Manipulating Microrobots Using Balanced Magnetic and Buoyancy Forces



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
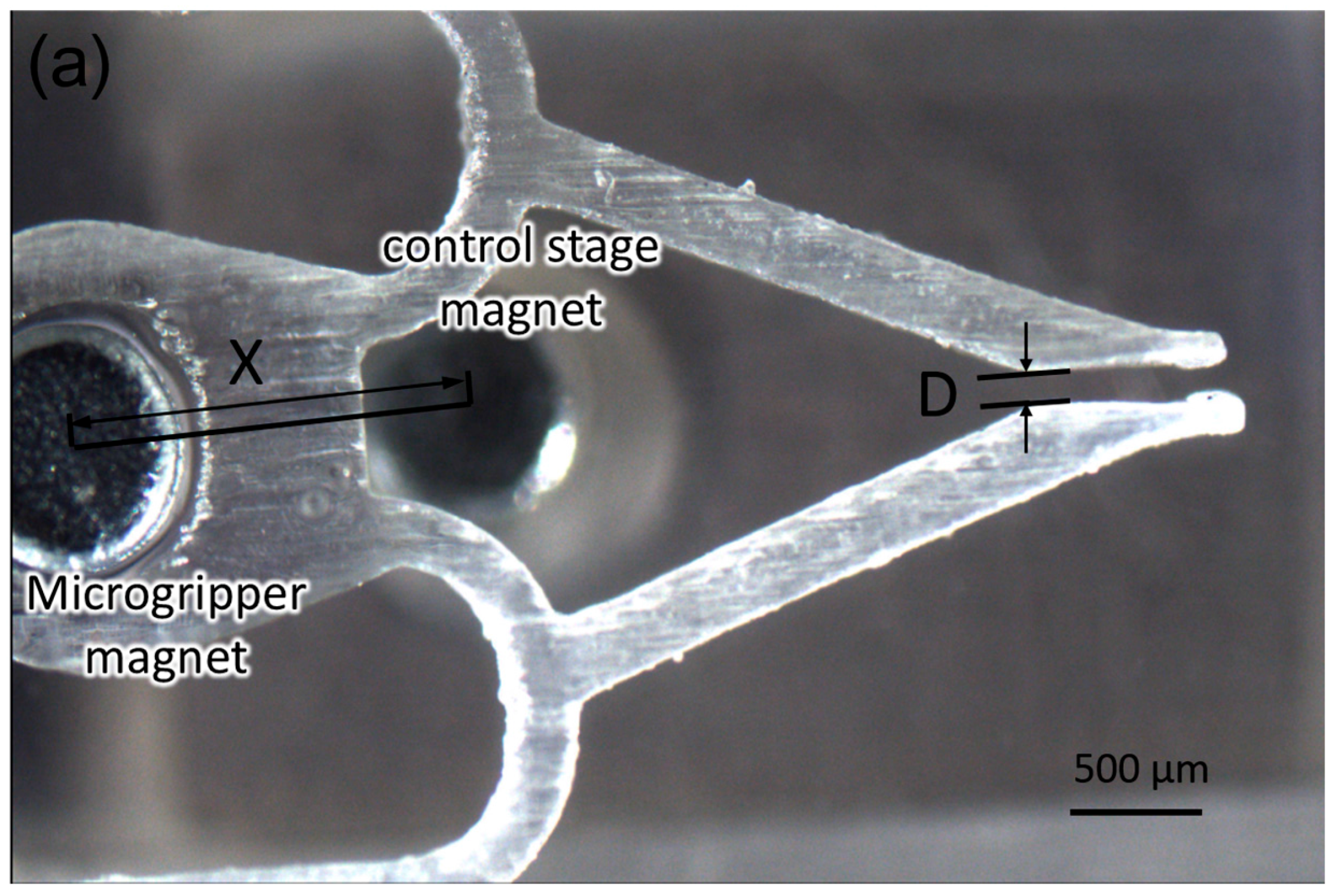
2.1. Microrobot Design
2.2. Microgripper Simulation
2.3. Experimental Setup
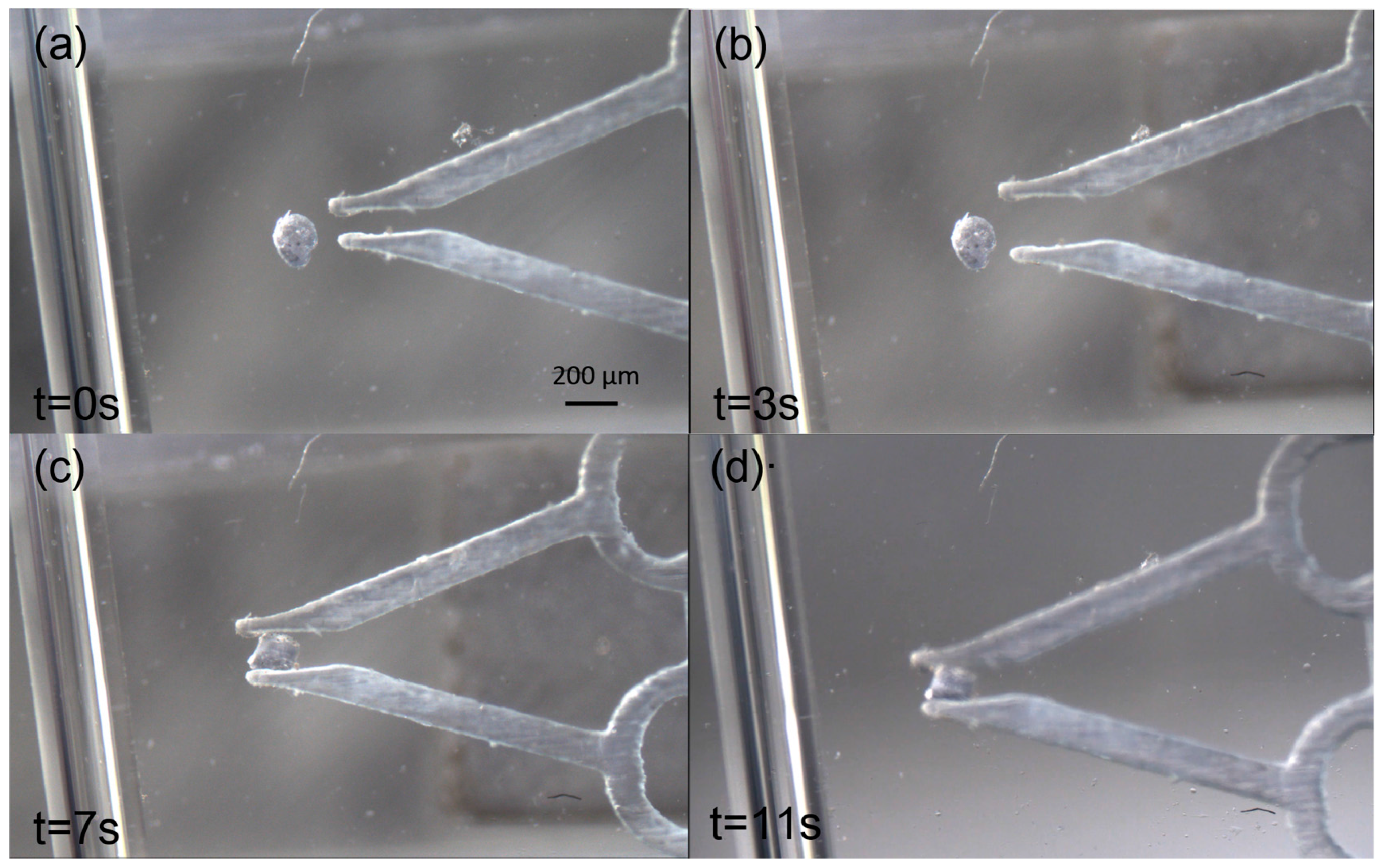
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fujita, H. Recent Progress in Micromachining and Applications to Microactuators. Jpn. J. Appl. Phys. 1994, 33, 7163–7166. [Google Scholar] [CrossRef]
- Bayoudh, S.; Nieminen, T.A.; Heckenberg, N.R. Orientation of biological cells using plane-polarized Gaussian beam optical tweezers 1 Introduction. J. Mod. Opt. 2003, 50, 1581–1590. [Google Scholar] [CrossRef][Green Version]
- Ichikawa, M.; Kubo, K.; Yoshikawa, K.; Kimura, Y. Tilt control in optical tweezers. J. Biomed. Opt. 2008, 13, 010503. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yu, M. Investigation of inclined dual-fiber optical tweezers for 3D manipulation and force sensing. Opt. Express 2009, 17, 13624–13638. [Google Scholar] [CrossRef] [PubMed]
- Liang, Y.-L.; Huang, Y.-P.; Lu, Y.-S.; Hou, M.T.; Yeh, J.A. Cell rotation using optoelectronic tweezers. Biomicrofluidics 2010, 4, 043003. [Google Scholar] [CrossRef] [PubMed]
- Onda, K.; Arai, F. Multi-beam bilateral teleoperation of holographic optical tweezers. Opt. Express 2012, 20, 3633–3641. [Google Scholar] [CrossRef] [PubMed]
- Pohl, H.A. Some effects of nonuniform fields on dielectrics. J. Appl. Phys. 1958, 29, 1182–1188. [Google Scholar] [CrossRef]
- Nishioka, M.; Katsura, S.; Hirano, K.; Mizuno, A. Evaluation of cell characteristics by step-wise orientational/nrotation using optoelectrostatic micromanipulation. IEEE Trans. Ind. Appl. 1997, 33, 1353–1357. [Google Scholar] [CrossRef]
- Park, J.; Jung, S.-H.; Kim, Y.H.; Kim, B.; Lee, S.-K.; Ju, B.; Lee, K. An integrated bio cell processor for single embryo cell manipulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 242–247. [Google Scholar] [CrossRef]
- Kunikata, R.; Takahashi, Y.; Koide, M.; Itayama, T.; Yasukawa, T.; Shiku, H.; Matsue, T. Three dimensional microelectrode array device integrating multi-channel microfluidics to realize manipulation and characterization of enzyme-immobilized polystyrene beads. Sens. Actuators B Chem. 2009, 141, 256–262. [Google Scholar] [CrossRef]
- Gray, D.S.; Tan, J.L.; Voldman, J.; Chen, C.S. Dielectrophoretic registration of living cells to a microelectrode array. Biosens. Bioelectron. 2004, 19, 1765–1774. [Google Scholar] [CrossRef] [PubMed]
- Beyeler, F.; Neild, A.; Oberti, S.; Bell, D.J.; Sun, Y.; Dual, J.; Nelson, B.J. Monolithically fabricated microgripper with integrated force sensor for manipulating microobjects and biological cells aligned in an ultrasonic field. J. Microelectromech. Syst. 2007, 16, 7–15. [Google Scholar] [CrossRef]
- Colinjivadi, K.S.; Lee, J.-B.; Draper, R. Viable cell handling with high aspect ratio polymer chopstick gripper mounted on a nano precision manipulator. Microsyst. Technol. 2008, 14, 1627–1633. [Google Scholar] [CrossRef]
- Jager, E.W.H. Microrobots for Micrometer-Size Objects in Aqueous Media: Potential Tools for Single-Cell Manipulation. Science 2000, 288, 2335–2338. [Google Scholar] [CrossRef] [PubMed]
- Wester, B.A.; Rajaraman, S.; Ross, J.D.; Laplaca, M.C.; Allen, M.G. Development and characterization of a packaged mechanically actuated microtweezer system. Sens. Actuators A Phys. 2011, 167, 502–511. [Google Scholar] [CrossRef]
- Kawahara, T.; Sugita, M.; Hagiwara, M.; Arai, F.; Kawano, H.; Shihira-Ishikawa, I.; Miyawaki, A. On-chip microrobot for investigating the response of aquatic microorganisms to mechanical stimulation. Lab Chip 2013, 13, 1070–1078. [Google Scholar] [CrossRef] [PubMed]
- Ichikawa, A.; Sakuma, S.; Sugita, M.; Shoda, T.; Tamakoshi, T.; Akagi, S.; Arai, F. On-chip enucleation of an oocyte by untethered microrobots. J. Micromech. Microeng. 2014, 24, 095004. [Google Scholar] [CrossRef]
- Ceylan, H.; Giltinan, J.; Kozielski, K.; Sitti, M.; Münster, R.; Mierka, O.; Turek, S.; Leshansky, A.M.; Fischer, P.; Zhang, L.; et al. Mobile microrobots for bioengineering applications. Lab Chip 2017, 17, 1705–1724. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Peyer, K.E.; Nelson, B.J. Artificial bacterial flagella for micromanipulation. Lab Chip 2010, 10, 2203–2215. [Google Scholar] [CrossRef] [PubMed]
- Ger, T.-R.; Huang, H.-T.; Chen, W.-Y.; Lai, M.-F. Magnetically-controllable zigzag structures as cell microgripper. Lab Chip 2013, 13, 2364–2369. [Google Scholar] [CrossRef] [PubMed]
- Chung, S.E.; Dong, X.; Sitti, M. Three-dimensional heterogeneous assembly of coded microgels using an untethered mobile microgripper. Lab Chip 2015, 15, 1667–1676. [Google Scholar] [CrossRef] [PubMed]
- Castillo, J.; Dimaki, M.; Svendsen, W.E. Manipulation of biological samples using micro and nano techniques. Integr. Biol. 2009, 1, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Cugat, O.; Delamare, J.; Reyne, G. Magnetic Micro-Actuators and Systems (MAGMAS). IEEE Trans. Magn. 2003, 39, 3607–3612. [Google Scholar] [CrossRef]
- Inomata, N.; Mizunuma, T.; Yamanishi, Y.; Arai, F. Omnidirectional actuation of magnetically driven microtool for cutting of oocyte in a chip. J. Microelectromech. Syst. 2011, 20, 383–388. [Google Scholar] [CrossRef]
- Feng, L.; Hagiwara, M.; Ichikawa, A.; Arai, F. On-Chip enucleation of bovine oocytes using microrobot-assisted flow-speed control. Micromachines 2013, 4, 272–285. [Google Scholar] [CrossRef]
- Feng, L.; Sun, Y.; Ohsumi, C.; Arai, F. Accurate dispensing system for single oocytes using air ejection. Biomicrofluidics 2013, 7, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Feng, L.; Di, P.; Arai, F. High-precision motion of magnetic microrobot with ultrasonic levitation for 3-D rotation of single oocyte. Int. J. Robot. Res. 2016, 35, 1445–1458. [Google Scholar] [CrossRef]
- Hagiwara, M.; Kawahara, T.; Yamanishi, Y.; Masuda, T.; Feng, L.; Arai, F. On-chip magnetically actuated robot with ultrasonic vibration for single cell manipulations. Lab Chip 2011, 11, 2049–2054. [Google Scholar] [CrossRef] [PubMed]
- Yamanishi, Y.; Feng, L.; Arai, F. On-demand and Size-controlled Production of emulsion droplets by magnetically driven microtool. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; Volume 1, pp. 4094–4099. [Google Scholar]
- Vokoun, D.; Beleggia, M.; Heller, L.; Šittner, P. Magnetostatic interactions and forces between cylindrical permanent magnets. J. Magn. Magn. Mater. 2009, 321, 3758–3763. [Google Scholar] [CrossRef]
- Hagiwara, M.; Kawahara, T.; Yamanishi, Y.; Arai, F. Driving method of microtool by horizontally arranged permanent magnets for single cell manipulation. Appl. Phys. Lett. 2010, 97, 1–4. [Google Scholar] [CrossRef]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, L.; Wu, X.; Jiang, Y.; Zhang, D.; Arai, F. Manipulating Microrobots Using Balanced Magnetic and Buoyancy Forces. Micromachines 2018, 9, 50. https://doi.org/10.3390/mi9020050
Feng L, Wu X, Jiang Y, Zhang D, Arai F. Manipulating Microrobots Using Balanced Magnetic and Buoyancy Forces. Micromachines. 2018; 9(2):50. https://doi.org/10.3390/mi9020050
Chicago/Turabian StyleFeng, Lin, Xiaocong Wu, Yonggang Jiang, Deyuan Zhang, and Fumihito Arai. 2018. "Manipulating Microrobots Using Balanced Magnetic and Buoyancy Forces" Micromachines 9, no. 2: 50. https://doi.org/10.3390/mi9020050
APA StyleFeng, L., Wu, X., Jiang, Y., Zhang, D., & Arai, F. (2018). Manipulating Microrobots Using Balanced Magnetic and Buoyancy Forces. Micromachines, 9(2), 50. https://doi.org/10.3390/mi9020050