3.3. Packet Delivery Ratio Comparison
The results presented in
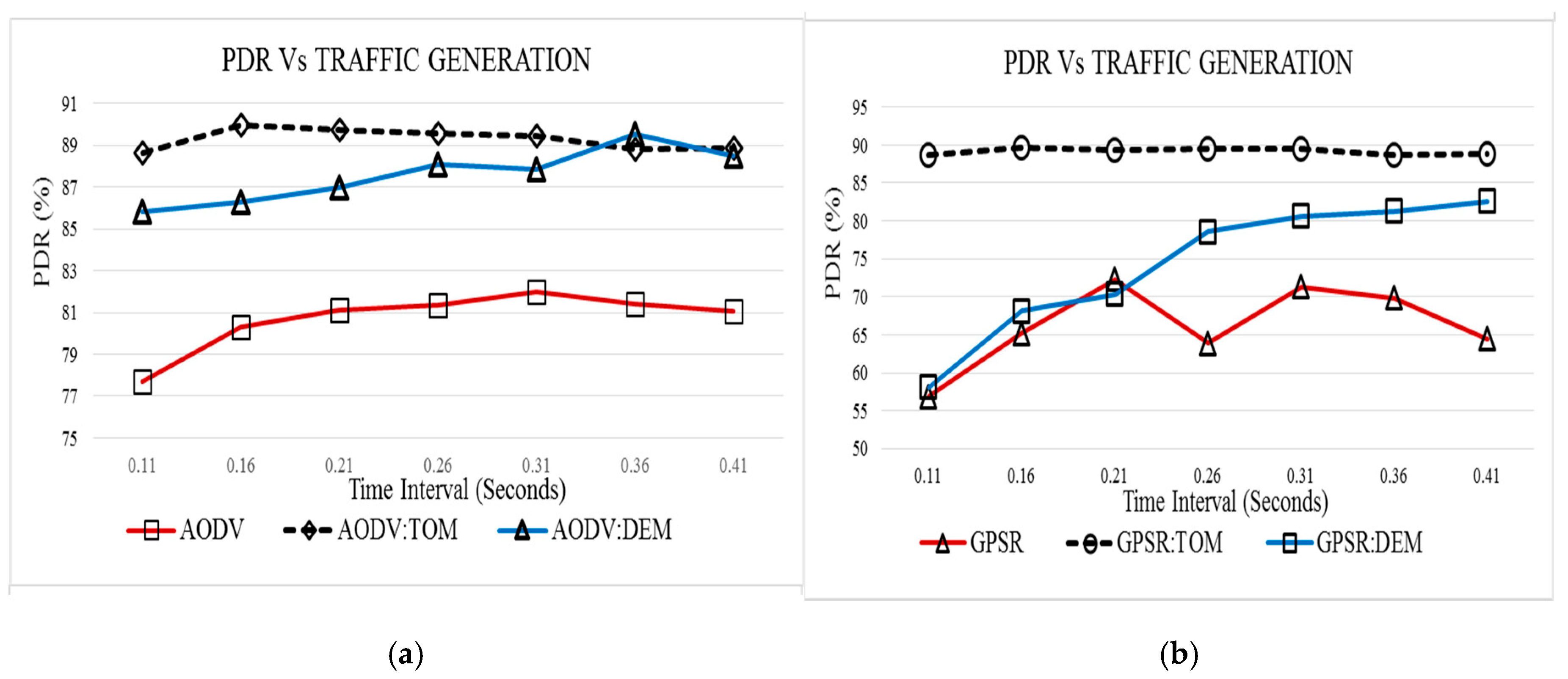
Figure 6 offer a detailed comparison of the packet delivery ratio (PDR) achieved by QOS-AODV, GPSR, CM-QOS-AODV, and CM-GPSR under varying traffic generation rates. As shown in
Figure 6a, both QOS-AODV and GPSR, when configured with the TOM (Throughput Optimized Method) profile, maintain high average PDR values around 89%, indicating strong reliability in packet delivery. In contrast, their baseline counterparts—QOS-AODV and GPSR without any optimization—consistently perform below 83%, showing weaker resilience under dynamic traffic conditions [
15]. A key observation from these results is that both TOM and DEM (the Delay and PDR Enhanced Method) profiles significantly enhance PDR compared to their unoptimized versions, achieving approximately a 10% average improvement. Notably, the TOM profile exhibits outstanding robustness against increasing traffic, maintaining a relatively stable PDR across all traffic generation rates [
16]. This stability suggests that TOM effectively tunes routing parameters to prioritize reliable data transmission, making it particularly suitable for dynamic Vehicular Communication Networks (VCNs) where traffic loads fluctuate frequently. In contrast,
Figure 6b reveals that while the DEM profile also improves upon the baseline, it shows greater sensitivity to increasing traffic loads. For instance, GPSR with the DEM profile experiences a noticeable decline in PDR as traffic generation intensifies. This degradation highlights a core trade-off within DEM’s design: by attempting to balance multiple performance metrics (PDR, throughput, and delay), DEM sacrifices some degree of consistency in any single metric, particularly under stress conditions such as high traffic volumes. Further analysis suggests that TOM’s single-objective optimization—specifically targeting PDR—results in more consistent and reliable packet delivery, particularly in high-traffic environments where communication reliability is critical [
17]. In contrast, DEM’s multi-objective approach, while beneficial in achieving broader performance improvements, results in a less focused optimization for PDR alone. Consequently, although DEM outperforms the baseline protocols, it falls short of the PDR levels achieved by TOM. This comparison between TOM and DEM underscores the strategic value of targeted optimization in vehicular network routing. TOM’s consistent performance under varying conditions highlights its robustness and suitability for delay-sensitive, high-reliability applications. Meanwhile, DEM’s performance variability reinforces the importance of carefully aligning optimization strategies with specific application requirements and network dynamics in VCNs [
17].
TOM’s strong emphasis on PDR makes it particularly well-suited for applications where reliable packet delivery is critical, such as safety-critical systems or real-time data transmissions in Vehicular Communication Networks (VCNs). In contrast, DEM’s trade-offs are more appropriate for scenarios that require a balanced performance across multiple metrics, including throughput and latency, rather than prioritizing packet delivery alone. The results suggest that TOM is the preferred choice for high-throughput, delay-sensitive applications where maintaining high PDR is non-negotiable [
18]. Conversely, DEM may be better suited for networks with more flexible PDR requirements but a stronger need to balance overall network efficiency and delay constraints. In conclusion, the findings from
Figure 6 clearly illustrate the superior performance of the TOM profile in optimizing PDR for both QOS-AODV and GPSR protocols. TOM consistently outperforms DEM and the baseline configurations, maintaining stable and high PDR even under fluctuating traffic conditions. Although DEM improves upon the unoptimized protocols, its performance is more vulnerable to increased traffic, particularly in the case of GPSR [
19]. These observations reinforce the importance of aligning protocol optimization strategies with the specific performance priorities of the network environment, whether the goal is maximizing reliability (PDR), minimizing latency, improving throughput, or achieving a balanced trade-off. Moreover, the insights gained from this study contribute to the broader understanding of control parameter tuning in wireless networks, with promising implications for enhancing the reliability and efficiency of urban vehicular communication systems [
20].
3.5. Comparison Between the Average Throughputs for PDR and Delay Obtained Against Traffic Generations and Packet Sizes
The throughput comparison in
Figure 8 shows that QOS-AODV-TOM and GPSR-TOM achieve the highest throughput under all traffic generation intervals, outperforming their respective baseline protocols (QOS-AODV and GPSR). QOS-AODV-TOM consistently performs above 0.40 Mbps, while GPSR-TOM surpasses 0.47 Mbps at higher traffic loads. This demonstrates the efficiency of TOM profiles in optimizing network parameters for better data transmission performance. TOM’s optimization focus on throughput helps maintain a steady flow of data even as traffic increases, minimizing packet loss and network congestion. QOS-AODV-DEM and GPSR-DEM, though improved compared to their baseline versions, still show a slight decrease in throughput compared to TOM profiles. This is likely due to DEM’s consideration of multiple factors (PDR, delay, and throughput), which may slightly compromise the throughput to improve overall performance balance. In comparison with the recent literature, throughput optimization techniques like TOM show considerable advancements in routing protocol efficiency for Vehicular Communication Networks (VCNs). Studies, such as those by Ref. [
21], emphasize the importance of throughput in VCNs due to the high mobility and dynamic topology of nodes. Protocols that emphasize throughput, like TOM, are highly desirable for real-time applications like collision avoidance and traffic management. The improvements seen with TOM profiles align with the trends observed in hybrid protocols like those discussed by Ref. [
22], where hybrid routing techniques were employed to maintain high data rates in challenging VANET environments. The results here reinforce that optimized profiles significantly enhance throughput without compromising other performance metrics.
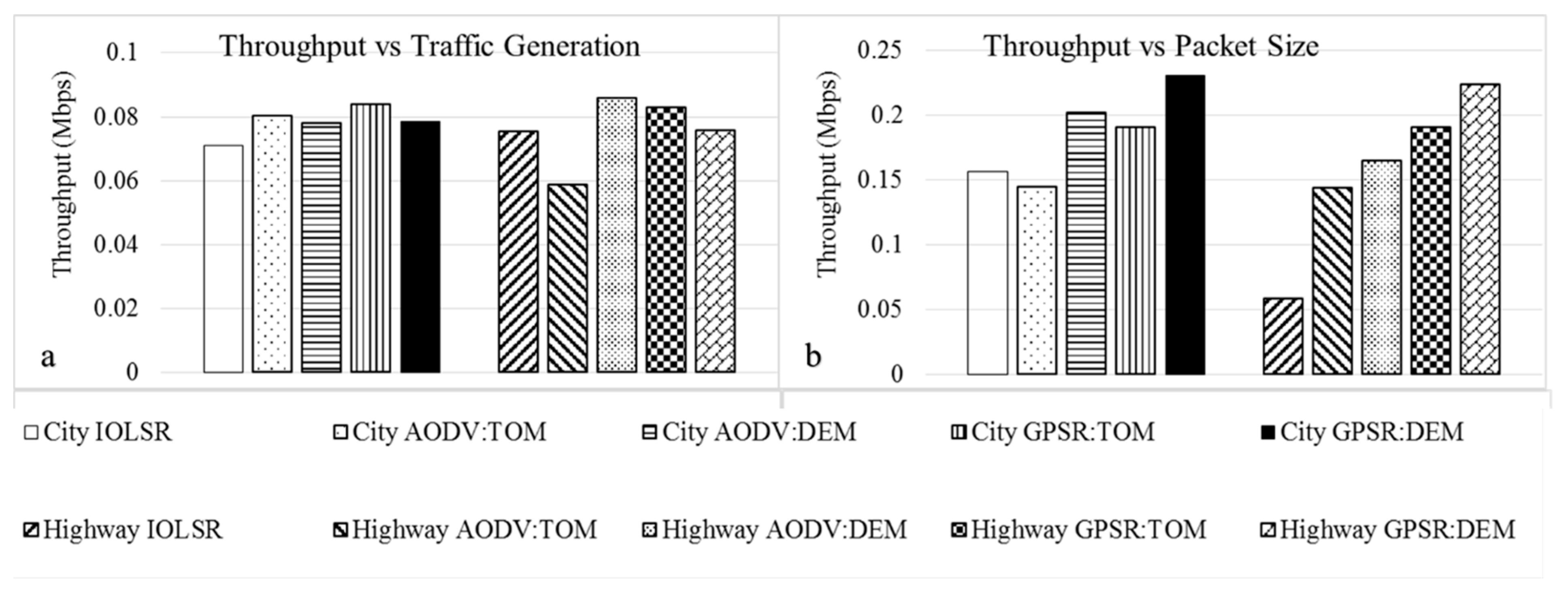
As mentioned above,
Figure 9 presents a comprehensive comparison of the average throughputs observed in three different protocols: CM-QOS-AODV, CM-QOS-AODV, and IOLSR in both city and highway scenarios. Throughput is a key performance metric that indicates how effectively a network protocol delivers data over a communication channel by comparing the performance of these protocols in various conditions, such as traffic generation and packet size. In terms of traffic generation, all three protocols, CM-QOS-AODV, CM-QOS-AODV, and IOLSR, show relatively consistent performance, with their throughputs ranging between 0.06 and 0.08 Mbps. This narrow range suggests that the protocols exhibit similar efficiency in handling traffic under varying load conditions, regardless of the city or highway environment. Such close throughput values imply that none of the protocols have a distinct advantage over the others when subjected to moderate traffic conditions. However, the observation that the throughput values for all protocols remain within a relatively narrow range may be attributed to the overall low traffic conditions or the balanced distribution of network load across protocols during the evaluation. To further assess the scalability and robustness of these protocols, future work should incorporate high-traffic scenarios or targeted stress tests to evaluate performance under more demanding network conditions. When analyzing the impact of varying packet sizes, the protocols generally exhibit throughput values ranging between 0.15 and 0.25 Mbps, with the notable exception of IOLSR in the highway scenario, where throughput significantly declines. This decline underscores the limitations of proactive routing protocols like IOLSR in dynamic and rapidly changing environments, such as highways [
21]. Proactive protocols continuously update routing tables to maintain a complete view of the network topology, which introduces substantial overhead. In high-mobility scenarios, this overhead becomes increasingly burdensome due to frequent topology changes caused by fast-moving vehicles, resulting in degraded throughput performance. In contrast, reactive protocols such as CM-QOS-AODV demonstrate greater adaptability in such environments. Rather than maintaining constant routing information, these protocols discover routes only when needed, minimizing unnecessary overhead and better coping with dynamic topology shifts [
22]. This on-demand nature makes reactive protocols particularly suitable for high-mobility vehicular scenarios, where rapid adaptability and reduced control message overhead are essential for maintaining reliable communication.
Figure 9 provides an in-depth comparison of the packet delivery ratio (PDR) for the routing protocols CM-QOS-AODV, CM-GPSR, and IOLSR in city and highway environments across different design metrics, such as traffic generation and packet sizes. The PDR is a critical performance metric in network protocols, representing the percentage of data packets successfully delivered to the destination relative to the number of packets sent. A higher PDR indicates a more reliable network protocol in ensuring data is transmitted successfully despite network challenges. CM-QOS-AODV vs. CM-QOS-AODV:
Figure 8a reveals that CM-QOS-AODV performed better in highway environments than in the city, except when subjected to varying traffic generation. This finding indicates that CM-QOS-AODV, which is likely a time-based optimized version of QOS-AODV, is more suited to dynamic and high-mobility environments like highways. This could be due to its reactive nature, where routes are discovered and maintained only when required, making it agile in responding to frequent topology changes that occur in high-mobility scenarios such as highways. However, the performance of CM-QOS-AODV in city environments, though slightly lower than on highways, remains commendable and may still be effective in lower-mobility scenarios with stable network links. On the other hand, CM-QOS-AODV shows only a small difference in average PDR between city and highway scenarios, suggesting that it handles both environments with relatively similar efficiency. This consistency could be due to its underlying design, which might focus on balancing performance across varied network conditions. The stable performance in both environments indicates that CM-QOS-AODV is versatile, making it suitable for applications that need to function reliably in both urban and highway conditions without significant protocol modifications. CM-GPSR: The CM-GPSR protocol stands out by consistently achieving a PDR above 90% across all scenarios, including both city and highway environments. This impressive performance highlights CM-GPSR ‘s capability to effectively route packets in both environments, which can be attributed to the geographical positioning system (GPSR) nature of the protocol, which is optimized for time-based metrics. Its reliance on location-based routing enables it to quickly identify the best routes in a dynamically changing network, such as highways, while still maintaining high PDR in less dynamic city networks. The performance follows a similar trend, although it is more efficient in the highway environment than in the city. The highway’s less dense network and fewer obstacles might allow CM-GPSR to better exploit its location-based routing, leading to more efficient packet forwarding and higher PDR. In contrast, the city’s more congested network topology could introduce more interference, leading to slightly reduced performance. IOLSR Performance: The IOLSR protocol, which follows a proactive routing approach, managed to achieve an average PDR above 80% in city environments for all scenarios except for high-mobility conditions. This indicates that IOLSR functions effectively when the network topology is relatively stable, as in a typical city scenario with moderate or low mobility. However, as mobility increases, the protocol’s performance degrades, which is expected because IOLSR maintains routes continuously, and frequent changes in topology (due to mobility) require constant updates, leading to increased overhead and potential delays in routing adjustments. In highway environments, IOLSR performs slightly better than in the city, managing to achieve more than 80% PDR across all scenarios, including high-mobility situations. This somewhat improved performance in highways can be attributed to the lower density of nodes, which reduces the frequency of route updates. Although IOLSR maintains routes proactively, the reduced complexity in highway environments might alleviate some of the burdens typically associated with proactive routing, allowing it to maintain reasonably high PDR. Comparative Analysis: In comparing all the protocols across different scenarios, CM-QOS-AODV and CM-GPSR consistently outperformed IOLSR across all scenarios. This result highlights the superior adaptability of reactive and geographical routing protocols in diverse environments. CM-QOS-AODV variants (both TOM and DEM) demonstrate strong performance in handling dynamic network conditions, especially in highways, where reactive protocols excel in managing frequent route changes without the overhead of maintaining continuous route tables. Similarly, CM-GPSR’s reliance on location-based information allows it to maintain highly efficient routing in both city and highway environments, making it one of the top-performing protocols in terms of PDR. Interestingly, IOLSR does outperform CM-GPSR in terms of PDR, which suggests that IOLSR can still be a competitive choice under certain conditions. The proactive nature of IOLSR gives it an advantage in situations where maintaining continuous routes is beneficial, particularly in environments with less mobility and fewer topological changes. However, as the environment becomes more dynamic (as in high-mobility scenarios), IOLSR’s performance drops compared to the reactive and geographical protocols. The analysis of
Figure 9 reveals clear distinctions between the routing protocols in terms of their PDR in both city and highway environments. CM-QOS-AODV, CM-QOS-AODV, and CM-GPSR consistently show superior performance, especially in dynamic environments like highways, where their adaptability allows them to handle frequent route changes effectively. IOLSR, while maintaining a reasonable PDR, struggles in high-mobility scenarios due to its proactive nature, though it still performs well in more stable environments. The overall conclusion from these observations is that reactive and geographically optimized protocols are better suited for networks with high mobility, while proactive protocols like IOLSR may still hold an advantage in environments where network topology remains relatively constant.
Figure 10 offers a detailed comparison of the average delays observed for the CM-QOS-AODV, CM-GPSR, and IOLSR protocols across different scenarios, such as traffic generation, packet sizes, pause times, and mobility. Delay is a crucial performance metric in networking, referring to the time taken for a packet to travel from the source to the destination. Lower delays are generally preferred, as they indicate faster communication within the network. The IOLSR protocol consistently achieves the lowest delay across all scenarios, a result that can be attributed to its proactive routing behavior. In IOLSR, routes are continuously maintained and updated, ensuring that there is no need to search for a new route when packets are ready for transmission. This allows for immediate packet forwarding, reducing delay. The proactive nature of IOLSR is especially effective in environments with low mobility, where the network topology remains relatively stable. This protocol’s ability to maintain pre-established routes allows it to quickly adapt to network conditions, thereby minimizing latency even in high-traffic situations up to 95% in the worst-case scenario. The highest observed average delay for IOLSR is 0.06 s, which was observed in the mobility comparison scenario. This relatively low delay, even in high-mobility situations, underscores the protocol’s robustness. However, the slight increase in delay in mobility scenarios indicates that even proactive routing protocols are affected by frequent topology changes, although less so than reactive protocols. CM-QOS-AODV performance among the CM profiles: CM-QOS-AODV demonstrates superior performance in reducing delays in high-mobility scenarios. This outcome reflects the advantages of reactive routing protocols like CM-QOS-AODV in dynamically changing environments such as highways. In reactive protocols, routes are discovered only when needed, which allows for greater flexibility in high-mobility scenarios where network topology frequently changes. In such environments, CM-QOS-AODV can adapt more efficiently, establishing new routes quickly after route breaks, thereby keeping delays lower compared to other protocols. However, CM-QOS-AODV has the highest delay in traffic generation scenarios, which suggests that the protocol struggles when the network experiences heavy traffic loads. The reason could be the overhead associated with route discovery in reactive protocols, which causes delays when the demand for route establishment increases. CM-GPSR’s delay behavior exhibits the highest delay for varying packet sizes and pause times, indicating that its performance is less efficient when dealing with changes in these network parameters. The GPSR protocol relies on the geographic location of nodes for routing decisions. While this approach can be efficient in many cases, it may not handle packet size variations well, leading to higher delays when the network conditions change significantly. For example, when the packet size increases or nodes experience extended pauses, CM-GPSR struggles to maintain optimal performance, resulting in higher delays compared to other protocols. In contrast, CM-GPSR performs better in mobility scenarios, maintaining delay variations within a small range between city and highway environments. This outcome suggests that the location-based nature of GPSR makes it more resilient to changes in node mobility, allowing it to maintain stable performance across varying mobility conditions. CM-QOS-AODV’s balanced delay performance maintains its delay observations between 0.03 and 0.04 s across all scenarios, indicating a balanced and consistent performance. This time-optimized version of QOS-AODV performs well across different network conditions, balancing the need for route discovery with minimizing delay. The uniformity in its performance suggests that CM-QOS-AODV handles dynamic and static network conditions similarly, making it a reliable choice for environments that experience a mix of traffic patterns, packet sizes, and mobility levels. Traffic Generation and Delay: One of the key observations is that the average delay for all compared protocols varies below 0.01 s against different traffic generation scenarios. This outcome indicates that traffic generation does not significantly impact the delay performance of the protocols. It suggests that all protocols, regardless of their reactive or proactive nature, are well-equipped to handle varying amounts of network traffic without introducing significant delays. The efficiency in handling traffic generation can be a result of optimized packet queuing and routing mechanisms, which prevent excessive delays even when the network is experiencing heavy traffic. Mobility and Delay: The mobility comparison in
Figure 10a highlights the significant effect of mobility on network delay. Based on the current results, in the worst case, when mobility increases, the network topology changes more frequently, leading to higher chances of route failures and the need for repeated route rediscovery. CM-QOS-AODV, being a reactive protocol, is better equipped to handle these dynamic changes, as it initiates route discovery only when necessary. IOLSR, despite its proactive nature, also performs relatively well but exhibits slight increases in delay under high-mobility conditions, as maintaining up-to-date routes becomes more challenging with frequent topology changes. The analysis of
Figure 10 highlights the distinct delay characteristics of the evaluated routing protocols under various network conditions. IOLSR, leveraging its proactive routing mechanism, consistently achieves the lowest delay, making it well-suited for low-mobility environments with stable topologies. In contrast, CM-QOS-AODV exhibits strong performance in dynamic, high-mobility scenarios, benefiting from its reactive routing design that adapts effectively to frequent topology changes. CM-GPSR shows mixed results—while it handles mobility well due to its geographic routing approach, it struggles with variations in packet size and pause times. Notably, CM-QOS-AODV maintains consistent delay performance across all tested scenarios, indicating its robustness and adaptability to diverse traffic patterns and mobility levels. Overall, protocol selection should align with the specific network context: IOLSR for stable, low-mobility networks; CM-QOS-AODV for highly dynamic environments; and CM-GPSR for cases where geographic awareness enhances routing efficiency.
The PDR comparison presented in
Table 7 and
Table 8 demonstrate that the TOM-optimized profiles (QOS-AODV-TOM and GPSR-TOM) consistently achieved the highest packet delivery ratios, maintaining values around 89% across varying traffic generation rates. This stability underscores TOM’s effectiveness in adapting to changing network conditions without compromising delivery reliability. In contrast, the baseline QOS-AODV and GPSR protocols show a noticeable decline in PDR, dropping below 83% as traffic intensity increases. While the DEM profiles offer a clear improvement over their respective baselines, they still fall short of the high reliability achieved by TOM. This is primarily due to DEM’s multi-metric focus, which balances throughput, delay, and PDR, leading to only modest gains in delivery performance. These findings are consistent with recent studies, such as Ref. [
22], which emphasize the benefits of targeted optimization strategies in improving PDR under dynamic VANET conditions, where protocols optimized for PDR, such as TOM, show superior performance in dynamic environments like VCNs. Based on the current results, with packet loss conditions, TOM’s optimization focus on throughput helps maintain a steady flow of data even as traffic increases, thereby minimizing packet loss and reducing network congestion. The ability of TOM profiles to maintain high PDR even with fluctuating traffic generation makes it a favorable choice for environments with high variability in node mobility and data flow. Furthermore, the DEM profiles’ slightly reduced PDR due to balancing with other metric findings in research on robust parameter optimization protocols, as seen in Ref. [
28].
In
Table 9, the average delay results indicate that GPSR-TOM achieves the lowest delay across all traffic generations, with an average of 0.01 s. QOS-AODV-TOM follows closely, maintaining delays below 0.025 s. The consistently low delay achieved by TOM profiles highlights their efficiency in reducing packet transmission time, making them highly suitable for delay-sensitive applications. In contrast, GPSR and GPSR-DEM show a proportional increase in delay with higher traffic generation, likely due to congestion and routing inefficiencies under higher network load. QOS-AODV demonstrates an inverse relationship with traffic generation, showing slightly improved delay performance as traffic increases, although it still lags behind TOM profiles. The performance of TOM in minimizing delay aligns with findings in the recent literature on low-latency routing protocols in VCNs. Studies like those by Ref. [
29] demonstrate that optimizing for delay in highly dynamic environments can significantly improve real-time data transmission, especially in scenarios requiring rapid response times, such as vehicular safety applications. The low delay observed in TOM profiles makes it comparable to other optimized protocols like QoS-Aware Multipath Routing (QAMR) mentioned by Ref. [
30], which also focuses on reducing latency in the worst-case scenario up to 95%. DEM’s moderate performance in delay is a result of its balancing approach, which, while improving over the baseline protocols, cannot achieve the same low delays as TOM due to its multi-parameter optimization strategy.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}