
Pumpkin Yield Estimation Using Images from a UAV


Abstract
:1. Introduction
2. Materials and Methods
2.1. Image Acquisition and Orthomosaic Generation
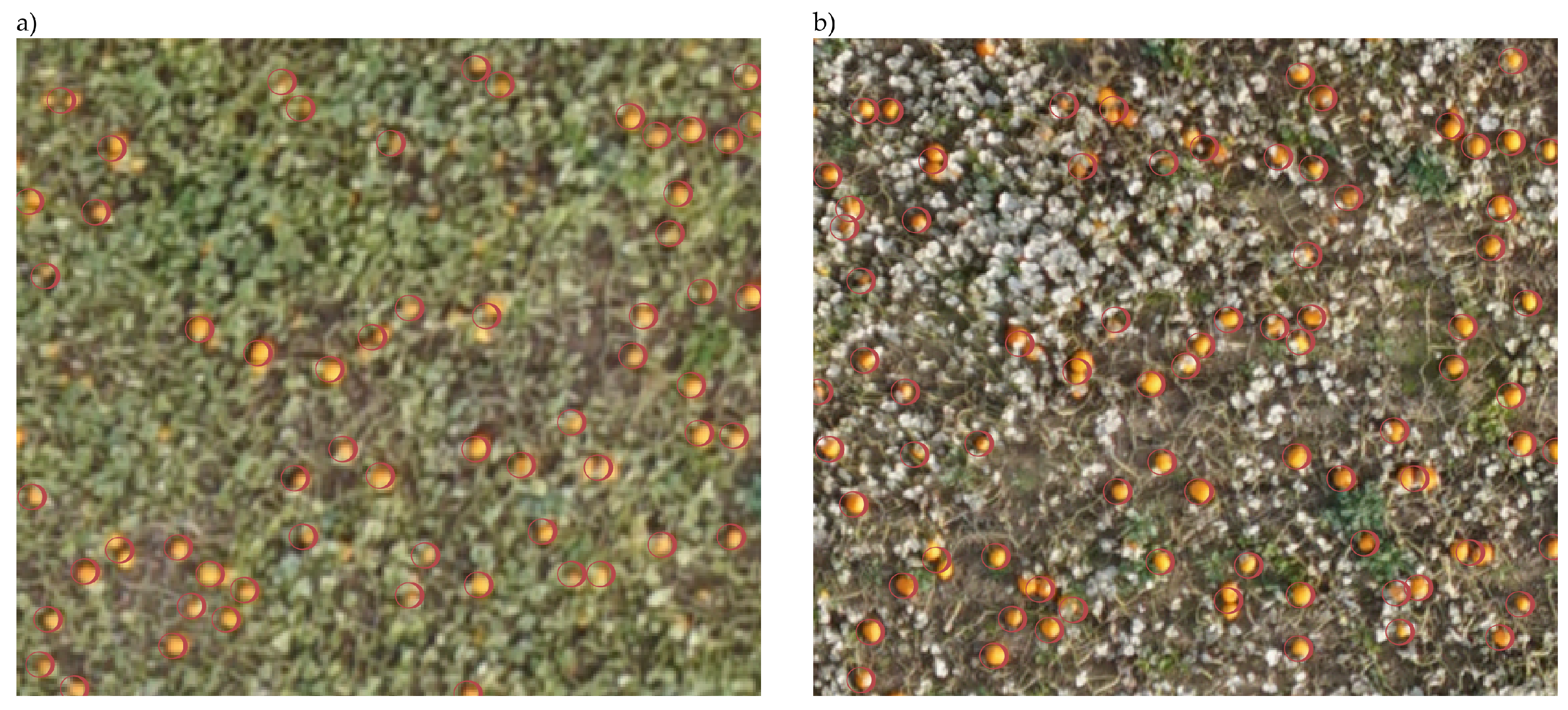
2.2. Pumpkin Detection and Counting
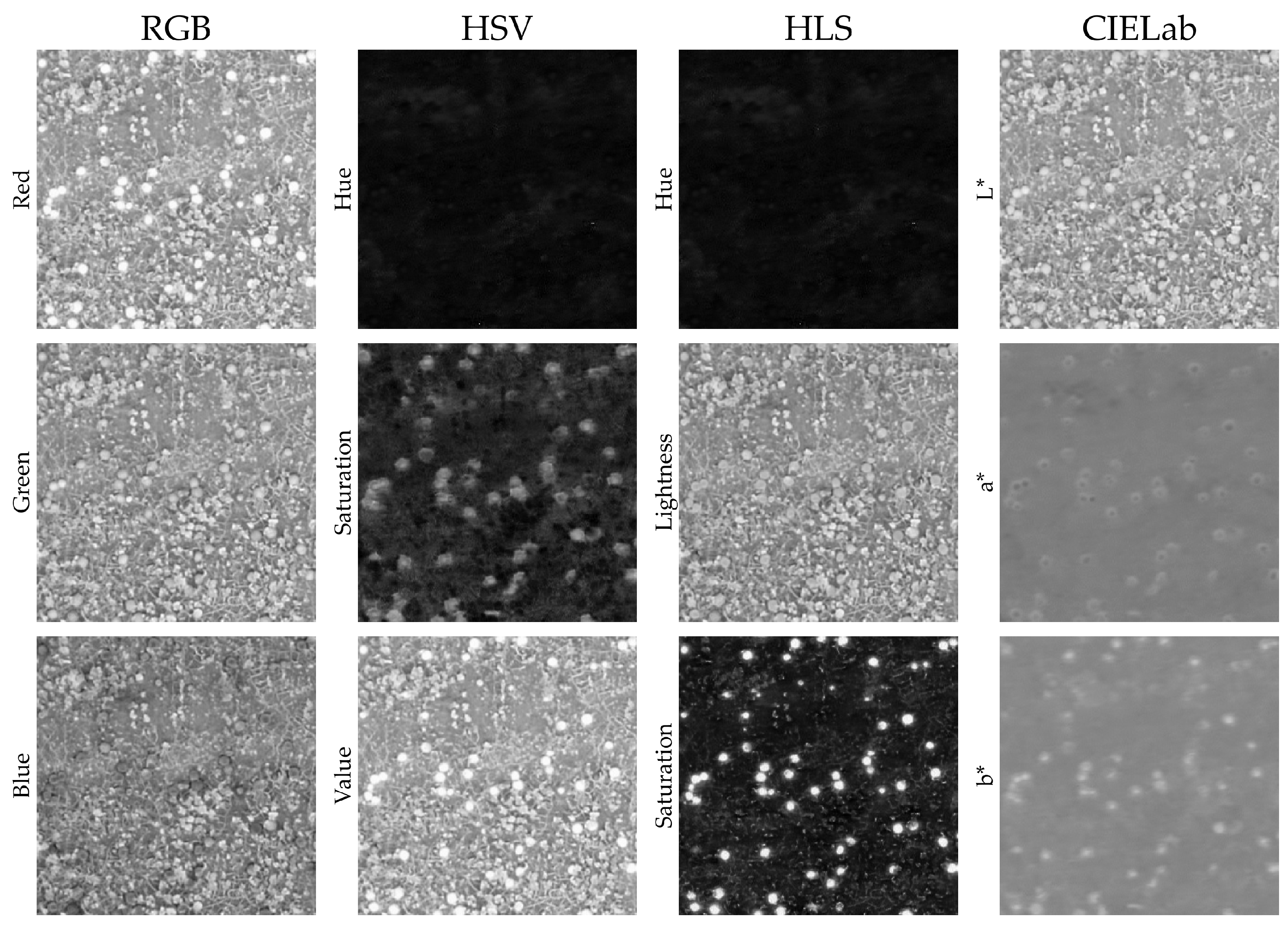
2.2.1. Color Space
2.2.2. Reference Gathering
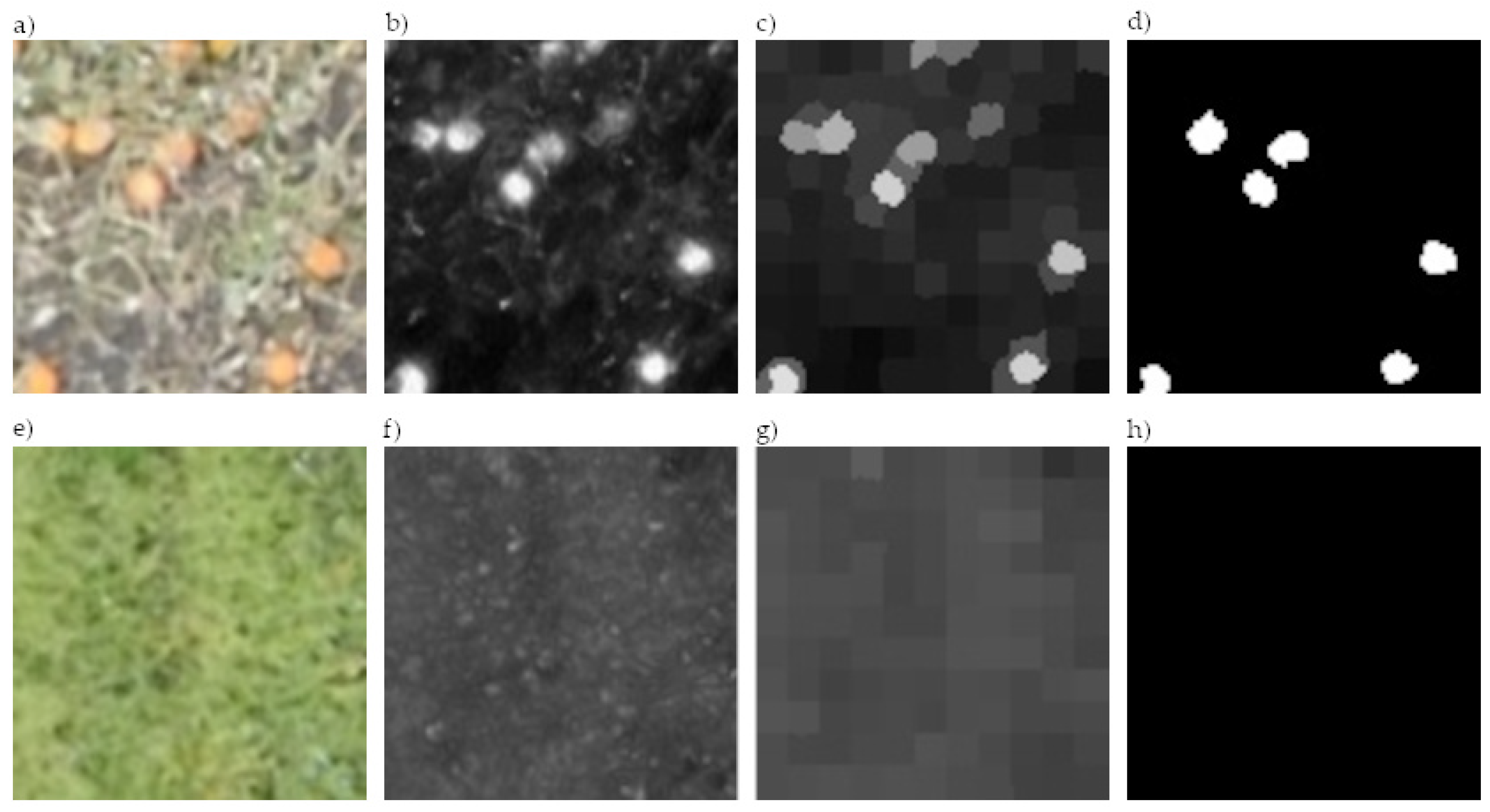
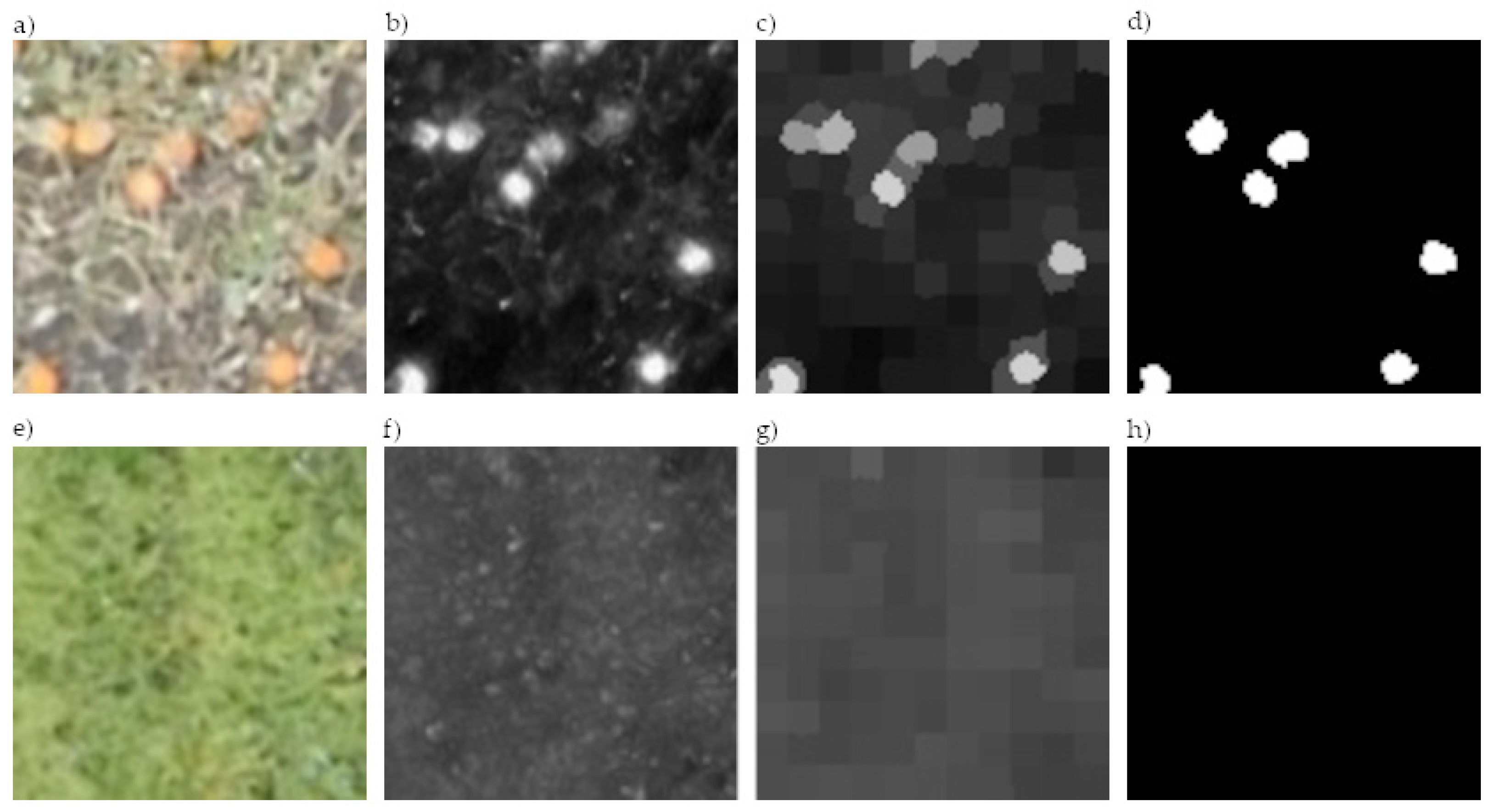
2.2.3. Segmenting Orthomosaics
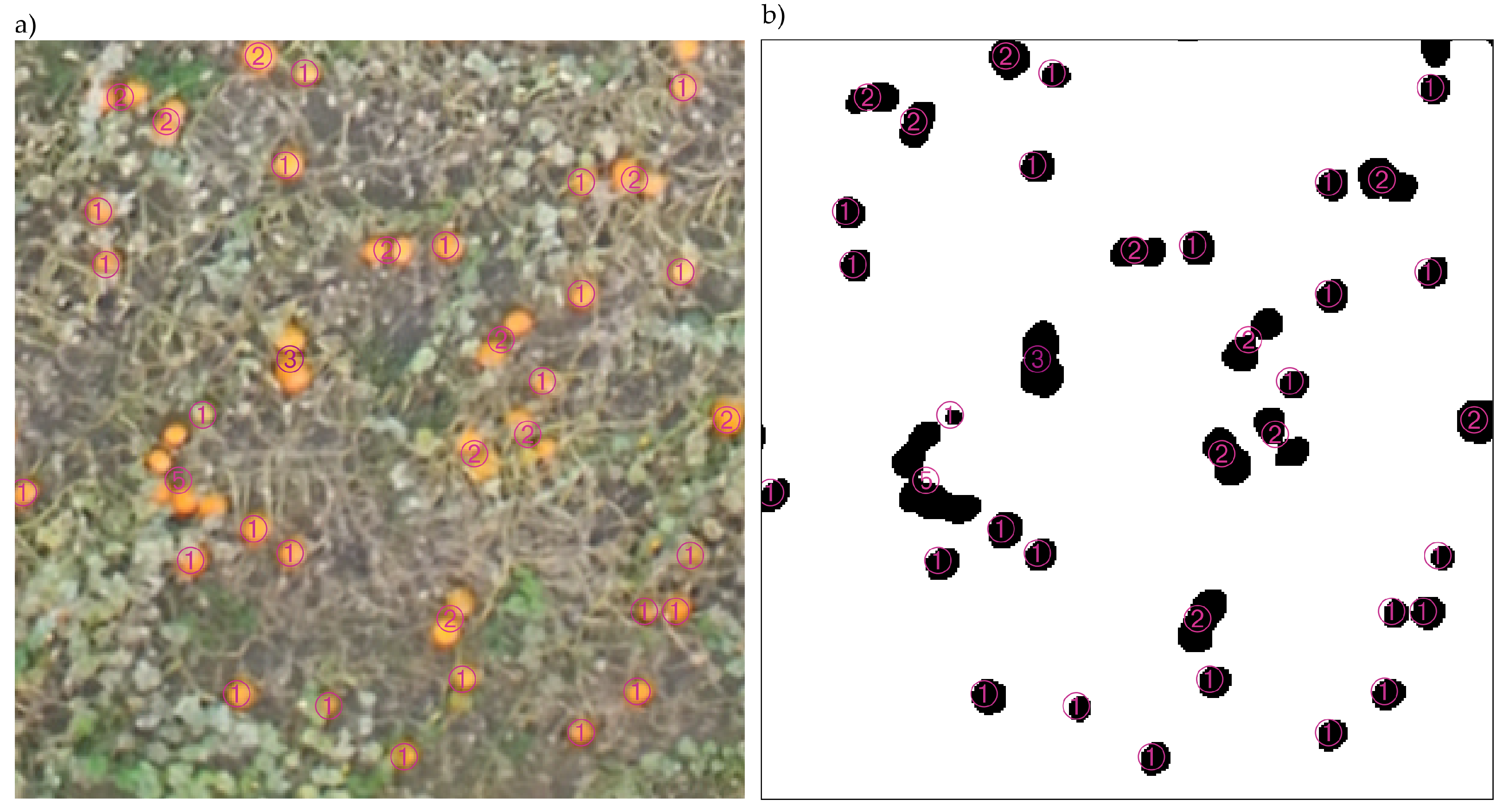
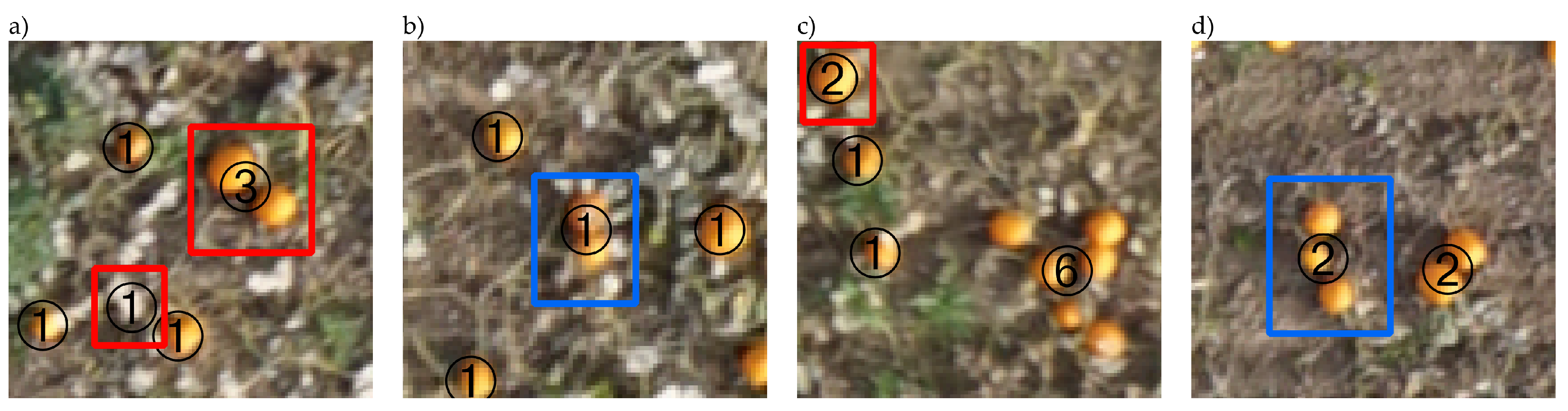
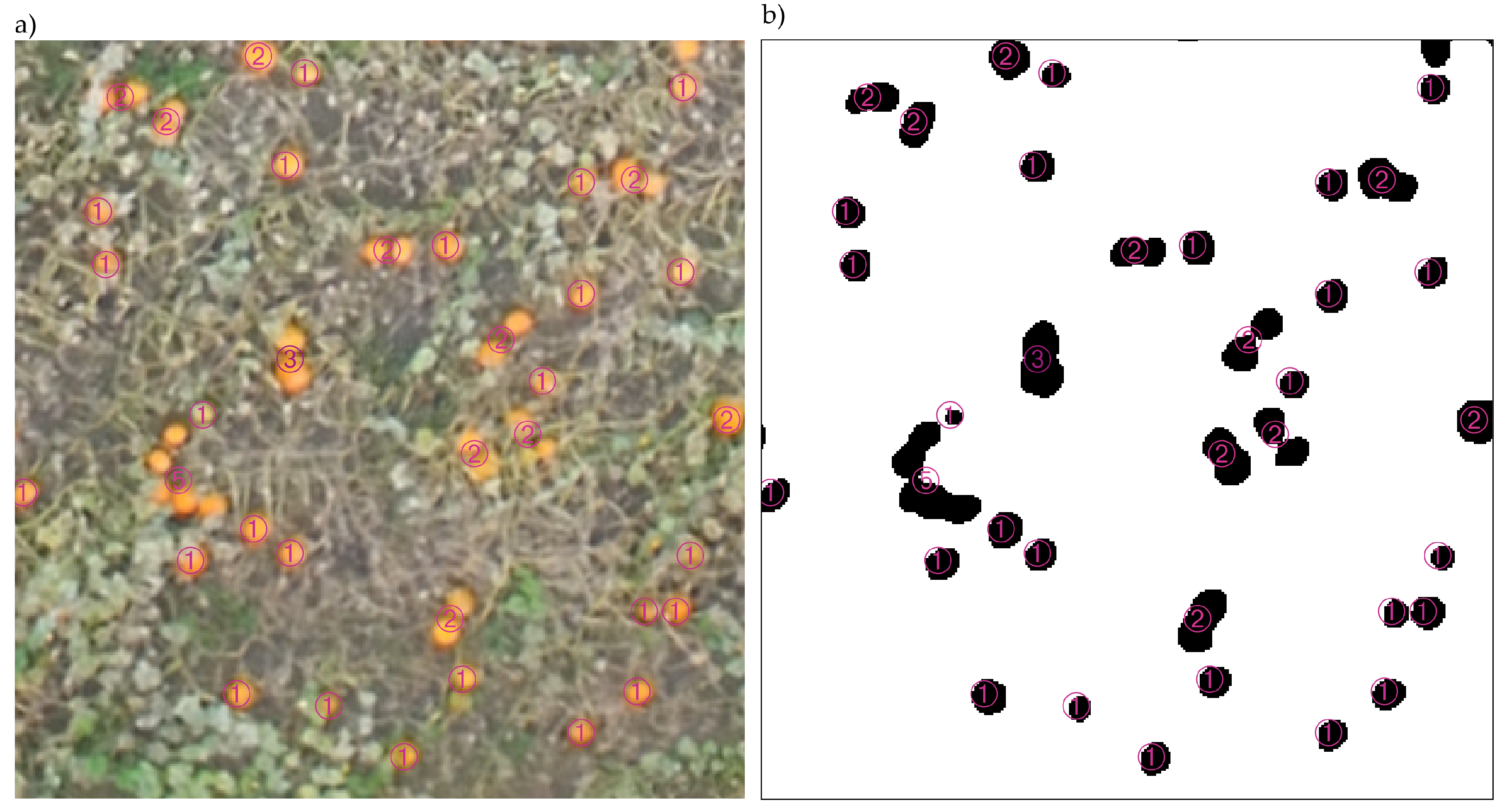
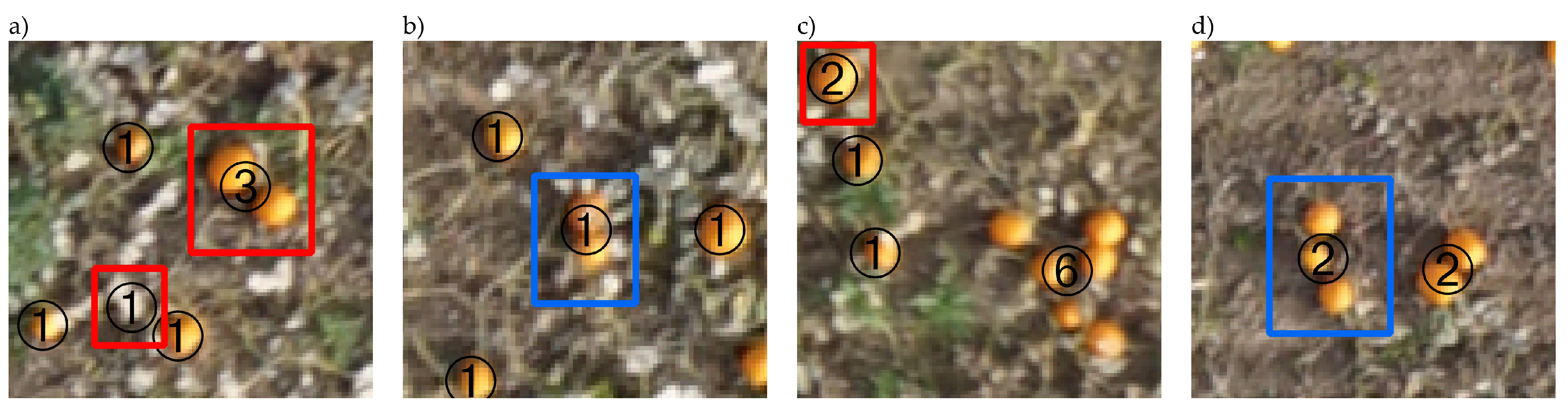
2.2.4. Counting Pumpkins
3. Results
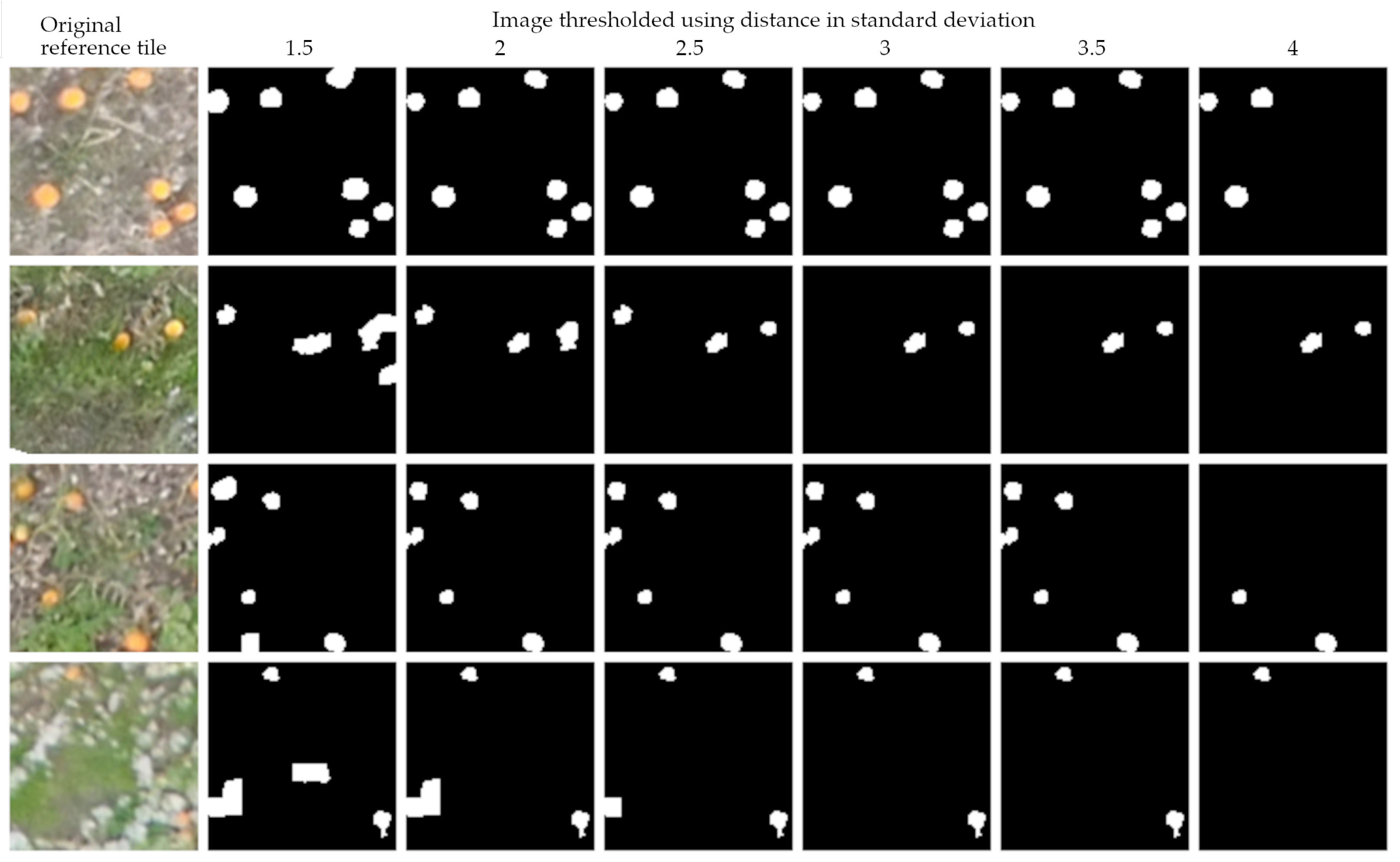
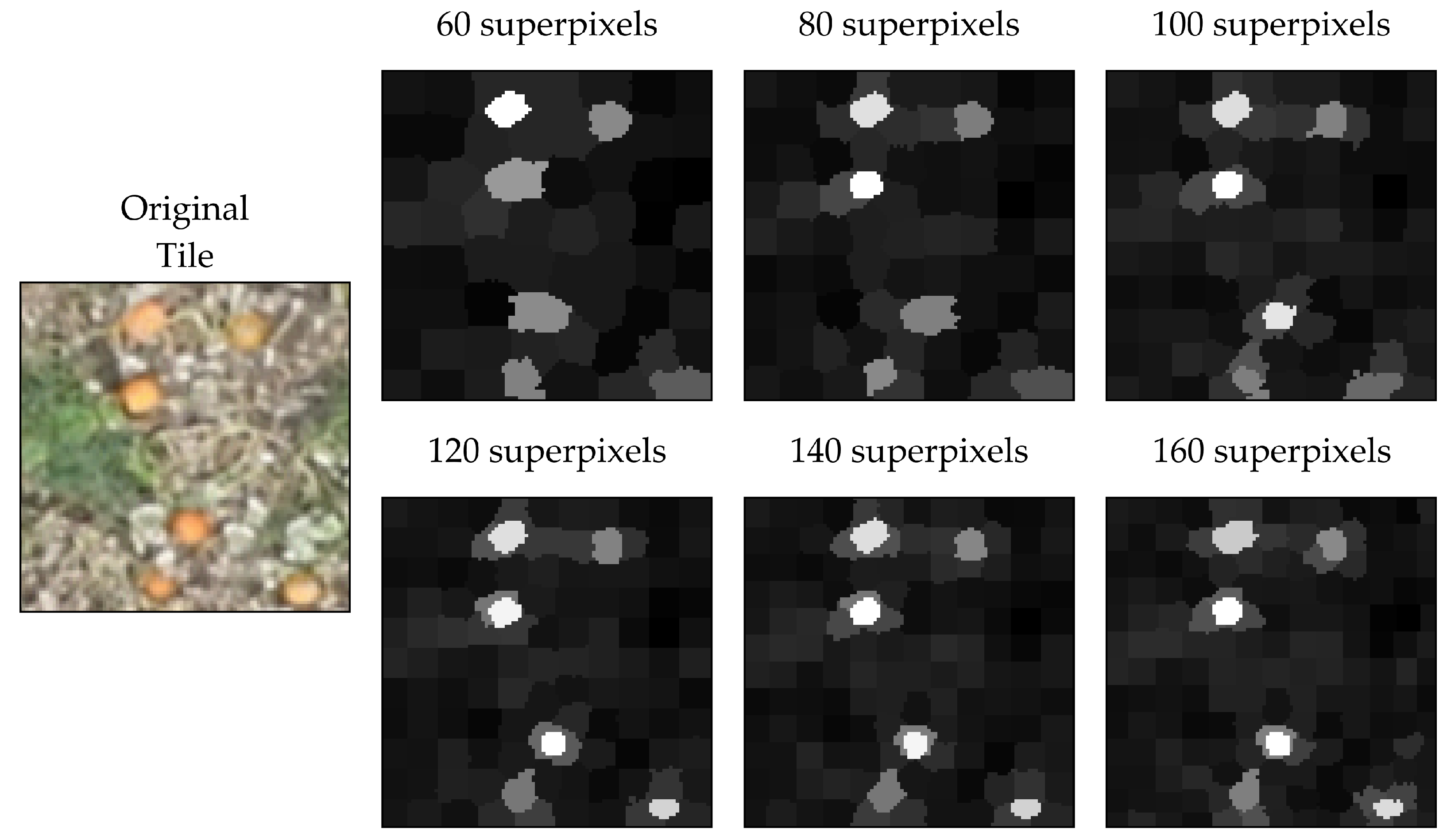
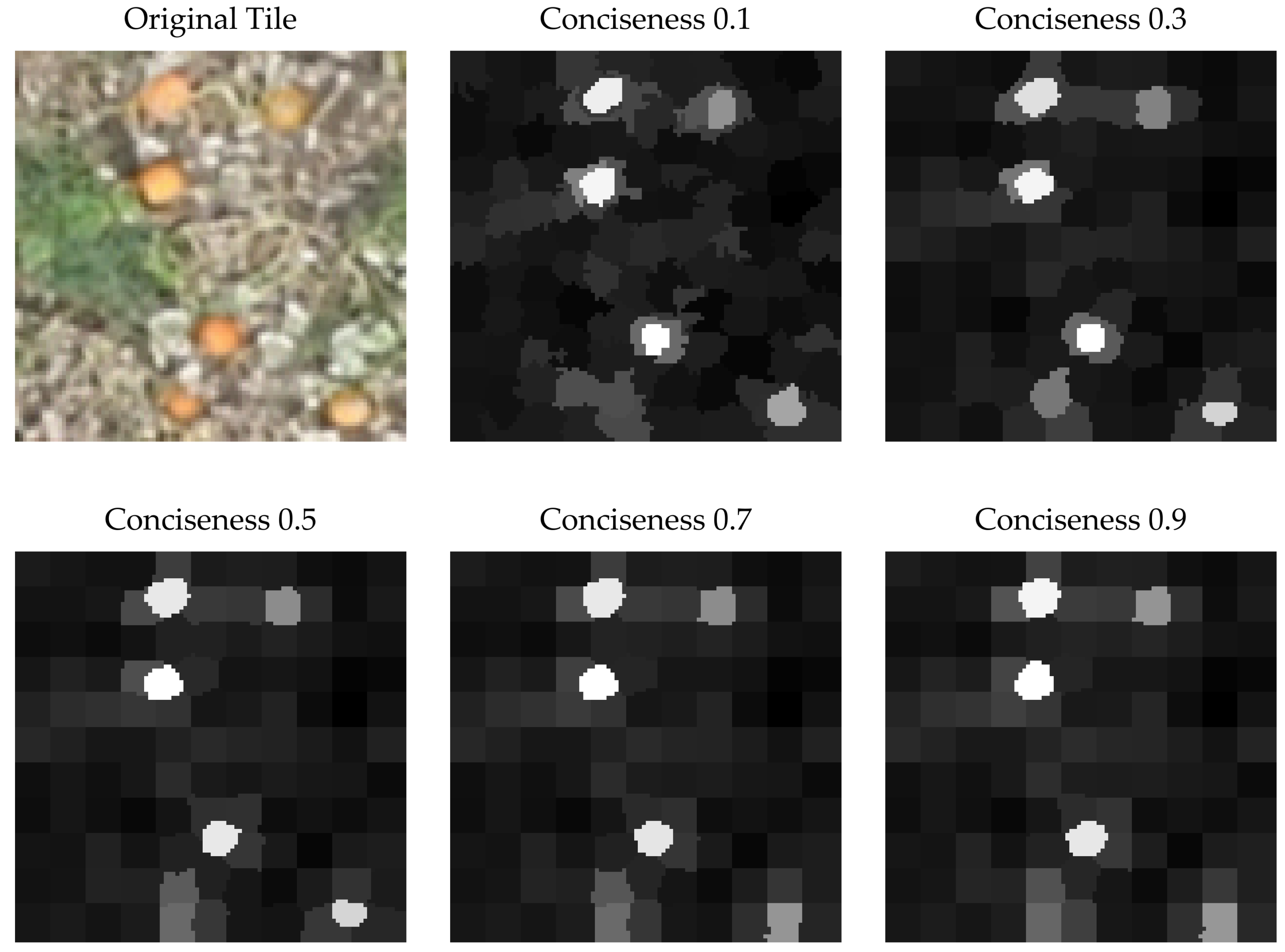
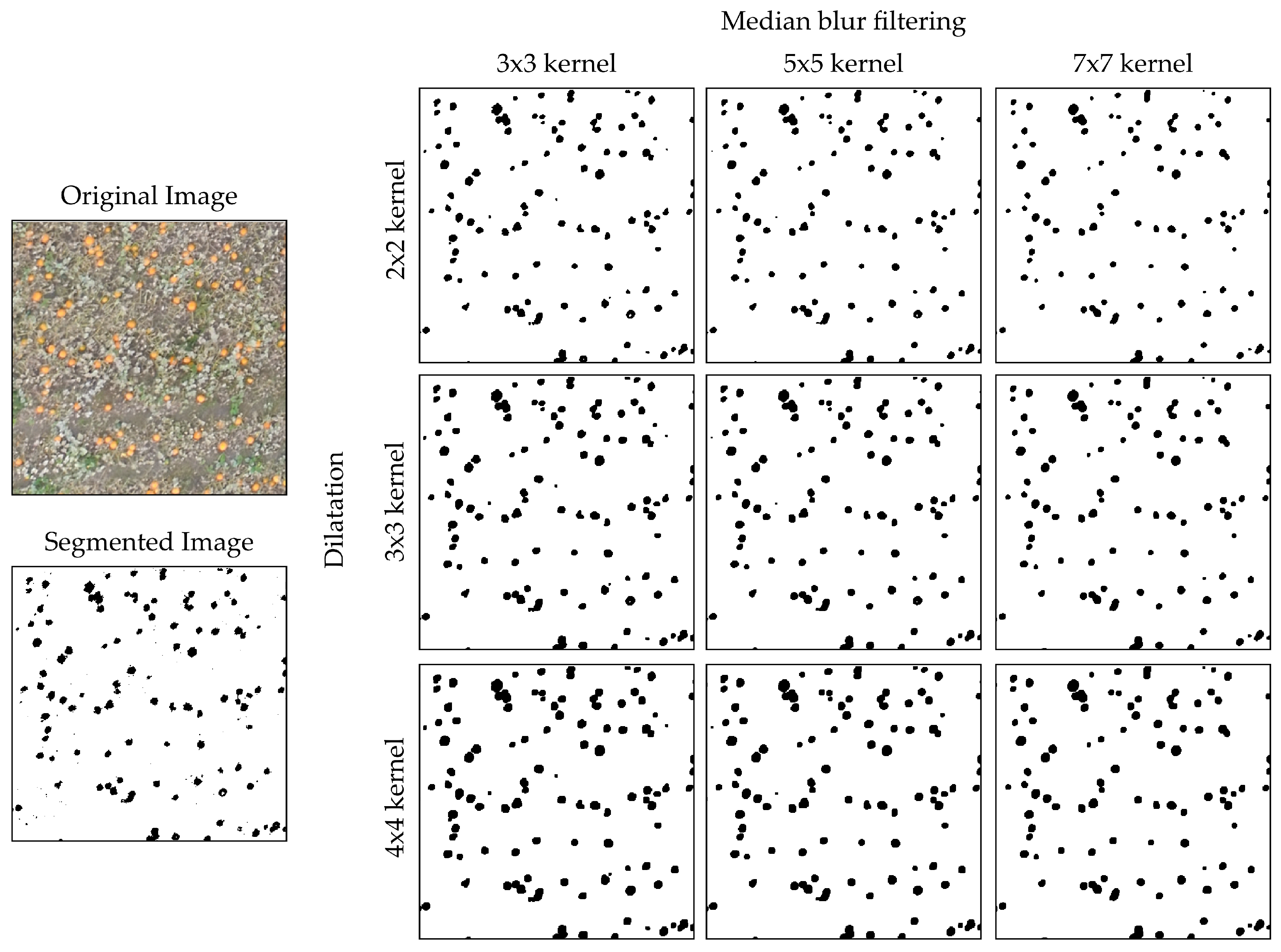
3.1. Threshold Sensitivity Analysis
- Number of superpixels and conciseness parameter;
- Threshold_r—multiplication of standard deviations to classify superpixels as pumpkins;
- Threshold_m—multiplication of standard deviations for a threshold for Mahalanobis distance segmentation;
- Threshold_mb and threshold_d—kernel sizes for median blur and dilatation operations;
- Threshold_a—multiplication of standard deviations to differentiate between single and multiple pumpkin blobs.
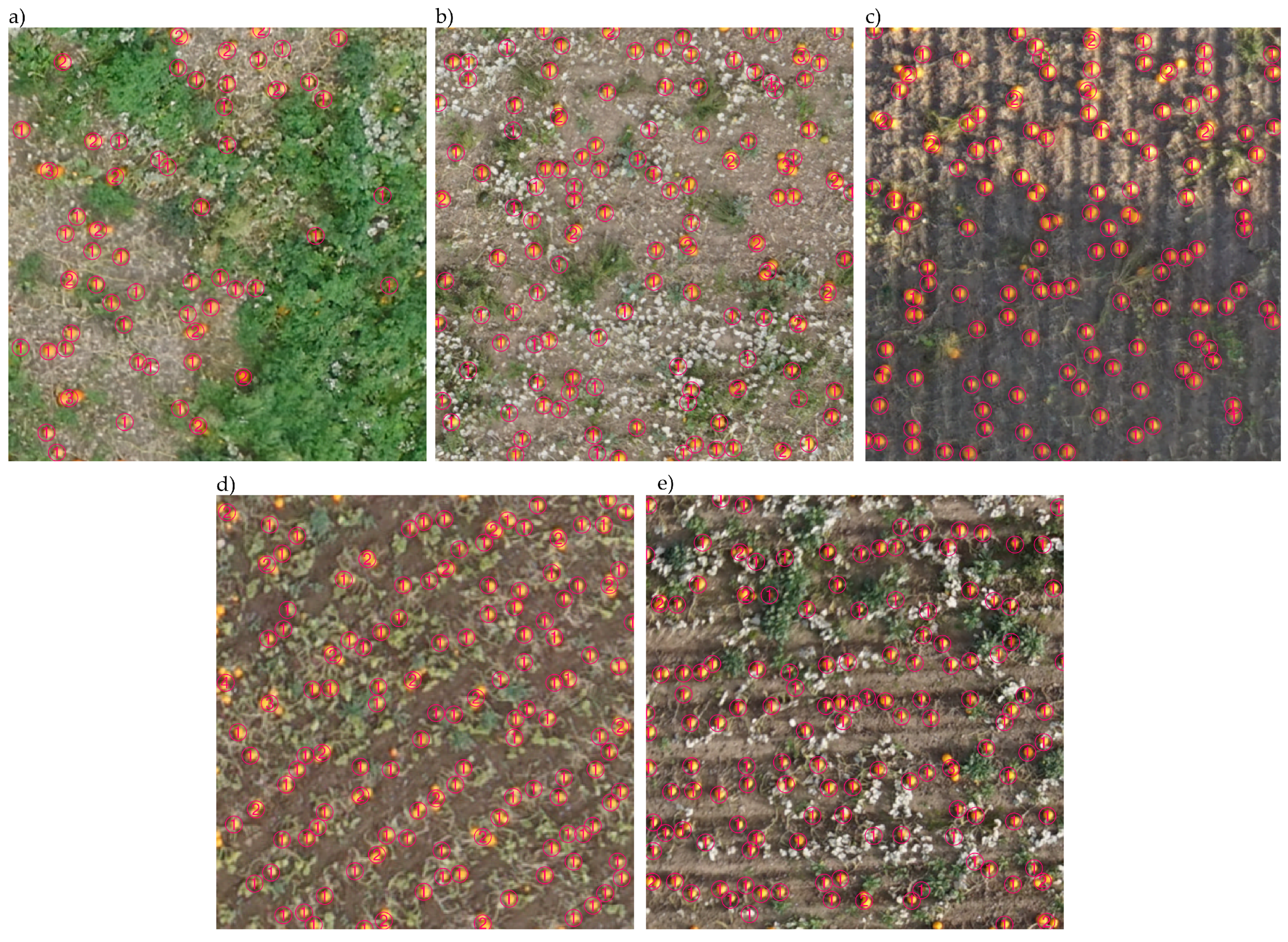
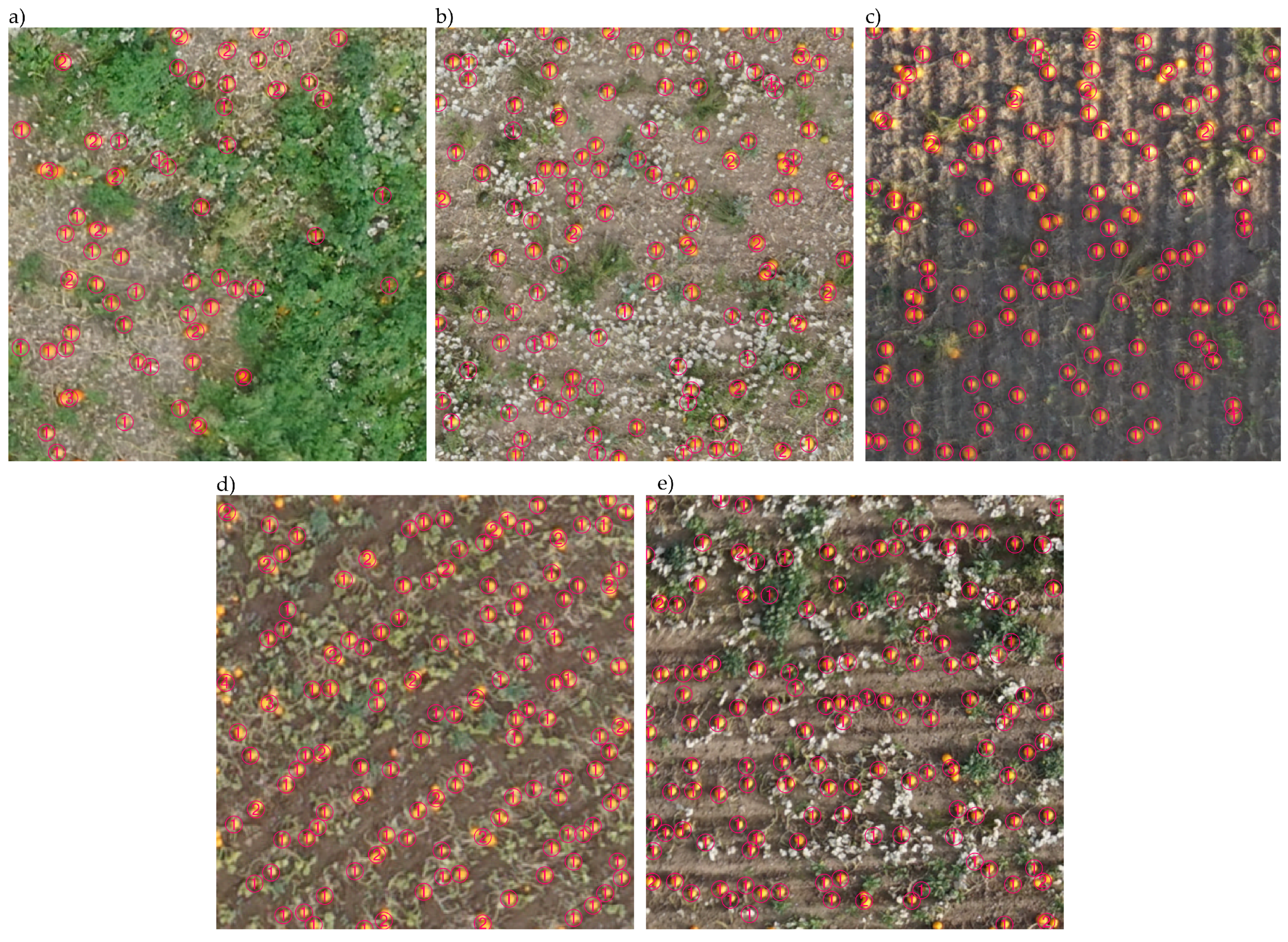
3.2. Results
3.3. Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, Y.; Thomasson, J.A.; Murray, S.C.; Pugh, N.A.; Rooney, W.L.; Shafian, S.; Rajan, N.; Rouze, G.; Morgan, C.L.S.; Neely, H.L.; et al. Unmanned Aerial Vehicles for High-Throughput Phenotyping and Agronomic Research. PLoS ONE 2016, 11, e0159781. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, L.; Fang, W.; Zhao, G.; Wu, Z.; Fu, L.; Li, R.; Majeed, Y.; Dhupia, J. Fruit yield prediction and estimation in orchards: A state-of-the-art comprehensive review for both direct and indirect methods. Comput. Electron. Agric. 2022, 195, 106812. [Google Scholar] [CrossRef]
- Sankaran, S.; Quirós, J.J.; Knowles, N.R.; Knowles, L.O. High-Resolution Aerial Imaging Based Estimation of Crop Emergence in Potatoes. Am. J. Potato Res. 2017, 94, 658–663. [Google Scholar] [CrossRef]
- Chen, R.; Chu, T.; Landivar, J.A.; Yang, C.; Maeda, M.M. Monitoring cotton (Gossypium hirsutum L.) germination using ultrahigh-resolution UAS images. Precis. Agric. 2018, 19, 161–177. [Google Scholar] [CrossRef]
- Varela, S.; Dhodda, P.; Hsu, W.; Prasad, P.V.; Assefa, Y.; Peralta, N.; Griffin, T.; Sharda, A.; Ferguson, A.; Ciampitti, I. Early-Season Stand Count Determination in Corn via Integration of Imagery from Unmanned Aerial Systems (UAS) and Supervised Learning Techniques. Remote Sens. 2018, 10, 343. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Desai, S.V.; Balasubramanian, V.N.; Rajalakshmi, P.; Guo, W.; Balaji Naik, B.; Balram, M.; Desai, U.B. Efficient Maize Tassel-Detection Method using UAV based remote sensing. Remote Sens. Appl. Soc. Environ. 2021, 23, 100549. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Han, J.; Zhang, L.; Bian, C.; Jin, L.; Liu, J. The estimation of crop emergence in potatoes by UAV RGB imagery. Plant Methods 2019, 15, 15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wittstruck, L.; Kühling, I.; Trautz, D.; Kohlbrecher, M.; Jarmer, T. UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation. Sensors 2020, 21, 118. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Gnädinger, F.; Schmidhalter, U. Digital Counts of Maize Plants by Unmanned Aerial Vehicles (UAVs). Remote Sens. 2017, 9, 544. [Google Scholar] [CrossRef] [Green Version]
- Koh, J.C.; Hayden, M.; Daetwyler, H.; Kant, S. Estimation of crop plant density at early mixed growth stages using UAV imagery. Plant Methods 2019, 15, 64. [Google Scholar] [CrossRef] [PubMed]
- Fernandez-Gallego, J.A.; Lootens, P.; Borra-Serrano, I.; Derycke, V.; Haesaert, G.; Roldán-Ruiz, I.; Araus, J.L.; Kefauver, S.C. Automatic wheat ear counting using machine learning based on RGB UAV imagery. Plant J. 2020, 103, 1603–1613. [Google Scholar] [CrossRef] [PubMed]
- Mekhalfi, M.L.; Nicolò, C.; Ianniello, I.; Calamita, F.; Goller, R.; Barazzuol, M.; Melgani, F. Vision system for automatic on-tree kiwifruit counting and yield estimation. Sensors 2020, 20, 4214. [Google Scholar] [CrossRef] [PubMed]
- Ribera, J.; Chen, Y.; Boomsma, C.; Delp, E.J. Counting plants using deep learning. In Proceedings of the 2017 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Montreal, QC, Canada, 14–16 November 2017; Volume 2018, pp. 1344–1348. [Google Scholar] [CrossRef]
- Valente, J.; Sari, B.; Kooistra, L.; Kramer, H.; Mücher, S.; Kramer, ·.H.; Mücher, ·.S.; Nl, J.V. Automated crop plant counting from very high-resolution aerial imagery. Precis. Agric. 2020. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, B.; Yang, C.; Shi, Y.; Liao, Q.; Zhou, G.; Wang, C.; Xie, T.; Jiang, Z.; Zhang, D.; et al. Rapeseed Stand Count Estimation at Leaf Development Stages With UAV Imagery and Convolutional Neural Networks. Front. Plant Sci. 2020. [Google Scholar] [CrossRef] [PubMed]
- Vadhavkar, N. Case Study: Identifying Pumpkins with Drones and Machine Learning—Raptor Maps. 2017. Available online: https://deveron.com/wp-content/uploads/2020/01/deveron-casestudy-pumpkin_nov1-1.pdf (accessed on 1 September 2019).
- Agisoft. Metashape. 2018. Available online: www.agisoft.com (accessed on 1 September 2019).
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000, 25, 120–123. [Google Scholar]
- Gillies, S.; Ward, B.; Petersen, A.S. Rasterio: Geospatial Raster I/O for Python Programmers. 2013. Available online: https//github.com/mapbox/rasterio (accessed on 1 March 2019).
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mahalanobis, P.C. On the generalised distance in statistics. Proc. Natl. Inst. Sci. India 1936, 2, 49–55. [Google Scholar]
- QGIS Geographic Information System. Open Source Geospatial Foundation Project. 2019. Available online: http://www.qgis.org/ (accessed on 10 March 2019).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Date | Field | Camera | Area [m2] | GSD [m] |
|---|---|---|---|---|---|
| G2017_102-1 | 19 September 2017 | 102-1 | sensFly S.O.D.A. | 32,066 | 0.025 |
| G2018_104-0 | 23 August 2018 | 104-0 | Sony UMC-R10C | 361,049 | 0.020 |
| G2019_106-0 | 17 September 2019 | 106-0 | Sony UMC-R10C | 229,609 | 0.025 |
| G2020_105-0 I | 27 August 2020 | 105-0 | Sony UMC-R10C | 468,805 | 0.036 |
| G2020_105-0 II | 17 September 2020 | 105-0 | Sony UMC-R10C | 468,805 | 0.025 |
| Dataset | Reference Tile Size [m] | Superpixels/ Conciseness | threshold_r | threshold_m | threshold_mb/ threshold_d | threshold_a |
|---|---|---|---|---|---|---|
| G2017_102-1 | 2.5 × 2.5 | 30 | 120/0.3 | 3 | 5 × 5/3 × 3 | 1.0 |
| G2018_104-0 | 2.5 × 2.5 | 30 | 120/0.3 | 3 | 5 × 5/3 × 3 | 1.0 |
| G2019_106-0 | 2.5 × 2.5 | 30 | 120/0.3 | 3 | 5 × 5/3 × 3 | 1.0 |
| G2020_105-0 I | 2.5 × 2.5 | 30 | 120/0.3 | 3 | 5 × 5/3 × 3 | 1.0 |
| G2020_105-0 II | 2.5 × 2.5 | 30 | 120/0.3 | 3 | 5 × 5/3 × 3 | 1.0 |
| Dataset | Mahalanobis Threshold | Estimated Number of Pumpkins | Pumpkins per m2 | Processing Time [s] | Reference Color | Covariance Matrix |
|---|---|---|---|---|---|---|
| G2017_102-1 | 1.97 | 23,931 | 0.75 | 11.2 | [17.17 192.37] | [11.71 15.34] [15.34 2286.79] |
| G2018_104-0 | 1.92 | 319,616 | 0.89 | 133.3 | [18.22 186.06] | [9.79 85.20] [85.20 2135.87] |
| G2019_106-0 | 1.99 | 238,986 | 0.51 | 71.1 | [19.16 206.54] | [25.48 131.84] [131.84 1668.06] |
| G2020_105-0 I | 1.98 | 405,826 | 0.87 | 151.0 | [18.46 185.15] | [8.61 41.46] [41.46 2031.58] |
| G2020_105-0 II | 1.94 | 470,685 | 1.00 | 61.5 | [17.94 193.20] | [18.70 124.87] [124.87 1902.46] |
| Dataset | Validation Area in 10 × 10 m2 Tiles | True Positive | False Positive | False Negative | Precision | Recall | F1 Score |
|---|---|---|---|---|---|---|---|
| G2017_102-1 | 16 | 1061 | 31 | 32 | 0.972 | 0.971 | 0.971 |
| G2018_104-0 | 181 | 15,297 | 284 | 196 | 0.982 | 0.987 | 0.985 |
| G2019_106-0 | 115 | 11,186 | 479 | 223 | 0.959 | 0.980 | 0.970 |
| G2020_105-0 I | 234 | 20,534 | 84 | 408 | 0.996 | 0.981 | 0.988 |
| G2020_105-0 II | 234 | 21,039 | 271 | 297 | 0.987 | 0.986 | 0.987 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Midtiby, H.S.; Pastucha, E. Pumpkin Yield Estimation Using Images from a UAV. Agronomy 2022, 12, 964. https://doi.org/10.3390/agronomy12040964
Midtiby HS, Pastucha E. Pumpkin Yield Estimation Using Images from a UAV. Agronomy. 2022; 12(4):964. https://doi.org/10.3390/agronomy12040964
Chicago/Turabian StyleMidtiby, Henrik Skov, and Elżbieta Pastucha. 2022. "Pumpkin Yield Estimation Using Images from a UAV" Agronomy 12, no. 4: 964. https://doi.org/10.3390/agronomy12040964
APA StyleMidtiby, H. S., & Pastucha, E. (2022). Pumpkin Yield Estimation Using Images from a UAV. Agronomy, 12(4), 964. https://doi.org/10.3390/agronomy12040964