Abstract
The notions of a collaborative virtual power plant ecosystem (CVPP-E) and a cognitive household digital twin (CHDT) have been proposed as contributions to the efficient organization and management of households within renewable energy communities (RECs). CHDTs can be modeled as software agents that are designed to possess some cognitive capabilities, enabling them to make autonomous decisions on behalf of their human owners based on the value system of their physical twin. Due to their cognitive and decision-making capabilities, these agents can exhibit some behavioral attributes, such as engaging in diverse collaborative actions aimed at achieving some common goals. These behavioral attributes can be directed to the promotion of sustainable energy consumption in the ecosystem. Along this line, this work demonstrates various collaborative practices that include: (1) collaborative roles played by the CVPP manager such as (a) opportunity seeking and goal formulation, (b) goal proposition/invitation to form a coalition or virtual organization, and (c) formation and dissolution of coalitions; and (2) collaborative roles played by CHDTs which include (a) acceptance or decline of an invitation based on (i) delegation/non-delegation and (ii) value system compatibility/non-compatibility, and (b) the sharing of common resources. This study adopts a simulation technique that involves the integration of multiple simulation methods such as system dynamics, agent-based, and discrete event simulation techniques in a single simulation environment. The outcome of this study confirms the potential of adding cognitive capabilities to CHDTs and further shows that these agents could exhibit certain collaborative attributes, enabling them to become suitable as rational decision-making agents in households.
1. Introduction
According to the related literature, renewable energy communities (RECs) have been suggested to aid in boosting the integration of renewable energy sources in the electrical grid [1]. Additionally, this notion aims to improve “energy democracy” and minimize “energy poverty”, by raising public awareness and interest in the patronage of renewable energy-related issues [2,3]. The European Parliament and the Council of the European Union [4] has claimed that open and voluntary participation usually forms the foundation on which RECs are formed. It is further claimed that actors (stakeholders) that participate in RECs are often autonomous, heterogenous, distributed, and mostly situated close to the energy resource. Members of RECs can produce their energy, which can then be used locally, stored, sold, or shared with others within the community or neighborhood.
To help increase the penetration of RECs in member countries, the Union, as per [4], mandates member states to ensure that the final consumer, particularly household consumers, be allowed to participate in RECs while keeping their rights and obligations as final consumers. Furthermore, these EU members shall ensure that consumers create, consume, store, and sell renewable energy through renewable energy purchase agreements.
According to estimates from sources such as [5], there are currently more than 7700 RECs, involving over two million people, in the European Union. These RECs contribute an estimated capacity of no less than 6.3 GW, amounting to 7% of the installed capacity of the Union’s energy stock. Furthermore, an approximate amount of 2.6 billion Euros has also been invested in RECs so far. Similarly, the United Kingdom has over 5000 RECs that have also added more than 60 MW of energy to the kingdom’s energy supply and over 23 million pounds for the benefit of local communities.
The problem that is often associated with RECs is that having to organize and manage them efficiently is often a challenging feat. This is because they require the proficient management of the interactions that occur between the involved actors, who have already been described as autonomous, heterogenous, and distributed entities, each of which has its unique needs, preferences, priorities, objectives, and expectations. Furthermore, in an ecosystem where sharing behaviors are predominantly practiced, managing trust, value creation, and the sharing of rewards could be problematic if not managed adequately.
Although several useful contributions have already been recommended in the literature to address these challenges, many open issues remain. As an additional contribution, the notions of the cognitive household digital twin (CHDT) and collaborative virtual power plant ecosystem (CVPP-E) are two complementary concepts that have been suggested to help in the same line [6]. The central and underlying principle in these two complementary concepts is the use of “collaboration” as a mechanism for the management of and decision-making in the REC ecosystems. The CVPP-E can be represented by a digital twin (DT), i.e., a virtual representation of an REC environment. The CHDTs can also be represented by a digital twin. The advantages of adopting these concepts are that: (a) the participating actors can actively engage in pro-sustainable endeavors within the ecosystems without necessarily having to compromise their individual needs, preferences, priorities, objectives, and expectations; (b) the DT concept is identified in the dominant literature as a key technology enabler that can help to increase the efficient management of energy systems as claimed by [7]; and (c), DTs are claimed to have the potential to be optimized to best serve the current and future energy needs of occupants within the built environment [7].
The potential applicability of these concepts has been demonstrated in some earlier works using prototype models of the CVPP-E and CHDTs. For instance, in [6], CHDTs are modelled to adopt collaborative behaviors to promote sustainable energy consumption. Similarly, in [8], the notions of DT and IoT integration into these concepts are presented and discussed. Furthermore, the ability to delegate some autonomy levels to these CHDTs is demonstrated in [9] and, finally, the ability to influence the decisions of these CHDTs is also briefly explored in [10].
In this article, our key objective is to show how these CHDTs can engage in collaborative behaviors, using software simulation techniques. To help focus on this objective, the following research question is defined:
RQ-1: Using multimethod simulation techniques, how can the following collaborative behaviors within the CVPP-E be demonstrated?
- a.
- Collaborative roles/behaviors played by the CVPP manager such as
- -
- opportunity-seeking and goal-formulation;
- -
- goal proposition/invitation to form a coalition or Virtual Organization;
- -
- formation and dissolution of coalitions.
- b.
- Collaborative roles/behaviors played by CHDTs. These may include acceptance or decline of an invitation based on:
- -
- delegation or non-delegation,
- -
- value system compatibility or non-compatibility.
RQ-2: How can the sharing of a common resource such as a community energy storage system be demonstrated in the CVPP-E?
The relevance of the selected research questions is threefold. First, to verify the adequacy of the modelling technique. The need to test this adequacy is due to the fact that the behaviors under investigation are complex, multifaceted, and non-deterministic. Furthermore, since this is an area that has been little explored in terms of modeling, it is necessary to first explore or evaluate how the adopted modelling techniques can adequately support this study. Second, collaboration is the fulcrum around which our proposed ecosystem revolves, where collaborative behaviors form the mechanism that underpins the management, survival, and operations of these ecosystems. Therefore, it is necessary to (a) identify the key players in the ecosystem, (b) define their collaborative roles, and (c) perform simulations to determine how the coordination of these roles can help achieve the general objective of the community. Third, the sharing of resources is a key element in any collaborative ecosystem. Thus, these research questions are proposed to serve as a general guide for the entire study.
In terms of contribution, this work aims to show that, through their cognitive intelligence, and autonomous decision-making capabilities, CHDTs can act as complementary decision support systems within energy ecosystems. Through their “cognitive intelligence” elements, CHDTs can engage in collaborative endeavors and mechanisms that can facilitate sustainable energy consumption within renewable energy communities.
This article extends and refines a preliminary version presented at the DoCEIS 2022 conference [10]. Subsequent sections of this study are as follows: Section 2 focuses on the background concepts and knowledge, followed by a brief overview of related works in Section 3. Section 4 addresses the modeling methodology while Section 5 focuses on the simulation models of collaborative behaviors. Finally, in Section 6 we discuss the simulation results and draw some conclusions as well as provide recommendations for future works.
2. Theoretical Background
2.1. Collaborative Networks
It is evident in the literature regarding the domain of collaborative networks (CN) that its knowledge base has expanded significantly during the last 20 years [11]. The rapid growth in this scientific domain has arisen from the numerous challenges that today’s society is facing as we pursue the “digital transformation” agenda, which is expected to transition our current society to a digitalized society, namely, Society 5.0 [12]. This agenda pursues the introduction of intelligence into all facets of technology, as well as promoting the hyperconnectivity of millions of organizations, people, and things. Additionally, the blurring of physical and virtual spaces in the context of cyber–physical systems/IoT, is likely to lead to future scenarios where billions and billions of networked actors, smart devices, intelligent systems, and ecosystems can coexist and cooperate with each other. For such a synergy to be effective, advantageous, and reliable, the participating parties must learn to work together (collaborate) in a trustful manner that brings benefits to all the involved parties. The scientific area of CN focuses on developing concepts, mechanisms, and models that can facilitate understanding and support these challenges in a collaborating environment.
At its current level of development, models, mechanisms, and tools from the CN area have been proposed as promising enablers, and have subsequently been used to address challenges in various domains such as the smart grid [13], Industry 4.0 [14], Society 5.0 [12], internet of things [8], cyber–physical systems and digital twins [15], etc. According to [15], collaboration is known to bring benefits to the involved parties, and so forms the basis and motivation to pursue collaboration in a digitalized and hyperconnected society. As claimed by the same authors in [16], collaboration is a process by which a set of entities strengthen their mutual capabilities. The process entails the participants’ mutual participation in jointly addressing a problem using a collective approach. Collaboration also helps to improve an organization’s ability to compete with other similar organizations or groupings. Additionally, it can improve the ability of the involved entities to survive turbulent times.
2.2. Overview of Related Works
From a literature analysis, it can be seen that several studies already apply the DT concept in the context of smart building [17] and building automation [18]. Smart buildings, according to [17], are buildings that exhibit increased energy performance while simultaneously ensuring that the indoor living conditions or thermal comfort of the occupants are maintained or improved. In this context, a “digital twin” of a smart building should be able to provide a virtual representation of the actual building behavior in real time and support simulations that take into account aspects such as air quality and energy efficiency. In line with this background, a framework that helps monitor energy use and building performance was discussed in [17,19]. For instance, the TwinERGY concept was introduced in [20], in which intelligent digital twins are adopted for the optimization of demand response of residential buildings. The aim is to also ensure the well-being of the building’s occupants. In the context of smart cities, and as cited in related studies such as [21,22], DTs are used to forecast energy demand and consumption in buildings. On a much larger scale, [23] describes the Rinascimento III neighborhood project in Rome. This neighborhood consists of 16 eight-story buildings comprising 216 apartments. The study uses artificial intelligence/machine learning and digital twin techniques to explore ways and possibilities to create an intelligent optimization and automation system to manage different energy-efficient intervention scenarios. Other works in the context of buildings found in the literature include [24], where the DT concept for conducting energy audits in households is discussed. Energy performance certification using digital twin technology is discussed in [25]. From another perspective, the DT concept has also been adopted for the purpose of managing intelligent buildings as discussed in [26,27]. A cybersecurity DT application for monitoring residential energy storage systems using a cloud-based energy management system is also introduced in [28].
Considering its application in related domains other than households, it has been found that the digital twin concept is used for energy management, for instance, in the manufacturing sector of Industry 4.0 [29]. The digital twin of a lithium-ion battery system, which has the capability to enhance the situational awareness of battery management systems and facilitate the optimal functioning of the battery storage system is discussed in [30,31]. In [31] it is stated that an accurate evaluation of a battery’s state of charge can indicate its condition, offer vital information for maintenance and extend the battery’s service life. The digital twin of an office building and data center complex is also addressed in [32]. The digital twin is adopted for energy measurement and prediction of building energy consumption using artificial neural networks. The integration of IoT, artificial intelligence and digital twins for energy management of a smart campus is discussed in [33].
However, despite the mentioned examples, the exploitation of collaborative facets together with digital twins is still in its infancy.
3. Conceptual Background
3.1. The CVPP-E Concept
A CVPP-E can be perceived as a business ecosystem [34] that involves prosumers who own roof-mounted photovoltaic systems and can consume locally generated energy and may store or share their surplus with other members who are identified as consumers. Membership in such ecosystems is motivated by common goals, which might include sustainability, economic, social, or technological goals. Although the synergy of the ecosystem is based on some common goal(s), the notion of collaboration enables individual members to contribute flexibly to the achievement of these goals without having to compromise heavily on their needs, preferences, priorities, objectives, and expectations. Furthermore, from the lens of collaborative networks, the CVPP-E concept can be perceived as a virtual organization breeding environment (VBE) that creates the enabling conditions (preparedness) for a subset of its members (a virtual organization) to pursue a collective objective when an opportunity is found.
Conceptually, the CVPP-E is constituted of two major layers as shown in Figure 1. The first layer is the cyber/collaborative layer and is composed of (1) the CVPP-E manager, and (2) the digital twins of the physical households that are located within the ecosystem, hereby referred to as cognitive household digital twins (CHDTs). The second layer is known as the physical layer which is composed of (1) the aggregation of physical household appliances, (2) the community energy storage system, (3) energy sources (e.g., photovoltaic), and (4) the power grid. The governing structure of the CVPP-E is suggested to be polycentric and decentralized, with a manager who plays coordination, opportunity brokerage, and administration roles.
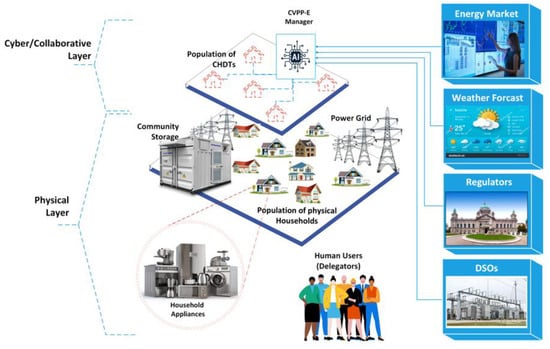
Figure 1.
A high-level view of the CVPP-E framework.
3.2. The CHDT Concept
A digital twin is a virtual model created to reflect a physical object in cyberspace [35]. The object may include a variety of sensors, which produce data regarding various aspects of the performance of the physical object, including energy output, temperature, and weather conditions, among others. This establishes a connection between the DT and its physical counterpart. Once the virtual model is fed with data, it can be used to run simulations, investigate performance issues, and generate potential improvements, all to gain valuable insights that can then be applied to the original physical object. Assuming that the physical object, besides sensing, can also receive commands to perform actions in its environment, the digital twin can also be used to control the object.
In line with these features of digital twins, we propose the cognitive household digital twin (CHDT) concept. As such, we represent each unit of household within the REC ecosystem by its replica in the form of a digital twin counterpart within cyberspace.
In the developed prototype, each CHDT is modeled as a software agent that mimics the actual household’s traits and actions. These software agents are designed to live and interact with each other within a digital REC environment, namely the CVPP-E. CHDTs are also designed to possess some cognitive capabilities, allowing them to serve as complementary decision-making agents on behalf of their physical counterparts. These software agents can make rational and autonomous decisions on their owners’ behalf (owners of the physical households). In Figure 2, the logical structure of the CHDT is shown. This includes: (1) a cognitive block, (2) a decision block, (3) a control block, and (4) an influence block. Key aspects of the CHDTs model are discussed in subsequent paragraphs.
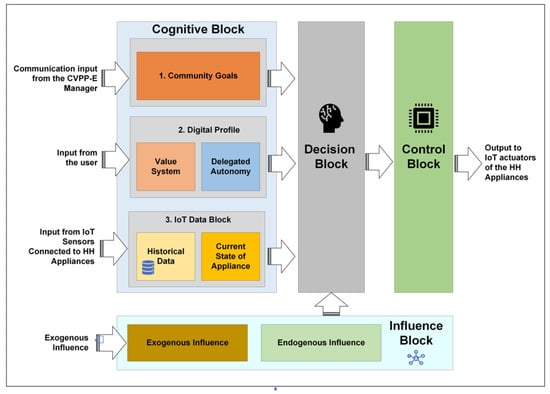
Figure 2.
A logical structure of a CHDT.
3.2.1. The Cognitive Block
This component is used to represent the intelligent aspect of the CHDT. This block enables the CHDT to be cognizant of the following: (1) the community goal(s); (2) the digital profile, constituted of (a) the value system of the physical twin, and (b) the delegated autonomy of the physical twin assigned to the CHDT; and (3) the IoT data block, constituted of (a) the historic data, and (b) the current states of embedded appliances.
- ▪
- Community goals: As mentioned earlier, the focus of the CVPP-E is usually to achieve some specific global goals(s) which are common to all members of the ecosystem. Technically, the community could pursue several goals simultaneously. For instance, the community could pursue a sustainability goal, an economic goal, a social goal, or a technological goal simultaneously.
- ▪
- Value system: A value system in this context represents the preferences, choices, and options of the physical household that have been transferred to its equivalent CHDT. In our prototype, the value system of a CHDT is a list of preferences that represent the values of the owner. This informs the kind of choices and decisions that the CHDT makes. Technically, the value system of individuals may differ from one person to another, therefore, the notion of a value system enables members of the ecosystem to flexibly pursue their expectations and preferences in line with the collective objectives of the ecosystem without having to adversely compromise.
- ▪
- Delegated autonomy: The notion of delegated autonomy is the specific instruction that a household owner gives to its CHDT to be followed in carrying out or executing its value system. In the implemented prototype, this may include the delegation of control over a single appliance or a set of appliances. For instance, deferring the use of any of these appliances until a later time, if needed, without affecting the quality of service to the user. Further information about delegated autonomy is provided in Section 6.2.
3.2.2. The Decision Block
This block forms the central decision-making component of the CHDT. It is the component where all CHDT decisions are made. The community goals block, the digital profile block, the IoT data block, and the influence block are all sources of input for the decision block. A thorough explanation of the decision-making procedures used by the decision block is given in [8].
3.2.3. The Control Block
This block connects the CHDT to each of the embedded household appliances. The decision block’s output is accepted as input by the control block, and the control block’s output serves as input to actuators that are connected to each of the appliances (lately smart appliances). At this stage of the work, basic control of the appliances, such as switching between the “on” and “off” states, is the focus. Other complex control mechanisms might be explored in the future. For instance, in scenarios that involve complex operations, such as controlling thermal comfort by monitoring and modifying room temperature or employing CHDTs in demand response techniques such as “load interruptions”, may require a more complex control mechanism.
3.2.4. The Influence Block
The motivation for people to change behaviors can be achieved by giving some form of incentive to help influence the expected change. According to [36], “incentive” refers to the process of modifying external conditions while mobilizing internal forces to help a motivated person’s behavior evolve in the way the motivator intends. An incentive can either be positive or negative. Positive incentives are often rewarding and could have a positive influence on the recipients because they can help boost productivity since people naturally want to acquire things. Similarly, a negative incentive can influence the recipient to enhance productivity by making the person not want a specific outcome. In the context of energy conservation, various incentive schemes [37] have been proposed to help alter energy consumption behaviors in households. In the context of the CVPP-E, the influence block is used to model scenarios that can help to understand how incentives can influence decision-making. Two components of this block are:
- ▪
- Exogenous influence: which represents influences that result from incentives that originate from the external environment of a CHDT. This may constitute, for instance, an influence from the manager.
- ▪
- Endogenous influence: The type of influence that results from internal motivation or factors. The origin is usually from inside of a CHDT.
3.3. The CVPP-E and CHDT in the Context of a Smart City
The CVPP-E concept can also be extended to the context of a smart city. The CVPP-E could be a digital twin representing the top layer of the city which, in terms of digital twin technology, can be referred to as a process twin [35]. The middle layer may be constituted by the households that are located within the smart city. In the context of digital twin technology, the middle layer can be referred to as unit twins [35]. The bottom layer constitutes the Asset Twins which may include the household appliances or energy assets that are located inside the households [35]. To facilitate a seamless exchange of information (data) between all layers of the digital twins, IoT components such as sensors and actuators, or even complex devices/machines, can be integrated into the asset twins for data collection and control purposes. The collected data can be transmitted to the digital twins located in the digital twin environment where the digital twins are hosted. Figure 3 illustrates the mentioned layers.
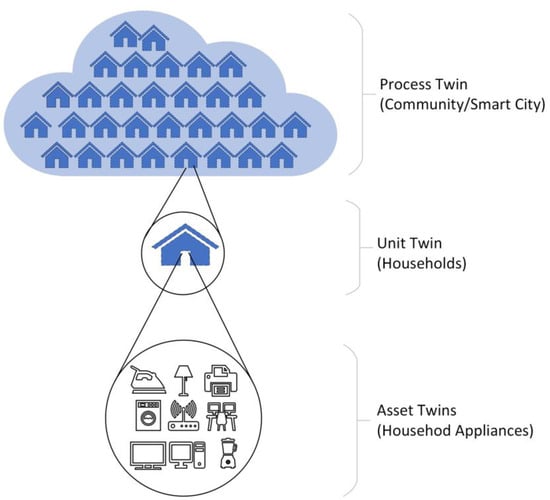
Figure 3.
The three layers of CVPP-E in the context of digital twins and smart city.
4. The Modelling Methodology
As claimed in a recent white paper [38] simulation and modeling were historically based on a single method. This approach had severe limitations because modeling complex systems and the interactions between their components requires different functionalities. Therefore, to create an adequate model, an understanding of how the system is organized in the real world and how it can accurately be represented as a model is highly essential [39]. Due to the limitations and trade-offs associated with single-method simulations, several researchers, such as [26,40] have suggested a multi-method simulation approach as a plausible solution, although this approach may also have its own weakness, as its usefulness may depend on a particular system and the goals of the model. According to [41], a multi-method simulation is defined as a simulation/modeling approach that combines two or more simulation techniques into one. In [42], the authors further claim that this approach has experienced near-exponential growth in terms of popularity, over the last two decades. The advantage of seamless integration of different modeling and simulation methods helps to overcome the drawbacks of a single modeling method and it enables the modeler to harness the strengths of each method. Combining different methods leads to efficient and manageable models without using workarounds. According to [43], three major simulation methodologies are often integrated to yield a multi-method model, namely: (1) system dynamics, (2) multi-agent systems, and (3) discrete event modelling. In this study, the Anylogic platform was adopted, which supports the methods mentioned. However, several other tools such as NetLogo, Adaptive modeler, Jade, AgentScript, etc. could also be considered alternatively.
4.1. System Dynamics
System dynamics suggest that the characteristic behavior of a system is affected by the interplay among its elements and their interaction with the environment. Furthermore, these elements are found to influence each other in a complex and dynamic environment over time. This modeling technique is often used to analyze the complex and non-linear processes and synergy that exist between several elements. According to [43] system dynamics allows the integration of multiple perspectives of a complex and dynamic system into a software model for easy analysis. It can reduce complex problems constituting numerous variables or factors into a simple and dynamic process by adopting a framework that utilizes modeling blocks such as stocks, feedback, flows, delays, etc.
4.2. Agent-Based Systems
Multi-agent system (MAS) technology, on the other hand, has gained immense popularity over the past decade due to its adaptable use in numerous emerging domains, such as artificial intelligence, distributed computing, software engineering, the smart grid, electronic commerce, adaptive virtual environments, and social networks [5]. MAS has been utilized effectively to solve a wide variety of problems spanning numerous disciplines. According to [44,45], MAS can be the basis for a simulation technique for modeling autonomous, dynamic, and adaptive systems that are founded on three fundamental concepts: agency, dynamics, and structure. Agency implies that agents are autonomous entities with distinct properties, behavior, and potentially goal-seeking. Dynamics refers to the development, transformation, and evolution of both agents and their environment. Structure emerges from the interaction of agents. Agents inhabit an environment, perceive it, and determine what action to take at a given time based on the environment’s current state, their own state, and predefined decision rules. Agents can have explicit objectives to minimize or maximize, as well as the ability to learn and adapt based on their experience. Due to their autonomous capabilities, agents can be modeled to possess cognitive and intelligent attributes which enable them to perform tasks such as sensing, planning, scheduling, reasoning, and decision-making.
4.3. Discrete Event Modeling
Discrete event systems (DES) are discrete-state and event-driven systems in which the state changes depend entirely on the occurrence of discrete events over time. Examples of discrete- event systems include manufacturing systems, transportation systems such as urban traffic networks, service systems such as hospitals, communication systems such as wireless networks, etc. Discrete event modeling techniques are useful for process modeling. Processes involving queueing, scheduling, priorities, delays, seizing a resource, releasing a resource, etc., can be modeled in an efficient manner using this modeling technique. An example of a simulation environment that combines the three modelling approaches (multi-method or hybrid) is the AnyLogic simulation platform [46]. This simulation tool was adopted in developing the prototype model that is used for this study.
5. Validation of the Model
Validation is typically defined as a process that ensures or instills confidence that the creation of a new system, artifact, model, or framework has accounted for all significant aspects of a specified problem for which the creation is intended to solve. In the context of the design science research method, validation is accomplished by constructing one or more artifacts that solve a domain problem in order to generate knowledge about how the problem can be solved and demonstrate how the solution is novel or superior to previous solutions. When it is not feasible to do validation in the real world, e.g., with a real energy community, due to the resources required and the long time it would take, simulation can be used in combination with the collection of feedback from focus groups. As such, we adopted this approach to solicit users’ confidence and also to attempt to measure or quantify the perceived practicability and suitability of the proposed CVPP-E/CHDT concepts for their intended purposes. Thus, data were collected from three different groups, constituting (a) potential users, (b) professional interest group 1, and (c) professional interest group 2. Three separate events were organized at three different locations on three different dates in Ghana to help validate the model. Details of the various groups and the corresponding events are provided below.
Potential User Group. This group constituted representatives from nine households who have installed photovoltaic systems of different capacities on their respective residences. They were selected on a random basis. Invitation letters were sent to a total of 15 households, of which nine responded and successfully made it to the validating event. This group showed great interest in the CVPP-E/CHDT because they had practically experienced the benefits of renewable energy and were interested in learning more about a system that could enhance their user experience and benefits. This group, for the most part, did not have any technical knowledge of energy management. They happened to invest in photovoltaic systems to overcome the unreliable nature of the power supply and also to help curb the rising cost of energy.
Professional Interest Group 1. This group is made up of professionals from Ghana’s energy sector. The group was mainly composed of employees from the Volta River Authority of Ghana (VRA) the Electricity Company of Ghana (ECG), and the Bui Power Authority. This was the largest focus group and consisted of 14 members. This group is considered an interest group because their work ethics and social responsibility mandate them to promote sustainable energy consumption in households and within their local communities. They also showed immense interest in the CVPP-E/CHDT concepts. The contributions of this group were skewed towards the technical aspects of the study, particularly from the energy point of view. They also showed great interest in the concept of collaboration mechanisms as an energy management technique.
Professional Interest Group 2. This group consists of academic staff from the Regional Centre of Energy and Environmental Sustainability (RCEES), which is a leading internationally accredited center of excellence providing quality research and postgraduate education in energy and environmental sustainability. Present at the event were two professors, two PhD holders, and four young PhD researchers. The contribution from this group was rich with several constructive suggestions. Some concerns were raised regarding technical validation. However, it was agreed that for such novel ideas, finding the right data for benchmarking purposes was difficult, and therefore other alternative validation approaches, such as the adopted ones, should be acceptable. They also showed great interest in agent-based simulation and the possibility of future collaboration.
5.1. The Validation Processes
The first part consisted of a 20-min presentation that described the overview and background concepts and knowledge. The second part involved a 30-min demonstration of the CVPP-E/CHDT model. The demonstration covered the various components of the model and the modelling techniques that were adopted. A few selected collaborative scenarios were also demonstrated. The third part consisted of a 30-min question and discussion period, which, in all three events, exceeded 30 min due to the interest that the ideas generated among the participants. After the discussion, questionnaires were distributed, one per participant. The questionnaire was based on a 5-point Likert scale that ranged from “strongly disagree”, having a weight of “1” to “strongly agree” having a weight of “5”. As shown in Table 1, the questionnaires sought to measure eight major constructs. Each construct was further broken down into a few dimensions, totaling 28 dimensions. The definition of each construct and the related dimensions are provided in Table 1. A modified version of The Unified Theory of Acceptance and Use of Technology model (UTAUT) [47] was adopted as a guide in developing these constructs and dimensions.

Table 1.
Definition of the various constructs and their related dimensions.
The Validation Analysis. A total of thirty-one responses were collected from the participants from all three validation events. The data from the respondents and the corresponding analysis are described in the following paragraphs. The Cronbach alpha technique [48] is used to test the internal consistency/reliability of the collected data. The SPSS statistical tool [49] is used for data analysis. The overall Cronbach alpha for all eight constructs was found to be 0.866. This value represents an acceptable internal consistency and is an indication that the measuring instrument (questionnaire) is reliable, and its outcome can be trusted.
5.2. The Conclusion of Validation
After a careful analysis of the data, which were collected from the respondents, we arrived at an overall conclusion from the study which is shown in Table 2. In the table, the average scores are either rounded up or down to correspond to one of the points on the Likert scale. For instance, the average score for PE1 is 4.55. This is rounded up to 5.0, which corresponds to “Strongly agree” on the Likert scale. Similarly, PE2 is rounded down to 4.0 which corresponds to “Agree” on the Likert scale. The general conclusion for the study is that the respondents agreed to all eight of the constructs and 28 dimensions of the CVPP-E/CHDT model. This can be interpreted as a unanimous acceptance of the fact that the developed model/artifact is fit for its intended purpose.
Table 2.
Conclusion drawn from the data which were collected from the respondents.
In Figure 4a–c, we use Radar graphs to compare the results of three of the eight constructs. For instance, in Figure 4a, Performance Expectancy 1 (PE1), which is the measure of potential users’ perceptions that CVPP-E/CHDT can help them to manage their household energy consumption more effectively, obtained the highest score of 4.55 out of 5. In Figure 4b, Effort Expectancy 3 (EE3), which is the measure of ease of adaptation, obtained the highest score under Effort Expectancy. In Figure 4c, Co2 is the measure of potential users’ willingness to try collaborative mechanisms as management techniques for sustainable energy consumption.
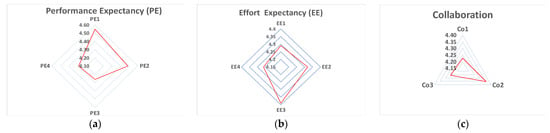
Figure 4.
(a) Performance Expectancy, (b) Effort Expectancy and (c) Collaboration.
The following are some observed limitations to the validation process.
- ▪
- Limited number of photovoltaic system users: Although nine of the respondents had practical experience using photovoltaic systems, the researchers would have preferred to have a much higher number than this. This could have helped by providing more diverse and practical feedback from the potential user group.
- ▪
- Validation from the collaborative networks community: The validation from this community was primarily based on feedback from peer-reviewed journal publications and international conferences. Although this feedback was very constructive and useful, it addressed different sections of the model. The authors believe the experience could have been richer if the community had the opportunity to experience the practical demonstration of the complete model. This could have helped to generate interesting discussions concerning the collaborative aspects of the model.
- ▪
- Geographical distribution: Sustainability and issues concerning sustainable energy consumption, although “universal”, may be perceived and approached differently by different people from different geographical regions. The researchers have the view that having the demonstration in different geographic regions (countries) could have also enriched the outcome, although we do not expect a significant variation in the outcome.
- ▪
- Data sources: The data that were used to model the various households in the model were sourced from the United Kingdom (UK). The authors share the view that perhaps the system should also be verified using other data sources since the use-behaviors of households in Ghana for instance may be different from those of the UK.
These limitations will be addressed in future work.
6. Simulation Models of the Collaborative Behaviors
This section of the study is focused on addressing and discussing research questions 1 and 2. Section 6.1 discusses research question 1a (the collaborative roles played by the CVPP-E manager), and Section 6.2 discusses research question 1b (the collaborative roles or behaviors played by CHDTs). Section 6.3 also discusses research question 2 (the sharing of a common resource). The sections show details of the simulation models that are used to represent the CVPP-E and CHDT and are intended to be used in answering the stated research questions. Additionally, to facilitate the discussion and help answer the research questions, the concepts of “community goals”, “value system”, and “preconditions for goal formulation”, are introduced and also discussed. Details of this simulation model are provided in the Supplementary Materials File S1. The material contains an ODD (Overview, Design Concepts, and Details) report for the model.
- (a)
- Typically, a CVPP-E may pursue multiple goals simultaneously. However, for illustration purposes, in this work we discuss a scenario where the CVPP-E pursues two community goals concurrently. For example, these two goals may constitute community goal 1: A vending opportunity (VendOpp) and community goal 2: A grid management opportunity. Goal 1 describes the case where the community finds an opportunity to vend energy to the grid. For this goal, it is assumed that the following three preconditions must be satisfied before it can be pursued:external demand for energy by the grid. This precondition can be represented as “precondition-1A”;
- (b)
- surplus generation of renewable energy available in the community. This precondition can be represented as “precondition-1B”, and
- (c)
- a high population of CHDTs having “vendOpp” as their value system, also denoted as “precondition-1C”.
Concerning goal 2, we consider the case where the community uses the control of its assets such as washing machines, dishwashers and clothes dryers to contribute to grid management by helping to reduce consumption from the grid during peak periods. These assets are often referred to as deferrable loads. The nature of these assets is that their use can always be deferred to a later time without affecting the quality of service to the user. Some examples that could be considered as preconditions for this goal may include:
- (a)
- Peak demand on the grid—This can represent a period that is daily, annual, or seasonal, when demand for energy is significantly higher than average supply levels and could jeopardize the stability of the power grid. Under such circumstances, one of the conditions available to the grid operators is to implement some demand response actions such as encouraging voluntary reduction in energy consumption for the period. This precondition can be represented as precondition-2A;
- (b)
- A high population of delegated CHDTs with grid management as their value system, also represented as precondition-2B;
- (c)
- The minimum energy savings required by the grid operator as contribution to grid stabilization can be met by the collective action of the community. This could also be named as precondition-2C;
For a goal to be pursued, all three preconditions relating to that goal must be satisfied.
The models that are used to simulate these goals are constituted by several components that are integrated to help each software agent to perform their various collaborative roles. In the following paragraphs, an overview of the “integrated model” is first presented, then, subsequently, the components of the integrated model are discussed individually in more detail. The shown models and their related components were all developed using either agent-based, system-dynamics, or discrete event modeling techniques. The following scenario is used to simulate the behaviors:
- The size of the CHDT population in the model = 100.
- Percentage of delegated CHDTs is approximately 50% of the population.
- Goals pursued simultaneously = 2.
- The minimum number of goals that can be accepted by a CHDT = 0.
- The maximum number of goals that can be accepted by a CHDT = 2.
- Minimum VO formation threshold (this refers to the minimum number of accepted invitations that makes the formation of a VO a viable venture) = 25% of the population.
- Simulation period = 5 h.
- Each household is embedded with nine household appliances. These are (a) washing machine, (b) tumble dryer, (c) dishwasher, (d) audiovisuals, (e) microwave, (f) electric cooker (g) lighting, (h) refrigerator and (h) oven. The CHDT households in the model are categorized into five groups. These include (a) CHDT with single pensioner, (b) CHDT with single non-pensioner, (c) CHDT with multiple pensioners, (d) CHDT with children and (e) CHDT with multiple persons with no dependent children. The CHDT/household categorization and data that were used to model these appliances were obtained from [50].
6.1. Modelling Collaborative Roles/Behaviors of the CVPP-E Manager
The integrated model of the CVPP-E manager. The integrated model of the manager is shown in Figure 5. It is constituted of six components that work together to model the various collaborative roles played by the manager. The considered components are: (1) the opportunity seeking/goal condition for goal 1 components, (2) the opportunity seeking/goal condition for goal 2 components, (3) the goal formation component, (4) the goal proposition and invitation component, (5) the VO formation/dissolution for goal 1, and (6) the VO formation/dissolution for goal 2 components.
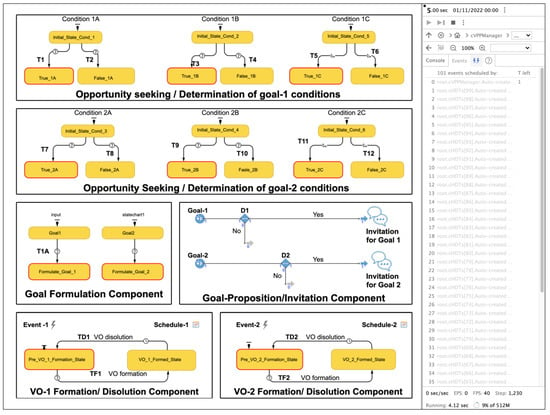
Figure 5.
Illustration of the integrated model of the CVPP-E manager.
Opportunity Seeking / Determination of Goal Conditions for Goals 1 and 2 Components. The types and number of goals to be pursued at any time are often determined by the manager. The manager may gather inputs from several sources to determine the prospects of a goal. For instance, the ecosystem manager may consult sources such as weather forecasting systems, distribution services operators, the energy market, the value systems of CHDTs etc., to determine whether the preconditions for the formulation of a specific goal can be met. If these preconditions are met, it can be inferred that an opportunity has been found. According to [51] an opportunity is a situation or condition that is favorable for the attainment of a goal. Once an opportunity is found, the manager formulates the goal and proceeds to invite members of the community towards the formation of a temporary coalition or virtual organization (VO) to pursue the found opportunity. The coalition that is formed can then be dissolved after the opportunity has been pursued.
The model component that is used to simulate “opportunity seeking” or “determination of goal preconditions” by the manager is shown in Figure 6a,b. Agent-based techniques are adopted to simulate the precondition for goals 1 and 2. The figure shows six preconditions for each goal. T1 to T12 are stochastic transitions that enable each precondition to transition between two states, i.e., the true/active, and false/inactive states for every model iteration. The probability of transitioning between the active and inactive states is 50% for each precondition. Referring to Figure 6a, each precondition can exist in only one of two states at a time: thus, the “true/active state” or the “false/inactive state.” The active state is used to represent the prevailing precondition while the inactive state represents the dormant precondition. The case illustrated in Figure 6a shows that all three preconditions (1A, 1B, and 1C) representing goal 1, and all three preconditions (2A, 2B and 2C) representing goal 2 are in the true/active state, implying that they are prevailing preconditions for goals 1 and 2 respectively. Therefore, it can be inferred that all preconditions for both goals are satisfied and thus, goals 1 and 2 can be formulated and subsequently pursued.
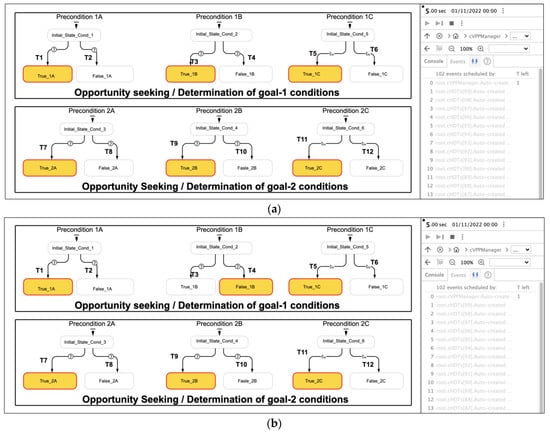
Figure 6.
(a) All three preconditions for community goals 1 and 2 are satisfied. Both community goals are formulated and pursued concurrently. (b) All three preconditions for community goal 2 are satisfied. Only two preconditions for community goal 1 are satisfied. Goal 2 will be formulated but goal 1 will not.
On the contrary, in the case illustrated in Figure 6b, we have a different situation where precondition 1B is in the false/inactive or dormant state. However, preconditions 1A and 1C are in the true/active or prevailing state. Similarly, considering goal 2 (Figure 6b) it can be observed that goal 2A, 2B and 2C are all in the true/active or dormant state. The implication for this scenario (Figure 6b) is that goal 1 cannot be formulated and pursued however, goal 2 can be formulated and subsequently pursued because all of its three preconditions are satisfied.
Goal formulation components. The outcome of the opportunity seeking/goal condition explained using Figure 6a,b may either lead to the formulation of a community goal or otherwise.
The formulation of goals, by the manager, is very essential in the ecosystem as it forms the basis for the notion of a “common goal.” This is because, anytime a community goal is formulated or revised at the level of the manager, it is replicated or duplicated within each CHDT so that they can be cognizant of the active or prevailing community goal(s) and can make decisions based on these prevailing goal(s). In Figure 7, TG1 and TG2 are conditional transitions that are used to monitor the condition for the formulation of goals. Transition TG1 is used to check the conditions for the formulation of goal 1, i.e., If precondition 1A is true, and precondition 1B is true, and precondition 1C is true, then formulate goal 1. Similarly, Transition TG2 is used to monitor the condition for the formulation of goal 2, i.e., If precondition 2A is true and precondition 2B is true and precondition 2C is true, then formulate goal 2.
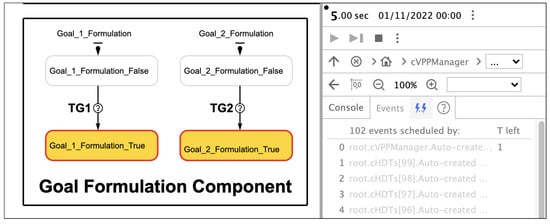
Figure 7.
Goal formulation component illustrating the formation of goals 1 and 2.
Goal proposition/invitation component. Once an opportunity has been found and a goal has been formulated, the CVPP-E manager proceeds to invite CHDTs to form a coalition in pursuance of the specified goal(s). The invitation is broadcast to the CHDTs in the form of a message. In AnyLogic, agents living in a common environment can communicate with each other using built-in messaging functionality. This mechanism allows the sending of a message from a single source (one software agent) to multiple destinations (several software agents). Figure 8 shows a discrete event component of the model that is used to broadcast messages from the manager to all CHDTs. The decision blocks D1 and D2 in this figure are used to check if goals 1 or 2 have respectively been formulated. If the condition returns true, a message symbolizing an invitation is broadcast to all CHDTs in the environment. Otherwise, no message will be broadcast. In all discrete event models, such as the one shown in Figure 8, the label “1” that is found near each modeling block indicates the “true” condition and the label “0 “signifies the “false” condition. Referring to Figure 6 above, it is observed that goal(s) 1 and 2 were formulated. Therefore, D1 and D2 return “true” for both for goals 1 and 2.
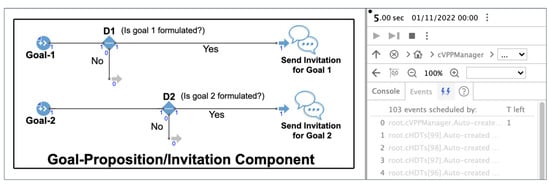
Figure 8.
A discrete event component that is used to broadcast invitations of goals 1 and 2 to the community.
Invitation acceptance or decline. This aspect of the process is performed by individual CHDTs. It is, therefore, discussed in detail in Section 5.2 where the roles of the CHDTs are discussed. In the subsequent paragraphs, we discuss VO formation and dissolution based on the premise that the CHDTs have received the invitations and responded accordingly. A summary of the responses to both invitations during simulation is illustrated in Figure 9.
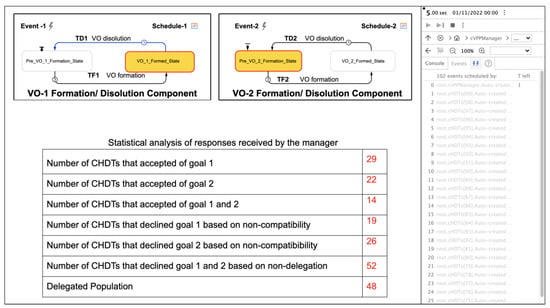
Figure 9.
VO formation, dissolution, and statistical analysis component.
Virtual Organization (VO) formation or dissolution. The VO formation and dissolution processes are performed by the CVPP-E manager after it has received various responses from the CHDTs. The manager uses a threshold that is called the “minimum VO formation threshold” to make VO formation decisions. Several factors can be used to determine the VO formation threshold. In this work, the threshold was set based on a minimum percentage of the population that accepted an invitation to a particular goal. We considered a minimum of 25% of the population, thus 25% of 100 CHDTs, which equals 25 CHDTs. This means that for each goal, a minimum of 25 CHDTs must accept the invitation before a VO can be formed. Alternatively, a VO can also be formed in terms of the quantity of energy, thus, the minimum quantity of energy that can be aggregated based on the responses received from the various CHDTs.
In Figure 9, we illustrate the techniques and principles that are used for VO formation. This figure shows two components of the model that are used to represent a VO for goal 1 and a VO for goal 2. Each component of the model includes two possible states, thus, (1) pre-VO formation state and (2) VO formed state. The pre-VO formation state is the default state of the component while the “VO formed state” represents the state when a VO has been formed. When a VO is formed, the component remains in the “VO formed” state for the entire lifecycle of the VO. When the VO is dissolved, the component returns to the pre-VO formation state. The transition from the “pre-VO formation state” to the “VO formed state” is triggered by transitions TF1 for goal 1 and TF2 for goal 2. TF1 and TF2 are conditional transitions that check the minimum threshold and are triggered when the threshold is met or exceeded. Transitions TD1 and TD2 are used to dissolve VO 1 and VO 2 respectively after the corresponding goal has been executed. Event 1 and event 2 are used to trigger the start and finish of both goal 1 and 2 respectively. Schedule 1 and schedule 2 are used to schedule the waiting time before the commencement of goals 1 and 2 respectively.
As can be seen in the statistical analysis in Figure 9, the number of CHDTs that accepted goal 1 is 29 out of 100 CHDTs, and the number that accepted goal 2 is 22 out of 100. Furthermore, 14 CHDTs accepted both goals 1 and 2. It can be observed from these statistical data that the number of CHDTs that accepted goal 1 exceeded the minimum threshold of 25 CHDTs. For this case, it can be seen in Figure 9 that VO 1 is formed to pursue goal 1. On the contrary, the number of CHDTs that accepted goal 2 is 22, which is less than the threshold of 25 CHDTs, therefore, VO 2 is not formed.
6.2. Modelling Collaborative Behaviors of the CHDTs
The integrated model of the CHDT. The integrated model of the CHDT is illustrated in Figure 10. Each of the CHDTs in the ecosystem is designed according to this model. The integrated model is constituted by the components that are used by the CHDTs to participate in collaborations. The integrated model comprises the following components: (1) the community goal component, (2) the value system component, (3) the delegation components, (4) the decision-making components for goals 1 and 2, and (5) the delegated autonomy component. In the subsequent paragraph, each component and their functionality are discussed in detail.
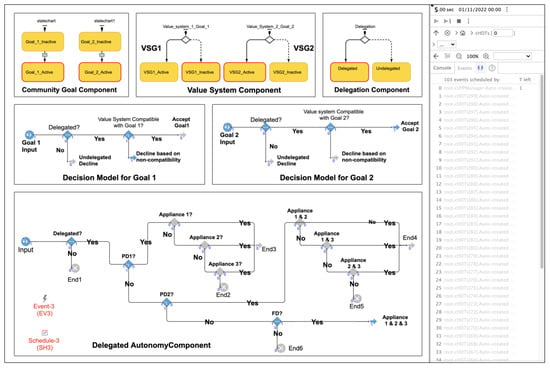
Figure 10.
The integrated model of the CHDT.
Community goals component. In Figure 11, we show an extract of CHDT number 36 that illustrates how the community goal, which is originally formulated by the CVPP-E manager, at the upper level of the model (shown in Figure 7), is replicated at the CHDT level. Any time the community goal changes at the upper level, the change is replicated in the equivalent component that is embedded inside the CHDTs. This technique helps CHDTs to be cognizant of the prevailing community goal(s). The ability of all CHDTs to be individually cognizant of the community goals and have the capability to make autonomous decisions based on this knowledge fulfills the notion of a “common goal” which is a key prerequisite for collaboration.
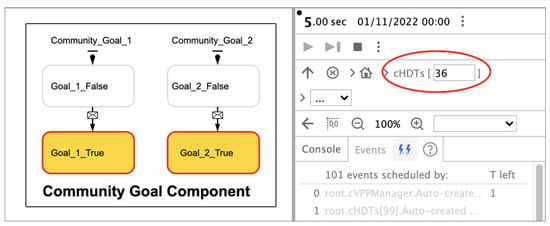
Figure 11.
A replica of the community goal that is replicated inside CHDT number 36.
Value system and community goal compatibility components. Besides the community goal(s), each CHDT has a value system that is used to represent the needs, preferences, priorities, objectives, and expectations of a user. Furthermore, a CHDT may have several value systems to represent several needs, and these could be arranged in hierarchical order to represent different priorities and options. For illustration purposes, in this simulation study, we assume that each CHDT has two value systems, namely (1) value system 1 (VSG1) which corresponds to community goal 1, and (2) value system 2 (VSG2) which corresponds to community goal 2. A value system can be in one active state at a time, either the “true” state or the “false” state of the value system. The true and false states of a value system are modelled using stochastic modelling techniques that give each state a 50% probability of occurrence. This technique helps to simulate different value system scenarios for all the CHDTs in the considered population. A value system that is in the true state implies that it is a prevailing value system for that CHDT, while a value system that is in the false state implies that it is dormant for the related CHDT. When the active state of value system 1 is in the “true” state (prevailing), it can be inferred that it is compatible with community goal 1. In the same way, when the active state of value system 2 is the “true” state (prevailing), it can also be inferred that value system 2 is compatible with community goal 2. However, if any of the active states of the values system is in the “false” state (dormant), that value system can be inferred as being non-compatible with the respective community goals.
As an example, we show three different CHDTs, each with different values systems in Figure 12a–c. In Figure 12a, CHDT 61 has both value system 1 and value system 2 in the false states. This can be interpreted as a CHDT with no prevailing value systems. Similarly, in Figure 12b CHDT 87 has one prevailing and one dormant value systems. As such, it can be assumed that value system 1 of CHDT 87 is compatible with community goal 1. For the same CHDT, the false state for value system 2 means that value system 2 of CHDT 87 is incompatible with community goal 2. Finally, in Figure 12c both value systems 1 and 2 of CHDT 30 are compatible with community goals 1 and 2.
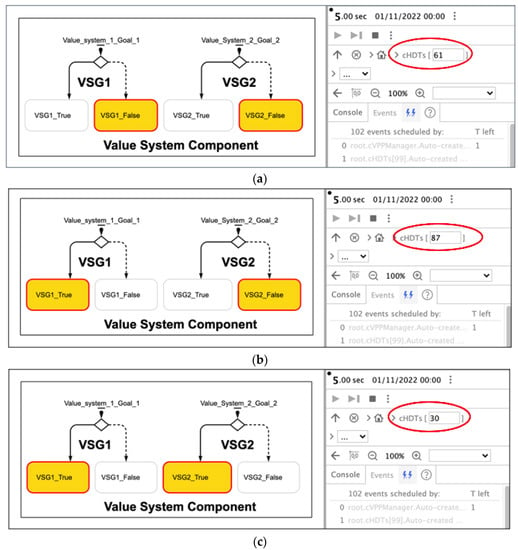
Figure 12.
(a) Example of no prevailing value system. Both value systems are dormant for CHDT 61. (b) Example of one prevailing value system (VSG1) for CHDT 87. (c) Example of two active value systems (VSG1 and VSG2) for CHDT 30.
Delegation components. According to [52], delegation refers to the transfer of responsibility from one entity to another to execute some specific tasks on its behalf. In the context of this study, delegation refers to the process whereby the user or physical twin owner gives authority or responsibility to its CHDT allowing it to act or take some rational decisions on his/her behalf. The component that is used to determine the “delegated” or “undelegated” condition of a CHDT is shown in Figure 13. In this delegation component, only one of the two states can be active at a time. When a CHDT is delegated, the “delegated” state becomes active. On the contrary, if the CHDT is undelegated, the “undelegated” state becomes active. Under the undelegated state, a CHDT is unable to make decisions on behalf of the physical twin and therefore cannot participate in collaborative activities.
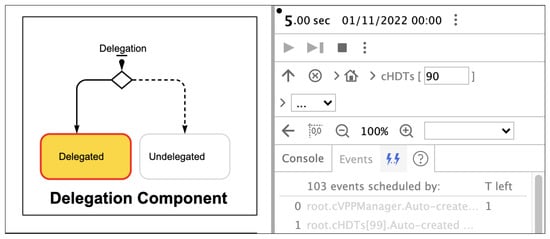
Figure 13.
A delegated CHDT (CHDT 90).
Decision components of the CHDTs. There are two decision-making components that are embedded in each CHDT. These blocks are used to simulate the acceptance or decline of an invitation. The decision component uses discrete event simulation techniques to process these behaviors. One part of the decision component is used to process invitations for goal 1 while the other part is used to process invitations for goal 2. Figure 14a–c are used to illustrate different scenarios of acceptance and decline of invitations broadcast by the manager. Subsequent actions that are taken by the CHDTs after receiving the invitation include (1) checking the “delegated/undelegated” state of the CHDT, and (2) checking the value system and community goal compatibility, and finally (c) acceptance or rejection of the invitation. These steps are explained in detail using Figure 14a–c as a reference.
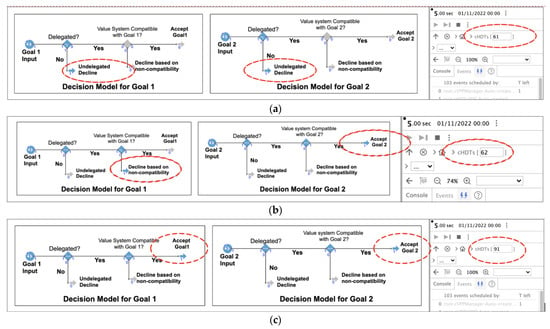
Figure 14.
(a) The decision component shows the “decline” of goals 1 and 2 based on un-delegation. (b) The decision component shows the “decline” of goal 1 based on non-compatibility and acceptance of goal 2. (c) The decision component shows the acceptance of goals 1 and 2.
Checking the delegated state of the CHDT: After receiving an invitation, the CHDT first checks the delegation component to determine whether it is “delegated” or “undelegated.” If in the un-delegated state, the invitation is declined based on “un-delegation”. However, if the CHDT is delegated, the model proceeds to check the value system and community goal compatibility to determine whether to accept or decline the invitation. In Figure 14a, the behavior of CHDT 61 is shown. It can be observed that this CHDT declined the invitations to both goal 1 and goal 2 based on “un-delegation. (The label “1” near each modeling block shows the “true” condition while the label “0” represent the false condition).
Checking the value system and goal compatibility: After checking the delegated condition, if the CHDT is delegated, it proceeds to check the compatibility between the value system and the community goal. If there is no compatibility the CHDT declines the invitation based on non-compatible goals. However, if there is compatibility the CHDT proceeds to accept the invitation. For instance, in Figure 14b the behavior of CHDT 62 is shown. It can be observed that the CHDT declined the invitation to goal 1, based on non-compatibility, however, it accepted invitation to goal 2, based on compatibility. Finally, in Figure 14c, we observe the behavior of CHDT 91 that accepted both invitations to goals 1 and 2 based on delegation and compatibility.
Delegated Autonomy component. As mentioned earlier, delegated autonomy is the specific instruction that a household owner may assign to its CHDT to be followed in carrying out or executing its value system. In this study three appliances were considered for delegated autonomy, namely: (a) washing machine, (b) dishwasher, and (c) clothes/tumble dryer. Furthermore, we assume that delegated autonomy can be executed at three levels: (a) partial delegation for a single appliance (PD1), (b) partial delegation for double appliances (PD2), and (c) Full delegation (FD). PD1 means that the CHDT has the authority to delegate any one of the three appliances. Similarly, PD2 means having the authority to delegate any two of the three appliances, and FD means having the authority to delegate all three appliances.
Although delegated autonomy is reflected as the next step after acceptance of an invitation, this process does not occur immediately. This process is usually scheduled, and the schedule is communicated by the manager. At the level of the manager, schedule-1 is used to schedule goal 1, and event-1 is used to control the start and finish of the goal 1. Likewise, schedule-2 is used to schedule goal 2, and event-2 is used to control the start and finish of goal 2. At the level of the CHDT, schedule-3 and event-3 replicates schedule-1 and event-1 for goal 1, while schedule-4 and event-4 are used to replicate schedules-2 and event-2 for goal 2.
Figure 15 illustrates the delegated autonomy component for CHDT 75. Event-3 is used to trigger the commencement of delegated autonomy. In the process of executing delegated autonomy, the component checks again to confirm if the CHDT is delegated or undelegated. If undelegated, the process is terminated (End1). If delegated, the model checks the condition for PD1. If the PD1 condition is true, the model will delegate either appliance 1, or appliance 2, or appliance 3. If the PD1 condition is false, the model proceeds to check PD2. If the PD2 is true, the component will delegate either appliances 1 and 2, or appliances 1 and 3, or appliances 2 and 3. If the PD2 is false, the model component checks for the FD condition. If the FD is true, the model will delegate all three appliances. In the example of Figure 15, FD is true, therefore all three appliances are delegated.
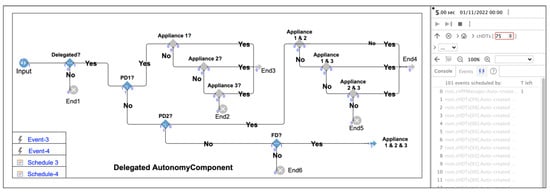
Figure 15.
Implementing delegated autonomy.
6.3. Modelling the Sharing of Common Resources
Collaborative consumption, also known as the sharing economy, has attracted much attention as resource sharing is quickly gaining importance in economic and social life. According to [53] these novel sharing solutions to socioeconomic challenges have the potential to significantly improve the efficient utilization of scarce resources.
In the CVPP-E framework, it is suggested that the ecosystem can possess a centralized and shared energy storage system through which prosumers can share their surplus energy. Consumers and prosumers alike can access this stored energy when needed. This technique can help reduce the reliance on the power grid, helping to promote sustainable consumption within the ecosystem. In this framework, two levels of sharing are discussed, namely: (1) level 1 sharing, which constitutes the sharing of surplus energy from prosumers to the community storage, and (2) level 2 sharing, which constitutes the reverse: a redistribution of energy previously stored in the community storage, back to the community.
Figure 16 shows a system dynamics component of the photovoltaic (PV) and battery storage systems embedded in prosumer CHDTs. The model is constituted of four PV systems, namely DaSS = 3.22 KW, BrainSystem = 6.93 KW, Helious = 3.99 KW, and BainBridge = 1.95 KW. The data corresponding to these PV systems are sourced from [54]. At the model initialization stage, one of the four PV systems is randomly assigned to a prosumer. This helps to diversify the capacities of PV systems in the ecosystem.
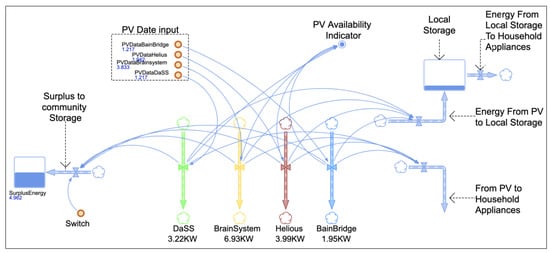
Figure 16.
A model of the four embedded PV systems with the integrated local energy storage system.
For instance, in Figure 17, we show the codes that are used to share surplus energy from a prosumer CHDT with the community storage. The interpretation of the codes is as follows.
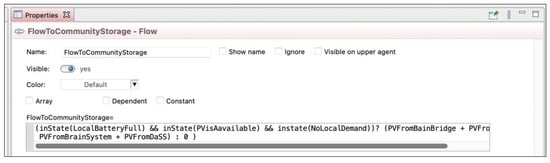
Figure 17.
Codes that facilitate the sharing of surplus energy from the photovoltaic source to the community storage.
- o
- Condition 1A: The code “InState(LocalBatteryFull)?” checks whether the local battery is in the “battery full” state. The “battery full” state is determined by whether the state of charge (SoC) is greater or equal to (≥) 90% of the storage capacity.
- o
- Condition 2A: The code “InState(NoLocalDemand)” checks if there is no local demand.
- o
- Condition 3A: The code “instate (PVisAavailable)” is used to check PV availability.
- o
- Condition 4A: If the checks from conditions 1A, 2A and 3A, return true, then data from one of the four embedded PV systems, depending on which one has already been assigned to the CHDT, will be activated. The active PV system could either be (PVfromBainBridge) or (PVFromHelious) or (PVFromBrainSystem) or (PVFromDaSS). Since only one of these PV systems will be active at a time for a CHDT, data from that PV will flow into the community storage. All inactive PV systems will return zero.
- o
- Condition 5A: If the checks from conditions 1A, 2A and 3A, return false, the output of the expression will be zero, which means no flow occurs.
A model component of the community storage is shown in Figure 18. This model has inputs from the community (prosumer CHDTs) that are used for level 1 sharing. It also has an output back to the community, which is used for level 2 sharing. There is a third output that connects to the grid. The conditions for charging and discharging the batteries are as follows:
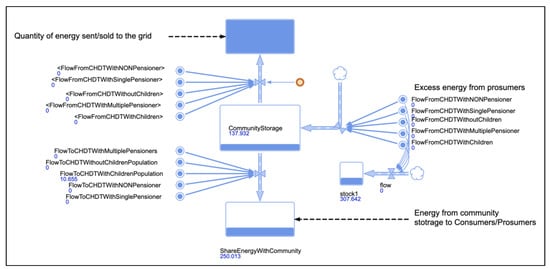
Figure 18.
The community storage system.
Condition for discharging the battery: If state of charge (SoC) community storage is greater than X% of the storage capacity and there is community demand for energy, discharge the battery, or else keep charging.
Condition for charging the battery: If SoC of community storage is less than Y% of the storage capacity, stop discharging the battery and charge, else keep discharging.
In the prototype model X = 90% and Y = 30%.
Furthermore, in Figure 19 we show the codes that are used to charge the community storage and in Figure 20 we show the codes for discharging the storage.
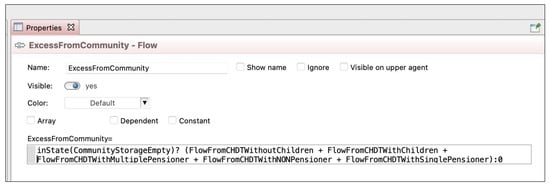
Figure 19.
Codes for sharing excess energy from the community (charging the community storage).
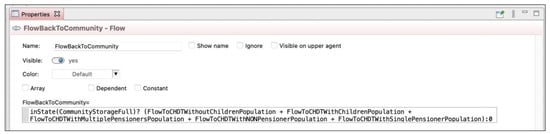
Figure 20.
Codes for sharing energy from community storage with the community (discharging community storage).
Charging: Referring to Figure 19
- ▪
- Condition 1B: The code “InState(CommunityStorageEmpty)?” checks if the community storage is in “battery empty” state. The “battery empty” state is determined by whether the state of charge (SoC) is less or equal to (≤) 30% of the storage capacity.
- ▪
- Condition 2B: If condition 1B returns true, then the following expression: (FlowFromCHDTWithoutChildren + FlowFromCHDTWithChildren + FlowFromCHDTWithMultiplePensioner + FlowFromCHDTWithNONPensioner + FlowFromCHDTWithSinglePensioner) is activated. Where:
- (i)
- FlowFromCHDTWithoutChildren = The sum of flows originating from PVs of all prosumers within the category of household without children.
- (ii)
- FlowFromCHDTWithChildren = The sum of flows originating from the PVs of all prosumers within the category of household with children.
- (iii)
- FlowFromCHDTWithMultiplePensioner = The sum of flows originating from the PVs of all prosumers within the category of household with multiple pensioners.
- (iv)
- FlowFromCHDTWithNONPensioner = The sum of flows originating from the PVs of all prosumers within the category of household with non-pensioner
- (v)
- FlowFromCHDTWithSinglePensioner = The sum of flows originating from the PVs of all prosumers within the category of household with single pensioner.
- ▪
- Condition 3B: If condition 1B returns false, then the expression (FlowFromCHDTWithoutChildren + FlowFromCHDTWithChildren + FlowFromCHDTWithMultiplePensioner + FlowFromCHDTWithNONPensioner + FlowFromCHDTWithSinglePensioner) is equal to zero, which means no flow occurs.
Discharging: referring to Figure 20,
- ▪
- Condition 1C: The code “InState(CommunityStorageFull)?” checks if the community storage is in the “Community battery full” state. The battery full state is determined by whether the state of charge (SoC) is greater or equal to (≥) 90% of the storage capacity.
- ▪
- Condition 2C: If condition 1C returns true, then the expression: (FlowToCHDTWithoutChildrenPopulation + FlowToCHDTWithChildrenPopulation + FlowToCHDTWithMultiplePensionersPopulation + FlowToCHDTWithNONPensionerPopulation + FlowToCHDTWithSinglePensionerPopulation) is executed. Where:
- (i)
- FlowToCHDTWithoutChildrenPopulation = The sum of flow, equivalent to the total demand for energy originating from the category of household without children.
- (ii)
- FlowToCHDTWithChildrenPopulation = The sum of flow, equivalent to the total demand for energy originating from the category of household with children.
- (iii)
- FlowToCHDTWithMultiplePensionersPopulation = The sum of flow, equivalent to the total demand for energy originating from the category of household with multiple pensioners.
- (iv)
- FlowToCHDTWithNONPensionerPopulation = The sum of flow, equivalent to the total demand for energy originating from the category of household with non-pensioner population.
- (v)
- FlowToCHDTWithSinglePensionerPopulation = The sum of flow, equivalent to the total demand for energy originating from the category of household with single pensioner.
- ▪
- Condition 3C: If condition 1C returns false, then the expression (FlowToCHDTWithoutChildrenPopulation + FlowToCHDTWithChildrenPopulation + FlowToCHDTWithMultiplePensionersPopulation + FlowToCHDTWithNONPensionerPopulation + FlowToCHDTWithSinglePensionerPopulation) is equal to zero, which means no flow occurs.
6.4. Limitation of the Simulation Model
Despite the promising results, the developed simulation model has some limitations which need to be addressed in future works:
Limited goal conditions: In this simulation model, we limited the number of goal conditions to three. However, in a typical or real-life situation, there may be several conditions that need to be taken into consideration before a goal can be formulated. For instance, the formulation of a goal that facilitates the vending of energy to the grid may require several factors or conditions that border around power quality (frequency and voltage), tariffs, and contractual conditions between the grid operators, energy market, and community.
Condition for VO formation: In the current implementation, we adopted the technique of threshold as the only condition needed for the formation of a VO. However, in a real-life scenario, the sheer number of accepted invitations may not be sufficient grounds to form a VO. Other technical details may have to be considered. For instance, in the case of exporting energy to the grid, much as the number of accepted invitations may be useful, the contribution from each member may be equally vital. For example, the total contribution expected from all those who accepted invitations must match up to the expected projections of the community manager. Therefore, besides the numbers, other technical details could be useful.
Limited value system: Again, in current implementation it is considered that each CHDT in the model has two value systems, namely VSG1 for value system 1 and VSG2 for value system 2. However, in a practical sense, the number of value systems could be higher.
Overrides: The prototype assumes that, after acceptance, CHDTs would stick to their decisions. However, it is possible that, after acceptance, some users may change their minds and may like to override the system and reverse their initial decisions. In this simulation model, such provisions were not taken into consideration, therefore CHDTs are unable to override their initial decisions.
7. Results and Discussion
In this section, we discuss the result of the simulation model using four different scenarios. In the first scenario, we explore the relationship between delegation, acceptance or decline of an invitation and the subsequent formation of a VO. The second scenario summarizes the outcome of an earlier study that was conducted to demonstrate the notion of delegated autonomy which was mentioned earlier in this study. The third scenario summarizes the outcome of another study that was conducted to demonstrate the notion of mutual influence. The last case, which is resource sharing, is discussed in scenarios 4a and 4b.
7.1. Scenario 1: Illustrating the Relationship between Delegation, Acceptance/Decline Invitation, and VO Formation
Under this scenario, we attempt to explore how the population of delegated CHDTs affects the tendency to accept an invitation and the subsequent formation of a VO. We considered three different cases as shown in Table 3, namely 10%, 50%, and 90% of the delegated population. The total population of CHDTs considered in the ecosystem for this study was 100 and the VO formation threshold was 25, thus 25% of the total population was used. The model was run for 5 h.
Table 3.
Scenario for exploring the relationship between delegation, acceptance of an invitation, and VO formation.
The outcome of this scenario is shown in Table 4, and subsequently in Figure 21. It is observed that, when the percentage of delegated CHDTs is low, the percentage of acceptance of an invitation is equally low. Subsequently, the chances of a VO formation are low. This can be seen in case 1. However, when the population of delegated CHDTs is high, the percentage of the population that is likely to accept the invitation would be high and the chances of a VO formation are equally high, as seen in case 3. At the midpoint, when the population of delegated CHDTs is about 50 percent, the percentage of CHDTs that may accept the invitation is difficult to predict. The reason for this is that almost half of the population is undelegated from the onset. This leaves about 50 percent as delegated. Considering the threshold of 25% of the total population, it might be necessary to have more than half of the delegated population (25 or more) accept the invitation before a VO can be formed. It can therefore be inferred that the chances of a VO formation may depend on two factors: (1) the minimum VO formation threshold and (2) the size of population that is delegated in the ecosystem.
Table 4.
Results of scenario 1 acceptance to initiation for goals 1 and 2, and VO formation.
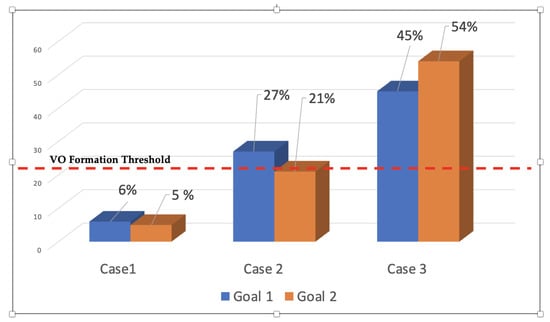
Figure 21.
Relationship between VO formation and population of delegated CHDTs.
In Table 5, the outcome of the model, showing the percentage of CHDTs that declined goals 1 and 2 for all three cases is presented. The results show that having a high percentage of delegated CHDTs may result in fewer declines based on non-delegation. Similarly, a low percentage of the delegated CHDT population also results in a high percentage of decline to invitations based on non-delegation. In terms of goals and value systems compatibility, it is observed that a low population of delegated CHDTs results in few compatibilities while a high population of delegated CHDTs results in many compatibilities.
Table 5.
Results of scenario 1 for decline of invitation to goals 1 and 2.
7.2. Scenario 2: Testing Delegated Autonomy
The collaborative effect of the proposed concepts is seen when the CHDTs make collective decisions. To successfully make such collective decisions each one of them must have cognizance of the flowing conditions: (1) the formation of a VO, (2) the waiting time (schedule of delegated appliances), (3) vending window (duration), and (4) the degree of delegation (delegated autonomy). Using the scenario described in Table 6, the following global behaviors are observed for a population of 100 CHDTs.
Table 6.
Scenarios for testing delegated autonomy, degree of delegation, and VO size.
The outcome in Figure 21a represents case 1. In this case, a VO constituting all the population of CHDTs (100%) is formed. All CHDTs were assigned “full delegation” autonomy. The results, as shown in Figure 22a suggest that all CHDTs were cognizant of the schedule, duration, and delegated autonomy. It can be observed that all CHDTs took collective action by implementing their delegated autonomy. This results in zero consumption within the “vending window”. The reason is that all CHDTS deferred the use of all three deferrable appliances when the waiting time (schedule) was due, and the deferral lasted for the duration of the vending window. Consumption was restored immediately after the period of deferral was over, thus, they all resumed consumption immediately after the vending period had elapsed.
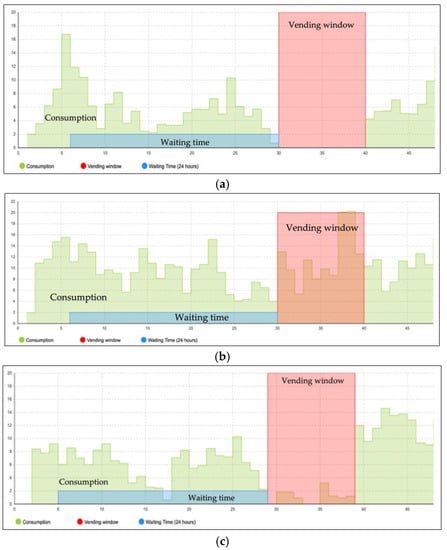
Figure 22.
(a) Case 1: A VO formed with 100% of CHDTs in the population with 100% full delegated autonomy. (b) Case 2: A VO formed with 10% of CHDTs in the population, with 10% full delegated autonomy. (c) Case 3: A VO formed with 90% of the population, with 90% full delegated autonomy.
Figure 22b is based on case 2 which represents the case of VO formation with a low population of delegated CHDTs. Thus 10% of the delegated autonomy was full. It can be observed from the vending window that energy consumption was not significantly affected as the number of CHDTs that formed the VO, and hence deferred the use of their appliances, were few (10%). The consumption that is observed during the vending widow is a result of the 90% CHDTs that did not join the VO.
In Figure 22c, we consider case 3, which led to a VO that is constituted of 90% of the population with full delegated autonomy. It is observed that consumption was significantly reduced during the vending window. This was because the majority of the CHDTs (90%) deferred all three appliances during that period. The relatively small consumption that was recorded could be attributed to the 10% that did not join the VO.
7.3. Scenario 3: Demonstrating Mutual Influence
The notion of mutual influence has been discussed extensively in [9]. This section shows the simulation outcome of the study concerning mutual influence. This outcome reflects a simulation for 728 h (30 days) and the following sample behaviors were extracted from some selected CHDTs. In Figure 23a,b, we show the characteristics of the modeled influence that was received by two different CHDTs, i.e., CHDT-1 and CHDT-2. The pulses that appear below the X-axis represent negative influences, whilst the ones above the X-axis are positive influences. Some examples of positive and negative influences, as well as attributes such as polarity, intensity, impact, and frequency of transmissions, are discussed in detail in [9].

Figure 23.
(a) Influences received by CHDT—1 and (b) influences received by CHDT—2.
In Figure 24a–d, we show how the aggregation of influences over time can be used to determine the overall behavior of a CHDT. We also illustrate how the overall behavior can be used in decision-making. For instance, Figure 24a–c show CHDTs 3, 4 and 5 that initially behaved negatively. However, the duration of their negative behavior lasted differently. For CHDT4 it lasted longer than for CHDTs 3 and 5. Eventually, all three CHDTs changed their behavior from negative to positive. This was because CHDT 3 was highly influenced positively in comparison with CHDT 4 and 5. For this reason, CHDT 3 exceeded the decision threshold “∝” and therefore was able to decide within the simulated period (30 days) but CHDT 4 and CHDT 5 were not. Finally, in Figure 24d, CHDT 6 behaved positively right from the beginning of the model execution.
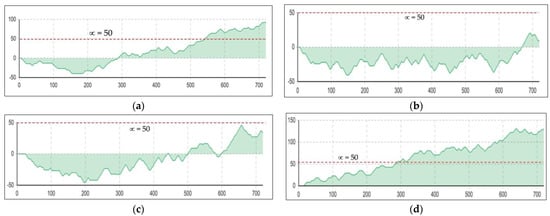
Figure 24.
(a) CHDT—3, (b) CHDT—4, (c) CHDT—5 and (d) CHDT—6.
7.4. Scenario 4a: Demonstrating Resource Sharing
This aspect of the study is in response to research question 2. Figure 25a, b illustrates the notion of resource sharing. In this scenario, a population of 100 CHDTs is used. The simulation was run for a simulated time of seven days. In Figure 25a, we illustrate the case where sharing is disabled for the period. This means that surplus energy from the prosumers was not shared with the community storage. In this case, all the surplus energy goes to waste. In the second scenario shown in Figure 25b, sharing was enabled. This means that surplus energy from the prosumers was shared with the community storage. Comparing Figure 25a,b, it can be observed that for the case where sharing was disabled, consumption from the grid was about 54% and there was no consumption from the community storage. However, when sharing was enabled, consumption from the grid dropped from 54% to 34% and consumption from community storage appreciated from 0 to 9%. This shows that without resource sharing dependence on the grid could be high within such an ecosystem. In this particular case, an example is discussed in [55]. In this example, a peer-to-peer energy sharing scheme for energy trading among smart energy hubs, which can trade in both electrical and thermal energies, is discussed. The study shows that sharing helps to reduce cost and dependency on gas/electricity utility companies. In a practical sense, a similar peer-to-peer energy sharing scenario [56] was conducted in South Africa. The study´s outcome revealed that sharing can substantially help to reduce the prosumers’ operational cost by maximizing the use of the locally generated renewable energy and storage while minimizing the reliance on the grid.
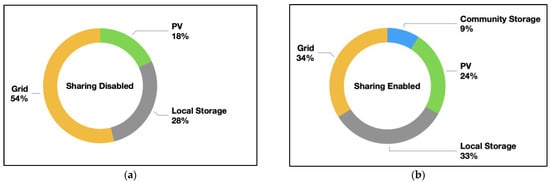
Figure 25.
(a) Sharing disabled and (b) sharing enabled.
7.5. Scenario 4b: Illustrating Level 1 and Level 2 Sharing
For this scenario we also consider a CHDT population of 100. However, for illustration purposes, Table 7 shows a total of 10 CHDTs constituted by five (5) prosumers and five (5) consumers. The model was run for a simulated period of seven days with resource sharing enabled. First, it can be observed from Table 7 that all prosumers had assigned PV systems of varying capacities. It can further be observed that all prosumers shared some quantity of energy (their surplus energy) at varying percentages with the community storage (level 1 sharing). For instance, prosumer CHDT 3 shared the most energy, thus, 52.46% of the total energy contributed to the community storage, while prosumer CHDT 5 shared the least, thus, 9%. Perhaps CHDT 3 was able to share more because of the capacity of the PV system that was assigned (Brainsystem, having a capacity of 6.930 KW). Concerning level 2 sharing, which involves consuming the energy stored by the community, all prosumers, except prosumer CHDT 6, also participated in level 2 sharing, although in fewer quantities as compared with the consumer CHDTs.
Table 7.
Results of scenario 4b showing level 1 and 2 sharing.
On the contrary, none of the consumer CHDTs was assigned a PV system. Furthermore, none of the consumer CHDTs was involved in level 1 sharing. However, all consumer CHDTs participated in level 2 sharing, and thus consumed energy from the community storage. It can further be observed that consumer CHDTs benefited more from level 2 sharing than prosumer CHDTs. For instance, consumer CHDTs 0, 1 and 7 consumed the highest from the community storage thus 14.46%, 32.34%, and 16.89% respectively. This is because, during the periods that PV is unavailable, usually in the evening, the community storage may be fully charged and ready to share its contents; however, most prosumer CHDTs would also have sufficient charge available in their local storage systems concurrently. In this case, the consumers’ CHDTs will most often be the ones to utilize energy from the community storage. In practice, energy from renewable sources will be cheaper than energy from fossil sources because energy prices are higher during peak periods of the day, which often coincide with evening demands. In the prototype mode, consumer CHDTs have access to only two energy sources, i.e., (1) the grid and (2) the community storage system. The energy consumption rule in the ecosystem is framed to promote sustainable consumption. The rule mandates both prosumer and consumer CHDTs to consume from the grid as the last option. Therefore, consumer CHDTs first option will be to consume from the community storage and will only consider the grid when the community storage is unavailable. On the other hand, the priority for prosumer CHDTs is in this order: first, to consume directly from the PV source, then from the local storage, then from the community storage, and from the grid as the last option. This kind of arrangement ensures the maximization of renewable energy consumption in the community while minimizing consumption from the grid.
8. Conclusions and Future Work
The objective of this study is to illustrate collaborative behaviors within a CVPP-E. The considered collaborative behaviors included: (1) collaborative roles played by the CVPP manager such as (a) opportunity-seeking and goal formulation, (b) goal proposition/invitation to form a coalition or virtual organization, (c) formation and dissolution of coalitions; and (2) collaborative roles played by CHDTs which include (a) acceptance or decline of invitations based on (i) delegation/non-delegation and (ii) value system compatibility/non-compatibility, and, (b) sharing of common resources. Using a multi-method simulation technique, a prototype model is developed.
Through the developed prototype, several collaborative scenarios and behaviors have been explored. For instance, the collaborative role of the manager, the collaborative role of the CHDTs, and finally resource sharing has been shown. The observed outcome of the study could be helpful for system designers or even ecosystem managers to develop policies that will aid in the physical implementation and governance of such ecosystems.
Furthermore, the adequacy of the adopted modeling techniques as a means to investigating the collaborative capacities of the REC ecosystem has been explored. The outcome has helped in revealing the prospects and feasibility of using collaboration as a management mechanism in an REC ecosystem. The study has also evidenced the collaborative capabilities of the key actors in these ecosystems. Furthermore, the simulated scenarios have shown the potential benefits of collaborations in a community framework such as an REC. In this sense, the study has helped to establish that it is feasible for the ecosystem to autonomously form coalitions or virtual organizations that may be used to address specific problems or goals.
From a global point of view, different types of VOs can be formed to help solve various problems currently plaguing the grid. For instance, a grid management VO can be formed to provide ancillary services, such as helping to shift loads from peak periods to off-peak periods using the concepts of “delegated autonomy” and “value system” compatibility. Similarly, a VO can be formed with the objective of minimizing consumption from the grid by ensuring that deferrable loads get a delegation to make maximum use of renewable energy sources when available. Additionally, the ecosystem could use the VO formation techniques to aggregate and export surplus energy from within the community to the grid, particularly when the ecosystem generates surplus renewable energy. This could be accomplished through a collaboration effort between the CVPP-E manager, a distribution service operator, the energy market, and the CHDTs themselves.
At the CHDT level, the concept of “delegation” can be a valuable method to help consumers to overcome repetitive, monotonous, and difficult-to-maintain daily activities. Such unexciting activities may involve daily decisions, preferences, and alterations in consumer behavior towards sustainable energy usage, etc. It is envisaged that through the “delegation” technique, such tedious tasks can be delegated to CHDTs to be performed on behalf of their users.
From the perspective of “values systems” it can be claimed that this technique can help ecosystem members or general citizens to overcome the phenomena of anxieties, fears, and uncertainties that serve as common and major barriers to the adoption and participation of consumers in sustainable energy consumption programs such as demand response. By assigning a “value system” to their CHDTs, individuals can flexibly participate in pro-sustainable energy consumption activities without necessarily compromising their comfort, convenience, or quality of service.
In conclusion, the performed experiments show the adequacy of the modelling technique as well as the feasibility of the proposed concepts.
With regard to future work, the utility and applicability of these notions will be investigated further by considering different scenarios. For example, if a disruptive event or catastrophic failure occurs anywhere in the ecosystem or community, several potential emergency virtual organizations (EVO) can be formed to assist emergency response teams in planning and carrying out necessary disaster response/recovery operations. In such circumstances, CHDTs can provide valuable data regarding the operational state of their physical twin, or, in other words, the extent to which the event has affected their corresponding physical counterpart. Such data from CHDTs can be used to assess the impact of the disruptive event and aid in response planning. An ad-hoc EVO can also be formed in such circumstances to aggregate energy that can be used to support critical infrastructures or parts of the community that are in dire or critical need of energy. Additionally, with their cognitive intelligence and decision-making capabilities, CHDTs can take autonomous decisions, such as isolating the physical twin from being susceptible to events or failures that have the potential to cascade across an entire community.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/computers12020039/s1, File S1: The ODD reporting framework.
Author Contributions
Conceptualization; K.O.A.-K. and L.M.C.-M.; methodology, K.O.A.-K.; software; K.O.A.-K.; validation; K.O.A.-K.; formal analysis, K.O.A.-K.; investigation K.O.A.-K.; resources; L.M.C.-M.; data curation; K.O.A.-K. and L.M.C.-M.; writing—original draft preparation, K.O.A.-K.; writing—review and editing, K.O.A.-K. and L.M.C.-M.; visualization, K.O.A.-K.; supervision, L.M.C.-M.; project administration, L.M.C.-M.; funding acquisition, L.M.C.-M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Portuguese FCT program, UIDB/00066/2020.
Data Availability Statement
The data that was used to simulate the 4 photovoltaic system was sourced from this link https://pvoutput.org/.
Acknowledgments
The authors acknowledge the Portuguese FCT program UIDB/00066/2020 for providing financial support for this work. The University of Energy and Natural Resources and UNINOVA-CTS are hereby acknowledged for supporting this work with their research facilities and resources.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Azarova, V.; Cohen, J.; Friedl, C.; Reichl, J. Designing local renewable energy communities to increase social acceptance: Evidence from a choice experiment in Austria, Germany, Italy, and Switzerland. Energy Policy 2019, 132, 1176–1183. [Google Scholar] [CrossRef]
- Verde, S.F.; Rossetto, N. The Future of Renewable Energy Communities in the EU. An investigation at the Time of the Clean Energy Package; Technical Report; The European University Institute: Fiesolana, Italy, 2020; pp. 1–69. [Google Scholar] [CrossRef]
- Zhao, J.; Dong, K.; Dong, X.; Shahbaz, M. How renewable energy alleviate energy poverty? A global analysis. Renew. Energy 2022, 186, 299–311. [Google Scholar] [CrossRef]
- The European Parliament and the Council of the European Union. Directive (EU) 2018/2001 of the European Parliament and of the Council on the promotion of the use of energy from renewable sources. Off. J. Eur. Union 2018, 328, 82–209. [Google Scholar]
- European Commission. State of the Energy Union 2021—Contributing to the European Green Deal and the Union’s Recovery; No. Com(2021) 950 Final; European Commission: Brussels, Belgium, 2021; pp. 1–31. [Google Scholar]
- Adu-Kankam, K.O.; Camarinha-Matos, L.M. Towards collaborative Virtual Power Plants: Trends and convergence. Sustain. Energy, Grids Networks 2018, 16, 217–230. [Google Scholar] [CrossRef]
- Lamagna, M.; Groppi, D.; Nezhad, M.M.; Piras, G. A comprehensive review on digital twins for smart energy management system. Int. J. Energy Prod. Manag. 2021, 6, 323–334. [Google Scholar] [CrossRef]
- Adu-Kankam, K.O.; Camarinha-Matos, L.M. A Framework for the Integration of IoT Components into the Household Digital Twins for Energy Communities. In Internet of Things. IoT through a Multi-Disciplinary Perspective, Proceedings of the 5th IFIP International Cross-Domain Conference, IFIPIoT 2022, Amsterdam, The Netherlands, 27–28 October 2022; Camarinha-Matos, L., Ribeiro, L.M., Strous, L., Eds.; Springer: Chem, Switzerland, 2022; pp. 197–216. [Google Scholar]
- Adu-Kankam, K.O.; Camarinha-Matos, L.M. Modelling ‘Delegated Autonomy’ in Cognitive Household Digital Twins. In Proceedings of the 2022 11th International Conference on Renewable Energy Research and Application (ICRERA), Istanbul, Turkey, 18–21 September 2022; pp. 192–199. [Google Scholar] [CrossRef]
- Adu-Kankam, K.O.; Camarinha-Matos, L.M. Modelling Mutual Influence Towards Sustainable Energy Consumption. In Technological Innovation for Digitalization and Virtualization; Luis, M., Camarinha-Matos, L.M., Eds.; Springer: Lisbon, Portugal; Cham, Switzerland, 2022; pp. 3–15. [Google Scholar] [CrossRef]
- Camarinha-Matos, L.M.; Afsarmanesh, H. The Evolution Path to Collaborative Networks 4.0. In IFIP Advances in Information and Communication Technology; Springer: Cham, Switzerland, 2021; Volume 600, pp. 170–193. [Google Scholar] [CrossRef]
- Camarinha-Matos, L.; Ortiz, A.; Boucher, X.; Osório, A.L. Collaborative Networks in Digitalization and Society 5.0; Springer International Publishing: Cham, Switzerland, 2022; Volume 662. [Google Scholar]
- Camarinha-Matos, L.M. Collaborative smart grids—A survey on trends. Renew. Sustain. Energy Rev. 2016, 65, 283–294. [Google Scholar] [CrossRef]
- Camarinha-Matos, L.M.; Fornasiero, R.; Afsarmanesh, H. Collaborative Networks as a Core Enabler of Industry 4.0. In Proceedings of the 18th IFIP WG 5.5 Working Conference on Virtual Enterprises, PRO-VE 2017, Vicenza, Italy, 18–20 September 2017; Volume 506, pp. 3–17. [Google Scholar] [CrossRef]
- Nazarenko, A.A.; Camarinha-Matos, L.M. The Role of Digital Twins in Collaborative Cyber-Physical Systems. In Technological Innovation for Life Improvement DoCEIS 2020; Springer: Berlin/Heidelberg, Germany, 2020; Volume 577, pp. 191–205. [Google Scholar] [CrossRef]
- Camarinha-Matos, L.M.; Afsarmanesh, H.; Galeano, N.; Molina, A. Collaborative networked organizations—Concepts and practice in manufacturing enterprises. Comput. Ind. Eng. 2009, 57, 46–60. [Google Scholar] [CrossRef]
- Englezos, D.; Hadjidemetriou, L.; Papadopoulos, P.; Timotheou, S.; Polycarpou, M.; Panayiotou, C. A Digital Twin Architecture for Smart Buildings. In Proceedings of the 2022 IEEE International Smart Cities Conference (ISC2), Paphos, Cyprus, 26–29 September 2022; Volume 739551, pp. 1–7. [Google Scholar] [CrossRef]
- Clausen, A.; Arendt, K.; Johansen, A.; Sangogboye, F.C.; Kjærgaard, M.B.; Veje, C.T.; Jørgensen, B.N. A digital twin framework for improving energy efficiency and occupant comfort in public and commercial buildings. Energy Informatics 2021, 4, 1–19. [Google Scholar] [CrossRef]
- Fathy, Y.; Jaber, M.; Nadeem, Z. Digital Twin-Driven Decision Making and Planning for Energy Consumption. J. Sens. Actuator Networks 2021, 10, 37. [Google Scholar] [CrossRef]
- TwinErgy. TwinERGY system. 2020. Available online: https://www.twinergy.eu/twinergy-system (accessed on 7 October 2022).
- Henzel, J.; Wróbel, Ł.; Fice, M.; Sikora, M. Energy Consumption Forecasting for the Digital-Twin Model of the Building. Energies 2022, 15, 4318. [Google Scholar] [CrossRef]
- Waraga, O.A.; Talib, M.A.; Bettayeb, M.; Ghenai, C.; Nasir, Q.S. A framework application for improving energy demand forecasting using digital twining. In Proceedings of the The 2nd International Conference on Distributed Sensing and Intelligent Systems (ICDSIS 2021), Hefei, China, 18–20 June 2021; pp. 95–105. [Google Scholar] [CrossRef]
- Deena, G.; Gulati, K.; Jha, R.; Bajjuri, U.R.; Sahithullah, M.; Singh, M. Artificial Intelligence and a Digital Twin are effecting building energy Management. In Proceedings of the 2022 International Conference on Innovative Computing, Intelligent Communication and Smart Electrical Systems (ICSES), Chennai, India, 24–25 September 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Spudys, P.; Afxentiou, N.; Konatzii, P.; Jurelionis, A.; Fokaides, P.A. Employment of digital twins for the implementation of energy audits. In Proceedings of the 2022 7th International Conference on Smart and Sustainable Technologies (SpliTech), Split/Bol, Croatia, 5–8 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Koltsios, S.; Katsaros, N.; Mpouzianas, N.; Klonis, P.; Giannopoulos, G.; Pastaltzidis, I.; Chatzipanagiotidou, P.; Klumbvte, E.; Jurelionis, A.; Seduikvte, L.; et al. Digital Twin application on next-generation Building Energy Performance Certification scheme. In Proceedings of the 2022 IEEE International Smart Cities Conference (ISC2), Paphos, Cyprus, 26–29 September 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Yang, B.; Lv, Z.; Wang, F. Digital Twins for Intelligent Green Buildings. Buildings 2022, 12, 856. [Google Scholar] [CrossRef]
- Xiong, T.; Cheng, Q.; Yang, C.; Yang, X.; Lin, S. Application of Digital Twin Technology in Intelligent Building Energy Efficiency Management System. In Proceedings of the 2021 International Conference on E-Commerce and E-Management (ICECEM), Dalian, China, 26 September 2021; pp. 393–396. [Google Scholar] [CrossRef]
- Shitole, A.B.; Kandasamy, N.K.; Liew, L.S.; Sim, L.; Bui, A.K. Real-Time Digital Twin of Residential Energy Storage System for Cyber-Security Study. In Proceedings of the 2021 IEEE 2nd International Conference on Smart Technologies for Power, Energy and Control (STPEC), Bilaspur, India, 19–22 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Pires, F.; Ahmad, B.; Moreira, A.P.; Leitao, P. Digital Twin based What-if Simulation for Energy Management. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, Canada, 10–13 May 2021; pp. 309–314. [Google Scholar] [CrossRef]
- Zhao, K.; Liu, Y.; Ming, W.; Zhou, Y.; Wu, J. Digital Twin-Driven Estimation of State of Charge for Li-ion Battery. In Proceedings of the 2022 IEEE 7th International Energy Conference (ENERGYCON), Riga, Latvia, 9–12 May 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Cheng, G.; Wei, W.; Liu, Z. Research on Intelligent Operation and Maintenance System of Battery Based on Digital Twin. In Proceedings of the 2021 2nd International Conference on Computer Engineering and Intelligent Control (ICCEIC), Chongqing, China, 12–14 November 2021; pp. 154–157. [Google Scholar] [CrossRef]
- Kannari, L.; Piira, K.; Bistrom, H.; Vainio, T. Energy-data-related digital twin for office building and data centre complex. In Proceedings of the 2022 37th Conference on Design of Circuits and Integrated Circuits (DCIS), Pamplona, Spain, 16–18 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Pexyean, T.; Saraubon, K.; Nilsook, P. IoT, AI and Digital Twin For Smart Campus. In Proceedings of the 2022 Research, Invention and Innovation Congress: Innovative Electricals and Electronics (RI2C), Bangkok, Thailand, 4–5 August 2022; pp. 160–164. [Google Scholar] [CrossRef]
- Camarinha-Matos, L.M.; Afsarmanesh, H. Classes of Collaborative Networks. In Encyclopedia of Networked and Virtual Organizations; Putnik, G.D., Cunha, M.M., Eds.; IGI Global: Hershey, PA, USA, 2008; Volume 1, pp. 106–111. [Google Scholar]
- IBM. What Is a Digital Twin? Available online: https://www.ibm.com/topics/what-is-a-digital-twin (accessed on 30 June 2022).
- Yukai, H. The Analysis and Application of Incentive Theory and Organizational Culture. Int. J. Econ. Commer. Manag. 2017, 5, 513–520. [Google Scholar]
- Residential Energy-Saving Incentives—Ves. Available online: https://www.virginiaenergysense.org/incentives/residential-energy-saving-incentives/ (accessed on 12 November 2022).
- Anylogic. Multimethod Simulation Modeling for Business Applications—AnyLogic Simulation Software. White paper. Available online: https://www.anylogic.com/resources/white-papers/multimethod-simulation-modeling-for-business-applications/ (accessed on 6 February 2023).
- Anylogic. Multimethod Modeling Modelling for Business. Available online: https://www.anylogic.com/resources/educational-videos/simulation-modeling-for-business/ (accessed on 6 February 2023).
- Borshchev, A. Multi-method modeling. In Proceedings of the 2013 Winter Simulation Conference, Washington, DC, USA, 8–11 December 2013; pp. 4089–4100. [Google Scholar]
- Brailsford, S.C.; Eldabi, T.; Kunc, M.; Mustafee, N.; Osorio, A.F. Hybrid simulation modelling in operational research: A state-of-the-art review. Eur. J. Oper. Res. 2019, 278, 721–737. [Google Scholar] [CrossRef]
- Nguyen, L.K.N.; Howick, S.; Megiddo, I. A Hybrid Simulation Modelling Framework for Combining System Dynamics and Agent-Based Models. In Proceedings of the SW21 The OR Society Simulation Workshop, Loughborough, UK, 22–24 March 2021; pp. 385–394. [Google Scholar] [CrossRef]
- Multimethod Modeling—AnyLogic Simulation Software. Available online: https://www.anylogic.com/use-of-simulation/multimethod-modeling/ (accessed on 2 September 2022).
- Borshchev, A.; Filippov, A. From System Dynamics and Discrete Event to Practical Agent Based Modeling: Reasons, Techniques, Tools. In Proceedings of the 22nd International Conference of the System Dynamics Society, Oxford, UK, 25–29 July 2004; Volume 66, pp. 1–23. [Google Scholar]
- Gunal, M.M. A guide for building hospital simulation models. Health Syst. 2012, 1, 17–25. [Google Scholar] [CrossRef]
- AnyLogic. AnyLogic: Simulation Modeling Software Tools & Solutions for Business. 2018. Available online: https://www.anylogic.com/ (accessed on 27 April 2020).
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User Acceptance of Information Technology: Toward a Unified View. Manag. Inf. Syst. Res. Center, Univ. Minn. 2003, 27, 425–478. [Google Scholar] [CrossRef]
- Taber, K.S. The Use of Cronbach’s Alpha When Developing and Reporting Research Instruments in Science Education. Res. Sci. Educ. 2018, 48, 1273–1296. [Google Scholar] [CrossRef]
- IBM. IBM SPSS Statistics for Academic Institutions|IBM. Available online: https://www.ibm.com/products/spss-statistics-campus-editions. (accessed on 19 January 2023).
- Zimmermann, L.; Jean, P.; Evans, M.; Griggs, J.; King, N.H.; Oberts, C.; Evans, P.; Household Electricity Survey: A Study of Domestic Electrical Product Usage. Intertek Report R66141. 2012. Available online: https://www.gov.uk/government/uploads/system/uploads/attachment_data/file/208097/10043_R66141HouseholdElectricitySurveyFinalReportissue4.pdf (accessed on 5 September 2021).
- Opportunity Definition & Meaning|Dictionary.com. Available online: https://www.dictionary.com/browse/opportunity. (accessed on 9 September 2021).
- Landry, L. How to Delegate Effectively: 9 Tips for Managers|HBS Online Havard Business School. 2021. Available online: https://online.hbs.edu/blog/post/how-to-delegate-effectively (accessed on 5 October 2021).
- Shirado, H.; Iosifidis, G.; Tassiulas, L.; Christakis, N.A. Resource sharing in technologically defined social networks. Nat. Commun. 2019, 10, 1079. [Google Scholar] [CrossRef] [PubMed]
- PVOutput. Available online: https://pvoutput.org/ (accessed on 8 October 2021).
- Daryan, A.G.; Sheikhi, A.; Zadeh, A.A. Peer-to-Peer Energy sharing Among Smart Energy Hubs in an integrated Heat-Electricity Network. Electr. Power Syst. Res. 2022, 206, 107726. [Google Scholar] [CrossRef]
- Kusakana, K. Modeling an Optimal Peer-to-Peer Energy Sharing Between Prosumers in a South African Context. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar] [CrossRef]

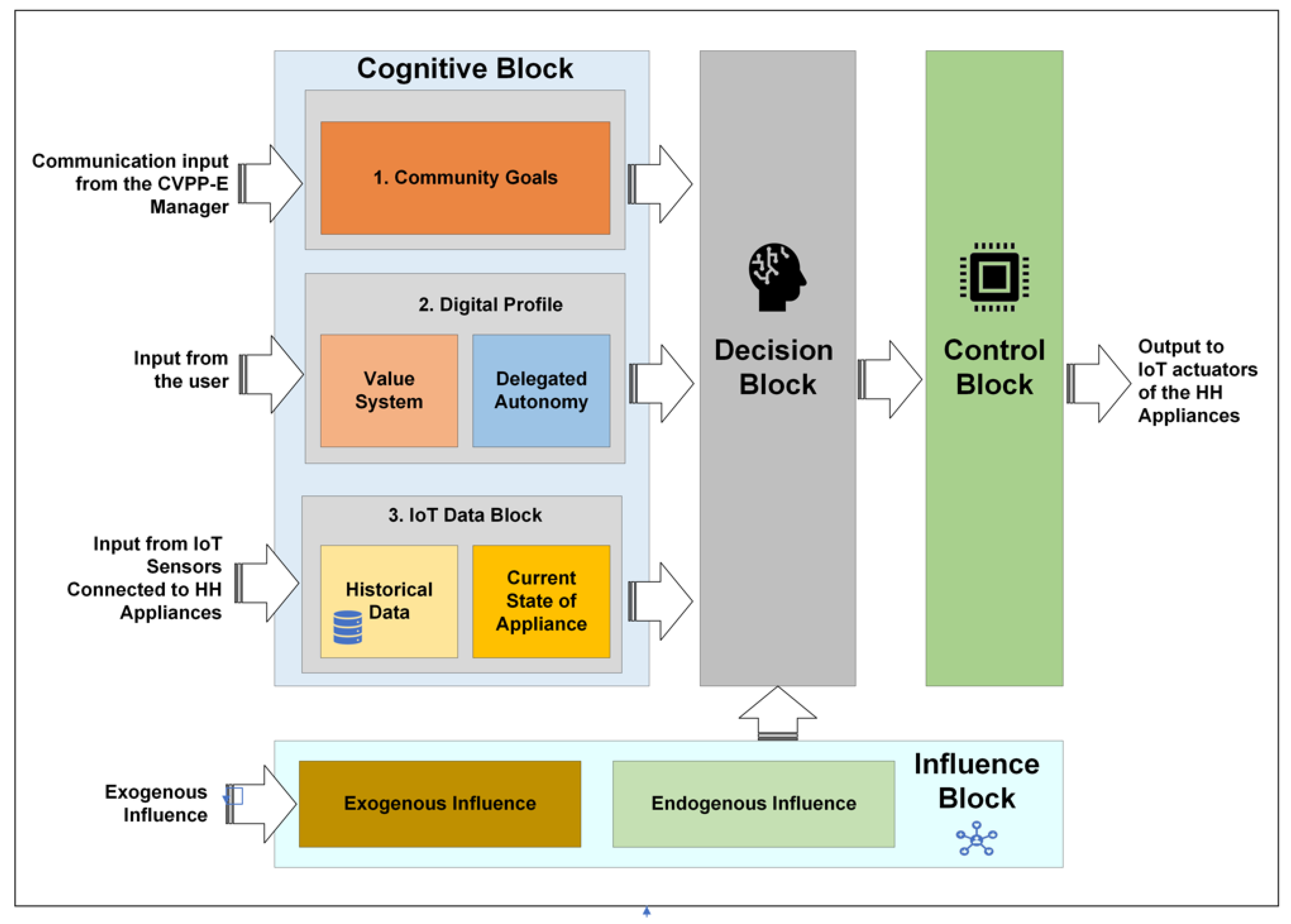
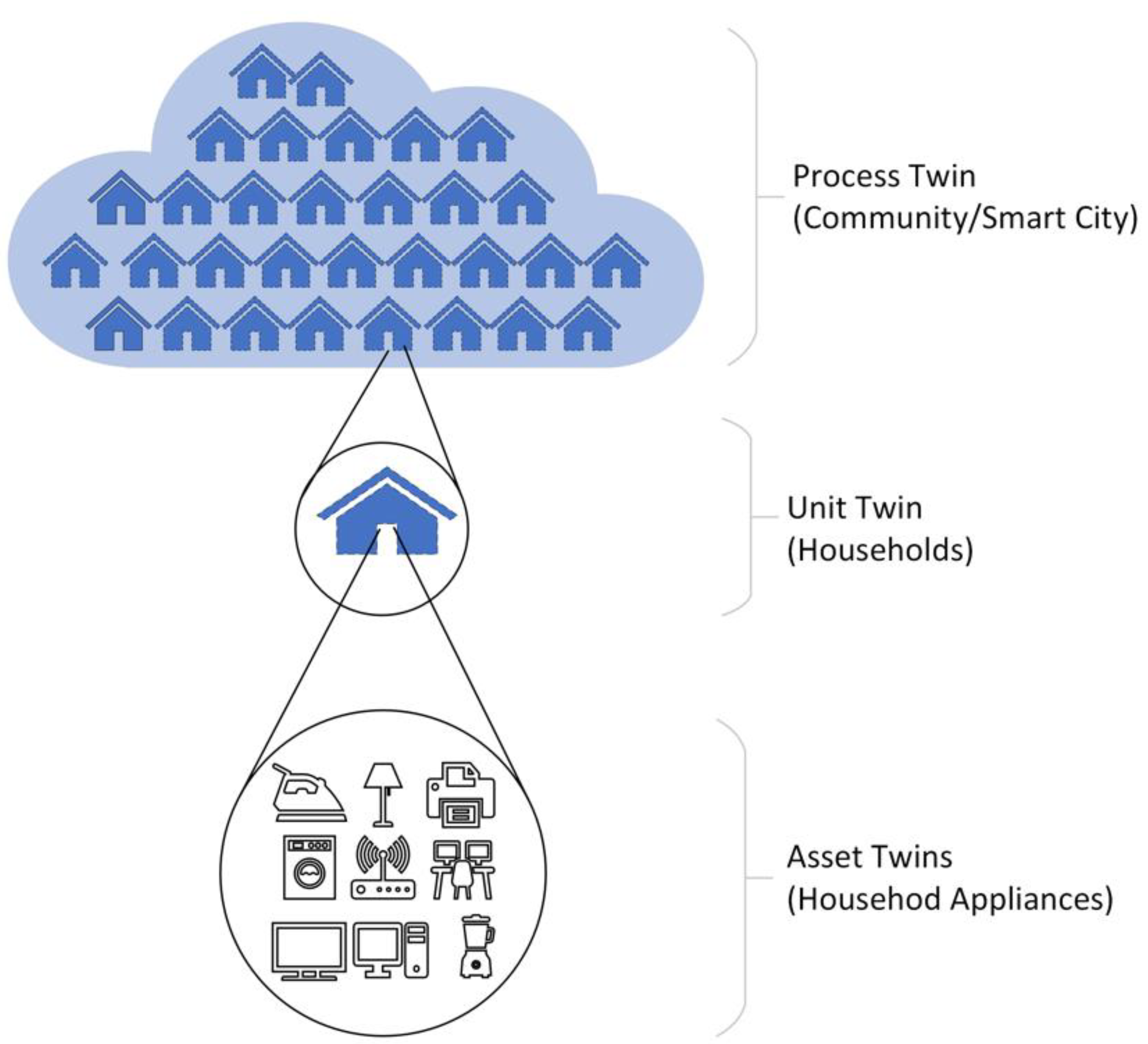
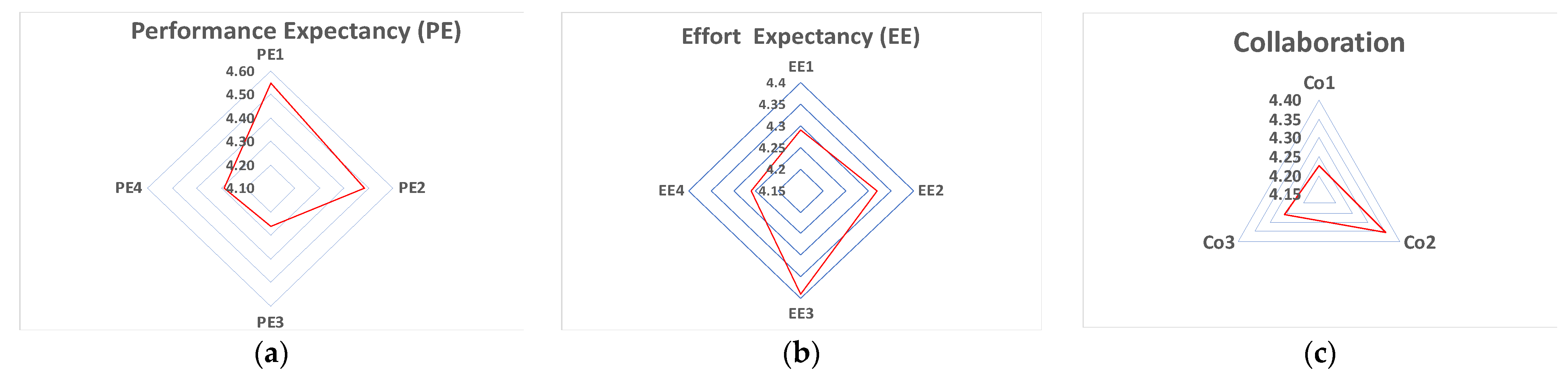
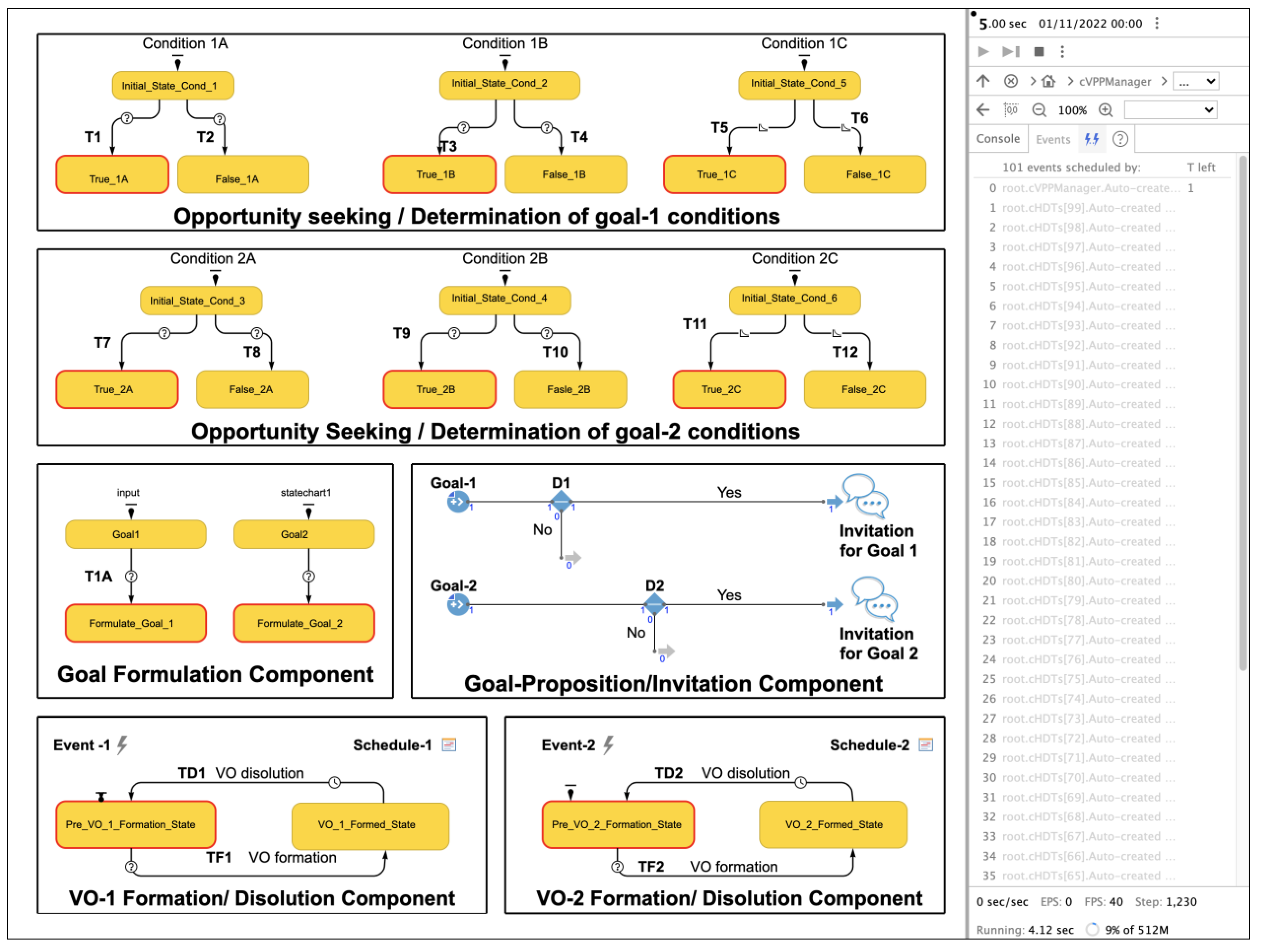
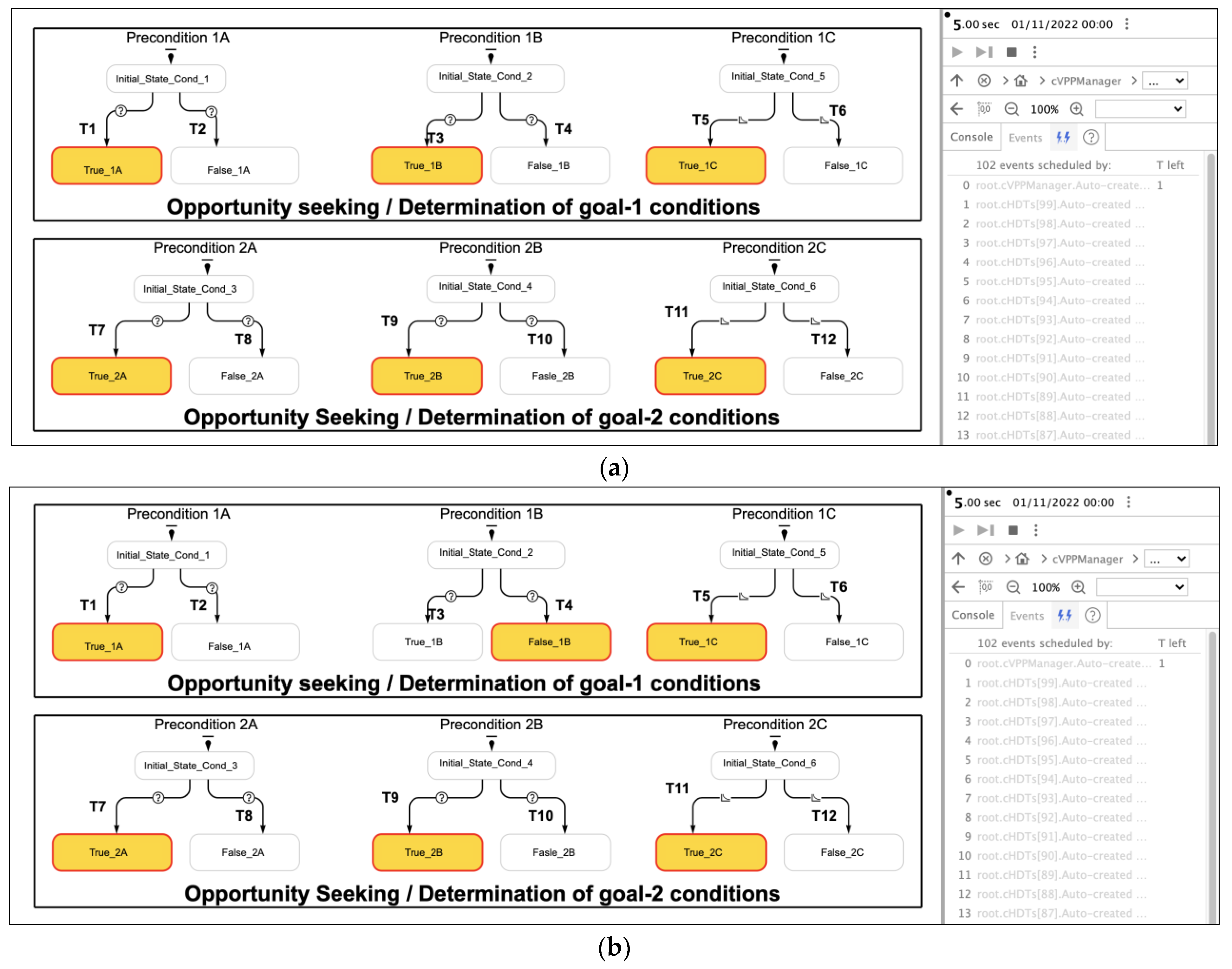
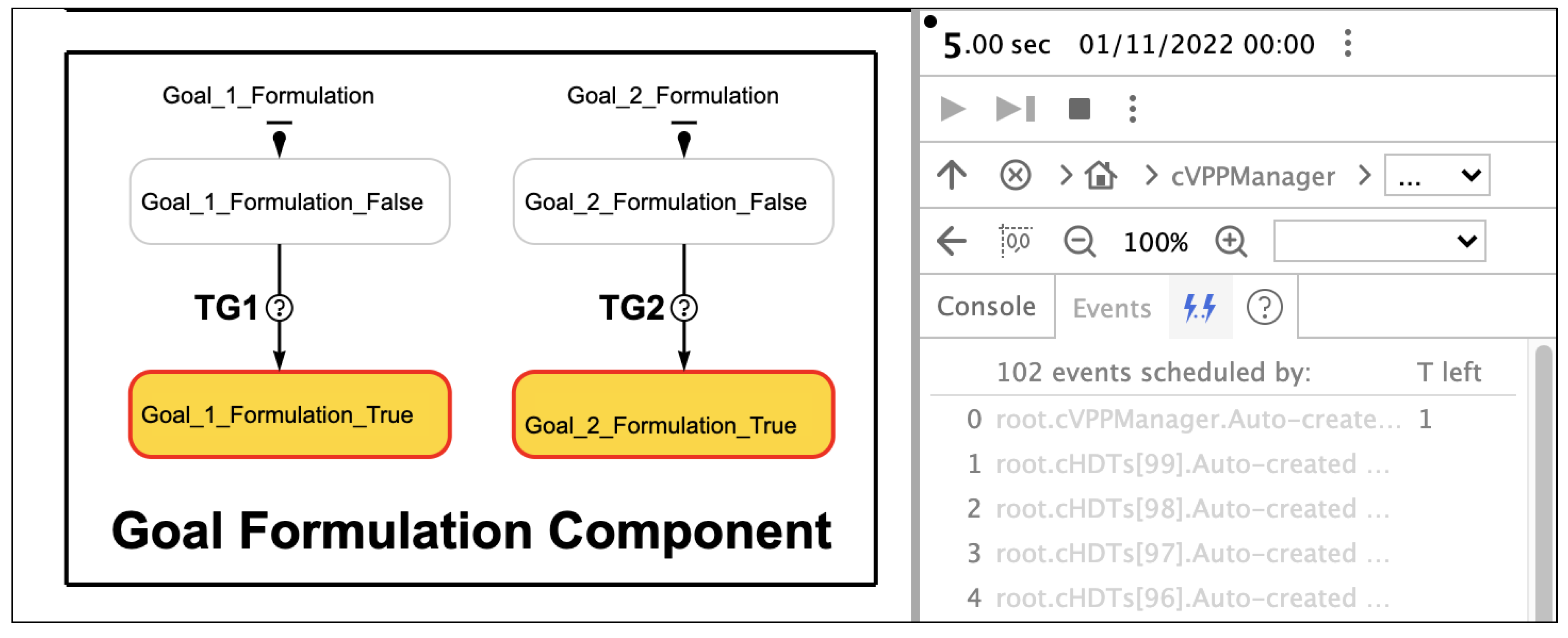
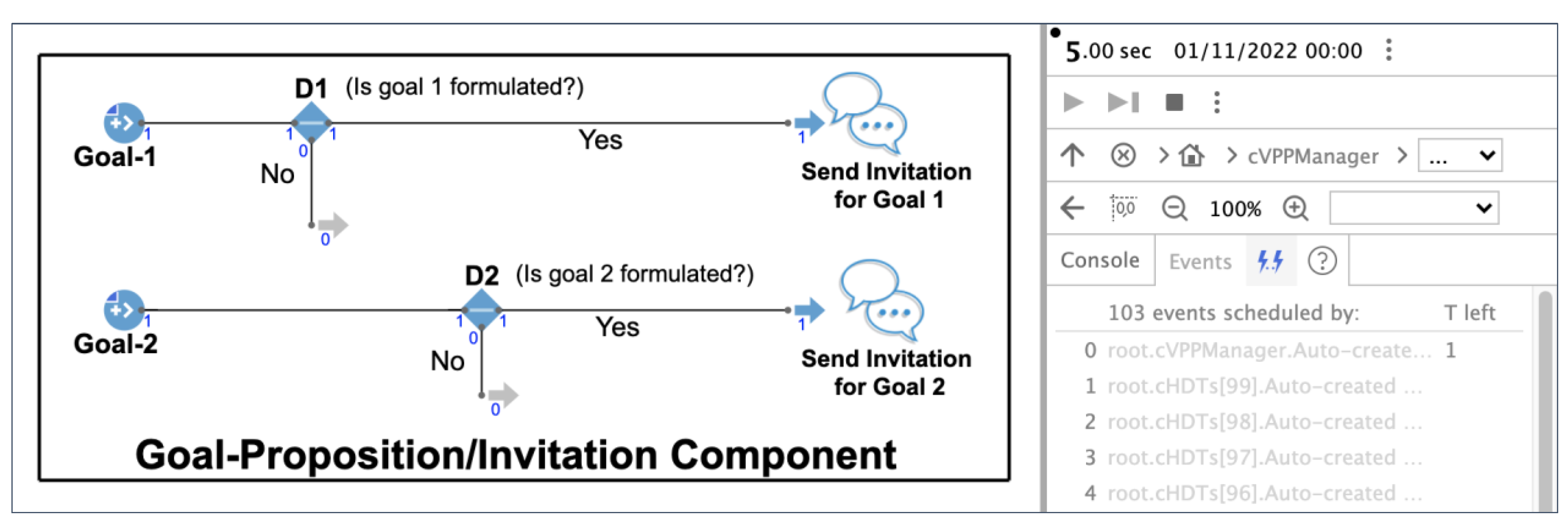
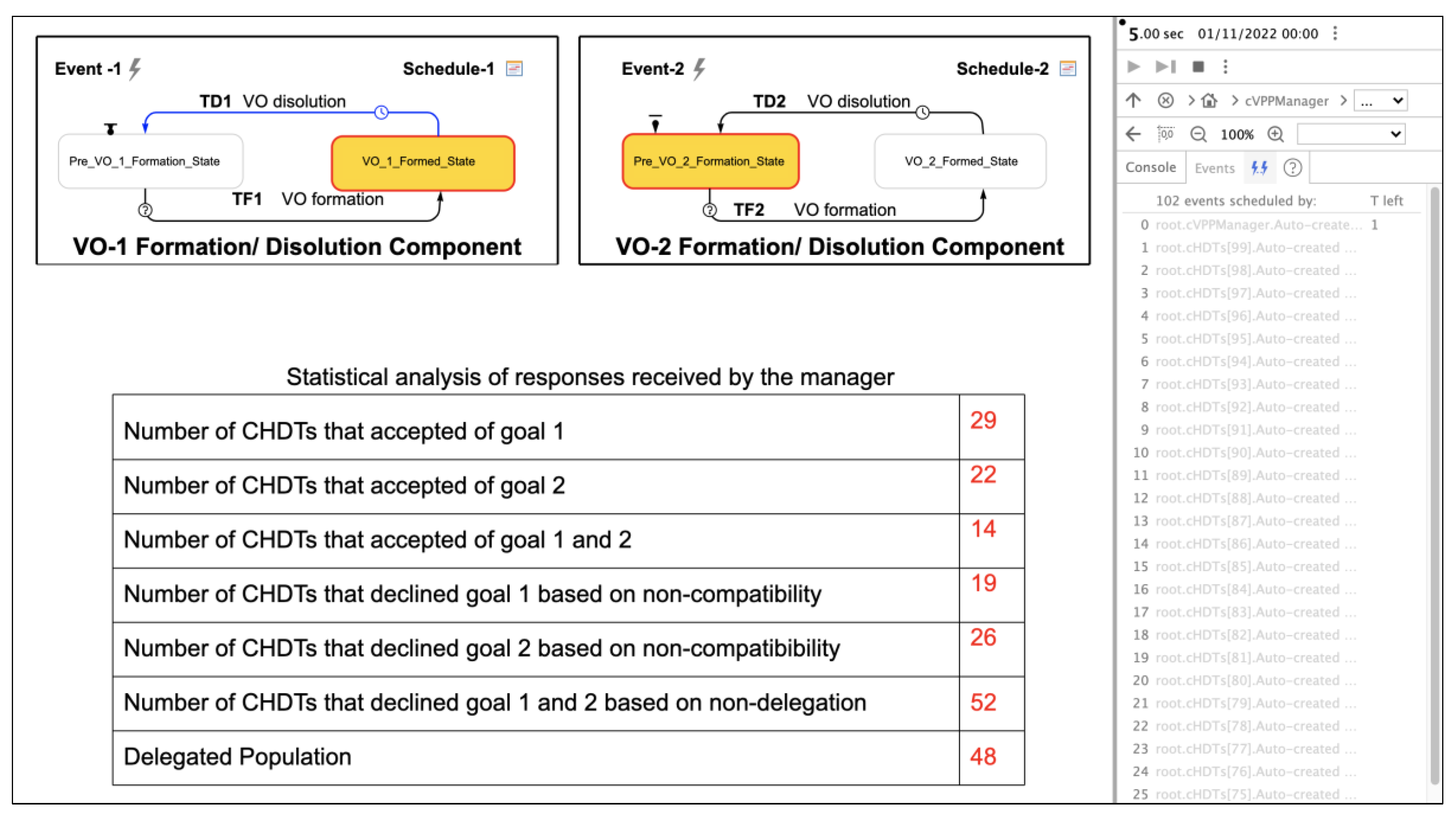
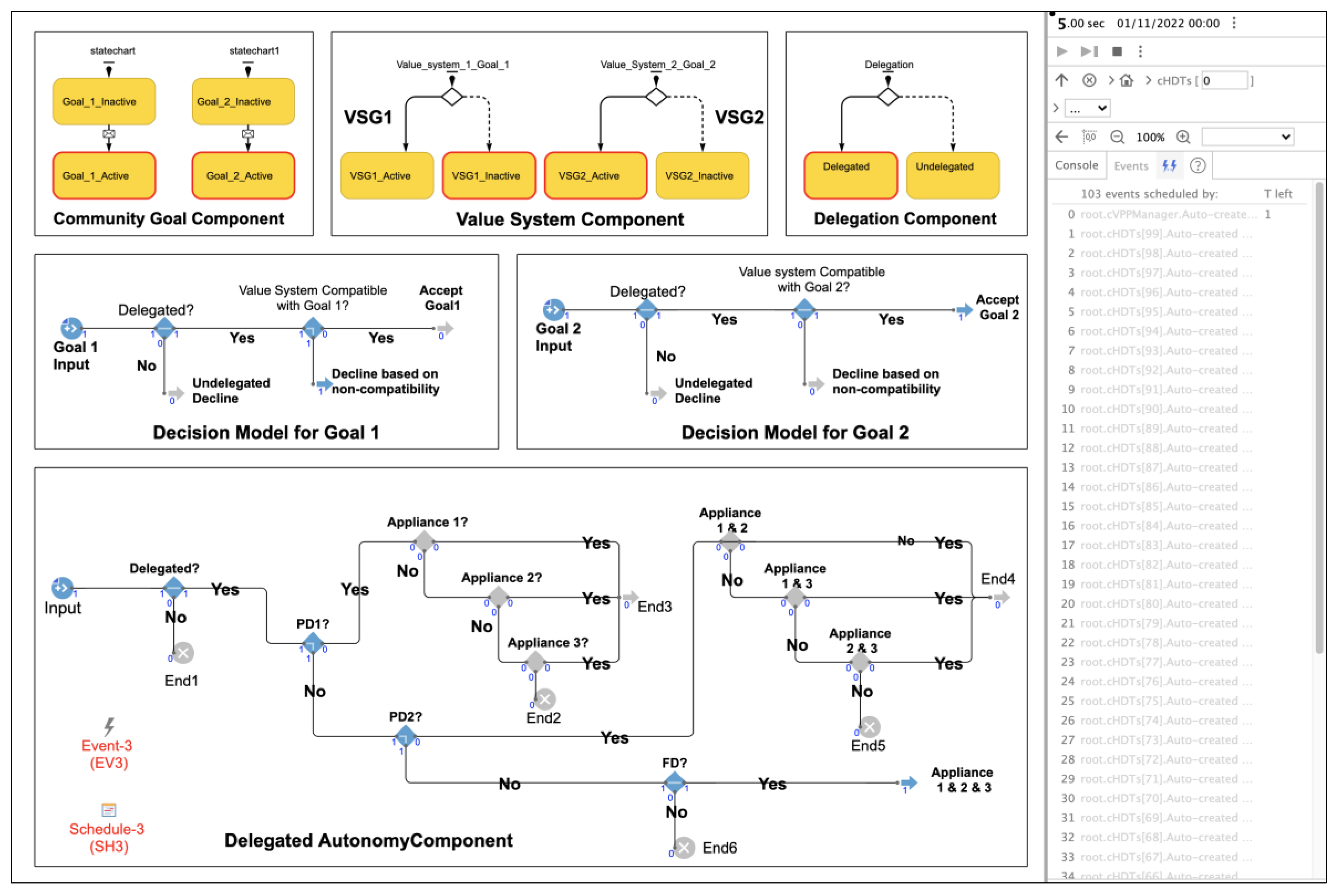
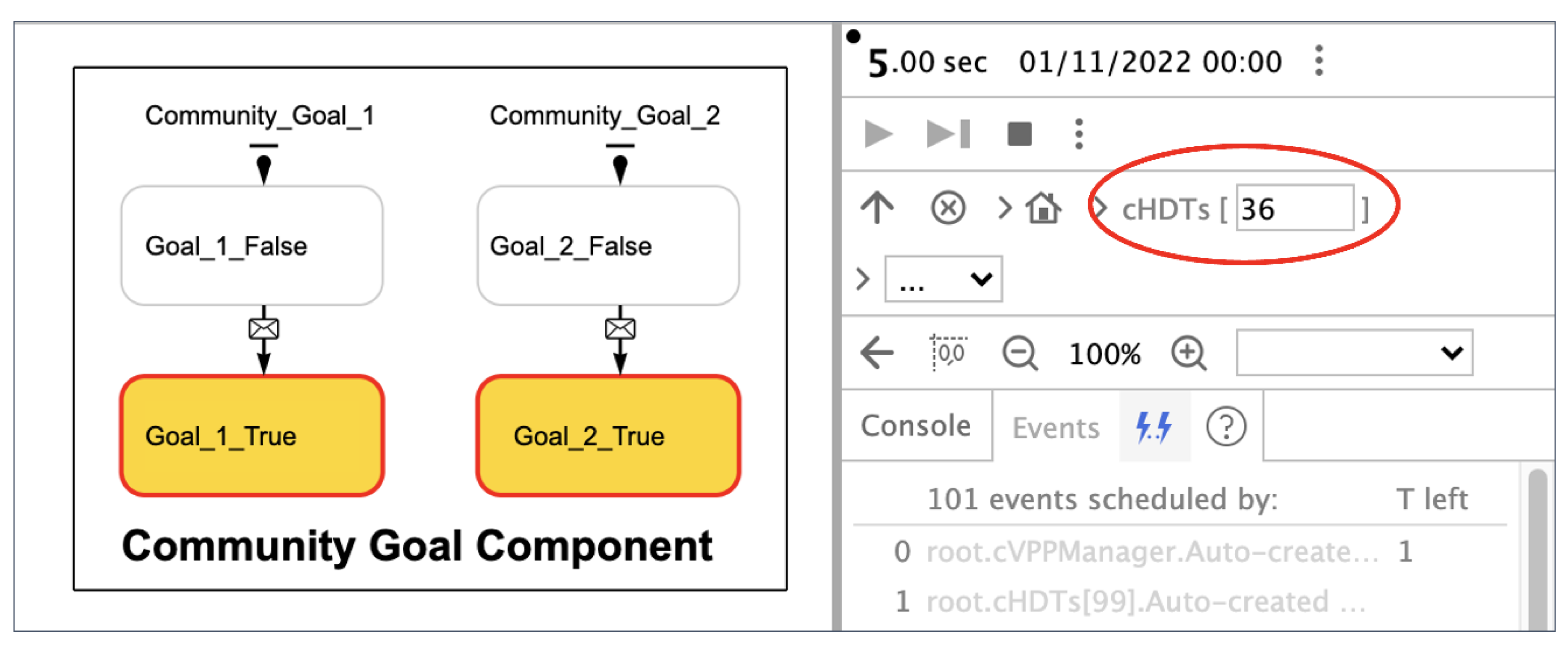
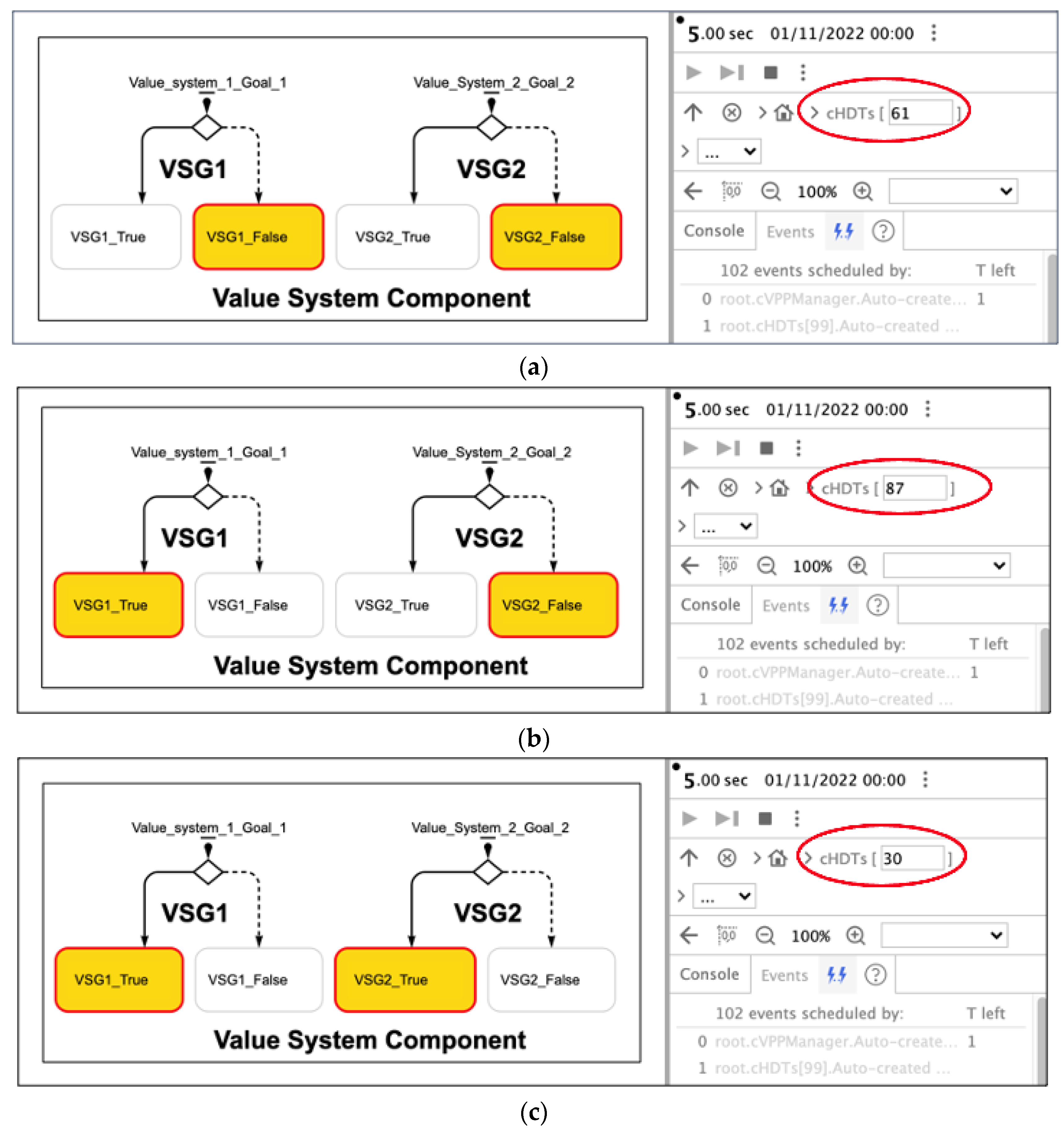
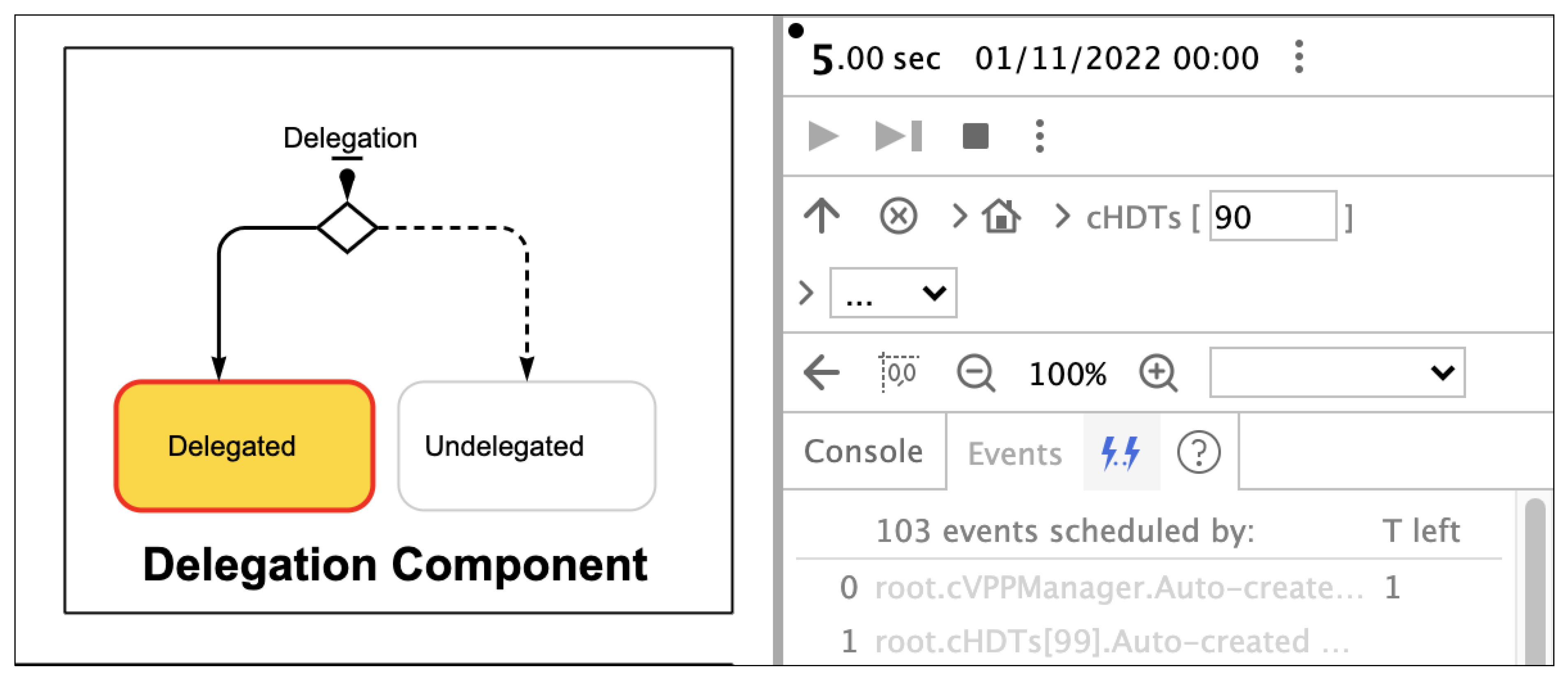
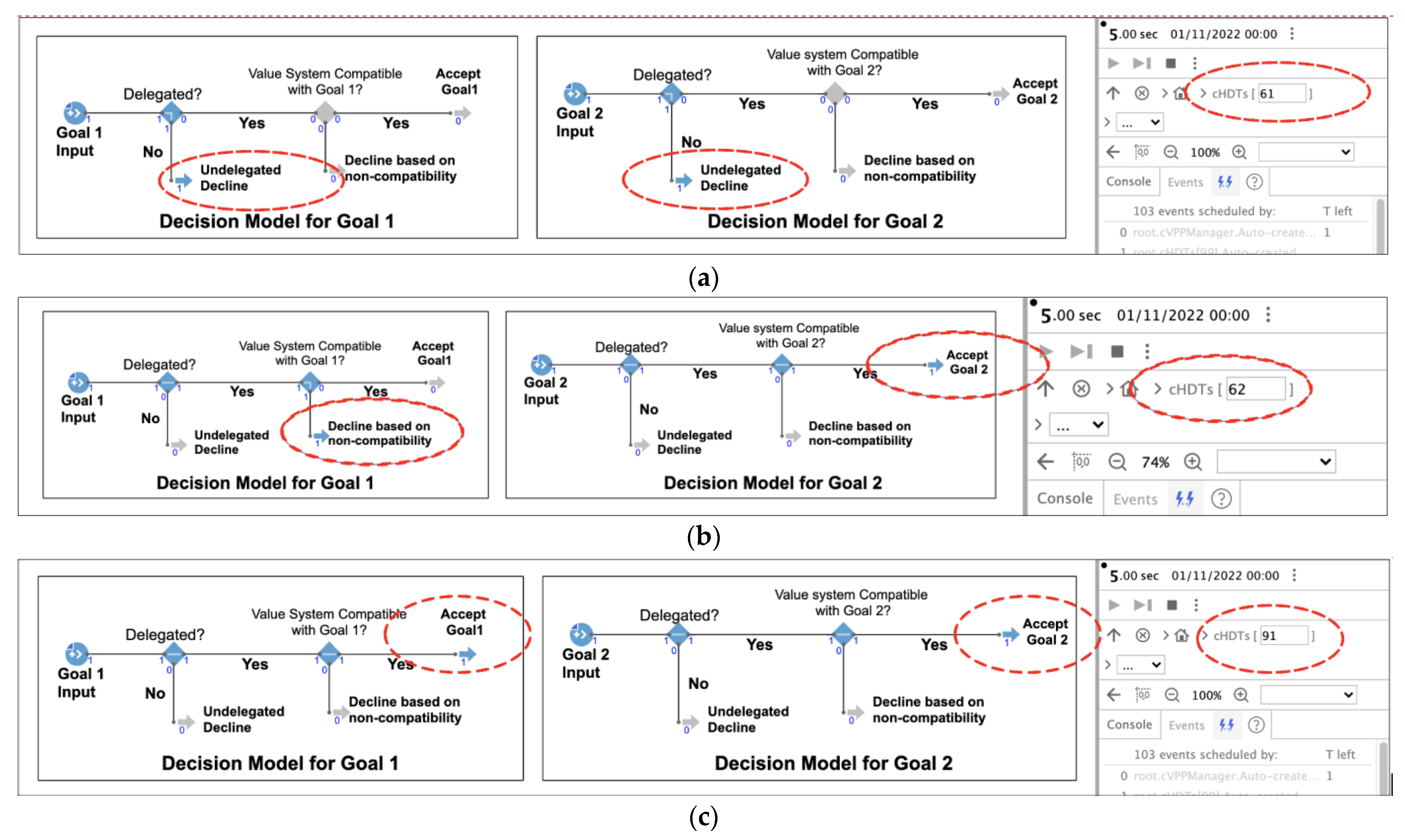
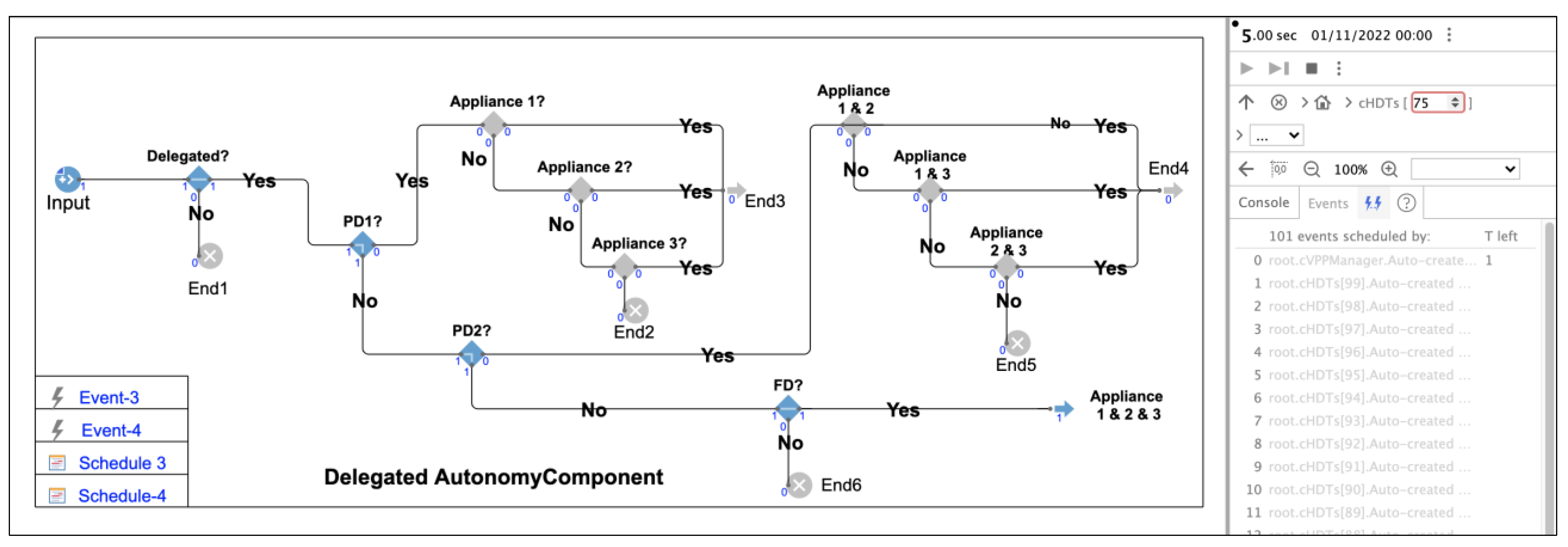
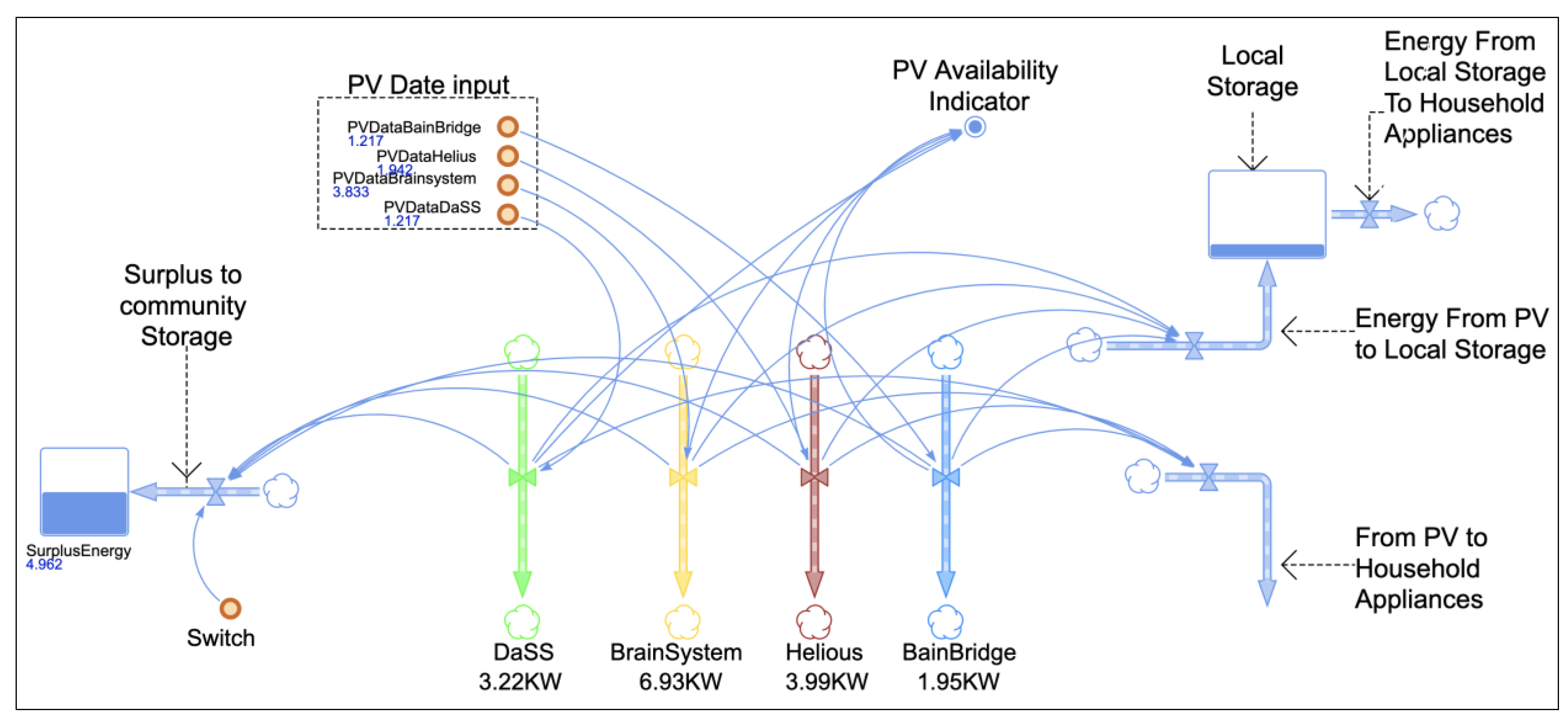
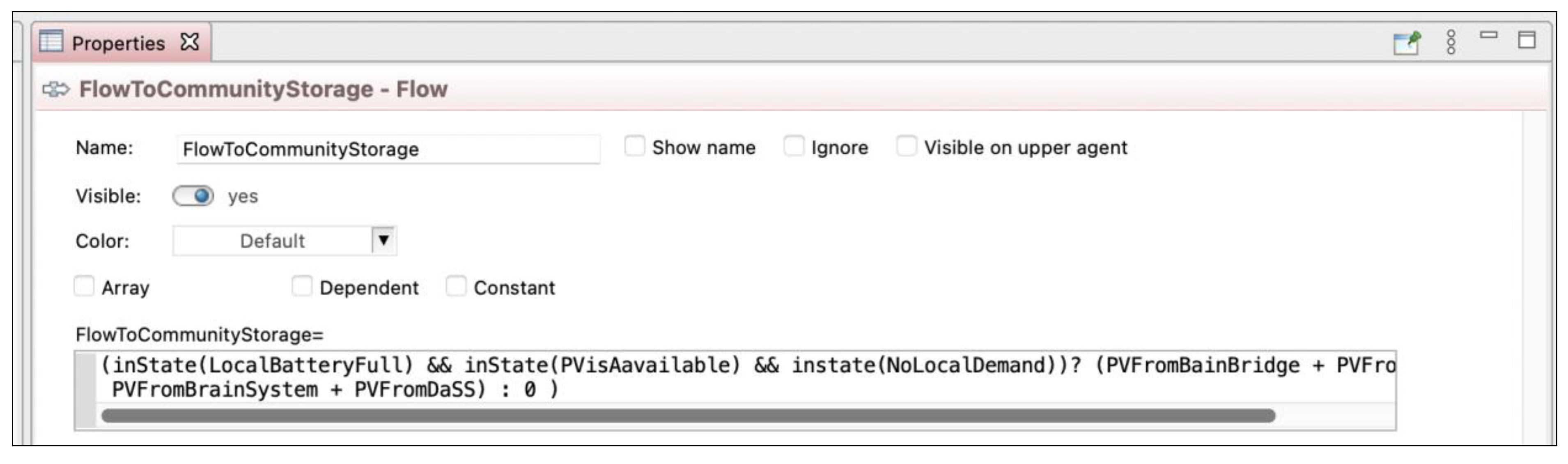
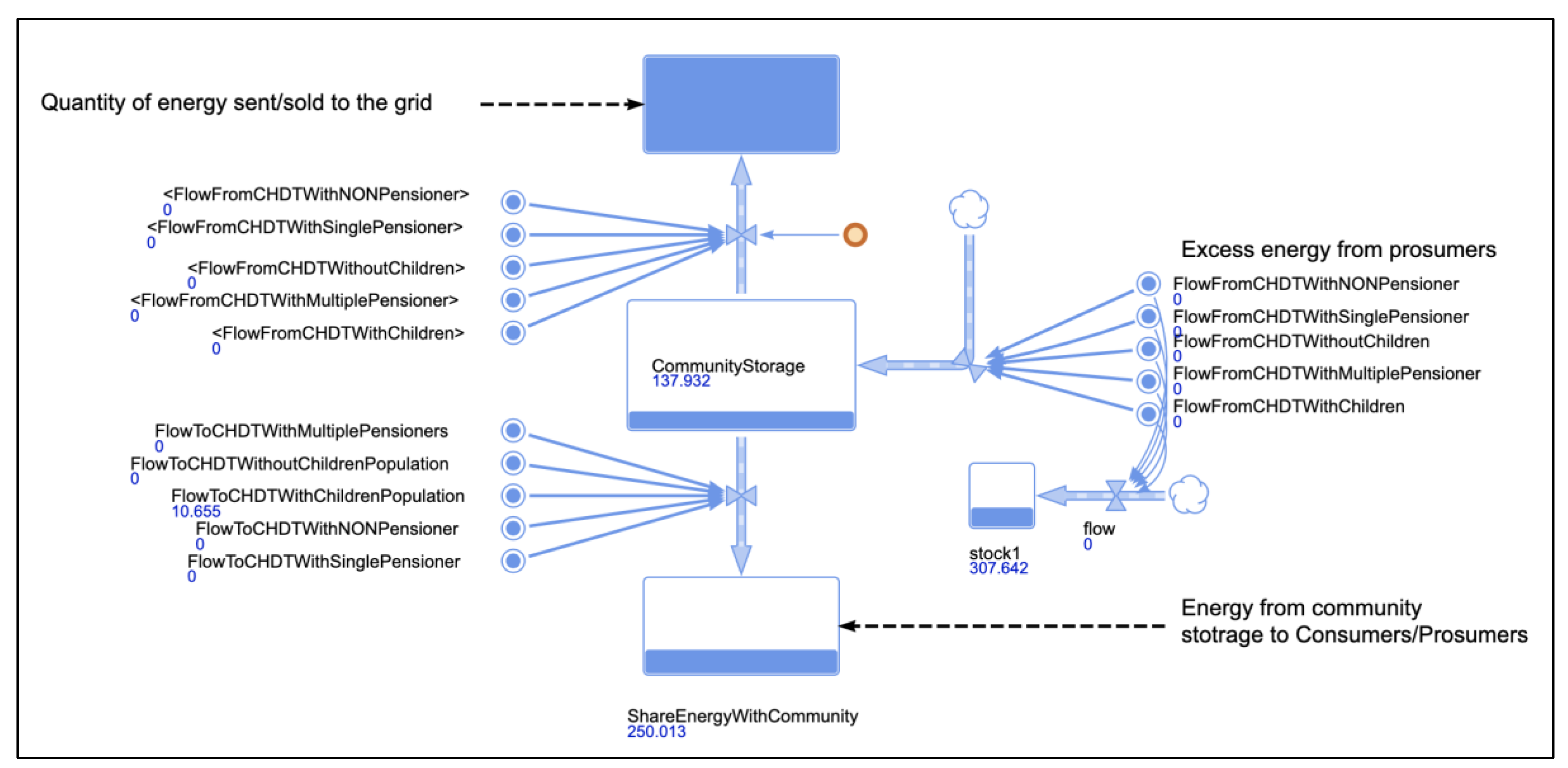
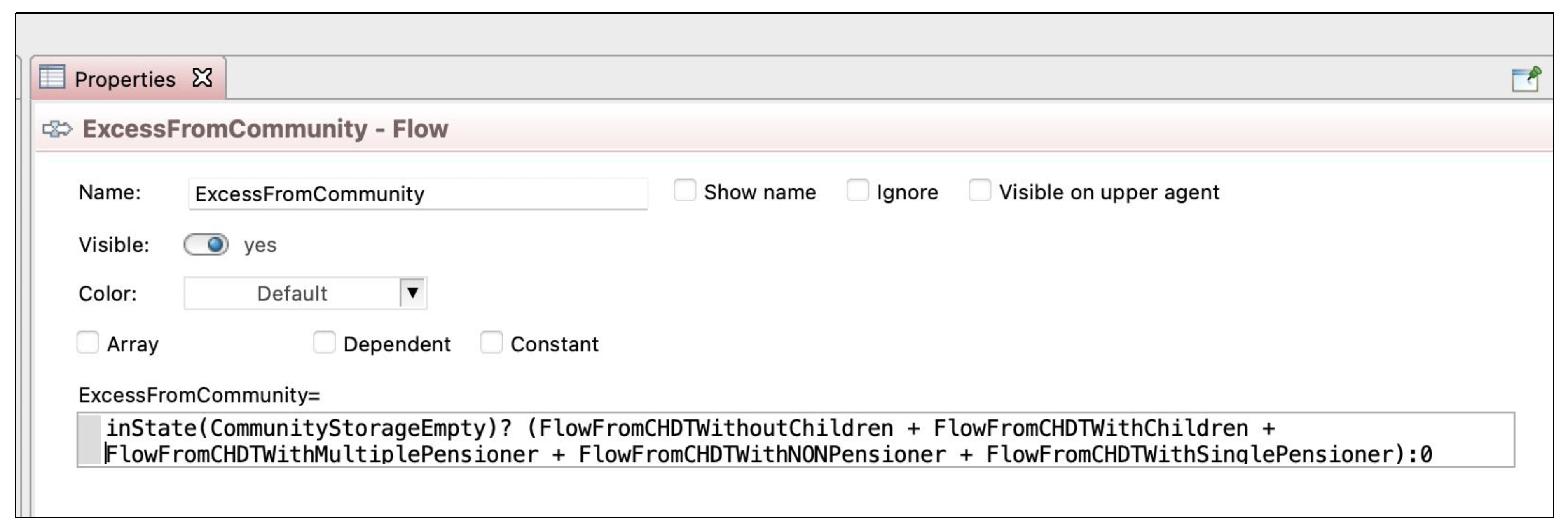
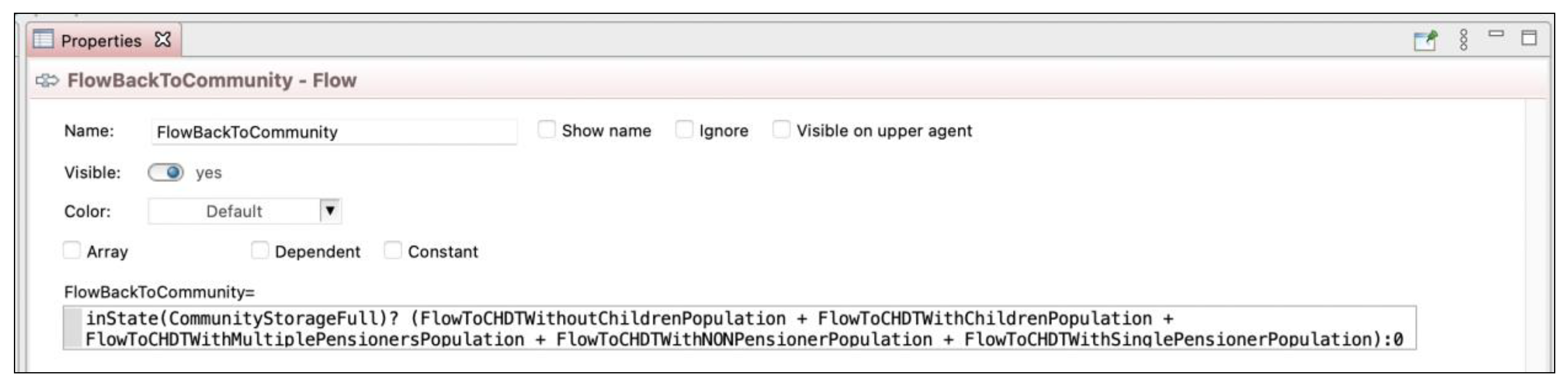
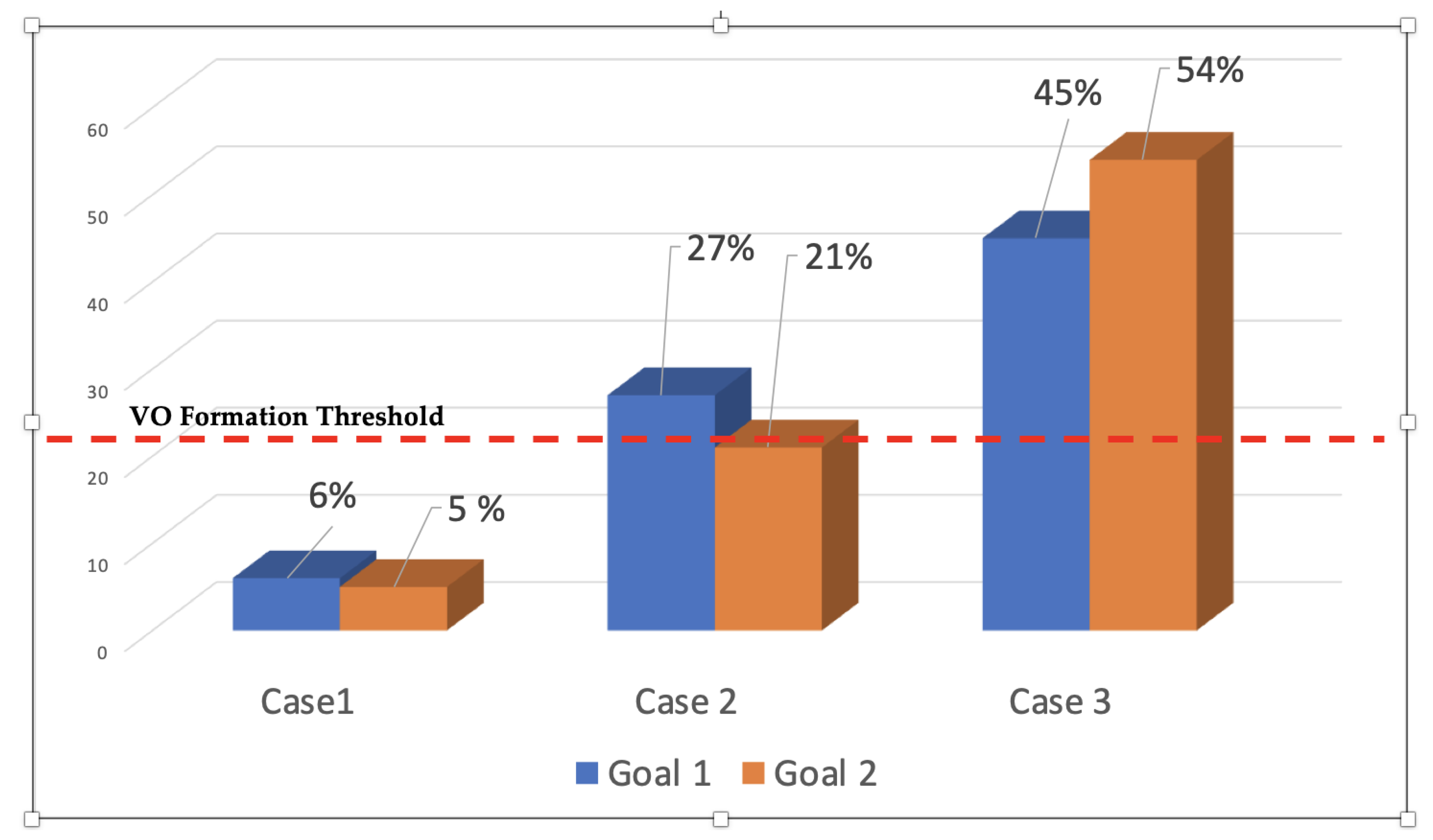
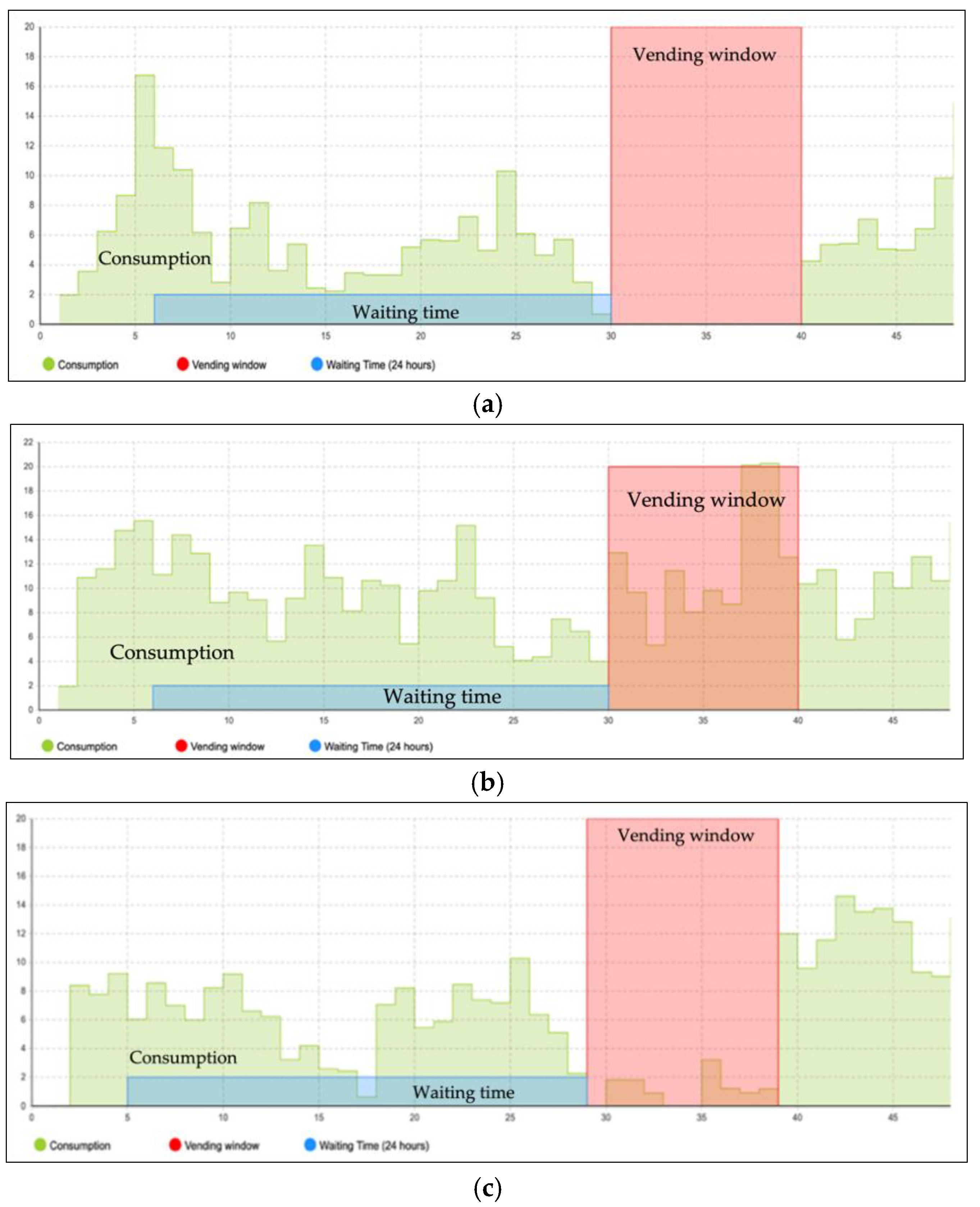

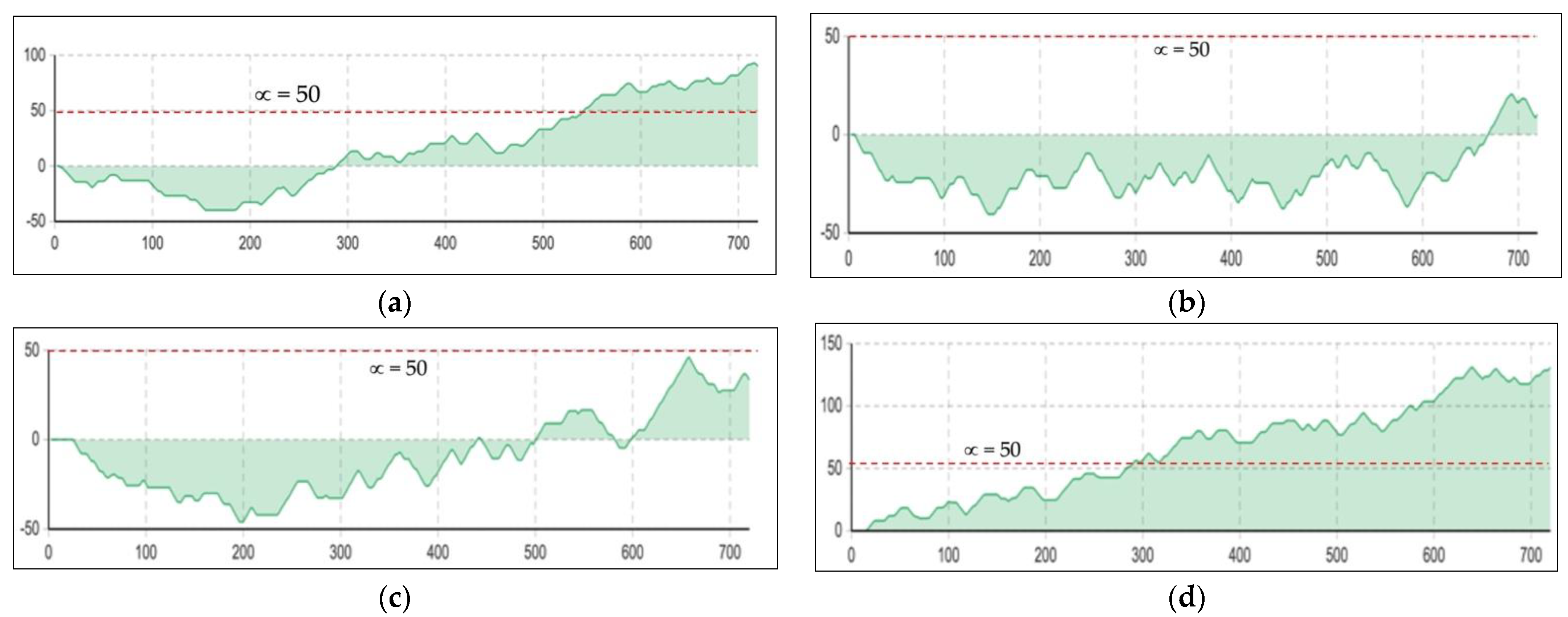
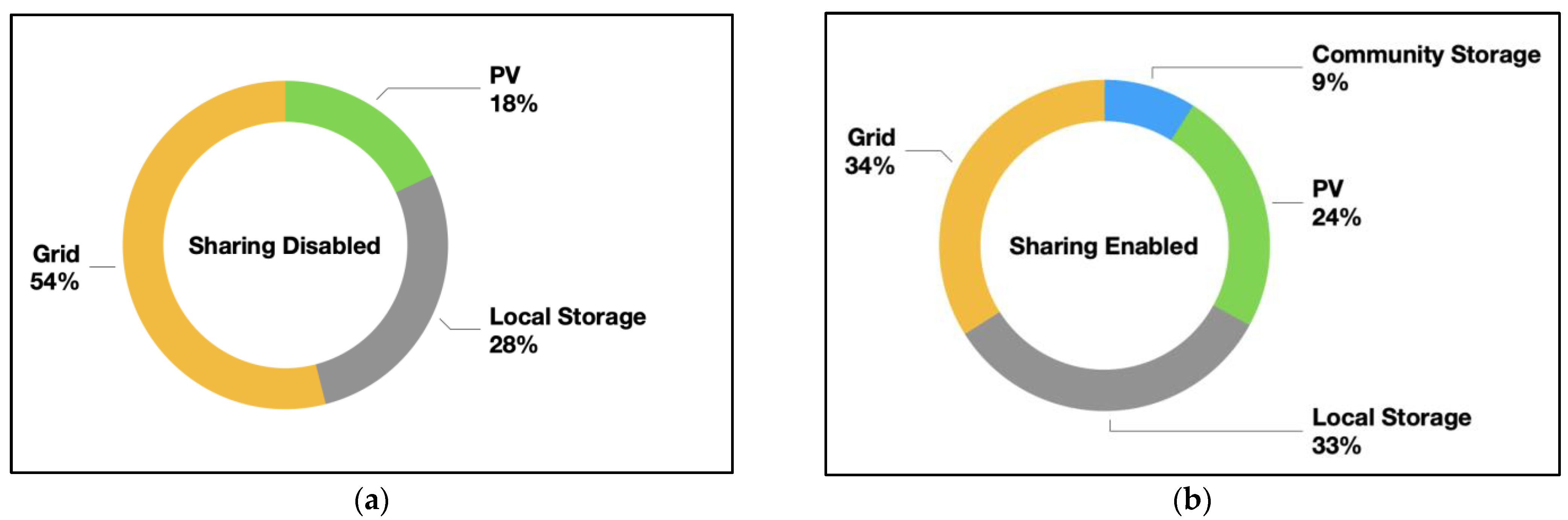
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).