conference on Artificial Life and Robotics, Miyazaki, Japan, 19–22 January 2017; pp. 408–411. [Google Scholar]
- Takuya, F.; Shinsuke, Y.; Kazuo, I. System development of tomato harvesting robot based on modular design. In Proceedings of the 2019 International Workshop on Smart Info-Media Systems in Asia: SS1-1, Tokyo, Japan, 4–6 September 2019; The Institute of Electronics, Information and Communication Engineers: Tokyo, Japan, 2019. [Google Scholar]
- Andreas, D.P.; Jan, A.; Josse, D.B. Development of a Robot for Harvesting Strawberries. IFAC Pap. Online 2018, 51, 14–19. [Google Scholar]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Zhao, D.A.; Ji, W.; Chen, Y. Development and design of fruit tree picking robot. Tech. Appl. 2014, 5, 16–20. [Google Scholar]
- Zhao, D.A.; Lv, J.D.; JI, W. Development of fruit tree picking robot and control system. In Agricultural Engineering (CSAE), Proceedings of the 2011 Annual Academic Conference of the Chinese Society of Agricultural Engineering (CSAE), Changsha, China, 21–24 October 2011; School of Electrical Information and Engineering, Jiangsu University: Zhenjiang, China, 2011. [Google Scholar]
- Williams, H.A.M.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- Yu, F.H.; Zhou, C.Q.; Yang, X. Design and Experiment of Tomato Picking Robot in Solar Greenhouse. Trans. Chin. Soc. Agric. Mach. 2021, 53, 41–49. [Google Scholar]
- Arad, B.; Balendonck, J.; Barth, R.; Ben-Shahar, O.; Edan, Y.; Hellström, T.; Tuijl, B. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 128, 1–13. [Google Scholar] [CrossRef]
- Feng, C.C.; Zhao, C.J.; Li, T. Design and test of a four-arm apple picking robot system. Trans. Chin. Soc. Agric. Eng. 2023, 39, 25–33. [Google Scholar]
- Li, T.; Qiu, Q.; Zhao, C.J. Task planning of multi-arm harvesting robots for high-density dwarf orchards. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–10. [Google Scholar]
- Tevel Advanced Technologies Ltd. System and Method for Mapping and Building Database for Harvesting-Dilution Tasks Using Aerial Drones. U.S. Patent 20190166765, 6 June 2019. [Google Scholar]
- Rong, J.; Wang, P.; Yang, Q.; Huang, F. A Field-Tested Harvesting Robot for Oyster Mushroom in Greenhouse. Agronomy 2021, 11, 1210. [Google Scholar] [CrossRef]
- Zhou, J.; Liu, R.; Zhang, G.Y. Design of Fruit Harvesting Robot Based on Stereovision. Trans. Chin. Soc. Agric. Mach. 2010, 41, 158–162. [Google Scholar]
- Su, W.Z. Design of picking robot system based on visual interaction technology. J. Agric. Mech. Res. 2023, 45, 228–234. [Google Scholar]
- Jin, S.X.; Zhou, H.P.; Jing, H.Z. Research progress on visual system of picking robot. Jiangsu J. Agric. Sci. 2023, 39, 582–595. [Google Scholar]
- Bulanon, D.M.; Kataoka, T.; Okamoto, H. Development of a real-time machine vision system for the apple harvesting robot. In Proceedings of the Sice 2004 Conference, Sapporo, Japan, 4–6 August 2004; Volume 1, pp. 595–598. [Google Scholar]
- Zhao, D.A.; LV, J.D.; JI, W. Design and control of an apple harvesting robot. Biosyst. Eng. 2011, 110, 112–122. [Google Scholar]
- Kennedy, T. Optimal Thresholding for the Automatic Recognition of Apple Fruits. In Proceedings of the ASAE Annual, International Meeting 2001, Sacramento, CA, USA, 29 July–1 August 2001. [Google Scholar]
- Cui, P.; Chen, Z.; Zhang, X.C. Static Analysis and Simulation of Bionic Manipulator of Apple Picking Robot. Trans. Chin. Soc. Agric. Mach. 2011, 42, 149–153. [Google Scholar]
- Takahashi, T.; Zhang, S.; Fukuchi, H. Measurement of 3-D Locations of Fruit by Binocular Stereo Vision for Apple Harvesting in an Orchard. In 2002 ASAE Annual Meeting; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2002; Volume 16, pp. 653–659. [Google Scholar]
- Wang, H.; Mao, W.H.; Liu, G. Recognition and localization of apple working robots based on vision combination. Trans. Chin. Soc. Agric. Mach. 2012, 43, 165–170. [Google Scholar]
- Wei, H.L.; Li, H.Y. Design of intelligent picking robot based on deep binocular vision processing. J. Agric. Mech. Res. 2024, 46, 136–140. [Google Scholar]
- Yuan, T.; Li, W.; Tan, Y.Z. Information acquisition for cucumber picking robot in greenhouse environment. Trans. Chin. Soc. Agric. Mach. 2009, 40, 151–155. [Google Scholar]
- Song, J.; Wang, K.; Zhang, X. A Target Recognition and Ranging Method for Eggplant Picking Robot. Res. Explor. Lab. 2015, 34, 54–57. [Google Scholar]
- Hu, H.M.; Kaizu, Y.; Zhang, H.D. Recognition and localization of strawberries from 3D binocular cameras for a strawberry picking robot using coupled YOLO/Mask RCNN. Int. J. Agric. Biol. Eng. 2022, 15, 175–179. [Google Scholar]
- Xie, H.; Kong, D.; Shan, J.; Xu, F. Study the parametric effect of pulling pattern on cherry tomato harvesting using RSM-BBD techniques. Agriculture 2021, 11, 815. [Google Scholar] [CrossRef]
- Thorne, J. Apple-Picking Robots Gear up for US Debut in Washington State. 2023-11-28. Available online: https://www.geekwire.com/2019/apple-picking-robots-gear-u-s-debut-washington-state/ (accessed on 20 August 2024).
- Silwal, A.; Gongal, A.; Karkee, M. Apple identification in field environment with over the row machine vision system. Agric. Eng. Int. 2014, 16, 66–75. [Google Scholar]
- Kondo, N.; Yata, K.; Iida, M. Development of an end-effector for a tomato cluster harvesting robot. Eng. Agric. Environ. Food 2010, 3, 20–24. [Google Scholar] [CrossRef]
- Zhang, Q.; Pang, Y.H.; Li, B. An instance segmentation-based method for visual localization of tomato bunches and estimation of picking attitude. Trans. Chin. Soc. Agric. Mach. 2023, 54, 205–215. [Google Scholar]
- Liu, J.H.; He, J.H.; Chen, H.H. Tomato string detection model based on improved YOLOv4 and ICNet. Trans. Chin. Soc. Agric. Mach. 2023, 54, 216–254. [Google Scholar]
- Wang, L.Q.; Wang, X.Z.; Lin, W.G. Control system design of agricultural laser automatic picking and positioning robot: Based on PID control. J. Agric. Mech. Res. 2015, 37, 211–216. [Google Scholar]
- Zhang, B.; Su, J.X.; Zhang, W.W. Design of intelligent recognition apple picking robot based on laser vision. J. Agric. Mech. Res. 2016, 38, 60–64. [Google Scholar]
- Feng, J.; Liu, G.; Si, Y.S. Construction of laser vision system for apple harvesting robot. Trans. Chin. Soc. Agric. Eng. 2013, 29, 32–37. [Google Scholar]
- Qin, S.B.; Hu, M.J.; Chen, C.X. Picking Robot Based on Deep Learning of Raspberry Pie. Mod. Inf. Technol. 2023, 7, 154–158. [Google Scholar]
- Liang, Y.F. Research on the design of intelligent fruit picking robot system based on machine vision. China Equip. Eng. 2024, 11, 34–35. [Google Scholar]
- Yu, Y. Target Recognition and Localization Based on Monocular Vision. Master’s Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Menta, S.S.; Burks, T.F. Vision-based control of robotic manipulator for citrus harvesting. Comput. Electron. Agric. 2014, 102, 146–158. [Google Scholar]
- Vitzrabin, E.; Edan, Y. Changing task objectives for improved sweet pepper detection for robotic harvesting. Int. Conf. Robot. Autom. 2016, 1, 578–584. [Google Scholar] [CrossRef]
- Genemola, J.; Gregorio, E.; Guevara, J. Fruit detection in an apple orchard using a mobile terrestrial laser scanner. Biosyst. Eng. 2019, 187, 171–184. [Google Scholar] [CrossRef]
- Lu, H.Z.; Li, J.; Yang, Z.; Wu, M.C.; Qiu, J.H. Ultrasonic Target Detection Orchard Thinning Machine. China Patent CN102217493B, 22 August 2012. [Google Scholar]
- Yoshida, T.; Oshida, T.; Fukao, T.; Hasegawa, T. Cutting point detection using a robot with point clouds for tomato harvesting. J. Robot. Mechatron. 2020, 32, 437–444. [Google Scholar] [CrossRef]
- Lv, J.D.; Zhao, D.A.; Ji, W. Fast tracking and identification method of target fruit for apple picking robots. Trans. Chin. Soc. Agric. Mach. 2014, 45, 65–72. [Google Scholar]
- Lv, X.L.; Lv, X.R.; Lu, B.F. Identification Methods of Picking Tomatoes Based on Color Information. Comput. Eng. 2010, 36, 178–179. [Google Scholar]
- Tokuda, M.; Namikawa, K. Discernment of watermelon fruits using image processing. J. Jpn. Soc. Agric. Mach. 1996, 57, 13–20. [Google Scholar]
- Meng, Y.H.; Wang, J.Q.; Tian, E.L. Research on navigation of agricultural UAV based on single chip microcomputer control. J. Agric. Mech. Res. 2020, 42, 245–248. [Google Scholar]
- Li, E.C.; Li, Z.M.; Liu, W.R. Image Segmentation of Cucumber Fruit Based on Color and Texture Features. Opt. Technol. 2009, 35, 529–531. [Google Scholar]
- Rakun, J.; Stajnko, D.; Zazula, D. Original papers: Detecting fruits in natural scenes by using spatial-frequency based texture analysis and multiview geometry. Comput. Electron. Agric. 2011, 76, 80–88. [Google Scholar] [CrossRef]
- Chaivivatrakul, S.; Dailey, M.N. Texture-based fruit detection. Precis. Agric. 2014, 15, 662–668. [Google Scholar] [CrossRef]
- Fu, L.H.; Duan, J.L.; Zou, X.J. Banana detection based on color and texture features in the natural environment. Comput. Electron. Agric. 2019, 167, 1–12. [Google Scholar] [CrossRef]
- Wang, X.K.; Li, K. Research on operation optimization of picking robot based on computer vision. J. Agric. Mech. Res. 2024, 46, 235–239. [Google Scholar]
- Han, H.; Yao, L.; Wan, Y. Fiber image segmentation based on K-means and GVF Snake model. J. Donghua Univ. Nat. Sci. Ed. 2011, 37, 66–71. [Google Scholar]
- Chinchuluun, R.; Lee, W.S. Machine vision-based citrus yield mapping system. Proc. Fla. State Hortic. Soc. 2006, 119, 142–147. [Google Scholar]
- Jiang, G.Q.; Zhao, C.J. Apple recognition based on machine vision. In Proceedings of the International Conference on Machine Learning and Cybernetics, Xi’an, China, 15–17 July 2012; pp. 1148–1151. [Google Scholar]
- Lv, J.D.; Zhao, D.A.; Ji, W. Recognition of apple fruit in natural environment. Opt. Int. J. Light Electron Opt. 2016, 127, 1354–1362. [Google Scholar]
- Xu, Y.; Li, Y.H.; Song, H.B. Segmentation method of overlapped double apples based on Snake model and corner detectors. Trans. Chin. Soc. Agric. Eng. 2015, 31, 196–203. [Google Scholar]
- Gongal, A.; Silwal, A.; Amatya, S. Apple crop–load estimation with over-the-row machine vision system. Comput. Electron. Agric. 2016, 120, 26–35. [Google Scholar] [CrossRef]
- Ji, W.; Zhao, D.; Cheng, F. Automatic recognition vision system guided for apple harvesting robot. Comput. Electr. Eng. 2012, 38, 1186–1195. [Google Scholar] [CrossRef]
- Liao, W.; Zheng, L.L.; Li, M.Z. Identification of Green Apples under Natural Lighting Conditions Based on the Random Forest Algorithm. J. Agric. Mach. 2017, 48, 86–91. [Google Scholar]
- Lv, Q.; Cai, J.R.; Liu, B. Identification of fruit and branch in natural scenes for citrus harvesting robot using machine vision and support vector machine. Int. J. Agric. Biol. Eng. 2014, 7, 115–121. [Google Scholar]
- Zhang, J.Y.; Cao, C.M.; Li, W.B. Study on the method of recognition of fresh leaf grade of tea based on multi-feature fusion. J. Anhui Agric. Univ. 2021, 48, 480–487. [Google Scholar]
- Tao, Y.T.; Zhou, J. Automatic apple recognition based on the fusion of color and 3D feature for robotic fruit picking. Comput. Electron. Agric. 2017, 142, 388–396. [Google Scholar] [CrossRef]
- Wachs, J.P.; Stern, H.I.; Burks, T. Apple detection in natural tree canopies from multimodal images. In Proceedings of the 7th European Conference on Precision Agriculture, Wageningen, The Netherlands, 6–8 July 2009; Volume 68, pp. 293–302. [Google Scholar]
- Niu, L.L.; Zhou, W.C.; Wang, D.D. Extracting the symmetry axes of partially occluded single apples in natural scene using convex hull theory and shape context algorithm. Multimed. Tools Appl. 2016, 76, 1–15. [Google Scholar] [CrossRef]
- Hu, C.L.; Zhao, D.A.; Zhao, Y.Y. Research on Overlapping Apple Recognition Method Based on Extreme Values. J. Agric. Mech. Res. 2016, 38, 42–46. [Google Scholar]
- Liu, C.M. Research on machine learning based on picking robot control system. J. Agric. Mech. Res. 2024, 46, 253–263. [Google Scholar]
- Fan, Y.Y.; Zhang, Z.M.; Chen, G.P. Application of visual sensor in target fruit recognition system of picking robot. J. Agric. Mech. Res. 2019, 41, 210–214. [Google Scholar]
- Zhou, H.Y.; Liu, Y.; Lu, W.B. Intelligent Picking-robot based on Deep Leaning. For. Mach. Woodwork. Equip. 2024, 52, 55–59. [Google Scholar]
- Yang, Y. Research on fruit tree picking recognition based on deep learning. In Proceedings of the Optoelectronic Imaging and Multimedia Technology X, Xiamen, China, 2–4 June 2023. [Google Scholar]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Du, Y.H.; Dong, C.Q.; Zhao, D. Application of improved Faster RCNN model in the identification of heterosexual fibers in cotton. Laser Optoelectron. Prog. 2020, 57, 132–141. [Google Scholar]
- Peng, H.X.; Huang, B.; Shao, Y.Y.; Li, Z.S.; Zhang, C.W.; Chen, Y.; Xiong, J.T. General improved SSD model for picking object recognition of multiple fruits in natural environment. Trans. Chin. Soc. Agric. Eng. 2018, 34, 155–162. [Google Scholar]
- Tian, Y.N.; Yang, G.D.; Wang, Z.H. Apple detection during different growth stages in orchards using the improved YOLO-V3 model. Comput. Electron. Agric. 2019, 157, 417–426. [Google Scholar] [CrossRef]
- Wan, S.H.; Goudos, S. Faster R-CNN for multi-class fruit detection using a robotic vision system. Comput. Netw. 2020, 168, 107036. [Google Scholar] [CrossRef]
- Kuznetsova, A.; Maleva, T.; Soloviev, V. Using YOLOv3 Algorithm with Pre and Post-Processing for Apple Detection in Fruit-Harvesting Robo. Agronomy 2020, 10, 1016. [Google Scholar] [CrossRef]
- Miao, R.H.; Li, G.A.; Huang, Z.B. Apple ripeness detection method in complex orchard environments based on YOLO v7-ST-ASFF. Trans. Chin. Soc. Agric. Mach. 2024, 55, 219–228. [Google Scholar]
- Yan, B.; Fan, P.; Wang, M.R. Real-time recognition of apple picking mode of picking robot based on improved YOLOv5m. Trans. Chin. Soc. Agric. Mach. 2022, 53, 28–35. [Google Scholar]
- Li, L.; Liang, J.Y.; Zhang, Y.F. Accurate detection and localization method of citrus target in complex environment based on improved YOLOv5. Trans. Chin. Soc. Agric. Mach. 2024, 7, 1–10. [Google Scholar]
- Li, Y.J.; YI, S.L.; Zhu, X.T. Improvement of object detection algorithm Yolov8 for fruit detection of veraison citrus. South China Fruits 2024, 53, 281–287. [Google Scholar]
- Du, X.X. Research on Object Recognition of Visual System of Apple Picking Robot. Master’s Thesis, Shaanxi University of Technology, Shaanxi, China, 2019. [Google Scholar]
- Rahnemoonfar, M.; Shepperd, C. Deep count: Fruit counting based on deep simulated learning. Sensors 2017, 17, 905. [Google Scholar] [CrossRef]
- Li, N.; Chen, N. Research on Visual System of Apple Picking Robot in Nature Scene. Comput. Technol. Dev. 2018, 28, 137–141. [Google Scholar]
- Baeten, J.; Donné, K.; Boedrij, S.; Beckers, W.; Claesen, E. Autonomous fruit picking machine: A robotic apple harvester. In Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2007; Volume 42, pp. 531–539. [Google Scholar]
- Wang, L.; Xu, W.; Du, K.W. In-situ measurement technology of brown mushroom based on SR300 depth camera. Trans. Chin. Soc. Agric. Mach. 2018, 49, 13–16. [Google Scholar]
- Kong, F.D. Multi-Objective Recognition and Three-Dimensional Reconstruction of Apple Picking Environment. Master’s Thesis, Yanshan University, Hebei, China, 2019. [Google Scholar]
- Xiao, C.; Zheng, L.; Li, M. Apple detection from apple tree image based on BP neural network and Hough transform. Int. J. Agric. Biol. Eng. 2015, 8, 46–53. [Google Scholar]
- Tian, Y.Y. Target Recognition Algorithm for Apple Picking Robot in Complex Environment. Master’s Thesis, Shandong Normal University, Jinan, China, 2020. [Google Scholar]
- Lv, J.D.; Zhao, D.A.; Ji, W. Fast positioning method of apple harvesting robot for oscillating fruit. Trans. Chin. Soc. Agric. Eng. 2012, 28, 48–53. [Google Scholar]
- Tanigaki, K.; Fuijiur, T.; Akase, A. Cherry harvesting robot. Comput. Electron. Agric. 2008, 63, 65–72. [Google Scholar] [CrossRef]
- Hu, H.R.; Zhang, Y.Y.; Zhou, J.L. Research status and analysis of end-effector of fruit and vegetable picking robot. J. Chin. Agric. Mech. 2024, 45, 231–236. [Google Scholar]
- Dimeas, F.; Sako, D.V.; Moulianitis, V.C. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotic 2015, 33, 1085–1098. [Google Scholar] [CrossRef]
- Wei, B.; He, J.Y.; Shi, Y. Design and testing of underdriven citrus picking end-effector. Trans. Chin. Soc. Agric. Mach. 2021, 52, 120–128. [Google Scholar]
- Bulanon, D.M.; Kataoka, T. Fruit detection system and an end effector for robotic harvesting of Fuji apples. CIGR J. Agric. Eng. Int. 2010, 12, 203–210. [Google Scholar]
- Xu, L.M.; Liu, X.D.; Zhang, K.L.; Xing, J.J.; Yuan, Q.C.; Chen, J.W. Design and test of end-effector for navel orange picking robot. Trans. Chin. Soc. Agric. Eng. 2018, 34, 53–61. [Google Scholar]
- Baeten, J.; Donne, K.; Boedrij, S.; Beckers, W. Autonomous fruit picking machine: A robotic apple harvester. In Proceedings of the 6th International Conference on Field and Service Robotics, Chamonix, France, 9–12 July 2008. [Google Scholar]
- Liu, J.Z.; Li, P.P.; Li, Z.G. Hardware design of end effector of tomato picking robot. Trans. Chin. Soc. Agric. Mach. 2008, 39, 109–112. [Google Scholar]
- Liu, S.Y. Design and Research of Brown Mushroom Picking Robot at the End of the Sucking Terminal. Master’s Thesis, Nanjing Agricultural University, Jiangsu, China, 2021. [Google Scholar]
- Xu, W.; Zhao, C.G.; Zhang, J.Y. Design and optimization of shear apple picking manipulator. For. Mach. Woodwork. Equip. 2023, 51, 19–23. [Google Scholar]
- Lv, H.; Li, L.J.; Zhao, Q. Design and experiment of shear Camellia oleifera picking end effector. J. Agric. Mech. Res. 2024, 46, 134–139. [Google Scholar]
- Zhang, Y.Y.; Tian, J.Q.; Wang, W.X. Design and experiments of end-effector for dragon fruit picking robot. J. For. Eng. 2023, 8, 144–150. [Google Scholar]
- Chen, Y.; Jiang, Z.L.; Li, J.W. Design and Testing of Litchi Picking End-effector Integrated Clamping and Cutting Performance. Trans. Chin. Soc. Agric. Mach. 2018, 49, 35–41. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Nation | Species | Camera | Degrees of Freedom | End-Effector | Success Rate |
|---|---|---|---|---|---|---|
| 2014 | China [8,9] | Apple | Color camera | 5 | 2-Finger Clamping | 77% |
| 2017 | Belgium [6] | Strawberrie | RGB + 3D camera | 5 | Two-finger grip | — |
| 2017 | USA [7] | Apple | CCD + RGB-D | 7 | Three-finger twist | 84% |
| 2019 | USA [10] | Kiwi | Four pairs of color camera cameras | 4 | Clamping type | 51% |
| 2022 | China [11] | Tomato | Raspberry Pi 4B Camera | 6 | Flexible 3-Finger Clamping | — |
| 2020 | Britain [12] | Sweet pepper | RGB-D | 6 | Vibrating Blade + Clamping | 61% |
| 2021 | China [16] | Mushroom | Depth camera | 3 | Pneumatic suction-held | 86.8% |
| 2023 | China [13,14] | Apple | RGB-D | 3 | Three-Finger Grip Screw | 82% |
| Sensors | Dominance | Detection Distance | Defective | Positioning Accuracy/% |
|---|---|---|---|---|
| Monocular vision camera [41] | Simple structure, low cost, relatively simple image processing algorithms | 400–1500 mm | Unable to directly determine the true size of the object, occlusion of the object will lead to loss of information, recognition accuracy is not high | 81–91 |
| Stereo visual matching [42] | Ability to provide rich depth and position information with high calibration accuracy | 300–1500 mm | Susceptible to the influence of the target surface reflection requires a large amount of computational resources, complex algorithms, high hardware costs | 83–95 |
| RGB-D depth camera [43] | Small size, high integration, better performance in scenes with low light or lack of texture, high depth measurement accuracy, wide range of applications | 400–1000 mm | High power consumption, low resolution, limited by depth of field and glare, high data processing requirements | 86–94 |
| Laser rangefinders [44] | High accuracy of distance measurement, fast ranging response, long distance, strong adaptability | 1000–1500 mm | Affected by the foliage or tree branches blocking the impact of easy signal interference, the distance is too long, easily leads to out-of-focus results | 87–90 |
| Recognition Algorithm | Advantages | Disadvantages | Accuracy/% |
|---|---|---|---|
| Based on color [46,47,48] | Can significantly distinguish fruit objects. | Significantly affected by lighting. | 80–85 |
| Based on shape [49,50] | Can acquire the contour information of fruit objects. | Clearly influenced by branch and leaf occlusion and fruit size. | 80–87 |
| Based on texture [51,52,53] | Can separate fruit and background information well. | Clearly influenced by environmental factors such as lighting and branch and leaf occlusion. | 75–90 |
| Image Segmentation | Advantages | Disadvantages | Accuracy/% |
|---|---|---|---|
| Bayesian classifier algorithm [57] | Performs well on small-scale datasets and has a fast response time. | Significantly affected by the training set, and not well-suited for environments with strong lighting conditions. | 81 |
| SVM algorithm [62,63] | High accuracy, performs well in classifying data outside the training set, and has simple computations. | SVM is sensitive to noisy data and outliers, and has a longer training time. | 90–93 |
| KNN clustering algorithm [65] | High accuracy and insensitive to outliers. | Sensitive to irrelevant features, its effectiveness depends on the chosen distance metric, and it is computationally intensive and slow. | 90 |
| K-means clustering algorithm [56] | Short processing time, quick response, good clustering results, and capable of separating fruits from the background. | Sensitive to outlier data and requires the pre-setting of the K value. | 90 |
| Random Forest [63] | High accuracy, strong resistance to overfitting, robustness. | Slow prediction speed, high computational and overhead costs. | 96 |
| Deep Learning | Advantages | Disadvantages | Accuracy/% |
|---|---|---|---|
| Residual Neural Network [75,85] | Increase the depth of the network while reducing the number of network parameters. | Training data may be overfitted; high complexity. | 85–87 |
| Mask R-CNN [74] | High recognition accuracy. | Complex to implement, limited real-time performance, and high computational cost. | 89 |
| SSD [76] | High recognition accuracy, strong generalization and robustness, and very fast detection speed. | Lower accuracy for small objects and poor performance in dense scenes. | 90 |
| YOLO [79,80] | Fast recognition speed and relatively high accuracy. | Complex training, lower accuracy for small object detection, and less robustness to object scale variations. | 89–95 |
| Kind | Outlined | Characteristic |
|---|---|---|
| Clamping [95,96,97,98] | The jaws close slowly to grip the fruit with appropriate force and separate the fruit by rotating or pulling with the gripper. | Consisting of two or more jaws, the jaws are usually made of flexible material in order to avoid damaging the fruit; this structure is designed to adapt to different types of fruit and has the widest range of applications. |
| Suction [99,100,101] | Negative pressure is generated by the air drive to suck the fruit; the process needs to be knotted, using shear or rotating and other mechanical auxiliary action. | The suction cups are usually made of flexible material, which reduces physical damage to the surface of the fruit, and the suction and release action is quick, which can significantly improve the picking efficiency. |
| Shear [102,103,104,105] | The cutting head is aimed at the stalk and cuts the stalk by means of a fast-closing electric or pneumatic drive system, usually equipped with a gripper to prevent the fruit from falling. | Simple design of the shearing mechanism, wide range of applications, able to maintain the integrity of the fruit. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Lei, X.; Yuan, Q.; Qi, Y.; Ma, Z.; Qian, S.; Lyu, X. Key Technologies for Autonomous Fruit- and Vegetable-Picking Robots: A Review. Agronomy 2024, 14, 2233. https://doi.org/10.3390/agronomy14102233
Chen Z, Lei X, Yuan Q, Qi Y, Ma Z, Qian S, Lyu X. Key Technologies for Autonomous Fruit- and Vegetable-Picking Robots: A Review. Agronomy. 2024; 14(10):2233. https://doi.org/10.3390/agronomy14102233
Chicago/Turabian StyleChen, Zhiqiang, Xiaohui Lei, Quanchun Yuan, Yannan Qi, Zhengbao Ma, Shicheng Qian, and Xiaolan Lyu. 2024. "Key Technologies for Autonomous Fruit- and Vegetable-Picking Robots: A Review" Agronomy 14, no. 10: 2233. https://doi.org/10.3390/agronomy14102233
APA StyleChen, Z., Lei, X., Yuan, Q., Qi, Y., Ma, Z., Qian, S., & Lyu, X. (2024). Key Technologies for Autonomous Fruit- and Vegetable-Picking Robots: A Review. Agronomy, 14(10), 2233. https://doi.org/10.3390/agronomy14102233