Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse


 , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
2.1. Problem Formulation
2.2. Selection of Greenhouse for Protected Strawberry Cultivation
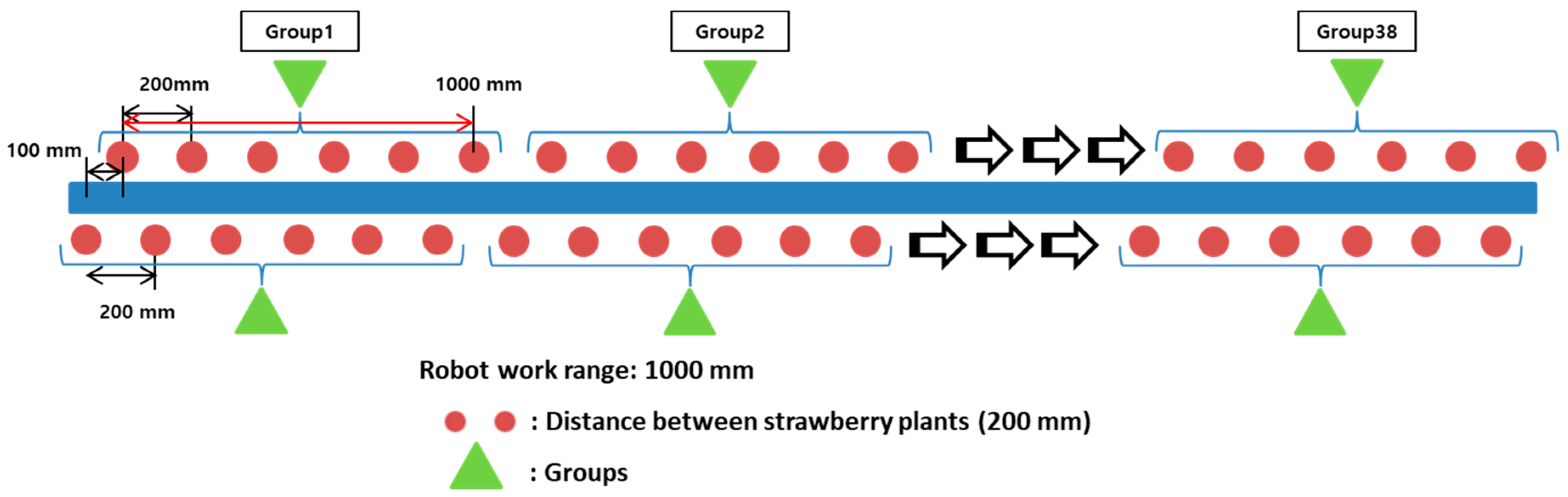
2.3. Setup of Planting Distance and Harvesting Work Range
2.4. Path Design for Strawberry Harvesting and Transportation Using Robots
2.5. Development of Logics for Strawberry Harvesting and Transportaion by Robots and Humans
2.6. Setup of Parameters for Strawberry-Harvesting with Transportation Robots and Human Workers
3. Results
3.1. Productivity of Harvesting Robot According to Harvesting Time
3.2. Productivity of Harvesting Robots According to Battery Performance
3.3. Productivity of the Harvesting Robot Based on the Battery Recharge Time
3.4. Productivity of Harvesting Robots in Relation to Velocity
3.5. Economic Analyses of Robot Usage
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hall, E.M.A. Kim Sŏnghwan’s ‘Mr. Kobau’: Editorial Cartoons as Genre Weapons in South Korean Search for Democracy, 1945–1972. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2019. [Google Scholar]
- Iqbal, Z.; Islam, N.; Jang, B.E.; Ali, M.; Kabir, S.N.; Lee, D.H.; Na, K.D.; Park, S.B.; Chung, S.O. Monitoring the Operating Status of an Automatic Harmful Fly Collector for Smart Greenhouses. J. Biosyst. Eng. 2019, 44, 258–268. [Google Scholar] [CrossRef]
- Spehia, R.S. Status and impact of protected cultivation in Himachal Pradesh, India. Curr. Sci. 2015, 108, 2254–2257. [Google Scholar]
- Choudhary, A.K. Scaling-up of protected cultivation in Himachal Pradesh, India. Curr. Sci. 2016, 111, 272–277. [Google Scholar] [CrossRef]
- Sharma, K.D.; Pathania, M.S.; Bala, B.; Gupta, M. Progress of Protected Cultivation under Rural Infrastructural Development Fund (RIDF) Project in Himachal Pradesh. Indian J. Agric. Econ. 2015, 70, 285. [Google Scholar]
- Negi, V.S.; Maikhuri, R.K.; Rawat, L.S.; Parshwan, D. Protected cultivation as an option of livelihood in mountain region of central Himalaya, India. Int. J. Sustain. Dev. World Ecol. 2013, 20, 416–425. [Google Scholar] [CrossRef]
- Son, D.S.; Kim, Y.S.; Jeong, S.B.; Lee, K.K. A survey on the cultivated condition and management in main protected cultivation of grapes in Korea. Res. Rep. Rural Dev. Adm. 1989, 31, 22–29. [Google Scholar]
- Kim, M.K. Trend of protected cultivation for adjusting to high technology in Korea. Acta Hortic. 1988, 230, 505–514. [Google Scholar] [CrossRef]
- Jensen, M.H. Food Production in Greenhouses, in Plant Production in Closed Ecosystems; Springer: Berlin/Heidelberg, Germany, 1997; pp. 1–14. [Google Scholar]
- Maracchi, G.; Sirotenko, O.; Bindi, M. Impacts of present and future climate variability on agriculture and forestry in the temperate regions: Europe. Clim. Chang. 2005, 70, 117–135. [Google Scholar] [CrossRef]
- Jensen, M.H. Controlled Environment agriculture in deserts, tropics and temperate regions—A World Review. Acta Hortic. 2002, 578, 19–25. [Google Scholar] [CrossRef]
- Anil, K.; Tiwari, G.N.; Subodh, K.; Mukesh, P. Role of greenhouse technology in agricultural engineering. Int. J. Agric. Res. 2010, 5, 779–787. [Google Scholar]
- Park, S.H.; Park, T.; Park, H.D.; Jung, D.H.; Kim, J.Y. Development of Wireless Sensor Node and Controller Complying with Communication Interface Standard for Smart Farming. J. Biosyst. Eng. 2019, 23, 41–45. [Google Scholar] [CrossRef]
- Li, Y.; Ye, W.; Wang, M.; Yan, X. Climate change and drought: A risk assessment of crop-yield impacts. Clim. Res. 2009, 39, 31–46. [Google Scholar] [CrossRef]
- Mukherjee, S.; Mishra, A.; Trenberth, K.E. Climate change and drought: A perspective on drought indices. Curr. Clim. Chang. Rep. 2018, 4, 145–163. [Google Scholar] [CrossRef]
- Syed, A.M.; Hachem, C. Review of Design Trends in Lighting, Environmental Controls, Carbon Dioxide Supplementation, Passive Design, and Renewable Energy Systems for Agricultural Greenhouses. J. Biosyst. Eng. 2019, 23, 28–36. [Google Scholar] [CrossRef]
- Basak, J.K.; Qasim, W.; Okyere, F.G.; Khan, F.; Lee, Y.J.; Park, J.; Kim, H.T. Regression analysis to estimate morphology parameters of pepper plant in a controlled greenhouse system. J. Biosyst. Eng. 2019, 44, 57–68. [Google Scholar] [CrossRef]
- Bryden, J.; Bollman, R. Rural employment in industrialised countries. Agric. Econ. 2000, 22, 185–197. [Google Scholar] [CrossRef]
- Labrianidis, L.; Sykas, T. Migrants, economic mobility and socio-economic change in rural areas: The case of Greece. Eur. Urban Reg. Stud. 2009, 16, 237–256. [Google Scholar] [CrossRef]
- Jeong, O.Y.; Park, H.S.; Baek, M.K.; Kim, W.J.; Lee, G.M.; Lee, C.M.; Bombay, M.; Ancheta, M.B.; Lee, J.H. Review of rice in Korea: Current status, future prospects, and comparisons with rice in other countries. J. Crop Sci. Biotechnol. 2020, 1–11. [Google Scholar]
- Sweeper. ICT Robotic Use Cases Project in the H2020 Programme of the EU. 2020. Available online: http://www.sweeper-robot.eu/ (accessed on 2 August 2020).
- Sammons, P.J.; Furukawa, T.; Bulgin, A. Autonomous pesticide spraying robot for use in a greenhouse. In Australian Conference on Robotics and Automation; Commonwealth Scientific and Industrial Research Organisation: Canberra, Australia, 2005. [Google Scholar]
- Jurewicz, J.; Kouimintzis, D.; Burdorf, A.; Hanke, W.; Chatzis, C.; Linos, A. Occupational risk factors for work-related disorders in greenhouse workers. J. Public Health 2007, 15, 265–277. [Google Scholar] [CrossRef]
- Iddio, E.; Wang, L.; Thomas, Y.; McMorrow, G.; Denzer, A. Energy efficient operation and modeling for greenhouses: A literature review. Renew. Sustain. Energy Rev. 2020, 117, 109480. [Google Scholar] [CrossRef]
- Tataraki, K.; Giannini, E.; Kavvadias, K.; Maroulis, Z. Cogeneration Economics for Greenhouses in Europe. Energies 2020, 13, 3373. [Google Scholar] [CrossRef]
- Ahamed, M.S.; Guo, H.; Tanino, K. Modeling heating demands in a Chinese-style solar greenhouse using the transient building energy simulation model TRNSYS. J. Build. Eng. 2020, 29, 101114. [Google Scholar] [CrossRef]
- Hanan, J.J. Radiation p. 91–166. In Greenhouses: Advanced Technology for Protected Horticulture; CRC Press Inc.: Boca Raton, FL, USA, 1998. [Google Scholar]
- Yang, J.-Y. Current Status of Big Data-Based Smart Agriculture and Promotion Direction, Korea; Agency of Education, Promotion & Information Service in Food, Agriculture, Forestry: Sejong-si, Korea, 2017.
- Nam, Y.-I. Present Status and Developmental Strategy of Protected Horticulture Industry in Korea. KCID J. 2003, 10, 15–23. [Google Scholar]
- Kim, G.-C. Development of Thermal Storage Greenhouse and Environment Control System for Protected Cultivation of Strawberry; Rural Development Administration: Jeonju, Korea, 2016.
- Technology Management Division. Changes and Characteristics of Agricultural Labor Time of Protected Fruits and Vegetables; Rural Development Administration: Jeonju, Korea, 2019.
- Marketing & Consumer Policy Bureau Horticulture Industry Division. Current Status of Protected Vegetable Greenhouse and Production Performance of Vegetables in 2018. Available online: https://www.mafra.go.kr/mafra/366/subview.do?enc=Zm5jdDF8QEB8JTJGYmJzJTJGbWFmcmElMkY3MSUyRjMyMTY2OCUyRmFydGNsVmlldy5kbyUzRg%3D%3D (accessed on 10 February 2020).
- Quest. Quest Software. 2020. Available online: https://www.quest.com/ (accessed on 1 May 2020).
- Lim, M.W.H. Simulation and Validation of a Surface Mount Technology Line Using Delmia Quest. Bachelor’s Thesis, Tunku Abdul Rahman University College, Kuala Lumpur, Malaysia, 2020. [Google Scholar]
- Hamzah, N.; Ismail, S.Z. Integrating comprehensive industrial raw material delivery planning and product-service system inventory control. J. Mod. Manuf. Syst. Technol. 2020, 4, 14–22. [Google Scholar]
- Bzymek, Z.M.; Nunez, M.; Li, M.; Powers, S. Simulation of a machining sequence using delmia/quest software. Comput.-Aided Des. Appl. 2008, 5, 401–411. [Google Scholar] [CrossRef]
- Salleh, N.A.; Kasolang, S.; Jaffar, A. Simulation of integrated total quality management (TQM) with lean manufacturing (LM) practices in forming process using Delmia Quest. Procedia Eng. 2012, 41, 1702–1707. [Google Scholar] [CrossRef]
- Giudicelli, V.; Chaume, D.; Lefranc, M.P. IMGT/V-QUEST, an integrated software program for immunoglobulin and T cell receptor V–J and V–D–J rearrangement analysis. Nucleic Acids Res. 2004, 32, W435–W440. [Google Scholar] [CrossRef]
- Pasca, G.; Maniu, I. Synthesis of the Design of Flexible Manufacturing System Using Delmia Quest Software. Available online: https://www.thefreelibrary.com/Synthesis+of+the+design+of+flexible+manufacturing+system+using...-a0224712539 (accessed on 4 July 2020).
- Mohora, C.; Anania, D.; Calin, O.A. Simulations Strategies Using Delmia Quest. Available online: https://www.thefreelibrary.com/Simulations+strategies+using+Delmia+Quest.-a0224712359 (accessed on 11 June 2020).
- Kim, S.-Y.; Lee, G.-S.; Lee, H.-J. Digital Factory Construction by MI-NPS(Meta Intelligent-New Production System) Technique(I)- The best Manufacturing System Construction of Mini Computer Manufacturing Factory. J. Korean Product. Assoc. 2005, 19, 171–190. [Google Scholar]
- Octinion. Discover the World’s First Strawberry Picking Robot. 2020. Available online: https://picking.technology/ (accessed on 12 May 2020).
- Korea Rural Economic Institue. Changes in Income Wages. 2019. Available online: http://www.krei.re.kr/krei/researchReportView.do?key=67&pageType=010101&biblioId=518380 (accessed on 15 June 2020).
- Korea Institute for Industrial Economics and Trade. Robot Technology Trends and Prospects. 2019. Available online: https://itech.keit.re.kr/index.do#03040100 (accessed on 20 July 2020).
- Syed, A.M.; Hachem, C. Review of Construction; Geometry; Heating, Ventilation, and Air-Conditioning; and Indoor Climate Requirements of Agricultural Greenhouses. J. Biosyst. Eng. 2019, 23, 18–27. [Google Scholar] [CrossRef]
- Kim, S.H.; Kwon, J.K.; Kang, Y.K.; Moon, J.P.; Kim, H.K.; Joen, J.G. Thermal-Load Analysis of Semi-Basement-Type Single-Span Greenhouse. J. Biosyst. Eng. 2019, 44, 146–151. [Google Scholar] [CrossRef]
- World Health Organization. Coronavirus Disease (COVID-19): Situation Report; World Health Organization: Geneva, Switzerland, 2020; p. 182. [Google Scholar]
- Korea Evaluation Institute of Industrial Technology. Technical Status and Future Prospects of Logistics Robots; Korea Evaluation Institute Of Industrial Technology: Cheonan-si, Korea, 2019. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Average (mm) | SD |
|---|---|---|
| A. A-1. Width of greenhouse | 9000 | 295.08 |
| A-2. Length of greenhouse | 110,000 | 2174.6 |
| A-3. Diameter of pipe used in construction | 26 | 1.45 |
| B. Height of greenhouse in the center | 2750 | 20.72 |
| C. Height of greenhouse at the edge | 1400 | 61.1 |
| D. Crop height | 1300 | 96.6 |
| E. E-1. Bed height | 950 | 28.98 |
| E-2. Bed length | 82,400 | 966.09 |
| F. Bed width | 280 | 34.21 |
| G. Distance between bed | 900 | 193.21 |
| H. Distance between crop (minimum) | 500 | 36.6 |
| I. Distance between crop (maximum) | 750 | 66.91 |
| J. Crop dip length | 200 | 10.3 |
| K. Truss width | 9000 | 466.09 |
| L. Top height of truss | 1000 | 123.21 |
| M. Truss to crop distance | 1350 | 93.84 |
| N. Ground to truss distance | 1750 | 193.18 |
| Units | Specifications |
|---|---|
| Harvesting time (average ± SD, s) | 5 ± 0.5 |
| Work range (mm) | 1000 (Worker center line ± 500) |
| Maximum velocity (m/s) | 0.3 |
| Acceleration/deceleration (m/s2) | 10 |
| Size (L × W × H, mm) | 1000 × 700 × 300 |
| Battery (h) | Maximum 10 |
| Charging time (h) | 2 |
| Maximum capacity (kg) | 10 |
| Driving direction | 2 direction |
| Maintenance time | 30 min after 10 h working (with charging) |
| Maintenance rate | 2 h after 1000 h working (with charging) |
| Units | Specifications |
|---|---|
| Maximum velocity (m/s) | 0.3 |
| Acceleration/deceleration (m/s2) | 10 |
| Size (L × W × H, mm) | 500 × 500 × 300 |
| Battery (h) | Maximum 10 |
| Charging time (h) | 2 |
| Maximum capacity (kg) | 10 |
| Driving direction | 2 direction |
| Units | Specifications |
|---|---|
| Harvesting time (average ± SD, s) | Experienced: 1.0 ± 0.1 Average: 1.5 ± 0.1 Beginner: 2.0 ± 0.1 |
| Work range (mm) | 1000 (Worker center line ± 500) |
| Maximum velocity (m/s) | 1 |
| Acceleration/deceleration (m/s2) | 10 |
| Maximum capacity (kg) | 20 |
| Break time | 10 min after 1 h of work |
| Units | Division | |||
|---|---|---|---|---|
| Robot | Experienced | Average | Beginner | |
| Number of days * (day) | 5.7 | 7.1 | 10.2 | 14.0 |
| Average production per hour ** (kg/h) | 8.9 | 42.8 | 29.9 | 21.7 |
| Average production per day *** (kg/day) | 212.5 | 171.3 | 119.5 | 86.7 |
| Units | Harvesting Time (n/s) | ||
|---|---|---|---|
| Number of days * (day) | 1 ± 0.5 | 3 ± 0.5 | 5 ± 0.5 |
| Average production per hour ** (kg/h) | 1.2 | 3.5 | 5.7 |
| Average production per day *** (kg/day) | 42.6 | 14.5 | 8.9 |
| Dates * (day) | 1021.3 | 347.9 | 212.5 |
| Units | Battery Performance (h) | ||||
|---|---|---|---|---|---|
| 8 | 9 | 10 | 11 | 12 | |
| Number of days * (day) | 5.9 | 5.7 | 5.7 | 5.6 | 5.5 |
| Average production per hour ** (kg/h) | 8.4 | 8.5 | 8.8 | 9.0 | 9.1 |
| Average production per day *** (kg/day) | 203 | 206 | 212 | 216 | 219 |
| Units | Battery Charging Time (h) | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| Number of days * (day) | 5.2 | 5.7 | 6.1 | 6.6 |
| Average production per hour ** (kg/h) | 9.6 | 8.8 | 8.1 | 7.6 |
| Average production per day *** (kg/day) | 231 | 212 | 196 | 183 |
| Units | Harvest Robot Velocity (m/s) | ||||
|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | |
| Number of days * (day) | 6 | 5.8 | 5.7 | 5.6 | 5.5 |
| Average production per hour ** (kg/h) | 8.4 | 8.7 | 8.8 | 8.9 | 9.0 |
| Average production per day *** (kg/day) | 201 | 209 | 212 | 213 | 214 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woo, S.; Uyeh, D.D.; Kim, J.; Kim, Y.; Kang, S.; Kim, K.C.; Lee, S.Y.; Ha, Y.; Lee, W.S. Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse. Agronomy 2020, 10, 1751. https://doi.org/10.3390/agronomy10111751
Woo S, Uyeh DD, Kim J, Kim Y, Kang S, Kim KC, Lee SY, Ha Y, Lee WS. Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse. Agronomy. 2020; 10(11):1751. https://doi.org/10.3390/agronomy10111751
Chicago/Turabian StyleWoo, Seungmin, Daniel Dooyum Uyeh, Junhee Kim, Yeongsu Kim, Seokho Kang, Kyoung Chul Kim, Si Young Lee, Yushin Ha, and Won Suk Lee. 2020. "Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse" Agronomy 10, no. 11: 1751. https://doi.org/10.3390/agronomy10111751
APA StyleWoo, S., Uyeh, D. D., Kim, J., Kim, Y., Kang, S., Kim, K. C., Lee, S. Y., Ha, Y., & Lee, W. S. (2020). Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse. Agronomy, 10(11), 1751. https://doi.org/10.3390/agronomy10111751