
Spatiotemporal Bayesian Machine Learning for Estimation of an Empirical Lower Bound for Probability of Detection with Applications to Stationary Wildlife Photography


Abstract
1. Introduction
2. Hierarchical Spatial Capture Model
3. Results
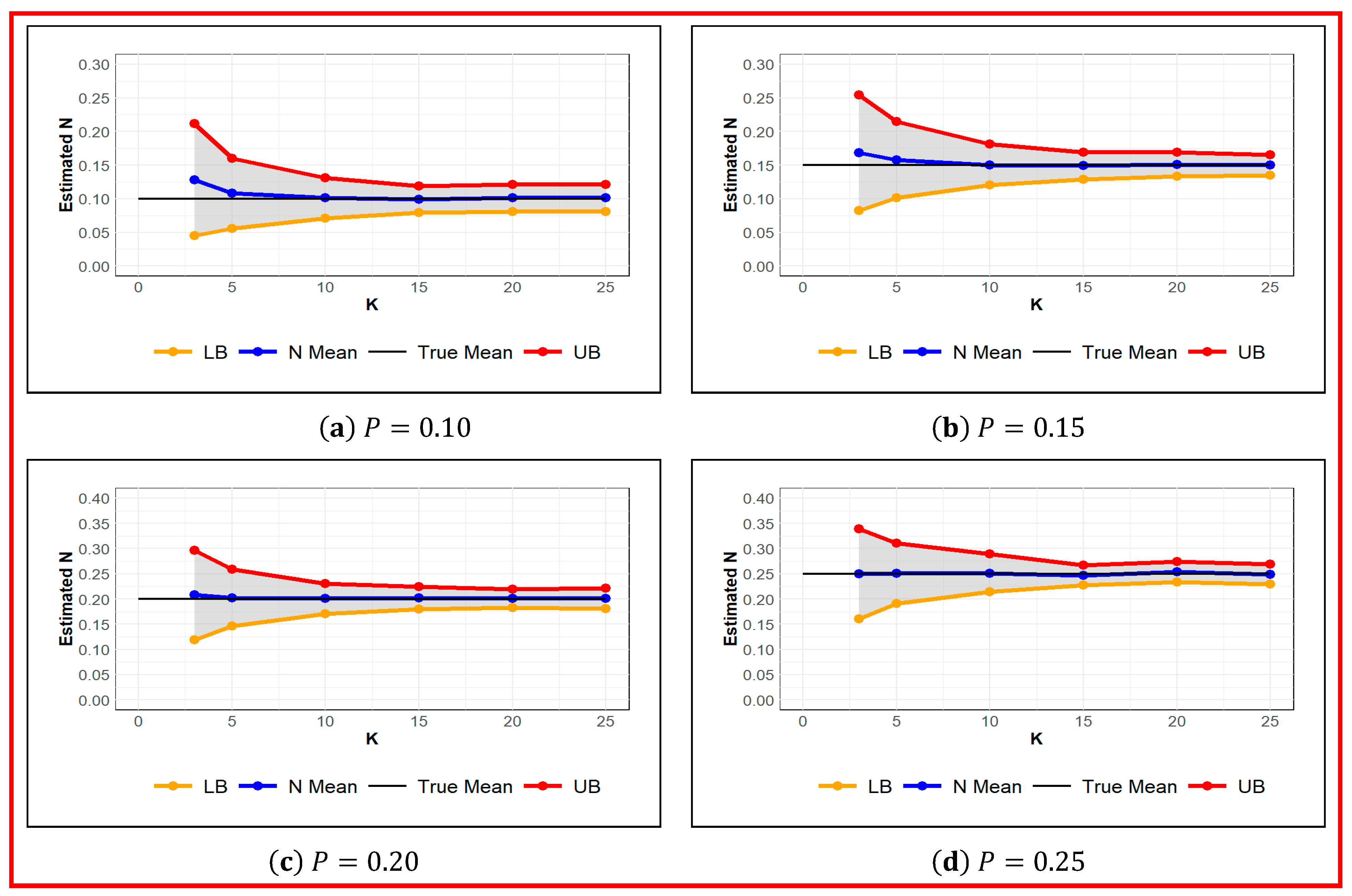
3.1. Sensitivity of to for Different Values of
3.2. Sensitivity of to for Different Values of
3.3. Sensitivity of to for Different Values of
3.4. Sensitivity of to for Different Values of
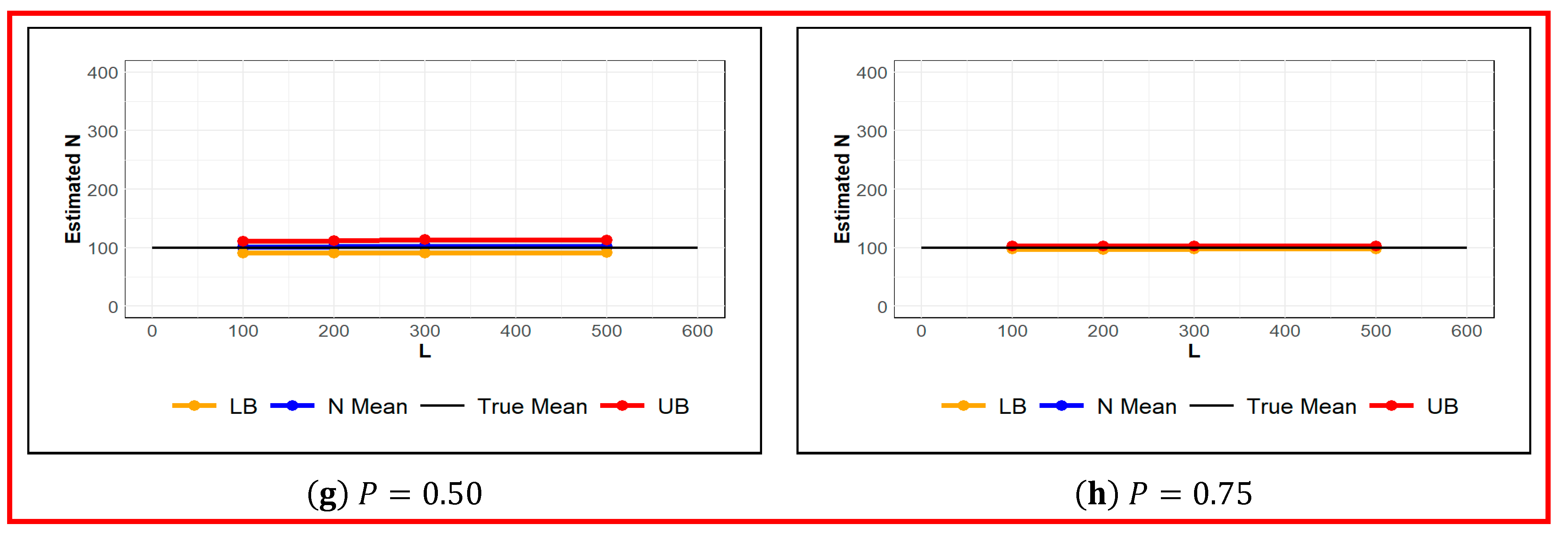
3.5. Sensitivity of to for Different Values of
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pollock, K.H. Capture-Recapture Models: A Review of Current Methods, Assumptions and Experimental Design. Available online: https://repository.lib.ncsu.edu/server/api/core/bitstreams/5b4fd48b-48fb-4eba-adf2-1366811bd4f7/content (accessed on 1 January 2023).
- Nichols, J.D. Capture-Recapture Models. BioScience 1992, 42, 94–102. [Google Scholar] [CrossRef]
- Schwarz, C.J.; Seber, G.A. Estimating animal abundance: Review III. Stat. Sci. 1999, 14, 427–456. [Google Scholar] [CrossRef]
- Pollock, K.H. A Capture-Recapture Design Robust to Unequal Probability of Capture. J. Wildl. Manag. 1982, 46, 752–757. [Google Scholar] [CrossRef]
- Pollock, K.H.; Nichols, J.D.; Brownie, C.; Hines, J.E. Statistical Inference for Capture-Recapture Experiments. Wildl. Monogr. 1990, 107, 3–97. [Google Scholar]
- Karanth, K.U. Estimating Tiger Panthera Tigris Populations from Camera-Trap Data Using Capture Recapture Models. Biol. Conserv. 1995, 71, 333–338. [Google Scholar] [CrossRef]
- O’Connell, A.F.; Nichols, J.D.; Karanth, K.U. Camera Traps in Animal Ecology: Methods and Analyses; Springer: Berlin/Heidelberg, Germany, 2011; Volume 271. [Google Scholar]
- Sollmann, R.; Gardner, B.; Belant, J.L. How does spatial study design influence density estimates from spatial capture-recapture models? PLoS ONE 2012, 7, e34575. [Google Scholar] [CrossRef]
- Engeman, R.M.; Massei, G.; Sage, M.; Gentle, M.N. Monitoring Wild Pig Populations: A Review of Methods; USDA National Wildlife Research Center—Staff Publications: Fort Collins, CO, USA, 2013; Paper 1496. [Google Scholar]
- Royle, J.A.; Young, K.V. A Hierarchical Model for Spatial Capture–Recapture Data. Ecology 2008, 89, 2281–2289. [Google Scholar] [CrossRef]
- Royle, J.A.; Karanth, K.U.; Gopalaswamy, A.M.; Kumar, N.S. Bayesian inference in camera trapping studies for a class of spatial capture–recapture models. Ecology 2009, 90, 3233–3244. [Google Scholar] [CrossRef]
- Kery, M.; Gardner, B.; Stoeckle, T.; Weber, D.; Royle, J.A. Use of Spatial Capture-Recapture Modeling and DNA Data to Estimate Densities of Elusive Animals. Conserv. Biol. 2011, 25, 356–364. [Google Scholar] [CrossRef]
- Borchers, D. A non-technical overview of spatially explicit capture–recapture models. J. Ornithol. 2012, 152 (Suppl. S2), S435–S444. [Google Scholar] [CrossRef]
- Royle, J.A.; Chandler, R.B.; Sollmann, R.; Gardner, B. Spatial Capture-Recapture; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Chandler, R.B.; Royle, J.A. Spatially Explicit Models for Inference About Density in Unmarked or Partially Marked Populations. Ann. Appl. Stat. 2013, 7, 936–954. [Google Scholar] [CrossRef]
- Jaber, M.; Hamad, F.; Breininger, R.D.; Kachouie, N.N. An Enhanced Spatial Capture Model for Population Analysis Using Unidentified Counts through Camera Encounters. Axioms 2023, 12, 1094. [Google Scholar] [CrossRef]
- Royle, J.A.; Dorazio, R.M.; Link, W.A. Analysis of multinomial models with unknown index using data augmentation. J. Comput. Graph. Stat. 2007, 16, 67–85. [Google Scholar] [CrossRef]
- Royle, J.A.; Dorazio, R.M. Parameter-expanded data augmentation for Bayesian analysis of capture–recapture models. J. Ornithol. 2012, 152, 521–537. [Google Scholar] [CrossRef]
- O’Connor, K.M.; Nathan, L.R.; Liberati, M.R.; Tingley, M.W.; Vokoun, J.C.; Rittenhouse, T.A.G. Camera trap arrays improve detection probability of wildlife: Investigating study design considerations using an empirical dataset. PLoS ONE 2017, 12, e0175684. [Google Scholar] [CrossRef]
- Kays, R.; Arbogast, B.S.; Baker-Whatton, M.; Beirne, C.; Boone, H.M.; Bowler, M.; Burneo, S.F.; Cove, M.V.; Ding, P.; Espinosa, S.; et al. An empirical evaluation of camera trap study design: How many, how long and when? Methods Ecol. Evol. 2020, 11, 700–713. [Google Scholar] [CrossRef]
- Hofmeester, T.R.; Cromsigt, J.P.G.M.; Odden, J.; Andrén, H.; Kindberg, J.; Linnel, J.D.C. Framing pictures: A conceptual framework to identify and correct for biases in detection probability of camera traps enabling multi-species comparison. Ecol. Evol. 2019, 9, 2320–2336. [Google Scholar] [CrossRef]
- Kolowski, J.M.; Forrester, T.D. Camera trap placement and the potential for bias due to trails and other features. PLoS ONE 2017, 12, e0186679. [Google Scholar] [CrossRef]
- Mann, G.K.H.; O’Riain, M.J.; Parker, D.M. The road less travelled: Assessing variation in mammal detection probabilities with camera traps in a semi-arid biodiversity hotspot. Biodivers. Conserv. 2015, 24, 531–545. [Google Scholar] [CrossRef]
- Findlay, M.A.; Briers, R.A.; White, P.J.C. Component processes of detection probability in camera-trap studies: Understanding the occurrence of false-negatives. Mammal Res. 2020, 65, 167–180. [Google Scholar] [CrossRef]
- Symington, A.; Waharte, S.; Julier, S.; Trigoni, N. Probabilistic Target Detection by Camera-Equipped UAVs. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4076–4081. [Google Scholar]
- Yamaura, Y.; Kery, M.; Royle, J.A. Study of biological communities subject to imperfect detection: Bias and precision of community N-mixture abundance models in small-sample situations. Ecol. Res. 2016, 31, 289–305. [Google Scholar] [CrossRef]
- Sollmann, R.; Tôrres, N.M.; Furtado, M.M.; Jácomo, A.T.d.A.; Palomares, F.; Roques, S.; Silveira, L. Combining camera-trapping and noninvasive genetic data in a spatial capture–recapture framework improves density estimates for the jaguar. Biol. Conserv. 2013, 167, 242–247. [Google Scholar] [CrossRef]
- Martino, L.; Elvira, V.; Louzada, F. Effective sample size for importance sampling based on discrepancy measures. Signal Process. 2017, 131, 386–401. [Google Scholar] [CrossRef]
- Fabreti, L.G.; Höhna, S. Convergence assessment for Bayesian phylogenetic analysis using MCMC simulation. Methods Ecol. Evol. 2022, 13, 77–90. [Google Scholar] [CrossRef]
- Mohamed, J. A Spatiotemporal Bayesian Model for Population Analysis. Ph.D. Thesis, Florida Institute of Technology, Melbourne, FL, USA, 2022. Available online: https://repository.fit.edu/etd/880 (accessed on 1 January 2023).
- Jaber, M.; Van Woesik, R.; Kachouie, N.N. Probabilistic Detection Model for Population Estimation. In Proceedings of the Second International Conference on Mathematics of Data Science, Old Dominion University, Norfolk, VA, USA; 2018; p. 43. Available online: https://scholar.google.com/citations?user=ghxCwaAeRhoC&hl=en&oi=sra (accessed on 1 January 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P | Median | CI width | |||||
|---|---|---|---|---|---|---|---|
| 0.05 | 100 | 63.117 | 23.836 | 60.803 | 15.444 | 110.790 | 95.346 |
| 200 | 92.557 | 46.258 | 84.495 | 0.041 | 185.073 | 185.032 | |
| 300 | 118.736 | 70.290 | 103.380 | 0 | 259.316 | 281.160 | |
| 500 | 158.755 | 106.403 | 131.850 | 0 | 372.135 | 425.546 | |
| 0.10 | 100 | 87.561 | 20.936 | 87.455 | 45.690 | 129.433 | 83.743 |
| 200 | 114.996 | 41.742 | 109.135 | 31.513 | 198.480 | 166.967 | |
| 300 | 127.075 | 55.131 | 116.400 | 16.814 | 237.337 | 220.523 | |
| 500 | 163.893 | 84.067 | 143.835 | 0 | 332.027 | 336.269 | |
| 0.15 | 100 | 96.244 | 19.387 | 95.480 | 57.470 | 135.018 | 77.548 |
| 200 | 113.999 | 34.327 | 107.975 | 45.344 | 182.653 | 137.309 | |
| 300 | 128.747 | 44.564 | 120.235 | 39.619 | 217.875 | 178.255 | |
| 500 | 124.806 | 49.577 | 112.955 | 25.653 | 223.960 | 198.307 | |
| 0.20 | 100 | 102.536 | 18.035 | 101.115 | 66.466 | 138.606 | 72.140 |
| 200 | 112.681 | 27.015 | 107.935 | 58.651 | 166.711 | 108.060 | |
| 300 | 116.144 | 31.775 | 109.760 | 52.594 | 179.694 | 127.100 | |
| 500 | 116.129 | 32.978 | 109.225 | 50.173 | 182.086 | 131.913 | |
| 0.25 | 100 | 103.320 | 15.866 | 101.765 | 71.589 | 135.052 | 63.463 |
| 200 | 110.304 | 20.596 | 106.990 | 69.112 | 151.497 | 82.385 | |
| 300 | 107.958 | 20.690 | 104.440 | 66.577 | 149.339 | 82.762 | |
| 500 | 105.027 | 19.699 | 101.745 | 65.629 | 144.425 | 78.796 | |
| 0.30 | 100 | 104.417 | 13.511 | 102.810 | 77.395 | 131.440 | 54.045 |
| 200 | 104.887 | 14.861 | 102.745 | 75.166 | 134.609 | 59.442 | |
| 300 | 106.259 | 15.258 | 104.060 | 75.743 | 136.774 | 61.031 | |
| 500 | 104.208 | 14.765 | 102.020 | 74.678 | 133.738 | 59.061 | |
| 0.35 | 100 | 103.611 | 11.107 | 102.180 | 81.397 | 125.824 | 44.427 |
| 200 | 102.305 | 11.132 | 100.870 | 80.041 | 124.569 | 44.528 | |
| 300 | 105.014 | 11.624 | 103.510 | 81.766 | 128.262 | 46.496 | |
| 500 | 102.525 | 10.918 | 101.090 | 80.690 | 124.361 | 43.671 | |
| 0.40 | 100 | 103.678 | 8.853 | 102.595 | 85.972 | 121.384 | 35.411 |
| 200 | 101.986 | 8.678 | 101.005 | 84.631 | 119.342 | 34.712 | |
| 300 | 102.677 | 8.713 | 101.635 | 85.252 | 120.103 | 34.851 | |
| 500 | 103.194 | 8.787 | 102.170 | 85.619 | 120.768 | 35.149 | |
| 0.45 | 100 | 101.257 | 6.517 | 100.540 | 88.223 | 114.291 | 26.067 |
| 200 | 101.053 | 6.741 | 100.320 | 87.571 | 114.536 | 26.965 | |
| 300 | 101.617 | 6.788 | 100.840 | 88.042 | 115.192 | 27.151 | |
| 500 | 101.955 | 6.891 | 101.180 | 88.172 | 115.737 | 27.564 | |
| 0.50 | 100 | 100.616 | 5.247 | 100.020 | 90.121 | 111.110 | 20.988 |
| 200 | 101.476 | 5.334 | 100.855 | 90.807 | 112.144 | 21.336 | |
| 300 | 102.179 | 5.586 | 101.560 | 91.007 | 113.351 | 22.344 | |
| 500 | 102.098 | 5.439 | 101.570 | 91.221 | 112.976 | 21.755 | |
| 0.75 | 100 | 99.980 | 1.426 | 99.727 | 97.128 | 102.831 | 5.703 |
| 200 | 99.868 | 1.412 | 99.640 | 97.021 | 102.631 | 5.610 | |
| 300 | 100.144 | 1.396 | 99.920 | 97.353 | 102.936 | 5.584 | |
| 500 | 100.173 | 1.459 | 99.880 | 97.248 | 103.093 | 5.846 |
| Median | CI width | ||||||
|---|---|---|---|---|---|---|---|
| 0.05 | 100 | 0.105 | 0.054 | 0.092 | 0.000 | 0.214 | 0.217 |
| 200 | 0.088 | 0.054 | 0.074 | 0.000 | 0.196 | 0.216 | |
| 300 | 0.074 | 0.053 | 0.059 | 0.000 | 0.179 | 0.211 | |
| 500 | 0.070 | 0.052 | 0.056 | 0.000 | 0.173 | 0.206 | |
| 0.10 | 100 | 0.128 | 0.042 | 0.121 | 0.045 | 0.212 | 0.167 |
| 200 | 0.109 | 0.046 | 0.101 | 0.018 | 0.201 | 0.182 | |
| 300 | 0.113 | 0.049 | 0.105 | 0.015 | 0.212 | 0.197 | |
| 500 | 0.098 | 0.046 | 0.089 | 0.005 | 0.191 | 0.186 | |
| 0.15 | 100 | 0.169 | 0.043 | 0.164 | 0.083 | 0.255 | 0.172 |
| 200 | 0.156 | 0.048 | 0.151 | 0.060 | 0.251 | 0.191 | |
| 300 | 0.144 | 0.047 | 0.139 | 0.050 | 0.238 | 0.189 | |
| 500 | 0.154 | 0.050 | 0.149 | 0.054 | 0.254 | 0.201 | |
| 0.20 | 100 | 0.211 | 0.044 | 0.207 | 0.123 | 0.300 | 0.177 |
| 200 | 0.198 | 0.048 | 0.195 | 0.103 | 0.293 | 0.190 | |
| 300 | 0.192 | 0.048 | 0.190 | 0.096 | 0.289 | 0.193 | |
| 500 | 0.198 | 0.049 | 0.196 | 0.101 | 0.296 | 0.195 | |
| 0.25 | 100 | 0.253 | 0.045 | 0.251 | 0.163 | 0.343 | 0.180 |
| 200 | 0.243 | 0.046 | 0.241 | 0.151 | 0.336 | 0.185 | |
| 300 | 0.250 | 0.047 | 0.248 | 0.156 | 0.344 | 0.189 | |
| 500 | 0.251 | 0.048 | 0.250 | 0.156 | 0.346 | 0.190 | |
| 0.30 | 100 | 0.299 | 0.044 | 0.297 | 0.210 | 0.388 | 0.178 |
| 200 | 0.296 | 0.045 | 0.295 | 0.205 | 0.387 | 0.182 | |
| 300 | 0.295 | 0.045 | 0.294 | 0.204 | 0.385 | 0.181 | |
| 500 | 0.297 | 0.046 | 0.296 | 0.205 | 0.388 | 0.183 | |
| 0.35 | 100 | 0.345 | 0.043 | 0.345 | 0.258 | 0.432 | 0.174 |
| 200 | 0.349 | 0.044 | 0.348 | 0.261 | 0.437 | 0.175 | |
| 300 | 0.342 | 0.044 | 0.342 | 0.255 | 0.430 | 0.175 | |
| 500 | 0.351 | 0.044 | 0.351 | 0.263 | 0.439 | 0.175 | |
| 0.40 | 100 | 0.393 | 0.042 | 0.393 | 0.310 | 0.476 | 0.167 |
| 200 | 0.396 | 0.042 | 0.396 | 0.312 | 0.480 | 0.168 | |
| 300 | 0.398 | 0.042 | 0.398 | 0.314 | 0.481 | 0.167 | |
| 500 | 0.395 | 0.042 | 0.394 | 0.311 | 0.478 | 0.167 | |
| 0.45 | 100 | 0.454 | 0.040 | 0.455 | 0.375 | 0.533 | 0.158 |
| 200 | 0.449 | 0.040 | 0.449 | 0.368 | 0.529 | 0.160 | |
| 300 | 0.447 | 0.040 | 0.447 | 0.367 | 0.527 | 0.160 | |
| 500 | 0.444 | 0.040 | 0.445 | 0.364 | 0.525 | 0.160 | |
| 0.50 | 100 | 0.502 | 0.038 | 0.502 | 0.426 | 0.577 | 0.151 |
| 200 | 0.501 | 0.038 | 0.501 | 0.425 | 0.577 | 0.152 | |
| 300 | 0.489 | 0.038 | 0.490 | 0.413 | 0.566 | 0.153 | |
| 500 | 0.496 | 0.038 | 0.496 | 0.420 | 0.571 | 0.152 | |
| 0.75 | 100 | 0.748 | 0.027 | 0.749 | 0.694 | 0.802 | 0.108 |
| 200 | 0.750 | 0.027 | 0.751 | 0.696 | 0.804 | 0.107 | |
| 300 | 0.752 | 0.027 | 0.753 | 0.698 | 0.806 | 0.107 | |
| 500 | 0.744 | 0.027 | 0.745 | 0.690 | 0.799 | 0.109 |
| Median | LB | UB | CI width | ||||
|---|---|---|---|---|---|---|---|
| 3 | 0.10 | 87.561 | 20.936 | 87.455 | 45.690 | 129.433 | 83.743 |
| 0.15 | 96.057 | 19.428 | 95.360 | 57.202 | 134.912 | 77.710 | |
| 0.20 | 100.310 | 17.810 | 98.970 | 64.691 | 135.929 | 71.239 | |
| 0.25 | 104.373 | 16.066 | 102.750 | 72.241 | 136.506 | 64.265 | |
| 5 | 0.10 | 98.903 | 18.249 | 98.260 | 62.405 | 135.401 | 72.996 |
| 0.15 | 101.974 | 15.193 | 100.400 | 71.587 | 132.361 | 60.774 | |
| 0.20 | 103.402 | 12.086 | 101.960 | 79.230 | 127.575 | 48.345 | |
| 0.25 | 101.285 | 8.659 | 100.370 | 83.967 | 118.602 | 34.634 | |
| 10 | 0.10 | 102.521 | 12.239 | 101.120 | 78.043 | 126.998 | 48.955 |
| 0.15 | 99.711 | 6.770 | 99.020 | 86.171 | 113.251 | 27.080 | |
| 0.20 | 99.748 | 4.266 | 99.310 | 91.217 | 108.279 | 17.062 | |
| 0.25 | 99.779 | 2.802 | 99.435 | 94.174 | 105.383 | 11.209 | |
| 15 | 0.10 | 100.763 | 7.213 | 100.085 | 86.337 | 115.190 | 28.853 |
| 0.15 | 100.843 | 3.748 | 100.420 | 93.347 | 108.339 | 14.992 | |
| 0.20 | 99.963 | 2.074 | 99.740 | 95.816 | 104.110 | 8.294 | |
| 0.25 | 100.490 | 1.271 | 100.200 | 97.948 | 103.032 | 5.084 | |
| 20 | 0.10 | 100.432 | 4.572 | 99.990 | 91.288 | 109.576 | 18.288 |
| 0.15 | 100.238 | 2.206 | 99.970 | 95.826 | 104.650 | 8.824 | |
| 0.20 | 99.931 | 1.124 | 99.760 | 97.682 | 102.180 | 4.497 | |
| 0.25 | 100.026 | 0.559 | 99.714 | 98.909 | 101.143 | 2.234 | |
| 25 | 0.10 | 99.595 | 3.179 | 99.200 | 93.237 | 105.954 | 12.717 |
| 0.15 | 99.942 | 1.404 | 99.680 | 97.134 | 102.749 | 5.615 | |
| 0.20 | 99.975 | 0.637 | 99.590 | 98.702 | 101.249 | 2.547 | |
| 0.25 | 99.983 | 0.286 | 99.900 | 99.411 | 100.555 | 1.144 |
| Median | LB | UB | CI width | ||||
|---|---|---|---|---|---|---|---|
| 3 | 0.10 | 0.128 | 0.042 | 0.121 | 0.045 | 0.212 | 0.167 |
| 0.15 | 0.168 | 0.043 | 0.163 | 0.082 | 0.254 | 0.172 | |
| 0.20 | 0.208 | 0.044 | 0.204 | 0.119 | 0.296 | 0.177 | |
| 0.25 | 0.250 | 0.045 | 0.248 | 0.161 | 0.339 | 0.178 | |
| 5 | 0.10 | 0.108 | 0.026 | 0.105 | 0.056 | 0.160 | 0.103 |
| 0.15 | 0.158 | 0.029 | 0.156 | 0.101 | 0.215 | 0.114 | |
| 0.20 | 0.202 | 0.028 | 0.201 | 0.146 | 0.259 | 0.113 | |
| 0.25 | 0.251 | 0.030 | 0.250 | 0.191 | 0.311 | 0.120 | |
| 10 | 0.10 | 0.101 | 0.015 | 0.100 | 0.071 | 0.131 | 0.060 |
| 0.15 | 0.150 | 0.015 | 0.150 | 0.120 | 0.181 | 0.062 | |
| 0.20 | 0.201 | 0.015 | 0.201 | 0.171 | 0.231 | 0.061 | |
| 0.25 | 0.251 | 0.019 | 0.251 | 0.214 | 0.289 | 0.075 | |
| 15 | 0.10 | 0.099 | 0.010 | 0.099 | 0.079 | 0.119 | 0.040 |
| 0.15 | 0.149 | 0.010 | 0.149 | 0.129 | 0.169 | 0.040 | |
| 0.20 | 0.202 | 0.011 | 0.202 | 0.180 | 0.224 | 0.044 | |
| 0.25 | 0.247 | 0.010 | 0.247 | 0.227 | 0.267 | 0.040 | |
| 20 | 0.10 | 0.101 | 0.010 | 0.101 | 0.081 | 0.121 | 0.040 |
| 0.15 | 0.151 | 0.009 | 0.151 | 0.133 | 0.169 | 0.037 | |
| 0.20 | 0.201 | 0.009 | 0.201 | 0.183 | 0.219 | 0.036 | |
| 0.25 | 0.254 | 0.010 | 0.254 | 0.234 | 0.274 | 0.040 | |
| 25 | 0.10 | 0.101 | 0.010 | 0.101 | 0.081 | 0.121 | 0.040 |
| 0.15 | 0.150 | 0.007 | 0.150 | 0.135 | 0.165 | 0.030 | |
| 0.20 | 0.201 | 0.010 | 0.201 | 0.181 | 0.221 | 0.040 | |
| 0.25 | 0.249 | 0.010 | 0.249 | 0.229 | 0.269 | 0.040 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaber, M.; Breininger, R.D.; Hamad, F.; Kachouie, N.N. Spatiotemporal Bayesian Machine Learning for Estimation of an Empirical Lower Bound for Probability of Detection with Applications to Stationary Wildlife Photography. Computers 2024, 13, 255. https://doi.org/10.3390/computers13100255
Jaber M, Breininger RD, Hamad F, Kachouie NN. Spatiotemporal Bayesian Machine Learning for Estimation of an Empirical Lower Bound for Probability of Detection with Applications to Stationary Wildlife Photography. Computers. 2024; 13(10):255. https://doi.org/10.3390/computers13100255
Chicago/Turabian StyleJaber, Mohamed, Robert D. Breininger, Farag Hamad, and Nezamoddin N. Kachouie. 2024. "Spatiotemporal Bayesian Machine Learning for Estimation of an Empirical Lower Bound for Probability of Detection with Applications to Stationary Wildlife Photography" Computers 13, no. 10: 255. https://doi.org/10.3390/computers13100255
APA StyleJaber, M., Breininger, R. D., Hamad, F., & Kachouie, N. N. (2024). Spatiotemporal Bayesian Machine Learning for Estimation of an Empirical Lower Bound for Probability of Detection with Applications to Stationary Wildlife Photography. Computers, 13(10), 255. https://doi.org/10.3390/computers13100255