



L-PRNU: Low-Complexity Privacy-Preserving PRNU-Based Camera Attribution Scheme


Abstract
:1. Introduction
- 1.
- Low computational overhead;
- 2.
- No need for decryption;
- 3.
- Privacy-preserving.
2. Background and Related Work
2.1. Background
PRNU-Based Source Camera Attribution [1,2,3,4,5]
2.2. Related Work
e-PRNU [10,15]
- 1.
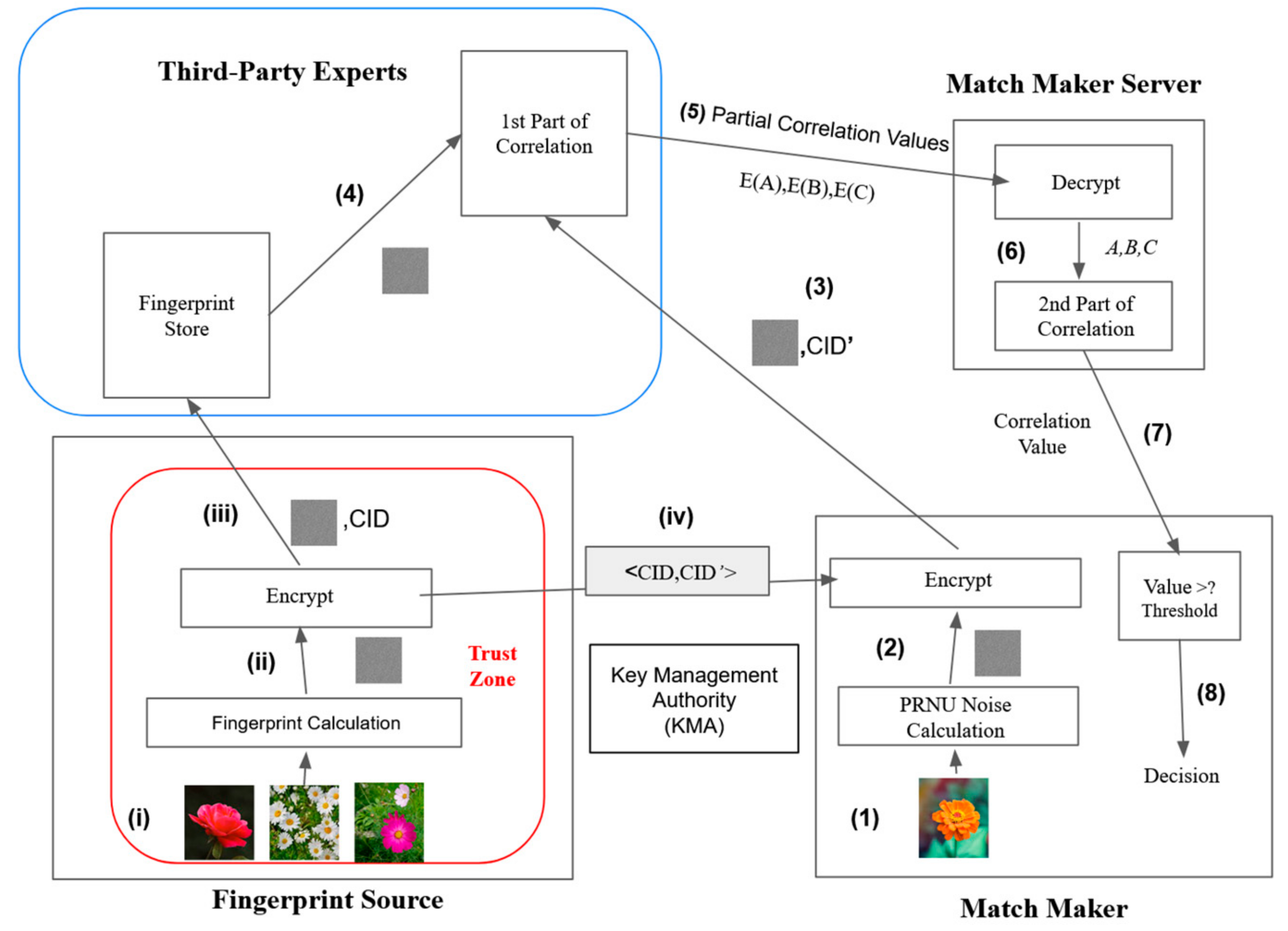
- Fingerprint Source: This entity, an organization affiliated with law enforcement, extracts camera fingerprints from a set of known images. It is assumed to be trustworthy and secure. To link the fingerprints with online photos, the fingerprints are encrypted using BGN encryption and transmitted to the Third-Party Expert fingerprint storage. The encryption key is provided by the KMA;
- 2.
- Third-Party Expert: This entity stores all the encrypted fingerprints received from the Fingerprint Source. Privacy leakage is a concern, so this entity should not have knowledge of the fingerprint owners. The Third-Party Expert requires ample storage space and sufficient computing power to handle high-computation tasks. According to the paper, this entity can be a public cloud service like Amazon or Google;
- 3.
- Match Maker: Representing a trusted organization such as a law enforcement authority or judge, the Match Maker aims to match a given picture with a known set of pictures. While the Fingerprint Source manages the known set of pictures, the Match Maker extracts the noise from the picture and encrypts the fingerprint using BGN encryption, similar to the Fingerprint Source. Ultimately, the Match Maker or judge will make a judgment using the threshold and the value provided by the Match Maker Server;
- 4.
- Match Maker Server: This entity operates under the control of the Match Maker and is considered secure. Its role is to decrypt the first part correlation sent by the Third-Party Expert. Additionally, the Match Maker Server performs the second part of the correlation to obtain the actual correlation value. The Match Maker Server requires some computational ability for decryption but does not need to solve complex problems;
- 5.
- KMA: This trusted entity is responsible for generating the public and private keys CID, CID’ used in BGN encryption.
3. Materials and Methods
3.1. Main Scheme
3.1.1. System Model
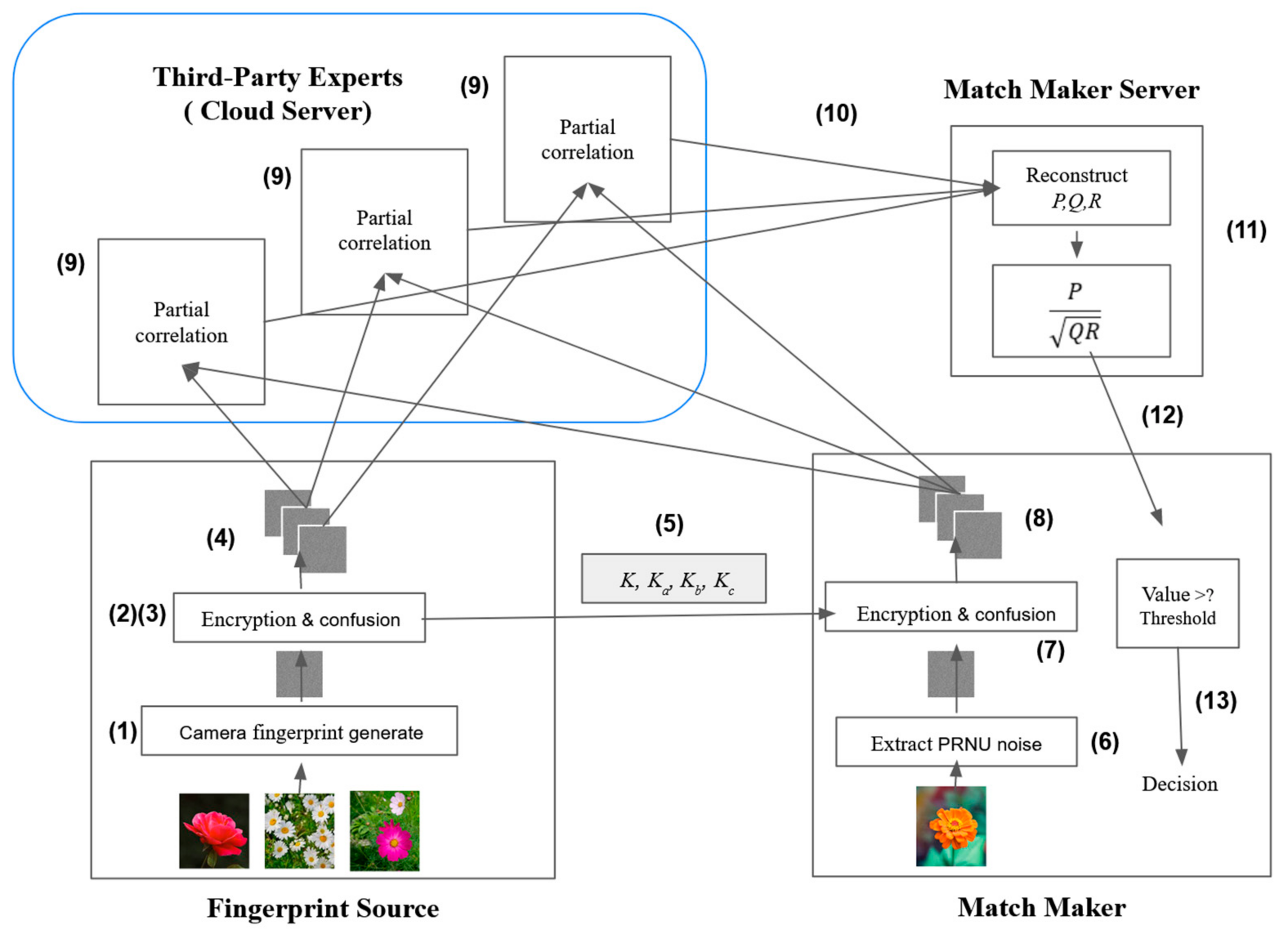
- Fingerprint Source: This entity is considered to be a trustable entity. It is responsible to create a key K and (at least) three disorder keys, Ka, Kb, and Kc, so that the Match Maker can encrypt the unknown photo in the same way. While the Match Maker extracts the PRNU noise from the unknown photo, the Fingerprint makes the fingerprint out of the known set of photos. In addition, it encrypts the fingerprint into three encrypted photos.
- Third-Party Expert: The Third-Party Expert consists of multiple organizations or cloud services with powerful computational capabilities, but it is not inherently trusted. Its task involves generating partial correlations from 2 × 3 encrypted photos received from the Fingerprint Source and the Match Maker. Once the partial correlation numbers are calculated, they are sent to the Match Maker Server. This role can be assigned to different organizations or a single organization.
- Match Maker Server: The Match Maker Server and the Match Maker both operate within the jurisdiction of law enforcement authorities. While the Third-Party Expert handles most of the computation, the Match Maker Server combines the 21 partial correlation numbers with the final correlation. Due to the relatively low complexity of the encryption, solving this problem requires only occasional computational power. Once the combination process is completed, the Match Maker Server provides the final correlation back to the Match Maker.
- Match Maker: This entity represents the law enforcement authority or the judge. The Match Maker uses the key K and three disorder keys, Ka, Kb, and Kc, provided by the Fingerprint Source to encrypt the unknown evidence into three encrypted photos. At the conclusion of the entire scheme, the Match Maker combines the final correlation with the camera’s threshold to make the ultimate judgment.
3.1.2. The Process
- Fingerprint Source:
- 1.
- A set of known images that came from the same camera will be collected. All the images will be denoised and extracted into a camera fingerprint F.
- 2.
- Fingerprint Source uses the key K to encrypt the camera fingerprint into three encrypted photos A, B, and C.
- 3.
- The encrypted photos will be confused via three disorder keys Ka, Kb, and Kc. Making , , , , and . Obtaining six photos that are encrypted and disarranged.
- 4.
- Distribute the encrypted photos to the Third-Party Expert according to the Division algorithm.
- 5.
- Fingerprint Source passes the key K and three disorder keys Ka, Kb, and Kc to Match Make via a secret channel.
- Match Maker:
- 6.
- Extract the PRNU noise picture from an unknown evidence image and encrypt it with K into three encrypt photos , , and .
- 7.
- Disarrange the three encrypted PRNU noise pictures into six confusion images with three disorder keys Ka, Kb, and Kc: , , , , and .
- 8.
- Distribute the encrypted images to the Third-Party Expert according to the Division algorithm.
- Third-Party Expert:
- 9.
- Each of the nodes of the Third-Party Expert will receive the encrypted images that their task assigns. While some are from the Fingerprint Source, the others are from the Match Maker. Each node will receive the mission that they are assigned, noting that they will not know which images (A, or B, or C) they received.
- 10.
- Occurs after each node finishes making the partial correlation number according to equation (8). They will send the numbers to the Match Maker Server.
- Match Maker Server:
- 11.
- After receiving all the partial correlation numbers, the Match Maker will combine them into the real correlation coefficient with the combine algorithm.
- 12.
- The Match Maker Server will send the real correlation coefficient back to the Match Maker
- Match Maker:
- 13.
- The final decision is made by the Match Maker based on the final correlation value received from the Match Maker server. If the correlation value is equal to or above the camera sensor’s PRNU threshold, the unknown image is proved to be taken from the suspected camera or else not.
3.2. Solution Details
3.2.1. Algorithm 1: Disorder Algorithm
| Algorithm 1 Disorder algorithm |
| Input: an image A with size m × n, the permutation key K with gcd (K, mn) = 1. |
| Output: the rearrange image K(A). |
| Step1. For any pixel (i, j) of A, do Step 2–3. |
| Step2. Let Q = K(n(i − 1) + j) mod mn. |
| Step3. Let the value of pixel (⌊Q/n⌋, Q mod n) of K(A) be the value of pixel (i, j) of A. |
3.2.2. Algorithm 2: Division Algorithm
| Algorithm 2 Division |
| Step1. The entity that receives three images A, B, C that are encrypted. |
| Step2. The entity computes Ka(A), Kc(A), Ka(A′), Kc(A′), Ka(B), Kb(B), Ka(B′), Kb(B′), Kb(C), Kc(C), Kb(C′), Kc(C′) via Algorithm 1 with disorder keys Ka, Kb, and Kc. |
| Step3. The entity sends images Ka(A), Ka(A′), Ka(B), Ka(B′) to the first Third-Party Expert; Kb(B), Kb(B′), Kb(C), Kb(C′) to the second Third-Party Expert; Kc(A), Kc(A′), Kc(C), Kc(C′) to the third Third-Party Expert. |
3.2.3. Algorithm 3: Combine Algorithm
| Algorithm 3 Combine algorithm |
| Step1. Collect all the partial numbers r1–r21 from the third-party expert. |
| Step2. Calculate P, Q, and R with Formula (10)–(12). |
| Step3. Reconstruct the origin correlation number . |
4. Results
4.1. Computation Analysis
4.2. Security Analysis
- Privacy Preservation: The L-PRNU scheme employs multiple techniques, such as the shuffling of pixel positions and polynomial encryption, to ensure the preservation of privacy. These measures prevent collusion among third-party experts and make it extremely challenging to infer the true correlation value or reconstruct the original camera fingerprint. By encrypting the camera fingerprint and PRNU noise images using polynomial encryption, the sensitive data is transformed into an unintelligible form that can only be deciphered with the specific decryption key K (ranging from 2 to ), which is difficult to guess. Additionally, the scheme introduces shuffling to further obfuscate the images, making it virtually impossible for unauthorized parties to gain access to the original content. These privacy-preserving techniques are crucial in safeguarding the identities of camera owners and preventing the unauthorized disclosure of their personal information.
- Homomorphic Property: The scheme leverages the homomorphic property of encryption, specifically in the BGN encryption used in previous schemes. The homomorphic property allows for dividing the correlation calculation into some parts without affecting the final correlation value. This property ensures that the encryption does not compromise the integrity or accuracy of the correlation calculations while maintaining privacy.
- Different Disorder Keys: The scheme utilizes disorder keys to further enhance security. The encryption images are confused with distinct disorder keys, making it difficult for Third-Party Experts to correlate the encrypted images and reveal sensitive information about the camera fingerprint or PRNU noise, even if all Third-Party Experts colluded. This additional layer of pixel confusion adds complexity to potential attacks and enhances the security of the scheme.
- Secure Entities: The scheme defines various entities involved in the process, such as the Fingerprint Source, Third-Party Experts, Match Maker, and Match Maker Server. These entities have specific roles and responsibilities in the scheme, ensuring that the sensitive data is handled by trusted and secure parties. The proper management and authentication of these entities are essential for maintaining the overall security of the scheme.
- Highly Secure Key Management: In the L-PRNU scheme, all the keys (K, Ka, Kb, Kc) are exclusively transferred between trusted entities (Fingerprint Source and Match Maker). Furthermore, the scheme does not necessitate decryption, eliminating any potential risks associated with key leakage during the decryption process. This ensures the confidentiality and integrity of the keys, further bolstering the overall security of the scheme.
5. Discussion
- First and foremost, our innovative approach achieves a remarkable computation time reduction, exceeding ten times the speed of the existing e-PRNU scheme. With our polynomial encryption method, it significant accelerates the previously burdensome runtime computational overhead associated with BGN encryption in e-PRNU.
- Moreover, compared with the BGN decryption in the e-PRNU scheme, our scheme dispenses the need for decryption, thanks to the application of polynomial encryption and pixel disorder, which leave the correlation value unaltered. This breakthrough obviates the necessity to transmit critical pixels to a third party, a requirement of previous methods. By maintaining the original image format during transmission, we uphold the data integrity and preserve the visual information.
- Furthermore, as we enhance the computation speed, we continue to prioritize privacy preservation. Our approach places significant importance on safeguarding privacy by implementing pixel position shuffling. This not only discourages collaboration among external experts but also significantly hinders any efforts to determine the actual correlation value or reconstruct the original camera fingerprint. These crucial contributions collectively bolster the security and effectiveness of our L-PRNU scheme in addressing the privacy issues linked to personal camera fingerprints obtained from social media images.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bartlow, N.; Kalka, N.; Cukic, B.; Ross, A. Identifying sensors from fingerprint images. In Proceedings of the 2009 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Miami, FL, USA, 20–25 June 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Dirik, A.E.; Sencar, H.T.; Memon, N. Analysis of seam-carving-based anonymization of images against PRNU noise pattern-based source attribution. IEEE Trans. Inf. Forensics Secur. 2014, 9, 2277–2290. [Google Scholar] [CrossRef]
- Lukáš, J.; Fridrich, J.; Goljan, M. Detecting digital image forgeries using sensor pattern noise. In Security, Steganography, and Watermarking of Multimedia Contents VIII; SPIE: Washington, DC, USA, 2006; Volume 6072, pp. 362–372. [Google Scholar]
- Lukas, J.; Fridrich, J.; Goljan, M. Digital camera identification from sensor pattern noise. IEEE Trans. Inf. Forensics Secur. 2006, 1, 205–214. [Google Scholar] [CrossRef]
- Taspinar, S.; Mohanty, M.; Memon, N. PRNU-based camera attribution from multiple seam-carved images. IEEE Trans. Inf. Forensics Secur. 2017, 12, 3065–3080. [Google Scholar] [CrossRef]
- Bertini, F.; Sharma, R.; Iannì, A.; Montesi, D. Smartphone verification and user profiles linking across social networks by camera fingerprinting. In Proceedings of the Digital Forensics and Cyber Crime: 7th International Conference, ICDF2C 2015, Seoul, Republic of Korea, 6–8 October 2015; Revised Selected Papers 7. Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Fernández-Menduina, S.; Pérez-González, F. On the information leakage of camera fingerprint estimates. arXiv 2020, arXiv:2002.11162. [Google Scholar]
- Dirik, A.E.; Sencar, H.T.; Memon, N. Digital single lens reflex camera identification from traces of sensor dust. IEEE Trans. Inf. Forensics Secur. 2008, 3, 539–552. [Google Scholar] [CrossRef]
- Dirik, A.E.; Karaküçük, A. Forensic use of photo response non-uniformity of imaging sensors and a counter method. Opt. Express 2014, 22, 470–482. [Google Scholar] [CrossRef] [PubMed]
- Mohanty, M.; Zhang, M.; Asghar, M.R.; Russello, G. e-PRNU: Encrypted domain PRNU-based camera attribution for preserving privacy. IEEE Trans. Dependable Secur. Comput. 2019, 18, 426–437. [Google Scholar] [CrossRef]
- Shamir, A. How to share a secret. Commun. ACM 1979, 22, 612–613. [Google Scholar] [CrossRef]
- Pang, L.-J.; Wang, Y.-M. A new (t, n) multi-secret sharing scheme based on Shamir’s secret sharing. Appl. Math. Comput. 2005, 167, 840–848. [Google Scholar] [CrossRef]
- Jena, R.; Singh, P.; Mohanty, M. SSS-PRNU: Privacy-preserving PRNU based camera attribution using shamir secret sharing. arXiv 2021, arXiv:2106.07029. [Google Scholar]
- Mihcak, M.K.; Kozintsev, I.; Ramchandran, K. Spatially adaptive statistical modeling of wavelet image coefficients and its application to denoising. In Proceedings of the 1999 IEEE International Conference on Acoustics, Speech, and Signal Processing. Proceedings. ICASSP99 (Cat. No. 99CH36258), Phoenix, AZ, USA, 15–19 March 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 6. [Google Scholar]
- Mohanty, M.; Zhang, M.; Asghar, M.R.; Russello, G. PANDORA: Preserving privacy in PRNU-based source camera attribution. In Proceedings of the 2018 17th IEEE International Conference on Trust, Security and Privacy in Computing and Communications/12th IEEE International Conference on Big Data Science and Engineering (TrustCom/BigDataSE), New York, NY, USA, 1–3 August 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
| Kγ (A) | Kγ (B) | Kγ (C) | Kγ (A′) | Kγ (B′) | Kγ (C′) | ||
| Kγ (A) | r10 | r12 | r14 | r1 | r2 | r3 | |
| Kγ (B) | r12 | r11 | r13 | r4 | r5 | r6 | |
| Kγ (C) | r14 | r13 | r15 | r7 | r8 | r9 | |
| Kγ (A′) | r1 | r4 | r7 | r16 | r18 | r20 | |
| Kγ (B′) | r2 | r5 | r8 | r18 | r17 | r19 | |
| Kγ (C′) | r3 | r6 | r9 | r20 | r19 | r21 | |
| Picture Size | Testing Scheme | |
|---|---|---|
| L-PRNU | e-PRNU | |
| 100 × 100 | 4.448 s (#1 node) | 404.17 s (#1 node) |
| 1.482 s (#3 nodes) | 102.58 s (#4 nodes) | |
| 0.847 s (#6 nodes) | 26.60 s (#16 nodes) | |
| 720 × 720 | 65.709 s (#1 node) | |
| 21.903 s (#3 nodes) | >11 min | |
| 12.516 s (#6 nodes) | ||
| Entity | Computation Tasks | L-PRNU | e-PRNU |
|---|---|---|---|
| Match Maker server | Decrypt and Second Part of Correlation | 0.012 s | 23.05 s |
| Match Maker | Encrypt and PRNU Noise Calculation | 6.986 s | 42.73 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, A.; Juan, J.S.-T. L-PRNU: Low-Complexity Privacy-Preserving PRNU-Based Camera Attribution Scheme. Computers 2023, 12, 212. https://doi.org/10.3390/computers12100212
Huang A, Juan JS-T. L-PRNU: Low-Complexity Privacy-Preserving PRNU-Based Camera Attribution Scheme. Computers. 2023; 12(10):212. https://doi.org/10.3390/computers12100212
Chicago/Turabian StyleHuang, Alan, and Justie Su-Tzu Juan. 2023. "L-PRNU: Low-Complexity Privacy-Preserving PRNU-Based Camera Attribution Scheme" Computers 12, no. 10: 212. https://doi.org/10.3390/computers12100212
APA StyleHuang, A., & Juan, J. S.-T. (2023). L-PRNU: Low-Complexity Privacy-Preserving PRNU-Based Camera Attribution Scheme. Computers, 12(10), 212. https://doi.org/10.3390/computers12100212