Resource Allocation Model for Sensor Clouds under the Sensing as a Service Paradigm


Abstract
:1. Introduction
- Resource allocation model for sensor clouds under the Se-aaS paradigm, assuming that applications have bindings to mashups managed in the cloud;
- Heuristic algorithm having the just mentioned model as a basis.
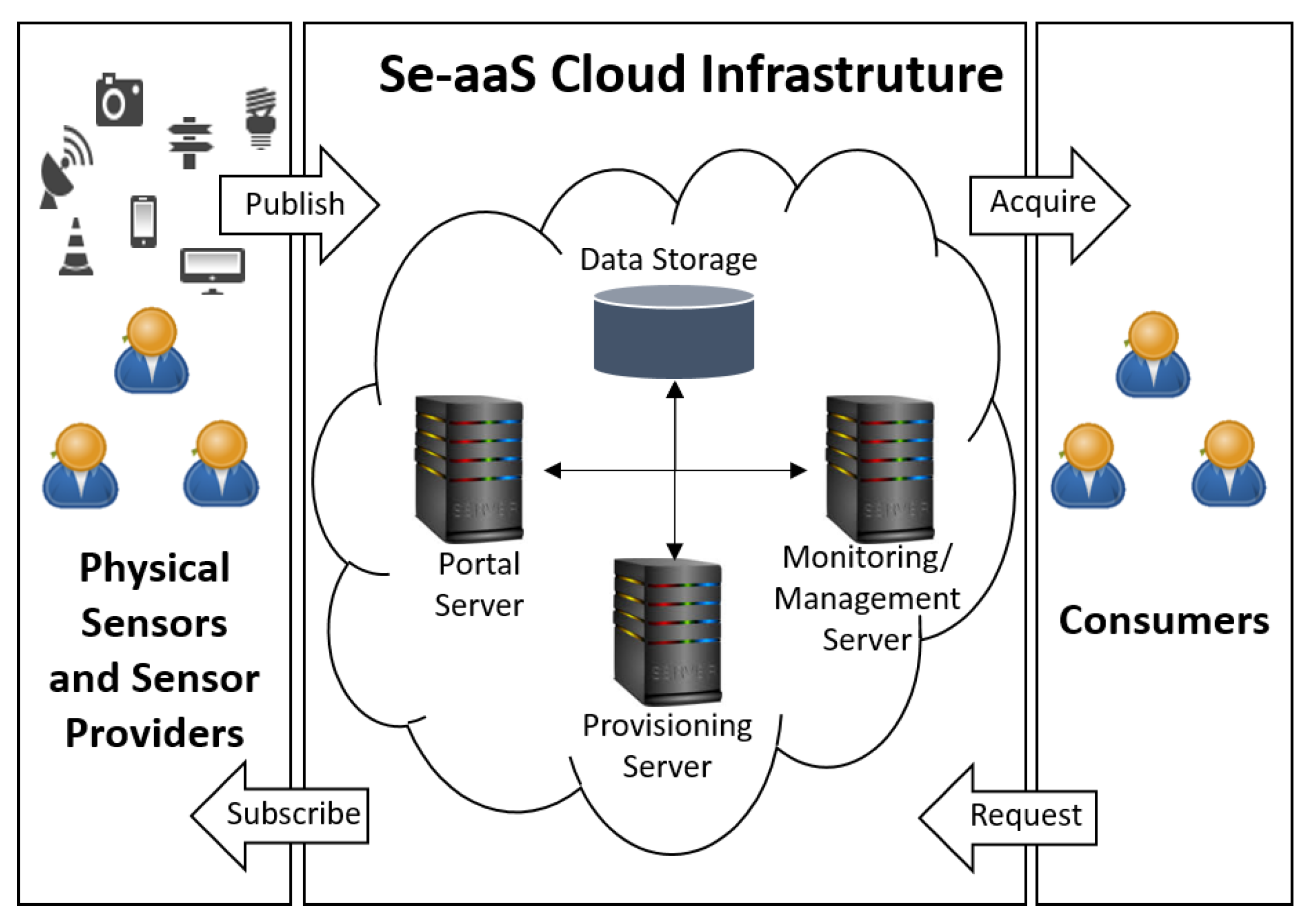
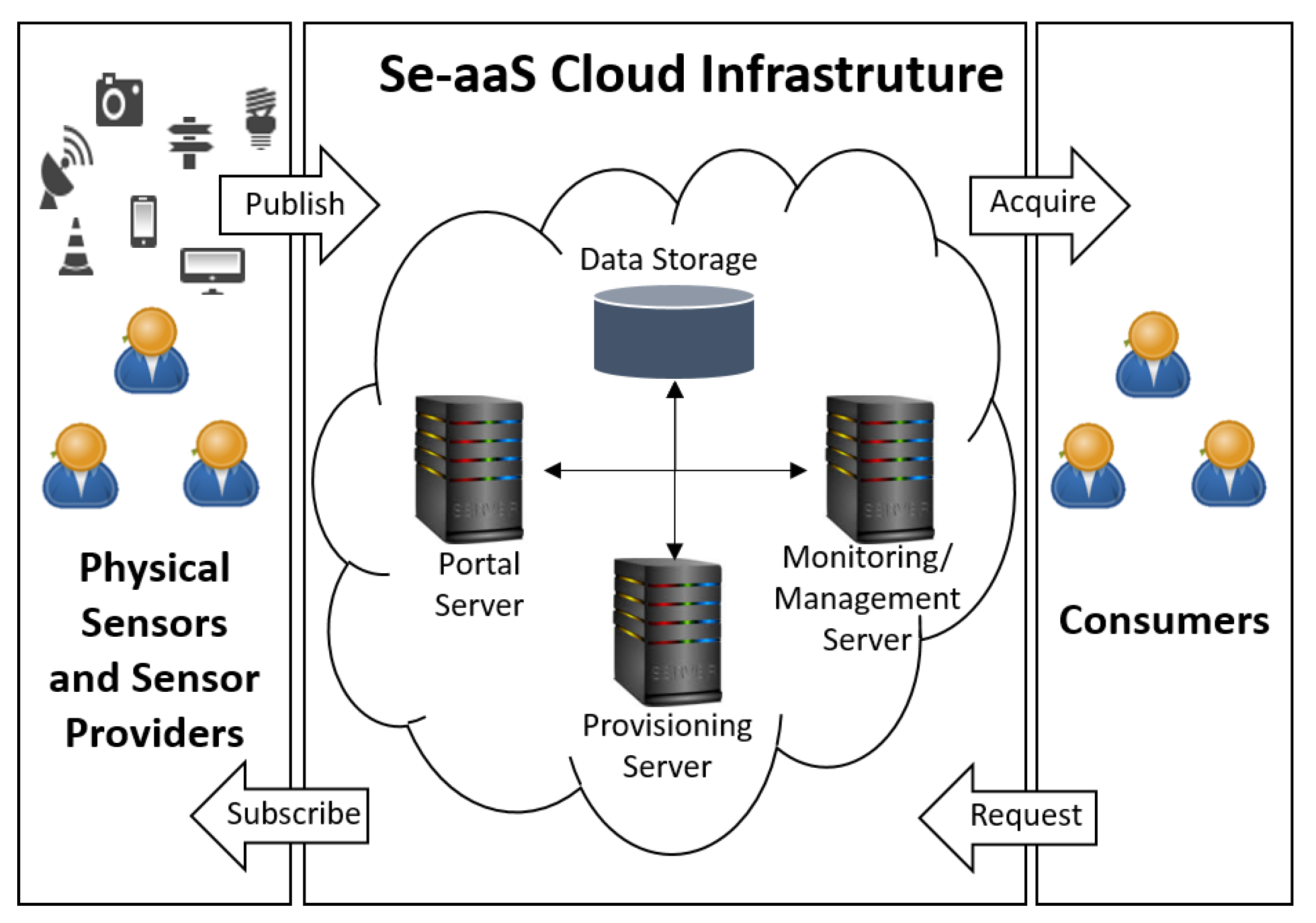
2. Cloud-Based Sensing-as-a-Service
2.1. Architecture
- Underlying complexity should be hidden, so that services and applications can be launched without much overhead;
- Scalability, ensuring a low cost-of-service per consumer while avoiding infrastructure upgrade;
- Dynamic service provisioning for pools of resources to be efficiently used by consumers.
2.2. System Functionalities
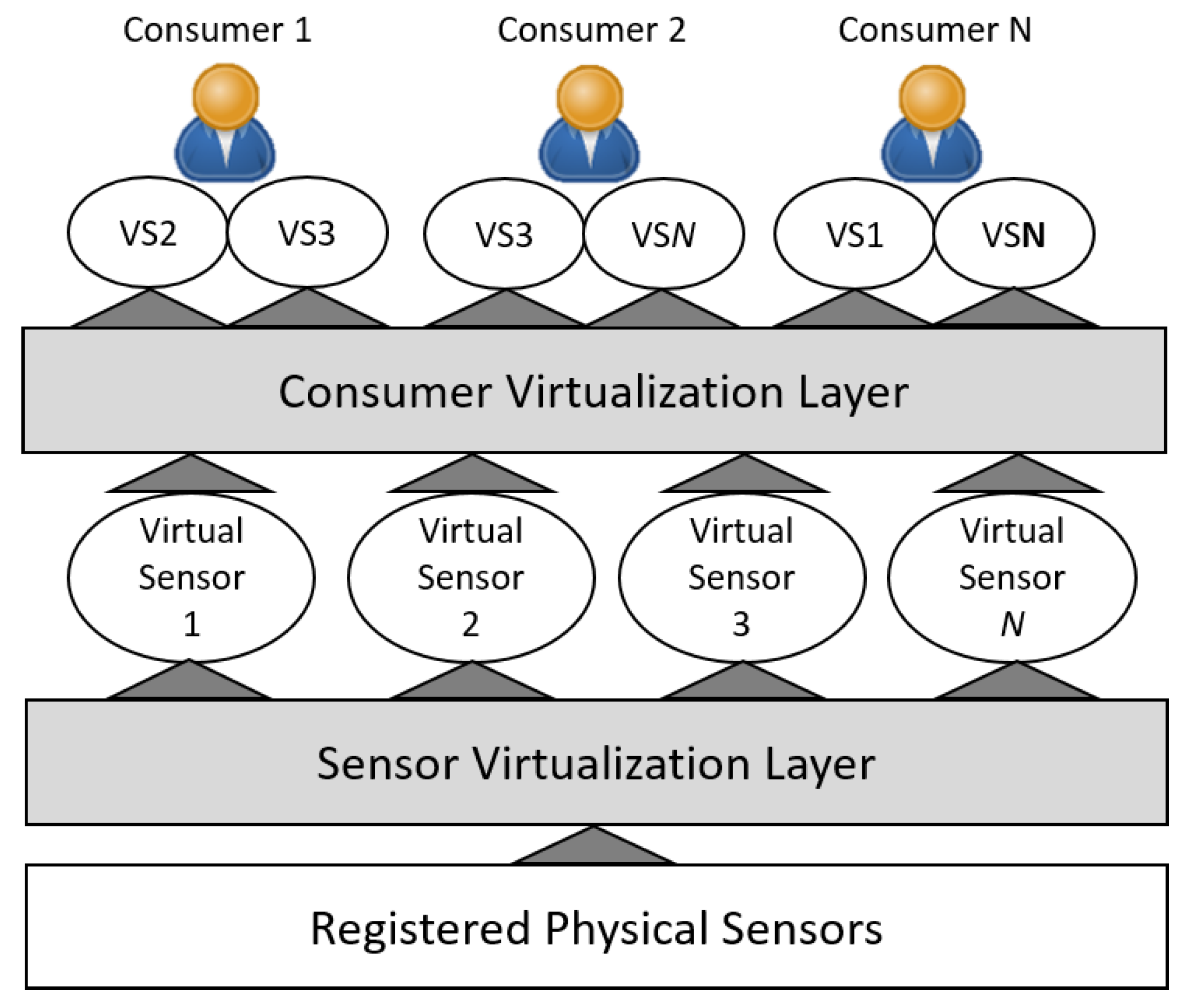
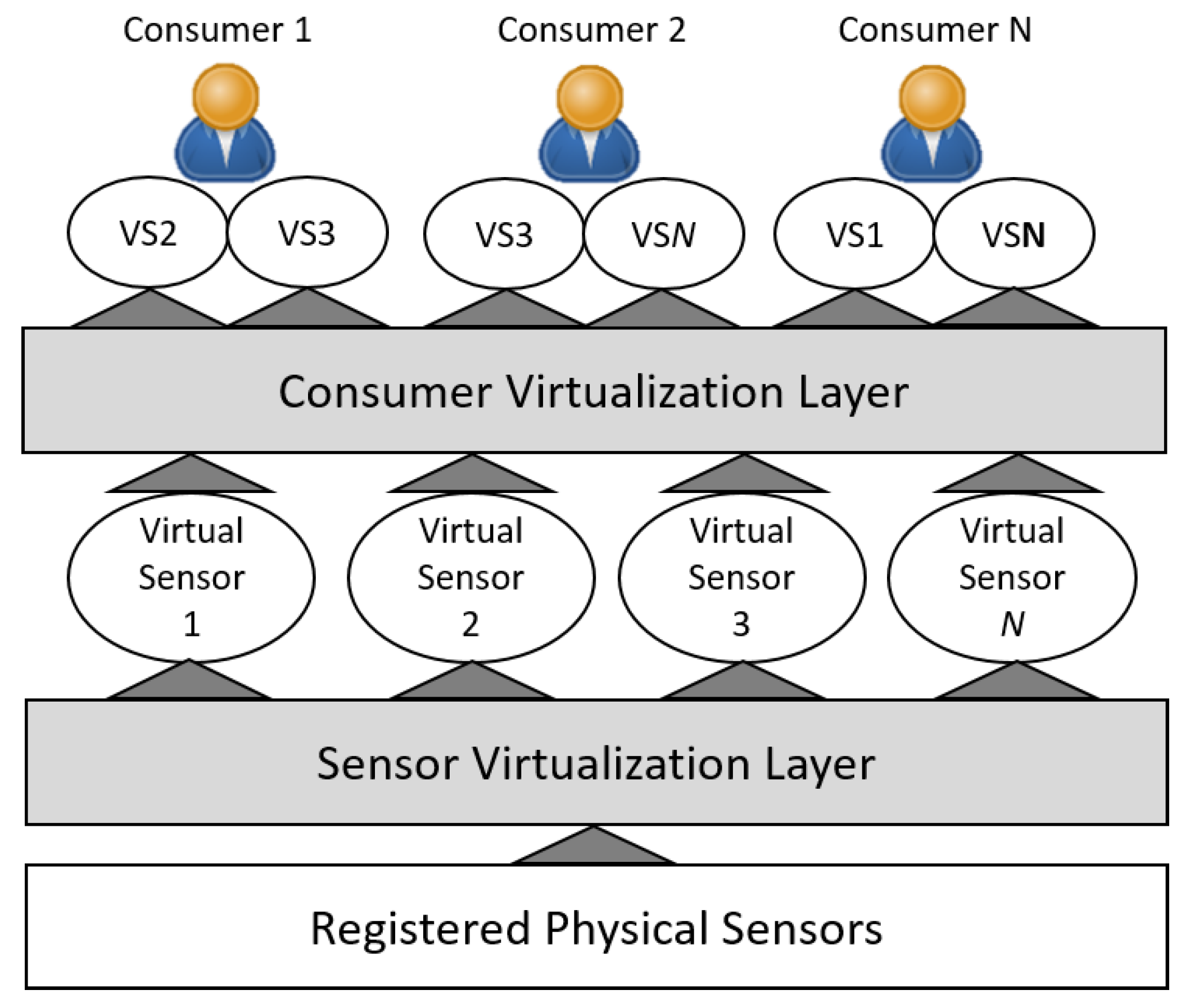
- Virtualization: Sensor virtualization is used to enable the management and customization of devices by clients/applications/consumers, allowing a single device to be linked to one or multiple consumers. Groups of virtual sensors can be made available for specific purposes. Virtualization is illustrated in Figure 2.
- Dynamic Provisioning: This allows consumers to leverage the vast pool of resources on demand. A virtual workspace (e.g., virtual machine) is usually created for the provisioning of virtual sensors, which can be under the control of one or more consumers. Virtual workspace instances are provisioned on demand, and should be as close as possible to the consumer’s zone.
- Multi-Tenancy: A high degree of multi-tenancy in architectures allows sharing of sensors and data by consumers, and dedicated instances for each sensor provider. Issues like scaling according to policies, load balancing and security need to be considered.
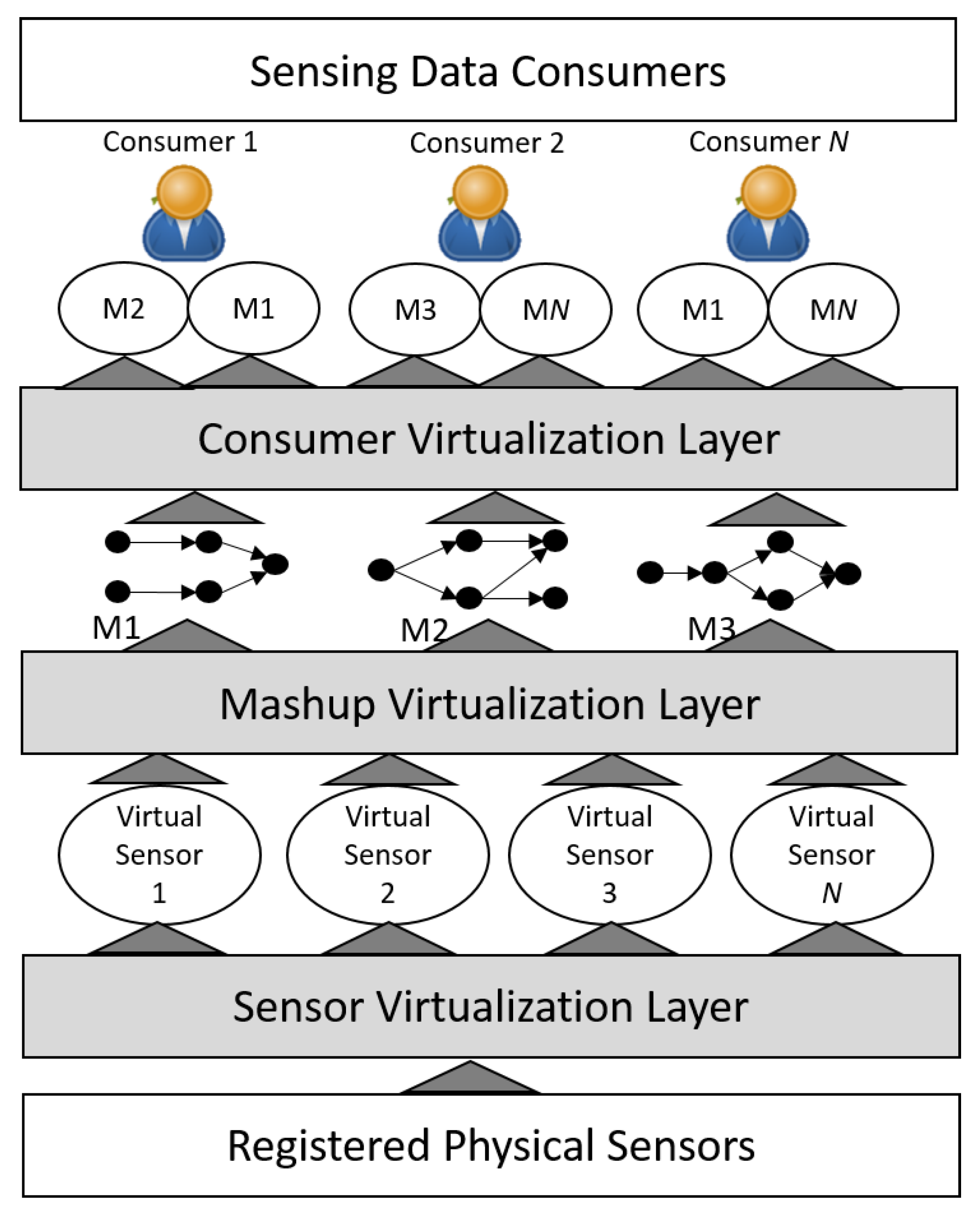
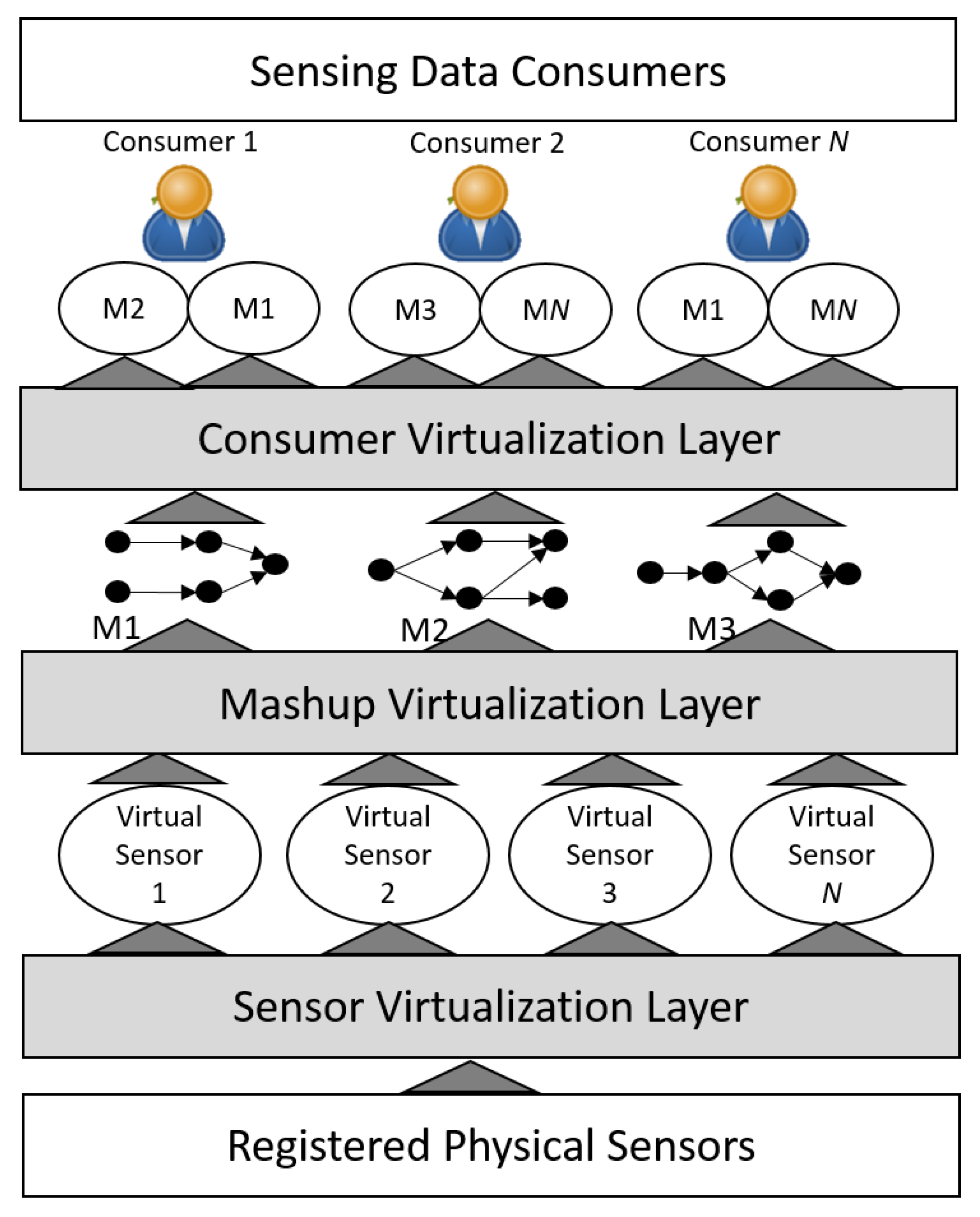
2.3. Embedding Mashups into the Cloud
- Mapping between one or more mashup elements (defined by consumers) and a virtual Thing, for resource optimization.
- Mapping between virtual Things and physical Things (materialization onto devices).
- Placement of virtual Thing workspaces in the cloud.
3. Related Work
4. Resource Allocation Model
4.1. Definitions and Assumptions
4.2. Formalization
- is a physical-to-virtual (P2V) transfer cost associated with the flow of data from physical Things to virtual Thing’s workspace in the cloud. This is zero if , meaning that is not used in the materialization of ’s virtual Thing;
- is a virtual-to-virtual (V2V) transfer cost associated with the flow of data between virtual Things’ workspaces of partitions and . This is zero if no flow between workspaces is required;
- is a virtual-to-application (V2A) transfer cost associated with flow of data from virtual Things’ workspaces to user applications. This is zero if the application is supposed to consume such data.
4.3. Resource Allocation Algorithm
- As physical Things are registered in the cloud, a pool of possible materializations is computed for each functionality, denoted by , using SPARQL. A materialization may involve one or more registered physical Things, and a physical Thing may be at multiple pools.
- As application mashups are inserted in the cloud, an auxiliary graph is updated. The includes all mashup elements, are the links denoting a flow between two elements of a mashup, and are compatibility links between two elements from any mashup. That is, a link between and exists in if: (i) nodes have the same functionality requirement; and (ii) property requirements are compatible (SPARQL is used to determine compatibility).
| Algorithm 1: Resource allocation heuristic |
 |
5. Performance Analysis
5.1. Scenario Setup
- Mashups were randomly generated using the algorithm in [31], which is suitable for the generation of sparse sensor-actuator networks. An average of 10 elements per mashup is defined.
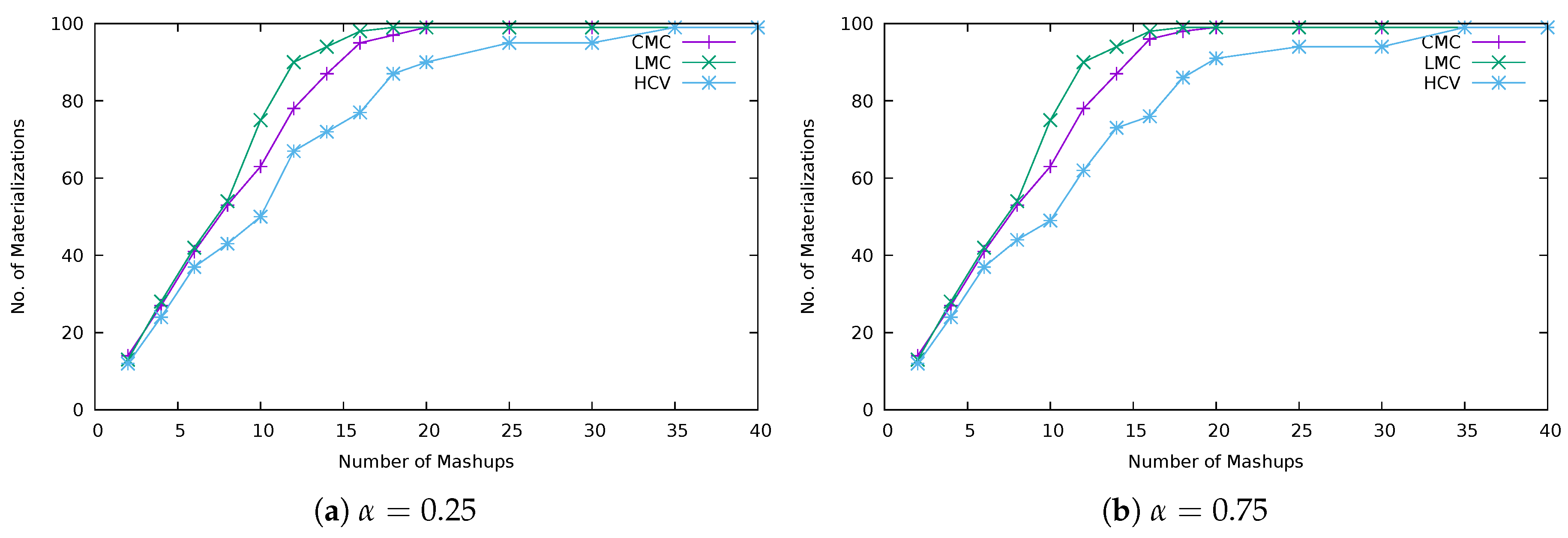
- The functionality required by each mashup element is randomly selected from the pool of functionalities, together with 50% of its properties. Each pair sharing the same functionality requirement is assumed to be compatible with probability .
- A physical Thing has a functionality assigned to it, together with 50% of its properties (randomly extrated from corresponding pool).
- The gap between a property condition and device property is randomly selected from , where is the lowest cost and is the highest (moderate and extreme levels).
5.2. Results
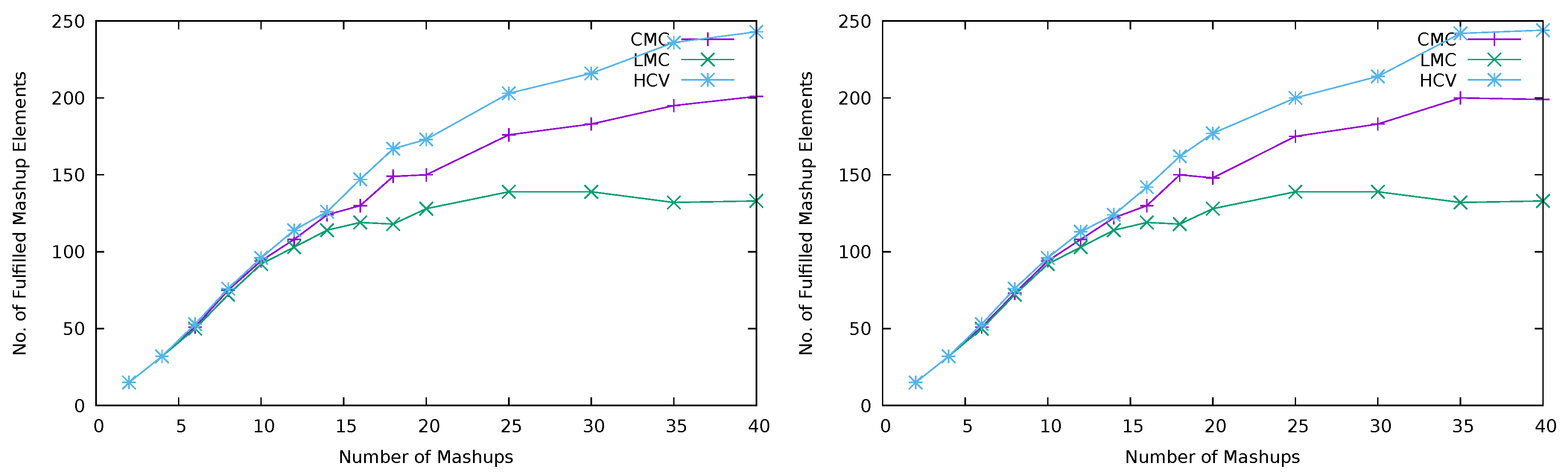
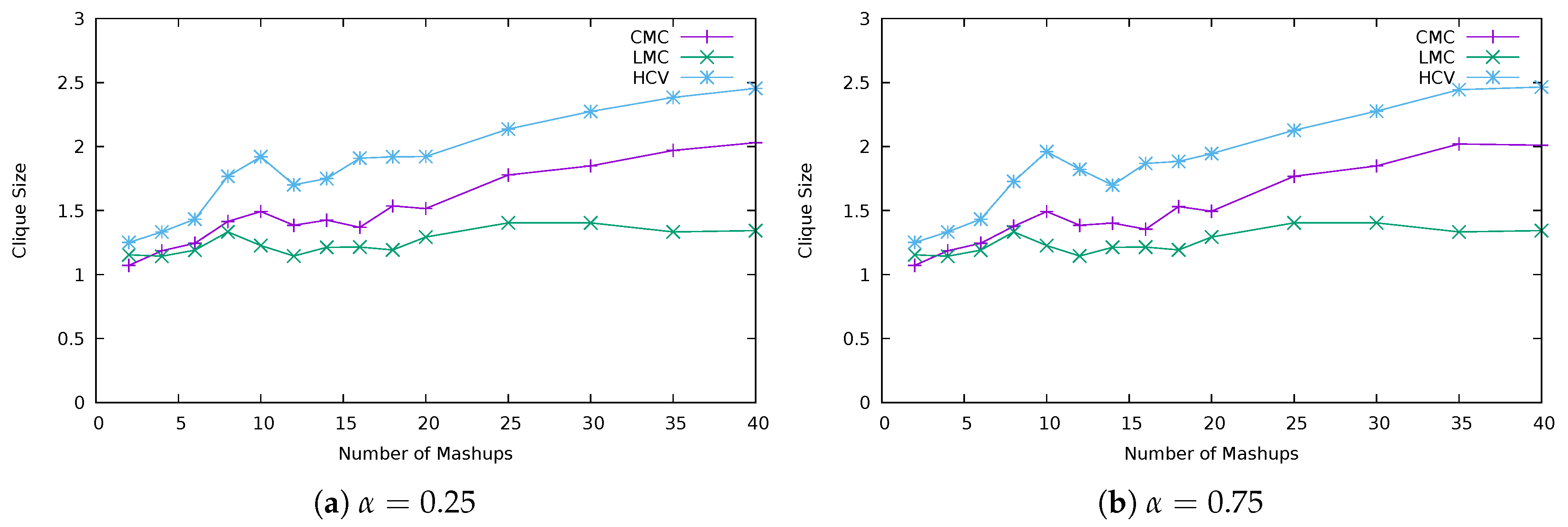
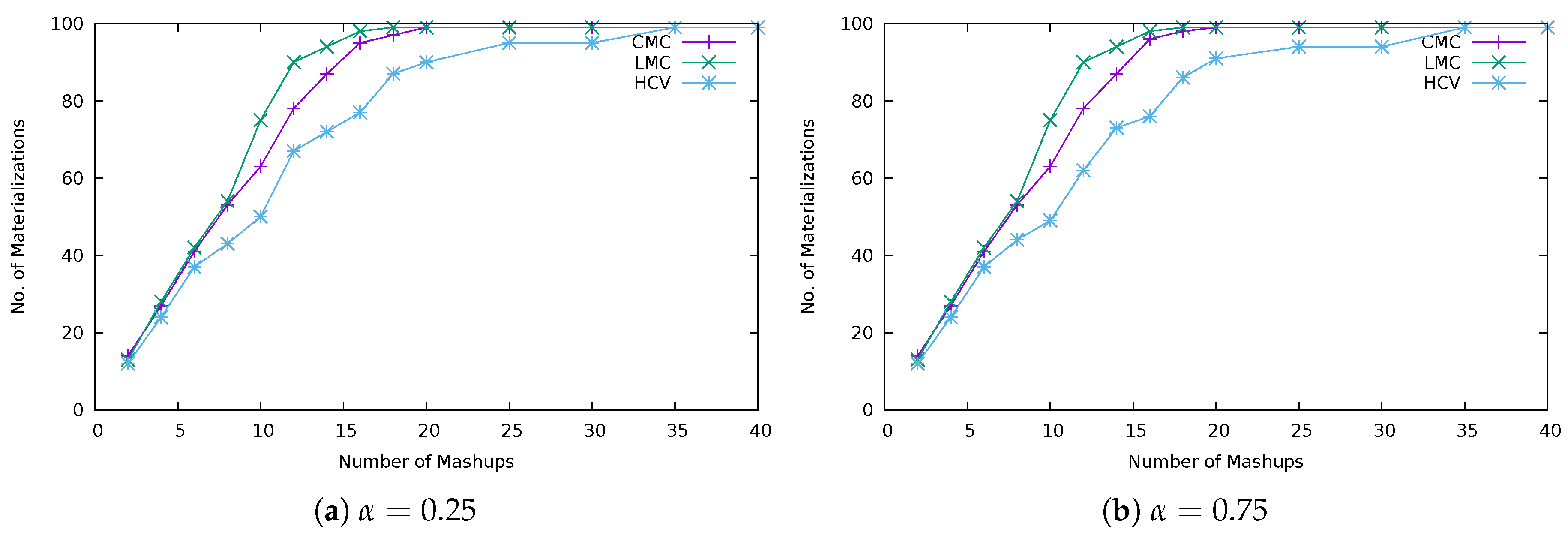
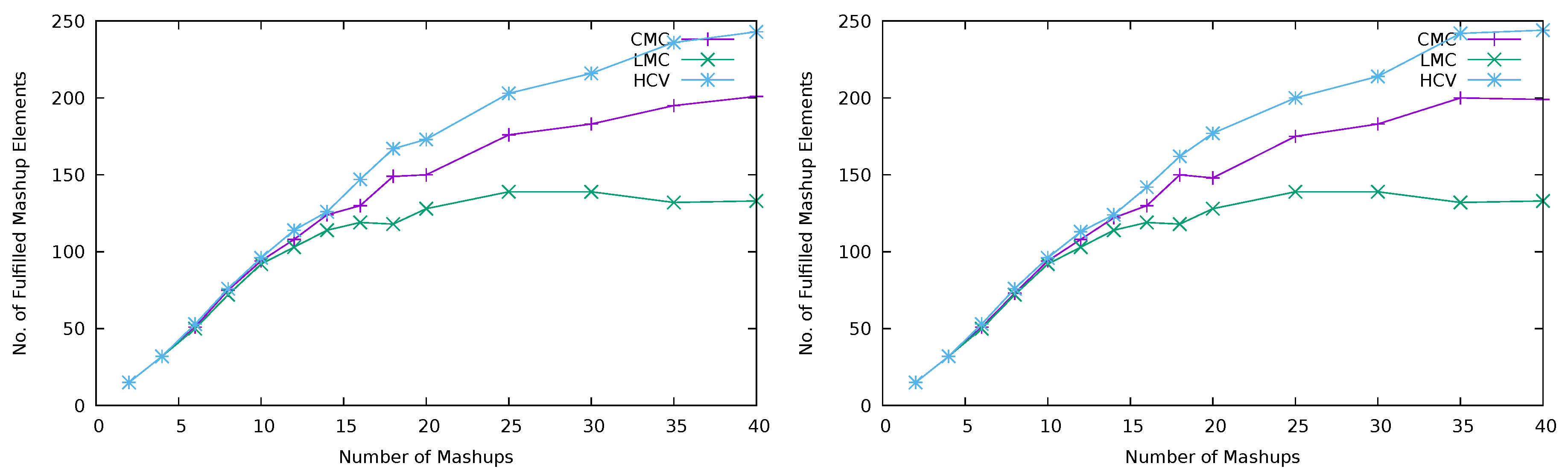
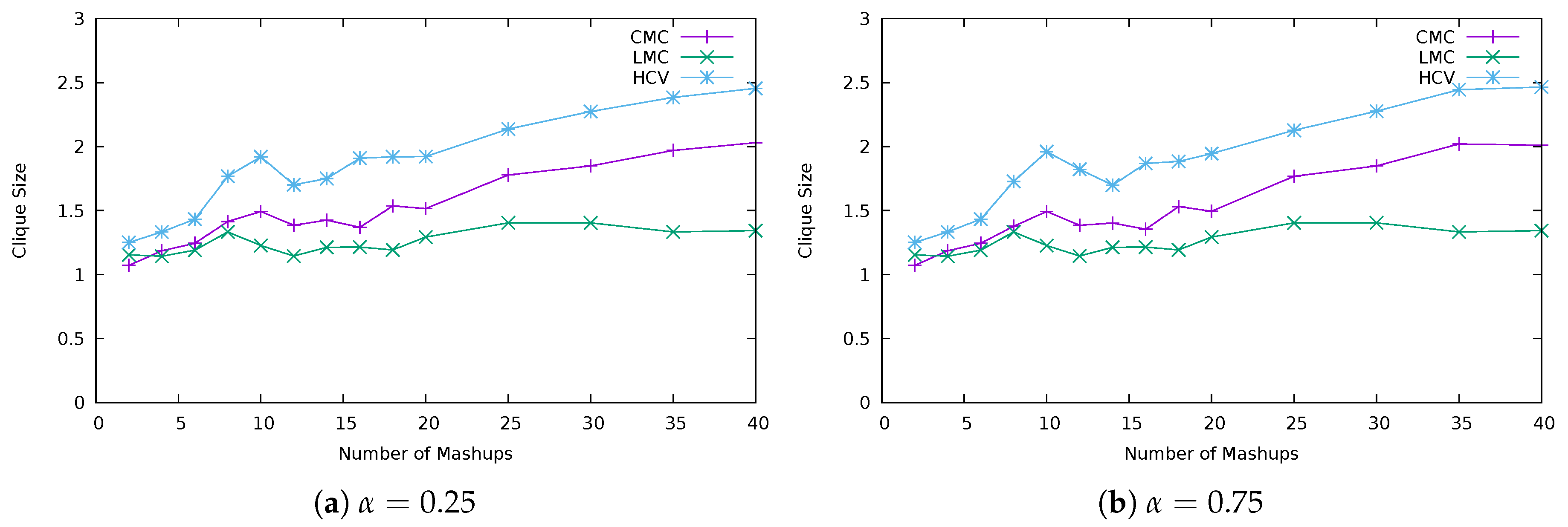
5.2.1. Materializations and Fulfilled Mashup Elements
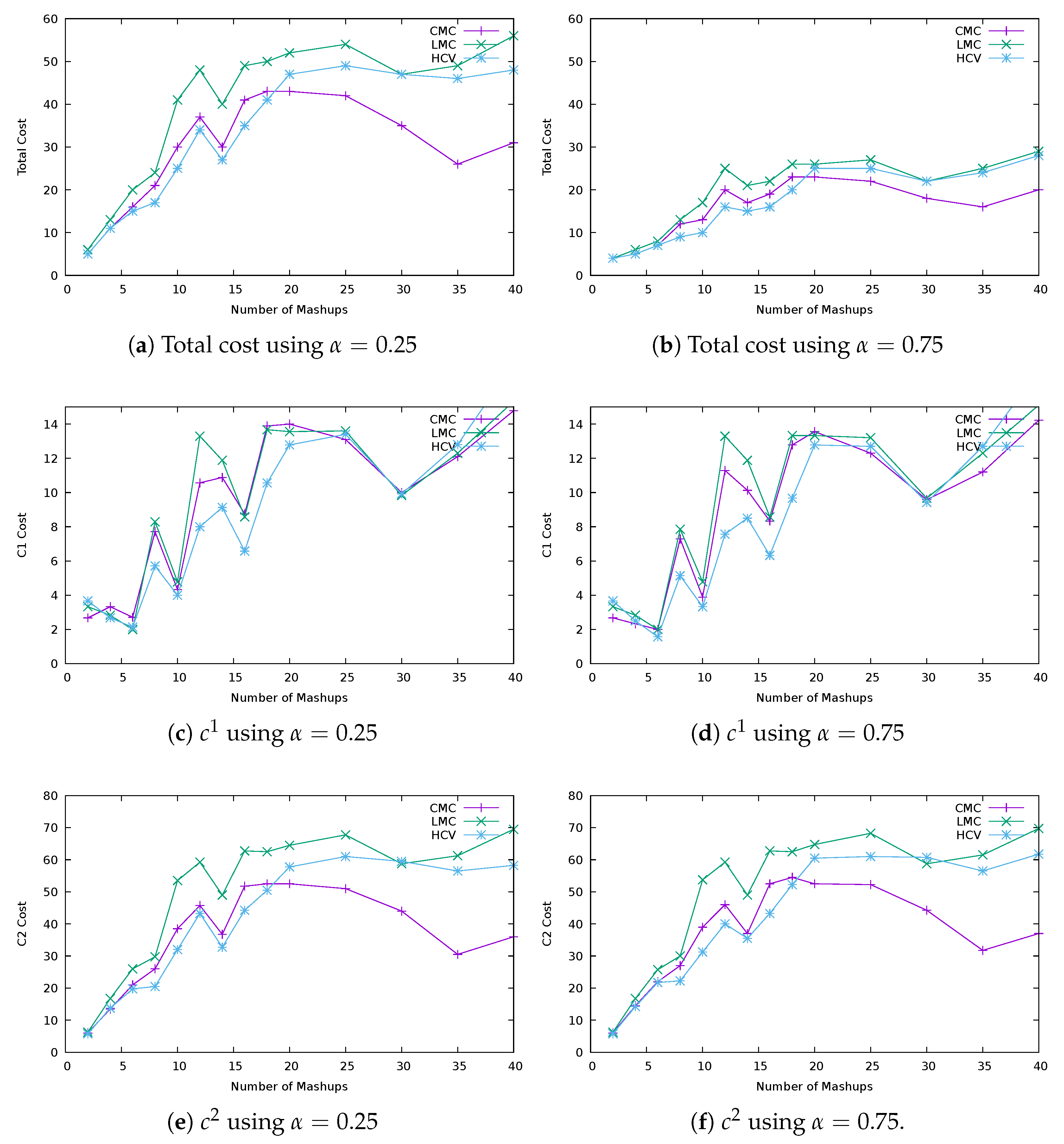
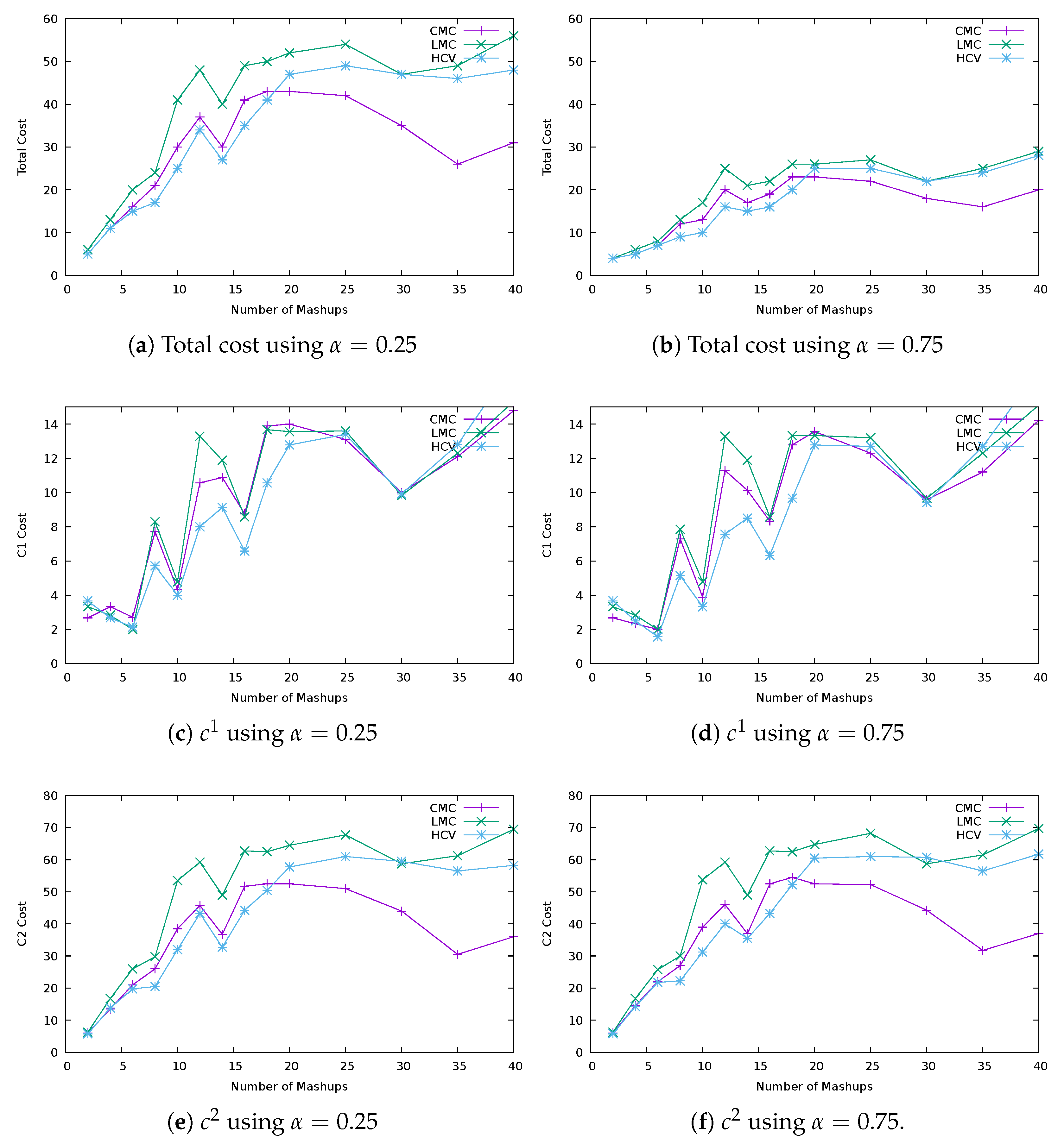
5.2.2. Cost
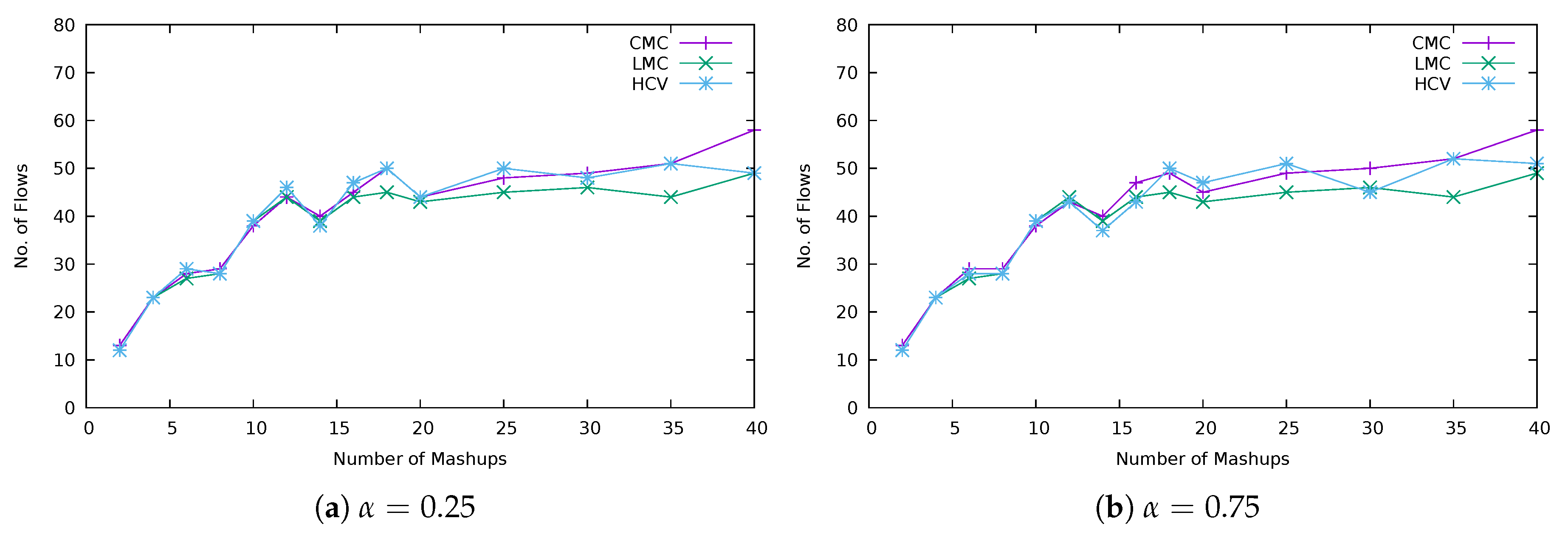
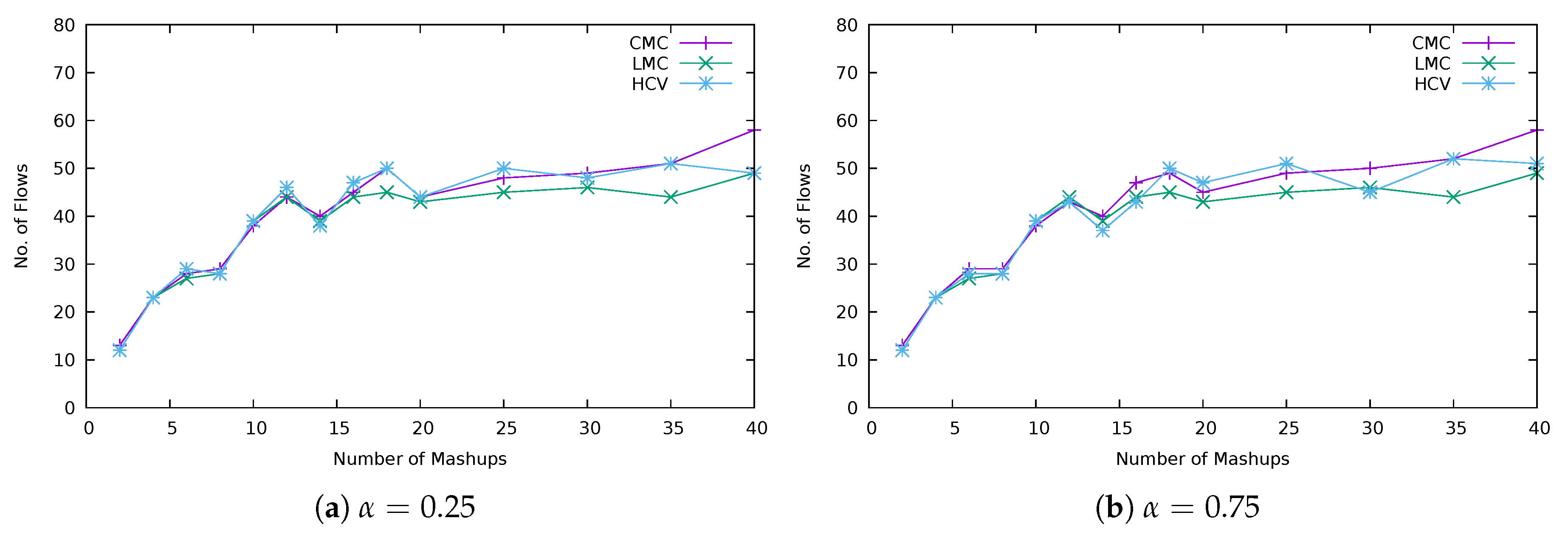
5.2.3. Number of Flows
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fortino, G.; Russo, W.; Savaglio, C.; Viroli, M.; Zhou, M. Modeling Opportunistic IoT Services in Open IoT Ecosystems. In Proceedings of the 18th Workshop “From Objects to Agents”, Calabria, Italy, 15–16 June 2017. [Google Scholar]
- Guinard, D.; Trifa, V. Building the Web of Things; Manning Publications: Shelter Island, NY, USA, 2016. [Google Scholar]
- Perera, C.; Zaslavsky, A.; Christen, P.; Georgakopoulos, D. Sensing as a Service Model for Smart Cities Supported by Internet of Things. Trans. Emerg. Telecommun. Technol. 2014, 25, 81–93. [Google Scholar] [CrossRef]
- Kim, M.; Asthana, M.; Bhargava, S.; Iyyer, K.K.; Tangadpalliwar, R.; Gao, J. Developing an On-Demand Cloud-Based Sensing-as-a-Service System for Internet of Things. J. Comput. Netw. Commun. 2016, 2016, 3292783. [Google Scholar] [CrossRef]
- Duan, Y.; Fu, G.; Zhou, N.; Sun, X.; Narendra, N.C.; Hu, B. Everything as a Service(XaaS) on the Cloud: Origins, Current and Future Trends. In Proceedings of the IEEE 8th International Conference on Cloud Computing, New York, NY, USA, 7 June–2 July 2015. [Google Scholar]
- Misra, S.; Chatterjee, S.; Obaidat, M.S. On Theoretical Modeling of Sensor Cloud: A Paradigm Shift From Wireless Sensor Network. IEEE Syst. J. 2017, 11, 1084–1093. [Google Scholar] [CrossRef]
- Sheng, X.; Tang, J.; Xiao, X.; Xue, G. Sensing as a Service: Challenges, Solutions and Future Directions. IEEE Sens. J. 2013, 13, 3733–3741. [Google Scholar] [CrossRef]
- Pouryazdan, M.; Kantarci, B.; Soyata, T.; Foschini, L.; Song, H. Quantifying User Reputation Scores, Data Trustworthiness, and User Incentives in Mobile Crowd-Sensing. IEEE Access 2017, 5, 1382–1397. [Google Scholar] [CrossRef]
- Madria, S. Sensor Cloud: Sensing-as-Service Paradigm. In Proceedings of the IEEE International Conference on Mobile Data Management, Aalborg, Denmark, 25–28 June 2018. [Google Scholar]
- Al-Fagih, M.A.E.; Al-Turjman, F.M.; Alsalih, W.M.; Hassanein, H.S. Priced Public Sensing Framework for Heterogeneous IoT Architectures. IEEE Trans. Emerg. Top. Comput. 2013, 1, 133–147. [Google Scholar] [CrossRef]
- Petrolo, R.; Loscrì, V.; Mitton, N. Towards a Smart City Based on Cloud of Things, a Survey on the Smart City Vision and Paradigms. Trans. Emerg. Telecommun. Technol. 2017, 28, e2931. [Google Scholar] [CrossRef]
- Misra, S.; Bera, S.; Mondal, A.; Tirkey, R.; Chao, H.; Chattopadhyay, S. Optimal Gateway Selection in Sensor-Cloud Framework for Health Monitoring. IET Wirel. Sens. Syst. 2014, 4, 61–68. [Google Scholar] [CrossRef]
- Hsu, Y.-C.; Lin, C.-H.; Chen, W.-T. Design of a Sensing Service Architecture for Internet of Things with Semantic Sensor Selection. In Proceedings of the International Conference UTC-ATC-ScalCom, Bali, Indonesia, 9–12 December 2014. [Google Scholar]
- Lai, C.-C.; Chao, H.-C.; Lai, Y.; Wan, J. Cloud-Assisted Real-Time Transrating for HTTP Live Streaming. IEEE Wirel. Commun. 2013, 20, 62–70. [Google Scholar]
- Lai, C.-F.; Wang, H.; Chao, H.-C.; Nan, G. A Network and Device Aware QoS Approach for Cloud-Based Mobile Streaming. IEEE Trans. Multimed. 2013, 15, 747–757. [Google Scholar] [CrossRef]
- Wang, W.; Wang, Q.; Sohraby, K. Multimedia Sensing as a Service (MSaaS): Exploring Resource Saving Potentials of at Cloud-Edge IoTs and Fogs. IEEE Internet Things J. 2017, 4, 487–495. [Google Scholar] [CrossRef]
- Xu, Y.; Mao, S. A Survey of Mobile Cloud Computing for Rich Media Applications. IEEE Wirel. Commun. 2013, 20, 46–53. [Google Scholar] [CrossRef]
- Zhu, C.; Li, X.; Ji, H.; Leung, V.C.M. Towards Integration of Wireless Sensor Networks and Cloud Computing. In Proceedings of the International Conference CloudCom, Vancouver, BC, Canada, 30 November–3 December 2015. [Google Scholar]
- Kumar, L.P.D.; Grace, S.S.; Krishnan, A.; Manikandan, V.M.; Chinraj, R.; Sumalat, M.R. Data Filtering in Wireless Sensor Networks using Neural Networks for Storage in Cloud. In Proceedings of the International Conference ICRTIT, Chennai, Tamil Nadu, India, 19–21 April 2012. [Google Scholar]
- Zaslavsky, A.; Perera, C.; Georgakopoulos, D. Sensing as a Service and Big Data. In Proceedings of the International Conference on Advances in Cloud Computing, Bangalore, India, 4–6 July 2012. [Google Scholar]
- Distefano, S.; Merlino, G.; Puliafito, A. Sensing and Actuation as a Service: a New Development for Clouds. In Proceedings of the IEEE 11th International Symposium on Network Computing and Applications, Cambridge, MA, USA, 23–25 August 2012. [Google Scholar]
- Deshwal, A.; Kohli, S.; Chethan, K.P. Information as a Service based Architectural Solution for WSN. In Proceedings of the IEEE International Conference on Communications in China (ICCC ’12), Beijing, China, 15–17 August 2012. [Google Scholar]
- Dinh, T.; Kim, Y. An efficient Sensor-Cloud Interactive Model for On-Demand Latency Requirement Guarantee. In Proceedings of the IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Distefano, S.; Merlino, G.; Puliafito, A. A Utility Paradigm for IoT: The Sensing Cloud. Pervasive Mob. Comput. 2015, 20, 127–144. [Google Scholar] [CrossRef]
- Fortino, G.; Savaglio, C.; Palau, C.E.; de PugaM, J.S.; Ganzha, A.; Paprzycki, M.; Montesinos, M.; Liotta, A.; Llop, M. Towards multi-layer interoperability of heterogeneous IoT platforms: The INTER-IoT approach. In Integration, Interconnection, and Interoperability of IoT Systems; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Ishi, Y.; Kawakami, T.; Yoshihisa, T.; Teranishi, Y.; Nakauchi, K.; Nishinaga, N. Design and Implementation of Sensor Data Sharing Platform for Virtualized Wide Area Sensor Networks. In Proceedings of the International Conference on P2P, Parallel, Grid, Cloud and Internet Computing, Victoria, BC, Canada, 12–14 November 2012. [Google Scholar]
- Casadei, R.; Fortino, G.; Pianini, D.; Russo, W.; Savaglio, C.; Viroli, M. Modelling and simulation of Opportunistic IoT Services with Aggregate Computing. Future Gener. Comput. Syst. 2019, 91, 252–262. [Google Scholar] [CrossRef]
- Compton, M.; Barnaghi, P.; Bermudez, L.; García-Castro, R.; Corcho, O.; Cox, S.; Graybeal, J.; Hauswirth, M.; Henson, C.; Herzog, A.; et al. The SSN Ontology of the W3C Semantic Sensor Network Incubator Group. Web Semant. Sci. Serv. Agents World Wide Web 2012, 17, 25–32. [Google Scholar] [CrossRef]
- Blackstock, M.; Lea, R. IoT mashups with the WoTKit. In Proceedings of the IEEE International Conference on the Internet of Things (IOT), Wuxi, China, 24–26 October 2012. [Google Scholar]
- Barnaghi, P.; Wang, W.; Taylor, C.H.A.K. Semantics for the Internet of Things: Early progress and back to the future. Int. J. Semant. Web Inf. Syst. 2012, 8, 1–21. [Google Scholar] [CrossRef]
- Onat, F.A.; Stojmenovic, I. Generating Random Graphs for Wireless Actuator Networks. In Proceedings of the IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks, Espoo, Finland, 18–21 June 2007. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Functionality pool size | 10 |
| Avg size of property pools | 10 |
| Total number of devices | 100 |
| Device’s properties (from pool) | 50% |
| Avg number of elements per mashup | 10 |
| Mashup element’s properties (from pool) | 50% |
| 0.5 | |
| , | 0.25 or 0.75; |
| 10 | |
| CSP density | 0.25 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerreiro, J.; Rodrigues, L.; Correia, N. Resource Allocation Model for Sensor Clouds under the Sensing as a Service Paradigm. Computers 2019, 8, 18. https://doi.org/10.3390/computers8010018
Guerreiro J, Rodrigues L, Correia N. Resource Allocation Model for Sensor Clouds under the Sensing as a Service Paradigm. Computers. 2019; 8(1):18. https://doi.org/10.3390/computers8010018
Chicago/Turabian StyleGuerreiro, Joel, Luís Rodrigues, and Noélia Correia. 2019. "Resource Allocation Model for Sensor Clouds under the Sensing as a Service Paradigm" Computers 8, no. 1: 18. https://doi.org/10.3390/computers8010018
APA StyleGuerreiro, J., Rodrigues, L., & Correia, N. (2019). Resource Allocation Model for Sensor Clouds under the Sensing as a Service Paradigm. Computers, 8(1), 18. https://doi.org/10.3390/computers8010018