Improved Virtual Gyroscope Technology Based on the ARMA Model

Abstract
1. Introduction
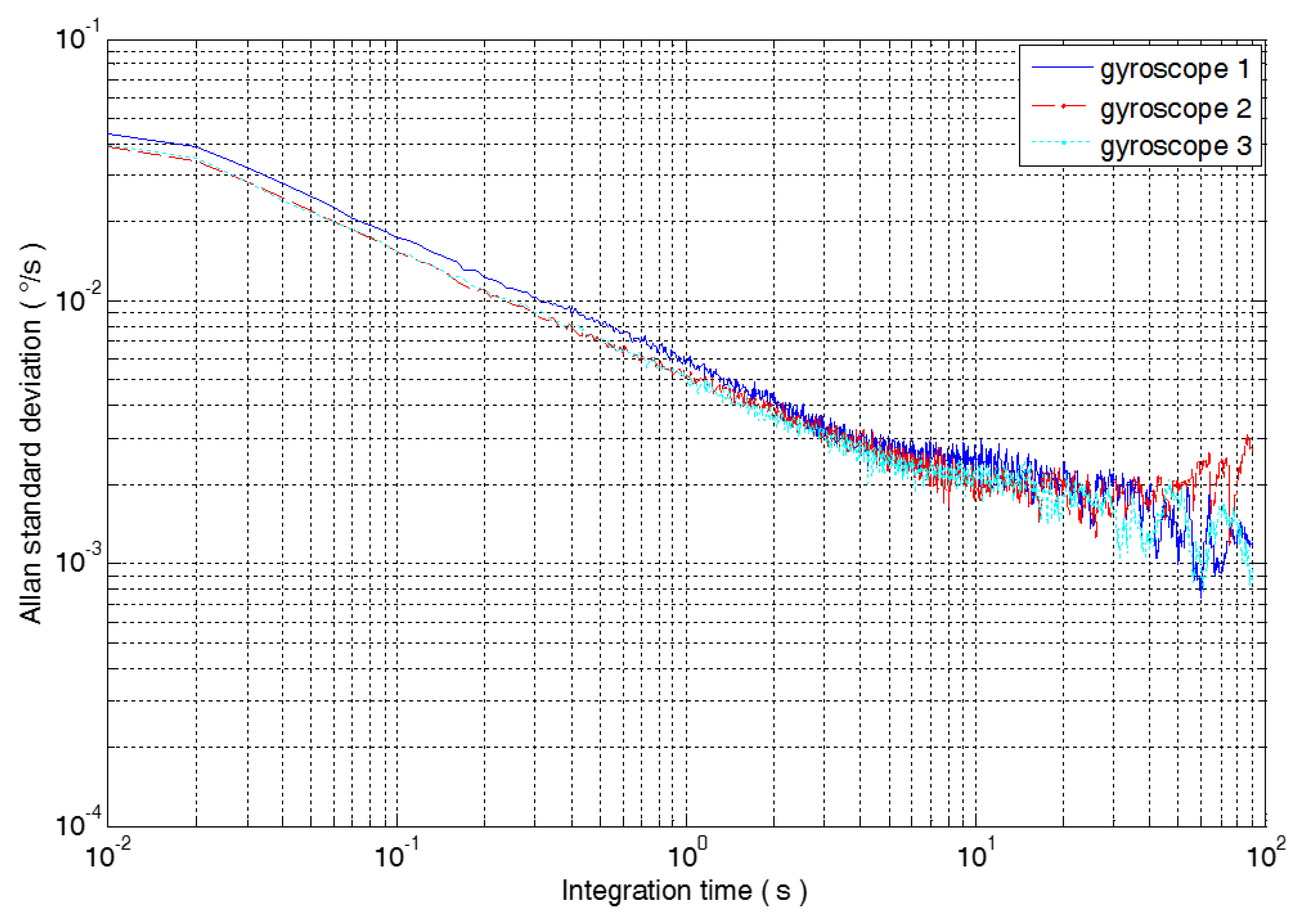
2. Allan Variance Analysis
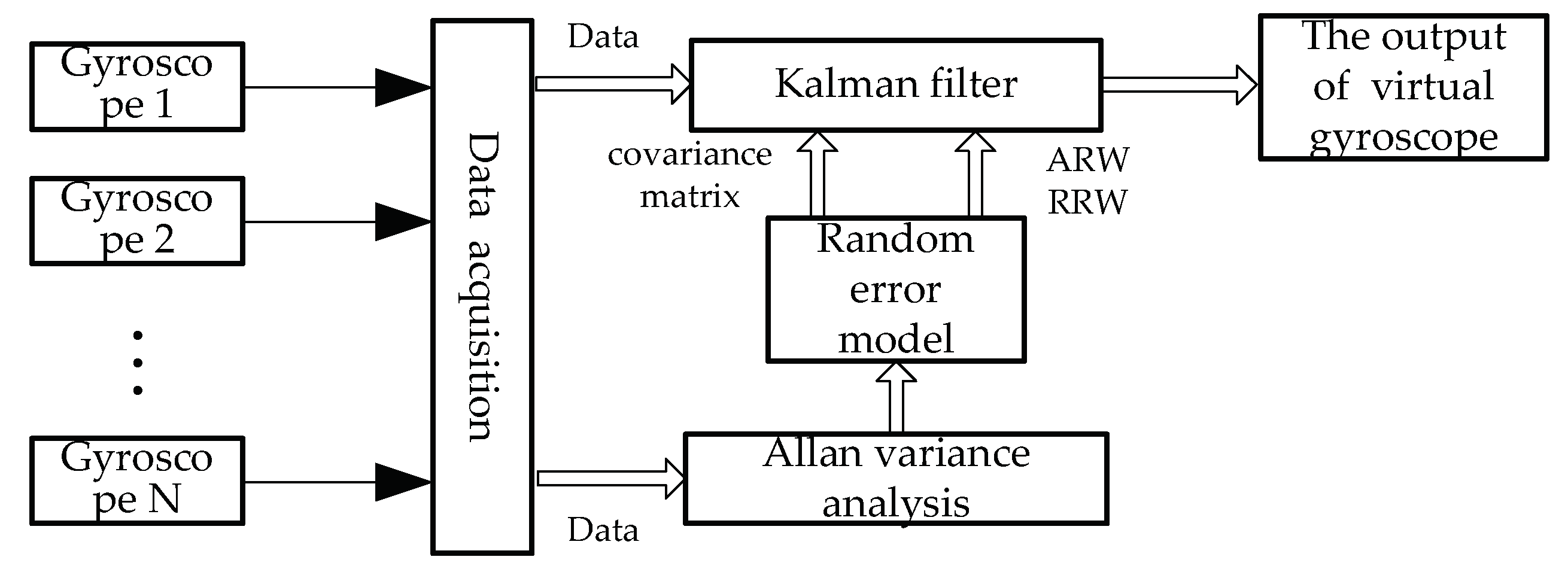
3. Conventional Virtual Gyroscope Technology
3.1. Random Error Model of MEMS Gyroscope
3.2. Design of Kalman Filter
4. Virtual Gyroscope Technology Based on ARMA Model
4.1. Modeling of ARMA Model
4.2. Improved Random Error Model
4.3. Improved Kalman Filter Design
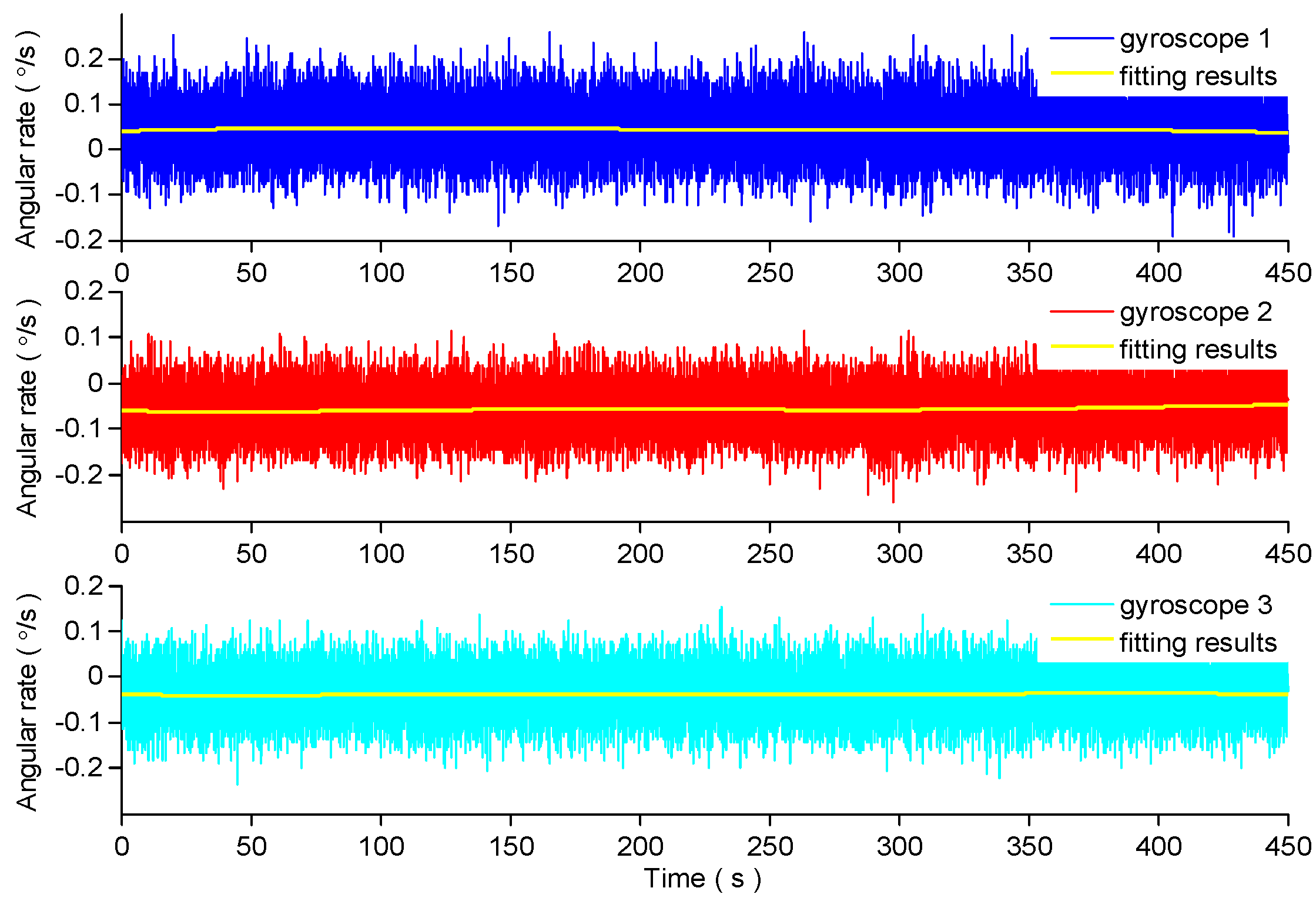
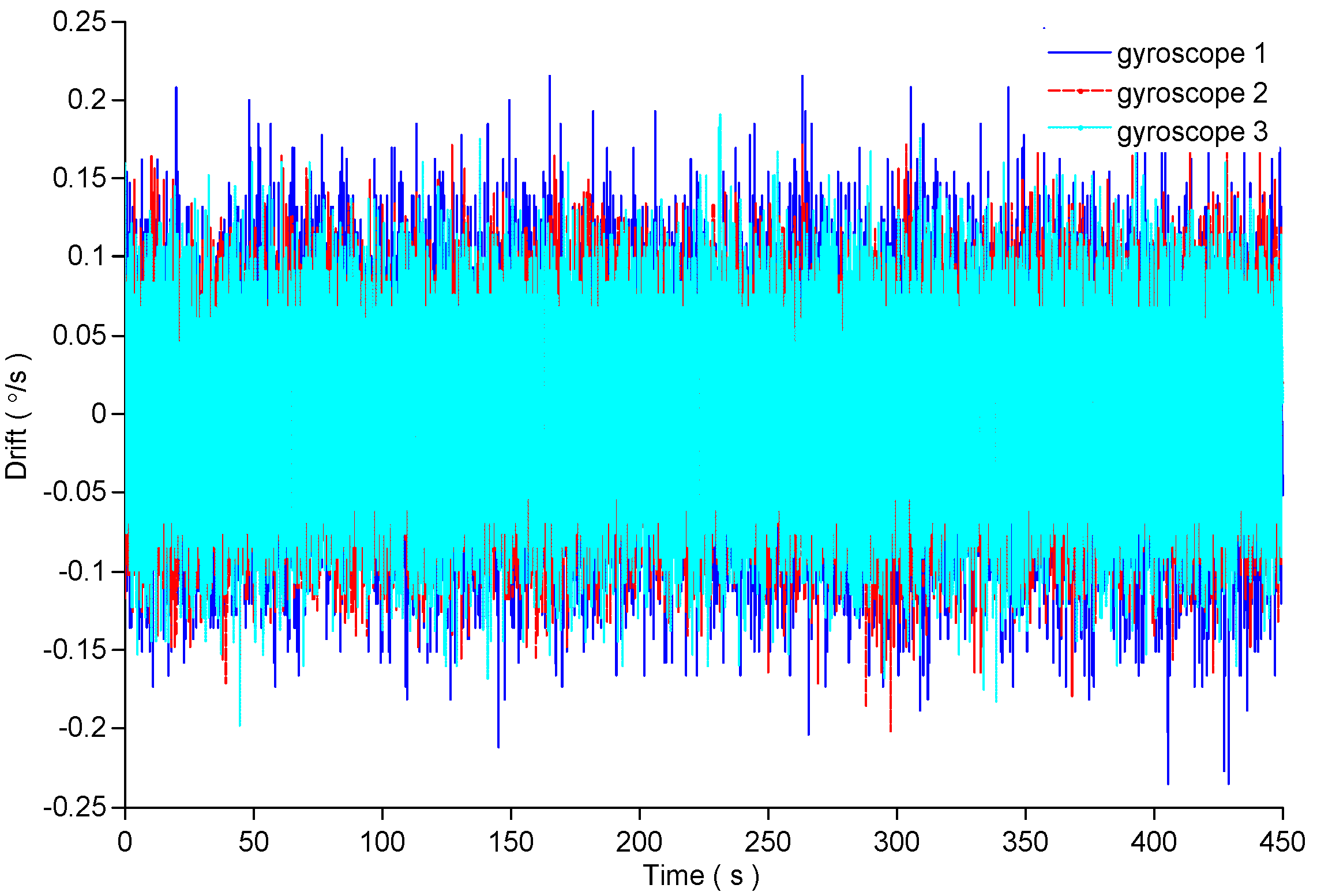
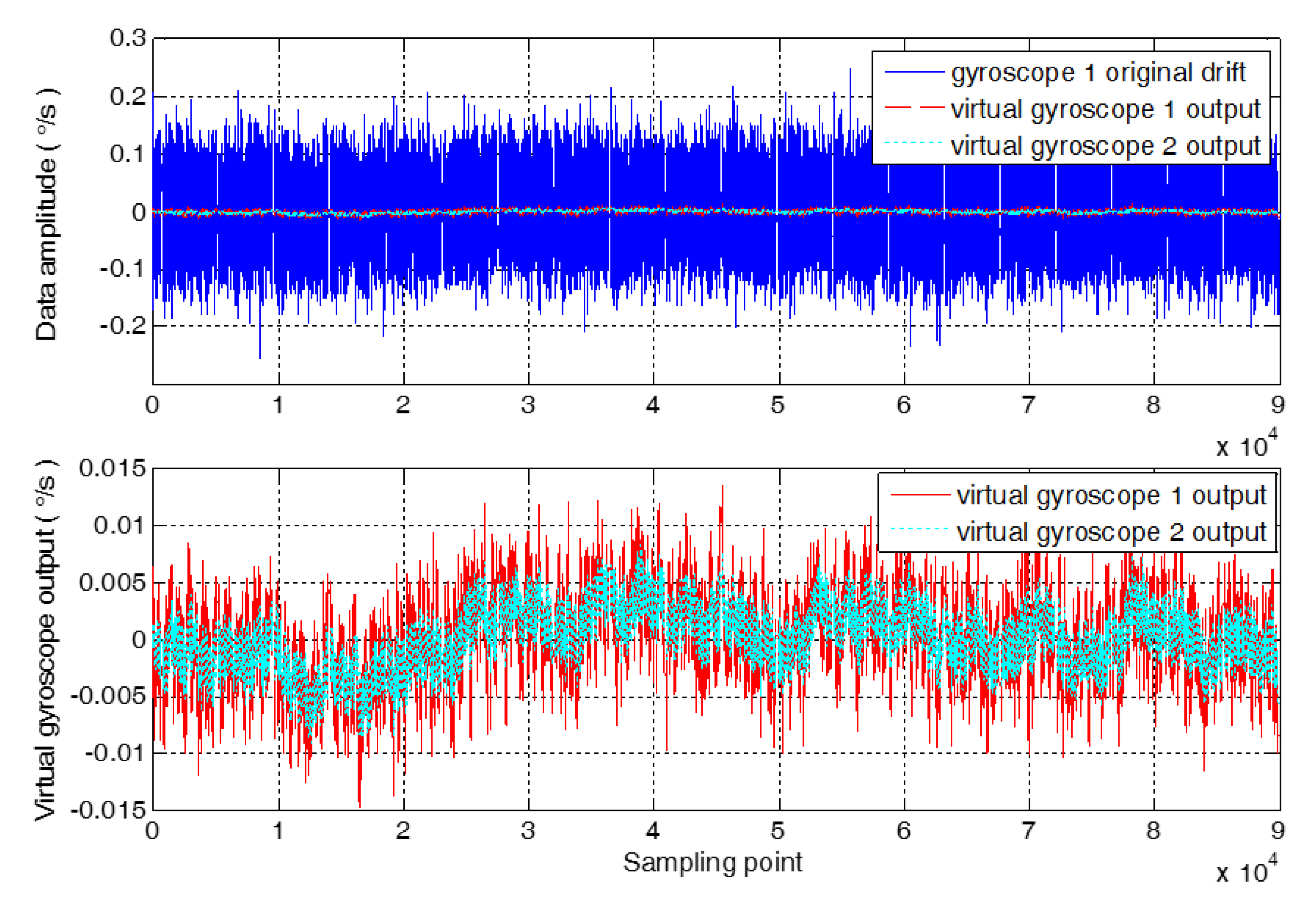
5. Test Analysis
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Tian, Z.; Fang, X.; Zhou, M.; Li, L. Smartphone-Based Indoor Integrated WiFi/MEMS Positioning Algorithm in a Multi-Floor Environment. Micromachines 2015, 6, 347–363. [Google Scholar] [CrossRef]
- Liu, J.; Shen, Q.; Qin, W. Signal Processing Technique for Combining Numerous MEMS Gyroscopes Based on Dynamic Conditional Correlation. Micromachines 2015, 6, 684–698. [Google Scholar] [CrossRef]
- Xue, L.; Jiang, C.; Wang, L.; Liu, J.; Yuan, W. Noise Reduction of MEMS Gyroscope Based on Direct Modeling or an Angular Rate Signal. Micromachines 2015, 6, 266–280. [Google Scholar] [CrossRef]
- David, S.B.; Scott, R.P. High Accuracy Inertial Sensors from Inexpensive Components. U.S. Patent No. 6,882,964, 6 March 2002. [Google Scholar]
- Zhang, P.; Chang, H.; Yuan, W.; Hu, M. On Improving the Accuracy of Micromachined Gyroscopes Based on Multi-Sensors Fusion. Chin. J. Sens. Actuator 2006, 19, 2226–2229. [Google Scholar]
- Ji, X.; Wang, S. Research on Signal Procession of Silicon Microgyroscope Array. J. Astronaut. 2009, 30, 235–239. [Google Scholar]
- Zhang, Y.; Ji, X.; Wang, S. Signal filtering method of silicon micro-gyroscope array. J. Southeast Univ. 2013, 43, 1222–1226. [Google Scholar]
- Liu, J.; Shen, Q.; Li, C.; Qin, W. Fusion method of MEMS gyro array signals based on optimal KF. Syst. Eng. Electron. 2016, 38, 2705–2710. [Google Scholar]
- Zhang, L.; Xiong, Z.; Liu, J.; Xu, J. Research on virtual gyro configuration of redundant MEMS system based on ANFIS. Opt. Int. J. Light Electron Opt. 2018, 157, 25–30. [Google Scholar] [CrossRef]
- Xue, L.; Jiang, C.; Chang, H.; Yang, Y.; Qin, W.; Yuan, W. A novel Kalman filter for combining outputs of MEMS gyroscope array. Measurement 2012, 45, 745–754. [Google Scholar] [CrossRef]
- Chang, H.; Xue, L.; Jiang, C.; Kraft, M.; Yuan, W. Combining Numerous Uncorrelated MEMS Gyroscopes for Accuracy Improvement Based on an Optimal Kalman Filter. IEEE Trans. Instrum. Meas. 2012, 61, 3084–3093. [Google Scholar] [CrossRef]
- Shen, Q.; Yuan, W.; Qu, B.; Xie, J.; Chang, H. A Virtual Gyroscope Based-on a Single-Chip Four-Microgyroscoe Array. In Proceedings of the IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Waikiki Beach, HI, USA, 13–16 April 2014; pp. 195–198. [Google Scholar]
- Xue, L.; Wang, X.; Yang, B.; Yuan, W.; Yuan, G. Analysis of Correlation in MEMS Gyroscope Array and its Influence on Accuracy Improvement for the Combined Angular Rate Signal. Micromachines 2018, 9, 22. [Google Scholar] [CrossRef]
- Heera, M.M.; Divya, J.K.; Varma, M.S.; Divya, R.A.; Agrawal, V.K. Minimum Variance Optimal Filter Design for a 3x3 MEMS Gyroscope Cluster Configuration. In Proceedings of the 4th IFAC Conference on Advances in Control and Optimization of Dynamical Systems ACODS, Tiruchirappalli, India, 1–5 February 2016; pp. 639–645. [Google Scholar]
- Wang, J.; Olson, E. High-Performance Inertial Measurements Using a Redundant Array of Inexpensive Gyroscopes (RAIG). In Proceedings of the 2015 IEEE International Conference on Multisensor Fusion and lntegration for Intelligent Systems (MFI), San Diego, CA, USA, 14–16 September 2015; pp. 71–76. [Google Scholar]
- Allan, D.W. Statistics of atomic frequency standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Term | Allan Variance | Slope | Coefficient | Unit | Gyro 1 | Gyro 1 | Gyro 1 |
|---|---|---|---|---|---|---|---|
| Quantization noise | −1 | Q | deg | 0.00821 | 0.00726 | 0.00707 | |
| Angular random walk | −1/2 | N | deg/h1/2 | 0.355 | 0.315 | 0.314 | |
| Zero bias instability | 0 | B | deg/h | 10.318 | 7.790 | 8.533 | |
| Angular rate random walk | 1/2 | P | deg/h3/2 | 52.323 | 120.310 | 61.357 | |
| Rate Ramp | 1 | R | deg/h2 | - | - | - |
| Gyroscope Number | Gyro 1 | Gyro 2 | Gyro 3 |
|---|---|---|---|
| Gyro 1 | 1 | −1.0582 × 10−4 | 1.6087 × 10−3 |
| Gyro 2 | −1.0582 × 10−4 | 1 | 1.3325 × 10−2 |
| Gyro 3 | 1.6087 × 10−3 | 1.3325 × 10−2 | 1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Shi, Z.; Wang, L.; Wang, H. Improved Virtual Gyroscope Technology Based on the ARMA Model. Micromachines 2018, 9, 348. https://doi.org/10.3390/mi9070348
Song J, Shi Z, Wang L, Wang H. Improved Virtual Gyroscope Technology Based on the ARMA Model. Micromachines. 2018; 9(7):348. https://doi.org/10.3390/mi9070348
Chicago/Turabian StyleSong, Jinlong, Zhiyong Shi, Lvhua Wang, and Hailiang Wang. 2018. "Improved Virtual Gyroscope Technology Based on the ARMA Model" Micromachines 9, no. 7: 348. https://doi.org/10.3390/mi9070348
APA StyleSong, J., Shi, Z., Wang, L., & Wang, H. (2018). Improved Virtual Gyroscope Technology Based on the ARMA Model. Micromachines, 9(7), 348. https://doi.org/10.3390/mi9070348