
The Airflow Field Characteristics of the Unmanned Agricultural Aerial System on Oilseed Rape (Brassica napus) Canopy for Supplementary Pollination

 ,
, 

Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Site, OSR Characters and Weather Conditions
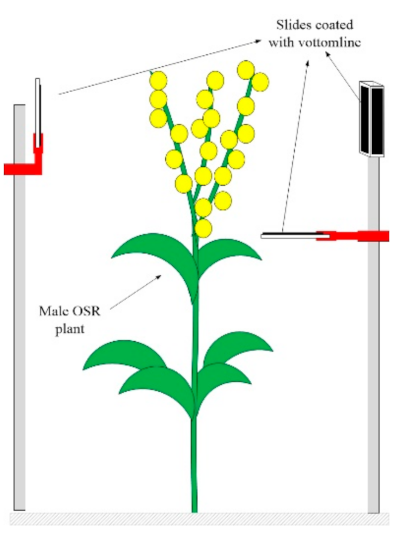
2.2. UAAS and Experimental Materials
2.3. Experimental Treatments
2.3.1. Experiment Design
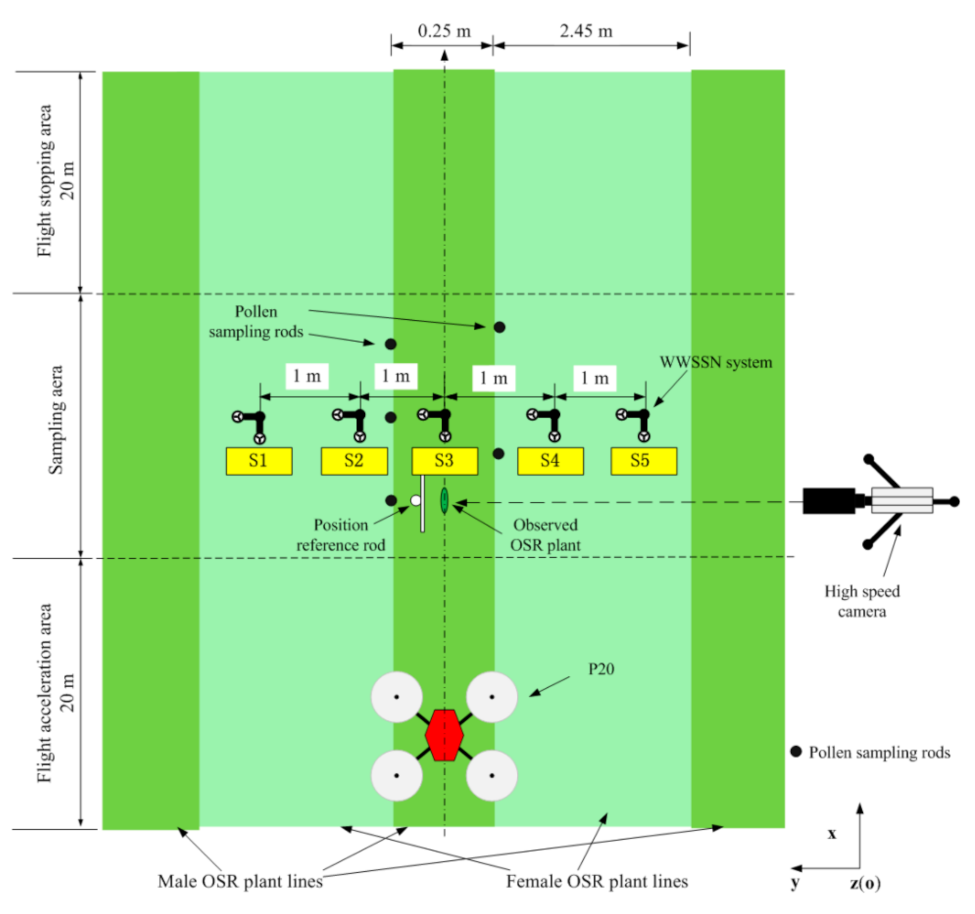
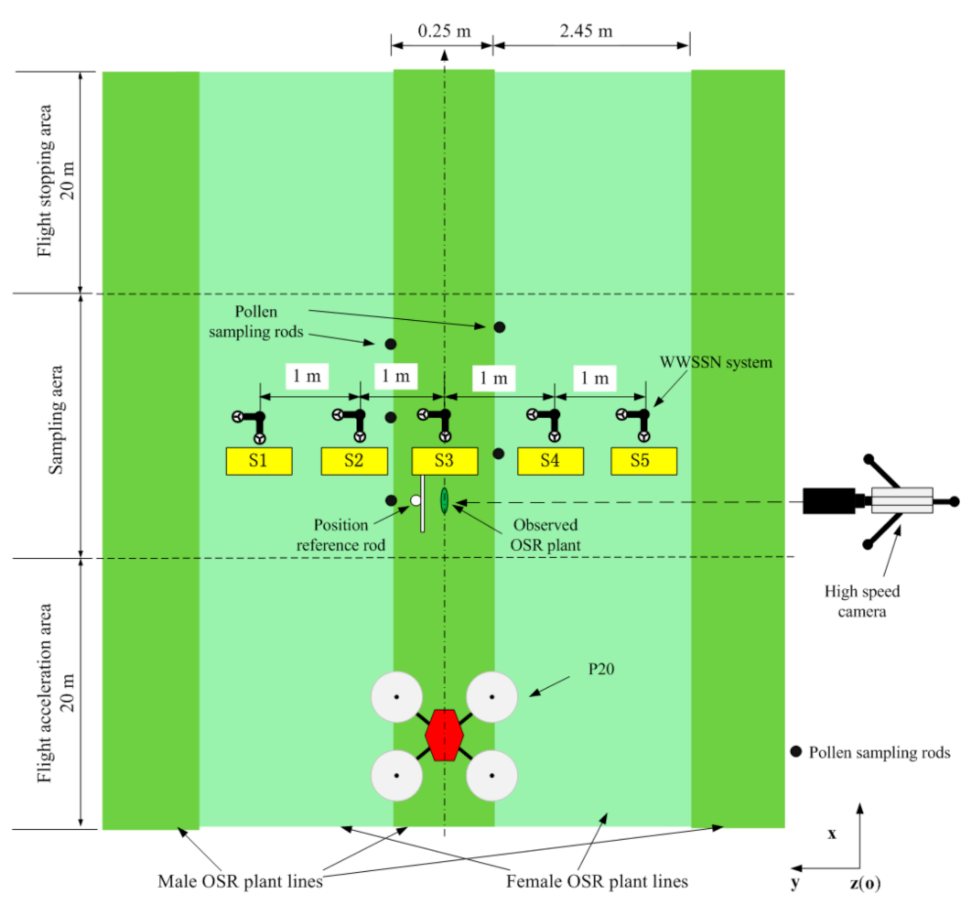
2.3.2. Sampling Point Arrangements
2.4. Data Processing
3. Results
3.1. Airflow Wind Data Statistics and Analysis
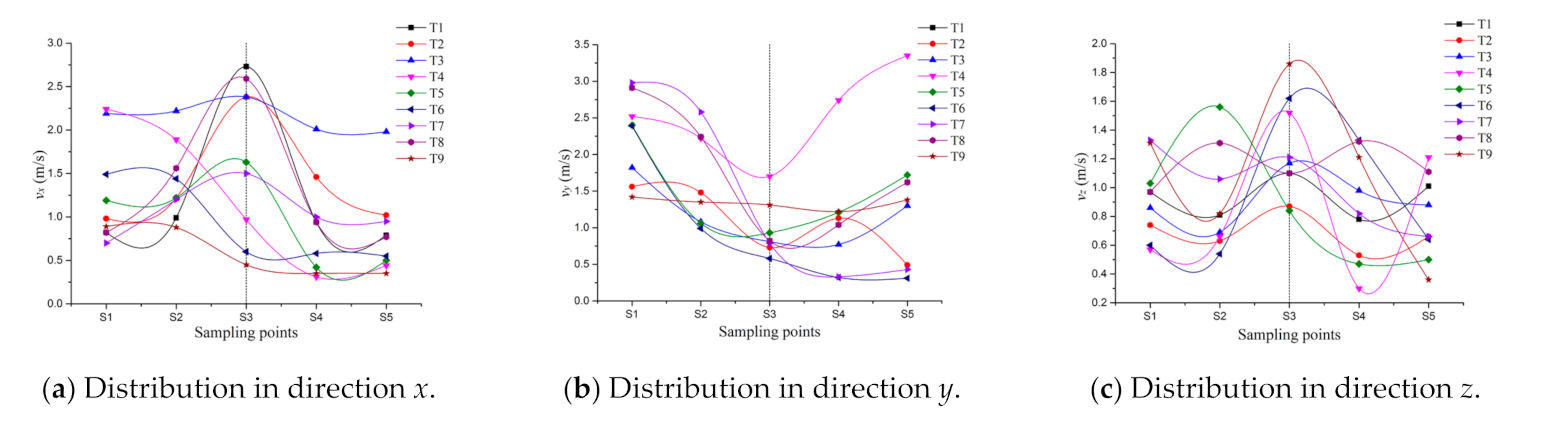
3.1.1. The Airflow Wind Velocity Distributions
3.1.2. Wind Velocity
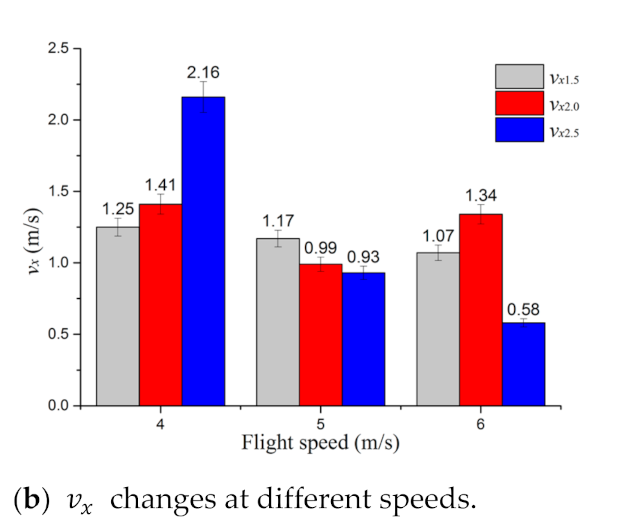
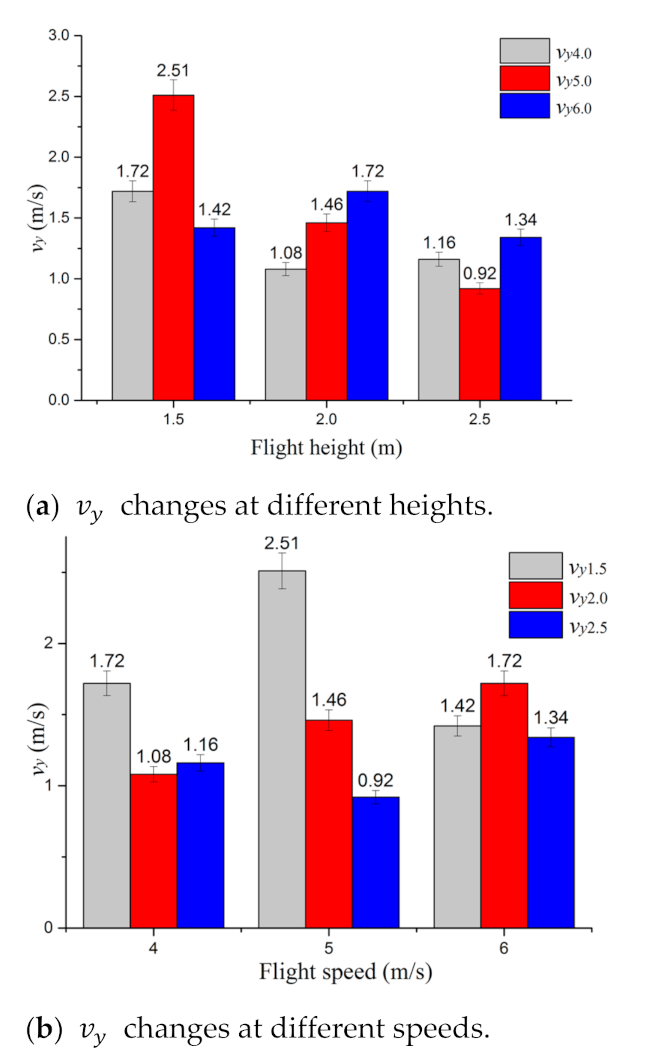
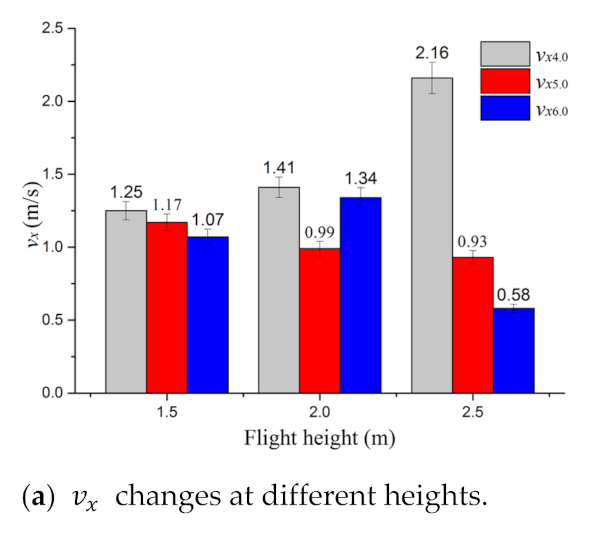
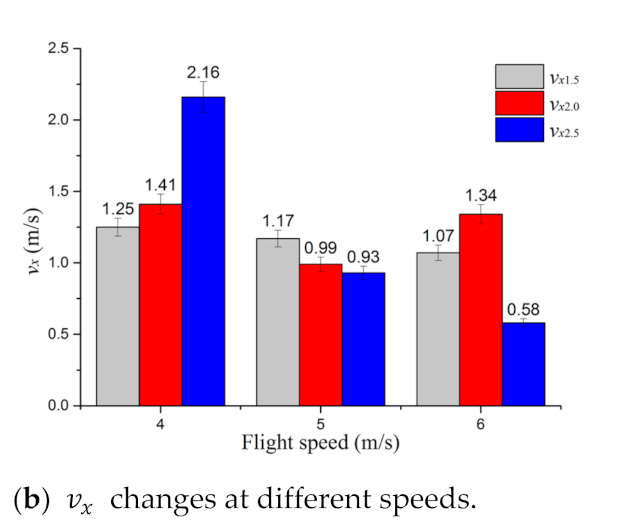
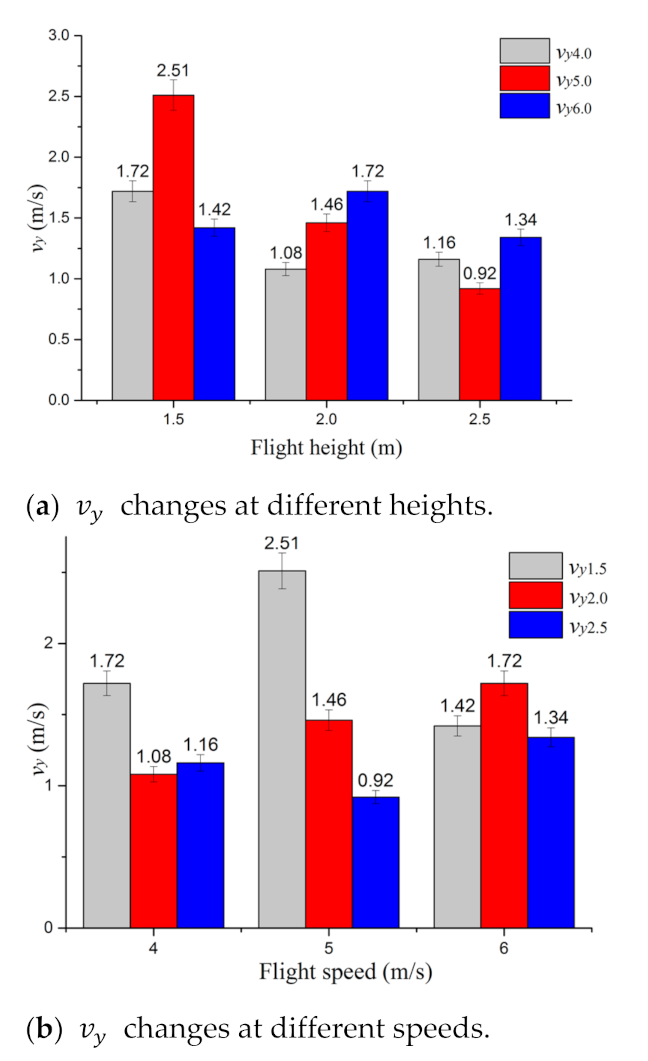
3.1.3. Effect of FS and FH on Airflow Velocity
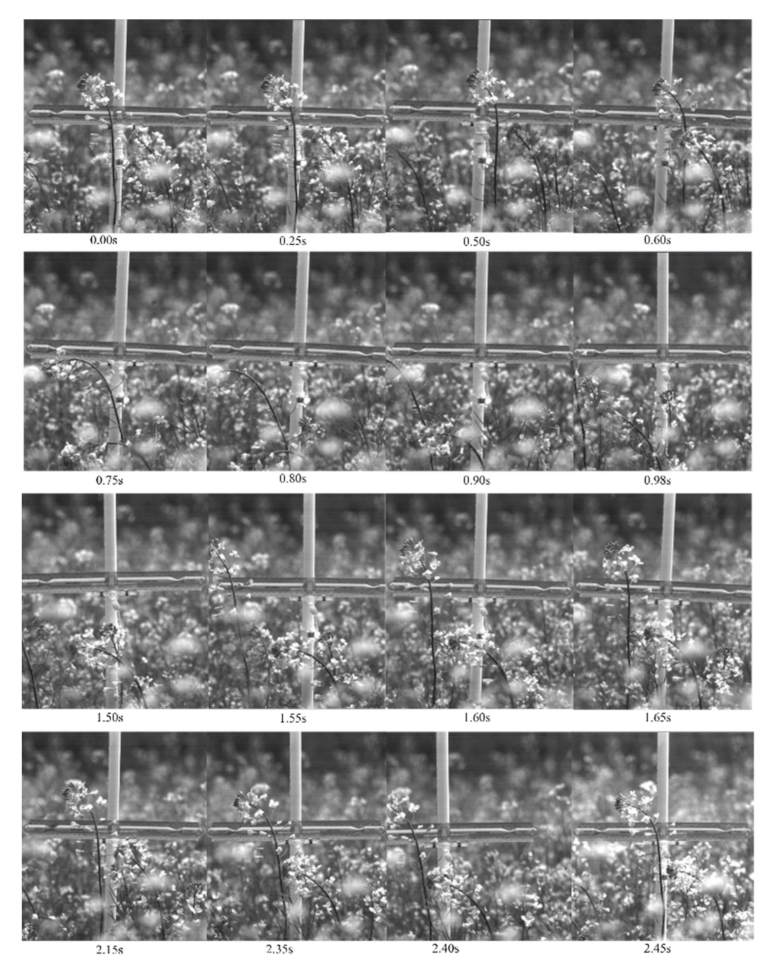
3.2. The OSR Plant Swing Capture
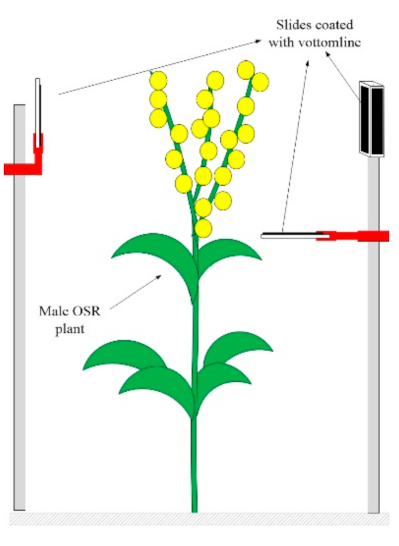
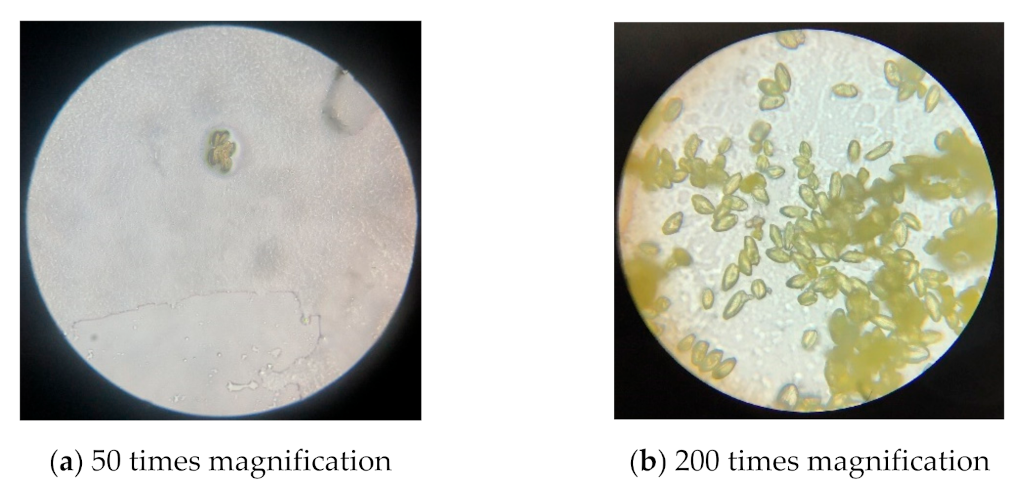
3.3. The OSR Pollen Sampling
4. Discussion
5. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Q.; Ren, T.; Zhang, Y.; Li, X.; Gong, R.; Liu, S.; Fan, X.; Lu, J. Evaluating the application of controlled release urea for oilseed rape on Brassica napus in a regional scale: The optimal usage, yield and nitrogen use efficiency responses. Ind. Crop. Prod. 2019, 140, 111560. [Google Scholar] [CrossRef]
- Lu, J. Scientifc Fertilization Technology for Oilseed Rape; God Shield Press: Beijing, China, 2010. [Google Scholar]
- Delgado, M.; Felix, M.; Bengoechea, C. Development of bioplastic materials: From rapeseed oil industry by products toadded-value biodegradable biocomposite materials. Ind. Crop. Prod. 2018, 125, 401–407. [Google Scholar] [CrossRef]
- Szubert, K. Synthesis of organofunctional silane from rapeseed oil and its application as a coating material. Cellulose 2018, 25, 6269–6278. [Google Scholar] [CrossRef] [Green Version]
- Shim, Y.Y.; Falk, K.; Ratanapariyanuch, K.; Reaney, M.J.T. Food and fuel from Canadian oilseed grains: Biorefinery production may optimize both resources. Eur. J. Lipid Sci. Technol. 2017, 119, 1438–7697. [Google Scholar] [CrossRef]
- Cong, R.; Wang, Y.; Li, X.; Ren, T.; Lu, J. Differential Responses of Seed Yield and Yield Components to Nutrient Deficiency Between Direct Sown and Transplanted Winter Oilseed Rape. Int. J. Plant Prod. 2019, 14, 77–92. [Google Scholar] [CrossRef]
- Vollmann, J.; Rajcan, I. Oilseed Rape in Oil Crops; Springer: New York, NY, USA, 2009; pp. 91–126. [Google Scholar]
- Requier, F.; Odoux, J.-F.; Tamic, T.; Moreau, N.; Henry, M.; Decourtye, A.; Bretagnolle, V. Honey bee diet in intensive farmland habitats reveals an unexpectedly high flower richness and a major role of weeds. Ecol. Appl. 2015, 25, 881–890. [Google Scholar] [CrossRef] [Green Version]
- Allen-Wardell, G.; Bernhardt, P.; Bitner, R.; Burquez, A.; Buchmann, S.; Cane, J.; Cox, P.A.; Dalton, V.; Feinsinger, P.; Ingram, M.; et al. The potential consequences of pollinator declines on the conservation of biodi-versity and stability of food crop yields. Conserv. Biol. 1998, 12, 8–17. [Google Scholar]
- Qing, Y.; Li, Y.; Xu, L.; Ma, Z. Screen oilseed rape (Brassica napus) suitable for low-loss mechanized harvesting. Agriculture 2021, 11, 504. [Google Scholar] [CrossRef]
- Bommarco, R.; Kleijn, D.; Potts, S.G. Ecological intensification: Harnessing ecosystem services for food security. Trends Ecol. Evol. 2013, 28, 230–238. [Google Scholar] [CrossRef]
- Klein, A.-M.; Vaissière, B.E.; Cane, J.H.; Steffan-Dewenter, I.; Cunningham, S.A.; Kremen, C.; Tscharntke, T. Importance of pollinators in changing landscapes for world crops. Proc. R. Soc. B Biol. Sci. 2006, 274, 303–313. [Google Scholar] [CrossRef] [Green Version]
- Kremen, C.; Williams, N.M.; Aizen, M.A.; Gemmill-Herren, B.; LeBuhn, G.; Minckley, R.; Packer, L.; Potts, S.G.; Roulston, T.; Steffan-Dewenter, I.; et al. Pollination and other ecosystem services produced by mobile organisms: A conceptual framework for the ef-fects of land-use change. Ecol. Lett. 2007, 10, 299–314. [Google Scholar] [CrossRef] [PubMed]
- Aizen, M.A.; Harder, L.D. The global stock of domesticated honeybees is growing slower than agricultural demand for pollination. Curr. Biol. 2009, 19, 915–918. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cordeiro, G.D.; Liporoni, R.; Caetano, C.A.; Krug, C.; Martínez-Martínez, C.A.; Martins, H.O.J.; Cardoso, R.K.O.A.; Araujo, F.F.; Araújo, P.C.S.; Oliveira, R.; et al. Nocturnal Bees as Crop Pollinators. Agronomy 2021, 11, 1014. [Google Scholar] [CrossRef]
- Blackstock, T.H.; Rimes, C.A.; Stevens, D.P.; Jefferson, R.G.; Robertson, H.J.; Mackintosh, J.; Hopkins, J.J. Hopkins the extent of semi-natural grassland communities in Lowland England and Wales: A review of conservation surveys 1978–1996. Grass Forage Sci. 1999, 54, 1–18. [Google Scholar] [CrossRef]
- Robinson, R.A.; Sutherland, W.J. Post-war changes in arable farming and biodiversity in Great Britain. J. Appl. Ecol. 2002, 39, 157–176. [Google Scholar] [CrossRef] [Green Version]
- Brittain, C.A.; Vighi, M.; Bommarco, R.; Settele, J.; Potts, S.G. Impacts of a pesticide on pollinator species richness at different spatial scales. Basic Appl. Ecol. 2010, 11, 106–115. [Google Scholar] [CrossRef]
- Halm, M.-P.; Rortais, A.; Arnold, G.; Touffet-Briens, F. Modes of honeybees exposure to systemic insecticides: Estimated amounts of contaminated pollen and nectar consumed by different categories of bees. Apidologie 2005, 36, 71–83. [Google Scholar] [CrossRef] [Green Version]
- Potts, S.G.; Imperatriz-Fonseca, V.; Ngo, H.T.; Aizen, M.A.; Biesmeijer, J.C.; Breeze, T.D.; Dicks, L.V.; Garibaldi, L.A.; Hill, R.; Settele, J.; et al. Safeguarding pollinators and their values to human well-being. Nature 2016, 540, 220–229. [Google Scholar] [CrossRef]
- Potts, S.G.; Biesmeijer, J.C.; Kremen, C.; Neumann, P.; Schweiger, O.; Kunin, W.E. Global pollinator declines: Trends, impacts and drivers. Trends Ecol. Evol. 2010, 25, 345–353. [Google Scholar] [CrossRef]
- Goulson, D.; Nicholls, E.; Botías, C.; Rotheray, E.L. Bee declines driven by combined stress from parasites, pesticides, and lack of flowers. Science 2015, 347, 1255957. [Google Scholar] [CrossRef]
- Fairhurst, S.M.; Cole, L.J.; Kocarkova, T.; Jones-Morris, C.; Evans, A.; Jackson, G. Agronomic Traits in Oilseed Rape (Brassica napus) Can Predict Foraging Resources for Insect Pollinators. Agronomy 2021, 11, 440. [Google Scholar] [CrossRef]
- Garibaldi, L.A.; Aizen, M.A.; Klein, A.M.; Cunningham, S.A.; Harder, L.D. Global growth and stability of agricultural yield decrease with pollinator dependence. Proc. Natl. Acad. Sci. USA 2011, 108, 5909–5914. [Google Scholar] [CrossRef] [Green Version]
- Breeze, T.D.; Boreux, V.; Cole, L.; Dicks, L.; Klein, A.; Pufal, G.; Balzan, M.V.; Bevk, D.; Bortolotti, L.; Petanidou, T.; et al. Linking farmer and beekeeper preferences with ecological knowledge to improve crop pollination. People Nat. 2019, 1, 562–572. [Google Scholar] [CrossRef]
- Lan, Y.; Wang, G. Development situation and prospects of China’s crop protection UAV industry. Agric. Eng. Technol. 2018, 38, 17–27. [Google Scholar]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Zhang, S.; Xue, X.; Sun, T.; Gu, W.; Zhang, C.; Peng, B.; Sun, X. Evaluation and comparison of two typical kinds UAAS based on the first industry standard of China. Int. Agric. Eng. J. 2020, 29, 331–340. [Google Scholar]
- Zhang, S.; Xue, X.; Chen, C.; Sun, Z.; Sun, T. Development of a low-cost quadrotor UAV based on ADRC for agricultural remote sensing. Int. J. Agric. Biol. Eng. 2019, 12, 82–87. [Google Scholar] [CrossRef]
- Wang, X.; Wang, M.; Wang, S.; Wu, Y. Extraction of vegetation information from visible unmanned aerial vehicle images. Trans. Chin. Soc. Agric. Eng. 2015, 31, 152–159. [Google Scholar]
- Zhang, S.; Qiu, B.; Xue, X.; Sun, T.; Peng, B. Parameters optimization of crop protection UAS based on the first industry standard of China. Int. J. Agric. Biol. Eng. 2020, 13, 29–35. [Google Scholar] [CrossRef]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, S.; Luo, C.; Li, W.; Liao, Y. Design and Experimentation of an Aerial Seeding System for Rapeseed Based on an Air-Assisted Centralized Metering Device and a Multi-Rotor Crop Protection UAV. Appl. Sci. 2020, 10, 8854. [Google Scholar] [CrossRef]
- Cai, G.; Dias, J.; Seneviratne, L. A Survey of Small-Scale Unmanned Aerial Vehicles: Recent Advances and Future Development Trends. Unmanned Syst. 2014, 02, 175–199. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Lei, X.; Tang, Y.; Chang, Y.; Lv, X. Pear tree spray pollination technology based on multi-rotor UAV. Jiangsu Agric. Sci. 2020, 48, 210–214. [Google Scholar]
- Wu, H. Research of Effection Hybrid Rice Seed Pollination with Unmanned Helicopter. Master’s Thesis, Hunan Agriculture University, Changsha, China, 6 May 2014. [Google Scholar]
- Liu, A.; Zhang, H.; Liao, C.; Zhang, Q.; Xiao, C.; He, J.; Zhang, J.; He, Y.; Li, J.; Luo, X. Effects of supplementary pollination by single-rotor agricultural unmanned aerial vehicle in hybrid rice seed production. Agric. Sci. Technol. 2017, 18, 543–547, 552. [Google Scholar]
- Kong, D.; Zhao, Y.; Hui, X.; Xu, L.; Wang, X. Method and exploration of crop protection UAV assisting pollination to increase corn yield. China Agric. Technol. Ext. 2019, 35, 32–33. [Google Scholar]
- Li, J.; Zhou, Z.; Lan, Y.; Hu, L.; Zang, Y.; Liu, A.; Zhang, T. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation. Trans. Chin. Soc. Agric. Eng. 2015, 31, 77–86. [Google Scholar]
- Wang, P.; Hu, L.; Zhou, Z.; Yang, W.; Liu, A.; Luo, X.; Xue, X.; He, J.; Yan, Y. Wind field measurement for supplementary pollination in hybrid rice breeding using unmanned gasoline engine single-rotor helicopter. Trans. Chin. Soc. Agric. Eng. 2013, 29, 54–61. [Google Scholar]
- Tian, Z.; Xue, X.; Xu, Y.; Yang, F.; Sun, Z. Effect of plant protection UAVs downwash on crop canopy. Trans. Chin. Soc. Agric. Eng. 2021, 52, 40–48. [Google Scholar]
- Shi, Q.; Pan, Y.; He, B.; Zhu, H.; Liu, D.; Shen, B.; Mao, H. The Airflow Field Characteristics of UAV Flight in a Greenhouse. Agriculture 2021, 11, 634. [Google Scholar] [CrossRef]
- Announcement No. 2566 of the Ministry of Agriculture and Rural Affairs of the People’s Republic of China. Available online: http://www.moa.gov.cn/govpublic/nybzzj1/201710/t20171011_5837449.htm (accessed on 31 August 2021).
- Yangguang 131. Available online: http://ocri.caas.cn/cgzh/194886.htm (accessed on 31 August 2021).
- Wang, G.; Lan, Y.; Qi, H.; Chen, P.; Hewitt, A.J.; Han, Y.; Yubin, L. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manag. Sci. 2019, 75, 1546–1555. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Yang, S.; Liu, X.; Wang, J.; Norton, T.; Chen, J.; Tan, Y. The computational fluid dynamic modeling of downwash flow field for a six-rotor UAV. Front. Agric. Sci. Eng. 2018, 5, 159–167. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Gu, W.; Qiu, B.; Xue, X.; Zhou, L. Design and experiment of a hydraulic lifting wind field test platform for crop protection UAS. Int. J. Agric. Biol. Eng. 2021, 14, 166–174. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Time | Growth Period | OSR Plant Mean Height (cm) | Width of OSR Plant Line (m) | Row Proportion of Male to Female | Mean Wind Speed (m/s) | Mean Temperature (°C) | Mean Relative Humidity (%) |
|---|---|---|---|---|---|---|---|
| 3–9 July 2019 | Early stage of blooming | 160 ± 10 (male) 150 ± 10 (female) | 0.25 (male) 2.45 (female) | 2:10 | 0.78 ± 0.20 | 25.85 ± 0.30 | 35.1 ± 1.55 |
| Items | Parameters |
|---|---|
| UAAS size | 1262 mm × 1250 mm × 490 mm |
| Rotor diameter | 36 cm |
| Battery capacity | 18,000 mAh × 2 |
| FS | 3–7 m/s |
| FH | 0.5–3 m |
| Treatments | FS | FH |
|---|---|---|
| T1 | 4.0 m/s | 1.5 m |
| T2 | 4.0 m/s | 2.0 m |
| T3 | 4.0 m/s | 2.5 m |
| T4 | 5.0 m/s | 1.5 m |
| T5 | 5.0 m/s | 2.0 m |
| T6 | 5.0 m/s | 2.5 m |
| T7 | 6.0 m/s | 1.5 m |
| T8 | 6.0 m/s | 2.0 m |
| T9 | 6.0 m/s | 2.5 m |
| Treatments | Wind Velocity | S1 | S2 | S3 | S4 | S5 |
|---|---|---|---|---|---|---|
| T1 | (m/s) | 0.82 | 0.99 | 2.73 | 0.94 | 0.79 |
| (m/s) | 2.91 | 2.24 | 0.82 | 1.04 | 1.62 | |
| (m/s) | 0.97 | 0.81 | 1.10 | 0.78 | 1.01 | |
| T2 | (m/s) | 0.98 | 1.22 | 2.38 | 1.46 | 1.02 |
| (m/s) | 1.56 | 1.48 | 0.73 | 1.13 | 0.49 | |
| (m/s) | 0.74 | 0.63 | 0.87 | 0.53 | 0.66 | |
| T3 | (m/s) | 2.19 | 2.22 | 2.38 | 2.01 | 1.98 |
| (m/s) | 1.82 | 1.08 | 0.81 | 0.77 | 1.30 | |
| (m/s) | 0.86 | 0.69 | 1.17 | 0.98 | 0.88 | |
| T4 | (m/s) | 2.24 | 1.89 | 0.97 | 0.31 | 0.44 |
| (m/s) | 2.52 | 2.22 | 1.70 | 2.74 | 3.35 | |
| (m/s) | 0.57 | 0.66 | 1.52 | 0.30 | 1.21 | |
| T5 | (m/s) | 1.19 | 1.22 | 1.63 | 0.42 | 0.50 |
| (m/s) | 2.40 | 1.06 | 0.93 | 1.21 | 1.72 | |
| (m/s) | 1.03 | 1.56 | 0.84 | 0.47 | 0.50 | |
| T6 | (m/s) | 1.49 | 1.44 | 0.60 | 0.58 | 0.55 |
| (m/s) | 2.39 | 0.99 | 0.58 | 0.32 | 0.31 | |
| (m/s) | 0.60 | 0.54 | 1.62 | 1.33 | 0.64 | |
| T7 | (m/s) | 0.70 | 1.20 | 1.50 | 1.00 | 0.95 |
| (m/s) | 2.98 | 2.58 | 0.79 | 0.33 | 0.43 | |
| (m/s) | 1.33 | 1.06 | 1.21 | 0.82 | 0.66 | |
| T8 | (m/s) | 0.82 | 1.56 | 2.59 | 0.94 | 0.77 |
| (m/s) | 2.91 | 2.24 | 0.82 | 1.04 | 1.62 | |
| (m/s) | 0.97 | 1.31 | 1.10 | 1.32 | 1.11 | |
| T9 | (m/s) | 0.89 | 0.88 | 0.45 | 0.35 | 0.35 |
| (m/s) | 1.42 | 1.35 | 1.31 | 1.22 | 1.38 | |
| (m/s) | 1.31 | 0.82 | 1.86 | 0.37 | 0.36 |
| Treatments | |||
|---|---|---|---|
| T1 | 1.25 m/s | 1.72 m/s | 0.93 m/s |
| T2 | 1.41 m/s | 1.08 m/s | 0.69 m/s |
| T3 | 2.16 m/s | 1.16 m/s | 0.92 m/s |
| T4 | 1.17 m/s | 2.51 m/s | 0.85 m/s |
| T5 | 0.99 m/s | 1.46 m/s | 0.88 m/s |
| T6 | 0.93 m/s | 0.92 m/s | 0.95 m/s |
| T7 | 1.07 m/s | 1.42 m/s | 1.02 m/s |
| T8 | 1.34 m/s | 1.72 m/s | 1.16 m/s |
| T9 | 0.58 m/s | 1.34 m/s | 0.94 m/s |
| Source of Variance | df | F | p Value | Significance |
|---|---|---|---|---|
| FS | 2 | 0.35 | 0.70804 | NS |
| FH | 2 | 29.05 | 2.31752 × 10−6 | ** |
| FS × FH | 4 | 6.87 | 0.00153 | * |
| Source of Variance | df | F | p Value | Significance |
|---|---|---|---|---|
| FS | 2 | 91.28 | 3.77829 × 10−10 | ** |
| FH | 2 | 10.44 | 0.00098 | ** |
| FS × FH | 4 | 43.78 | 4.86608 × 10−9 | ** |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Cai, C.; Li, J.; Sun, T.; Liu, X.; Tian, Y.; Xue, X. The Airflow Field Characteristics of the Unmanned Agricultural Aerial System on Oilseed Rape (Brassica napus) Canopy for Supplementary Pollination. Agronomy 2021, 11, 2035. https://doi.org/10.3390/agronomy11102035
Zhang S, Cai C, Li J, Sun T, Liu X, Tian Y, Xue X. The Airflow Field Characteristics of the Unmanned Agricultural Aerial System on Oilseed Rape (Brassica napus) Canopy for Supplementary Pollination. Agronomy. 2021; 11(10):2035. https://doi.org/10.3390/agronomy11102035
Chicago/Turabian StyleZhang, Songchao, Chen Cai, Jiqiang Li, Tao Sun, Xiaoming Liu, Yong Tian, and Xinyu Xue. 2021. "The Airflow Field Characteristics of the Unmanned Agricultural Aerial System on Oilseed Rape (Brassica napus) Canopy for Supplementary Pollination" Agronomy 11, no. 10: 2035. https://doi.org/10.3390/agronomy11102035
APA StyleZhang, S., Cai, C., Li, J., Sun, T., Liu, X., Tian, Y., & Xue, X. (2021). The Airflow Field Characteristics of the Unmanned Agricultural Aerial System on Oilseed Rape (Brassica napus) Canopy for Supplementary Pollination. Agronomy, 11(10), 2035. https://doi.org/10.3390/agronomy11102035