
Modeling of Twin Screw Extrusion of Polymeric Materials



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Twin Screw Extrusion
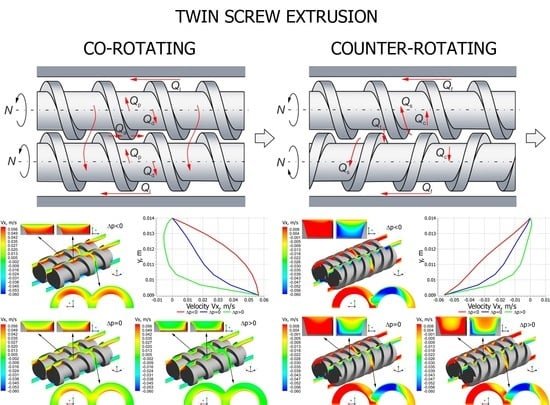
2.1. Co-Rotating Twin Screw Extrusion
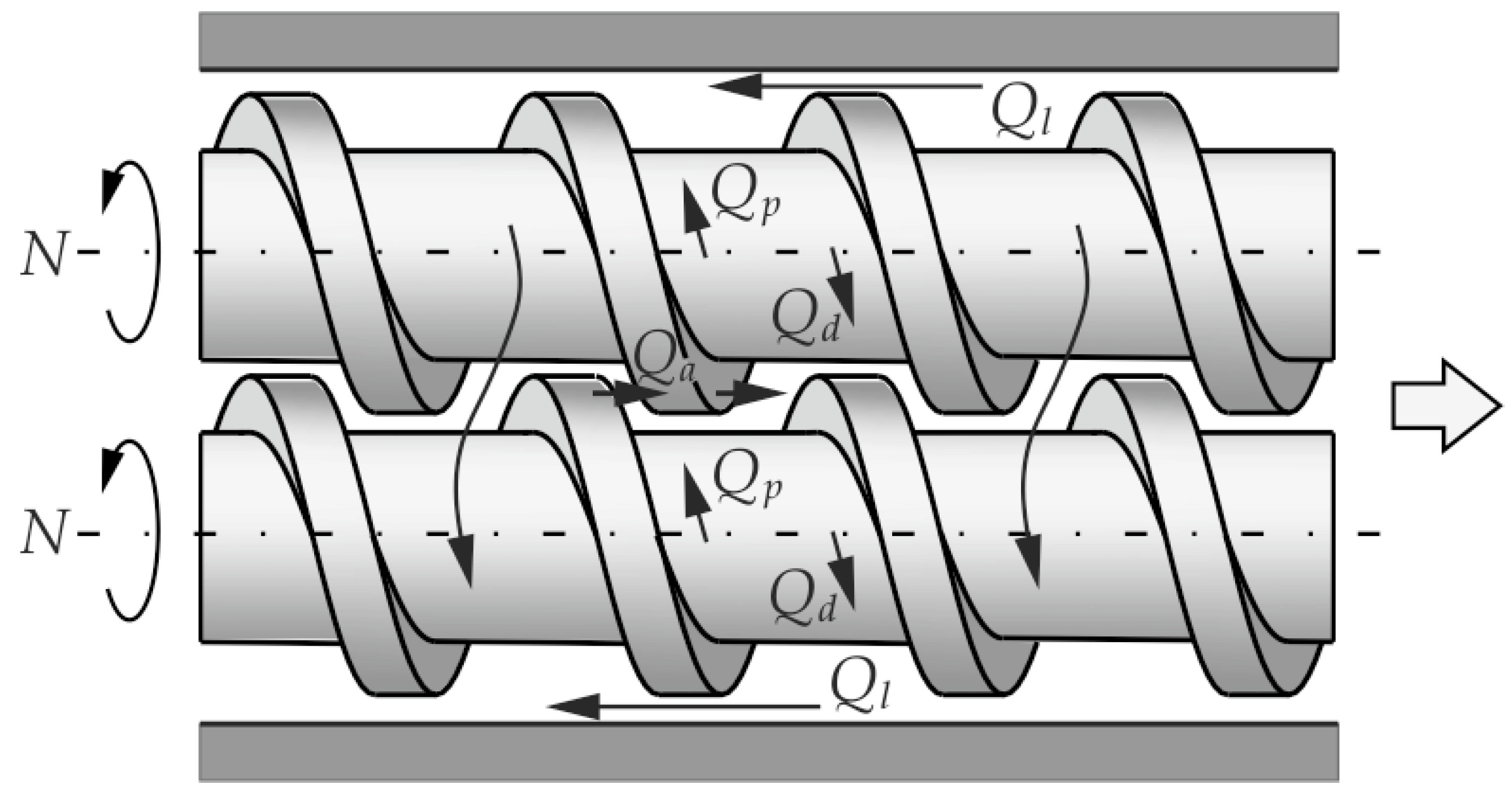
2.2. Counter-Rotating Twin Screw Extrusion
3. Process Modeling
3.1. Solid Transport
3.2. Plasticating
3.3. Flow of Molten Polymer
4. CFD Modeling of Twin Screw Extrusion
- −
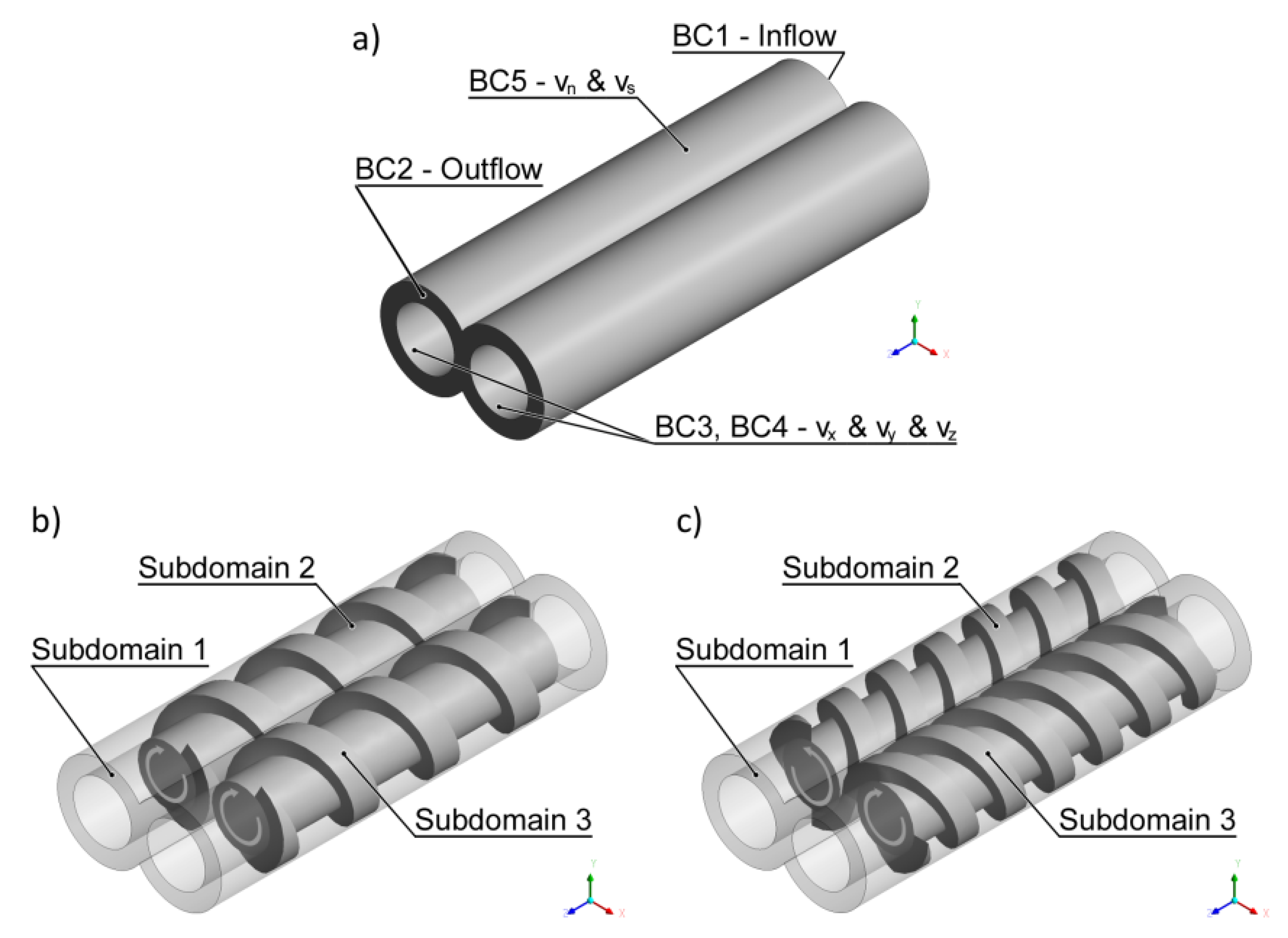
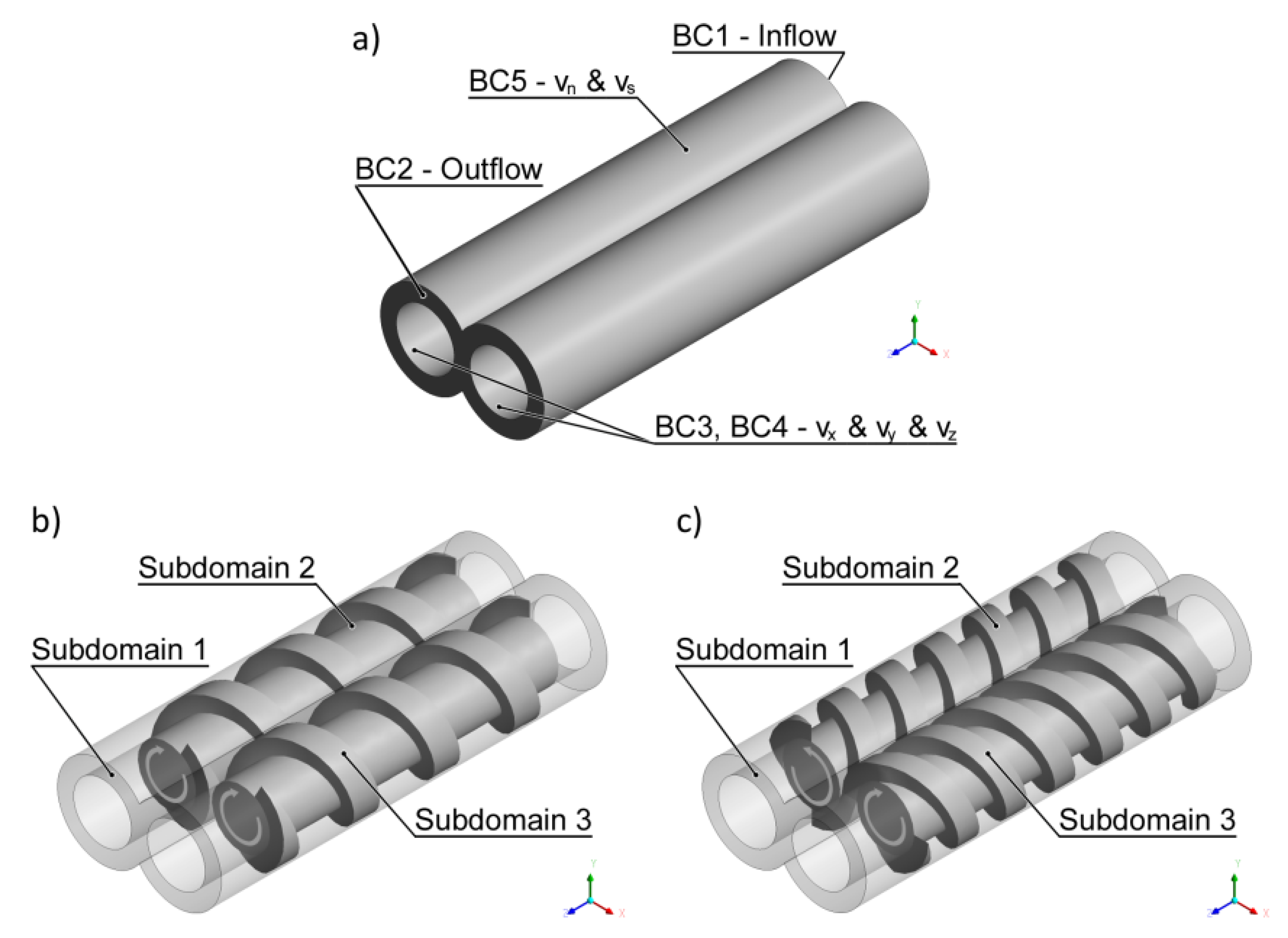
- at the inlet to the flow domain: boundary BC1—inflow, the flow rate (Qin) = (Q) is imposed,
- −
- at the outlet of the flow domain: boundary BC2—outflow, vanishing normal forces and tangential velocities are imposed (fn and vs) = (0, 0), which means that the flow rate (Qout) = (Q) is imposed,
- −
- on the screw domain: boundary BC3—Cartesian velocity, Cartesian velocities are imposed (vx and vy and vz) = (–N)—for co-rotating extrusion, which means that the screw is rotated at the screw speed (N) counterclockwise, or (vx and vy and vz) = (N)—for counter-rotating extrusion, which means that the screw is rotated clockwise,
- −
- on the screw domain: boundary BC4—Cartesian velocity, Cartesian velocities are imposed (vx and vy and vz) = (–N) for both co-rotating and counter-rotating extrusion, which means that the screw is rotated at the screw speed (N) counterclockwise,
- −
- on the barrel wall: boundary BC5—zero wall velocity, vanishing normal and tangential velocities are imposed (vn and vs) = (0, 0), which means that the velocity vanishes at the barrel wall.
- −
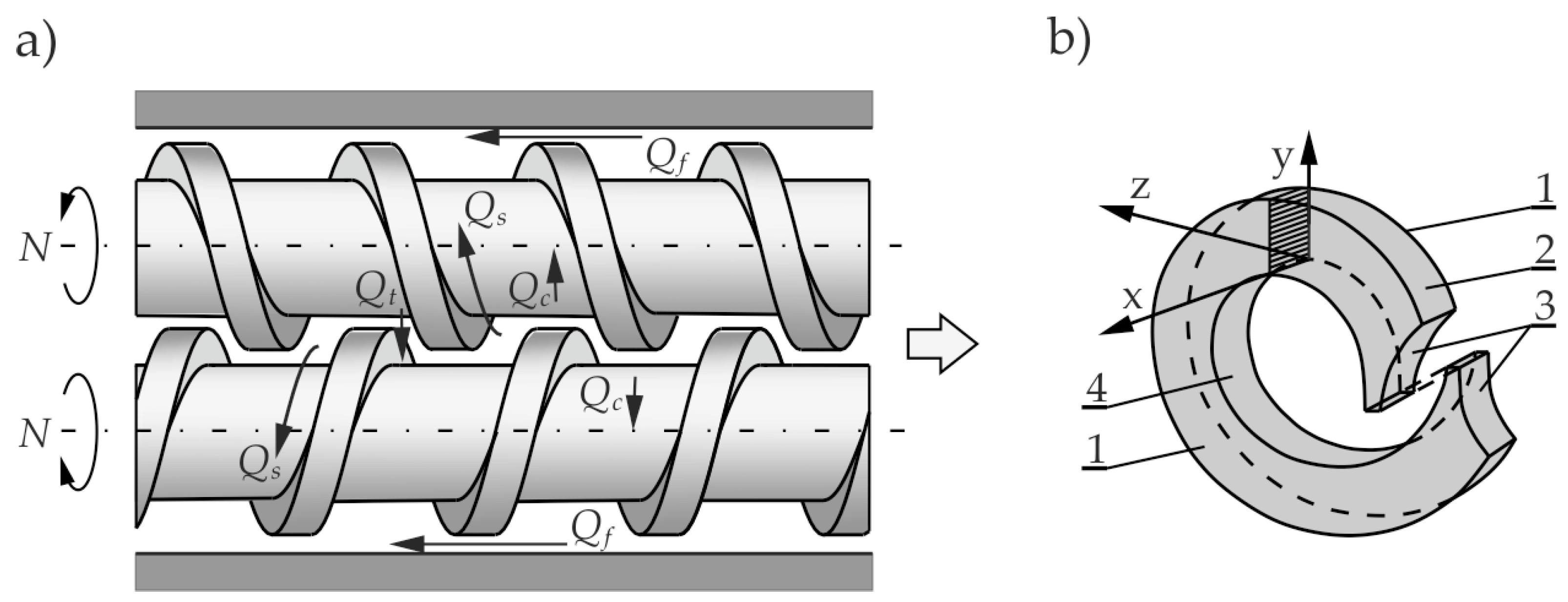
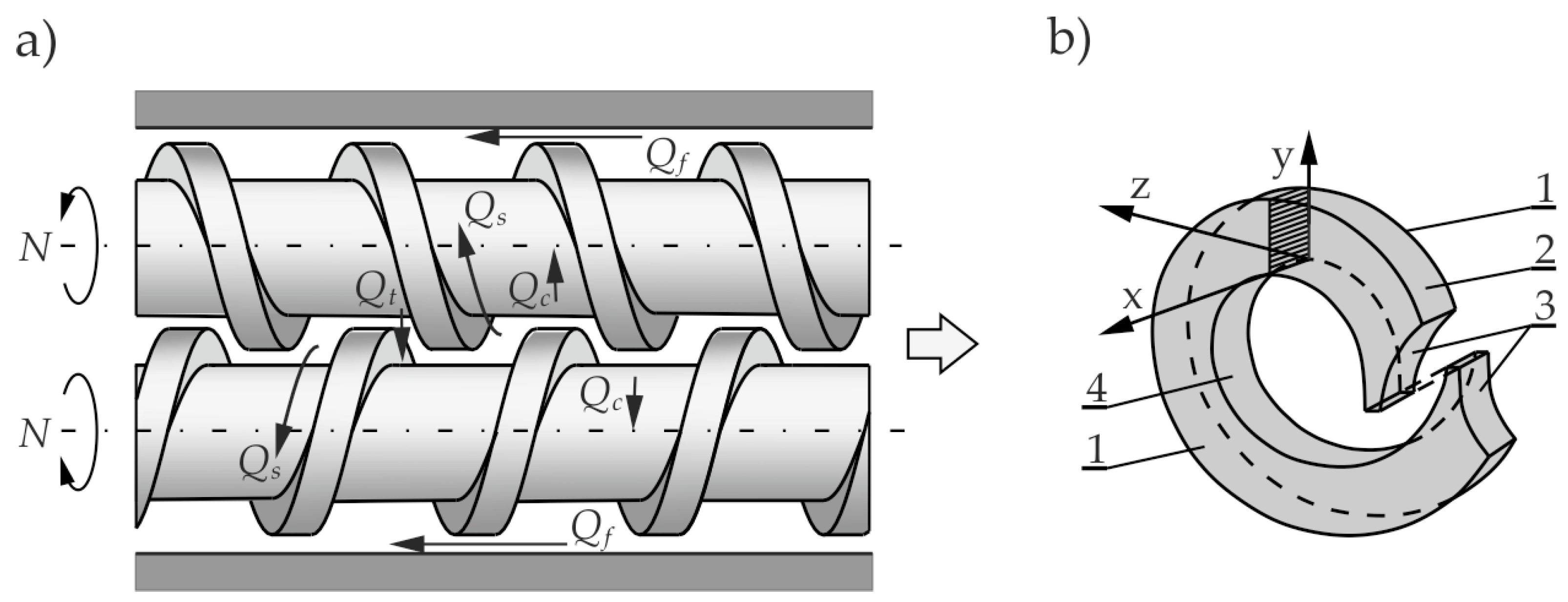
- the calendering flow Qc in the gap between the screw root and the screw flight,
- −
- the flight flow Qf in the gap between the screw flight and the barrel,
- −
- the back pressure inter-screw flow Qt (tetrahedron flow) in the tetrahedral gap between the screw flight flanks, in the radial direction,
- −
- the side flow Qs in the gap between the screw flight flanks, in the tangential direction.
5. Computer Models of Twin Screw Extrusion
6. Future Concepts
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fisher, E.G. Extrusion of Plastics; Iliffe Books Ltd.: London, UK, 1958. [Google Scholar]
- Schenkel, G. Kunststoff-Extrudertechnik; Carl Hanser Verlag: Munich, Germany, 1963. [Google Scholar]
- McKelvey, J.M. Polymer Processing; John Wiley & Sons Inc.: New York, NY, USA, 1962; ISBN 978-0471584438. [Google Scholar]
- Fenner, R.T. Extruder Screw Design; Iliffe Books Ltd.: London, UK, 1970. [Google Scholar]
- Tadmor, Z.; Klein, I. Engineering Principles of Plasticating Extrusion; Van Nostrand Reinhold Company: New York, NY, USA, 1970; ISBN 978-0442156350. [Google Scholar]
- Potente, H. Auslegen von Schneckenmaschinen Baureihen; Carl Hanser Verlag: Munich, Germany, 1981; ISBN 978-3446133846. [Google Scholar]
- Hensen, F.; Knappe, W.; Potente, H. Handbuch der Kunststoff-Extrusiontechnik. Grundlagen; Carl Hanser Verlag: Munich, Germany, 1989; ISBN 978-3-44614-339-5. [Google Scholar]
- White, J.L. Rubber Processing; Hanser Publishers: Munich, Germany, 1995; ISBN 978-3446166004. [Google Scholar]
- White, J.L.; Potente, H. Screw Extrusion. Science and Technology; Hanser Publishers: Munich, Germany, 2003; ISBN 978-3-446-19624-7. [Google Scholar]
- Tadmor, Z.; Gogos, C.G. Principles of Polymer Processing, 2nd ed.; John Wiley & Sons Inc.: New York, NY, USA, 2006; ISBN 978-0-471-38770-1. [Google Scholar]
- White, J.L.; Kim, E.K. Twin Screw Extrusion. Technology and Principles, 2nd ed.; Hanser Publishers: Munich, Germany, 2010; ISBN 978-1569904718. [Google Scholar]
- Vlachopoulos, J. Polymer Rheology and Extrusion; McMaster University: Hamilton, ON, Canada, 2011. [Google Scholar]
- Rauwendaal, C. Polymer Extrusion, 5th ed.; Carl Hanser Verlag: Munich, Germany, 2014; ISBN 978-1-56990-516-6. [Google Scholar]
- Lafleur, P.G.; Vergnes, B. Polymer Extrusion; ISTE-Wiley: London, UK, 2014; ISBN 1848216505. [Google Scholar]
- Vlachopoulos, J.; Polychronopoulos, N.D. Understanding Rheology and Technology of Polymer Extrusion; Polydynamic: Dundas, ON, Canada, 2019; ISBN 978-0-9952407-2-8. [Google Scholar]
- Chung, C.I. Extrusion of Polymers. Theory and Practice, 3rd ed.; Carl Hanser Verlag: Munich, Germany, 2020; ISBN 978-1-56990-609-5. [Google Scholar]
- Kohlgrüber, K. Co-Rotating Twin-Screw Extruders: Fundamentals; Hanser Publisher: New York, NY, USA, 2020; ISBN 978-1-56990-747-4. [Google Scholar]
- Kohlgrüber, K. Co-Rotating Twin-Screw Extruders: Applications; Hanser Publisher: New York, NY, USA, 2020; ISBN 978-1-56990-781-8. [Google Scholar]
- Noriega, M.; Rauwendaal, C. Troubleshooting the Extrusion Process. A Systematic Approach to Solving Plastic Extrusion Problems; Hanser Publisher: New York, NY, USA, 2020; ISBN 978-1-56990-776-4. [Google Scholar]
- Campbell, G.A.; Spalding, M.A. Analyzing and Troubleshooting Single-Screw Extruders; Carl Hanser Verlag: Munich, Germany, 2021; ISBN 978-1-56990-784-9. [Google Scholar]
- Pearson, J.R.A. Mechanical Principles of Polymer Melt Processing; Pergamon Press: Oxford, UK, 1966. [Google Scholar]
- Torner, R.V. Grundprozesse der Verarbeitung von Polymeren; VEB Deutscher Verlag: Leipzig, Germany, 1974. [Google Scholar]
- Middleman, S. Fundamentals of Polymer Processing; McGraw-Hill: New York, NY, USA, 1977; ISBN 978-0070418516. [Google Scholar]
- Rao, N.S. Computer Aided Design of Plasticating Screws: Programs in Fortran and Basic; Hanser Publishers: New York, NY, USA, 1986; ISBN 978-1569900826. [Google Scholar]
- Baird, D.G.; Collias, D.I. Polymer Processing: Principles and Design; Butterworth-Heinemann: Oxford, UK, 1995; ISBN 978-0750691055. [Google Scholar]
- Osswald, T.; Hernandez-Ortiz, J.P. Polymer Processing. Modeling and Simulation; Carl Hanser Verlag: Munich, Germany, 2006; ISBN 978-3-446-40381-9. [Google Scholar]
- Agassant, J.F.; Avenas, P.; Carreau, P.J.; Vergnes, B.; Vincent, M. Polymer Processing. Principles and Modelling, 2nd ed.; Carl Hanser Verlag: Munich, Germany, 2017; ISBN 978-1-56990-605-7. [Google Scholar]
- Bergen, J.T.; Bernhardt, E.C.; Beyer, C.S.; Carley, J.F.; Cash, F.M.; Dahl, R.B.; Darnell, W.H.; Hearst, T.M.; Kovach, G.P.; Marshall, D.I.; et al. Processing of Thermoplastic Materials; Bernhardt, E.C., Ed.; Reinhold Publishing Corporation: New York, NY, USA, 1959. [Google Scholar]
- Pearson, J.R.A.; Crochet, M.J.; Walters, K.; Tanner, R.I.; Fenner, R.T.; Richardson, S.M.; Denn, M.M.; Petrie, C.J.S.; Kistler, S.F.; Scriven, L.E.; et al. Computational Analysis of Polymer Processing; Pearson, J.R.A., Richardson, S.M., Eds.; Elsevier Publisher: London, UK, 1983; ISBN 978-94-009-6634-5. [Google Scholar]
- Barone, M.R.; Forger, R.D.; Bernhardt, E.C.; Tucker, C.L.; Kamal, M.R.; Michael, E.R.; Lee, C.-C.; Castro, J.M.; Richardson, S.M.; Güceri, S.I.; et al. Fundamentals of Computer Modeling for Polymer Processing; Tucker, C.T., Ed.; Hanser Publishers: New York, NY, USA, 1989; ISBN 978-3446147041. [Google Scholar]
- Erwin, L.; Elmendorp, J.J.; Tucker, C.L.; Rauwendaal, C.; Dreiblatt, A.; Eise, K.; Jansen, L.P.B.M.; Nichols, R.; Manas-Zloczower, I.; Kearney, M.R.; et al. Mixing in Polymer Processing; Rauwendaal, C., Ed.; M. Dekker: New York, NY, USA, 1991; ISBN 978-0824785215. [Google Scholar]
- Bernhardt, E.C.; Bertacchi, G.; Crochet, M.J.; Debbaut, B.; Harms, R.; Mitsoulis, E.; O’Brien, K.T.; Rao, N.S.; Vlachopoulos, J.; Silvi, N.; et al. Computer Modeling for Extrusion and Other Continuous Polymer Processes; O’Brien, K.T., Ed.; Hanser Publishers: New York, NY, USA, 1992; ISBN 978-1569900680. [Google Scholar]
- Agassant, J.F.; Andersen, P.G.; Anderson, P.D.; Ban, K.; Bousmina, M.; Bumm, S.H.; Canedo, E.L.; Elemans, P.H.M.; Feke, D.L.; Feng, L.-F.; et al. Mixing and Compounding of Polymers. Theory and Practice, 2nd ed.; Manas-Zloczower, I., Ed.; Carl Hanser Verlag: Munich, Germany, 2009; ISBN 978-3-446-40773-2. [Google Scholar]
- Wilczyński, K. Rheology in Polymer Processing. Modeling and Simulation; Carl Hanser Verlag: Munich, Germany, 2021; ISBN 978-1-56990-660-6. [Google Scholar]
- Darnell, W.H.; Mol, E.A.J. Solids Conveying in Extruders. SPE J. 1956, 20, 20–29. [Google Scholar]
- Tadmor, Z.; Broyer, E. Solids Conveying in Screw Extruders—Part I: A Modified Isothermal Model. Polym. Eng. Sci. 1972, 12, 12–24. [Google Scholar] [CrossRef]
- Tadmor, Z.; Broyer, E. Solids Conveying in Screw Extruders—Part II: A Modified Non-Isothermal Model. Polym. Eng. Sci. 1972, 12, 376–378. [Google Scholar] [CrossRef]
- Leßmann, J.-S.; Weddige, R.; Schöppner, V.; Porsch, A. Modelling the Solids Throughput of Single Screw Smooth Barrel Extruders as a Function of the Feed Section Parameters. Int. Polym. Process. 2012, 27, 469–477. [Google Scholar] [CrossRef]
- Trippe, J.; Schöppner, V. Modeling of Solid Conveying Pressure Throughput Behavior of Single Screw Smooth Barrel Extruders under Consideration of Backpressure and High Screw Speeds. Int. Polym. Process. 2018, 33, 486–496. [Google Scholar] [CrossRef]
- Pohl, T.C.; Potente, H. Simulation and Analyses of the Polymer-Pellet-Flow into the First Section of a Single Screw. SPE ANTEC Tech. Pap. 2001, 59, 185–189. [Google Scholar]
- Moysey, P.A.; Thompson, M.R. Investigation of Solids Transport in a Single-Screw Extruder Using a 3-D Discrete Particle Simulation. Polym. Eng. Sci. 2004, 44, 2203–2215. [Google Scholar] [CrossRef]
- Moysey, P.A.; Thompson, M.R. Modelling the Solids Inflow and Solids Conveying of Single-Screw Extruders Using the Discrete Element Method. Powder Technol. 2005, 153, 95–107. [Google Scholar] [CrossRef]
- Moysey, P.A.; Thompson, M.R. Determining the Collision Properties of Semi-Crystalline and Amorphous Thermoplastics for DEM Simulations of Solids Transport in an Extruder. Chem. Eng. Sci. 2007, 62, 3699–3709. [Google Scholar] [CrossRef]
- Moysey, P.A.; Thompson, M.R. Discrete Particle Simulations of Solids Compaction and Conveying in a Single-Screw Extruder. Polym. Eng. Sci. 2008, 48, 62–73. [Google Scholar] [CrossRef]
- Carrot, C.; Guillet, J.; May, J.F.; Puaux, J.-P. Modeling of the Conveying of Solid Polymer in the Feeding Zone of Intermeshing Co-Rotating Twin Screw Extruders. Polym. Eng. Sci. 1993, 33, 700–708. [Google Scholar] [CrossRef]
- Bawiskar, S.; White, J.L. Solids Conveying and Melting in a Starve Fed Self-Wiping Co-Rotating Twin Screw Extruder. Int. Polym. Process. 1995, 10, 105–110. [Google Scholar] [CrossRef]
- Potente, H.; Melisch, U.; Palluch, K.P. A Physico-Mathematical Model for Solids Conveying in Co-Rotating Twin Screw Extruders. Int. Polym. Process. 1996, 11, 29–41. [Google Scholar] [CrossRef]
- Wong, A.C.-Y.; Liu, T.; Zhu, F. Solid Transportation in the Feeding Zone of Intermeshing Co-Rotating Twin-Screw Extruders. J. Polym. Res. 2000, 7, 135–147. [Google Scholar] [CrossRef]
- Doboczky, Z. Theoretische and wirkliche Ausstoßleistung der Doppelschnecken Extruder. Plastverarbeiter 1965, 16, 395–400. [Google Scholar]
- Wilczyński, K.; White, J.L. Experimental Study of Melting in an Intermeshing Counter-Rotating Twin Screw Extruder. Int. Polym. Process. 2001, 16, 257–262. [Google Scholar] [CrossRef]
- Maddock, B.H. A Visual Analysis of Flow and Mixing in Extruder Screws. SPE J. 1959, 15, 383–389. [Google Scholar]
- Street, L.F. Plastifying Extrusion. Intern. Plast. Eng. 1961, 1, 289–296. [Google Scholar]
- Wilczyński, K.; Lewandowski, A.; Wilczyński, K.J. Experimental Study for Starve-Fed Single Screw Extrusion of Thermoplastics. Polym. Eng. Sci. 2012, 52, 1258–1270. [Google Scholar] [CrossRef]
- Wilczyński, K.; White, J.L. Melting Model for Intermeshing Counter-Rotating Twin-Screw Extruders. Polym. Eng. Sci. 2003, 43, 1715–1726. [Google Scholar] [CrossRef]
- Tadmor, Z. Fundamentals of Plasticating Extrusion. I. A Theoretical Model for Melting. Polym. Eng. Sci. 1966, 6, 185–190. [Google Scholar] [CrossRef]
- Marshall, D.I.; Klein, I. Fundamentals of Plasticating Extrusion. II. Experiments. Polym. Eng. Sci. 1966, 6, 191–197. [Google Scholar] [CrossRef]
- Tadmor, Z.; Duvdevani, I.J.; Klein, I. Melting in Plasticating Extruders Theory and Experiments. Polym. Eng. Sci. 1967, 7, 198–217. [Google Scholar] [CrossRef]
- Tadmor, Z.; Klein, I. Computer Programs for Plastic Engineers; Reinhold Book Corporation: New York, NY, USA, 1968. [Google Scholar]
- Kacir, L.; Tadmor, Z. Solids Conveying in Screw Extruders. Part III: The Delay Zone. Polym. Eng. Sci. 1972, 12, 387–395. [Google Scholar] [CrossRef]
- Wilczyński, K.; Nastaj, A.; Lewandowski, A.; Wilczyński, K.J.; Buziak, K. Fundamentals of Global Modeling for Polymer Extrusion. Polymers 2019, 11, 2106. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, T.; Wong, A.C.-Y.; Zhu, F. Prediction of Screw Length Required for Polymer Melting and Melting Characteristics. Int. Polym. Process. 2001, 16, 113–123. [Google Scholar] [CrossRef]
- Noriega, M.D.P.; Osswald, A.T.; Ferrier, N. In Line Measurement of the Polymer Melting Behavior in Single Screw Extruders. J. Polym. Eng. 2004, 24, 557–578. [Google Scholar] [CrossRef]
- Wang, D.; Min, K. In-Line Monitoring and Analysis of Polymer Melting Behavior in an Intermeshing Counter-Rotating Twin-Screw Extruder by Ultrasound Waves. Polym. Eng. Sci. 2005, 45, 998–1010. [Google Scholar] [CrossRef]
- Aigner, M.; Praher, B.; Kneidinger, C.; Miethlinger, J.; Steinbichler, G. Verifying the Melting Behavior in Single-Screw Plasticization Units Using a Novel Simulation Model and Experimental Method. Int. Polym. Process. 2014, 29, 624–634. [Google Scholar] [CrossRef]
- Yu, H.; Xu, B.; Wu, H.; Turng, L.-S.; Wang, M. A Visualization of Flow Patterns of Viscoelastic Fluid Partially Filled in a Co-Rotating Non-Twin Screw Extruder. Polym. Eng. Sci. 2019, 59, E24–E32. [Google Scholar] [CrossRef]
- Viriyayuthakorn, M.; Kassahun, B. A Three Dimensional Model for Plasticating Extrusion Screw Design. SPE-ANTEC Tech. Pap. 1985, 31, 81–84. [Google Scholar]
- Syrjäla, S. A New Approach for the Simulation of Melting in Extruders. Int. Commun. Heat Mass 2000, 27, 623–634. [Google Scholar] [CrossRef]
- Altinkaynak, A.; Gupta, M.; Spalding, M.A.; Crabtree, S.L. Melting in a Single Screw Extruder: Experiments and 3D Finite Element Simulations. Int. Polym. Process. 2011, 26, 182–196. [Google Scholar] [CrossRef]
- Hopmann, C.; Kremer, C.; Grammel, S. Predicting the Melting Behavior within a Single Screw Extruder Using 3D FVM simulation. In Proceedings of the Polymer Processing Society 28th Annual Meeting (PPS-28), Pattaya, Thailand, 11–15 December 2012. [Google Scholar]
- Kazmer, D.O.; Grosskopf, C.M.; Venoor, V. Vortical Fountain Flows in Plasticating Screws. Polymers 2018, 10, 823. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lewandowski, A.; Wilczyński, K. General Model of Polymer Melting in Extrusion Process. Polimery 2018, 63, 444–452. [Google Scholar] [CrossRef]
- Todd, D.B. Melting of Plastics in Kneading Blocks. SPE ANTEC Tech. Pap. 1992, 38, 2528–2536. [Google Scholar] [CrossRef]
- Sakai, T. The Development of On-line Techniques and Novel Processing Systems for the Monitoring and Handling of the Evolution of Microstructure in Nonreactive and Reactive Polymer Systems. Adv. Polym. Technol. 1995, 14, 277–290. [Google Scholar] [CrossRef]
- Wong, A.C.-Y.; Liu, T.; Zhu, F. Qualitative Study on Intermeshing Co-Rotating Twin Screw Extrusion Using Novel Visual Technique. Plast. Rubber Compos. Process. Appl. 1997, 26, 271–277. [Google Scholar]
- Carneiro, O.S.; Caldeira, G.; Covas, J.A. Flow Patterns in Twin Screw Extruders. J. Mater. Process. Technol. 1999, 92, 309–315. [Google Scholar] [CrossRef]
- Carneiro, O.S.; Poulesquen, A.; Covas, J.A.; Vergnes, B. Visualization and Analysis of the Flow along the Kneading Block of a Twin-Screw Extruder. Int. Polym. Process. 2002, 17, 301–308. [Google Scholar] [CrossRef]
- Gogos, C.G.; Tadmor, Z.; Kim, M.H. Melting Phenomena and Mechanisms in Polymer Processing Equipment. Adv. Polym. Technol. 1998, 17, 285–305. [Google Scholar] [CrossRef]
- Qian, B.; Gogos, C.G. The Importance of Plastic Energy Dissipation (PED) to the Heating and Melting of Polymer Particulates in Intermeshing Co-Rotating Twin-Screw Extruders. Adv. Polym. Technol. 2000, 19, 287–299. [Google Scholar] [CrossRef]
- Gogos, C.G.; Qian, B. A Predictive Melting Model for Polymer Particulates in Co-Rotating Twin Screw Extruders. SPE ANTEC Tech. Pap. 2001, 47, 5. [Google Scholar]
- Qian, B.; Todd, D.B.; Gogos, C.G. Plastic Energy Dissipation and its Role on Heating/Melting of Single-Component Polymers and Multi-Component Polymer Blends. Adv. Polym. Technol. 2003, 22, 85–95. [Google Scholar] [CrossRef]
- Potente, H.; Melisch, U. Theoretical and Experimental Investigations of the Melting of Pellets in Co-Rotating Twin-Screw Extruders. Int. Polym. Process. 1996, 11, 101–108. [Google Scholar] [CrossRef]
- Bawiskar, S.; White, J.L. Melting Model for Modular Self Wiping Co-Rotating Twin Screw Extruders. Polym. Eng. Sci. 1998, 38, 727–740. [Google Scholar] [CrossRef]
- Vergnes, B.; Delacour, M.L.; Souveton, G.; Bouvier, J.M. A Study of Polymer Melting in a Co-Rotating Twin Screw Extruder. In Proceedings of the International Polymer Processing Society 15th Annual Meeting (PPS-15), Hertogenbosch, The Netherlands, 31 May–4 June 1999. [Google Scholar]
- Vergnes, B.; Souveton, G.; Delacour, M.L.; Ainser, A. Experimental and Theoretical Study of Polymer Melting in a Co-Rotating Twin Screw Extruder. Int. Polym. Process. 2001, 16, 351–362. [Google Scholar] [CrossRef]
- Zhu, L.; Narh, K.A.; Geng, X. Modeling of Particle-Dispersed Melting Mechanism and its Application in Co-Rotating Twin-Screw Extrusion. J. Polym. Sci. B Polym. Phys. 2001, 39, 2461–2468. [Google Scholar] [CrossRef]
- Teixeira, C.F. Designing Screws for Polymer Compounding in Twin-Screw Extruders. Ph.D. Thesis, University de Minho, Braga, Portugal, 2013. [Google Scholar]
- Janssen, L.P.B.M. Twin Screw Extrusion; Elsevier Scientific Pub. Co.: Amsterdam, The Netherlands, 1978; ISBN 978-0444416292. [Google Scholar]
- Lim, S.; White, J.L. Flow Mechanisms, Material Distributions and Phase Morphology Development in a Modular Intermeshing Counter-Rotating Twin Screw Extruder of Leistritz Design. Int. Polym. Process. 1994, 9, 33–45. [Google Scholar] [CrossRef]
- Cho, J.W.; White, J.L. Melting and Blending in a Modular Co-Rotating/Counter-Rotating Twin Screw Extruder. Int. Polym. Process. 1996, 11, 21–28. [Google Scholar] [CrossRef]
- Wang, D.; Min, K. Experiments and Analysis of Effect of Calender Gaps on Melting of PVC Powders in an Intermeshing Counter-Rotating Twin-Screw Extruder. Int. Polym. Process. 2006, 21, 17–23. [Google Scholar] [CrossRef]
- Wilczyński, K.; Lewandowski, A.; Wilczyński, K.J. Experimental Study of Melting of LDPE/PS Polyblend in an Intermeshing Counter-Rotating Twin Screw Extruder. Polym. Eng. Sci. 2012, 52, 449–458. [Google Scholar] [CrossRef]
- Rowell, H.S.; Finlayson, D. Screw Viscous Pumps. Engineering 1928, 126, 249. [Google Scholar]
- Carley, J.F.; Mallouk, R.S.; McKelvey, J.M. Simplified Flow Theory for Screw Extruders. Ind. Eng. Chem. 1953, 45, 974–978. [Google Scholar] [CrossRef]
- Carley, J.F.; Strub, R.A. Basic Concepts of Extrusion. Ind. Eng. Chem. 1953, 45, 970–974. [Google Scholar] [CrossRef]
- Squires, P.H. Screw Extruder Pumping Efficiency. SPE J. 1958, 14, 24–30. [Google Scholar]
- Booy, M.L. Influence of Channel Curvature on Flow, Pressure Distribution, and Power Requirements of Screw Pumps and Melt Extruders. Polym. Eng. Sci. 1963, 3, 176–185. [Google Scholar] [CrossRef]
- Squires, P.H. Screw Extrusion–Flow Patterns and Recent Theoretical Developments. Polym. Eng. Sci. 1964, 4, 7–16. [Google Scholar] [CrossRef]
- Mallouk, R.S.; McKelvey, J.M. Power Requirements of Melt Extruder. Ind. Eng. Chem. 1953, 45, 987–989. [Google Scholar] [CrossRef]
- Maddock, B.H. Effect of Wear on the Delivery Capacity of Extruder Screw. SPE J. 1959, 15, 433–434. [Google Scholar]
- Syrjäla, S. On the Analysis of Fluid Flow and Heat Transfer in the Melt Conveying Section of a Single-Screw Extruder. Numer. Heat Transf. Part A Appl. 1999, 35, 25–47. [Google Scholar] [CrossRef]
- Syrjäla, S. Numerical Simulation of Nanisothermal Flow of Polymer Melt in a Single-Screw Extruder. Numer. Heat Transf. Part A Appl. 2000, 37, 897–915. [Google Scholar] [CrossRef]
- Ilinca, F.; Hétu, J.-F. Three-Dimensional Finite Element Solution of the Flow in Single and Twin-Screw Extruders. Int. Polym. Process. 2010, 25, 275–286. [Google Scholar] [CrossRef] [Green Version]
- Pachner, S.; Löw-Baselli, B.; Affenzeller, M.; Miethlinger, J. A Generalized 2D Output Model of Polymer Melt Flow in Single-Screw Extrusion. Int. Polym. Process. 2017, 32, 209–216. [Google Scholar] [CrossRef]
- Marschik, C.; Roland, W.; Löw-Baselli, B.; Miethlinger, J. A Heuristic Method for Modeling Three-Dimensional Non-Newtonian Flows of Polymer Melts in Single-Screw Extruders. J. Non-Newton. Fluid 2017, 248, 27–39. [Google Scholar] [CrossRef]
- Marschik, C.; Roland, W.; Miethlinger, J. A Network-Theory-Based Comparative Study of Melt-Conveying Models in Single-Screw Extrusion: A. Isothermal Flow. Polymers 2018, 10, 929. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Erdmenger, R. Mehrwellen-Schnecken in der Verfahrenstechnik. Chem. Ing. Tech. 1964, 36, 175–185. [Google Scholar] [CrossRef]
- Erdmenger, R. Schneckenmaschinen fur die Hochviskos-Verfahrenstechnik; Bayer AG: Leverkusen, Germany, 1978. [Google Scholar]
- Booy, M.L. Geometry of Fully Wiped Twin-Screw Equipment. Polym. Eng. Sci. 1978, 18, 973–984. [Google Scholar] [CrossRef]
- Booy, M.L. Isothermal Flow of Viscous Liquids in Corotating Twin Screw Devices. Polym. Eng. Sci. 1980, 20, 1220–1228. [Google Scholar] [CrossRef]
- Denson, C.D.; Hwang, B.K. The Influence of the Axial Pressure Gradient on Flow Rate for Newtonian Liquids in a Self Wiping, Co-Rotating Twin Screw Extruder. Polym. Eng. Sci. 1980, 20, 965–971. [Google Scholar] [CrossRef]
- Szydłowski, W.; White, J.L. An Improved Theory of Metering in an Intermeshing Corotating Twin-Screw Extruder. Adv. Polym. Technol. 1987, 7, 177–183. [Google Scholar] [CrossRef]
- White, J.L.; Szydłowski, W. Composite Models of Modular Intermeshing Corotating and Tangential Counter-Rotating Twin Screw Extruders. Adv. Polym. Technol. 1987, 7, 419–426. [Google Scholar] [CrossRef]
- Tayeb, J.; Vergnes, B.; Valle, G.D. Theoretical Computation of the Isothermal Flow Through the Reverse Screw Element of a Twin Screw Extrusion Cooker. J. Food Sci. 1988, 53, 616–625. [Google Scholar] [CrossRef]
- Tayeb, J.; Vergnes, B.; Della Valle, G. A Basic Model for a Twin-Screw Extruder. J. Food Sci. 1989, 54, 1047–1056. [Google Scholar] [CrossRef]
- Wang, Y.; White, J.L. Non-Newtonian Flow Modelling in the Screw Regions of an Intermeshing Corotating Twin Screw Extruder. J. Non-Newton. Fluid 1989, 32, 19–38. [Google Scholar] [CrossRef]
- Wang, Y.; White, J.L.; Szydłowski, W. Flow in a Modular Intermeshing Co-Rotating Twin Screw Extruder. Int. Polym. Process. 1989, 4, 262–269. [Google Scholar] [CrossRef]
- Chen, Z.; White, J.L. Dimensionless Non-Newtonian Isothermal Simulation and Scale-up Considerations for Modular Intermeshing Corotating Twin Screw Extruders. Int. Polym. Process. 1991, 6, 304–310. [Google Scholar] [CrossRef]
- White, J.L.; Chen, Z. Simulation of Non-Isothermal Flow in Modular Co-Rotating Twin Screw Extrusion. Polym. Eng. Sci. 1994, 34, 229–237. [Google Scholar] [CrossRef]
- Potente, H.; Ansalh, J.; Wittemeier, R. Throughput Characteristics of Tightly Intermeshing Co-rotating Twin Screw Extruders. Int. Polym. Process. 1990, 5, 208–216. [Google Scholar] [CrossRef]
- Malik, M.; Kalyon, D.M.; Golba, J.C., Jr. Simulation of Co-Rotating Twin Screw Extrusion Process Subject to Pressure-Dependent Wall Slip at Barrel and Screw Surfaces: 3D FEM Analysis for Combinations of Forward- and Reverse-Conveying Screw Elements. Int. Polym. Process. 2014, 29, 51–62. [Google Scholar] [CrossRef]
- Durin, A.; De Micheli, P.; Nguyen, H.-C.; David, C.; Valette, R.; Vergnes, B. Comparison between 1D and 3D Approaches for Twin-Screw Extrusion Simulation. Int. Polym. Process. 2014, 29, 641–648. [Google Scholar] [CrossRef]
- Avalosse, T.; Rubin, Y. Analysis of Mixing in Co-Rotating Twin Screw Extruders through Numerical Simulation. Int. Polym. Process. 2000, 15, 117–123. [Google Scholar] [CrossRef]
- Avalosse, T.; Rubin, Y.; Fondin, L. Non-Isothermal Modeling of Co-Rotating and Contra-Rotating Twin Screw Extruders. J. Reinf. Plast. Compos. 2002, 21, 419–429. [Google Scholar] [CrossRef]
- Stritzinger, U.; Roland, W.; Albrect, H.; Steinbichler, G. Modeling Fully Intermeshing Co-Rotating Twin-Screw Extruder Kneading Blocks: Part, A. Conveying Characteristics. SPE ANTEC Tech. Pap. 2021, 67. [Google Scholar]
- Roland, W.; Stritzinger, U.; Marschik, C.; Steinbichler, G. Modeling Fully Intermeshing Co-Rotating Twin-Screw Extruder Kneading Blocks: Part B. Power Consumption and Viscous Dissipation. SPE ANTEC Tech. Pap. 2021, 67. [Google Scholar]
- Kiesskalt, S. Untersuchungen an einer Kapsel Pumpe. VDI Zeitschr. 1927, 71, 453. [Google Scholar]
- Montelius, C.O.J. Der Kogelige Danske Videnscabernes Selscabs Skrifter. Teknist Tidskaift. 1933, 6, 61–63. [Google Scholar]
- Doboczky, Z. Einschnecke–Doppelschnecke. Plastverarbeiter 1965, 16, 57–67. [Google Scholar]
- Janssen, L.P.B.M.; Mulders, L.H.R.M.; Smith, J.M. A Model from the Output of the Pump Zone of the Double Screw Processor or Extruder. Plast. Polym. 1975, 43, 93–98. [Google Scholar]
- White, J.L.; Adewale, A. A Unified View of Modeling Flow in Counter-rotating Twin Screw Extruders. Int. Polym. Process. 1993, 8, 210–217. [Google Scholar] [CrossRef]
- Li, T.; Manas-Zloczower, I. Flow Field Analysis of an Intermeshing Counter-Rotating Twin Screw Extruder. Polym. Eng. Sci. 1994, 34, 551–558. [Google Scholar] [CrossRef]
- Kajiwara, T.; Nagashima, Y.; Nakano, Y.; Funatsu, K. Numerical Study of Twin-Screw Extruders by Three-Dimensional Flow Analysis-Development of Analysis Technique and Evaluation of Mixing Performance for Full Flight Screws. Polym. Eng. Sci. 1996, 36, 2142–2152. [Google Scholar] [CrossRef]
- Hong, M.-H.; White, J.L. Fluid Mechanics of Intermeshing Counter-Rotating Twin Screw Extruders. Int. Polym. Process. 1998, 13, 342–346. [Google Scholar] [CrossRef]
- Hong, M.H.; White, J.L. Simulation of Flow in an Intermeshing Modular Counter-Rotating Twin Screw Extruder: Non-Newtonian and Non-Isothermal Behavior. Int. Polym. Process. 1999, 14, 136–143. [Google Scholar] [CrossRef]
- Shah, A.; Gupta, M. Comparison of the Flow in Co-rotating and Counter-Rotating Twin Screw Extruders. SPE ANTEC Tech. Pap. 2004, 50, 443–447. [Google Scholar]
- Gupta, M. Non-Isothermal Simulation of the Flow in Co-rotating and Counter-Rotating Twin Screw Extruders Using Mesh Partition Technique. SPE ANTEC Tech. Pap. 2008, 54, 316–320. [Google Scholar]
- Wilczyński, K.; Lewandowski, A. Study on the Polymer Melt Flow in a Closely Intermeshing Counter-Rotating Twin Screw Extruder. Int. Polym. Process. 2014, 29, 649–659. [Google Scholar] [CrossRef]
- Wilczyński, K.J.; Nastaj, A.; Lewandowski, A.; Wilczyński, K. A Composite Model for Starve Fed Single Screw Extrusion of Thermoplastics. Polym. Eng. Sci. 2014, 54, 2362–2374. [Google Scholar] [CrossRef]
- Wilczyński, K.J.; Lewandowski, A.; Nastaj, A.; Wilczyński, K. Modeling for Starve Fed/Flood Fed Mixing Single-Screw Extruders. Int. Polym. Process. 2016, 31, 82–91. [Google Scholar] [CrossRef]
- Wilczyński, K.J.; Lewandowski, A.; Nastaj, A.; Wilczyński, K. A Global Model for Starve-Fed Nonconventional Single-Screw Extrusion of Thermoplastics. Adv. Polym. Technol. 2017, 36, 23–35. [Google Scholar] [CrossRef]
- Available online: www.ansys.com/products/fluids/ansys-polyflow (accessed on 1 December 2021).
- Ariffin, A.; Ahmad, M.S.B. Review: Single Screw Extruder in Particulate Filler Composite. Polym. Plast. Technol. 2011, 50, 395–403. [Google Scholar] [CrossRef]
- Wilczyński, K.; Nastaj, A.; Lewandowski, A.; Wilczyński, K.J. Multipurpose Computer Model for Screw Processing of Plastics. Polym. Plast. Technol. 2012, 51, 626–633. [Google Scholar] [CrossRef]
- Teixeira, C.; Gaspar-Cunha, A.; Covas, J.A. Flow and Heat Transfer Along the Length of a Co-rotating Twin Screw Extruder. Polym. Plast. Technol. 2012, 51, 1567–1577. [Google Scholar] [CrossRef]
- Hyvärinen, M.; Jabeen, R.; Kärki, T. The Modeling of Extrusion Processes for Polymers—A Review. Polymers 2020, 12, 1306. [Google Scholar] [CrossRef]
- Vergnes, B. Average Shear Rates in the Screw Elements of a Corotating Twin-Screw Extruder. Polymers 2021, 13, 304. [Google Scholar] [CrossRef] [PubMed]
- Demirci, A.; Teke, I.; Polychronopoulos, N.D.; Vlachopoulos, J. The Role of Calender Gap in Barrel and Screw Wear in Counterrotating Twin Screw Extruders. Polymers 2021, 13, 990. [Google Scholar] [CrossRef] [PubMed]
- Bauera, H.; Matić, J.; Khinastab, J. Characteristic parameters and process maps for fully-filled twin-screw extruder elements. Chem. Eng. Sci. 2021, 230, 116202. [Google Scholar] [CrossRef]
- Dhaval, M.; Sharma, S.; Dudhat, K.; Chavda, J. Twin-Screw Extruder in Pharmaceutical Industry: History, Working Principle, Applications, and Marketed Products: An In-depth Review. J. Pharm. Innov. 2020, 1–25. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H. A Review on the Screw Configuration of Intermeshing Co-Rotating Twin Screw Extruder. Korean Chem. Eng. Res. 2021, 59, 305–315. [Google Scholar] [CrossRef]
- Ravikumar, P.S.; Arumugam, S.K.; Gangradey, R.; Mukherjee, S.; Srinivasan, K.; Sadasivan, S.; Gupta, V.; Aggarwal, M.C. Development of Cryogenic Extrusion Techniques and Modelling of a Twin Screw Extruder: A Review. J. Fusion Energy 2021, 40, 1–18. [Google Scholar] [CrossRef]
- Klein, I.; Klein, R.J. The SPR System of CAE Software. In Computer Modeling for Extrusion and Other Continuous Polymer Processes; O’Brien, K.T., Ed.; Hanser Publishers: New York, NY, USA, 1992; Chapter 5; pp. 103–252. ISBN 978-1569900680. [Google Scholar]
- Agur, E.E.; Vlachopoulos, J. Numerical Simulation of a Single-Screw Plasticating Extruder. Polym. Eng. Sci. 1982, 22, 1084–1094. [Google Scholar] [CrossRef]
- Vincelette, A.R.; Guerrero, C.S.; Carreau, P.J.; Lafleur, P.G. A Model for Single-Screw Plasticating Extruders. Int. Polym. Process. 1989, 4, 232–241. [Google Scholar] [CrossRef]
- Potente, H.; Hanhart, W.; Schöppner, V. Potential Applications for Computer-Aided Extruder Design. Int. Polym. Process. 1993, 8, 335–344. [Google Scholar] [CrossRef]
- Potente, H.; Hanhart, W.; Reski, T. Design and Processing Optimization of Extruder Screws. Polym. Eng. Sci. 1994, 34, 937–945. [Google Scholar] [CrossRef]
- Sebastian, D.H.; Rakos, R. Extrusion Process Analysis with PASS. In Computer Modeling for Extrusion and Other Continuous Polymer Processes; O’Brien, K.T., Ed.; Hanser Publishers: New York, NY, USA, 1992; Chapter 7; pp. 331–448. ISBN 978-1569900680. [Google Scholar]
- Amellal, K.; Lafleur, P.G. Computer Simulation of Conventional and Barrier Screw Extruders. Plast. Rubber Compos. Process. Appl. 1993, 19, 227–239. [Google Scholar]
- Wilczyński, K. A Computer Model for Single-Screw Plasticating Extrusion. Polym. Plast. Technol. 1996, 35, 449–477. [Google Scholar] [CrossRef]
- Wilczyński, K. Single Screw Extrusion Model for Plasticating Extruders. Polym. Plast. Technol. 1999, 38, 581–608. [Google Scholar] [CrossRef]
- Wilczyński, K.; Buziak, K.; Wilczyński, K.J.; Lewandowski, A.; Nastaj, A. Computer Modeling for Single-Screw Extrusion of Wood-Plastic Composites. Polymers 2018, 10, 295. [Google Scholar] [CrossRef] [Green Version]
- Bawiskar, S.; White, J.L. A Composite Model for Solid Conveying, Melting, Pressure and Fill Factor Profiles in Modular Co-Rotating Twin Screw Extruders. Int. Polym. Process. 1997, 12, 331–340. [Google Scholar] [CrossRef]
- White, J.L.; Kim, B.-J.; Bawiskar, S.; Keum, J.M. Development of a Global Computer Software for Modular Self-Wiping Corotating Twin Screw Extruders. Polym. Plast. Technol. 2001, 40, 385–405. [Google Scholar] [CrossRef]
- White, J.L.; Keum, J.; Jung, H.; Ban, K.; Bumm, S. Corotating Twin-Screw Extrusion Reactive Extrusion-Devolatilization Model and Software. Polym. Plast. Technol. 2006, 45, 539–548. [Google Scholar] [CrossRef]
- Potente, H.; Ansalh, J.; Klarholz, B. Design of Tightly Intermeshing Co-Rotating Twin Screw Extruders. Int. Polym. Process. 1994, 9, 11–25. [Google Scholar] [CrossRef]
- Potente, H.; Bastian, M.; Flecke, J. Design of a Compounding Extruder by Means of the SIGMA Simulation Software. Adv. Polym. Technol. 1999, 18, 147–170. [Google Scholar] [CrossRef]
- Vergnes, B.; Valle, G.D.; Delamare, L. A Global Computer Software for Polymer Flows in Corotating Twin Screw Extruders. Polym. Eng. Sci. 1998, 38, 1781–1792. [Google Scholar] [CrossRef]
- Canedo, E.L. Computer Simulation of Plastics Compounding Operations in Twin-Screw Extruders. SPE ANTEC Tech. Pap. 1999, 45, 310–316. [Google Scholar]
- Wilczyński, K.; Jiang, Q.; White, J.L. A Composite Model for Melting, Pressure and Fill Factor Profiles in a Metered Fed Closely Intermeshing Counter-Rotating Twin Screw Extruder. Int. Polym. Process. 2007, 22, 198–203. [Google Scholar] [CrossRef]
- Jiang, Q.; White, J.L.; Yang, J. A Global Model for Closely Intermeshing Counter-Rotating Twin Screw Extruders with Flood Feeding. Int. Polym. Process. 2010, 25, 223–235. [Google Scholar] [CrossRef]
- Wilczyński, K.; Nastaj, A.; Lewandowski, A.; Wilczyński, K.J. Modeling of the Polymer Melt Flow in a Twin Screw Counter-Rotating Extrusion Process. Part II. Simulation and Experimental Studies—Verification of the Adopted Model. Polimery 2011, 56, 45–50. [Google Scholar] [CrossRef]
- Lewandowski, A.; Wilczyński, K.J.; Nastaj, A.; Wilczyński, K. A Composite Model for an Intermeshing Counter-Rotating Twin-Screw Extruder and its Experimental Verification. Polym. Eng. Sci. 2015, 55, 2838–2848. [Google Scholar] [CrossRef]
- Available online: www.scconsultants.com/en/ludovic (accessed on 1 December 2021).
- Available online: www.ktp.uni-paderborn.de/sigma (accessed on 1 December 2021).
- Mooney, M. Explicit Formulas for Slip and Fluidity. J. Rheol. 1931, 2, 210–222. [Google Scholar] [CrossRef]
- Potente, H.; Bornemann, M.; Kurte-Jardin, M. Analytical Model for the Throughput and Drive Power Calculation in the Melting Section of Single Screw Plasticizing Units Considering Wall-Slippage. Int. Polym. Process. 2009, 24, 23–30. [Google Scholar] [CrossRef]
- Lewandowski, A.; Wilczyński, K. Global Modeling of Single Screw Extrusion with Slip Effects. Int. Polym. Process. 2019, 34, 81–90. [Google Scholar] [CrossRef]
- Kalyon, D.M.; Lawal, A.; Yazici, R.; Yaras, P.; Railkar, S. Mathematical Modeling and Experimental Studies of Twin-Screw Extrusion of Filled Polymers. Polym. Eng. Sci. 1999, 39, 1139–1151. [Google Scholar] [CrossRef]
- Bingham, E.C. Fluidity and Plasticity; McGraw-Hill: New York, NY, USA, 1922. [Google Scholar]
- Bird, R.B.; Dai, G.C.; Yarusso, B.J. The Rheology and Flow of Viscoplastic Materials. Rev. Chem. Eng. 1983, 1, 1–70. [Google Scholar] [CrossRef]
- Mitsoulis, E. Flows of Viscoplastic Materials: Models and Computations. In Rheology Reviews 2007; Binding, D.M., Hudson, N.E., Keunings, R., Eds.; The British Society of Rheology: London, UK, 2007; pp. 135–178. [Google Scholar]
- Lawal, A.; Kalyon, D.M.; Yilmazer, U. Extrusion and Lubrication Flows of Viscoplastic Fluids with Wall Slip. Chem. Eng. Commun. 1993, 122, 127–150. [Google Scholar] [CrossRef]
- Lawal, A.; Kalyon, D.M. Single Screw Extrusion of Viscoplastic Fluids Subject to Different Slip Coefficients at Screw and Barrel Surfaces. Polym. Eng. Sci. 1994, 34, 1471–1479. [Google Scholar] [CrossRef]
- Lewandowski, A.; Wilczyński, K. Global Modeling for Single Screw Extrusion of Viscoplastics. Int. Polym. Process. 2020, 35, 26–36. [Google Scholar] [CrossRef]
- Wilczyński, K.; Nastaj, A.; Wilczyński, K.J. Melting Model for Starve Fed Single Screw Extrusion of Thermoplastics. Int. Polym. Process. 2013, 28, 34–42. [Google Scholar] [CrossRef]
- Wilczyński, K.J.; Nastaj, A.; Wilczyński, K. A Computer Model for Starve-Fed Single-Screw Extrusion of Polymer Blends. Adv. Polym. Technol. 2018, 37, 2142–2151. [Google Scholar] [CrossRef]
- Wilczyński, K.J.; Buziak, K. A Computer Model of Starve Fed Single Screw Extrusion of Wood Plastic Composites. Polymers 2021, 13, 1252. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley Longman Publishing, Co.: Boston, MA, USA, 1989; ISBN 978-0-201-15767-3. [Google Scholar]
- Gaspar-Cunha, A. Modeling and Optimization of Single Screw Extrusion. Ph.D. Thesis, University of Minho, Guimarães, Portugal, 2000. [Google Scholar]
- Covas, J.A.; Cunha, A.G.; Oliveira, P. An Optimization Approach to Practical Problems in Plasticating Single Screw Extrusion. Polym. Eng. Sci. 1999, 39, 443–456. [Google Scholar] [CrossRef]
- Covas, J.A.; Gaspar-Cunha, A. The Use of an Optimization Approach to the Design of Extrusion Screw. In Proceedings of the Polymer Processing Society 16th Annual Meeting (PPS-16), Shanghai, China, 18–23 June 2000. [Google Scholar]
- Gaspar-Cunha, A.; Covas, J.A. The Design of Extrusion Screw: An Optimization Approach. Int. Polym. Process. 2001, 16, 229–240. [Google Scholar] [CrossRef] [Green Version]
- Gaspar-Cunha, A.; Covas, J.A.; Vergnes, B. An Optimization Methodology for Setting the Operating Conditions in Twin-Screw Extrusion. In Proceedings of the Polymer Processing Society 18th Annual Meeting (PPS-18), Guimaraes, Portugal, 18–21 June 2002. [Google Scholar]
- Gaspar-Cunha, A.; Poulesquen, A.; Vergnes, B.; Covas, J.A. Optimization of Processing Conditions for Polymer Twin-Screw Extrusion. Int. Polym. Process. 2002, 17, 201–213. [Google Scholar] [CrossRef]
- Gaspar-Cunha, A.; Covas, J.; Vergnes, B. Defining the Configuration of Co-Rotating Twin-Screw Extruders with Multiobjective Evolutionary Algorithms. Polym. Eng. Sci. 2005, 45, 1159–1173. [Google Scholar] [CrossRef]
- Teixeira, C.; Covas, J.A.; Berzin, F.; Vergnes, B.; Gaspar-Cunha, A. Application of Evolutionary Algorithms to the Definition of the Optimal Twin-Screw Extruder Configuration for Starch Cationization. Polym. Eng. Sci. 2011, 51, 330–340. [Google Scholar] [CrossRef]
- Covas, J.A.; Gaspar-Cunha, A. Polymer Extrusion—Setting the Operating Conditions and Defining the Screw Geometry. In Optimization in Polymer Processing; Gaspar-Cunha, A., Covas, J.A., Eds.; Nova Science Publishers Inc.: Hauppauge, NY, USA, 2011; Chapter 5; pp. 1–35. ISBN 978-1-61122-818-2. [Google Scholar]
- Covas, J.A.; Gaspar-Cunha, A. Extrusion Scale-up: An Optimization-based Methodology. Int. Polym. Process. 2009, 24, 67–82. [Google Scholar] [CrossRef]
- Covas, J.A.; Gaspar-Cunha, A. A Scaling-up Methodology for Co-rotating Twin-Extruders. In Proceedings of the 27th Annual Meeting of the Polymer Processing Society (PPS-27), Marrakesh, Morocco, 10–14 May 2011; pp. 1–6. [Google Scholar]
- Gaspar-Cunha, A.; Covas, J.A. An Engineering Scale-Up Approach Using Multi-Objective Optimization. Int. J. Nat. Comp. Res. 2014, 4, 17–30. [Google Scholar] [CrossRef] [Green Version]
- Nastaj, A.; Wilczyński, K. Optimization and Scale-Up for Polymer Extrusion. Polymers 2021, 13, 1547. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewandowski, A.; Wilczyński, K. Modeling of Twin Screw Extrusion of Polymeric Materials. Polymers 2022, 14, 274. https://doi.org/10.3390/polym14020274
Lewandowski A, Wilczyński K. Modeling of Twin Screw Extrusion of Polymeric Materials. Polymers. 2022; 14(2):274. https://doi.org/10.3390/polym14020274
Chicago/Turabian StyleLewandowski, Adrian, and Krzysztof Wilczyński. 2022. "Modeling of Twin Screw Extrusion of Polymeric Materials" Polymers 14, no. 2: 274. https://doi.org/10.3390/polym14020274
APA StyleLewandowski, A., & Wilczyński, K. (2022). Modeling of Twin Screw Extrusion of Polymeric Materials. Polymers, 14(2), 274. https://doi.org/10.3390/polym14020274