Polymer-Based MEMS Electromagnetic Actuator for Biomedical Application: A Review

 ,
,  ,
, 
Abstract
1. Introduction
2. MEMS Actuators
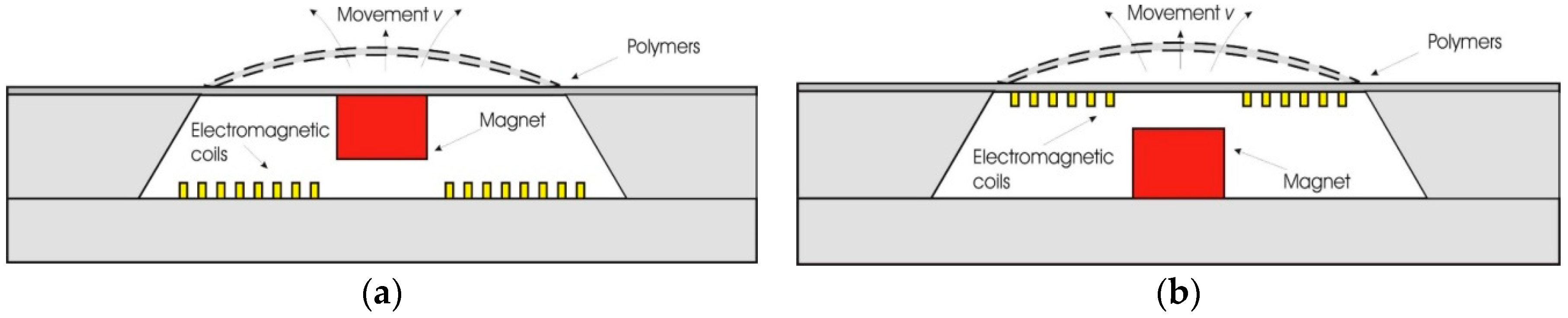
Electromagnetic Actuators Principle
3. MEMS Fabrication of Polymer-Based Actuator
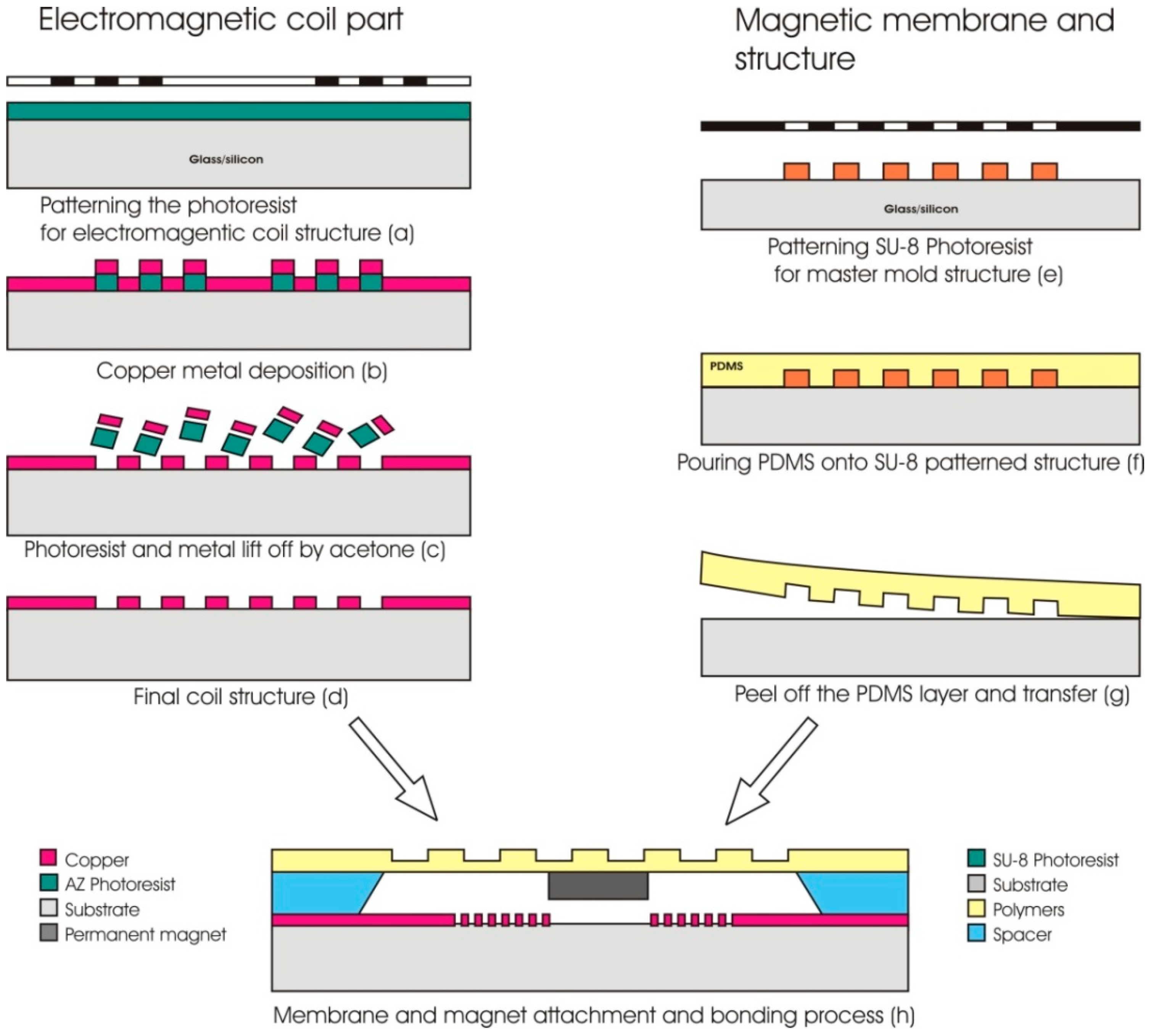
3.1. Fabrication of EM Actuator
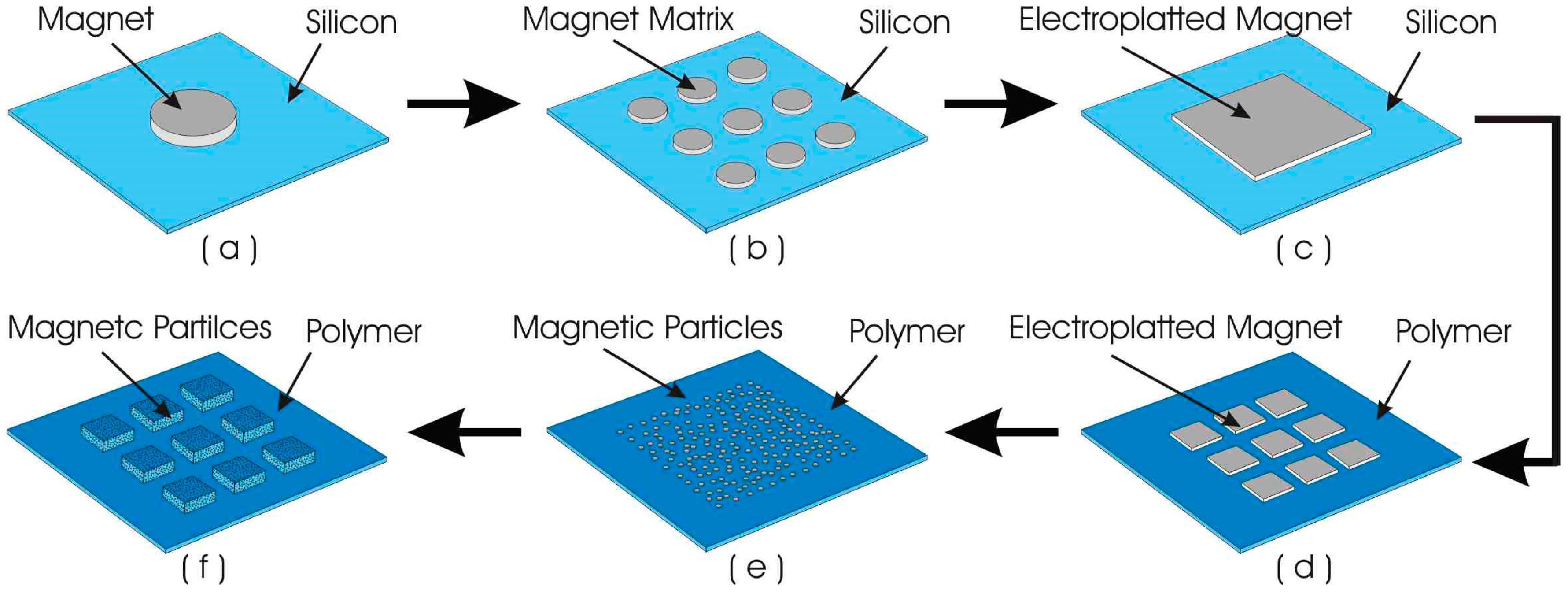
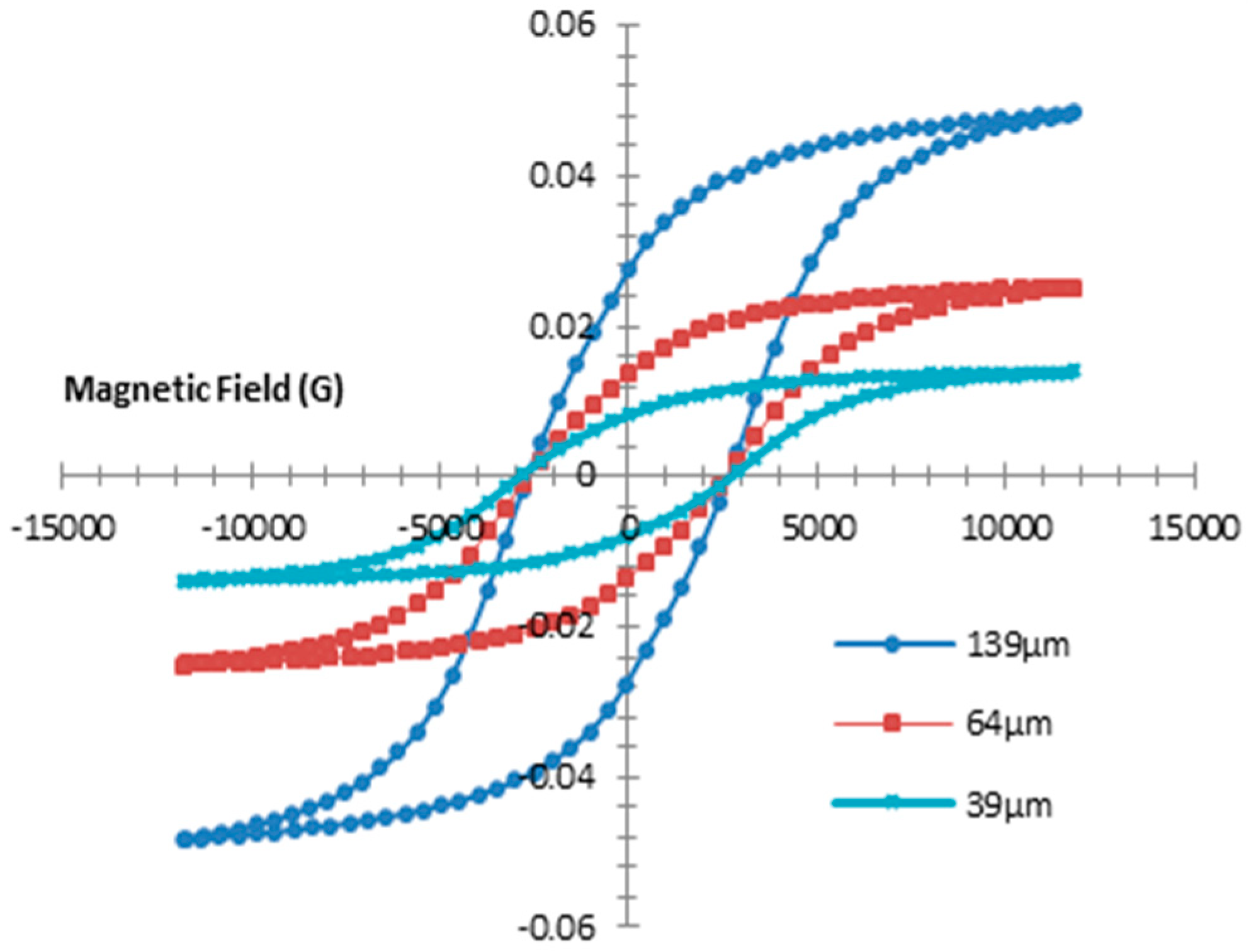
3.2. Fabrication of Magnetic Polymer Composites Membrane
4. Application of Polymers for Electromagnetic Actuators
4.1. Magnetic Polymer Composite-Based Microactuators
4.2. Polymer-Based Electromagnetic Actuators for Micropumps and Microvalves
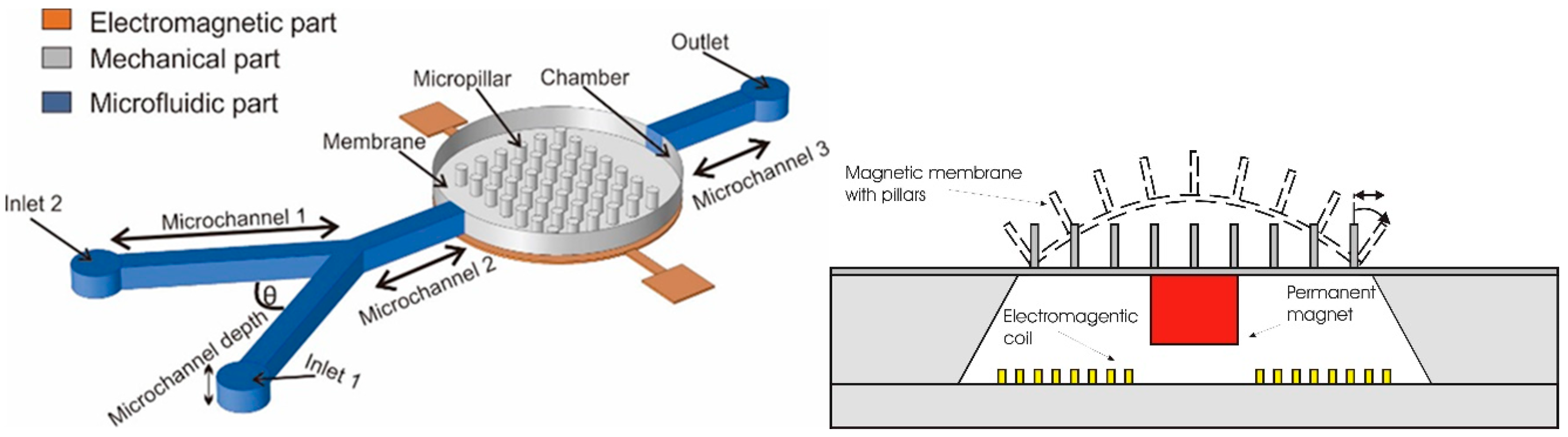
4.3. Polymer-Based Active Micromixer
5. Conclusions and Future Aspects of Polymers for EM Actuator
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fallahi, H.; Zhang, J.; Phan, H.P.; Nguyen, N.T. Flexible Microfluidics: Fundamentals, Recent Developments, and Applications. Micromachines 2019, 10, 830. [Google Scholar] [CrossRef]
- Barth, C.; Knospe, C. Actuation of Flexible Membranes via Capillary Force: Single-Active-Surface Experiments. Micromachines 2018, 9, 545. [Google Scholar] [CrossRef]
- Cordill, M.J.; Glushko, O.; Putz, B. Electro-Mechanical Testing of Conductive Materials Used in Flexible Electronics. Front. Mater. 2016, 3. [Google Scholar] [CrossRef]
- Susheel, K.; Sarita, K.; Amit, K.; Yuvaraj, H.; Bandna, K.; Rajesh, K. Magnetic polymer nanocomposites for environmental and biomedical applications. Colloid Polym. Sci. 2014, 292, 2025–2052. [Google Scholar]
- Imai, S.; Tsukioka, T. A magnetic MEMS actuator using a permanent magnet and magnetic fluid enclosed in a cavity sandwiched by polymer diaphragms. Precis. Eng. 2014, 38, 548–554. [Google Scholar] [CrossRef]
- Safonovs, R. Design and Modelling of Electromagnetic Actuation in MEMS Switches, 2017. Master’s Thesis, The University of Southern Denmark, Odense, Denmark, 2017. [Google Scholar]
- Ashraf, M.W.; Tayyaba, S.; Afzulpurkar, N. Micro Electromechanical Systems (MEMS) Based Microfluidic Devices for Biomedical Applications. Int. J. Mol. Sci. 2011, 12, 3648–3704. [Google Scholar] [CrossRef]
- Hilber, W. Stimulus-active polymer actuators for next-generation microfluidic devices. Appl. Phys. A 2016, 122, 751. [Google Scholar] [CrossRef]
- Said, M.M.; Yunas, J.; Pawinanto, R.E.; Majlis, B.Y. PDMS based electromagnetic actuator membrane with embedded magnetic particles in polymer composite. Sens. Actuators A 2016, 245, 85–96. [Google Scholar] [CrossRef]
- Hamid, N.A.; Ibrahim, M.; Radzi, S.A.; Chiew, W.Y.; Yunas, J.; Majlis, B.Y. A stack bonded thermo-pneumatic micro-pump utilizing polyimide based actuator membrane for biomedical applications. Microsyst. Technol. 2017, 23, 4037–4043. [Google Scholar] [CrossRef]
- Liewellyn-Evans, H.; Griffiths, C.A.; Fahmy, A. Microgripper design and evaluation for automated l-wire assembly: A survey. Microsyst. Technol. 2020. [Google Scholar] [CrossRef]
- Singh, G.; Shahin, S.; Juliet, A.V. Efficient Low Frequency, Low Power Electromagnetically Actuated Acoustic Microspeaker for Hearing Aid Applications. IOSR J. Electron. Commun. Eng. (IOSR-JECE) 2015, 15–20. [Google Scholar]
- Brian, K.; Meng, E. Review of polymer MEMS micromachining. J. Micromech. Microeng. 2016, 26, 013001. [Google Scholar] [CrossRef]
- Yamahata, C.; Chastellain, M.; Parashar, V.K.; Petri, A.; Hofmann, H.; Gijs, M.A.M. Plastic micropump with ferrofluidic actuation. J. Microelectromech. Syst. 2005, 14. [Google Scholar] [CrossRef]
- Do, T.N.; Phan, H.; Nguyen, T.Q.; Visell, Y. Miniature Soft Electromagnetic Actuators for Robotic Applications. Adv. Funct. Mater. 2018, 28. [Google Scholar] [CrossRef]
- Brauer, J.R. Magnetic Actuators and Sensors; IEEE Magnetic Society; John Willey & Sons Inc.: Hoboken, NJ, USA, 2006. [Google Scholar] [CrossRef]
- Mi, S.; Pu, H.; Xia, S.; Sun, W. A Minimized Valveless Electromagnetic Micropump for Microfluidic Actuation on Organ Chips. Sens. Actuators A Phys. 2020, 301, 111704. [Google Scholar] [CrossRef]
- Hamid, N.A.; Yunas, J.; Bahadorimehr, A.R.; Majlis, B.Y. Design Consideration of Membrane Structure for Thermal Actuated Micropump. Adv. Mater. Res. 2011, 254, 42–45. [Google Scholar] [CrossRef]
- Zhou, Y. Thesis Doctor of Philosophy in Mechanical Engineering; The University of Illinois: Chicago, IL, USA, 2010. [Google Scholar]
- Yaakub, T.N.T.; Yunas, J.; Latif, R.; Hamzah, A.A.; RazipWee, M.F.M.; Majlis, B.Y. Surface Modification of Electroosmotic Silicon Microchannel Using Thermal Dry Oxidation. Micromachines 2018, 9, 222. [Google Scholar] [CrossRef]
- Bahadorimehr, A.R.; Jumril Yunas, J.; Majlis, B.Y. Low cost fabrication of microfluidic microchannels for Lab-On-a-Chip applications. In Proceedings of the IEEE Conference 2010 International Conference on Electronic Devices, Systems and Applications, Kuala Lumpur, Malaysia, 11–14 April 2010. [Google Scholar]
- Feng, H.; Miao, X.; Yang, Z. Design, Simulation and Experimental Study of the Linear Magnetic Microactuator. Micromachines 2018, 9, 454. [Google Scholar] [CrossRef]
- Venstra, W.J.; Sarro, P.M. Fabrication of crystalline membranes oriented in the (111) plane in a (100) silicon wafer. Microelectron. Eng. 2003, 68, 502–507. [Google Scholar] [CrossRef]
- Tanaka, Y. Electric actuating valves incorporated into an all glass-based microchip exploiting the flexibility of ultra thin glass. RSC Adv. 2013, 3, 10213–10220. [Google Scholar] [CrossRef]
- Korlyakov, A.V.; Mikhailova, O.N.; Serkov, A.V. Metallic coatings for MEMS structures. IOP Conf. Ser. Mater. Sci. Eng. 2018, 387, 012040. [Google Scholar] [CrossRef]
- Chen, Y.C.; Kohl, P.A. Photosensitive sacrificial polymer with low residue. Microelectron. Eng. 2011, 88, 3087–3093. [Google Scholar] [CrossRef]
- Abel, L.T.; Rodney, S.R.; Melody, A.S.; Matthew, R.G. An ultra-thin PDMS membrane as a bio/micro–nano interface: Fabrication and characterization. Biomed. Microdevices 2007, 9, 587–595. [Google Scholar]
- Suter, M.; Ergeneman, O.; Schmid, S.; Camenzind, A.; Nelson, B.J.; Hierold, C. Supermagnetic Photosensitive Polymer Nanocomposite for Microactuators. In Proceedings of the TRANSDUCERS 2009—2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009. [Google Scholar]
- Alvankarian, J.; Bahadorimehr, A.; Majlis, B.Y. A pillar-based microfilter for isolation of white blood cells on elastomeric substrate. Biomicrofluidics 2013, 7, 014102. [Google Scholar] [CrossRef] [PubMed]
- Yue, F.G.; Zhao, Y. Microstructured Actuation of Liquid Crystal Polymer Networks. Adv. Funct. Mater. 2020, 30, 1901890. [Google Scholar] [CrossRef]
- Zhang, R.Q.; Hong, S.L.; Wen, C.Y.; Pang, D.Y.; Zhang, Z.I. Rapid detection and subtyping of multiple influenza viruses on a microfluidic chip integrated with controllable micro-magnetic field. Biosens. Bioelectron. 2018, 100, 348–354. [Google Scholar] [CrossRef]
- Masrie, M.; Yunas, J.; Majlis, B.Y.; Dehzangi, A. Vertically integrated optical transducer for bio-particle detection. J. Eng. Sci. Technol. 2017, 12, 1886–1899. [Google Scholar]
- Bar-Cohen, Y.; Anderson, I.A. Electroactive polymer (EAP) actuators—Background review. Mech. Soft Mater. 2019, 1, 5. [Google Scholar] [CrossRef]
- Gao, N.; Hou, G.; Liu, J.; Shen, J.; Gao, Y.; Zhang, L. Tailoring the mechanical properties of polymer nanocomposites via interfacial engineering. Phys. Chem. Chem. Phys. 2019, 21, 18714–18726. [Google Scholar]
- Praveen, K.M.; Pious, C.V.; Thomas, S.; Grohens, Y. Non-Thermal Plasma Technology for Polymeric Materials, Applications in Composites, Nanostructured Mateiasl and Biomedical Fields; 2019; pp. 1–21. [Google Scholar] [CrossRef]
- Grujic, A.; Talijan, N.; Stojanovic, D.; Stajić-Trosic, J.; Burzic, Z.; Balanovic, L.; Aleksic, R. Mechanical and magnetic properties of composite materials with polymer matrix. J. Min. Metall. Sect. B Metall. 2010, 46, 25–32. [Google Scholar] [CrossRef]
- Rekosova, J.; Dosoudil, R.; Usakova, M.; Usak, E.; Hudec, I. Magnetopolymer Composites with Soft Magnetic Ferrite Filler. IEEE Trans. Magn. 2013, 49, 38–41. [Google Scholar] [CrossRef]
- Madou, M.J. Fundamentals of Microfabrication: The Science of Miniaturization, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Masrie, M.; Majlis, B.Y.; Yunas, J. Fabrication of multilayer-PDMS based microfluidic device for bio-particles concentration detection. Bio-Med Mater. Eng. 2014, 24, 1951–1958. [Google Scholar] [CrossRef]
- Tsao, C.W. Polymer Microfluidics: Simple, Low-Cost Fabrication Process Bridging Academic Lab Research to Commercialized Production. Micromachines 2016, 7, 225. [Google Scholar] [CrossRef] [PubMed]
- Suter, M.; Li, Y.; Sotiriou, G.A.; Teleki, A.; Pratsinis, S.E.; Hierold, C. low-cost fabrication of pmma and pmma based magnetic composite cantilevers. In Proceedings of the 16th International Solid-State Sensors, Actuators and Microsystems Conference 2011, Beijing, China, 5–9 June 2010. [Google Scholar] [CrossRef]
- Kilani, M.I.; Galambos, P.C.; Haik, Y.S.; Chen, C.J. Design and analysis of a surface micromachined spiral-channel viscous pump. J. Fluids Eng. 2003, 125, 339–344. [Google Scholar] [CrossRef]
- Sim, W.; Oh, J.; Choi, B. Fabrication, experiment of a microactuator using magnetic fluid for micropump application. Microsyst. Technol. 2006, 12, 1085–1091. [Google Scholar] [CrossRef]
- Sylgard® 184 Silicone Elastomer Datasheet. Available online: www.dowcorning.com (accessed on 24 December 2019).
- Hamid, N.A.; Yunas, J.; Majlis, B.Y.; Hamzah, A.A.; Bais, B. Microfabrication of Si3N4-polyimide membrane for thermo-pneumatic actuator. Microelectron. Int. 2015, 32, 18–24. [Google Scholar] [CrossRef]
- Shearwood, C.; Harradine, M.A.; Birch, T.S.; Stevens, J.C. Applications of polyimide membrane to MEMS technology. Microelectron. Eng. 1996, 30, 547–550. [Google Scholar] [CrossRef]
- DUPONT(TM)KAPTON®, Datasheet. Available online: https://www.dupont.com/content/dam/dupont/products-and-services/membranes-and-films/polyimde-films/documents/DEC-Kapton-summary-of-properties.pdf (accessed on 24 December 2019).
- Kim, K.H.; Yoon, H.J.; Jeong, O.C.; Yang, S.S. Fabrication and test of a micro electromagnetic actuator. Sens. Actuators A Phys. 2005, 117, 8–16. [Google Scholar] [CrossRef]
- Zhou, Y. Design and Microfabrication of an Elctromagentically Actuated Soft Polymer Micropump. Master’s Thesis, Beijing University of Technology, Beijing, China, 2006. [Google Scholar]
- Nguyen, N.T.; Truong, T.Q. A fully polymeric micropump with piezoelectric actuators. Sens. Actuators B Chem. 2004, 97, 137–143. [Google Scholar] [CrossRef]
- Cho, J.; Anderson, M.; Richards, R.; Bahr, D.; Richards, C. Optimization of electromechanical coupling for a thin-film PZT membrane: II. Experiment. J. Micromech. Microeng. 2005, 15, 1804–1809. [Google Scholar] [CrossRef]
- Sun, Y.; Piyabongkarn, D.; Sezen, A.; Nelson, B.J.; Rajamani, R. A high-aspect-ratio two-axis electrostatic microactuator with extended travel range. Sens. Actuators A Phys. 2002, 102, 49–60. [Google Scholar] [CrossRef]
- Francais, O.; Dufour, I. Enhancement of elementary displaced volume with electrostatically actuated diaphragms: Application to electrostatic micropumps. J. Micromech. Microeng. 2000, 10, 282–286. [Google Scholar] [CrossRef]
- Pu, C.; Park, S.; Chu, P.B.; Lee, S.S.; Tsai, M.; Peale, D.; Bonadeo, N.H.; Brener, I. Electrostatic actuation of three-dimensional MEMS mirrors using sidewall electrodes. IEEE J. Sel. Top. Quantum Electron. 2004, 10, 472–477. [Google Scholar] [CrossRef]
- Conrad, H.; Schenk, H.; Kaiser, B.; Langa, S.; Gaudet, M.; Enz, M. A small-gap electrostatic micro-actuator for large deflections. Nat. Commun. 2015, 6, 10078. [Google Scholar] [CrossRef]
- Ni, J.H.; Li, B.Z.; Yang, J.G. A MEMS-Based PDMS Micropump Utilizing Electromagnetic Actuation and Planar In-Contact Check Valves. Adv. Mater. Res. 2010, 139–141, 1574–1577. [Google Scholar] [CrossRef]
- Xia, F.; Xu, T.; Tadigadapa, S.; Zhang, Q.M. Electroactive polymers for microactuators and microfluidic devices. In Proceedings of the 7th International Conference on Miniaturized Chemical and Biochemical Analysis Systems, Squaw Valley, CA, USA, 5–9 October 2003; pp. 195–198. [Google Scholar]
- Cooney, C.G.; Towe, B.C. A thermopneumatic dispensing micropump. Sens. Actuator A Phys. 2004, 116, 519–524. [Google Scholar] [CrossRef]
- Amirouche, F.; Zhou, Y.; Johnson, T. Current micropump technologies and their biomedical applications. Microsyst. Technol. 2009, 145, 647–666. [Google Scholar] [CrossRef]
- Yamahata, C.; Lotto, C.; Al, E.; Gijs, M.A.M. A PMMA valveless micropump using electromagnetic actuation. Microfluid. Nanofluidics 2005, 2, 197–207. [Google Scholar] [CrossRef]
- Büttgenbach, S. Electromagnetic Micromotors-Design, Fabrication and Applications. Micromachines 2014, 5, 929–942. [Google Scholar] [CrossRef]
- Lee, S.A.; Lee, H.; Pinney, J.R.; Khialeeva, E.; Bergsneider, M.; Judy, J.W. Development of Microfabricated Magnetic Actuators for Removing Cellular Occlusion. J. Micromech. Microeng. 2011, 21, 054006. [Google Scholar] [CrossRef]
- Zhou, Y.; Amirouche, F. An electromagnetically-actuated all-PDMS valveless. Micromachines 2011, 11, 345–355. [Google Scholar] [CrossRef]
- Nouri, D.; Zabihi-Hesari, A.; Passandideh-Fard, M. Rapid mixing in micromixers using magnetic field. Sens. Actuators A Phys. 2017, 255, 79–86. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, J.; Alici, G.; Yan, S.; Mutlu, R.; Li, W.; Yan, T. An inverted micro-mixer based on a magnetically-actuated cilium made of Fe doped PDMS. Smart Mater. Struct. 2016, 25, 95049. [Google Scholar] [CrossRef]
- Banis, G.; Tyrovolas, K.; Angelopoulos, S.; Ferraro, A.; Hristoforou, E. Pushing of Magnetic Microdroplet Using Electromagnetic Actuation System. Nanomaterials 2020, 10, 371. [Google Scholar] [CrossRef] [PubMed]
- Rinklin, P.; Krause, H.J.; Wolfrum, B. On-chip electromagnetic tweezers—3-dimensional particle actuation using microwire crossbar arrays. Lab Chip 2016, 24, 4749–4758. [Google Scholar] [CrossRef]
- Chen, L.; Offenhäusser, A.; Rause, H.J. Magnetic tweezers with high permeability electromagnets for fast actuation of magnetic beads. Rev. Sci. Instrum. 2015, 86, 044701. [Google Scholar] [CrossRef]
- Choi, J.W.; Hahn, C.A.; Bhansali, H.; Henderson, T. A new magnetic bead-based, filterless bio-separator with planar electromagnet surfaces for integrated bio-detection systems. Sens. Actuators B Chem. 2000, 6, 34–39. [Google Scholar] [CrossRef]
- Thielicke, E.; Obermeier, E. Microactuators and Their Technologies. Mechatronics 2000, 10, 431–455. [Google Scholar] [CrossRef]
- Pawinanto, R.E.; Yunas, J.; Said, M.M.; Majlis, B.Y.; Hamzah, A.A. Design Consideration of Planar Embedded Micro-Coils for Electromagnetic Actuator of Fluids Injection System. Middle-East J. Sci. Res. 2014, 19, 538–543. [Google Scholar] [CrossRef]
- Pawinanto, R.E.; Yunas, J.; Majlis, B.Y.; Hamzah, A.A. Design and Fabrication of Compact MEMS Electromagnetic Micro-Actuator with Planar Micro-Coil Based on PCB. Telkomnika 2016, 14, 856–866. [Google Scholar] [CrossRef]
- Engel, A.; Friedrichs, R. On the electromagnetic force on a polarizable body. Am. J. Phys. 2002, 70, 428432. [Google Scholar] [CrossRef]
- Sugandi, G.; Yunas, J.; Hamzah, A.A.; Noor, M.M.; Wiranto, G.; Majlis, B.Y. Design, Fabrication and Characterization of Electrodynamically Actuated MEMS-Speaker. ASM Sci. J. 2019, 12, 125–130. [Google Scholar]
- Abhari, F.; Jaafar, H.; Yunus, N.A. A Comprehensive Study of Micropump Technologies. Int. J. Electrochem. Sci. 2012, 7, 9765–9780. [Google Scholar]
- Rahbar, M.; Shannon, L.; Gray, B.L. Microfluidic active mixers employing ultra-high aspect-ratio rare-earth magnetic nano-composite polymer artificial cilia. J. Micromech. Microeng. 2014, 24, 025003. [Google Scholar] [CrossRef]
- Varadan, V.K. Microelectromechanical Systems (MEMS); Wiley: Hoboken, NJ, USA, 2003; pp. 1–49. [Google Scholar]
- Dai, X.; Xie, H. A simple and residual-layer-free solute- solvent separation soft lithography method. J. Micromech. Microeng. 2015, 25, 10–18. [Google Scholar] [CrossRef]
- Pramanick, B.; Dey, P.K.; Das, S.; Bhattacharya, T.K. Design and Development of a PDMS Membrane based SU-8 Micropump for Drug Delivery System. J. ISSS 2013, 2, 1–9. [Google Scholar]
- Ni, J.; Wang, B.; Chang, S.; Lin, Q. An integrated planar magnetic micropump. Microelectron. Eng. 2013, 117, 35–40. [Google Scholar] [CrossRef]
- Munas, F.R.; Amarasinghe, Y.W.; Dao, D. Review on MEMS based Micropumps for Biomedical Applications. Int. J. Innov. Res. Sci. Eng. Technol. 2015, 4, 5602–5615. [Google Scholar]
- Zhang, R.; You, F.; Lv, Z.; He, Z.; Wang, H.; Huang, L. Development and Characterization a Single-Active-Chamber Piezoelectric Membrane Pump with Multiple Passive Check Valves. Sensors 2016, 16, 2108. [Google Scholar] [CrossRef]
- Wu, C.H.; Chen, C.W.; Kuo, L.S.; Chen, P.H. A Novel Approach to Measure the Hydraulic Capacitance of a Microfluidic Membrane Pump. Adv. Mater. Sci. Eng. 2014. [Google Scholar] [CrossRef]
- Qin, D.; Xia, Y.; Whitesides, G.M. Soft lithography for micro- and nanoscale patterning. Nat. Protoc. 2010, 5, 491–501. [Google Scholar] [CrossRef] [PubMed]
- Au, A.K.; Lai, H.; Ben, R.; Folch, A. Microvalves and Micropumps for BioMEMS. Micromachines 2011, 2, 179–220. [Google Scholar] [CrossRef]
- Ghanbari, A.; Nock, V.; Johari, S.; Blaikie, R.; Chen, X.; Wang, W. A micropillar-based on-chip system for continuous force measurement of C. elegans. J. Micromech. Microeng. 2012, 22, 095009. [Google Scholar] [CrossRef]
- Yunas, J.; Pawinnto, R.E.; Indah, N.; Alva, S.; Sebayang, D. The Electrical and Mechanical Characterization of Silicon Based Electromagnetic Microactuator for Fluid Injection System. J. Eng. Sci. Technol. 2018, 13, 2606–2615. [Google Scholar]
- Said, M.M.; Yunas, J.; Bais, B.; Hamzah, A.A.; Majlis, B.Y. Electromagnetic micrpump with a matrix-patterned magnetic polymer composite actuator membrane. Micromachines 2018, 9, 1–10. [Google Scholar]
- Xue, W.; Cui, T. Polymer Magnetic Microactuators Fabricated with Hot Embossing and Lyer-by-Layer Nano Self-Assembly. J. Nanosci. Nanotechnol. 2007, 7, 2647–2653. [Google Scholar] [CrossRef]
- Low, Z.X.; Chua, Y.T.; Ray, B.M.; Mattia, D.; Metcalfe, I.S.; Patterson, D.A. Perspective on 3D printing of separation membranes and comparison to related unconventional fabrication techniques. J. Membr. Sci. 2017, 523, 596–613. [Google Scholar] [CrossRef]
- Amin, R.; Joshi, A.; Tasoglu, S. Commercialization of 3D-printed microfluidics devices. J. 3D Print. Med. 2017, 1, 85–89. [Google Scholar] [CrossRef]
- Lee, Y.S.; Bhattacharjee, N.; Folch, A. 3D-printed Quake-style microvalves and micropumps. Lab Chip 2018, 8, 1207–1214. [Google Scholar] [CrossRef]
- Zhou, Z.; He, G.; Zhang, K.; Zhao, Y.; Sun, D. 3D-Printed membrane microvalves and microdecoder. Microsyst. Technol. 2019, 25, 4019–4025. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J.; Choi, B. 3D Printed Fluidic Valves for Remote Operation via External Magnetic Field. Int. J. Precis. Eng. Manuf. 2016, 17, 937–942. [Google Scholar] [CrossRef]
- Au, A.K.; Bhattacharjee, N.; Horowitz, L.S.; Chang, T.C.; Folch, A. 3D-Printed Microfluidic Automation. Lab Chip 2015, 15, 1934–1940. [Google Scholar] [CrossRef] [PubMed]
- Thevenota, J.; Oliveira, H.; Sandre, O.; Lecommandoux, S. Magnetic responsive polymer composite materials. Chem. Soc. Rev. 2013, 42, 7099–7116. [Google Scholar] [CrossRef] [PubMed]
- Yeh, Y.H.; Cho, K.H.; Chen, L.J. Effect of the softness of polydimethylsiloxine on the hydrophobicity of pillar-like patterned surfaces. Soft Matter. 2012, 8, 1079. [Google Scholar] [CrossRef]
- Tahmasebipour, M.; Paknahad, A.A. Unidirectional and bidirectional valveless electromagnetic micropump with PDMS-Fe3O4 nanocomposite magnetic membrane. J. Micromech. Microeng. 2019, 29, 075014. [Google Scholar] [CrossRef]
- Zhang, Q.Y.; Zhang, H.P.; Xie, G.; Zhang, J.P. Effect of surface treatment of magnetic particles on the preparation of magnetic polymer microspheres by miniemulsion polymerization. J. Magn. Magn. Mater. 2007, 311, 140–144. [Google Scholar] [CrossRef]
- Lu, A.H.; Salabas, E.L.; Schuth, F. Magnetic nanoparticles: Synthesis, protection, functionalization, and application. Angew. Chem.-Int. Ed. 2007, 46, 1222–1244. [Google Scholar] [CrossRef]
- Suter, M.; Ergeneman, O.; Zürcher, J.; Moitzi, C.; Pané, S.; Rudin, T.; Pratsinis, S.E.; Nelson, B.J.; Hierold, C. A photopatternable superparamagnetic nanocomposite: Material characterization and fabrication of microstructures. Sens. Actuators B Chem. 2011, 156, 433–443. [Google Scholar] [CrossRef]
- Fahrni, F. Magnetic Polymer Actuators for Microfluidics. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherland, 2009. [Google Scholar] [CrossRef]
- Liu, C. Recent developments in polymer MEMS. Adv. Mater. 2007, 19, 3783–3790. [Google Scholar] [CrossRef]
- Rahbar, M. Design, Fabrication and Testing of Magnetic Composite Polymer Actuators Integrated With Microfluidic Devices and Systems. Ph.D. Thesis, Simon Fraser University, Burnaby, BC, Canada, 2016. [Google Scholar]
- Schneider, F.; Draheim, J.; Müller, C.; Wallrabe, U. Optimization of an adaptive PDMS-membrane lens with an integrated actuator. Sens. Actuators A 2009, 154, 316–321. [Google Scholar] [CrossRef]
- Dai, Q.; Berman, D.; Virwani, K.; Frommer, J.; Jubert, P.O.; Lam, M.; Topuria, T.; Imaino, W.; Nelson, A. Self-assembled ferrimagnet--polymer composites for magnetic recording media. Nano Lett. 2010, 10, 3216–3221. [Google Scholar] [CrossRef] [PubMed]
- Cho, H.J.; Ahn, C.H. A bidirectional magnetic microactuator using electroplated permanent magnet arrays a bidirectional magnetic microactuator using electroplated permanent magnet arrays. J. Microelectromicromechanical Syst. 2002, 11, 78–84. [Google Scholar] [CrossRef]
- Su, Y.; Chen, W. Investigation on electromagnetic microactuator and its application in Micro-Electro-Mechanical System (MEMS). In Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 5–8 August 2007; pp. 3250–3254. [Google Scholar]
- Samaniego, L.F.P. Design Magnetically Actuated Surgical Devices Using Magnetic Micro-Particles Embedded in a Polymeric Matrix. Master’s Thesis, University of Groningen, Groningen, The Netherlands, 2018. [Google Scholar]
- Dogangil, G.; Davies, B.L.; Baena, F.R. A review of medical robotics for minimally invasive soft tissue surgery. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2010, 224, 653–679. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Wang, Y.; Lavrijsen, R.; Onck, P.R.; den Toonder, J.M.J. Versatile microfluidic flow generated by moulded magnetic artificial cilia. Sens. Actuators B Chem. 2018, 263, 614–624. [Google Scholar] [CrossRef]
- Johari, J.; Yunas, J.; Hamzah, A.A.; Majlis, B.Y. Piezoelectric Micropump with Nanoliter Per Minute Flow for Drug Delivery Systems. Sains Malays. 2011, 40, 275–281. [Google Scholar]
- Wang, Y.H.; Tsai, Y.W.; Tsai, C.H.; Lee, C.Y.; Fu, L.M. Design and analysis of impedance pumps utilizing electromagnetic actuation. Sensors 2010, 10, 4040–4052. [Google Scholar] [CrossRef]
- Pan, T.; McDonald, S.J.; Kai, E.M.; Ziaie, B. A magnetically driven PDMS micropump with ball check-valves. J. Micromech. Microeng. 2005, 15, 1021–1026. [Google Scholar] [CrossRef]
- Yin, H.; Huang, Y.; Fang, W.; Hsieh, J. A novel electromagnetic elastomer membrane actuator with a semi-embedded coil. Sens. Actuators A Phys. 2007, 139, 194–202. [Google Scholar] [CrossRef]
- Nagel, J.J.; Mikhail, G.; Noh, H.M.; Koo, J. Magnetically actuated micropumps using an Fe-pdms composite membrane. SPIE Smart Struct. Mater. 2006, 96, 234–243. [Google Scholar]
- Shen, C.; Liu, H. Innovative composite pdms micropump with electromagnetic drive. Sens. Mater. J. 2010, 22, 85–100. [Google Scholar]
- Said, M.M.; Yunas, J.; Bais, B.; Hamzah, A.A.; Majlis, B.Y. Hybrid polymer composite membrane for an electromagnetic (EM) valveless micropump. J. Micromech. Microeng. 2017, 27, 075027. [Google Scholar] [CrossRef]
- Sadler, D.J.; Oh, K.W.; Ahn, C.H.; Bhansali, S.; Henderson, H.T. A new magnetically actuated microvalve for liquid and gas control applications. In Proceedings of the 10th International Conference on Solid-State Sensors and Actuators (Transducers ’99), Sendai, Japan, 7–10 June 1999; pp. 1812–1815. [Google Scholar]
- Attila Gaspar, A.; Piyasena, M.E.; Daróczi, L.; Gomez, F.A. Magnetically controlled valve for flow manipulation in polymer microfluidic devices. Microfluid. Nanofluid. 2008, 4, 525–531. [Google Scholar] [CrossRef]
- Bute, M.G.; Sheikh, A.; Mathe, V.L.; Bodas, D.; Karekar, R.N.; Gosavi, S.W. Magnetically controlled flexible valve for flow manipulation in polymer microfluidic devices. In Proceedings of the 1st International Symposium on Physics and Technology of Sensors (ISPTS-1), Pune, India, 7–10 March 2012. [Google Scholar]
- Nakahara, T.; Suzuki, J.; Hosokawa, Y.; Suzuki, T. Fabrication of Magnetically Driven Microvalve Arrays Using a Photosensitive Composite. Magnetochemistry 2018, 4, 7. [Google Scholar] [CrossRef]
- Dario, P.; Croce, N.; Carrozza, M.C.; Varallo, G. A fluid handling system for a chemical microanalyzer. J. Micromech. Microeng. 1996, 6, 95–98. [Google Scholar] [CrossRef]
- Bohm, S.; Olthuis, W.; Bergveld, P. A plastic micropump constructed with conventional techniques and materials. Sens. Actuators A 1999, 77, 223–228. [Google Scholar] [CrossRef]
- Khoo, M.; Liu, C. A novel micromachined magnetic membrane microfluid pump. In Proceedings of the 22nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 23–28 July 2000; pp. 2394–2397. [Google Scholar]
- Shen, M.; Yamahata, C.; Gijs, M.A. A high-performance compact electromagnetic actuator for a PMMA ball-valve micropump. J. Micromech. Microeng. 2008, 18, 025031. [Google Scholar] [CrossRef]
- Dich, N.Q.; Dinh, T.X.; Pham, P.H.; Dau, V.T. Study of valveless electromagnetic micropump by volume-of-fluid and open FOAM. Jpn. J. Appl. Phys. 2015, 54, 057201. [Google Scholar] [CrossRef]
- Cai, G.; Xue, L.; Zhang, H.; Lin, J. A Review on Micromixers. Micromachines 2017, 8, 274. [Google Scholar] [CrossRef]
- Tang, S.Q.; Li, K.H.H.; Yeo, Z.T.; Chan, W.X.; Tan, S.H.; Yoon, Y.J.; Ng, S.H. Study of concentric, eccentric and split type magnetic membrane micro-mixers. Sens. Bio-Sens. Res. 2018, 19, 14–23. [Google Scholar] [CrossRef]
- Zhou, B.; Xu, W.; Syed, A.A.; Chau, Y.; Chen, L.; Chew, B.; Yassine, O.; Wu, X.; Gao, Y.; Zhang, J.; et al. Design and fabrication of magnetically functionalized flexible micropillar arrays for rapid and controllable microfluidic mixing. Lab Chip 2015, 15, 2125–2132. [Google Scholar] [CrossRef]
- Pawinanto, R.E.; Yunas, J.; Hashim, A.M. Design optimization of active microfluidic mixer incorporating micropillar on flexible membrane. Microsyst. Technol. 2019, 25, 1203–1209. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polymer Name | Density | Young’s Modulus (GPa) | Poisson’s Ratio | Thermal Expansion Coefficient @25 °C (10−6 K−1) | Thermal Conductivity (W/mK) | Property Utilized | Process |
|---|---|---|---|---|---|---|---|
| PMMA [41,42] | 1.17–1.2 | 3.1–3.3 | 0.35 | 70–90 | 0.186 | Little elasticity, optical property | LIGA, Hot embossing |
| Parylene [43] | 1.289 | 4.5 | 0.4 | 35 | - | Vapor barrier | Coating |
| PDMS [29,39,44] | 0.97 | 0.36–0.87 | 0.5 | 310 | 0.18 | Elasticity | Molding |
| Polyimide [45,46,47] | 1.42 | 3 | 0.34 | 30–60 | 0.1–0.35 | Little elasticity | Coating |
| Working Principle | Schematic of Actuator System | Advantages | Disadvantages | Typical Applications |
|---|---|---|---|---|
| Piezoelectric [9,50,51] |  | High pressure Fast response | Complicated process High input voltage, low reliability | Micropump, microvalve, microgripper |
| Electrostatic [52,53,54,55] |  | Low Power Fast response Controlled large deformation through input voltage | Small membrane deformation, low reliability | Micromotor, microshutter, micromirror microrelay, micropump |
| Electromagnetic [9,12,49,56] |  | High pressure. High membrane deformation Easy control thrugh input current Fast response Large frequency range. | Large size. Thermal effect | Micromotors, micro relay, switch, micro pump, valve, mixers, microspeaker and magnetostrictive |
| Polymer composite Electroactive [57] |  | High deformation Low power Ability to work at wet environment Low footprint | New actuation mechanism. Complicated structure and process Very limited application | Micro robotic, micromanipulators |
| Thermo-pneumatic [11,58] |  | High pressure | Specific material high power consumption long response time. Limited application | Micropump, microvalve, inkjet printhead |
| References | Actuating Element (Structure, Material or Method) | Magnet Type | Input | Specifications |
|---|---|---|---|---|
| Biosample Delivery and Transport | ||||
| Yamahata et al. 2015 [60] | PDMS membrane & magnet | Iron powder | 33–150 mA | Flowrate: 0.4–1.6 mL/min Frequency: 6–12 Hz |
| Büttgenbach, 2014 [61] | EM Micromotor rotation & polymer magnet | 90 wt% ceramic ferrites + polymer | 70 mA | Forces: 1.2 mN Torque: 10 μNm |
| Lee et al. 2011 [62] | Silicon catheter | Electroplated nickel | 70 to 1500 Hz (resonant frequency) | Angle > 60° |
| Zhou & Amirouche, 2011 [63] | PDMS membrane & magnet | NdFeB or CoNiMnP plate | 90–180 mA | Magnetic Force: 16 µN Flowrate: 319.6 µL Frequency: 36.9 Hz |
| Biosample Preparation | ||||
| Nouri et al. 2017 [64] | Magnetohydrodynamic interaction with permanent magnet | Fe3O4 nanoparticles | 3000 Gauss | Mixing time: 80 s Mixing index: 0.9 s |
| Liu et al. 2016 [65] | PDMS with permanent magnet | Magnetic composite (carbonyl iron) | 6 V, 18 Hz | Mixing time: 2 min Flow rate: 20 μL/s |
| Biocell and Drug Particles Manipulation | ||||
| Banis et al. 2020 [66] | water-soluble ferrofluid material (FluidMAG lipid) | Electromagnetic coils | 4 to 8 A Magnetic particle size 100 nm | Droplet velocity 135 µm/s |
| Rinklin et al. 2016 [67] | Magnetophoretic attraction of microbeads | carboxyl functionalized particles (Dynabeads) and laminated magnetic NiFe parts | 5, 10 and 15 mA | Maximum particle levitation height of approximately 10 μm |
| Chen et al. 2015 [68] | PDMS tweezer with hexapole yoke | 10 layers of laminated magnetic NiFe parts | feedback control at a speed of up to 1 kHz | Maximum force = 400 pN, force distribution with actuation from −30 µm to 30 µm |
| Choi et al. 2000 [69] | silicon cantilever | Encapsulated permalloy | N/A | N/A |
| Year | Membrane Structure | Flowrate | Frequency | References |
|---|---|---|---|---|
| 1995 | Thermoplastic molding bulk permanent magnet | 780 µL/min | 5 Hz | Dario et al. [123] |
| 1999 | Silicon rubber | 2.1 mL/min | 50 Hz | Bohm et al. [124] |
| 2000 | PDMS + plate alloy | 1.2 µL/min | 2.9 Hz | Khoo dan Liu [125] |
| 2005 | PDMS + bulk permanent magnet | 774 µL/min | n.a | T.Pan et al. [114] |
| 2005 | PMMA and composite PDMS + powder NdFeB | 400 µL/min | 12 Hz | Yamahata et al. [60] |
| 2006 | Composite PDMS + powder Fe | 35 µL/min | 1.73 Hz | Nagel [116] |
| 2007 | PDMS + bulk permanent magnet | 2 µL/min | n.a | Yin et al. [115] |
| 2008 | PDMS + bulk magnet NdFeB and PMMA | 6.8 mL/min | 20 Hz | M.Shen et al. [126] |
| 2010 | Composite PDMS + powder Fe | 1.623 mL/min | 6–7 Hz | Shen and Liu [117] |
| 2011 | Composite PDMS + plated NdFeB | 319.6 µL/min | 36.9 Hz | Zhou and Amirouche [63] |
| 2015 | PDMS + magnet pad | n.a | 28–30 Hz | Dich et al. [127] |
| 2017 | Composite PDMS + NdFeB particles | 6.52 nL/min | 1 Hz | Said et al. [88,118] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yunas, J.; Mulyanti, B.; Hamidah, I.; Mohd Said, M.; Pawinanto, R.E.; Wan Ali, W.A.F.; Subandi, A.; Hamzah, A.A.; Latif, R.; Yeop Majlis, B. Polymer-Based MEMS Electromagnetic Actuator for Biomedical Application: A Review. Polymers 2020, 12, 1184. https://doi.org/10.3390/polym12051184
Yunas J, Mulyanti B, Hamidah I, Mohd Said M, Pawinanto RE, Wan Ali WAF, Subandi A, Hamzah AA, Latif R, Yeop Majlis B. Polymer-Based MEMS Electromagnetic Actuator for Biomedical Application: A Review. Polymers. 2020; 12(5):1184. https://doi.org/10.3390/polym12051184
Chicago/Turabian StyleYunas, Jumril, Budi Mulyanti, Ida Hamidah, Muzalifah Mohd Said, Roer Eka Pawinanto, Wan Amar Fikri Wan Ali, Ayub Subandi, Azrul Azlan Hamzah, Rhonira Latif, and Burhanuddin Yeop Majlis. 2020. "Polymer-Based MEMS Electromagnetic Actuator for Biomedical Application: A Review" Polymers 12, no. 5: 1184. https://doi.org/10.3390/polym12051184
APA StyleYunas, J., Mulyanti, B., Hamidah, I., Mohd Said, M., Pawinanto, R. E., Wan Ali, W. A. F., Subandi, A., Hamzah, A. A., Latif, R., & Yeop Majlis, B. (2020). Polymer-Based MEMS Electromagnetic Actuator for Biomedical Application: A Review. Polymers, 12(5), 1184. https://doi.org/10.3390/polym12051184