1. Introduction
The information of interest in the agricultural sector consists of traits or features of systems that vary in space and time. Understanding how to manage agricultural processes implies considering many hundreds if not thousands of variables. Thus, agriculture is one of the most difficult fields for statistical quantification. Even within a single field, conditions are always changing from one section to the next. The weather is hard to predict, the quality of the soil changes and there is always the possibility of pests and diseases. Traditionally, many of these traits have been managed by the own experience and expertise of the farmers. Although they may think the prospects for an upcoming harvest are good, the outcome is always uncertain until the harvest day arrives.
Precision agriculture (PA) is seen today as a key technological solution enabling the more efficient use of agricultural resources. General goals of PA are the increase of farmers’ profits by improving harvest and/or quality yields, while reducing inputs, and the negative impact of farming on the environment, e.g., such that stems from the over-application of pesticides and fertilizers, and inefficient irrigation.
The emergence of new technological trends like artificial intelligence (AI) enables farmers to take a data-driven approach to collect and analyze large amounts of data to gain knowledge about the real-time status of their fields to improve farm yield and mitigate risks from weeds, pests, and diseases. The development of intelligent sensors, instrumentation and machines is beginning to play a crucial role in agricultural systems, which are affected by several factors such as environmental conditions, soil characteristics, water availability, harvesting practices, plant diseases, weeds, and other pests. In the near future, the integration of automated data collection and analysis, AI algorithms and decision support tools will provide advanced tools towards PA. Moreover, robotic systems, on the ground and in the air, will also have a major role in bringing PA and digitalization to the field, for harvesting, pest control or data collection, just to name a few.
This paper explains how data-driven AI applications are key enablers for PA in several European countries. First, the paper summarizes several definitions about terms and concepts related to PA; describes global trends and policies that will foster the implementation of the AI-based solutions in the agricultural sector; provides an overview of the current state-of-the-art regarding the application of AI technologies within the PA. Secondly, the paper provides a summary of the most recent research activities in the form of research projects implemented and validated by the authors in several European countries, with the objective of showing the already achieved results, the current investigations and the still open technical challenges. Finally, several conclusions and future works are presented.
2. Artificial Intelligence for Precision Agriculture
2.1. Global Trends
From ending poverty and hunger to responding to climate change and sustaining natural resources, agriculture is a key component in the 2030 Agenda for Sustainable Development to achieve the Sustainable Development Goals (SGD), as it can be said that agriculture is the common thread which holds the 17 SDGs together. Despite greater productivity, the agricultural sector faces new challenges that threaten human civilization worldwide. With a growing population and the complexity of climate change, the sector has been forced to transition away from industrial methods to data-driven management and automation to grow more food while using fewer precious resources.
In Europe, the
Farm to Fork Strategy presented in the first quarter of 2020 plays a key role to achieve the goals of the EU’s Green Deal, which sets out how to make the continent climate-neutral by 2050 [
1]. It fixes the measures needed to create more efficient, climate-smart agricultural systems that provide healthy food, while securing a decent living for EU farmers. The Strategy targets a significant reduction of the dependency, risk and use of chemical pesticides, as well as of fertilizers; an increase in the EU’s land area dedicated to organic farming; the development of innovative farming techniques that protect harvest from pests and diseases; the reduction of the carbon footprint and water pollution.
To achieve the objectives of both the SDGs and the Farm to Folk Strategy, European farmers need to transform their production methods more quickly and make the best use of nature-based, technological, digital and space-based solutions to optimize their inputs (e.g., water, pesticides, fertilizers) and deliver better climate and environmental results. Such a new paradigm will only be possible with the adoption of technological applications and solutions that are driven by the convergence of several fundamental technologies, which keep a farm productive and profitable by collecting and analyzing data to help farmers manage their resources, produce better crops while optimizing energy and chemical use and mitigating risk.
2.2. What Is Precision Agriculture (PA)?
In the context of digitization in agriculture, two concepts are usually mentioned: precision farming and smart farming. On the one hand, the former can be defined as “an information-led management concept in both plant and animal production that is based on a wide range of technologies”. This concept is based on digital processing of specific information so it can support decision making processes. On the other hand, the latter relates to a “knowledge-based approach in which machines can at least take partially autonomous decisions in collaboration with management systems. The decisions taken by machines are based on autonomously obtained and processed information in real-time, even though farmers always have the possibility to correct them” [
2].
Moreover, the PA concept has also gained ground in the European Union as a “farming management concept based upon observing, measuring and responding to inter and intra-field variability in crops or in aspects of animal rearing” [
3]. PA brings about a change in the land use, by fostering “whole-farm management strategies using information technology, highlighting the potential improvements on production while reducing environmental impacts”. Yost et al. simplified this definition and described PA as a “suite of Information Technologies that focus on producing immediate benefits by being conscious of the environment” [
4]. Moreover, Lezoche et al. have defined the term “Agriculture 4.0” as “the provision of advanced technologies to farmers to meet their production challenges” by establishing the linkages between new 4.0 trends in technologies and agri-food supply chain challenges [
5].
Regardless of the term used, it is undeniable that digitization is leading to on- and off-farm management tasks that focus on different data sources (location, weather, phytosanitary status, inputs consumption, prices) using sensors, machines, unmanned autonomous vehicles (UAV) and satellites to monitor soil, water, plants and humans. Obtained data can be used to make more informed decisions and to reduce uncertainty when predicting the future.
2.3. AI in Precision Agriculture (PA)
Current adoption rate of AI technologies in the agricultural sector is not high due to distinct factors among which a lack of knowledge on its real use plays an important role. Therefore, several studies have focused on the identification of the main AI technologies used in PA as well as documented implementations.
Liakos et al. have presented a comprehensive review of research dedicated to applications of machine learning (ML) in agricultural production systems [
6]. The key fields of application were categorized into crop management, water management, and soil management. They concluded that it is undeniable that agriculture will benefit from ML technologies, which will allow Farm Management Systems to evolve into real-time decision support systems (DSS) thanks to the application of AI algorithms.
Furthermore, van Klompenburg, Kassahun and Catal have performed a systematic literature review (SLR) about the ML algorithms and features used in crop yield prediction studies [
7]. The results show that no specific conclusion can be drawn as to what the best model is, but they clearly show that some ML models such as the random forest, neural networks, linear regression, and gradient boosting tree are used more than the others.
Additionally, Noon et al. have presented a large survey of the application of deep learning (DL) techniques for plant leaf stress identification [
8]. The techniques reviewed were divided in vegetables, fruits and other crops on the basis of stress type, size of dataset, training/test size and the deep network used. Several research gaps have been identified, such as the detection and classification of all severity levels of a stress to detect contagious diseases, or the generalization of algorithms to different crops.
Finally, AI and robotics are playing a key role in helping or substituting manual intervention in the agricultural sector, which covers a large application panel. On the one hand, robotics has played a key role in agricultural production and management, so robots are performing several operations autonomously such as weeding, irrigating or managing individual plants. Zhang et al. have provided a detailed summary of the state-of-the-art robotic grippers, grasping and sensor-based control methods, as well as their applications in robotic agricultural tasks [
9]. Compared to industrial grasping, higher requirements of grasping in agriculture are rising since most of the food and agricultural products are always fragile, easily marked or bruised, adhesive or/and slippery.
On the other hand, drones are being implemented in agriculture for crop health monitoring, irrigation equipment monitoring or weed identification. Roshanianfard et al. described different aspects of autonomous agricultural vehicles that have been developed at Hokkaido University [
10]. The development procedures and characteristics of each unmanned aerial vehicle (UAV) were compared and discussed. Case studies of autonomous vehicles designed and the development process have been presented as practical cases and representative development challenges.
In last years, the EU has actively undertaken R&D activities related to the application of AI for the digitization of agriculture. For example, Bacco et al. provided a survey of the most recent research activities with two main contributions: a survey of relevant research projects recently funded by the EU in the field of PA; a review of the scientific works that propose solutions for its implementation [
11]. Regarding the former, they aim at highlighting the increasing attention towards those research activities and the identification of the involved technologies.
However, to the best of the authors’ knowledge, there are no recent surveys of research activities at European level related to the application of AI technologies for the agricultural sector. Following the approach from Bacco et al., this paper aims at providing an updated version of several European research projects that have been or are being run by the authors. Taken together, these examples represent the current abilities and future potential for AI applications in European agricultural research projects.
3. Results of the European Research Projects
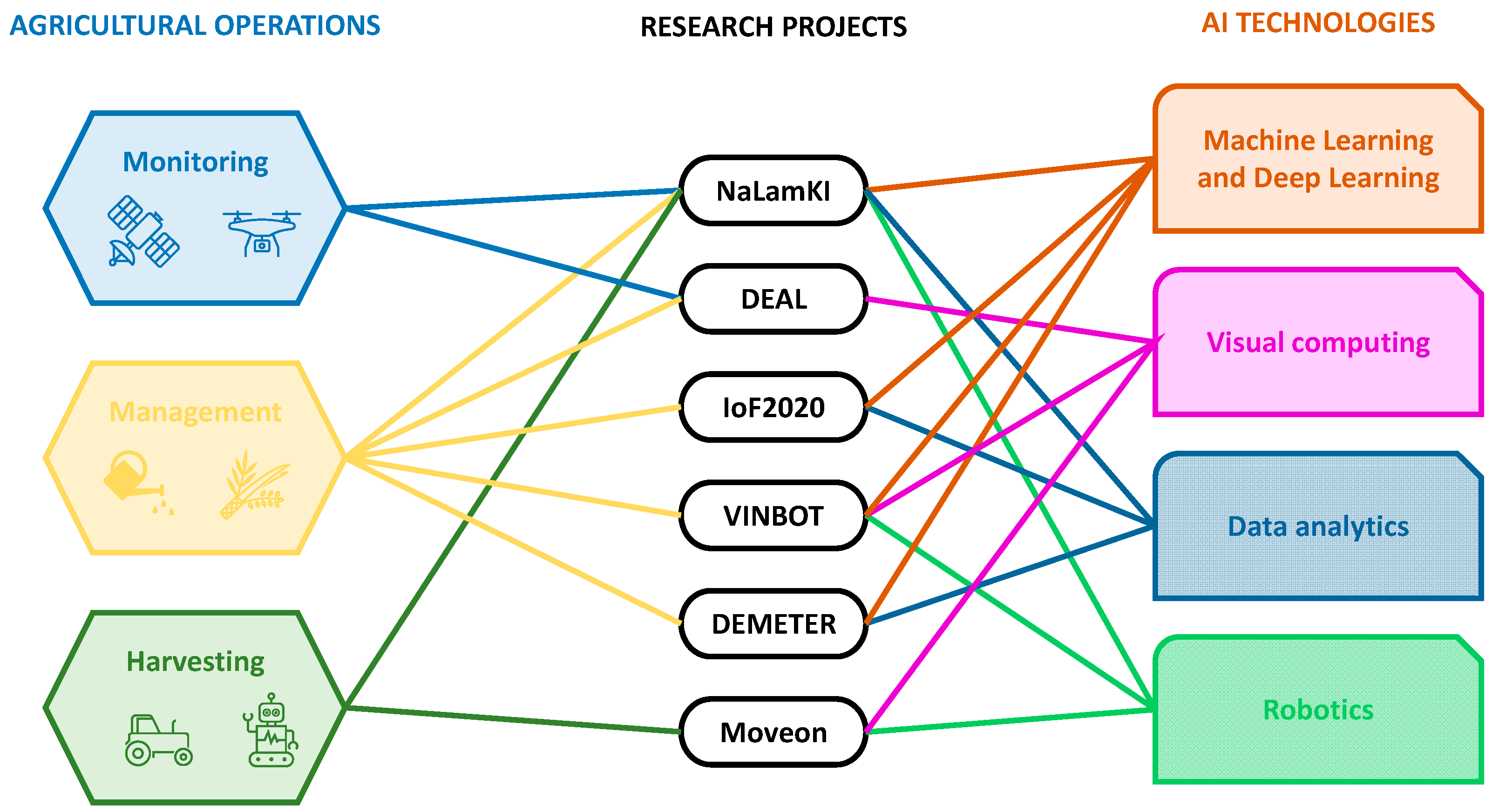
Low replicability and the corresponding difficulty in systematic data gathering is a key challenge in agriculture, as no two fields are exactly alike. Therefore, the comparison of several pilot experiments in different fields, weather conditions and farming techniques can enhance the collective knowledge. Thus, this section provides a summary of the most recent research activities in the form of research projects implemented and validated by the authors in several European countries, with the objective of showing the already achieved results, the current investigations and the still open technical challenges.
Figure 1 depicts relevant agricultural operations faced by the research projects, and the AI-based technological solutions for each of those projects. The objectives, methodologies and material used are different for each of the research projects, and when available, can be further assessed from the existing references.
3.1. AI-Based Data Fusion for Crop Monitoring
Data collection from agricultural areas related to soil watering, plant health or pest infestation often relies on manual inspection due to insufficient capturing methods and missing aggregation of different data sources. However, thanks to the increasing digitization of the sector, the fusion of remote sensing for automated scanning and data analysis with other sources of information (soil analyses, weather forecasts) and powerful AI algorithms is leading to a reduction in the application of fertilizers and pesticides.
In this context, the German Federal Ministry for Economic Affairs and Energy has recently funded the large scale NaLamKI initiative, which aims at developing a cloud-based Software as a Service (SaaS) platform with open interfaces for providers from the upstream and downstream sectors of agriculture, industry, and service providers for special applications in crop production. The initiative aims at the creation of a dataset by the fusion of sensor data from machines, remote sensing (satellites and drones), soil, weather and other existing data sources [
12], so that agricultural processes like irrigation, fertilization, or pest control can be optimized thanks to the application of advanced AI methodologies.
An important focus of the initiative is the visual analysis of plants and fields from images captured by satellites [
13], drones or agricultural vehicles. Furthermore, the combination of multispectral imaging with radar and soil sensors addresses the determination of plant and soil condition [
14]. Finally, powerful AI algorithms will fuse the data and extract information for the optimization of the agricultural processes.
The initiative will target two open research challenges within the AI community. On the one hand, even though methods based on AI have shown precise performance, they degrade with small training datasets (e.g., when trying to detect rare events or diseases on plants). Thus, domain specific knowledge and semantic models should be integrated into the AI methods to increase precision. On the other hand, AI algorithms look like black box systems for farmers, who find it difficult to understand results, reducing acceptance of such solutions. Therefore, methods for explainability will be exploited to validate network decisions and to improve training and network generalization.
Finally, it should be mentioned that the initiative will also focus on the potential problems arising from data privacy with cloud-based agriculture as data will be shared among different stakeholders. Thus, the development of AI methods and services must always ensure data sovereignty along the entire value chain and interoperability between various central and decentralized cloud providers and users in order to increase the acceptance by partners and farmers.
3.2. Agricultural Digital Twins for Geospatial Monitoring
Within the manufacturing domain, the digital twin (DT) concept allows for testing hypotheses through simulations, establishing continuous monitoring and implementing measures for management and maintenance. Although agriculture cannot be compared one-to-one with a factory production line, this concept can be extended to fulfil similar expectations as in the Industry 4.0.
An agricultural DT [
15] represents a generic key component for agricultural applications to build up a reliable database for plantations and fields, to increase accuracy and coverage of crop prediction, and to significantly reduce costs and time expenditure. Acting as a virtual replica of the physical system, the DT provides the ability to examine complex scenarios which involve multiple, intertwined factors at once. Limited existing use cases include, for example, the ability to take measurements ranging from phenotype traits to plantation inventory, the generation of precise weed control maps, or the control of the evolution of the assets over time.
A distinctive characteristic of a DT in agriculture lies on the spatio-temporal dimension of its operation, as it ranges from individual plants to twins of land parcels, farms or regions [
16]. Thus, one of the key concepts required for geospatial DT consists in finding adequate feature spaces for geospatial entities. As a basis for so-called “Spatial Digital Twins”, 3D point clouds can be defined as a universal digital 3D representation for environments in almost all geoscale ranges. They are characterized by their enormous data volume and lack of semantics, so that their added value is often limited to manual evaluation and interpretation (e.g., by surveying offices). However, a single point of the 3D point cloud does not allow constructing meaningful feature vectors.
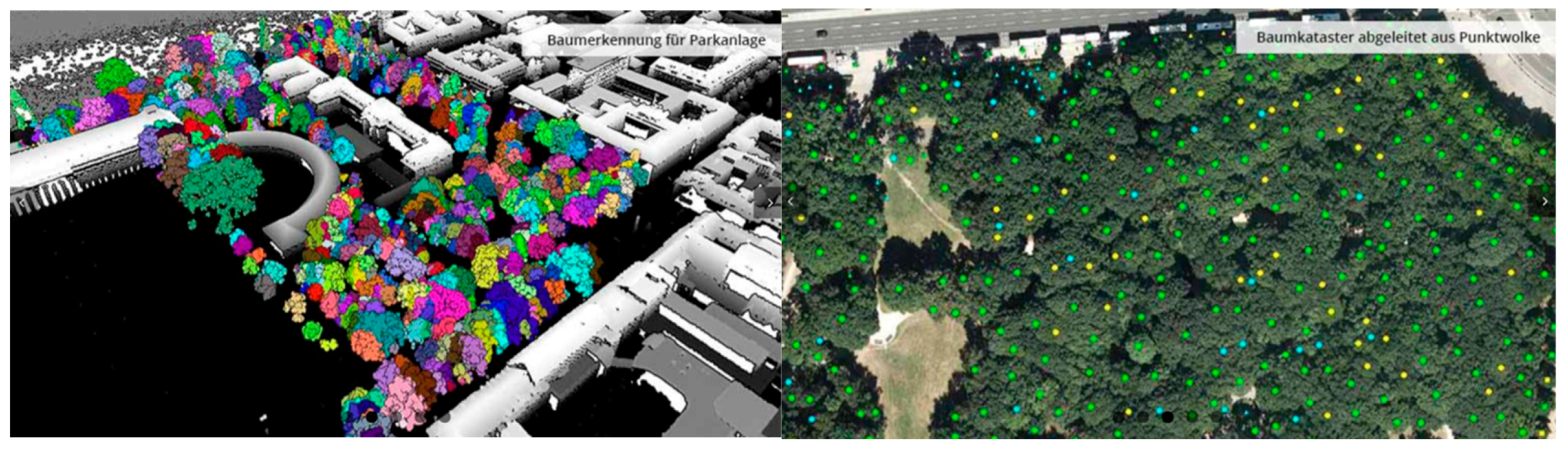
Therefore, geospatial AI algorithms based on ML and DL have been implemented in the German project DEAL to automatically derive vegetation objects from 3D point clouds so that a fully automatic workflow that generates an agricultural DT can be implemented (
Figure 2) [
17]. In such context, geospatial AI offers manifold ways to “distil” object-based information from 3D point clouds, as ML and DL algorithms are able to identify and interpret orchards and tree plantations, including the whole range of what constitutes “trees” and “vegetation” (e.g., “crooked trees”, “flat bushes”, “diseased trees”, etc.).
Furthermore, a knowledge base can be built to answer questions such as the location and main characteristics of orchards and tree plantations (e.g., height, crown set, volume, diameter of trees, flowering characterizing, ripening velocity); the location of other vegetation stocks (e.g., shrubs, bushes, ground level vegetation, green areas); or the detection of differences between inventory data and current state of the orchards and tree plantations.
3.3. AI-Based Irrigation to Optimize Water Use
The European project Internet of Food and Farm 2020 (IoF2020) explores the potential of the Internet of Things (IoT) technologies for the European food and farming industry to make precision farming a reality [
18]. IoT-driven PA enables farmers to optimize their operating tasks to increase crop yields and to minimize costs of inputs such as water, fertilizer, insecticides, and herbicides. The project has implemented the QUHOMA platform [
19], a smart irrigation solution developed as a FIWARE-backed end application (
Figure 3). The irrigation schedule is calculated by a complex event processing (CEP) AI approach based on current algorithms used for irrigation. This approach relies on the daily accumulated sensor data. Therefore, if the data stream were interrupted or inaccurate due to malfunction or failure of the sensors, and/or loss of connection during long-time periods, calculations would deviate from the optimized target.
To overcome these limitations, the project has implemented AI-based predictive analytics that fuse the gathered datasets with other public data sources to train models. As a result, data customized to the field are generated and used as a workaround for the following two scenarios. On the one hand, sensor data streams may become unavailable for a period longer than the estimated tolerance threshold of the CEP algorithm. In this case, accumulated historical data from sensors and previously defined irrigation schedules are used to calculate the irrigation schedule. On the other hand, sensor data may be inaccurate. Thus, predictive analytics based on the historical data can detect anomalies in the values of the sensor data (e.g., when stream data values are not in the estimated acceptable value span) and use this information for the proactive maintenance of the affected sensors.
Real-life irrigation experiments started in 2020 in Cyprus and Slovenia. The objectives and methodology of the pilots are available in [
20]. As an example, an experiment was conducted during a crop session of strawberries (approx. 100 days), planted in a tunnel farm with Clay Loam soil in the coastal Ammochostos district in Cyprus (
Figure 4). In order to perform this experiment, critical values of the climate zone, ETo (reference evapotranspiration), ETc (crop evapotranspiration) and other sensitive irrigation parameters were implemented on the algorithm which handles the smart irrigation schedule on QUHOMA. Several tasks such as quality assessment and cleaning of weather data, or the identification of inputs and their impact on water retention have been completed. Algorithms and models have been calibrated and adjusted for the experiments. The use of the QUHOMA irrigation platform led to a reduction of the 10.88% in water used when compared to the empirical irrigation scheduling program available for the farmer.
3.4. Robotics for Precision Viticulture
Although predicting yield in vineyards represents a challenging task due to high interannual and spatial variability derived from the effects of several factors, quantifying temporal, regional and local variability of vigor and yield of a vineyard can bring several advantages for the entire production chain [
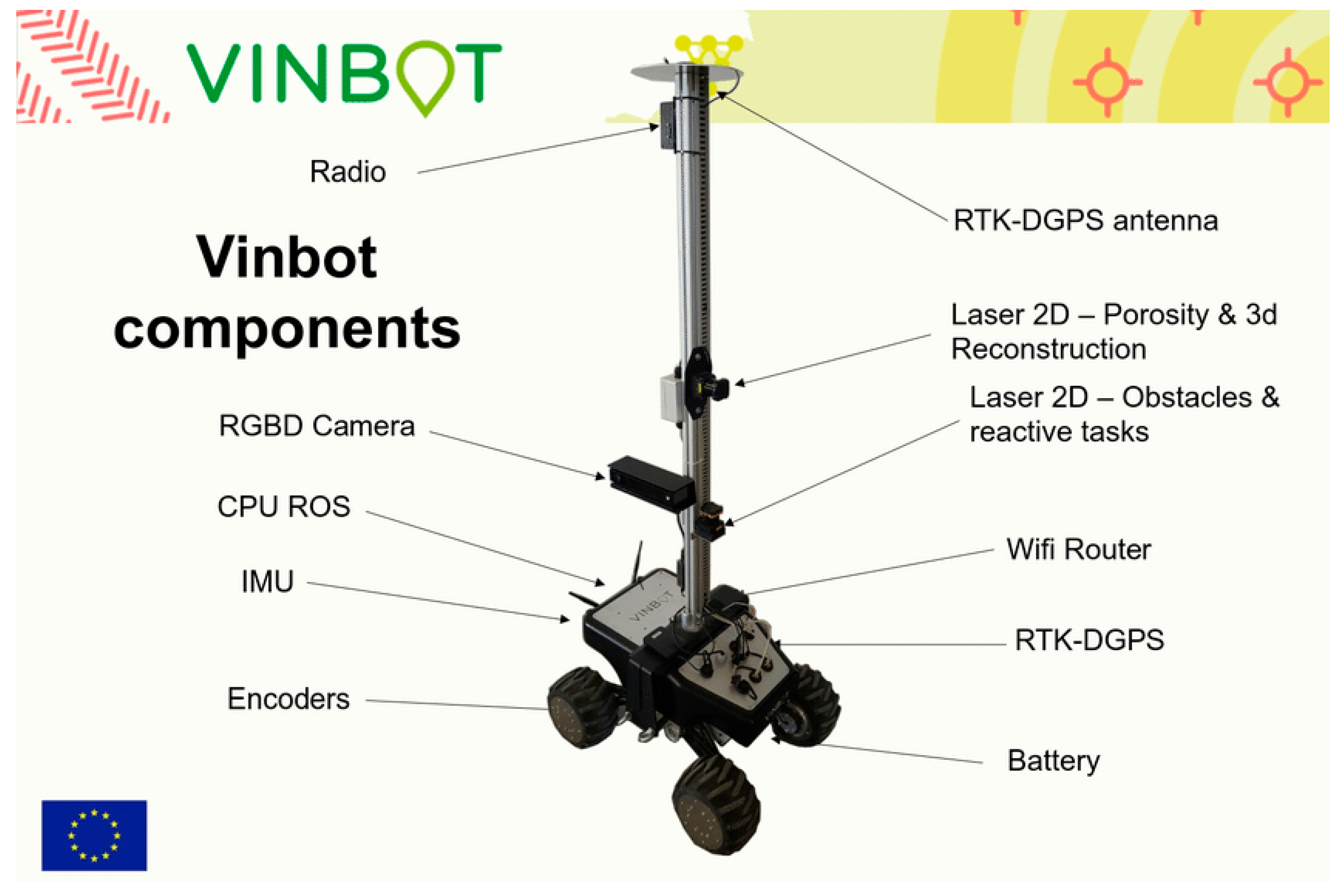
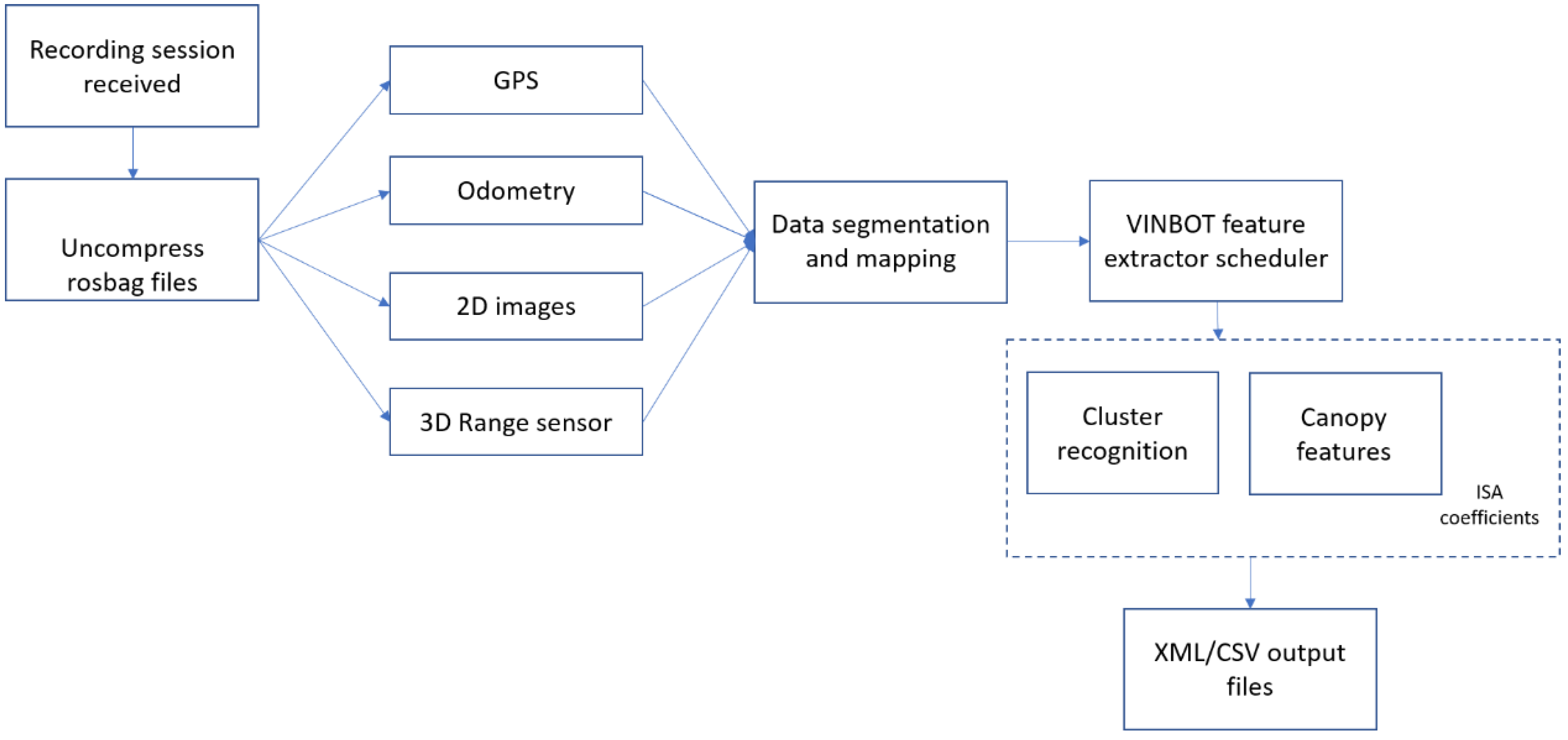
21]. In this context, the EU-funded project VINBOT aimed at developing an all-terrain AGV with a set of sensors capable of capturing and analyzing vineyard images and 3D data by means of cloud computing applications, to obtain yield maps representing the spatial variability of the vineyard plots [
22].
The navigation solution is based on a hybrid reactive/GPS based navigation scheme tested successfully in the vineyard (
Figure 5). On the one hand, the navigation scheme uses a laser range finder and RGBD device to perform reactive row following and obstacle avoidance. On the other hand, the scheme includes other reactive behaviors or GPS waypoint navigation to change from row to row or field to field, thus supporting different levels of automation (
Figure 6).
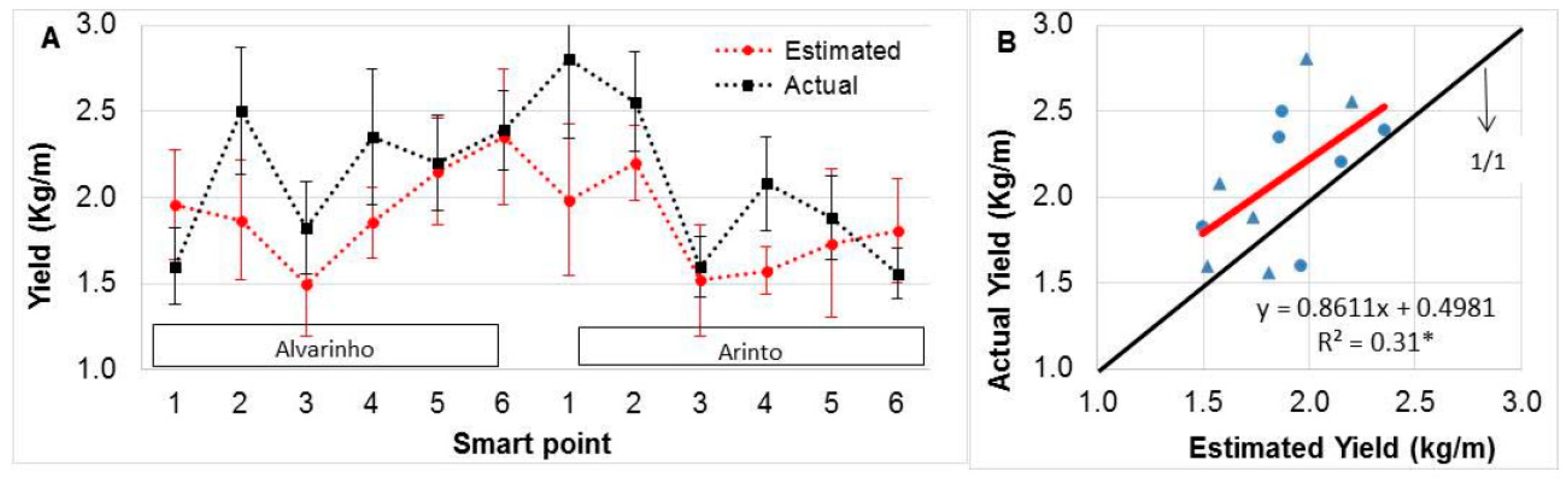
A ground truth evaluation trial was set up in an experimental vineyard in Lisbon with two plots of the white varieties “Alvarinho” and “Arinto”. For each varietal plot, six smart points were selected with 10 contiguous vines each [
23]. During the ripening period of the 2016 season, the vines were manually assessed for canopy dimensions. The VINBOT platform showed an acceptable performance for the automated estimation of canopy features, although results were very dependent on the variety of the grapes (
Figure 7). Moreover, a general underestimation of actual yield based on the combination of image analysis and automatic canopy porosity assessment using a laser range finder has been observed. This result can be attributed to a combined effect of bunch occlusions, low accuracy of grape detection algorithms, and empirical relationships used in final yield calculations. Thus, further research on computer vision algorithms, especially related to hidden bunches by vegetation, is needed to improve the reliability and accuracy of the yield estimations.
3.5. Yield Prediction of Olive Trees Based on Phenotypic Data
Phenology is one important parameter when estimating final yield. Thus, models simulating phenological phases are valuable tools to plan agronomic strategies to optimize production and to assess the impact of climate change. Prediction of flowering and yield, and monitoring phenology, as well as pests and diseases, are important to model the impact of climate change on productivity. In olive trees, a relation between phenological phases and climate variables has been found. Indeed, the occurrence of each phenological stage is based on the accumulation of temperatures above a base temperature calculated on daily (growing degree day—GDD) or hourly (e.g., normal heat hours) time steps up to a fixed amount that depends on crop and variety.
The EU-funded project DEMETER is developing prediction models of the phenological state based on the day of the year (DOY) and GDD using ML algorithms. Such models have been trained and tested with data collected during the monitoring of phenology in olive orchards in Tuscany (Italy) in 2008–2010. For each olive orchard, five olive trees in good health conditions and with homogeneous productivity were selected. The monitoring consisted in visiting the orchards at different time spans during the year, according to the development stage of olive trees in the different seasons [
24].
There are 821 data points in the dataset that belong to 22 different locations with an average of 34 data points per location and 274 data points per year. The dataset was split into training (60%), validation (20%), and test (20%) disjoint sets with the particularity that data were chosen using stratified sampling from the data for the different years.
Four different ML models have been tested (linear regression, CART regression tree, random forest, and neural network). Each model was used twice, one time with linear features and another time with polynomial features up to the fourth degree. A baseline model was used to benchmark the performance of the ML models. For each phenological phase, the average GDD accumulated from the 1st of January until the DOY of observation with a base temperature of 10 °C is the baseline model taken as prediction and benchmark. The olive tree phase is predicted with the GDD, considering whether the GDD cumulated are equal to or greater than the GDD of the baseline model, but lower than the GDD of the next phase.
The different models were evaluated according to the root mean square error (RMSE) metric on the validation set. The model with the lowest RMSE on the validation set was the selected model. For this dataset, random forest with linear features was the best model using GDD and DOY as predictors and rounding the prediction to an integer. The trained models can predict GDD indices with a RMSE of 0.65% on the datasets considered in the validation.
3.6. Simultaneous Localization and Mapping (SLAM) in Agricultural Robotics
Implementations of automatic agricultural robotics or vehicles can be grouped into four categories [
25] which are not independent. As illustrated in
Figure 8, the robot or vehicle needs information about its position, the map of the surroundings for guidance, and the awareness of the presence of trees or moving obstacles in its navigation for safe and successful navigation. This information can be integrated into a SLAM system.
SLAM is a proper solution for occluded GPS (sometimes blocked by dense foliage), crop-relative guidance in open fields, tree-relative guidance in orchards, and more importantly, sensing the crops and its environment [
27]. Various sensors, such as on-board cameras, laser scanners and ultrasonic devices, have been used to extract features from the crops themselves and to determine the location of the robot related to the crop lines or tree rows to auto-steer.
Researchers from the French–German MOVEON project have recently demonstrated a comprehensive breakdown of a visual SLAM system based only on a single camera combined with state-of-the-art multi-view stereo (MVS) algorithms and DL techniques [
27]. It overcomes some of the constraints of current autonomous vehicles or robots working on agricultural environments, such as overly repetitive patterns, the need of very detailed reconstructions, or the abrupt movements caused by uneven roads. The results of the project have been extended towards the agricultural sector. Therefore, experiments have been conducted over the Rosario dataset, which consists of six sequences recorded in a soybean field, captured by forward looking stereo camera, showing real and challenging cases such as highly repetitive scenes, reflection and burned images caused by direct sunlight and rough terrain, among others.
In our approach, the dense point cloud can be generated offline up to real scale (see
Figure 9a), so that it is suitable for tasks like 4D monitoring of the crop and the provision of valuable information to the farmer (e.g., size, disposition, maturity, volume, width and height of the crop). As dense mapping can be achieved also in real-time, the agricultural vehicle or robot can sense the environment to its position and auto-steer. More important, it is also possible to use unsupervised depth estimation using convolutional neural network (CNN) combined with the SLAM system (see
Figure 9b) to tackle the problem of manual labeling of agricultural data, and further boost the performance of real-time dense reconstruction of the agricultural environment.
4. Conclusions
As stated in the report
Harnessing Artificial Intelligence for the Earth, the World Economic Forum (2018) observed that smart agriculture has the potential to “fundamentally change agriculture even more than the 20th century mass farming methods did” [
28]. In particular, PA technologies that deploy AI and advanced robotics are expected to improve decision support at farm level, monitoring conditions and optimizing production to allow farmers to apply the optimal number of inputs for each crop, thereby boosting yields and reducing water use and greenhouse gas emissions.
This paper summarized the most recent research activities in the form of research projects implemented and validated by the authors in several European countries, with the objective of presenting the already achieved results, the current investigations and the still open technical challenges.
First, as low cost and accurate monitoring of crop and soil health has long been key to a successful agricultural economy, two examples of current German projects that deal with the availability of agricultural data and its potential use in DT to provide insights into such complex systems have been described. On the one hand, the large scale NaLamKI initiative will lead the implementation of a dataset by the fusion of sensor data from machines, remote sensing (satellites and drones), soil, weather, and other existing data sources to overcome the current limitation of data availability when implementing advanced AI methodologies for the optimization of agricultural processes. Furthermore, current research challenges for AI such as explainability and the integration of semantic agricultural models will be targeted.
On the other hand, even though still in primary stages, the application of DT in agriculture can bring a technological breakthrough in the near future. In order to provide insights into complex agricultural systems, the DEAL project has implemented geospatial ML and DL algorithms to automatically derive vegetation objects from 3D point clouds, transcending explicit geospatial modeling and overcoming heuristics-based reconstructions and model-based abstractions. Therefore, agricultural DT can be fully automatically implemented to simulate, plan, analyze and improve the way crops are grown so that yields are maximized, stress on water supplies and soil quality is reduced, and agriculture becomes a sustainable practice.
Secondly, AI in agriculture is helping farmers to shift their management strategies to precise cultivation for higher crop yield and better quality while using fewer resources. On the one hand, AI applications in agriculture such as for irrigation, weeding or spraying, save the excess use of water, pesticides and herbicides while maintaining the fertility of the soil to improve both productivity and quality of produced goods. In this way, the QUHOMA irrigation platform developed within the IoF2020 project has been extended with AI-based predictive analytics that fuse the gathered datasets with other public data sources to train models when data stream is interrupted or inaccurate due to malfunction or failure of the sensors, and/or loss of connection during long time periods. Real-life experiments conducted in strawberry crops in Cyprus led to a significant reduction (from 6 to 11% less) in water used when compared to the empirical irrigation scheduling program available for the farmer. The platform is currently being adapted to groves of olives in order to optimize their irrigation using the minimum number of sensors.On the other hand, while many analytical models have been developed to plan agronomic strategies to optimize production, AI leads current research since it enables to take into account complex multidimensional holistic approaches. This paper describes two examples of the use of ML techniques for the yield prediction, both in the automated estimation of canopy features of an experimental vineyard in Lisbon and in olive tree plantations based on phenotypic data.
First, the VINBOT project aims at predicting yield in vineyards using an all-terrain AGV with a set of sensors capable of capturing and analyzing vineyard images and 3D data by means of cloud computing applications. Although the platform showed an acceptable performance, with a better accuracy within the “Alvarinho” plot than in the “Arinto” one, a general underestimation of actual yield for both plots was observed. This result can be attributed to a combined effect of bunch occlusions, low accuracy of grape detection algorithms, and empirical relationships used in final yield calculations. Thus, further research on computer vision algorithms, especially related to hidden bunches by vegetation, is needed to improve the reliability and accuracy of the yield estimations.
Secondly, prediction models of the phenological state for olive trees have been developed within the DEMETER project, as models simulating phenological phases are valuable tools to plan agronomic strategies to optimize production and assess the impact of climate change. Four different ML models have been tested and compared according to the RMSE. The use of low base temperature resulted in better model prediction.
Finally, robotics agriculture will not only make agriculture more precise but also a sustainable business, as it is undeniable that the average age of farmers is rising, and younger generations are less likely to take their place causing concern about labor shortages in the agricultural sector. The MOVEON project has demonstrated a comprehensive breakdown of a visual SLAM system based only on a single camera combined with state-of-the-art multi-view stereo (MVS) algorithms and DL techniques, overcoming some of the constraints of current autonomous vehicles or robots working on agricultural environments, such as overly repetitive patterns, the need of very detailed reconstructions, or the abrupt movements caused by uneven roads.
5. Future Work
A key goal of PA is to retrieve accurate information about the spatial and temporal variability of soil and plant parameters, with the aim to reduce inputs such as fertilizers, seeds, water or pesticides. This allows better quantitative assessment of how much of a specific input is needed, so that agriculture has a lighter impact on the environment and at the same time, “produces more with less” in the same area. However, current plant sampling techniques are time-consuming and involve intensive human labor and costs, which leads to significant limitations on the frequency and the number of samples that can be collected to quantify the experimental error among treatment repetitions.
New concepts based on autonomous and intelligent robots for plant and soil sample retrieval should be introduced to obtain more and better plant data in a shorter time with less human labor. Therefore, groups of heterogeneous intelligent and autonomous agricultural vehicles (UAVs) and ground robots (UGVs) capable of approaching and recognizing, manipulating, sampling and collecting, transporting and delivering soil and plant samples required for inspection should be developed. High-quality sampling data gathered by robots will allow the development of novel DDS, which in turn will facilitate decisions on exactly how, where and in which amount inputs should be used to improve production and to use resources sustainably. The concept, once applied, will greatly increase precision and quality in farming processes.
Furthermore, future extensions of this work will include the implementation of AI algorithms for the smart farming concept, including effective livestock management. For example, automated video monitoring of animal behavior to detect events like calving, heat periods or other physiological phenomena, is of great interest to help farmers and breeders improve efficiency in their professional activity. Advantages of an automated solution are to provide a 24 h/7 days assistance, to allow anticipating alerts, to facilitate reporting, to ensure traceability and all this to alleviate the burden for the farmers and attend to the health of the animals. The livestock monitoring will be progressively enriched with advanced functionalities based on IA and sensing that will be kept noninvasive for animals.



 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}