
Design and Spray Performance Evaluation of an Air–Ground Cooperation Stereoscopic Plant Protection System for Mango Orchards


 ,
,  and
and 
Abstract
:1. Introduction
2. Material and Methods
2.1. Design of ACSPPS
- (1)
- Single-machine operation: When the tree is in the early growth stage, the canopy with a small canopy volume and low leaf density and BBCH is 0–31 (pome fruit for example) [28], or the pests or diseases are in the early stages of outbreak, one spray unit can meet the current plant protection needs of fruit trees; the application operation can be carried out using a mist sprayer or UAV alone. This mode is suitable for standard orchards such as standard apples orchard or vineyards.
- (2)
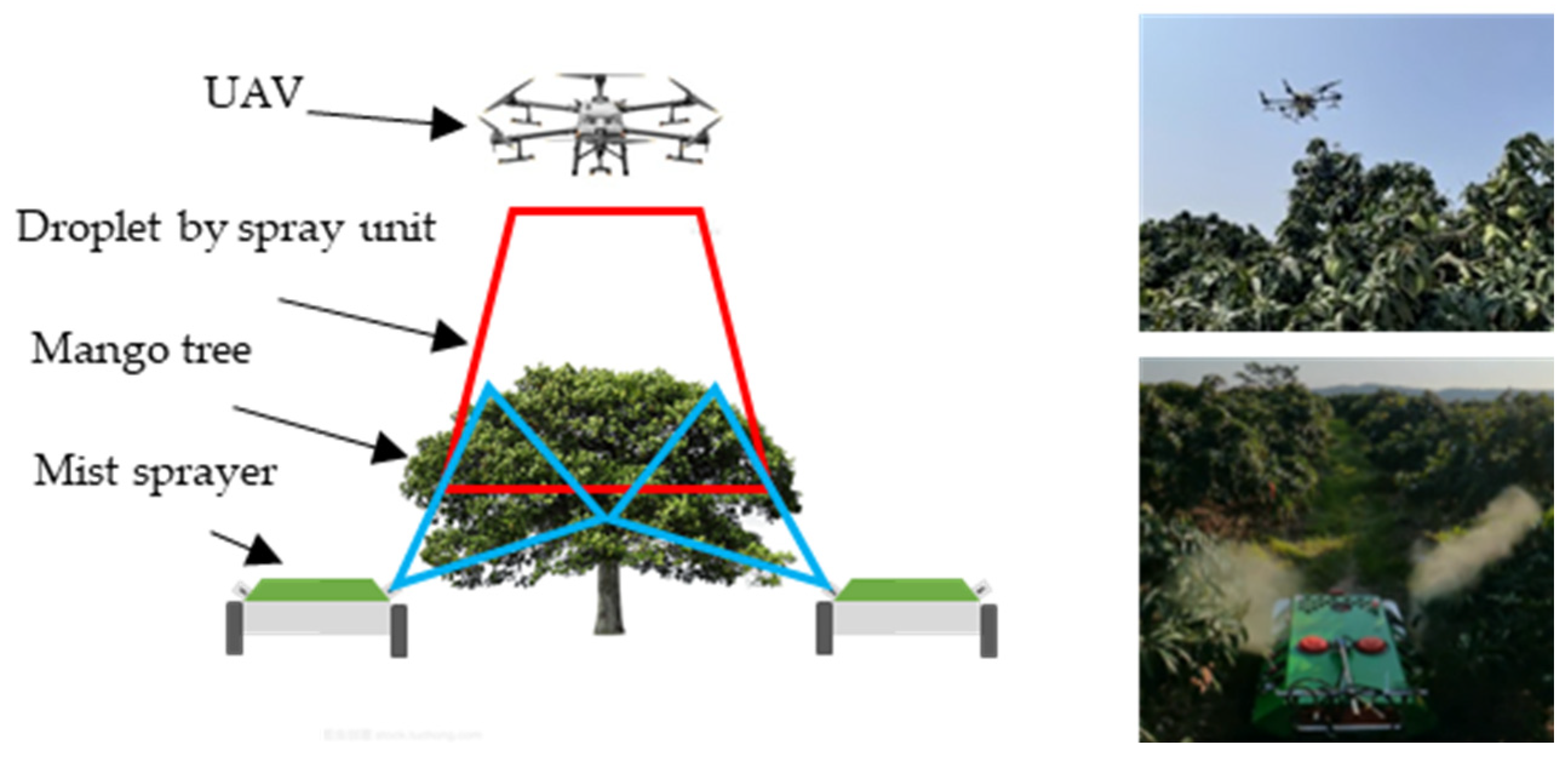
- Co-operative operation using two machines: The crop phenological stage is at full development at BBCH 32–91 [28]. It is difficult to achieve uniform deposition of pesticides in the canopy via one-machine operation, when the occurrence of pests and diseases is at its peak, or when pesticides need high coverage such as a protective fungicide (e.g., Bordeaux solution, which is shared by two machines, and both apply to trees) (Figure 1). The movement track cannot spray two trees at the same time. This mode is suitable for a fruit tree canopy with large volume and high canopy density and standardized planting mode, such as olive, mango, grapefruit, and apricot, etc. At the same time, this mode has the potential to reduce the usage of pesticides on the basis of achieving spatially uniform distribution of pesticide.
- (3)
- Dual-machine hybrid operation: In the complex terrain orchard application operation, ground sprayers and UAVs operate in accordance with the preset route, and the ground implements cannot pass the specified place to wait for the end of the collaborative operation in the UAV to make up the application. At the same time, this mode can avoid the antagonistic effect of pesticide mixing, which can separate the configuration of pesticides to avoid chemical reactions between pesticides, such as insecticide spraying via drone and fungicide spraying using a mist sprayer. Different pesticide dosage forms can also be separated for spraying.
2.2. Spray Test Site
2.3. Experimental Design
2.4. Droplet Site Measurement
2.5. Data Analyses
3. Result
3.1. Droplet-Size Spectrum
3.2. Characteristics of Deposition Distribution in The Mango Canopy
3.2.1. Spray Coverage and Deposit Density
3.2.2. Spray Deposition and Penetration

3.3. Vertical Direction Droplet Deposition Distribution Index
4. Discussion
- (1)
- In this study, only the droplet deposition analysis of the ACSPPS system was conducted under large spray volume conditions, which is not conducive to improving effective pesticide utilization.
- (2)
- The field control efficiency of ACSPPS was not tested. The ACSPPS’s strategies for reducing pesticide use have not been developed.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jahurul, M.; Zaidul, I.; Ghafoor, K.; Al-Juhaimi, F.Y.; Nyam, K.-L.; Norulaini, N.; Sahena, F.; Omar, A.M. Mango (Mangifera indica L.) by-products and their valuable components: A review. Food Chem. 2015, 183, 173–180. [Google Scholar] [CrossRef] [PubMed]
- Galán Saúco, V. Trends in world mango production and marketing. In Proceedings of the XI International Mango Symposium 1183, Darwin, Australia, 28 September–2 October 2015; pp. 351–364. [Google Scholar]
- Pena, J.; Mohyuddin, A.; Wysoki, M. A review of the pest management situation in mango agroecosystems. Phytoparasitica 1998, 26, 129–148. [Google Scholar] [CrossRef]
- Ploetz, R. Diseases of mango. In Diseases of Tropical Fruit Crops; CABI Books: Wallingford, UK, 2003; pp. 327–363. [Google Scholar]
- Rocha, F.H.; Infante, F.; Quilantán, J.; Goldarazena, A.; Funderburk, J.E. ‘Ataulfo’Mango Flowers Contain a Diversity of Thrips (Thysanoptera). Fla. Entomol. 2012, 95, 171–178. [Google Scholar] [CrossRef]
- Venkata Rami Reddy, P.; Gundappa, B.; Chakravarthy, A. Pests of mango. In Pests and Their Management; Springer: Berlin/Heidelberg, Germany, 2018; pp. 415–440. [Google Scholar]
- Xiongkui, H.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- Gil, E.; Salcedo, R.; Soler, A.; Ortega, P.; Llop, J.; Campos, J.; Oliva, J. Relative efficiencies of experimental and conventional foliar sprayers and assessment of optimal LWA spray volumes in trellised wine grapes. Pest Manag. Sci. 2021, 77, 2462–2476. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, H.; Zhang, H.; Xu, Y.; Xu, M.; Jiang, X.; Zhang, H.; Jia, Z. Development and experiment of automatic target spray control system used in orchard sprayer. Trans. Chin. Soc. Agric. Eng. 2014, 30, 1–9. [Google Scholar]
- Cross, J.; Walklate, P.; Murray, R.; Richardson, G. Spray deposits and losses in different sized apple trees from an axial fan orchard sprayer: 3. Effects of air volumetric flow rate. Crop Prot. 2003, 22, 381–394. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Rodríguez-Lizana, A.; Gil, E.; Agüera-Vega, J.; Gil-Ribes, J.A. Influence of liquid-volume and airflow rates on spray application quality and homogeneity in super-intensive olive tree canopies. Sci. Total Environ. 2015, 537, 250–259. [Google Scholar] [CrossRef] [PubMed]
- Shuran, S.; Jianze, C.; Tiansheng, H.; Cheng, Z.; Qiufang, D.; Xiuyun, X. Design and experiment of orchard flexible targeted spray device. Trans. Chin. Soc. Agric. Eng. 2015, 31, 57–63. [Google Scholar]
- Yan, C.; Xu, L.; Yuan, Q.; Ma, S.; Niu, C.; Zhao, S. Design and experiments of vineyard variable spraying control system based on binocular vision. Trans. CSAE 2021, 37, 13–22. [Google Scholar]
- Li, L.; He, X.; Song, J.; Wang, X.; Jia, X.; Liu, C. Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate. Trans. Chin. Soc. Agric. Eng. 2017, 33, 70–76. [Google Scholar]
- Richardson, B.; Rolando, C.A.; Somchit, C.; Dunker, C.; Strand, T.M.; Kimberley, M.O. Swath pattern analysis from a multi-rotor unmanned aerial vehicle configured for pesticide application. Pest Manag. Sci. 2020, 76, 1282–1290. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2020, 21, 226–243. [Google Scholar] [CrossRef]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Li, X.; Giles, D.K.; Andaloro, J.T.; Long, R.; Lang, E.B.; Watson, L.J.; Qandah, I. Comparison of UAV and fixed-wing aerial application for alfalfa insect pest control: Evaluating efficacy, residues, and spray quality. Pest Manag. Sci. 2021, 77, 4980–4992. [Google Scholar] [CrossRef] [PubMed]
- Yao, W.; Guo, S.; Wang, J.; Chen, C.; Yu, F.; Li, X.; Xu, T.; Lan, Y. Droplet deposition and pest control efficacy on pine trees from aerial application. Pest Manag. Sci. 2022, 78, 3324–3336. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Liu, Y.; Zhang, Z.; Han, L.; Li, Y.; Zhang, H.; Wongsuk, S.; Li, Y.; Wu, X.; He, X. Spray performance evaluation of a six-rotor unmanned aerial vehicle sprayer for pesticide application using an orchard operation mode in apple orchards. Pest Manag. Sci. 2022, 78, 2449–2466. [Google Scholar] [CrossRef]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 146181. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, C.; Li, Y.; Zhang, H.; Zeng, A.; He, X. Field evaluation of spray drift and nontargeted soybean injury from unmanned aerial spraying system herbicide application under acceptable operation conditions. Pest Manag. Sci. 2023, 79, 1140–1153. [Google Scholar] [CrossRef]
- Li, X.; Giles, D.K.; Niederholzer, F.J.; Andaloro, J.T.; Lang, E.B.; Watson, L.J. Evaluation of an unmanned aerial vehicle as a new method of pesticide application for almond crop protection. Pest Manag. Sci. 2021, 77, 527–537. [Google Scholar] [CrossRef]
- Pan, Z.; Lie, D.; Qiang, L.; Shaolan, H.; Shilai, Y.; Yande, L.; Yongxu, Y.; Haiyang, P. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45–52. [Google Scholar]
- Liu, Y.; Li, L.; Liu, Y.; He, X.; Song, J.; Zeng, A.; Wang, Z. Assessment of spray deposition and losses in an apple orchard with an unmanned agricultural aircraft system in China. Trans. ASABE 2020, 63, 619–627. [Google Scholar] [CrossRef]
- Zhang, R.; Chen, L.; Li, L.; Zhang, L.; Tang, Q.; Li, X. An Air-Ground Synergistic Application Method and System. CN Patent 112965514A, 15 June 2021. [Google Scholar]
- Jiang, S.; Chen, B.; Li, W.; Yang, S.; Zheng, Y.; Liu, X. Stereoscopic plant-protection system integrating UAVs and autonomous ground sprayers for orchards. Front. Plant Sci. 2022, 13, 1040808. [Google Scholar] [CrossRef] [PubMed]
- Meier, U.; Graf, H.; Hack, H.; Hess, M.; Kennel, W.; Klose, R.; Mappes, D.; Seipp, D.; Stauss, R.; Streif, J.; et al. Phänologische Entwicklungsstadien des Kernobstes (Malus domestica Borkh. und Pyrus communis L.), des Steinobstes (Prunus-Arten), der Johannisbeere (Ribes-Arten) und der Erdbeere (Fragaria × ananassa Duch.). Nachrichtenbl. Deut. Pflanzenschutzd. 1994, 46, 141–153. [Google Scholar]
- Agustí, M.; Zaragoza, S.; Bleiholder, H.; Buhr, L.; Hack, H.; Klose, R.; Staub, R. Escala BBCH para la descripción de los estadios fenológicos del desarrollo de los agrios (Gén. Citrus). Levante Agrícola 1995, 332, 189–199. [Google Scholar]
- ISO 25358:2018; Crop Protection Equipment—Droplet-Size Spectra from Atomizers—Measurement and Classification. ISO: Geneva, Switzerland, 2018.
- Miranda-Fuentes, A.; Rodríguez-Lizana, A.; Cuenca, A.; González-Sánchez, E.; Blanco-Roldán, G.; Gil-Ribes, J. Improving plant protection product applications in traditional and intensive olive orchards through the development of new prototype air-assisted sprayers. Crop Prot. 2017, 94, 44–58. [Google Scholar] [CrossRef]
- Ebert, T.A.; Taylor, R.A.J.; Downer, R.A.; Hall, F.R. Deposit structure and efficacy of pesticide application. 1: Interactions between deposit size, toxicant concentration and deposit number. Pestic. Sci. 1999, 55, 783–792. [Google Scholar] [CrossRef]
- Ebert, T.A.; Taylor, R.A.J.; Downer, R.A.; Hall, F.R. Deposit structure and efficacy of pesticide application. 2: Trichoplusia ni control on cabbage with fipronil. Pestic. Sci. 1999, 55, 793–798. [Google Scholar] [CrossRef]
- Uk, S. Tracing insecticide spray droplets by sizes on natural surfaces. The state of the art and its value. Pestic. Sci. 1977, 8, 501–509. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sprayer | Overall Size/mm × mm × mm | Maximum Payload/L | Nozzle Type × Number of Nozzles | Device Maximum Flow/(L/min) | Maximum Operating Speed/(m/s) | Spray Swath Width /m |
|---|---|---|---|---|---|---|
| UAV | 2858 × 2685 × 790 | 30 | TEEJET 11002VS × 16 | 9.0 | 7.0 | 9.0 |
| Mist sprayer | 1935 × 1140 × 690 | 200 | XR45/01S × 4 XR95/02S × 2 | 16.0 | 1.25 | 8.0 |
| Treatment | Application Volume/(L/ha) | Tartrazine Concentration/(g/L) | Velocity/(m/s) | UAV Flight Height/(m) | Spray Route/Track |
|---|---|---|---|---|---|
| UAV | 120 | 4.20 | 2.5 | 3 | Top of the tree row |
| Mist sprayer | 510 | 0.40 | 1.25 | / | Spraying between tree rows |
| ACSPPS | UAV: 120 Mist sprayer: 510 | UAV: 4.20 Mist sprayer: 0.40 | UAV: 2.5 Mist sprayer: 1.25 | 3 | / |
| Treatment | Wind Speed/(m/s) | Wind Direction/° | Temperature/(°C) | Humidity/(%) |
|---|---|---|---|---|
| UAV | 0.6 | 156.8 | 31.6 | 46.5 |
| Mist sprayer | 0.8 | 203.7 | 28.4 | 50.8 |
| ACSPPS | 0.5 | 180.2 | 30.1 | 60.2 |
| Nozzle | Device | DV10 (μm) | DV50 (μm) | DV90 (μm) | RS | V75 (%) | V100 (%) | V150 (%) |
|---|---|---|---|---|---|---|---|---|
| SX11002VS | UAV | 63.01 | 139.02 | 289.74 | 1.63 | 10.94 | 25.98 | 60.17 |
| XR45/01S | Mist Sprayer | 36.34 | 61.23 | 80.66 | 0.72 | 63.75 | 97.37 | 100.00 |
| XR95/02S | Mist Sprayer | 38.66 | 64.00 | 81.82 | 0.67 | 59.14 | 96.51 | 100.00 |
| Treatment | Sample Position | Coverage/% | Deposit Density/cm2 | HSC/% | ||
|---|---|---|---|---|---|---|
| Upperside | Underside | Upperside | Underside | |||
| Mist sprayer | O1 | 10.9 ± 2.0 a | 2.8 ± 1 a | 186.9 ± 23.2 a | 36.6 ± 15.5 a | 25.7 |
| O2 | 7.5 ± 2.3 a | 5.2 ± 4.4 a | 124.9 ± 30.1 b | 26.9 ± 10.3 a | 69.3 | |
| O3 | 2.4 ± 0.9 b | 0.5 ± 0.4 a | 60.0 ± 16.3 c | 15.5 ± 9.3 a | 20.8 | |
| I1 | 2.0 ± 1.0 b | 0.6 ± 0.3 a | 48.7 ± 17.6 c | 19.8 ± 10.8 a | 30.0 | |
| I2 | 2.4 ± 1.7 b | 0.1 ± 0.1 a | 38.1 ± 17.7 c | 4.8 ± 2.5 a | 4.2 | |
| UAV | O1 | 14.6 ± 4.0 a | 1.4 ± 1.1 a | 22.1 ± 4.0 a | 4.0 ± 2.2 ab | 9.6 |
| O2 | 6.6 ± 2.7 b | 5.2 ± 3.8 a | 12.9 ± 4.7 ab | 9.4 ± 4.2 ab | 78.8 | |
| O3 | 7.9 ± 2.0 ab | 5.8 ± 2.7 a | 16.1 ± 3.7 ab | 11.9 ± 3.7 a | 73.4 | |
| I1 | 1.0 ± 0.4 b | 0.2 ± 0.1 a | 6.6 ± 2.3 bc | 2.3 ± 0.6 b | 20.0 | |
| I2 | 4.1 ± 2.0 b | 0.3 ± 0.3 a | 1.8 ± 0.8 c | 1.8 ± 0.8 b | 7.3 | |
| ACSPPS | O1 | 27.8 ± 6.7 a | 3.2 ± 1.6 a | 120.5 ± 22.3 a | 49.7 ± 19.3 a | 11.5 |
| O2 | 25.8 ± 7.9 a | 4.4 ± 2.6 a | 116.7 ± 29.8 a | 26.6 ± 10.9 b | 17.0 | |
| O3 | 21.1 ± 7.3 a | 0.6 ± 0.3 a | 89.1 ± 28.3 a | 5.0 ± 1.3 b | 2.8 | |
| I1 | 24.0 ± 7.3 a | 0.5 ± 0.2 a | 124.1 ± 37.0 a | 11.4 ± 3.4 b | 2.0 | |
| I2 | 8.9 ± 2.6 a | 1.2 ± 1.0 a | 79.9 ± 21.9 a | 9.2 ± 6.2 b | 13.5 | |
| Parameter | Treatment | |||
|---|---|---|---|---|
| Mist Sprayer | UAV | ACSPPS | ||
| Upperside droplet size | Dv50upp (μm) | 189.0 ± 7.5 b | 792.7 ± 69.9 a | 968.6 ± 127.7 a |
| Underside droplet size | Dv50und (μm) | 152.1 ± 9.6 b | 470.0 ± 56.3 a | 345.3 ± 45.3 a |
| Mean droplet size | DV50 (μm) | 170.6 ± 8.6 b | 631.4 ± 63.1 a | 656.9 ± 76.0 a |
| Upperside coverage | SCupp (%) | 5.0 ± 0.8 b | 6.8 ± 1.2 b | 19.7 ± 4.5 a |
| Underside coverage | SCund (%) | 1.8 ± 0.8 a | 2.5 ± 1.1 a | 2.0 ± 0.6 a |
| Mean coverage | SC (%) | 3.4 ± 0.6 b | 4.6 ± 1.0 b | 10.85 ± 2.3 a |
| Coverage distribution uniformity | CVCov (%) | 165.9 | 158.0 | 124.8 |
| Upperside deposit density | Ndupp (deposit/cm2) | 91.7 ± 11.1 a | 11.5 ± 1.7 b | 106.1 ± 12.1 a |
| Underside deposit density | Ndund (deposit/cm2) | 20.7 ± 5.4 a | 5.9 ± 0.8 a | 21.1 ± 4.9 a |
| Mean deposit density | Nd (deposit/cm2) | 56.2 ± 8.3 a | 8.7 ± 1.2 b | 67.6 ± 10.2 a |
| Upperside deposition | βupp (μg/cm2) | 0.34 ± 0.1 | 0.77 ± 0.3 | 1.4 ± 0.4 |
| Underside deposition | βund (μg/cm2) | 0.18 ± 0.1 | 0.59 ± 0.3 | 0.54 ± 0.3 |
| Mean deposition | Β (μg/cm2) | 0.26 ± 0.1 | 0.68 ± 0.3 | 0.97 ± 0.3 |
| Vertical penetration coefficient | KV (%) | 27.8 | 33.4 | / |
| Proportion of inner canopy deposition | RI (%) | 37.1 | 18.0 | 34.2 |
| Ground loss rate | RGroundloss (%) | 21.8 | 21.2 | 21.2 |
| Application Ratios | UAV | 9:1 | 8:2 | 7:3 | 6:4 | 5:5 | 4:6 | 3:7 | 2:8 | 1:9 | Vehicle |
|---|---|---|---|---|---|---|---|---|---|---|---|
| droplet deposition index/% | 26.3 ± 11.9 | 26.3 ± 10.5 | 26.3 ± 9.9 | 26.2 ± 8.5 | 26.2 ± 7.1 | 26.2 ± 5.7 | 26.2 ± 4.6 | 26.1 ± 3.6 | 26.1 ± 3.7 | 26.1 ± 5.6 | 26.1 ± 7.8 |
| CV/% | 45.24 | 39.92 | 37.56 | 32.44 | 27.23 | 21.81 | 17.72 | 13.64 | 14.34 | 21.29 | 29.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Han, L.; Liu, L.; Huang, Z.; Wang, C.; He, X. Design and Spray Performance Evaluation of an Air–Ground Cooperation Stereoscopic Plant Protection System for Mango Orchards. Agronomy 2023, 13, 2007. https://doi.org/10.3390/agronomy13082007
Li Y, Han L, Liu L, Huang Z, Wang C, He X. Design and Spray Performance Evaluation of an Air–Ground Cooperation Stereoscopic Plant Protection System for Mango Orchards. Agronomy. 2023; 13(8):2007. https://doi.org/10.3390/agronomy13082007
Chicago/Turabian StyleLi, Yangfan, Leng Han, Limin Liu, Zhan Huang, Changling Wang, and Xiongkui He. 2023. "Design and Spray Performance Evaluation of an Air–Ground Cooperation Stereoscopic Plant Protection System for Mango Orchards" Agronomy 13, no. 8: 2007. https://doi.org/10.3390/agronomy13082007
APA StyleLi, Y., Han, L., Liu, L., Huang, Z., Wang, C., & He, X. (2023). Design and Spray Performance Evaluation of an Air–Ground Cooperation Stereoscopic Plant Protection System for Mango Orchards. Agronomy, 13(8), 2007. https://doi.org/10.3390/agronomy13082007