Field Robots for Intelligent Farms—Inhering Features from Industry

 ,
,  , , and
, , and 
Abstract
1. Introduction
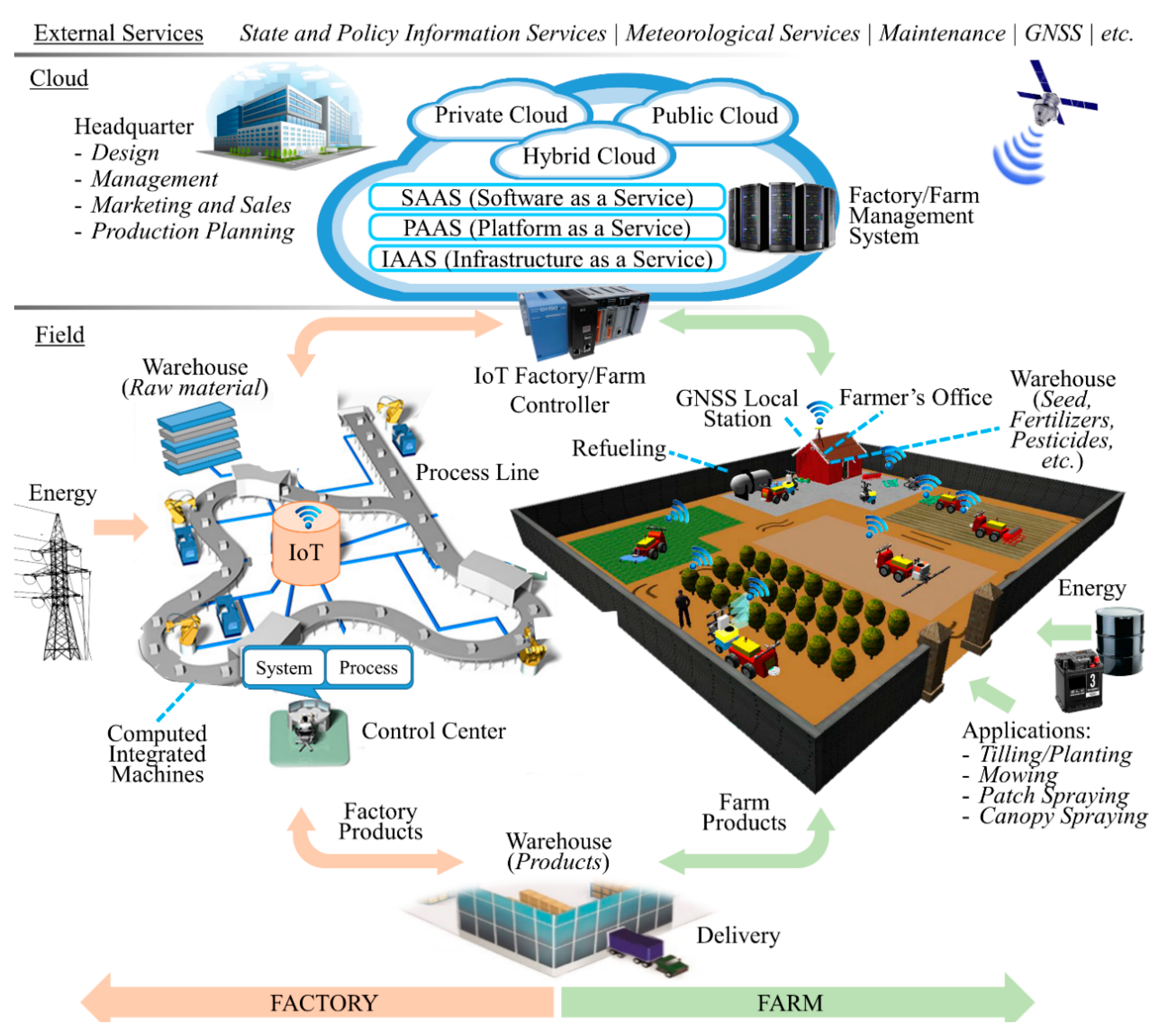
2. Intelligent Factories versus Intelligent Farms
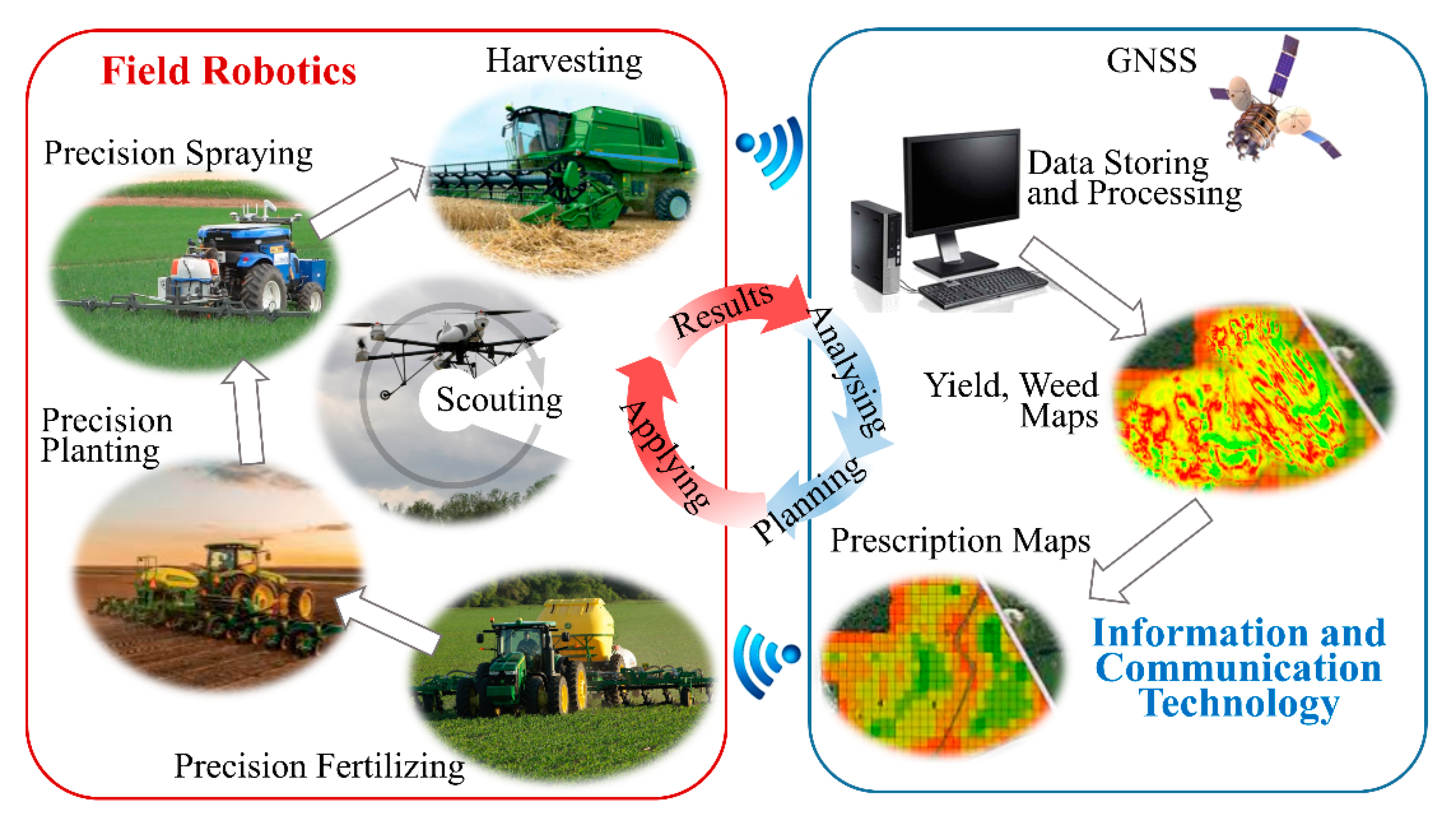
2.1. Similarities
- −
- Factories use robot manipulators that use different tools to perform dissimilar tasks. These tool changes are mainly made automatically. Similarly, farm vehicles have to change agricultural implements to perform different functions; such implement substitutions should be performed automatically.
- −
- Factory manipulators cooperate and collaborate to accomplish tasks. Similarly, mobile robots operating on farms could cooperate and collaborate to complete missions.
- −
- Factories have simple fixed sensor networks to measure different magnitudes. Likewise, fixed sensor networks could be installed at strategic measuring points in some specific farm areas.
- −
- Both factories and farms can capitalize on wireless technologies for communications.
- −
- For both factories and farms (if a network is available), everything can be controlled by a central controller (factory/farm management system).
2.2. Contrasts
- −
- Factories use equipment such as manipulators and computer numerical controlled machines that are placed at fixed positions to sense and perform operations on goods and materials supplied through assembly lines (process lines) or mobile robots. In contrast, on farms, goods and materials are often at fixed positions, while the machinery must be moved using autonomous vehicles.
- −
- Factories have complex sensors and equipment (e.g., vision systems and laser cutting tools) at fixed points in the production lines. On farms, complex sensors and equipment (e.g., vision systems and nitrogen detectors) must be moved to the appropriate measuring points on the farm.
- −
- Factories use both wired and wireless communication networks to send data to the central decision-making system. On farms, field vehicles must be equipped with innovative wireless communication systems to send collected data to the decision-making system.
- −
- Energy supplies on farms (i.e., fuel/charge) and agricultural materials (seeds, fertilizers, pesticides, etc.) are not directly comparable to those in factories, where materials and energy can be provided easily. In factories, materials are supplied through belts or robots, and energy is supplied by cables (electric) or hose pipes (hydraulic, pneumatic); on farms, energy (fuel/charge) and agricultural materials (seeds, fertilizers, pesticides, etc.) are supplied at refueling/refilling stations. These dissimilarities form challenges that must be addressed. Regarding refueling, it is worth mentioning that the trend in many countries is to support electric cars. For example, the United Kingdom has begun replacing its fleet of combustion-engine taxis in London with electrically driven taxis, while Norway and France plan to end the market for diesel and gasoline models in 2025 and 2040, respectively. Thus, the intelligent farm concept should consider this trend and shift the concept of refueling to that of recharging.
2.3. Strong Differences
- −
- Environment: Robotic applications in industry are concerned with repetitive, precise, and scheduled actions to be executed in steady, well-defined, and structured environments, while robotic applications in agriculture must address dynamic, complex, and unstructured environments and crops that feature rapid changes with position and time [14]. For example, terrain and vegetation characteristics as well as light conditions and visibility vary continuously; these variations can range from millimeters to kilometers and from seconds to months. In addition, these identifiable characteristics are imprecise and exhibit intrinsic uncertainty [15]. Furthermore, working conditions in agriculture are severe; for example, wind, dust, rain, extreme temperature, humidity, and vibrations are uncontrolled factors, whereas working conditions in industrial factories are easier to maintain within proper thresholds. Thus, new technologies are needed to overcome severe conditions in farms.
- −
- Targets: Tasks for mobile robots in agriculture can be divided into treatment/actuation tasks (e.g., planting, spraying, fertilizing, and cereal harvesting) and manipulation tasks (e.g., fruit and vegetable harvesting). To fulfill treatment/actuation tasks, a mobile robot must feature positional accuracy and leveling (if the implement is assumed to be rigidly attached to the mobile platform). In this case, the positional accuracy provided by commercial differential GPS (DGPS) systems is usually enough. However, for fruit harvesting, the mobile platform needs only rough positioning, but the manipulators, in conjunction with the pertinent sensors, must be capable of accurate positioning.Many agricultural tasks involve objects such as plants or fruits that are soft, vary widely in shape and size, and are extremely sensitive to environmental physical conditions, primarily temperature, humidity, pressure, and wind [16]. In contrast, in many industrial tasks, robots manipulate rigid, nondeformable objects with static physical features that are easy to grasp and handle. Thus, agriculture demands complex sensors and intelligent manipulation systems that provide gentle; precise; and, usually, complex handling maneuvers to maintain quality. These characteristics have jeopardized the introduction of robotic systems to replace humans for tasks that require manipulating agricultural products, and these tasks are often still being handled manually [17]. However, manual labor can comprise 40% of the total cost, and labor remains the largest single cost-contributor in agriculture [18]; this cost makes the introduction of robotic manipulators economically attractive and incidentally will accelerate the introduction of mobile robots into agriculture.
- −
- Duty cycle: Additionally, achieving a level of automation for farms as high as that found in factories is difficult because of the seasonality of agricultural tasks. Mobile robots can be adapted to several tasks over an entire year; however, these robots will never achieve the nonstop production achieved by industrial production lines.
3. Approach to the Intelligent Farm Concept
3.1. Artificial Intelligence
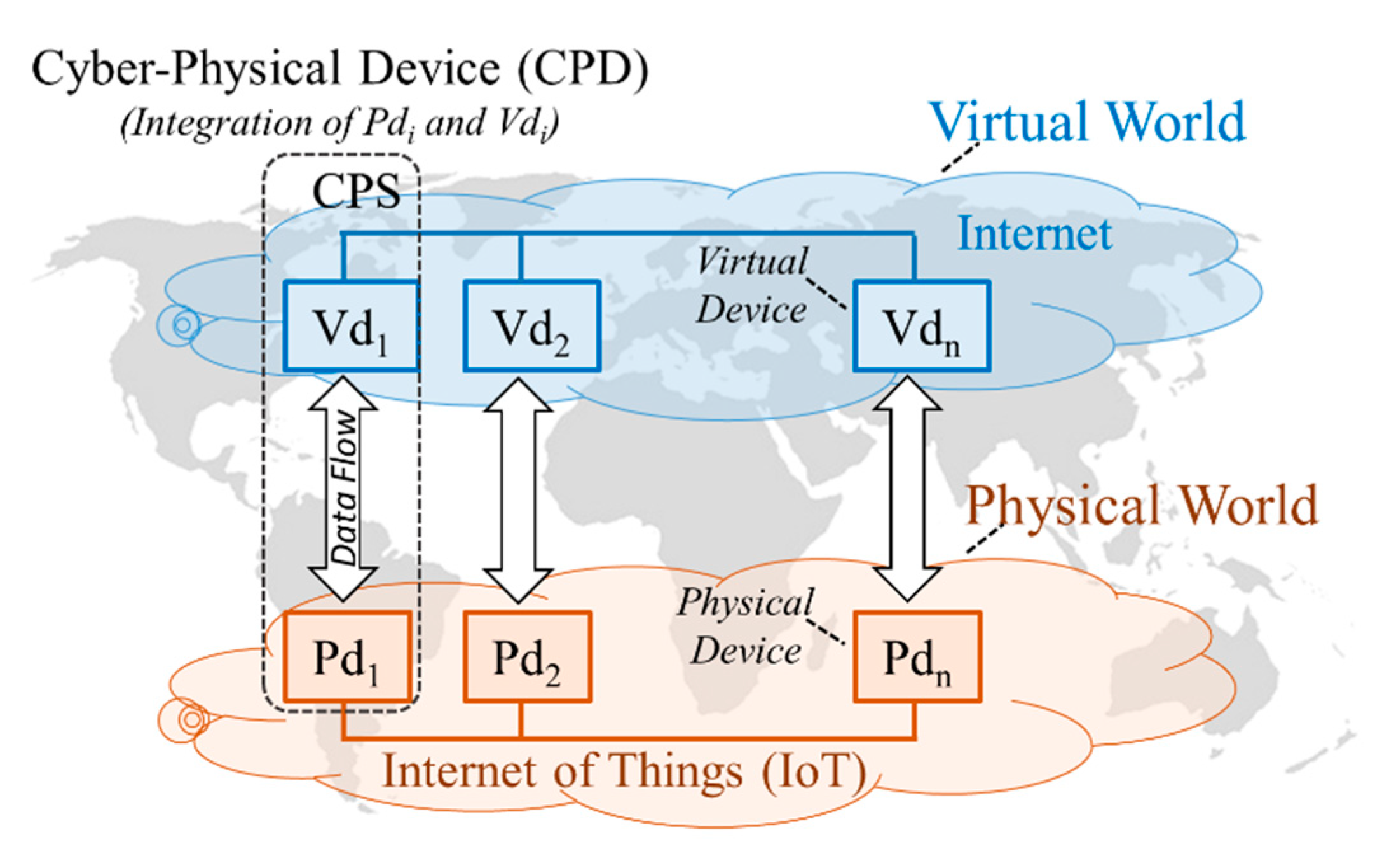
3.2. Cyber-Physical Systems
3.3. The Internet of Things
3.4. Big Data
3.5. Cloud Computing
4. Manipulators for Agriculture
4.1. Arms and End Effectors
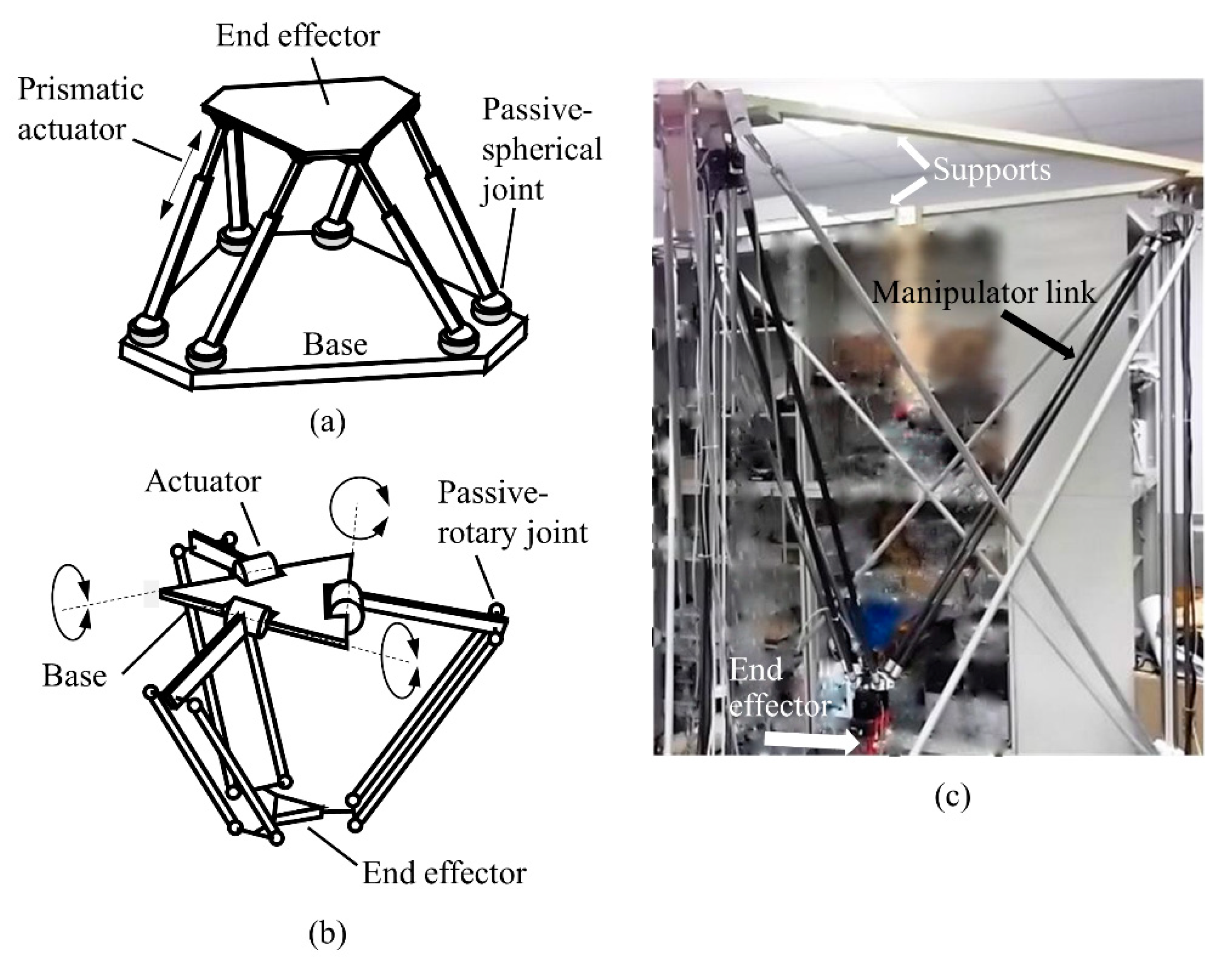
4.2. Parallel Manipulators
4.3. Soft Manipulators
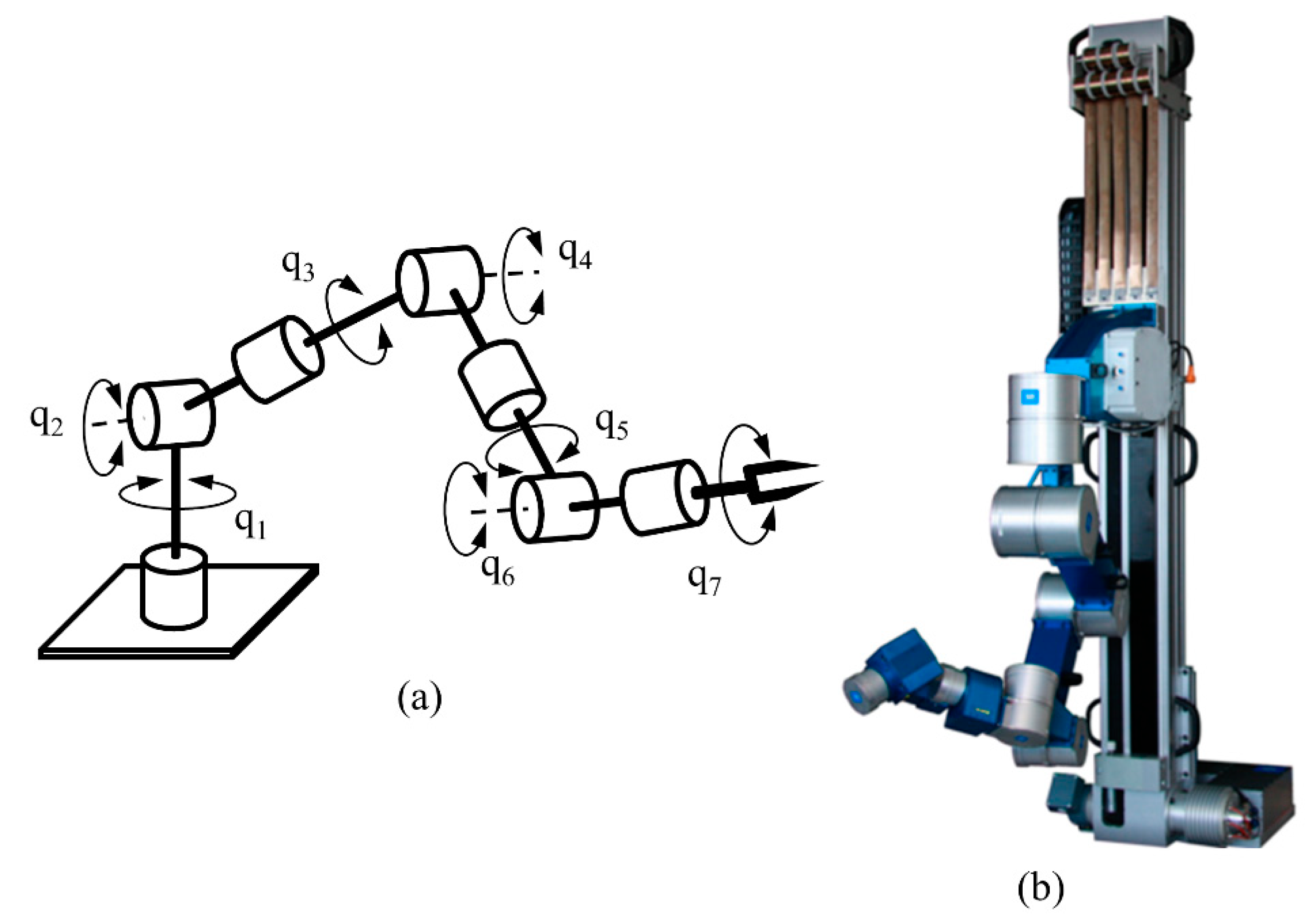
4.4. Redundant Manipulators
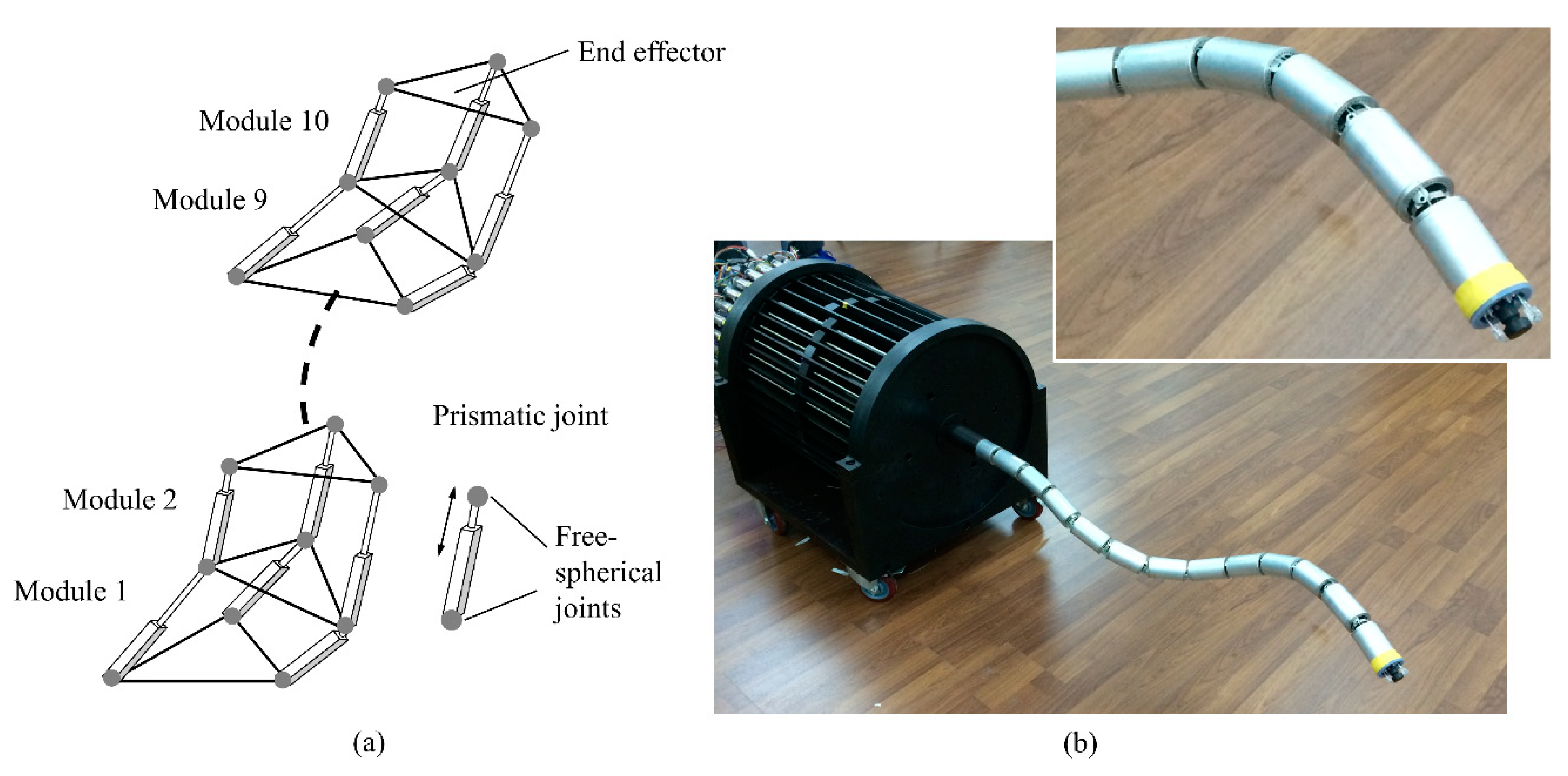
4.5. Hyperredundant Manipulators and Continuum Manipulators
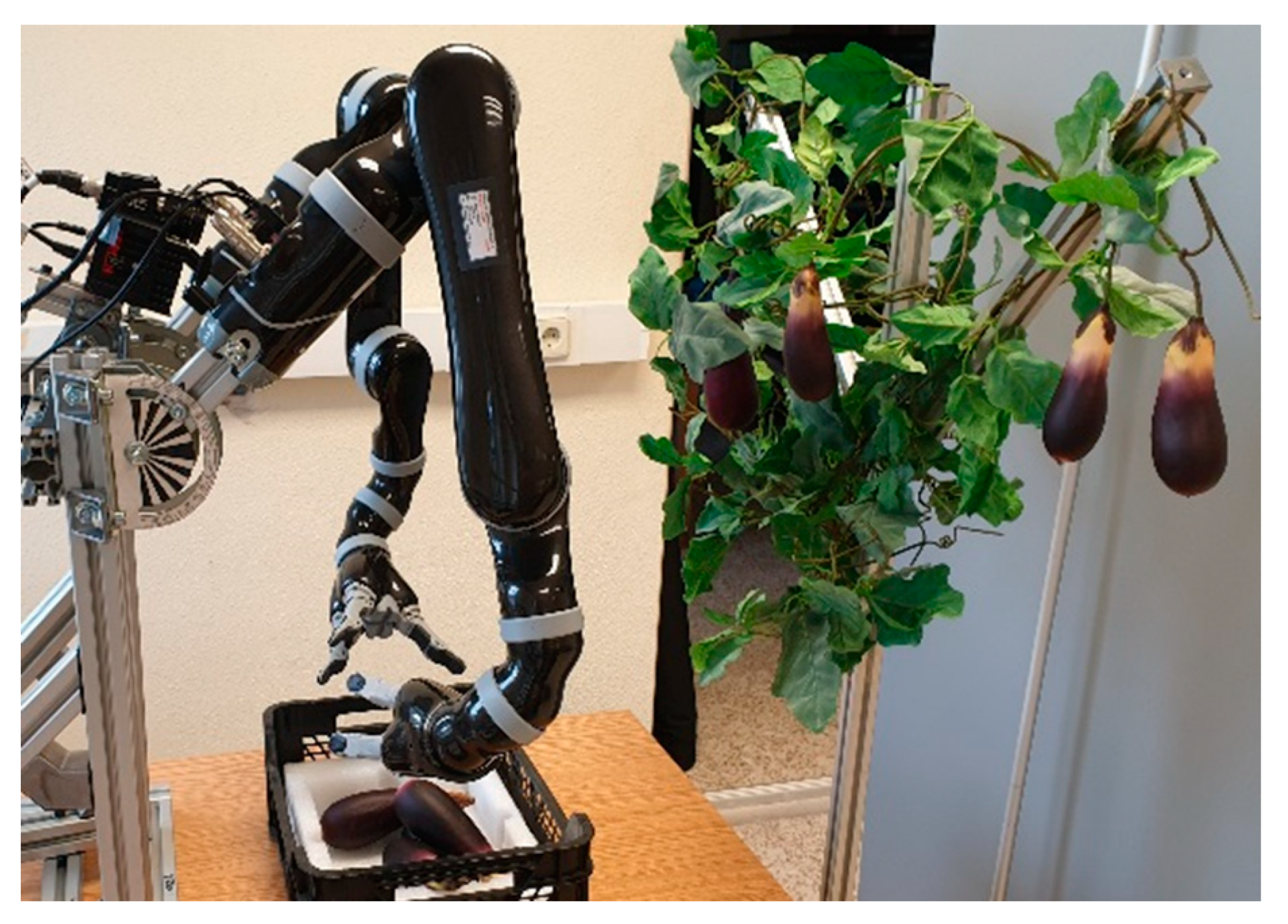
4.6. Dual-Arm Manipulators
5. Unmanned Ground Robots for Agriculture
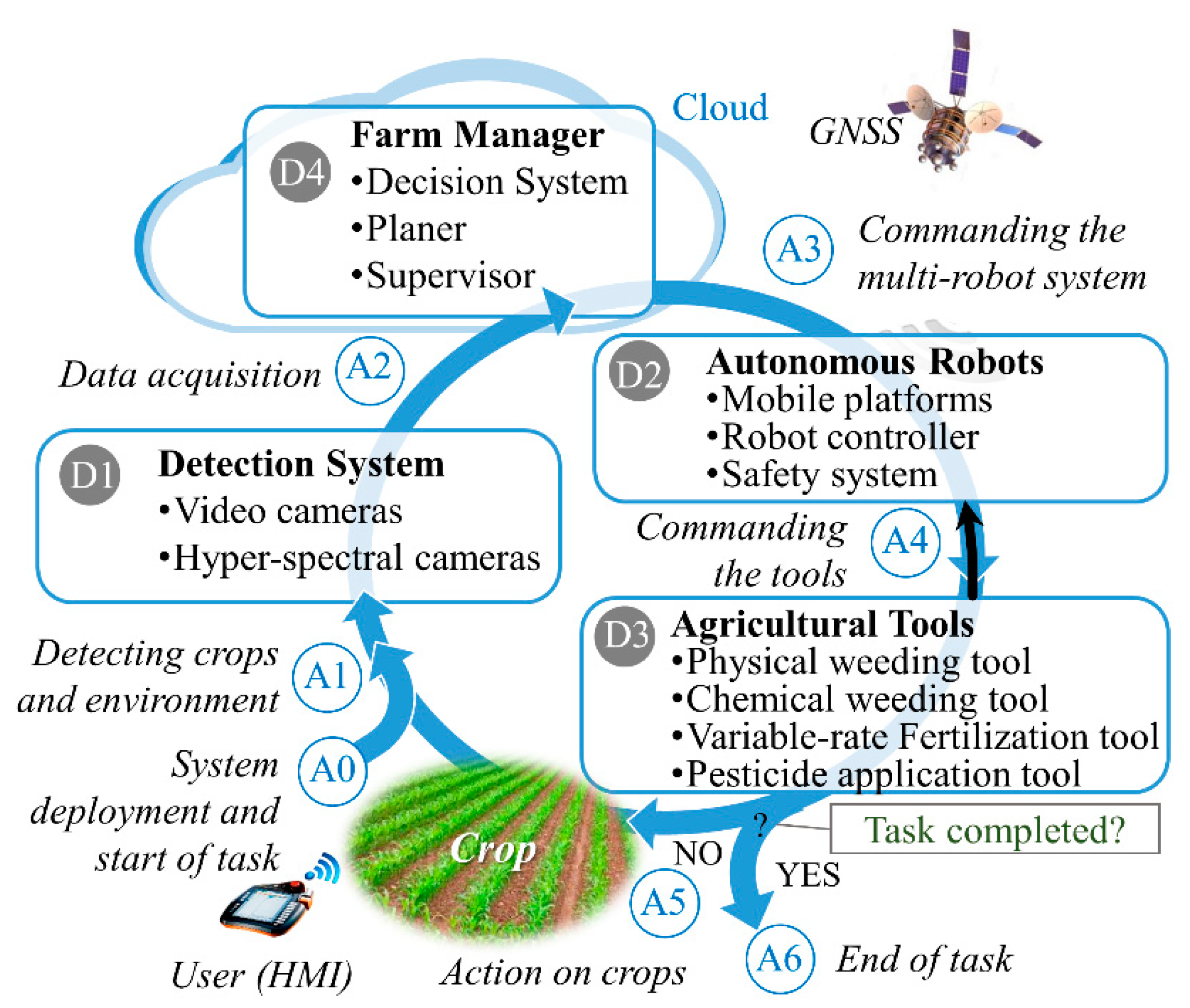
5.1. Approach to UGVs for Agriculture
- D1
- Detection system: This sensor system provides data concerning soil, crops, and weed management;
- D2
- Autonomous robots: Each robot comprises a mobile platform, a robot controller, and a safety system;
- D3
- Agricultural tools: These tools act directly on soil/crops and can be based on physical (mechanical, thermal, etc.) and chemical (pesticides, fertilizers, etc.) principles; and
- D4
- Farm manager: This aspect normally includes a decision support system, a planner, and a supervisor.
- A0
- The system is deployed in the working field.
- A1
- The sensors onboard the multirobot system, D1, detect crop, soil, and environmental features in a small area in front of the robots.
- A2
- The collected data are sent, via the robot controllers, to the decision support system, which determines the subsequent commands for the robots and agricultural implements.
- A3
- Motion commands and intervention instructions are sent to the multirobot systems, which follow the planned trajectories; the robots move to the supplied positions.
- A4
- The robots send the pertinent commands to the agricultural tools to perform the treatment.
- A5
- The treatment is applied; then, the process repeats from action A1 or exits if the task is complete, A6.
- A6
- The task is complete.
5.2. Automation of Conventional Vehicles
5.3. Design of Specific Robot Structures
6. Unmanned Aerial Robots for Agriculture
7. Multirobot Systems and Fleets
- −
- more accurate positioning during operation;
- −
- an intrinsically lighter weight than conventional machines, which reduces soil compaction and improves vehicle safety for people, crops, and the robot itself—all of which are features currently requested for agricultural equipment [83];
- −
- easier acquisition because the multirobot approach allows farmers to acquire high-technology equipment in an incremental manner;
- −
- increased fault tolerance—a failure in a small robot means one less robot at work, while a failure in a large vehicle halts the entire field operation; and
- −
- mission coordination and reconfiguration—at any time, the fleet behavior can be changed to optimize the mission or accommodate sudden changes in field conditions.
8. Conclusions
8.1. Summary and Considerations
8.2. Final Remarks
Author Contributions
Funding
Conflicts of Interest
References
- CEMA. European Agricultural Machinery. Available online: https://www.cema-agri.org/ (accessed on 2 July 2020).
- Pflanz, M.; Nordmeyer, H.; Schirrmann, M. Weed Mapping with UAS Imagery and a Bag of Visual Words Based Image Classifier. Remote Sens. 2018, 10, 1530. [Google Scholar] [CrossRef]
- Deng, J.; Zhong, Z.; Huang, H.; Lan, Y.; Han, Y.; Zhang, Y. Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles. Appl. Sci. 2020, 10, 7132. [Google Scholar] [CrossRef]
- Hu, J.; Wang, T.; Yang, J.; Lan, Y.; Lv, S.; Zhang, Y. WSN-Assisted UAV Trajectory Adjustment for Pesticide Drift Control. Sensors 2020, 20, 5473. [Google Scholar] [CrossRef] [PubMed]
- Suardi, A.; Stefanoni, W.; Alfano, V.; Bergonzoli, S.; Pari, L. Equipping a Combine Harvester with Turbine Technology Increases the Recovery of Residual Biomass from Cereal Crops via the Collection of Chaff. Energies 2020, 13, 1572. [Google Scholar] [CrossRef]
- Gonzalez-De-Soto, M.; Emmi, L.; Perez-Ruiz, M.; Agüera, J.; Gonzalez-De-Santos, P. Autonomous systems for precise spraying—Evaluation of a robotised patch sprayer. Biosyst. Eng. 2016, 146, 165–182. [Google Scholar] [CrossRef]
- Gonzalez-De-Soto, M.; Emmi, L.; Garcia, I.; Gonzalez-De-Santos, P. Reducing fuel consumption in weed and pest control using robotic tractors. Comput. Electron. Agric. 2015, 114, 96–113. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Santos, C.H.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Burke, R.; Mussomeli, A.; Laaper, S.; Hartigan, M.; Sniderman, B. The Smart Factory: Responsive, Adaptive, Connected Manufacturing; Deloitte University Press: Westlake, TX, USA, 2017; Available online: https://dupress.deloitte.com/dup-us-en/focus/industry-4-0/smart-factory-connected-manufacturing.html (accessed on 2 July 2020).
- Robert, M.; Thomas, A.; Bergez, J.-E. Processes of adaptation in farm decision-making models. A review. Agron. Sustain. Dev. 2016, 36, 64. [Google Scholar] [CrossRef]
- Brewster, C.; Roussaki, I.; Kalatzis, N.; Doolin, K.; Ellis, K. IoT in Agriculture: Designing a Europe-Wide Large-Scale Pilot. IEEE Commun. Mag. 2017, 55, 26–33. [Google Scholar] [CrossRef]
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M.-J. Big Data in Smart Farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- Ochoa, S.F.; Fortino, G.; Di Fatta, G. Cyber-physical systems, internet of things and big data. Futur. Gener. Comput. Syst. 2017, 75, 82–84. [Google Scholar] [CrossRef]
- Hiremath, S.A.; Van Der Heijden, G.W.A.M.; Van Evert, F.K.; Stein, A.; Ter Braak, C.J.F. Laser range finder model for autonomous navigation of a robot in a maize field using a particle filter. Comput. Electron. Agric. 2014, 100, 41–50. [Google Scholar] [CrossRef]
- Bechar, A. Robotics in horticultural field production. Stewart Postharvest Rev. 2010, 6, 1–11. [Google Scholar] [CrossRef]
- Eizicovits, D.; Berman, S. Efficient sensory-grounded grasp pose quality mapping for gripper design and online grasp planning. Robot. Auton. Syst. 2014, 62, 1208–1219. [Google Scholar] [CrossRef]
- Zion, B.; Mann, M.; Levin, D.; Shilo, A.; Rubinstein, D.; Shmulevich, I. Harvest-order planning for a multiarm robotic harvester. Comput. Electron. Agric. 2014, 103, 75–81. [Google Scholar] [CrossRef]
- Bechar, A.; Eben-Chaime, M. Hand-held computers to increase accuracy and productivity in agricultural work study. Int. J. Prod. Perform. Manag. 2014, 63, 194–208. [Google Scholar] [CrossRef]
- Wang, P. On Defining Artificial Intelligence. J. Artif. Gen. Intell. 2019, 10, 1–37. [Google Scholar] [CrossRef]
- Nirmala, G.; Geetha, S.; Selvakumar, S. Mobile Robot Localization and Navigation in Artificial Intelligence: Survey. Comput. Methods Soc. Sci. 2017, IV, 12–22. Available online: http://cmss.univnt.ro/wp-content/uploads/vol/split/vol_IV_issue_2/CMSS_vol_IV_issue_2_art.002.pdf (accessed on 2 July 2020).
- Li, B.-H.; Hou, B.-C.; Yu, W.-T.; Lu, X.-B.; Yang, C.-W. Applications of artificial intelligence in intelligent manufacturing: A review. Front. Inf. Technol. Electron. Eng. 2017, 18, 86–96. [Google Scholar] [CrossRef]
- Lee, E.A. Cyber Physical Systems: Design Challenges. In Proceedings of the 11th IEEE International Symposium on Object and Component-Oriented Real-Time Distributed Computing (ISORC), Orlando, FL, USA, 5–7 May 2008; pp. 363–369. [Google Scholar]
- Bordel, B.; Alcarria, R.; Robles, T.; Martín, D. Cyber–physical systems: Extending pervasive sensing from control theory to the Internet of Things. Pervasive Mob. Comput. 2017, 40, 156–184. [Google Scholar] [CrossRef]
- Mell, P.; Grance, T. The NIST Definition of Cloud Computing, Version 15, 10-7-09. National Institute of Standards and Technology. Information Technology Laboratory. Available online: https://csrc.nist.gov/publications/detail/sp/800-145/final (accessed on 2 July 2020).
- Jadeja, Y.; Modi, K. Cloud computing—concepts, architecture and challenges. In Proceedings of the 2012 International Conference on Computing, Electronics and Electrical Technologies (ICCEET), Kumaracoil, India, 21–22 March 2012; pp. 877–880. [Google Scholar]
- Schertz, C.; Brown, G. Basic Considerations in Mechanizing Citrus Harvest. Trans. ASAE 1968, 11, 343–346. [Google Scholar] [CrossRef]
- Merlet, J.-P. Parallel Robots, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Patel, Y.D.; George, P.M. Parallel Manipulators Applications—A Survey. Mod. Mech. Eng. 2012, 2, 57–64. [Google Scholar] [CrossRef]
- Lin, J.; Luo, C.-H.; Lin, K.-H. Design and Implementation of a New DELTA Parallel Robot in Robotics Competitions. Int. J. Adv. Robot. Syst. 2015, 12, 153. [Google Scholar] [CrossRef]
- EcoRobotix Ltd. Available online: https://www.youtube.com/watch?v=PQK3nP8jrLA (accessed on 2 July 2020).
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; Volume 1, p. 399. [Google Scholar]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Iossifidis, I.; Steinhage, A. Controlling an 8 DOF Manipulator by Means of Neural Fields. In Proceedings of the International Conference on Field and Service Robotics FSR2001, Helsinki, Finland, 11–13 June 2001; pp. 1–7. [Google Scholar]
- Palankar, M.; De Laurentis, K.J.; Alqasemi, R.; Veras, E.; Dubey, R.; Arbel, Y.; Donchin, E. Control of a 9-DoF Wheelchair-mounted robotic arm system using a P300 Brain Computer Interface: Initial experiments. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 348–353. [Google Scholar]
- Chirikjian, G.S.; Burdick, J.W. A Hyper- Redundant Manipulator. IEEE Robot. Autom. Mag. 1994, 1, 22–29. [Google Scholar] [CrossRef]
- Tang, L.; Wang, J.; Zheng, Y.; Gu, G.; Zhu, L.; Zhu, X. Design of a cable-driven hyper-redundant robot with experimental validation. Int. J. Adv. Robot. Syst. 2017, 14, 1–12. [Google Scholar] [CrossRef]
- Shao, T.; Du, M.; Bao, G.; Zhang, L.; Yang, Q. Fruit harvesting continuum manipulator inspired by elephant trunk. Int. J. Agric. Biol. Eng. 2015, 8, 57–63. [Google Scholar]
- Motoman. Development of Dual-arm Robot MOTOMAN-SDA20D, Data Base for Noteworthy Contributions for Science and Technology, Japan. 2018. Available online: https://dbnst.nii.ac.jp/english/detail/2047 (accessed on 2 July 2020).
- ABB. YuMi—Creating an Automated Future Together. 2018. Available online: https://new.abb.com/products/robotics/industrial-robots/yumi (accessed on 2 July 2020).
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- De-An, Z.; Jidong, L.; Ji, W.; Ying, Z.; Yu, C. Design and control of an apple harvesting robot. Biosyst. Eng. 2011, 110, 112–122. [Google Scholar] [CrossRef]
- Baur, J.; Pfaff, J.; Ulbrich, H.; Villgrattner, T. Design and development of a redundant modular multipurpose agricultural manipulator. In Proceedings of the 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kaohsiung, Taiwan, 11–14 July 2012; pp. 823–830. [Google Scholar]
- Milutinovic, D.; Slavkovic, N.; Kokotovic, B.; Milutinovic, M.; Zivanovic, S.; Dimic, Z. Kinematic Modeling of Reconfigurable Parallel Robots Based on Delta Concept. J. Prod. Eng. 2012, 15, 71–74. [Google Scholar]
- Zhao, Y.; Gong, L.; Liu, C.; Huang, Y. Dual-arm Robot Design and Testing for Harvesting Tomato in Greenhouse. IFAC-PapersOnLine 2016, 49, 161–165. [Google Scholar] [CrossRef]
- Sepulveda, D.; Fernandez, R.; Navas, E.; Armada, M.; Gonzalez-De-Santos, P. Robotic Aubergine Harvesting Using Dual-Arm Manipulation. IEEE Access 2020, 8, 121889–121904. [Google Scholar] [CrossRef]
- Autopilot. Available online: http://www.trimble.com/Agriculture/autopilot.aspx (accessed on 2 July 2020).
- AutoTrac. Available online: https://www.deere.com/en_INT/products/ (accessed on 2 July 2020).
- New Holland. Available online: http://agriculture1.newholland.com/nar/en-us/about-us/whats-up/news-events/2016/new-holland-nh-drive-new-concept-autonomous-tractor (accessed on 2 July 2020).
- CASE. 2017. Available online: https://www.therobotreport.com/case-ih-displays-new-cab-less-concept-tractor/ (accessed on 2 July 2020).
- EU SCAR. Agricultural Knowledge and Innovation Systems towards the Future—A Foresight Paper; Publications Office of the European Union: Luxembourg, 2016. [Google Scholar]
- Tsolakis, N.; Bechtsis, D.; Bochtis, D. AgROS: A Robot Operating System Based Emulation Tool for Agricultural Robotics. Agronomy 2019, 9, 403. [Google Scholar] [CrossRef]
- O’Connor, M.; Bell, T.; Elkaim, G.; Parkinson, B. Automatic Steering of Farm Vehicles Using GPS. In Proceedings of the 3rd International Conference on Precision Agriculture, Minneapolis, MN, USA, 23–26 June 1996; pp. 767–777. [Google Scholar]
- Noguchi, N.; Reid, J.F.; Will, J.; Benson, E.R.; Stombaugh, T.S. Vehicle automation system based on multi-sensor integration. In Proceedings of the 1998 Annual International Meeting (ASAE), Orlando, FL, USA, 12–16 July 1998; Paper No. 983111. pp. 49085–49659. [Google Scholar]
- Pilarski, T.; Happold, M.; Pangels, H.; Ollis, M.; Fitzpatrick, K.; Stentz, A. The Demeter System for Automated Harvesting. Auton. Robot. 2002, 13, 9–20. [Google Scholar] [CrossRef]
- Stentz, A.; Dima, C.; Wellington, C.; Herman, H.; Stager, D. A System for Semi-Autonomous Tractor Operations. Auton. Robot. 2002, 13, 87–104. [Google Scholar] [CrossRef]
- Thuilot, B.; Cariou, C.; Cordesses, L.; Martinet, P. Automatic guidance of a farm tractor along curved paths, using a unique CP-DGPS. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2002; Volume 2, pp. 674–679. [Google Scholar]
- Subramanian, V.; Burks, T.F.; Arroyo, A. Development of machine vision and laser radar based autonomous vehicle guidance systems for citrus grove navigation. Comput. Electron. Agric. 2006, 53, 130–143. [Google Scholar] [CrossRef]
- Nørremark, M.; Griepentrog, H.; Nielsen, J.; Søgaard, H. The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops. Biosyst. Eng. 2008, 101, 396–410. [Google Scholar] [CrossRef]
- Emmi, L.; Gonzalez-De-Soto, M.; Pajares, G.; Gonzalez-De-Santos, P. Integrating Sensory/Actuation Systems in Agricultural Vehicles. Sensors 2014, 14, 4014–4049. [Google Scholar] [CrossRef]
- Emmi, L.; Gonzalez-De-Soto, M.; Pajares, G.; Gonzalez-De-Santos, P. New Trends in Robotics for Agriculture: Integration and Assessment of a Real Fleet of Robots. Sci. World J. 2014, 2014, 1–21. [Google Scholar] [CrossRef]
- Gonzalez-De-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G.; et al. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2016, 18, 574–614. [Google Scholar] [CrossRef]
- Bergerman, M.; Maeta, S.M.; Zhang, J.; Freitas, G.M.; Hamner, B.; Singh, S.; Kantor, G. Robot Farmers: Autonomous Orchard Vehicles Help Tree Fruit Production. IEEE Robot. Autom. Mag. 2015, 22, 54–63. [Google Scholar] [CrossRef]
- Kayacan, E.; Kayacan, E.; Ramon, H.; Saeys, W. Towards agrobots: Identification of the yaw dynamics and trajectory tracking of an autonomous tractor. Comput. Electron. Agric. 2015, 115, 78–87. [Google Scholar] [CrossRef]
- Ruckelshausen, A.; Biber, P.; Dorna, M.; Gremmes, H.; Klose, R.; Linz, A.; Rahe, R.; Resch, R.; Thiel, M.; Trautz, D.; et al. BoniRob: An autonomous field robot platform for individual plant phenotyping. Precis. Agric. 2009, 9, 841–847. [Google Scholar]
- Bawden, O.; Kulk, J.; Russell, R.; McCool, C.; English, A.; Dayoub, F.; Lehnert, C.; Perez, T. Robot for weed species plant-specific management. J. Field Robot. 2017, 34, 1179–1199. [Google Scholar] [CrossRef]
- Underwood, J.P.; Calleija, M.; Taylor, Z.; Hung, C.; Nieto, J.; Fitch, R.; Sukkarieh, S. Real-time target detection and steerable spray for vegetable crops. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)—Workshop on Robotics in Agriculture, Seattle, WA, USA, 25–30 May 2015; pp. 504–510. [Google Scholar]
- Precision Makers—Greenbot. Available online: http://www.precisionmakers.com/greenbot/ (accessed on 2 July 2020).
- Raussendorf. Raussendorf Maschinen. Available online: http://www.raussendorf.de/en/fruit-robot.html (accessed on 2 July 2020).
- Bogue, R. Robots poised to revolutionise agriculture. Ind. Robot. Int. J. 2016, 43, 450–456. [Google Scholar] [CrossRef]
- Kongskilde. New Automated Agricultural Platform—Kongskilde Vibro Crop Robotti. 2017. Available online: http://conpleks.com/robotech/new-automated (accessed on 2 July 2020).
- AGREENCULTURE—Centéol 2018 & Movies. Available online: https://www.agreenculture.net/copy-of-challenge-centeol-2018 (accessed on 2 July 2020).
- Naïo Technologies—Multifunctional Vineyard Weeding Robot—TED. Available online: https://www.naio-technologies.com/en/agricultural-equipment/vineyard-weeding-robot/ (accessed on 2 July 2020).
- Sylvester, G. (Ed.) E-Agriculture in Action: Drones for Agriculture; Food and Agriculture Organization of the United Nations and International Telecommunication Union: Bangkok, Thailand, 2018. [Google Scholar]
- Patel, P.N.; Patel, M.A.; Faldu, R.M.; Dave, Y.R. Quadcopter for Agricultural Surveillance. Adv. Electron. Electr. Eng. 2013, 3, 427–432. [Google Scholar]
- Bakker, T.; Van Asselt, K.; Bontsema, J.; Müller, J.; Van Straten, G. A path following algorithm for mobile robots. Auton. Robot. 2010, 29, 85–97. [Google Scholar] [CrossRef]
- Nagasaka, Y.; Saito, H.; Tamaki, K.; Seki, M.; Kobayashi, K.; Taniwaki, K. An autonomous rice transplanter guided by global positioning system and inertial measurement unit. J. Field Robot. 2009, 26, 537–548. [Google Scholar] [CrossRef]
- Peleg, D. Distributed Coordination Algorithms for Mobile Robot Swarms: New Directions and Challenges. In Proceedings of the Distributed Computing—IWDC 2005, Kharagpur, India, 27–30 December 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 1–12. [Google Scholar]
- Blackmore, S.; Stout, B.; Wang, M.; Runov, B. Robotic agriculture–the future of agricultural mechanisation. In Proceedings of the 5th European Conference on Precision Agriculture, Uppsala, Sweden, 9–12 June 2005; Stafford, J.V., Ed.; Wageningen Academic Publishers: Wageningen, The Netherlands, 2005; pp. 621–628. [Google Scholar]
- Cheung, B.K.-S.; Choy, K.; Li, C.-L.; Shi, W.; Tang, J. Dynamic routing model and solution methods for fleet management with mobile technologies. Int. J. Prod. Econ. 2008, 113, 694–705. [Google Scholar] [CrossRef][Green Version]
- Sørensen, C.; Bochtis, D. Conceptual model of fleet management in agriculture. Biosyst. Eng. 2010, 105, 41–50. [Google Scholar] [CrossRef]
- Bautin, A.; Simonin, O.; Charpillet, F. Towards a communication free coordination for multi-robot exploration. In Proceedings of the 6th National Conference on Control Architectures of Robots, Grenoble, France, 24–25 May 2011; Available online: https://hal.inria.fr/inria-00599605/document (accessed on 2 July 2020).
- Bouraqadi, N.; Fabresse, L.; Doniec, A. On fleet size optimization for multi-robot frontier-based exploration. In Proceedings of the 7th National Conference on Control Architectures of Robots, Nancy, France, 10–11 May 2012; pp. 1–9. Available online: http://car2012.loria.fr/files/2012/Bouraqadi-CAR2012.pdf (accessed on 2 July 2020).
- Blackmore, B.S.; Have, H.; Fountas, S. A specification of behavioural requirements for an autonomous tractor. In Proceedings of the 6th International Symposium on Fruit, Nut and Vegetable Production Engineering Conference, Potsdam, Germany, 11–14 September 2001; pp. 25–36. [Google Scholar]
- Bacco, M.; Berton, A.; Ferro, E.; Gennaro, C.; Gotta, A.; Matteoli, S.; Paonessa, F.; Ruggeri, M.; Giuseppe, V.; Zanella, A. Smart Farming: Opportunities, Challenges and Technology Enablers. In Proceedings of the 2018 IoT Vertical and Topical Summit on Agriculture—Tuscany (IOT Tuscany), Tuscany, Italy, 8–9 May 2018; pp. 1–6. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Institution | Year | Characteristic and Applications |
|---|---|---|
| School of Electrical and Information Engineering, Jiangsu University, China | 2011 | Apple harvesting manipulator [41]. |
| Technical University of Munich, Germany | 2012 | Redundant modular multipurpose agricultural manipulator [42]. |
| University of Belgrade, Faculty of Mechanical Engineering, Serbia | 2012 | Reconfigurable parallel robots based on delta concept with application in agriculture [43]. |
| Key Laboratory of E&M—Zhejiang University of Technology, China | 2015 | Continuum manipulator for agriculture [37]. |
| School of Mechanical Engineering, Shanghai Jiao Tong University, China | 2016 | Dual-arm robot for harvesting tomato in greenhouses [44]. |
| Centre for Automation and Robotics (UPM-CSIC) | 2020 | Dual-arm manipulation for aubergine harvesting [45]. |
| Institution/Year | Characteristic and Applications |
|---|---|
| Stanford University (United States), 1996 | An automatic control system was developed and tested on a large farm tractor using four GPS antennas [52]. |
| University of Illinois (United States), 1998 | A guidance system created by integrating a sensor based on machine vision, a real-time kinematics GPS (RTK-GPS), and a geometric direction sensor. The fusion integration methodology was based on an extended Kalman filter and a two-dimensional probability density function statistical method [53]. |
| Carnegie-Mellon University (United States)—Demeter project, 1999 | This is a self-propelled hay harvester for agricultural operations. The positional data are fused from a differential global positioning system (GPS), a wheel encoder (dead-reckoning), and gyroscopic system sensors [54]. |
| Carnegie-Mellon University (United States)—Autonomous Agricultural Spraying project, 2002 | The objective was to automate ground-based vehicles for pesticide spraying to achieve a system that was significantly cheaper, safer, and friendlier to the environment. A remote operator was able to supervise the nighttime operation of up to four spraying vehicles [55]. |
| LASMEA-CEMAGREF (France), 2001 | This study investigated the possibility of achieving vehicle guiding using a carrier phase differential GPS as the only sensor. The vehicle heading was derived according to a Kalman state reconstructor, and a nonlinear velocity independent control law was designed that relied on chained systems properties [56]. |
| University of Florida (United States), 2006 | An autonomous guidance system for use in a citrus grove was developed on the basis of machine vision (average guidance error of approximately 0.028 m) and laser radar (average guidance error of approximately 0.025 m). The system was tested on a curved path at a speed of approximately 3.1 m s−1 [57]. |
| University of Aarhus and the University of Copenhagen (Denmark), 2008 | An automatic intra-row weed control system was connected to an unmanned tractor and linked via a hydraulic side shifting frame attached to the rear three-point hitch of the vehicle [58]. |
| RHEA (Robot Fleets for Highly Effective Agriculture and Forestry Management) consortium, 2014 | Automation and sensor integration of a fleet (three units) of medium-sized tractors that cooperated and collaborated in physical/chemical weed control and pesticide applications for trees [59,60,61]. |
| Carnegie-Mellon University (United States), 2015 | Self-driving orchard vehicles for orchard tasks, i.e., tree pruning and training, blossom and fruit thinning, fruit harvesting, mowing, spraying, and sensing [62]. |
| University of Leuven (Belgium), 2015 | Tractor guidance using model predictive control for yaw dynamics [63]. |
| Vehicle/Year | Characteristics and Applications |
|---|---|
| BoniRob/2009 | Steering scheme: Independent steering/traction wheels in 1-DOF legs (wheel-legs). |
| Applications: General agricultural tasks—BoniRob is based on an app concept similar to the intelligent phone scheme that gives third parties the possibility to integrate their own modules for specific applications [64]. | |
| AgBot II/2014 | Steering scheme: Two front skid steering wheels and two rear caster wheels. |
| Applications: Fertilizing tasks in large-horticultural crops; weed management: detects and classifies weeds. Destroy weeds using mechanically or chemically devices [65]. | |
| Ladybird/2015 | Steering scheme: Independent steering wheels. |
| Applications: Assessment of crop using hyperspectral cameras, thermal and infrared detecting systems, panoramic and stereovision cameras, LIDAR, and GPS [66]. | |
| Greenbot/Precision Makers 2015 | Steering scheme: Independent steering/traction wheels. |
| Applications: Regularly repeated tasks in agriculture and horticulture [67]. | |
| Cäsar/2016 | Steering scheme: Independent steering/traction wheels. |
| Applications: Autonomous use in enclosed fruit plantations and vineyards. Pest and soil management, fertilization, harvesting, and transport [68]. | |
| RIPPA/2016 | Steering scheme: Independent steering/traction wheels. |
| Applications: Vegetable growing industry; spot spraying of weeds using a directed micro-dose of liquid [69]. | |
| Vibro Crop Robotti/2017 | Steering scheme: Skid steering wheels. |
| Applications: Precision seeding and mechanical row crop cleaning [70]. | |
| Céeol/2019 | Steering scheme: Skid steering trucks. |
| Applications: Furrow preparation, fertilization, weeding, harvesting, soil analysis [71]. | |
| Naïo/2019 | Steering scheme: Independent steering/traction wheels. |
| Applications: Mowing, leaf thinning, trimming, etc., for vineyards [72]. |
| Manipulator/Status (Year) | Type | DOF | Dimensions (m) | Speed | Payload (kg) |
|---|---|---|---|---|---|
| CROPS/Prototype (2014) | Serial/Redundant | 9 | 1.53 (maximum extension) | 15 s/piece | ≈0.75 |
| ABB IRB-360-1/Commercial (2012) | Delta | 4 | Radius (2): 0.4 Height: 0.2 | 10 m s−1 | 1 |
| FESTO Elephant trunk/Prototype (2010) | Continuum | -- | Length: 0.85 m | -- | 3 |
| Yaskawa SDA5D/Commercial (2018) | Dual-Arm | 15 (1) | Horizontal. reach: 0.845 m Vertical reach: 1.118 m | 200°/s (3) | 5 kg per arm |
| Vehicle (Year) | Type | Dimensions (m) | Weight (Kg) | Speed (m s−1) | Payload (kg) |
|---|---|---|---|---|---|
| BoniRob (2009) | Independent steering | 2.8 × 2.4 × 2.2 | 1100 | 1.5 | 150 |
| AgBot II (2014) | Skid and caster wheels | 3 × 2 × 1 | 400 | 2.7 | 200 |
| Ladybird (2015) | Independent steering | -- | 325 kg | 1.2 | -- |
| Greenbot (2015) | Independent steering | 1 × 1.8 × 0.47 | -- | 1 | 1500 kg |
| Cäsar (2016) | Independent steering | 3 × 1.3 × 0.92 | 1000 | 3.33 | 2000 |
| Céeol (2019) | Skid trucks | 0.80 × 1.8 × 1 | 550 | 3.33 | 350/700 |
| Naïo (2019) | Independent steering | Length: 2.30 Width: 1.5–2 Height: 1.5–2 | 800 | 1.12 | 240 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonzalez-de-Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field Robots for Intelligent Farms—Inhering Features from Industry. Agronomy 2020, 10, 1638. https://doi.org/10.3390/agronomy10111638
Gonzalez-de-Santos P, Fernández R, Sepúlveda D, Navas E, Emmi L, Armada M. Field Robots for Intelligent Farms—Inhering Features from Industry. Agronomy. 2020; 10(11):1638. https://doi.org/10.3390/agronomy10111638
Chicago/Turabian StyleGonzalez-de-Santos, Pablo, Roemi Fernández, Delia Sepúlveda, Eduardo Navas, Luis Emmi, and Manuel Armada. 2020. "Field Robots for Intelligent Farms—Inhering Features from Industry" Agronomy 10, no. 11: 1638. https://doi.org/10.3390/agronomy10111638
APA StyleGonzalez-de-Santos, P., Fernández, R., Sepúlveda, D., Navas, E., Emmi, L., & Armada, M. (2020). Field Robots for Intelligent Farms—Inhering Features from Industry. Agronomy, 10(11), 1638. https://doi.org/10.3390/agronomy10111638