Optimization of Main Link Lengths of Transplanting Device of Semi-Automatic Vegetable Transplanter




Abstract
:1. Introduction
2. Materials and Methods
2.1. Semi-Automatic Vegetable Transplanter
2.2. Structure of the Transplanting Device
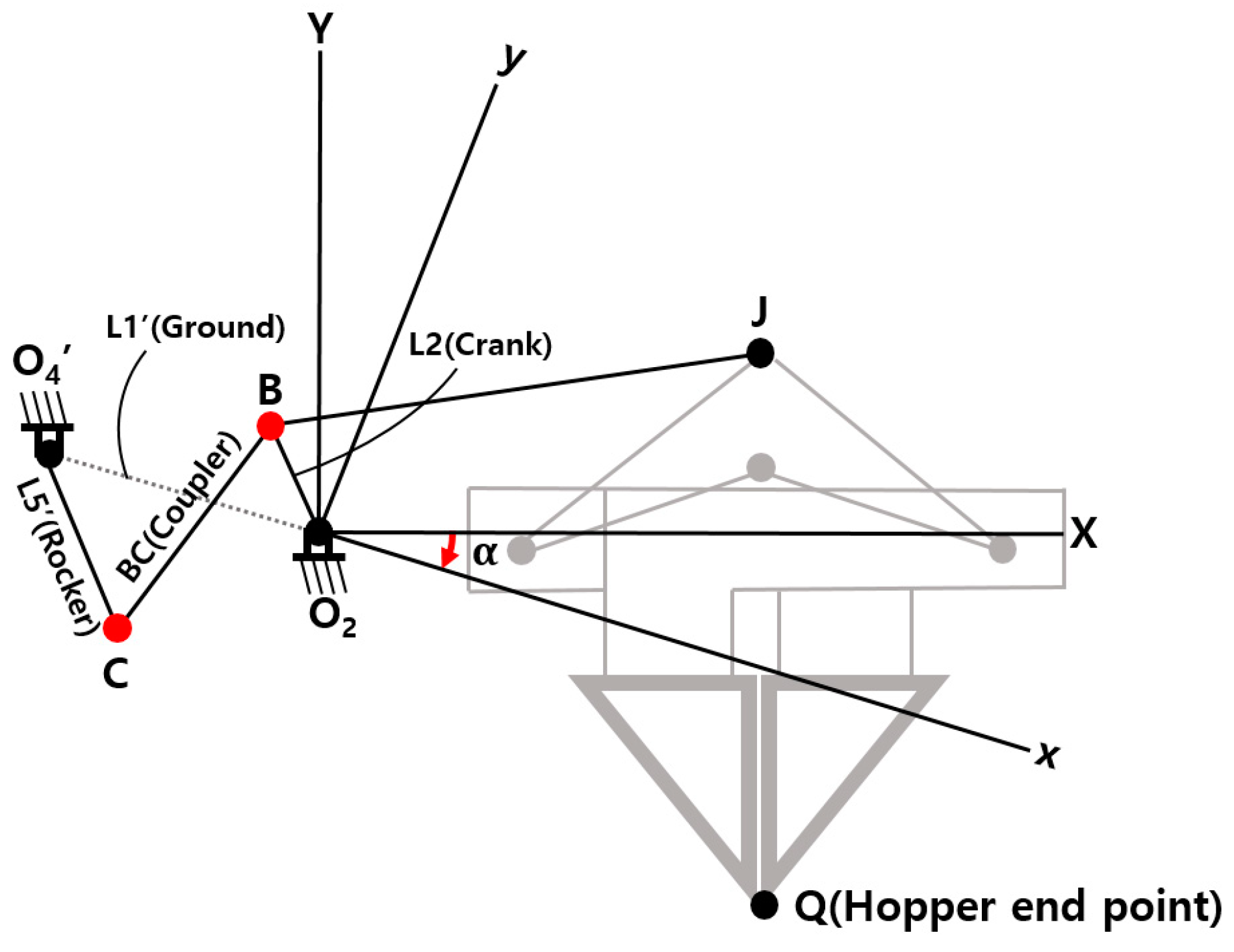
2.3. Kinematic Analysis to Determine Theoretical Planting Trajectory
- = vector of link (crank);
- = vector of link (coupler);
- = vector of link (rocker);
- = vector of link (ground).
- = position of joint J in the local coordinate system;
- = position of joint B in the local coordinate system;
- = position of joint J relative to joint B in the local coordinate system.
- = x-axis position of joint B in the local coordinate system;
- = y-axis position of joint B in the local coordinate system;
- a = length of (crank).
- = x-axis position of joint J with respect to B in the local coordinate system;
- = y-axis position of joint J with respect to B in the local coordinate system;
- p = Length of .
- = x-axis position of joint J in the local coordinate system;
- = y-axis position of joint J in the local coordinate system.
- = X-axis position of joint J in the global coordinate system;
- = Y-axis position of joint J in the global coordinate system.
- = X-axis position of the hopper end point Q in the global coordinate system;
- = Y-axis position of the hopper end point Q in the global coordinate system.
2.4. Verification of Theoretical Planting Trajectory
2.4.1. Kinematic Simulation Using Commercial Software
2.4.2. Measurement Using a High-Speed Camera
2.5. Optimization Strategy for the Main Link Lengths of the Transplanting Device
2.6. Methodology Overview
3. Results
3.1. Theoretical Planting Trajectory from Kinematic Analysis
3.2. Planting Trajectory from Kinematic Simulation Software
3.3. Planting Trajectory from High-Speed Camera Measurement
3.4. Verification of Theoretical Planting Trajectory
3.5. Optimization Result for Main Link Lengths
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moon, S.D.; Min, Y.B.; Park, J.C. Analysis of Working Capacity of a Hand-fed Transplanter. J. Bio-Environ. Control 1997, 6, 159–167. [Google Scholar]
- Kang, D.I. Design of Automatic Feeding System for Tray Seedling and Transplanting Mechanism Analysis for A Vegetable Transplanter. Ph.D. Thesis, Sungkyunkwan University, Seoul, Korea, 1993; pp. 1–2. [Google Scholar]
- Food and Agriculture Organization of the United Nations: Agriculture and Consumer Protection. Available online: http://www.fao.org/faostat/en/#data/QC (accessed on 10 August 2020).
- Korea National Statistical Office: Survey on the Use of Agricultural Machinery. Available online: https://kosis.kr/statHtml/statHtml.do?orgId=143&tblId=DT_143004N_025&vw_cd=MT_ZTITLE&list_id=K1_14&seqNo=&lang_mode=ko&language=kor&obj_var_id=&itm_id=&conn_path=MT_ZTITLE (accessed on 28 November 2020).
- Kang, T.G.; Kim, S.W.; Kim, Y.K.; Lee, S.H.; Jun, H.J.; Choi, I.S.; Yang, E.Y.; Jan, K.S.; Kim, H.G. Analysis of Pick-up Mechanism for Automatic Transplanter (I). J. Agric. Life Sci. 2017, 51, 187–192. [Google Scholar] [CrossRef]
- Shim, S.B.; Kim, Y.J.; Yang, S.H.; Lee, S.D.; Lee, D.K. A Study on Trace of Hopper of the Transplanter. Proc. Conf. Korean Soc. Agric. Mach. 2016, 21, 201–202. [Google Scholar]
- Park, S.H.; Cho, S.C.; Kim, J.Y.; Choi, D.K.; Kim, C.K.; Kwak, T.Y. Motion Analysis for 4bar Link Type of Transplanting Device. Proc. Conf. Korean Soc. Agric. Mach. 2004, 9, 155–159. [Google Scholar]
- Park, J.H.; Hwang, S.J.; Nam, J.S. Operational characteristics of a domestic commercial semi-automatic vegetable transplanter. J. Agric. Life Sci. 2018, 52, 127–138. [Google Scholar] [CrossRef]
- Lee, S.D.; Lee, D.K.; Kim, Y.J.; Yang, S.H.; Kim, T.Y. Trajectory Analysis of Automatic Transplanter using High-Speed Camera. Proc. Conf. Korean Soc. Agric. Mach. 2016, 21, 141–142. [Google Scholar]
- Park, S.H.; Cho, S.C.; Kim, J.Y.; Choi, D.K.; Kim, C.K.; Kwak, T.Y. Motion Analysis for 4bar Link and Slide Type of Transplanting Device. Proc. Conf. Korean Soc. Agric. Mach. 2004, 9, 160–164. [Google Scholar]
- Jo, J.S.; Okyere, F.G.; Jo, J.M.; Kim, H.T. A Study on Improving the Performance of the Planting Device of a Vegetable Transplanter. Proc. Conf. Korean Soc. Agric. Mach. 2018, 43, 202–210. [Google Scholar]
- Liu, T.T.; Hou, S.L.; Zhao, X.; Yin, L.J.; Yin, C.G.; Wang, Q.F. Computer Aided Analysis of Planting Mechanism of the Seedling Transplanter. Proc. Conf. Meas. Technol. Mechatron. Autom. 2009, 3, 38–41. [Google Scholar]
- Mendi, F.; Baskal, T.; Boran, K.; Boran, F.E. Optimization of Module, Shaft Diameter and Rolling Bearing for Spur Gear through Genetic Algorithm. Expert Syst. Appl. 2010, 37, 8050–8064. [Google Scholar] [CrossRef]
- Lee, S.B.; Lim, T.K.; Roh, T.S. Design Optimization of Liquid Rocket Engine Using Genetic Algorithms. J. Korean Soc. Propuls. Eng. 2012, 16, 25–33. [Google Scholar] [CrossRef]
- Lampinen, J. Cam Shape Optimisation by genetic algorithm. Comput. Aided Des. 2003, 35, 727–737. [Google Scholar] [CrossRef]
- Kim, Y.B.; Lee, J.H. Optimum design of Thin-walled I-section Composite Beams using Micro Genetic Algorithm. J. Archit. Inst. Korea Struct. Constr. 2003, 19, 69–76. [Google Scholar]
- Rahami, H.; Kaveh, A.; Gholipour, Y. Sizing, geometry and topology optimization of trusses via force method and genetic algorithm. Eng. Struct. 2008, 30, 2360–2369. [Google Scholar] [CrossRef]
- Norton, R.L. Grashof condition. Kinematics and Dynamics of Machinery, 2nd ed.; Park, Y.P., Park, C.Y., Ahn, C.W., Eds.; Kyobobook: Seoul, Korea, 2005; pp. 56–61. [Google Scholar]
- Juvinall, R.C.; Marshek, K.M. Machine Component Design, 5th ed.; WILEY, John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2020; pp. 841–847. [Google Scholar]
- Hsu, C.C.; Chao, C.K.; Wang, J.L.; Lin, J. Multiobjective Optimization of Tibial Locking Screw Design Using a Genetic Algorithm: Evaluation of Mechanical Performance. J. Orthop. Res. 2006, 24, 908–916. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.H.; Lee, G.H.; Bae, I.H.; Chong, T.H. An Optimum Design Method of Hypoid Gear by Minimizing Volume. Korean Soc. Manuf. Technol. Eng. 2007, 16, 55–61. [Google Scholar]
- Krishnakumar, K. Micro-genetic Algorithms for Stationary and Non-stationary Function Optimization Function. In Intelligent Control and Adaptive Systems; International Society for Optics and Photonics: Washington, DC, USA, 1989; Volume 1196, pp. 282–296. [Google Scholar]
- Lee, S.Y. Nondestructive Damage Identification of Free Vibrating Thin Plate Structures Using Micro-Genetic Algorithms. J. Korean Soc. Steel Constr. 2005, 17, 173–181. [Google Scholar]
- Lee, M.K.; Kim, C.G. Optimal Design of Laminated Stiffened Composite Structures using a parallel micro Genetic Algorithm. Compos. Res. 2008, 21, 30–37. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Specification | |
|---|---|---|
| Model | KP-100KR | |
| Manufacturer, nation | KUBOTA, Japan | |
| Engine | Type | Gasoline |
| Rated power (kW) | 2.6 | |
| Rated speed (rpm) | 1550 | |
| Length/width/height | mm | 2150/1360/1130 |
| Weight | kg | 280 |
| Plant spacing | mm | 350–900 |
| Rated working speed | km/h | 1.84 |
| Working efficiency | h/10a | 1.5–2.5 |
| Link | Joint | ||
|---|---|---|---|
| Type | Elements | Type | Elements |
| Binary | L2, L5, L6, L7, L10, L11, L12, L13 | Revolute | A–P |
| Ternary | L3, L9 | ||
| Ternary | L3, L9 | Sliding | ⓐ |
| Quaternary | L4, L8 | ||
| Ground | L1 | ||
| Items | Specification |
|---|---|
| Model | NX4-S1 |
| Manufacturer, nation | IDT, USA |
| Maximum resolution (ppi) | 1024 × 1024 |
| Maximum frame per second (fps) | 1000 |
| Pixel size (μm) | 13.68 × 13.68 |
| Source | Sum of Squares | Degrees of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 3348.83 | 1 | 3348.83 | 2.92 | 0.088 |
| Error | 652,286.14 | 568 | 1148.39 | ||
| Corrected total | 655,634.98 | 569 |
| Source | Sum of Squares | Degrees of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 1549.17 | 1 | 1549.17 | 1.21 | 0.271 |
| Error | 725,596.72 | 568 | 1277.46 | ||
| Corrected total | 727,145.89 | 569 |
| Crank (mm) | Coupler (mm) | Rocker (mm) | Sum of Lengths (mm) | Sum Reduction Ratio |
|---|---|---|---|---|
| 39.49 | 84.21 | 64.35 | 188.05 | 18.32% |
| Source | Sum of Squares | Degrees of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 187.679 | 1 | 187.679 | 0.148 | 0.701 |
| Error | 913,317.556 | 718 | 1272.030 | ||
| Corrected total | 913,505.235 | 719 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, S.-J.; Park, J.-H.; Lee, J.-Y.; Shim, S.-B.; Nam, J.-S. Optimization of Main Link Lengths of Transplanting Device of Semi-Automatic Vegetable Transplanter. Agronomy 2020, 10, 1938. https://doi.org/10.3390/agronomy10121938
Hwang S-J, Park J-H, Lee J-Y, Shim S-B, Nam J-S. Optimization of Main Link Lengths of Transplanting Device of Semi-Automatic Vegetable Transplanter. Agronomy. 2020; 10(12):1938. https://doi.org/10.3390/agronomy10121938
Chicago/Turabian StyleHwang, Seok-Joon, Jeong-Hyeon Park, Ju-Yeon Lee, Sung-Bo Shim, and Ju-Seok Nam. 2020. "Optimization of Main Link Lengths of Transplanting Device of Semi-Automatic Vegetable Transplanter" Agronomy 10, no. 12: 1938. https://doi.org/10.3390/agronomy10121938
APA StyleHwang, S.-J., Park, J.-H., Lee, J.-Y., Shim, S.-B., & Nam, J.-S. (2020). Optimization of Main Link Lengths of Transplanting Device of Semi-Automatic Vegetable Transplanter. Agronomy, 10(12), 1938. https://doi.org/10.3390/agronomy10121938