





Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay

Abstract
:1. Introduction
Contribution
- Control authority transfer is regarded as a crucial aspect of autonomous driving until full-automation technologies are fully commercialized. Despite dedicated efforts to transfer authority from autonomous vehicles to local human drivers, some remain unclear when it comes to scenarios including utilizing the teleoperation of the remote vehicle. Due to this fact, in this study, a control transfer mechanism was proposed to compensate for the communication delay between the remote vehicle and the control center to guarantee control transfer within a specific required time. In addition, not only the proposed method can be applied to the scenarios containing the teleoperation of ground vehicles, but it can also be applied to the field that the application is targeting wireless teleoperation of mobile robots, surgical robots, and so on.
- One another aspect of this study is that it is based on actual measured communication delays. As long as the communication was constructed based on wireless communication, inherently it contains passive and erroneous communication delay latency. Therefore, in this study, we measured an actual communication delay between the remote vehicle and the control center to reference and manage the parameters that supplement the proposed control transfer algorithm. In the future, large-scale deployment scenarios can be expected including valet parking service, minimum risk state takeover when autonomous is in malfunctioning state, and so on.
2. Methodology
2.1. Driver Intervention Intention
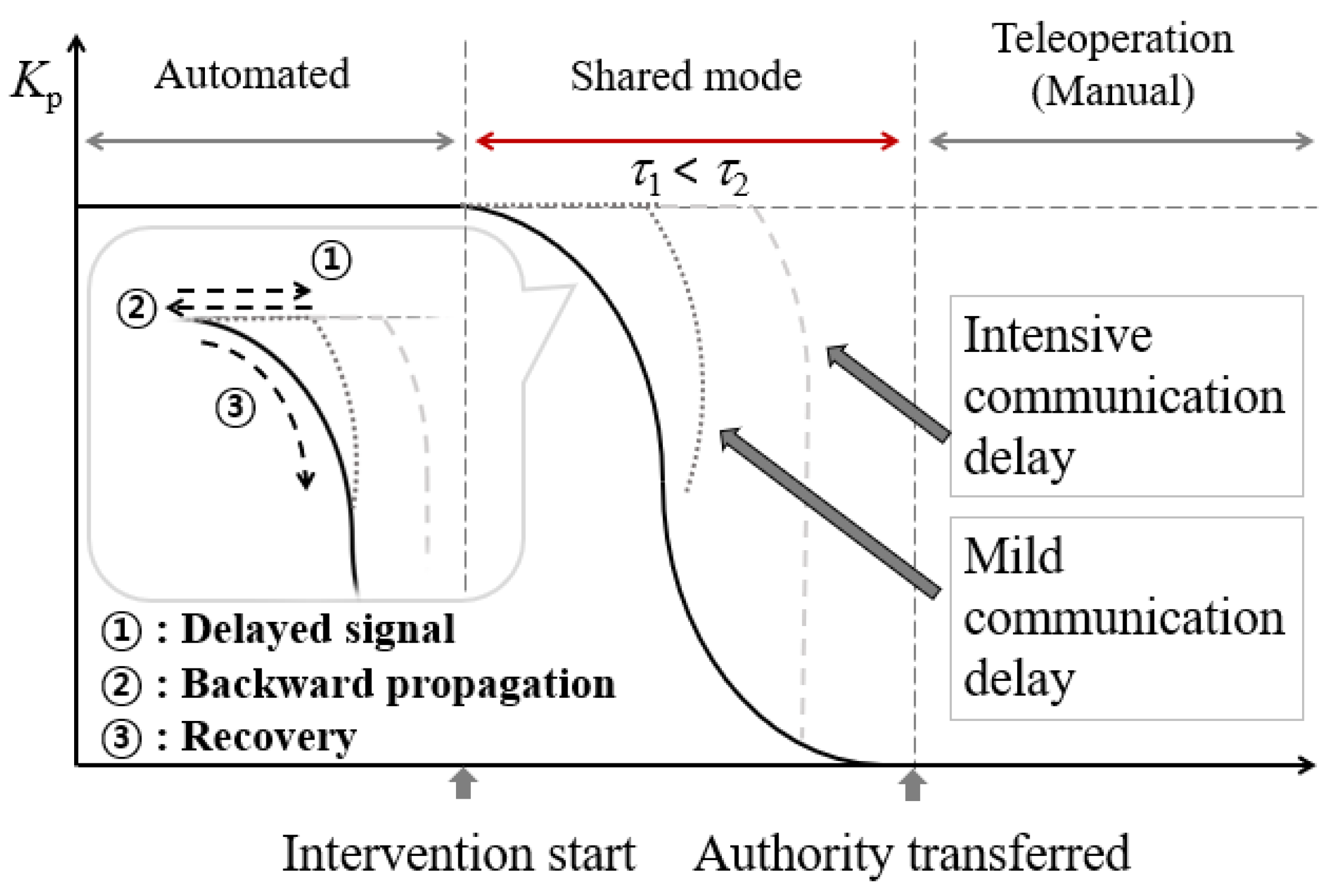
2.2. Control Transfer Mechanism
3. Experiment
General Setup
4. Result
4.1. Communication Delay
4.2. Authority Transfer of Outer and Inner Controller
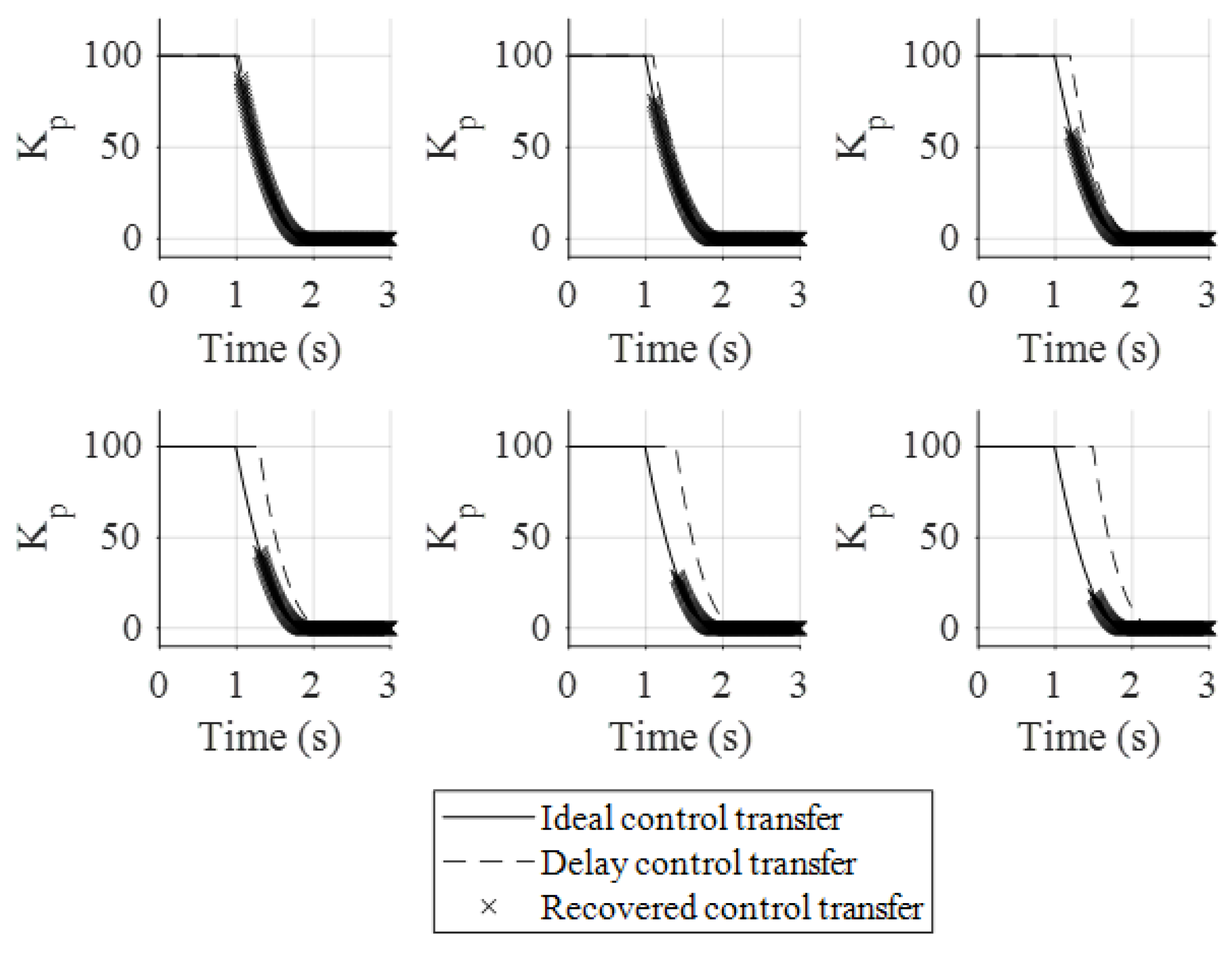
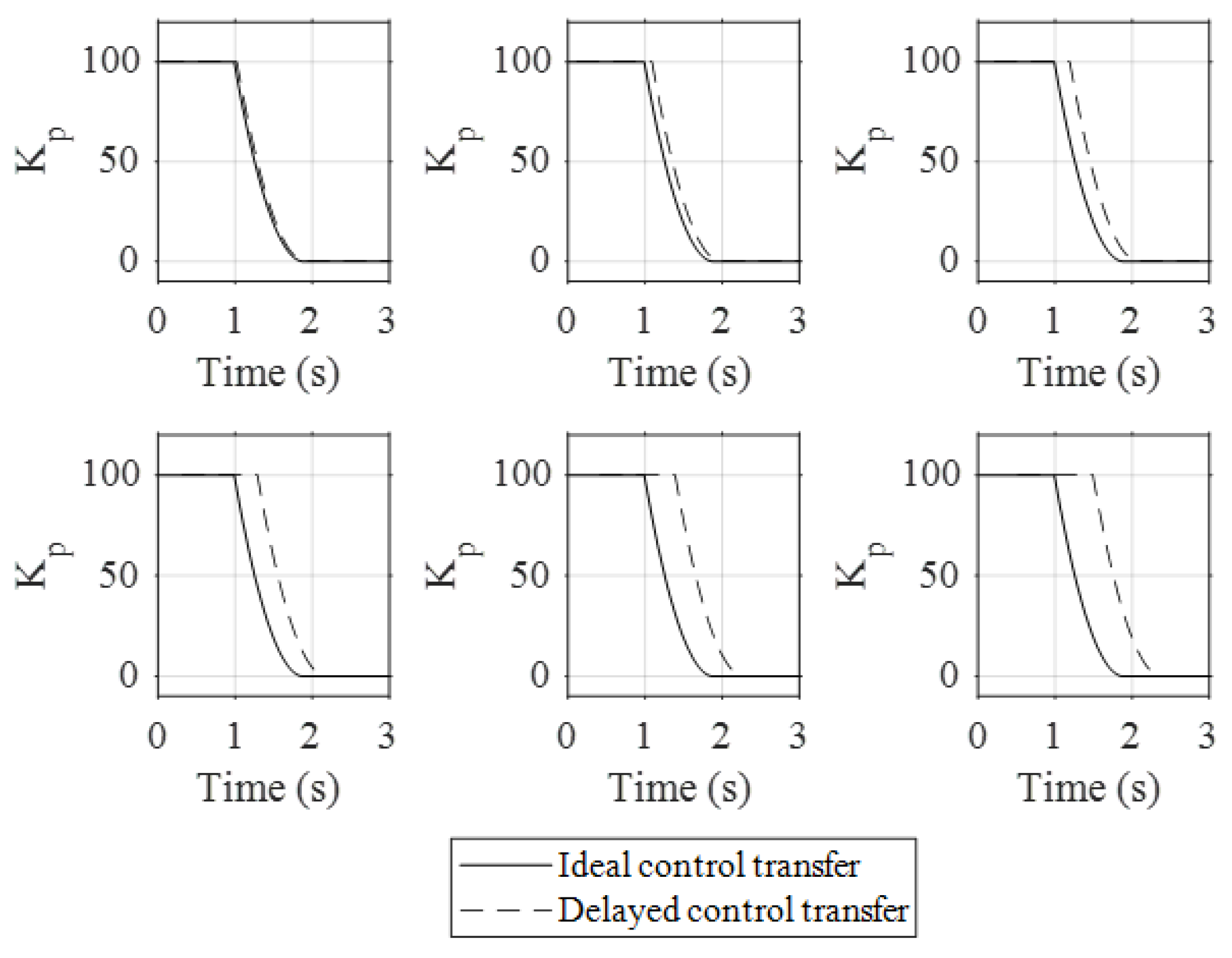
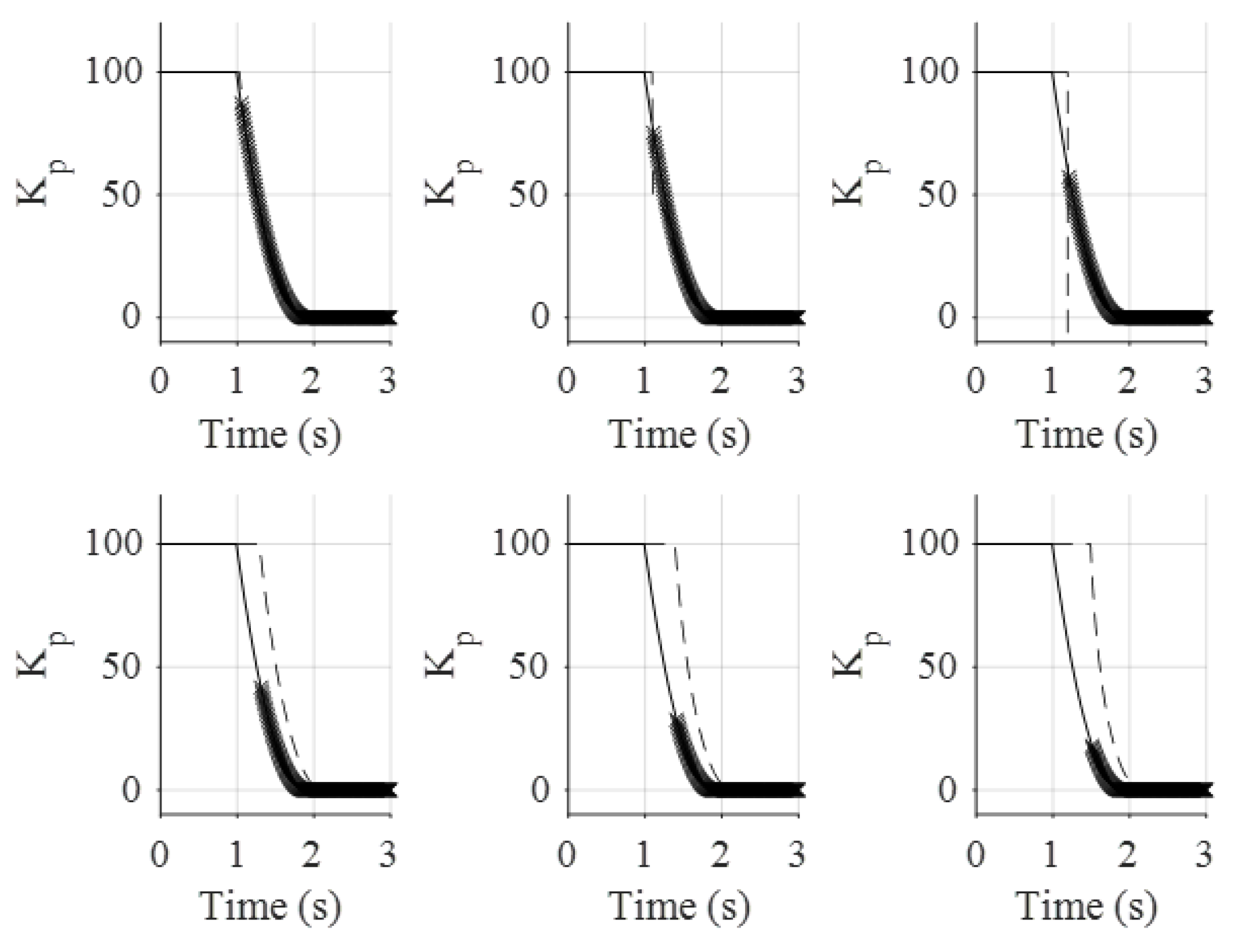
4.3. Authority Transfer According to the Communication Delay
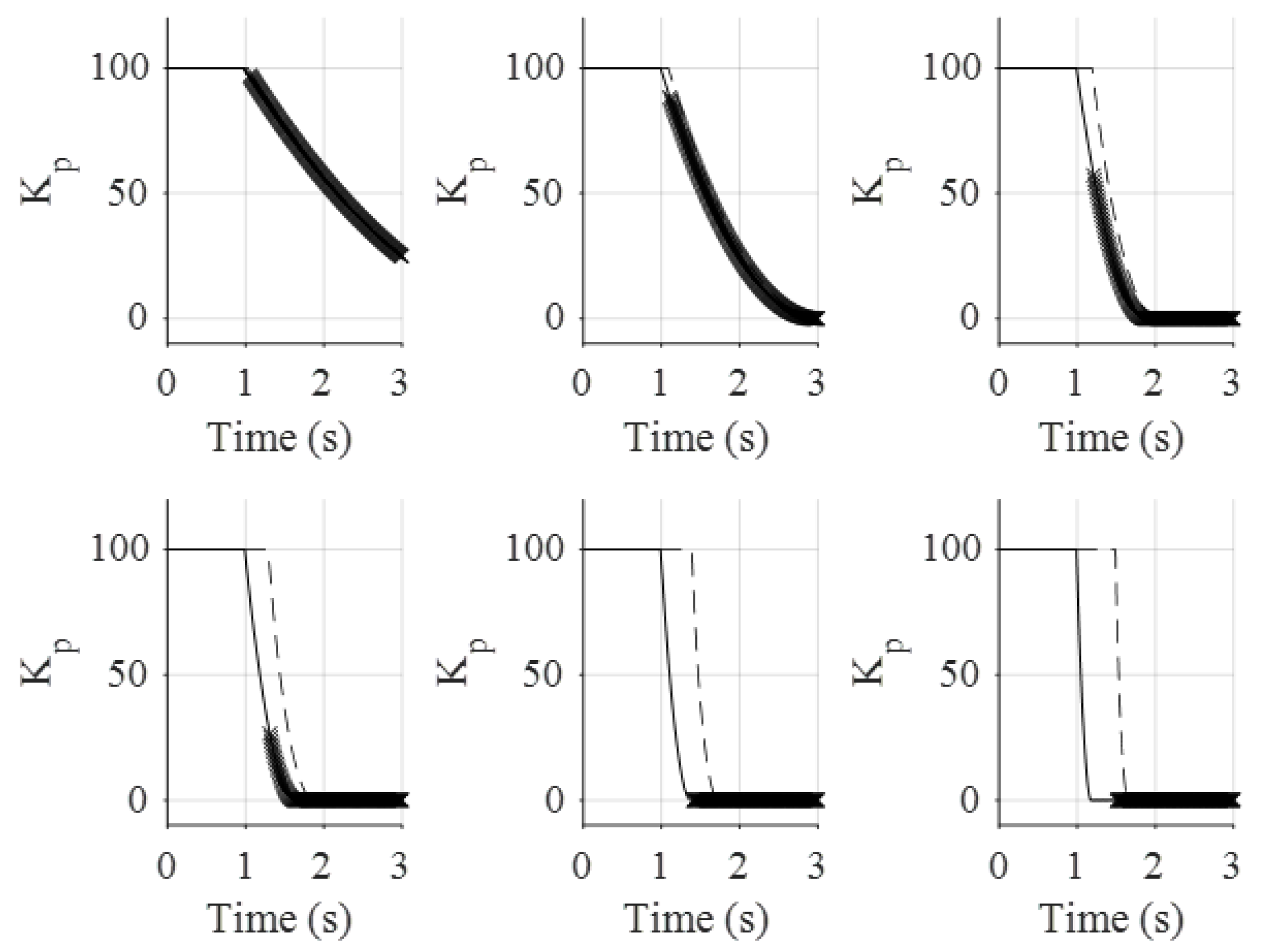
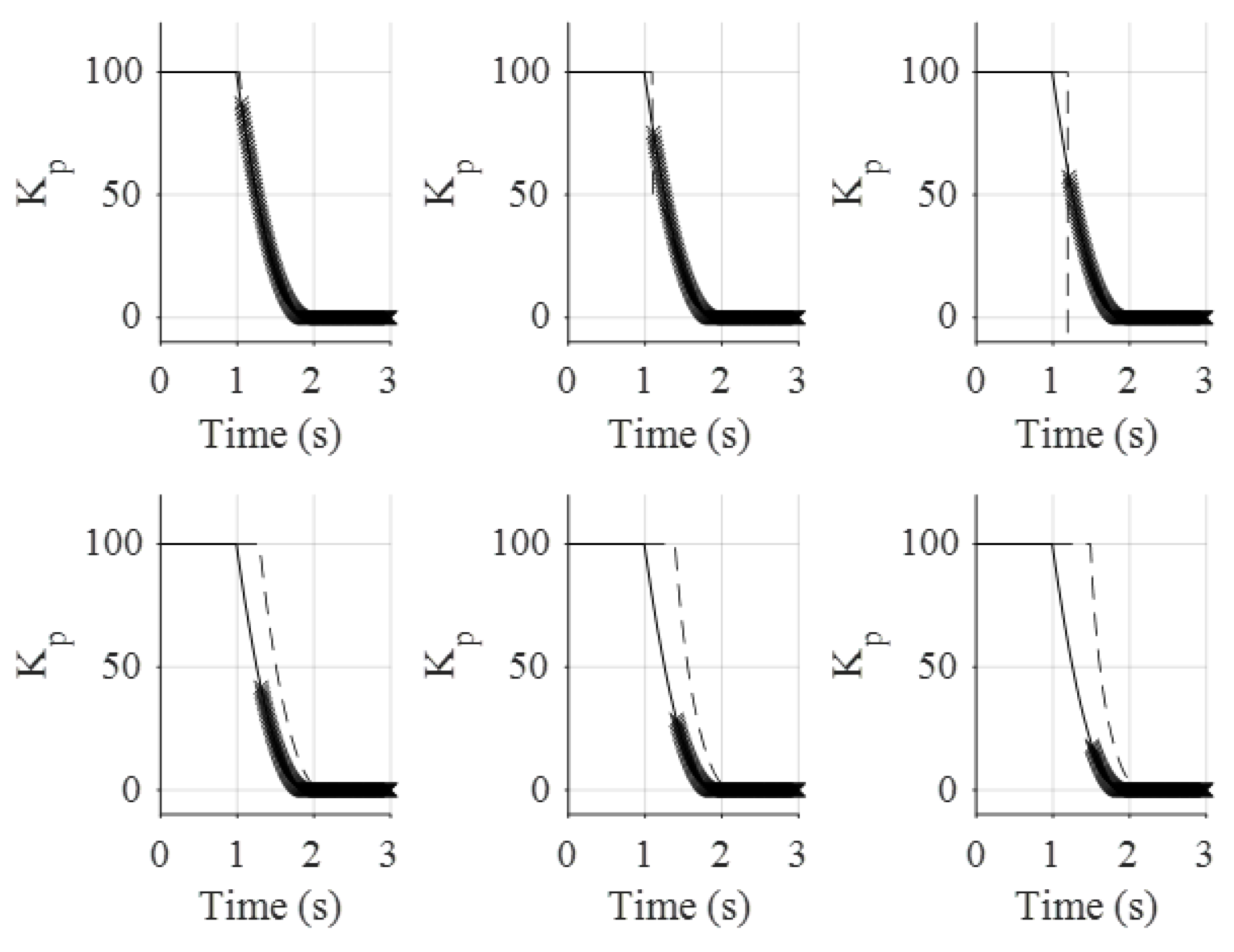
4.4. Simulation Results Based on Condition
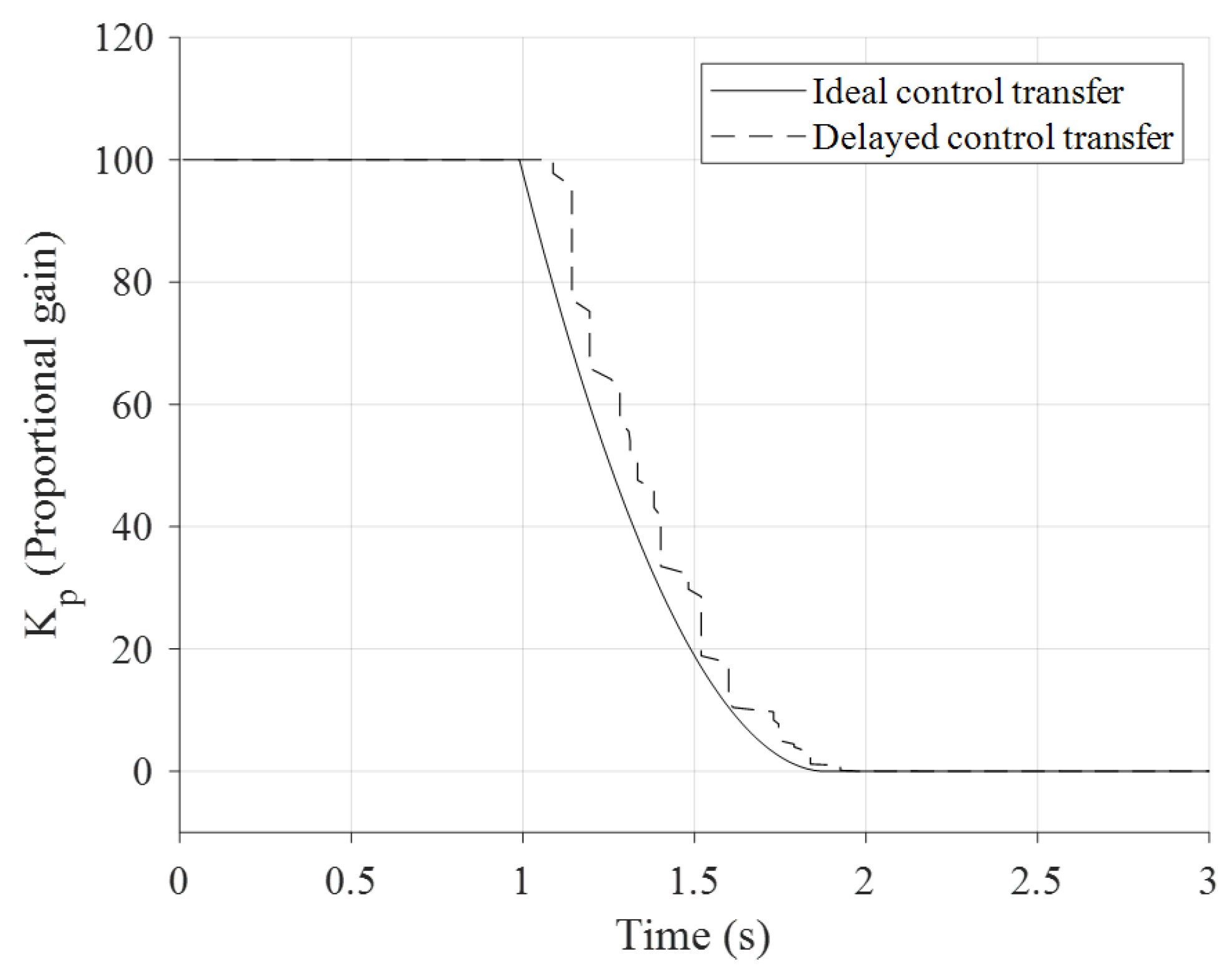
4.5. Control Transition Method Using the Proposed Method
5. Discussions
5.1. Communication Delay Depending on Control Position
5.2. Criteria for Communication Delays That Allow Teleoperation
5.3. Teleoperation Method Considering Communication Delay
5.4. How to Protect against Malicious Cyberattacks
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Andalibi, M.; Shourangizhaghighi, A.; Hajihosseini, M.; Madani, S.S.; Ziebert, C.; Boudjadar, J. Design and Simulation-Based Optimization of an Intelligent Autonomous Cruise Control System. Computers 2023, 12, 84. [Google Scholar] [CrossRef]
- Teixeira, F.B.; Ferreira, B.M.; Moreira, N.; Abreu, N.; Villa, M.; Loureiro, J.P.; Cruz, N.A.; Alves, J.C.; Ricardo, M.; Campos, R. A novel simulation platform for underwater data muling communications using autonomous underwater vehicles. Computers 2021, 10, 119. [Google Scholar] [CrossRef]
- Sun, P.; Kretzschmar, H.; Dotiwalla, X.; Chouard, A.; Patnaik, V.; Tsui, P.; Guo, J.; Zhou, Y.; Chai, Y.; Caine, B.; et al. Scalability in perception for autonomous driving: Waymo open dataset. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2446–2454. [Google Scholar]
- Kato, S.; Takeuchi, E.; Ishiguro, Y.; Ninomiya, Y.; Takeda, K.; Hamada, T. An open approach to autonomous vehicles. IEEE Micro 2015, 35, 60–68. [Google Scholar] [CrossRef]
- Kato, S.; Tokunaga, S.; Maruyama, Y.; Maeda, S.; Hirabayashi, M.; Kitsukawa, Y.; Monrroy, A.; Ando, T.; Fujii, Y.; Azumi, T. Autoware on board: Enabling autonomous vehicles with embedded systems. In Proceedings of the 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018; pp. 287–296. [Google Scholar]
- Raju, V.M.; Gupta, V.; Lomate, S. Performance of open autonomous vehicle platforms: Autoware and Apollo. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Bombay, India, 29–31 March 2019; pp. 1–5. [Google Scholar]
- State of California Department of Motor Vehicle. Autonomous Vehicle Disengagement Reports 2022; State of California Department of Motor Vehicle: Sacramento, CA, USA, 2022.
- Gless, S.; Silverman, E.; Weigend, T. If robots cause harm, who is to blame? Self-driving cars and criminal liability. New Crim. Law Rev. 2016, 19, 412–436. [Google Scholar] [CrossRef]
- De Bruyne, J.; Werbrouck, J. Merging self-driving cars with the law. Comput. Law Secur. Rev. 2018, 34, 1150–1153. [Google Scholar] [CrossRef]
- Anderson, J.M.; Nidhi, K.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Sivak, M.; Schoettle, B. Road Safety with Self-Driving Vehicles: General Limitations and Road Sharing with Conventional Vehicles; Technical Report; University of Michigan, Ann Arbor, Transportation Research Institute: Ann Arbor, MI, USA, 2015. [Google Scholar]
- Bhardwaj, A.; Ghasemi, A.H.; Zheng, Y.; Febbo, H.; Jayakumar, P.; Ersal, T.; Stein, J.L.; Gillespie, R.B. Who’s the boss? Arbitrating control authority between a human driver and automation system. Transp. Res. Part F Traffic Psychol. Behav. 2020, 68, 144–160. [Google Scholar] [CrossRef]
- Benloucif, M.A.; Nguyen, A.T.; Sentouh, C.; Popieul, J.C. A new scheme for haptic shared lateral control in highway driving using trajectory planning. IFAC-PapersOnLine 2017, 50, 13834–13840. [Google Scholar] [CrossRef]
- Abbink, D.A.; Mulder, M.; Boer, E.R. Haptic shared control: Smoothly shifting control authority? Cogn. Technol. Work 2012, 14, 19–28. [Google Scholar] [CrossRef]
- Flemisch, F.; Heesen, M.; Hesse, T.; Kelsch, J.; Schieben, A.; Beller, J. Towards a dynamic balance between humans and automation: Authority, ability, responsibility and control in shared and cooperative control situations. Cogn. Technol. Work 2012, 14, 3–18. [Google Scholar] [CrossRef]
- Sonoda, K.; Okada, K.; Sato, K.; Abe, G.; Wada, T. Does Shared Mode Improve Steering and Vehicle Motions during Control Transition from Automated to Manual Driving in Real Passenger Car? IEEE Access 2022, 10, 85880–85890. [Google Scholar] [CrossRef]
- Huntsberger, T.; Rodriguez, G.; Schenker, P.S. Robotics challenges for robotic and human mars exploration. Robotics 2000, 2000, 340–346. [Google Scholar]
- Lindemann, R.A.; Voorhees, C.J. Mars Exploration Rover mobility assembly design, test and performance. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; Volume 1, pp. 450–455. [Google Scholar]
- Kang, L.; Zhao, W.; Qi, B.; Banerjee, S. Augmenting self-driving with remote control: Challenges and directions. In Proceedings of the 19th International Workshop on Mobile Computing Systems & Applications, Tempe, AZ, USA, 12–13 February 2018; pp. 19–24. [Google Scholar]
- SAE-J3016; Surface Vehicle Recommended Practive, Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems. SAE International: Warrendale, PA, USA, 2018.
- BSIPAS1880:2; Centre for Connected and Autonomous Vehicles: Guidelines for Developing and Assessing Control Systems for Automated Vehicles. British Standards Institution: London, UK, 2020.
- Majstorović, D.; Hoffmann, S.; Pfab, F.; Schimpe, A.; Wolf, M.M.; Diermeyer, F. Survey on Teleoperation Concepts for Automated Vehicles. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 1290–1296. [Google Scholar]
- Bensoussan, S.; Parent, M. Computer-aided teleoperation of an urban vehicle. In Proceedings of the 1997 8th International Conference on Advanced Robotics. Proceedings. ICAR’97, Monterey, CA, USA, 7–9 July 1997; pp. 787–792. [Google Scholar]
- Gnatzig, S.; Chucholowski, F.; Tang, T.; Lienkamp, M. A System Design for Teleoperated Road Vehicles. In Proceedings of the International Conference on Informatics in Control, Automation and Robotics, Reykjavík, Iceland, 29–31 July 2013; Volume 2, pp. 231–238. [Google Scholar]
- Qiao, B.; Li, H.; Wu, X. Intelligent-assist algorithm for remote shared-control driving based on game theory. J. Shanghai Jiaotong Univ. (Sci.) 2021, 26, 615–625. [Google Scholar] [CrossRef]
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A predictor-based framework for delay compensation in networked closed-loop systems. IEEE/ASME Trans. Mechatronics 2018, 23, 2482–2493. [Google Scholar] [CrossRef]
- Bemporad, A. Predictive control of teleoperated constrained systems with unbounded communication delays. In Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No. 98CH36171), Tampa, FL, USA, 18 December 1998; Volume 2, pp. 2133–2138. [Google Scholar]
- Wada, T.; Kondo, R. Shared authority mode: Connecting automated and manual driving for smooth authority transfer. In Proceedings of the Internatioanl Symposium on Future Active Safety Technology toward Zero Traffic Accident (FAST-Zero), Nara, Japan, 18–21 September 2017. [Google Scholar]
- Schimpe, A.; Diermeyer, F. Steer with me: A predictive, potential field-based control approach for semi-autonomous, teleoperated road vehicles. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Zheng, Y.; Brudnak, M.J.; Jayakumar, P.; Stein, J.L.; Ersal, T. Evaluation of a predictor-based framework in high-speed teleoperated military UGVs. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 561–572. [Google Scholar] [CrossRef]
- Saito, T.; Wada, T.; Sonoda, K. Control authority transfer method for automated-to-manual driving via a shared authority mode. IEEE Trans. Intell. Veh. 2018, 3, 198–207. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | - | 0.5 |
| 2 | 100 | 22 | - | 0.5 |
| 3 | 200 | 22 | - | 0.5 |
| 4 | 300 | 22 | - | 0.5 |
| 5 | 400 | 22 | - | 0.5 |
| 6 | 500 | 22 | - | 0.5 |
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 5 | 1000 | 0.5 |
| 2 | 100 | 10 | 1000 | 0.5 |
| 3 | 200 | 22 | 1000 | 0.5 |
| 4 | 300 | 30 | 1000 | 0.5 |
| 5 | 400 | 50 | 1000 | 0.5 |
| 6 | 500 | 100 | 1000 | 0.5 |
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | 100 | 0.5 |
| 2 | 100 | 22 | 300 | 0.5 |
| 3 | 200 | 22 | 700 | 0.5 |
| 4 | 300 | 22 | 1000 | 0.5 |
| 5 | 400 | 22 | 2000 | 0.5 |
| 6 | 500 | 22 | 3000 | 0.5 |
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | 1000 | 0.1 |
| 2 | 100 | 22 | 1000 | 0.3 |
| 3 | 200 | 22 | 1000 | 0.5 |
| 4 | 300 | 22 | 1000 | 0.7 |
| 5 | 400 | 22 | 1000 | 0.9 |
| 6 | 500 | 22 | 1000 | 1.0 |
| Simulation Trial | Delay (ms) | Gain (G) | Gain () | |
|---|---|---|---|---|
| 1 | 34 | 22 | 1000 | 0.5 |
| 2 | 100 | 22 | 1000 | 0.5 |
| 3 | 200 | 22 | 1000 | 0.5 |
| 4 | 300 | 22 | 1000 | 0.5 |
| 5 | 400 | 22 | 1000 | 0.5 |
| 6 | 500 | 22 | 1000 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, T.; Hwang, M.; Kim, E.; Cha, H. Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay. Computers 2023, 12, 228. https://doi.org/10.3390/computers12110228
Lim T, Hwang M, Kim E, Cha H. Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay. Computers. 2023; 12(11):228. https://doi.org/10.3390/computers12110228
Chicago/Turabian StyleLim, Taeyoon, Myeonghwan Hwang, Eugene Kim, and Hyunrok Cha. 2023. "Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay" Computers 12, no. 11: 228. https://doi.org/10.3390/computers12110228
APA StyleLim, T., Hwang, M., Kim, E., & Cha, H. (2023). Authority Transfer According to a Driver Intervention Intention Considering Coexistence of Communication Delay. Computers, 12(11), 228. https://doi.org/10.3390/computers12110228