


A Review of Vessel Time of Arrival Prediction on Waterway Networks: Current Trends, Open Issues, and Future Directions


Abstract
1. Introduction
- (i)
- It is one of the initial efforts to specifically focus on vessel ETA, including estimated time of arrival, travel time, and time of arrival. This study does not focus solely on a single aspect of relevant methods, such as machine learning. Instead, it provides a comprehensive analysis of several approaches by presenting a taxonomy. Additionally, this study offers comparative data on methodologies, evaluation metrics, etc.
- (ii)
- This review highlights various factors that influence ETA models and the different performance metrics used to evaluate them.
- (iii)
- This research also summarizes the open issues with existing vessel ETA prediction models.
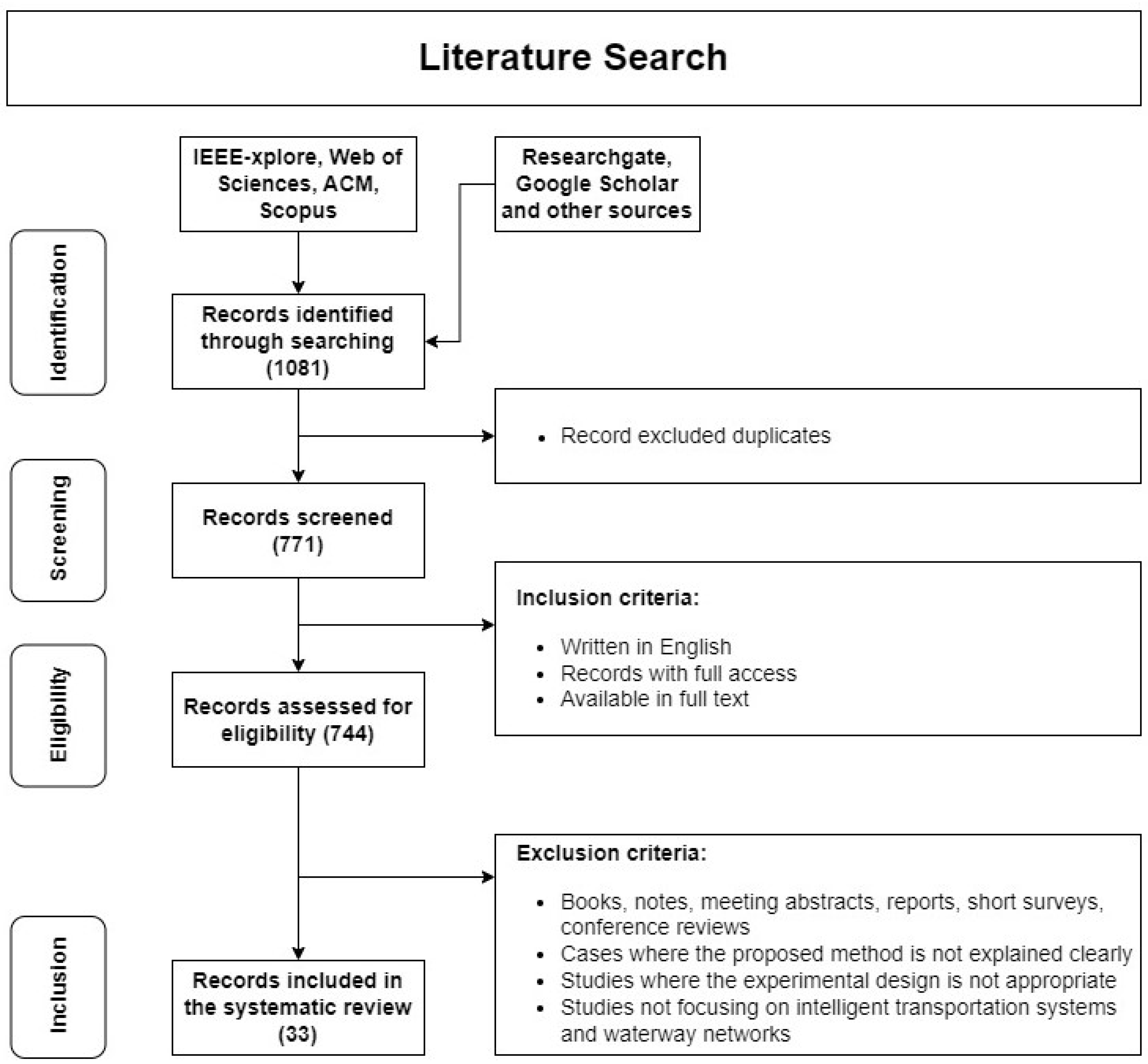
2. Research Methodology
2.1. Research Questions
- RQ1. What methodologies are currently employed for predicting ETA on waterways?
- RQ2. Which are the evaluation metrics and factors for ETA modeling in waterway transportation?
- RQ3. What are the open issues related to ETA prediction modeling?
- RQ4. Which research opportunities can be emphasized for future investigation?
2.2. Search Query String
2.3. Study Selection and Quality Assessment
- Does the research provide a concise and explicit statement outlining its goals, purposes, challenges, objectives, and questions?
- Is the proposed methodology for ETA on waterway networks adequately explained?
- Is the experimental design suitable?
2.4. Data Collection and Synthesis
- Long-Range Identification and Tracking (LRIT);
- Global Positioning System (GPS);
- Multi-Layer Perceptron (MLP) and Artificial Neural Network (ANN);
- Deep Neural Network (DNN);
- One-Dimensional Convolutional Neural Network (1D-CNN);
- Recurrent Neural Network (RNN);
- Long Short-Term Memory (LSTM);
- Bidirectional Long Short-Term Memory (BiLSTM);
- Gated Recurrent Unit (GRU);
- Random Forest (RF) and Classification Tree (CT);
- Classification and Regression Tree (CART);
- Gradient Boosting Decision Trees (GBDTs);
- eXtreme Gradient Boosting (XGBoost);
- Bayesian Linear Regression (BLR) and Ridge Regression (RR);
- Fuzzy Rule-Based Bayesian Network (FRBBN);
- Squeeze-and-Excitation ResNeXt (SE-ResNext);
- Variable Coefficient Inference Network (VCIN);
- Support Vector Regression (SVR);
- K-Nearest Neighbors (KNN) and Kalman Filter (KF);
- Absolute Percentage Error (APE) and Mean Absolute Error (MAE);
- Mean Squared Error (MSE) and Perplexity Score (PS);
- Root Mean Squared Error (RMSE)
- R-squared (R2) and Mean Absolute Deviation (MAD);
- Mean Relative Error (MRE);
- Mean Absolute Percentage Error (MAPE);
- Maritime Mobile Service Identity (MMSI);
- Application Programming Interface (API);
- Port Management Information System (PORT-MIS);
- Terminal Operating System (TOS);
- Actual Time of Arrival (ATA);
- Actual Time of Departure (ATD);
- Estimated Time of Departure (ETD).
3. Analysis and Discussion
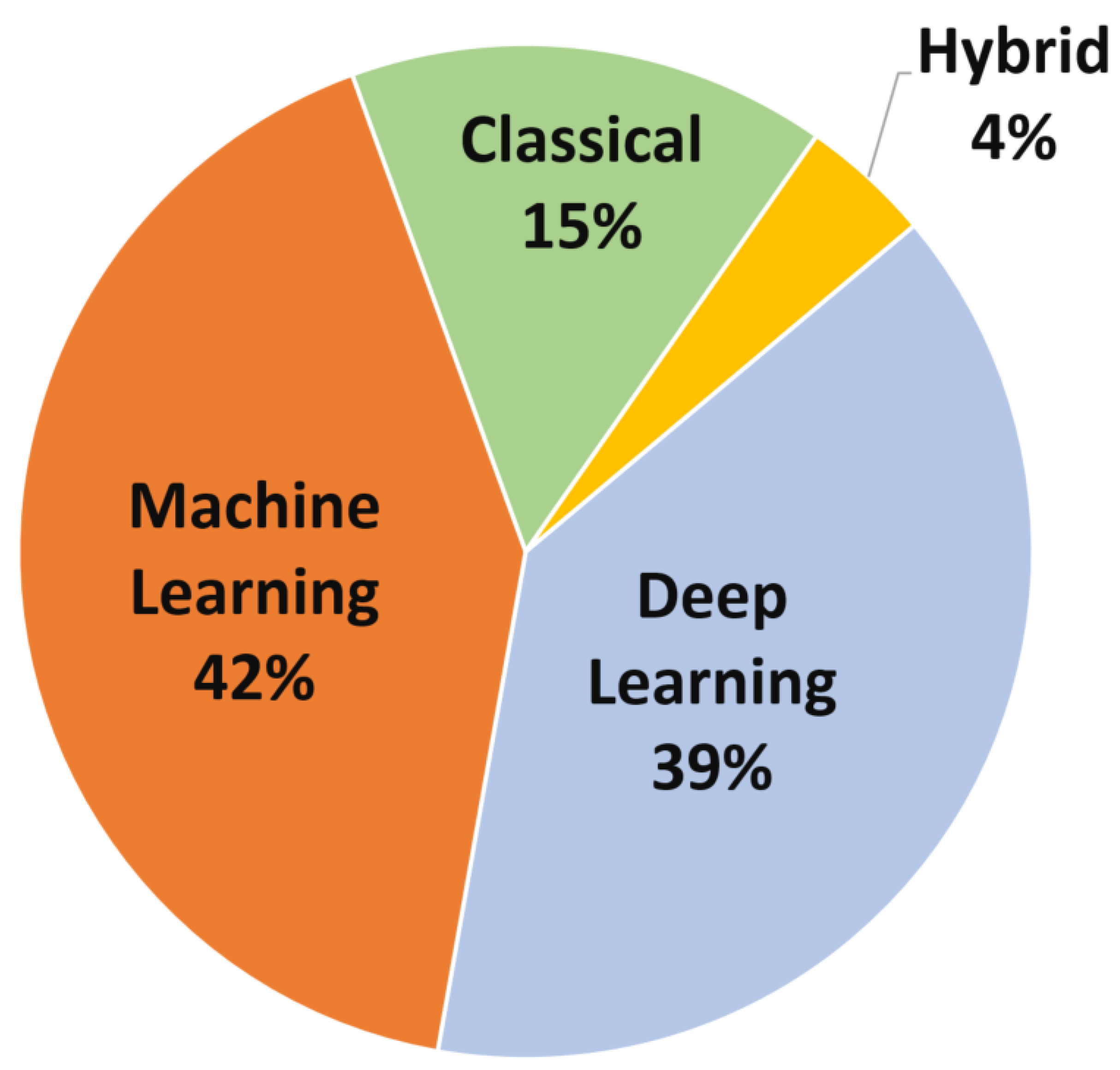
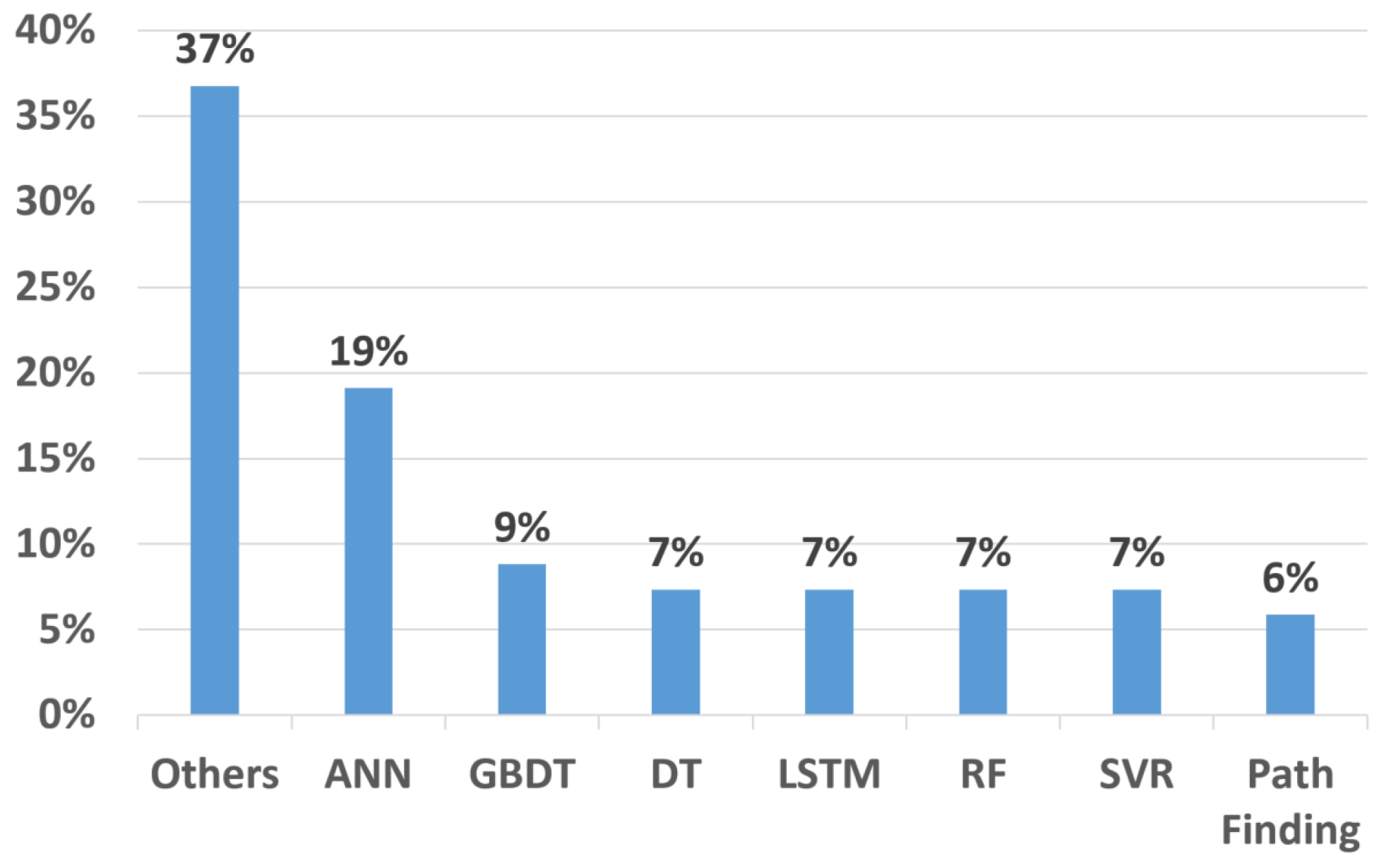
3.1. Taxonomy of the ETA Methods
3.1.1. Classical Methods
3.1.2. Shallow Machine Learning-Based Methods
3.1.3. Deep Learning-Based Methods
3.1.4. Hybrid Methods
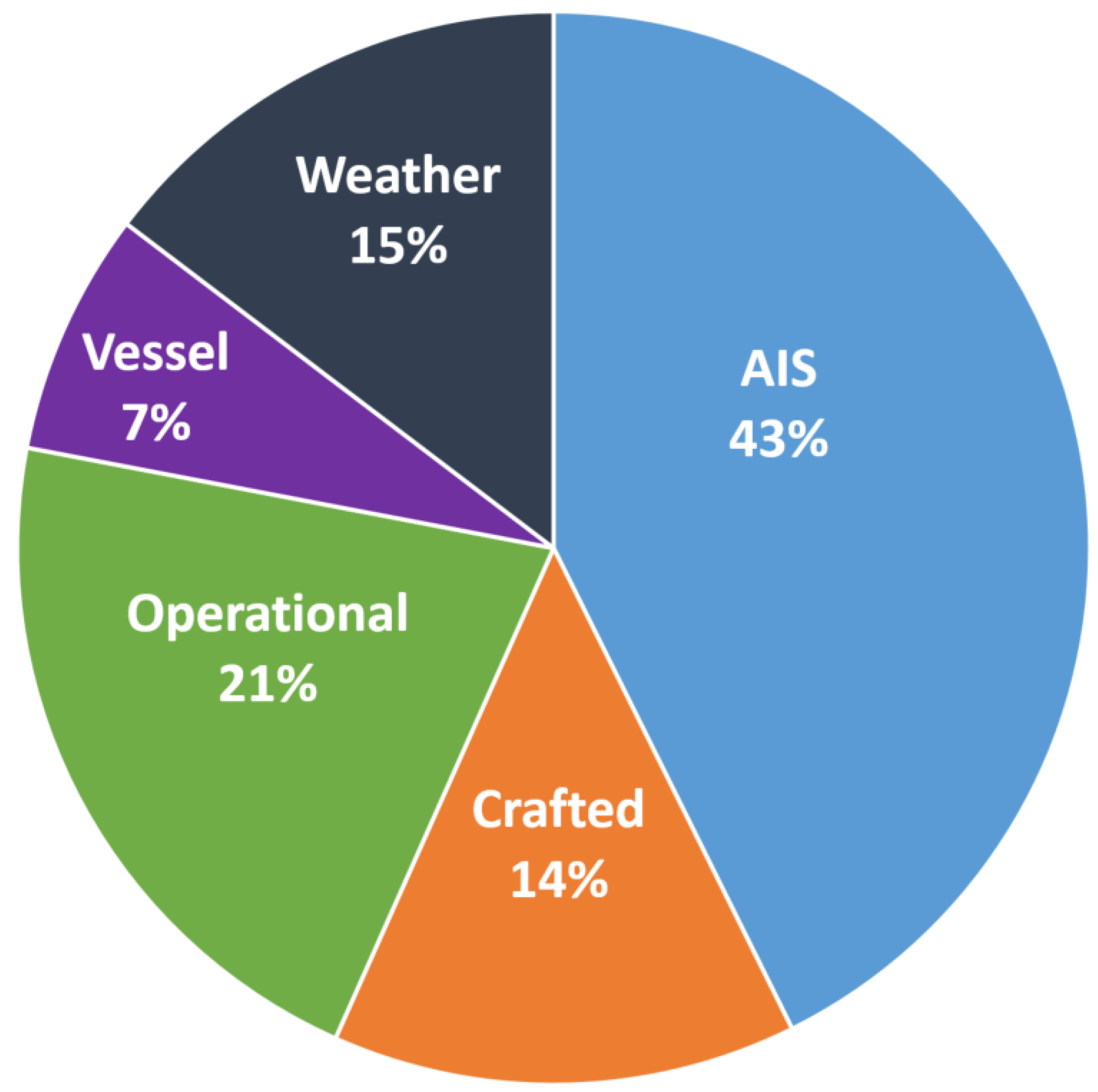
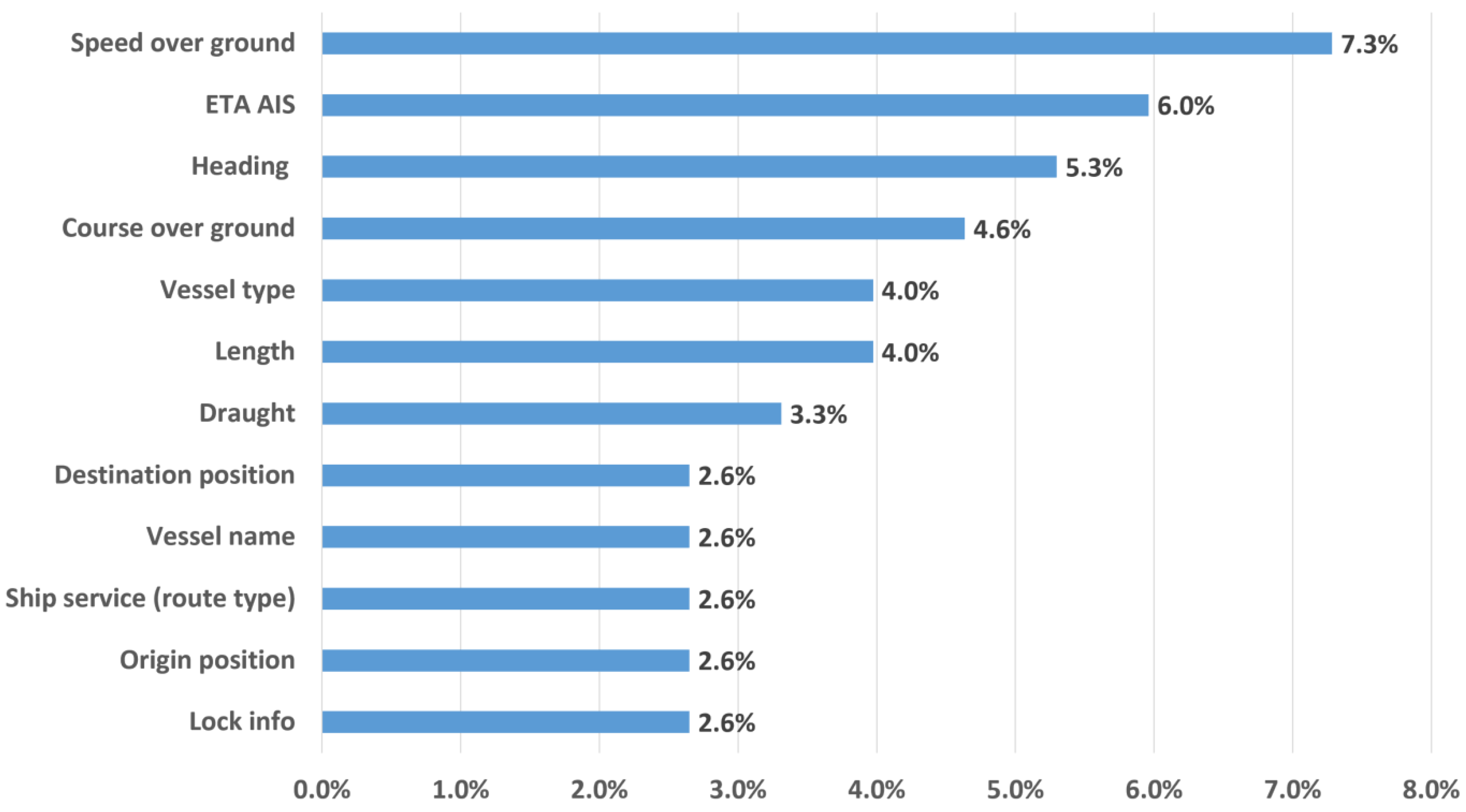
3.2. Factors Affecting ETA
3.2.1. AIS Factors
3.2.2. Vessel Factors
3.2.3. Weather Factors
3.2.4. Crafted Factors
3.2.5. Operational Factors
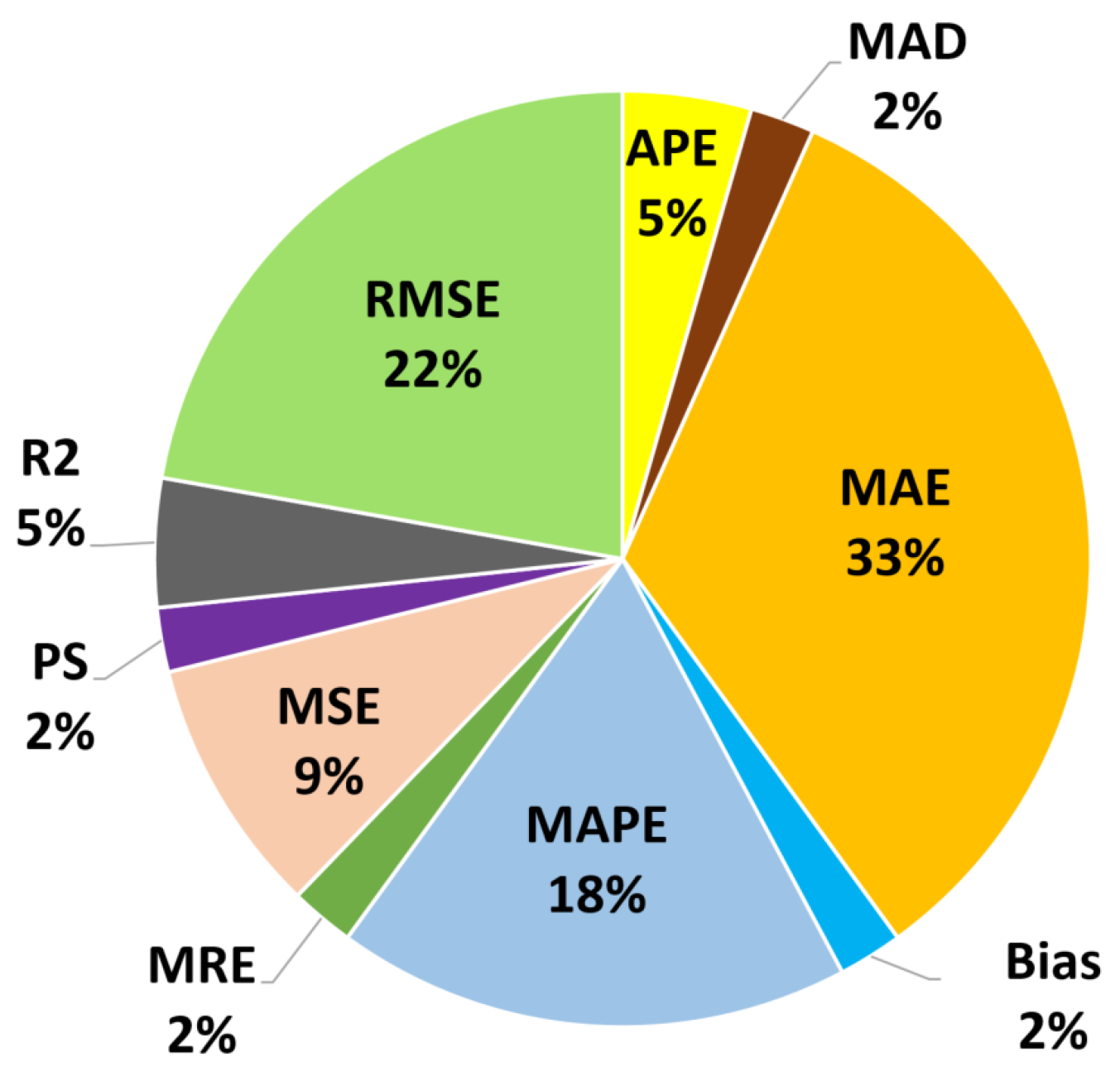
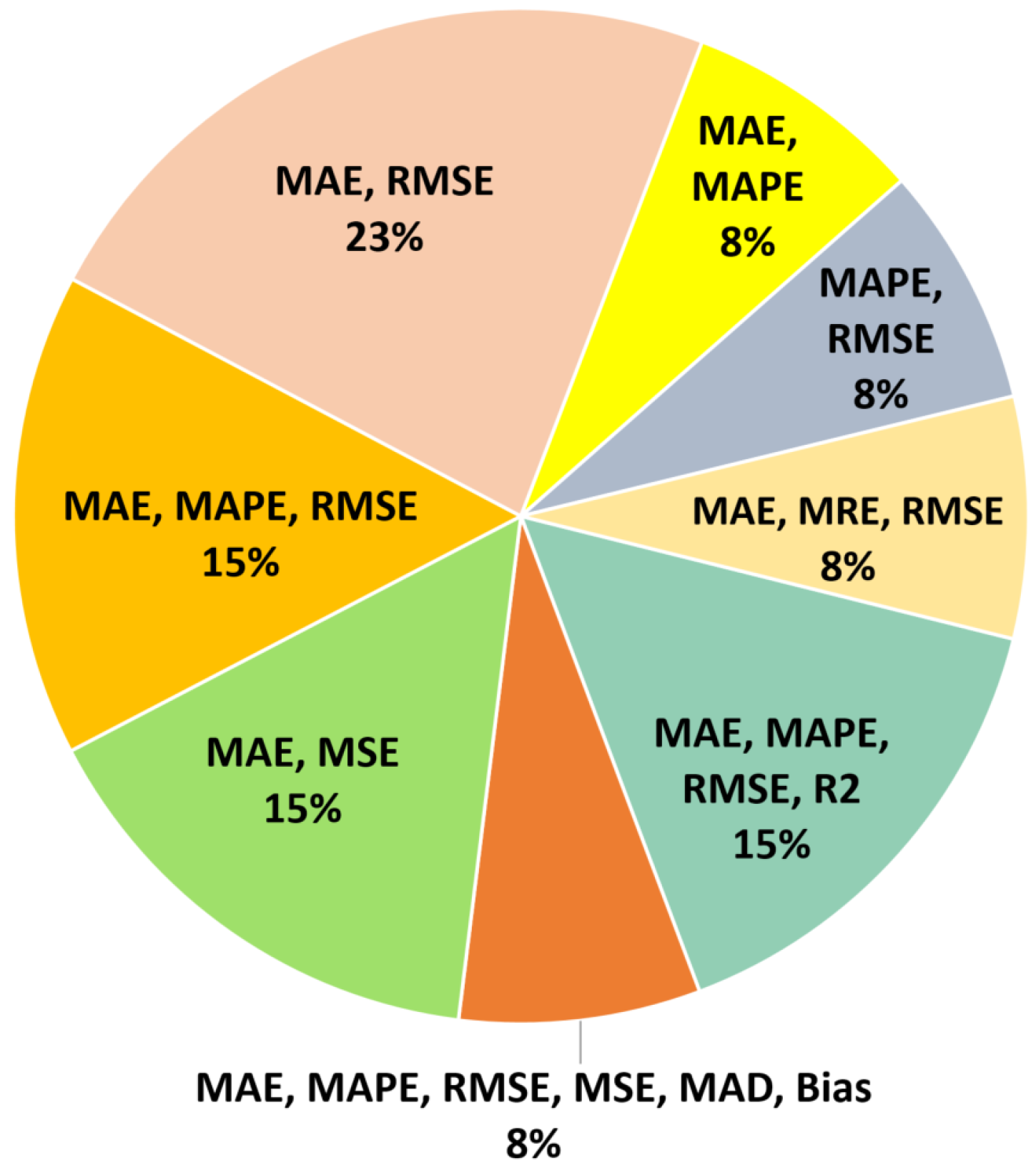
3.3. Evaluating ETA Methods
4. Open Issues
4.1. Method-Related Issues
4.1.1. Classical Methods
4.1.2. Shallow Machine Learning Methods
4.1.3. Deep Learning Methods
4.1.4. Hybrid Methods
4.2. Prediction-Related Issues
5. Conclusions and Future Work
5.1. Methods
5.2. Integrating Factors
5.3. Handling Data Anomalies
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- UNCTAD. Review of Maritime Transport 2017; UNCTAD: Geneva, Switzerland, 2017. [Google Scholar]
- Dobrkovic, A.; Liu, L.; Iacob, M.E.; van Hillegersberg, J. Intelligence amplification framework for enhancing scheduling processes. In Proceedings of the Advances in Artificial Intelligence-IBERAMIA, San Jose, Costa Rica, 23–25 November 2016; pp. 89–100. [Google Scholar] [CrossRef]
- Salido, M.A.; Rodriguez-Molins, M.; Barber, F. A decision support system for managing combinatorial problems in container terminals. Knowl.-Based Syst. 2012, 29, 63–74. [Google Scholar] [CrossRef]
- Rocha de Paula, M.; Boland, N.; Ernst, A.T.; Mendes, A.; Savelsbergh, M. Throughput optimisation in a coal export system with multiple terminals and shared resources. Comput. Ind. Eng. 2019, 134, 37–51. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Yang, B.; Wang, N. Vessel traffic scheduling optimization for restricted channel in ports. Comput. Ind. Eng. 2021, 152, 107014. [Google Scholar] [CrossRef]
- Kitchenham, B.; Charters, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering; Technical Report EBSE 2007-001. Keele University and Durham University Joint Report; UK, 2007. Available online: https://edisciplinas.usp.br/pluginfile.php/4108896/mod_resource/content/2/slrPCS5012_highlighted.pdf (accessed on 2 June 2024).
- Snyder, H. Literature review as a research methodology: An overview and guidelines. J. Bus. Res. 2019, 104, 333–339. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef] [PubMed]
- Alessandrini, A.; Mazzarella, F.; Vespe, M. Estimated time of arrival using historical vessel tracking data. IEEE Trans. Intell. Transp. Syst. 2019, 20, 7–15. [Google Scholar] [CrossRef]
- Bodunov, O.; Schmidt, F.; Martin, A.; Brito, A.; Fetzer, C. Real-time destination and ETA prediction for maritime traffic. In Proceedings of the DEBS 2018—12th ACM International Conference on Distributed and Event-Based Systems, Hamilton, New Zealand, 25–29 June 2018. [Google Scholar] [CrossRef]
- Bachar, M.; Elimelech, G.; Gat, I.; Sobol, G.; Rivetti, N.; Gal, A. Venilia, Online learning and prediction of vessel destination. In Proceedings of the DEBS 2018—12th ACM International Conference on Distributed and Event-Based Systems, Hamilton, New Zealand, 25–29 June 2018. [Google Scholar] [CrossRef]
- Bourzak, I.; Mekkaoui, S.E.; Berrado, A.; Caron, S.; Benabbou, L. Deep learning approaches for vessel estimated time of arrival prediction: A case study on the Saint Lawrence river. In Proceedings of the 2023 14th International Conference on Intelligent Systems: Theories and Applications (SITA), Casablanca, Morocco, 22–23 November 2023. [Google Scholar] [CrossRef]
- Chu, Z.; Yan, R.; Wang, S. Evaluation and prediction of punctuality of vessel arrival at port: A case study of Hong Kong. Marit. Policy Manag. 2024, 51, 1096–1124. [Google Scholar] [CrossRef]
- Mekkaoui, S.E.; Benabbou, L.; Berrado, A. Predicting ships estimated time of arrival based on AIS data. In Proceedings of the SITA’20: Proceedings of the 13th International Conference on Intelligent Systems: Theories and Applications, Rabat, Morocco, 23–24 September 2020. [CrossRef]
- Mekkaoui, S.E.; Benabbou, L.; Berrado, A. Machine learning models for efficient port terminal operations: Case of vessels’ arrival times prediction. IFAC-PapersOnLine 2022, 55, 3172–3177. [Google Scholar] [CrossRef]
- Mekkaoui, S.E.; Benabbou, L.; Berrado, A. Deep learning models for vessel’s ETA prediction: Bulk ports perspective. Flex. Serv. Manuf. J. 2023, 35, 5–28. [Google Scholar] [CrossRef]
- Fancello, G.; Pani, C.; Pisano, M.; Serra, P.; Zuddas, P.; Fadda, P. Prediction of arrival times and human resources allocation for container terminal. Marit. Econ. Logist. 2011, 13, 142–173. [Google Scholar] [CrossRef]
- Fan, T.; Chen, D.; Huang, C.; Tian, C.; Yan, X. Inland vessel travel time prediction via a context-aware deep learning model. J. Mar. Sci. Eng. 2023, 11, 1146. [Google Scholar] [CrossRef]
- Huang, C.; Huang, Y.; Yu, Y.; Xiao, B. Predicting liner arrival time based on deep learning. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology, ICCASIT 2021, Changsha, China, 20–22 October 2021. [Google Scholar] [CrossRef]
- Jahn, C.; Scheidweiler, T. Port Call Optimization by Estimating Ships’ Time of Arrival; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Kolley, L.; Rückert, N.; Kastner, M.; Jahn, C.; Fischer, K. Robust berth scheduling using machine learning for vessel arrival time prediction. Flex. Serv. Manuf. J. 2023, 35, 29–69. [Google Scholar] [CrossRef]
- Kwun, H.; Bae, H. Prediction of vessel arrival time usingc auto identification system data. Int. J. Innov. Comput. Inf. Control. 2021, 17, 725–734. [Google Scholar] [CrossRef]
- Lin, C.X.; Huang, T.W.; Guo, G.; Wong, M.D.F. MtDetector: A high-performance marine traffic detector at stream scale. In Proceedings of the 12th ACM International Conference on Distributed and Event-Based Systems, Hamilton, New Zealand, 25–29 June 2018; pp. 205–208. [Google Scholar] [CrossRef]
- Nguyen, D.D.; Van, C.L.; Ali, M.I. Vessel trajectory prediction using sequence-to-sequence models over spatial grid. In Proceedings of the DEBS 2018—12th ACM International Conference on Distributed and Event-Based Systems, Hamilton, New Zealand, 25–29 June 2018. [Google Scholar] [CrossRef]
- Noman, A.A.; Heuermann, A.; Wiesner, S.A.; Thoben, K.D. Towards data-driven GRU based ETA prediction approach for vessels on both inland natural and artificial waterways. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC, , Indianapolis, IN, USA, 19–22 September 2021; Volume 2021. [Google Scholar] [CrossRef]
- Ogura, T.; Inoue, T.; Uchihira, N. Prediction of arrival time of vessels considering future weather conditions. Appl. Sci. 2021, 11, 4410. [Google Scholar] [CrossRef]
- Pani, C.; Fadda, P.; Fancello, G.; Frigau, L.; Mola, F. A data mining approach to forecast late arrivals in a transhipment container terminal. Transport 2014, 29, 175–184. [Google Scholar] [CrossRef]
- Pani, C.; Vanelslander, T.; Fancello, G.; Cannas, M. Prediction of late/early arrivals in container terminals—A qualitative approach. Eur. J. Transp. Infrastruct. Res. 2015, 15, 536–550. [Google Scholar] [CrossRef]
- Park, K.; Sim, S.; Bae, H. Vessel estimated time of arrival prediction system based on a Path-Finding algorithm. Marit. Transp. Res. 2021, 2, 100012. [Google Scholar] [CrossRef]
- Rahman, M.; Haque, E.; Tasneem Rahman, S.; Ahmed, Y.; Habibul Kabir, K. Modelling of an efficient system for prediction ships’ estimated time of arrival using artificial neural network. In Computational Intelligence; Lecture Notes in Electrical Engineering; Shukla, A., Murthy, B., Hasteer, N., Van Belle, J.P., Eds.; Springer: Berlin/Heidelberg, Germany, 2023; Volume 968, pp. 199–206. [Google Scholar] [CrossRef]
- Roşca, V.; Diac, P.; Onica, E.; Amariei, C. Predicting destinations by Nearest Neighbor Search on training vessel routes. In Proceedings of the DEBS 2018—12th ACM International Conference on Distributed and Event-Based Systems, Hamilton, New Zealand, 25–29 June 2018. [Google Scholar] [CrossRef]
- Salleh, N.H.M.; Riahi, R.; Yang, Z.; Wang, J. Predicting a containership’s arrival punctuality in liner operations by Using a Fuzzy Rule-based Bayesian Network (FRBBN). Asian J. Shipp. Logist. 2017, 33, 95–104. [Google Scholar] [CrossRef]
- Sathiaraj, D.; Smith, A.; Rohli, E.; Hsieh, C.; Salindong, A.; Woolsey, N.; Tec, A. RippleGo—An AI-based voyage planner for US inland waterways. In Proceedings of the 2023 IEEE Conference on Artificial Intelligence, CAI 2023, Santa Clara, CA, USA, 5–6 June 2023. [Google Scholar] [CrossRef]
- Servos, N.; Liu, X.; Teucke, M.; Freitag, M. Travel time prediction in a multimodal freight transport relation using machine learning algorithms. Logistics 2020, 4, 1. [Google Scholar] [CrossRef]
- Veenstra, A.W.; Harmelink, R.L. Process mining ship arrivals in port: The case of the port of Antwerp. Marit. Econ. Logist. 2022, 24, 584–601. [Google Scholar] [CrossRef]
- Jung, H.; Lee, K.W.; Choi, J.H.; Cho, E.S. Bayesian estimation of vessel destination and arrival times. In Proceedings of the DEBS ’18: 12th ACM International Conference on Distributed and Event-Based Systems, Hamilton, New Zealand, 25–29 June 2018. [Google Scholar] [CrossRef]
- Wenzel, P.; Jovanovic, R.; Schulte, F. A Neural Network approach for ETA prediction in inland waterway transport. Lect. Notes Comput. Sci. 2023, 14239, 219–232. [Google Scholar] [CrossRef]
- Wu, X.; Roy, U.; Hamidi, M.; Craig, B.N. Estimate travel time of ships in narrow channel based on AIS data. Ocean. Eng. 2020, 202, 106790. [Google Scholar] [CrossRef]
- Yoon, J.H.; Kim, D.H.; Yun, S.W.; Kim, H.J.; Kim, S. Enhancing vontainer vessel arrival time prediction through past voyage route modeling: A case study of Busan new port. J. Mar. Sci. Eng. 2023, 11, 1234. [Google Scholar] [CrossRef]
- Yu, J.; Tang, G.; Song, X.; Yu, X.; Qi, Y.; Li, D.; Zhang, Y. Ship arrival prediction and its value on daily container terminal operation. Ocean. Eng. 2018, 157, 73–86. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, X.; Li, P. Prediction model of ship arrival time using Neural Network and Kalman Filter. In Proceedings of the 2023 3rd International Conference on Neural Networks, Information and Communication Engineering, NNICE 2023, Guangzhou, China, 24–26 February 2023. [Google Scholar] [CrossRef]
- Awad, M.; Khanna, R. Support Vector Machines for classification. In Efficient Learning Machines: Theories, Concepts, and Applications for Engineers and System Designers; Apress: Berkeley, CA, USA, 2015. [Google Scholar] [CrossRef]
- Song, Y.Y.; Lu, Y. Decision tree methods: Applications for classification and prediction. Shanghai Arch. Psychiatry 2015, 27, 130–135. [Google Scholar] [CrossRef] [PubMed]
- Yucesan, M.; Gul, M.; Celik, E. A holistic FMEA approach by Fuzzy-based Bayesian Network and best–worst method. Complex Intell. Syst. 2021, 7, 1547–1564. [Google Scholar] [CrossRef]
- Yang, D.; Wu, L.; Wang, S.; Jia, H.; Li, K.X. How big data enriches maritime research – a critical review of Automatic Identification System (AIS) data applications. Transp. Rev. 2019, 39, 755–773. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inclusion Criteria | Exclusion Criteria |
|---|---|
| Only publications in English and accessible in their full length are included in the analysis. | Duplicate reports of the same study, retain only the most complete version or the most recent report. |
| An algorithm for modeling ETA must be included in the paper. | Abstracts, editorials, books, notes, conference reviews and unpublished material. |
| The paper has to provide an answer to at least one of the research questions. | Insufficient detail to understand the experiment architecture and design. |
| Article | Used Algorithms | Best Algorithm | Data Source | Factors Used in ETA Modeling | Performance Metrics |
|---|---|---|---|---|---|
| [9] | Path-Finding | AIS, LRIT | |||
| [10] | MLP | MLP | AIS | ||
| [11] | Venilia | Venilia | AIS | Vessel name, Vessel type, Speed, Course over ground, Heading, Source port, Draught, MMSI, Direction of the vessel trajectory, Direction pointed by the vessel bow, Event timestamp, Reported source port name | |
| [12] | Transformer, MLP, CNN, LSTM, BiLSTM | BiLSTM | AIS | Trip identification number, Latitude of the next vessel position, Longitude of the next vessel position, Distance between current and next position, Maximum draft, Current draft, Vessel length, Vessel width, Deadweight tonnage, Net tonnage, Gross tonnage, Maximum power, Age of the vessel, Vessel type | R2, RMSE, MAE, MSE |
| [13] | RF, CART, BLR, MLP | RF | AIS | Bias, MAD, MAE, MAPE, MSE, RMSE | |
| [14] | NN, LSTM, RNN, GRU | NN | AIS, LRIT, TOS | MAE, MSE | |
| [15] | NN, SVR, RF, GB, RR | NN | AIS | Speed over ground, Course over ground, Heading, Origin and destination port coordinates | MAE, MSE |
| [16] | MLP, LSTM, 1D-CNN, WaveNet | LSTM | AIS | Speed over ground, Course over ground, Heading, Navigational status, Draught, Zonal ocean current velocity, Meridional ocean current velocity, Sea surface temperature, Significant height of combined wind waves and swell, Mean wave period, Mean wave direction, 10 m U-component of wind, 10 m V-component of wind, Gross tonnage, Deadweight, Length, Beam, Year built, Vessel type, Trajectory origin latitude, Trajectory origin longitude, Route leg distance, Route leg speed, Accumulated distance, Remaining distance | MAE, MSE |
| [17] | NN | NN | Ship name, Ship length, Transit time, Number of dockers required for unloading, Number of dockers required for loading, ETA month, ETA day of the week, ETA hour | APE | |
| [18] | Path-Finding, SVR, LSTM, VCIN | VCIN | AIS | MAE, MAPE, RMSE | |
| [19] | SVR, GBT, KNN, RF, XGBoost, SE –ResNext, LightGBM | SE –ResNext | GPS | MAE | |
| [20] | ANN | ANN | AIS | Length, Breadth, Draught, Wind speed, Water Depth, Sea state | |
| [21] | LR, KNN, DTR, ANN | ANN | MAE, R2, MAPE, RMSE | ||
| [22] | Path-Finding | Path-Finding | AIS | APE | |
| [23] | DNN, RNN, LR | DNN | AIS | Vessel type, Speed, Course over ground, Cumulative distance, Cumulative time, Heading, Bearing | MAE |
| [24] | LSTM, GRU | GRU | AIS | Perplexity Score | |
| [25] | GBDT, MLP, GRU | GRU | MAE, RMSE | ||
| [26] | Bayesian Approach | Wave height, Wave period, Wind speed, MMSI, Speed over ground, Course over ground, Heading, Significant wave height, Primary wave mean period, Primary wave direction, North–south wind component, East–west wind component | MAPE | ||
| [27] | CART | ETA at pilot point, ATA at pilot point, Length, Gross tonnage, Capacity, Vessel type, Previous port, Shipping line, Service, Sailing direction, Average speed, Delay, Previous port distance, Sailing | |||
| [28] | LR, CT, RF | RF | Length, Gross tonnage, Capacity, Vector type (mother/feeder), Owner’s name, Owner’s frequency, Port rotation, Sailing direction, ETA at the pilot point, ATA at the pilot point, Presence of a lock before reaching the terminal, Wind speed | ||
| [29] | Path-Finding | AIS | |||
| [30] | ANN | ANN | AIS | MAE, MAPE | |
| [31] | Nearest Route Points Search | Nearest Route Points Search | |||
| [32] | FRBBN | FRBBN | AIS | ||
| [33] | XgBoost, SVR | Average vessel speed, Standard deviation of vessel speed, Lock delay statistics, River level conditions | MAPE, RMSE | ||
| [34] | ExtraTrees, AdaBoost, SVR | SVR | Unit load identifier, Start/end of tracking, Gateway identifier, Temperature, Humidity, Crafted features | MAE, RMSE | |
| [35] | Process Mining | AIS | Port ETA agent, Pilot board at vessel, Approach area ATA vessel, Port ATA vessel, Berth ATA vessel, Pilot switch, Tug standby at vessel, Lock ATA vessel, Lock ATD vessel, Port ETD agent, Anchorage area ATD vessel, Anchorage area ATA vessel, First line secured at vessel, Last line secured at vessel, ETA at pilot point, Berth ATD vessel | ||
| [36] | Bayesian Approach | AIS | |||
| [37] | NN | NN | MMSI, Status of the vessel (underway, moored, etc.), Speed over ground, Course over ground, Heading, ETA, Destination (manual input from the skipper), Draught | MAE, MRE, RMSE | |
| [38] | Self-Developed Algorithm | AIS | Type of a vessel, Width of a vessel, Draft of a vessel, Time of day | ||
| [39] | Self-Developed Algorithm | PORT-MIS, TOS | Vessel name, API call timestamp, Heading, ETA, Destination, Speed over ground, Ship arrival and departure declaration system from Port-MIS system, TOS berth plan | MAE, MAPE, RMSE | |
| [40] | MLP, CART, RF | Vessel name, Vessel type, Length, ETA, ATA, Vessel service route type (trunk/external feeder/internal feeder/barge feeder/domestic trade line) | |||
| [41] | LSTM, BiLSTM, GRU, LSTM-KF | LSTM-KF | AIS | MAE, RMSE |
| Factor | Description |
|---|---|
| Beam | Refers to the width of a vessel at its widest point, crucial for understanding the vessel’s size and for navigational purposes. It is often included in the literature as ‘breadth’ |
| Course over ground (COG) | Indicates the direction in which the vessel is actually moving over the ground, which can differ from its heading due to factors like currents or wind |
| Draught | The vertical distance between the waterline and the bottom of the hull (keel), indicating how deep the vessel sits in the water. This determines the minimum depth of water a ship or boat can safely navigate |
| Heading | The direction in which the front of the vessel, or bow, is pointed, usually measured in degrees from true north. |
| ETA | The time when a vessel expects to arrive at a specific location, such as a port or pilot point. It is manually entered by the pilot. This is an optional field and is often not updated or reliable in raw AIS data. The ETA manually entered into the AIS systems by the pilot is also used to predict or forecast ETA using machine learning methods |
| Length | A key dimension, often measured from the bow to the stern. It is important for classifying the vessel size and for operational considerations in ports and harbors |
| MMSI | A unique nine-digit number assigned to a vessel’s AIS transponder, serving as an identification number for the vessel in radio communications |
| Navigational status | Indicates the operational condition of the vessel, such as whether it is underway, at anchor, moored, or not under command. It provides essential information about its current activity |
| Position latitude | The north–south coordinate of the vessel’s geographical position, an essential part of its global positioning for navigation and tracking |
| Position longitude | The east–west coordinate of the vessel’s geographical position, the second component of its precise global location |
| Speed over ground (SOG) | The vessel’s speed relative to the ground, which differs from the speed through water due to currents. It is important for voyage planning and safety |
| Timestamp | The date and time information associated with the AIS data, used to contextualize all other AIS factors in terms of when they were recorded |
| Vessel name | The name of the vessel as registered and displayed, used for identification and communication purposes |
| Vessel type | The classification of the vessel according to its purpose or physical characteristics, such as a cargo ship, tanker, or passenger ship. This is crucial for identification, regulation, and operational purposes |
| Factors | Description |
|---|---|
| Bearing | The angle between a ship’s current position and the magnetic north |
| Capacity | The maximum number of containers, total volume, or weight of cargo that a vessel can carry |
| Deadweight tonnage (DWT) | The measure of a vessel’s carrying capacity in terms of weight, including cargo, fuel, crew, and provisions |
| Gross tonnage (GT) | The measure of the overall internal volume of a vessel, including all enclosed spaces |
| Shipping line | A company that owns and operates ships, providing information about vessel ownership, such as the owner’s name and the frequency of the vessel’s operations or voyages |
| Vector type | The choice between a mother vessel and a feeder vessel, considering the physical and structural differences between the two types of vessels and the different services offered by the container terminal to compensate for delays [28] |
| Year built | The year in which the vessel was constructed, indicating its age, which can impact its technology, efficiency, and compliance with current maritime regulations |
| Factor | Description |
|---|---|
| 10 M U-component of wind | Measures the east–west component of wind speed at a height of 10 m above the sea surface, indicating the horizontal movement of air from west to east |
| 10 M V-component of wind | Quantifies the north–south component of wind speed at 10 m above the sea surface, showing the movement of air from south to north |
| Humidity | The amount of water vapor present in the air, influencing comfort levels, visibility, and precipitation |
| Mean wave direction | The average direction from which the waves originate |
| Mean wave period | The average time interval between successive waves or the duration of one complete wave cycle |
| Meridional ocean current velocity | The speed and direction of ocean currents along the north–south axis |
| Significant height of combined wind waves and swell | The average height of the highest third of waves, including both wind-generated waves and swell |
| Significant wave height | The average height of the highest third of observed waves |
| Sea surface temperature | The temperature at the sea’s surface |
| Sea state | A description of the ocean’s surface conditions, including wave height and wind force |
| Water level | The depth or height of water in seas, oceans, or rivers |
| Temperature | The degree of hotness or coldness of the air |
| Wave height | The vertical distance between the crest (top) and trough (bottom) of a wave |
| Wind speed | The rate at which air is moving in the atmosphere |
| Zonal ocean current velocity | The speed and direction of ocean currents along the east–west axis |
| Factor | Description |
|---|---|
| Cumulative distance | The total moving distance from a ship’s departure to its current timestamp, often termed Destination Absolute Distance |
| Cumulative time | The total traveling time of a ship from departure to its current timestamp, measured in minutes |
| Cluster parameters | Parameters developed from route data related to the trip, such as current geofence location, last geofence location, and current country [34] |
| Destination position | The final point to which a vessel is traveling, critical for route planning and cargo delivery [15] |
| Delay | Calculated as the difference between the actual time of arrival at the pilot point and the ETA |
| Event time parameters | Includes parameters such as event timestamp, the exact date and time at which a specific event occurs during the vessel’s journey [11,34]. These parameters may include current day of week, current time in hours, departure day of week, and departure time in hours |
| Origin position | The geographical coordinates or port where a vessel begins or from which cargo originates. It could be reported as source port name [11] or trajectory origin coordinates [15,16] |
| Previous port distance | The distance between the previous port of call and the current or next port |
| Sailing status | Divided into two classes: sailed and not sailed, indicating if a vessel notified the ETA once it had left the previous port or while it was still in port |
| Remaining distance | The distance a ship still has to travel to reach its destination |
| Route leg distance | The distance between two consecutive points or stops along a vessel’s route, crucial for route planning and determining the duration of different voyage segments. A similar input feature is named absolute distance to previous [34] |
| Route leg speed | The average speed of a vessel over a specific leg of its journey, important for assessing the efficiency of different route segments. Similar types of route leg speed-related features, such as average speed previous, past average absolute speed, counter average speed 1 to 30, and counter average speed above 60, are considered [34] |
| Factors | Description |
|---|---|
| Anchorage area ATA vessel | The actual time when a vessel arrives in the designated anchorage area of a port |
| Anchorage area ATD vessel | The actual time when a vessel departs from the anchorage area of a port |
| ATA at pilot point | The actual time of arrival of a vessel at the pilot point, a specific location where a harbor pilot typically boards the vessel to assist in navigating to the berth |
| API Call Timestamp | The exact date and time when an API call is made, commonly used in digital systems for tracking and logging data requests |
| Approach area ATA vessel | The actual time when a vessel arrives in the approach area of a port, typically the navigational area just before the berthing sections |
| Berth ATA vessel | The actual time of arrival of a vessel at its assigned berth in a port, crucial for port operations and logistics planning |
| Berth ATD vessel | The actual time of departure of a vessel from its berth, marking the end of its stay at that specific docking point in the port |
| Gateway identifier | A unique identifier used in logistics or port management systems to identify a specific entry or exit point in a terminal or port |
| Lock delay statistics | Measures the time spent by vessels waiting for or passing through waterway locks, providing insights into potential delays in waterway navigation and the efficiency of lock operations. Lock ATA vessel and lock ATD vessel are included in the model of Veenstra and Harmelink [35]. Pani et al. [28] considered the presence of a lock before reaching the terminal |
| Number of dockers required for loading/unloading | The count of dock workers needed to efficiently load or unload cargo onto a vessel |
| Pilot board at vessel | The moment when the navigation pilot comes aboard the vessel, typically to assist with navigating through challenging or congested waters |
| Pilot switch | A change or exchange of pilots on a vessel, often carried out when navigating through different territorial waters or when specialized expertise is needed |
| Port ATA vessel | The actual time a vessel arrives at a port |
| Port ETA agent | The estimated arrival time of a vessel at a port as reported by the agent |
| Port ETD agent | The estimated departure time from a port as reported by the agent |
| Ship arrival and departure declaration system from Port-MIS | A digital or electronic system used by ports to manage and track vessel arrivals and departures |
| Ship service variable | Represents different levels of service quality, as defined in distinct contractual agreements for different routes, including domestic trade line, trunk line, internal feeder line, and barge feeder line. Yu et al. [40] integrated domestic shipping line, and Veenstra and Harmelink [35] include first line secured at vessel and last line secured at vessel into the model |
| Start/End of tracking | Marks the beginning and end of the period during which a vessel’s movement is monitored or recorded |
| TOS Berth plan | A TOS plan that outlines the allocation of vessels to specific berths in a port |
| Tug standby at vessel | Refers to a tugboat being on standby near a vessel, typically for assistance with maneuvers like docking, undocking, or navigating through tight spaces |
| Unit load identifier | An identifier for a specific unit of cargo, used for tracking and logistics purposes |
| Metric | Description |
|---|---|
| APE | This is simply the absolute value of the difference between the predicted value and the actual value. It is a measure of the accuracy of individual predictions |
| Bias | The error introduced when a simplified model is used to approximate a real-world problem is called bias. Underfitting occurs when an algorithm fails to recognize significant relationships between features and target outputs due to high bias |
| MAE | A measure of the average magnitude of errors in a set of predictions, without considering their direction. It is calculated as the average of the absolute differences between the predicted values and observed values |
| MSE | Similar to MAE but squares the differences before averaging them. This has the effect of giving more weight to larger errors |
| MAPE | Similar to MAE, but it expresses the error as a percentage of the observed values. This is particularly useful when you want to understand the relative size of the errors |
| RMSE | The square root of MSE. It is useful because it brings the error metric back to the same unit of measurement as the original data, making interpretation easier |
| MAD | Similar to MAE, it is a measure of variability that shows the average distance between each data point and the mean of the dataset |
| MRE | It is a statistical measure that compares the average of the absolute differences between observed and predicted values, relative to the observed values, often used to assess the accuracy of a predictive model |
| PS | Often used in natural language processing, perplexity is a measurement of how well a probability model predicts a sample. It is a way of evaluating language models, with lower perplexity indicating a better model |
| R2 | A statistical measure that indicates the extent to which one or more independent variables in a regression model explain the observed variability in a dependent variable |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noman, A.A.; Heuermann, A.; Wiesner, S.; Thoben, K.-D. A Review of Vessel Time of Arrival Prediction on Waterway Networks: Current Trends, Open Issues, and Future Directions. Computers 2025, 14, 41. https://doi.org/10.3390/computers14020041
Noman AA, Heuermann A, Wiesner S, Thoben K-D. A Review of Vessel Time of Arrival Prediction on Waterway Networks: Current Trends, Open Issues, and Future Directions. Computers. 2025; 14(2):41. https://doi.org/10.3390/computers14020041
Chicago/Turabian StyleNoman, Abdullah Al, Aaron Heuermann, Stefan Wiesner, and Klaus-Dieter Thoben. 2025. "A Review of Vessel Time of Arrival Prediction on Waterway Networks: Current Trends, Open Issues, and Future Directions" Computers 14, no. 2: 41. https://doi.org/10.3390/computers14020041
APA StyleNoman, A. A., Heuermann, A., Wiesner, S., & Thoben, K.-D. (2025). A Review of Vessel Time of Arrival Prediction on Waterway Networks: Current Trends, Open Issues, and Future Directions. Computers, 14(2), 41. https://doi.org/10.3390/computers14020041