Research on a 3-DOF Motion Device Based on the Flexible Mechanism Driven by the Piezoelectric Actuators


Abstract
1. Introduction
2. Overall Design of the System
2.1. Summary
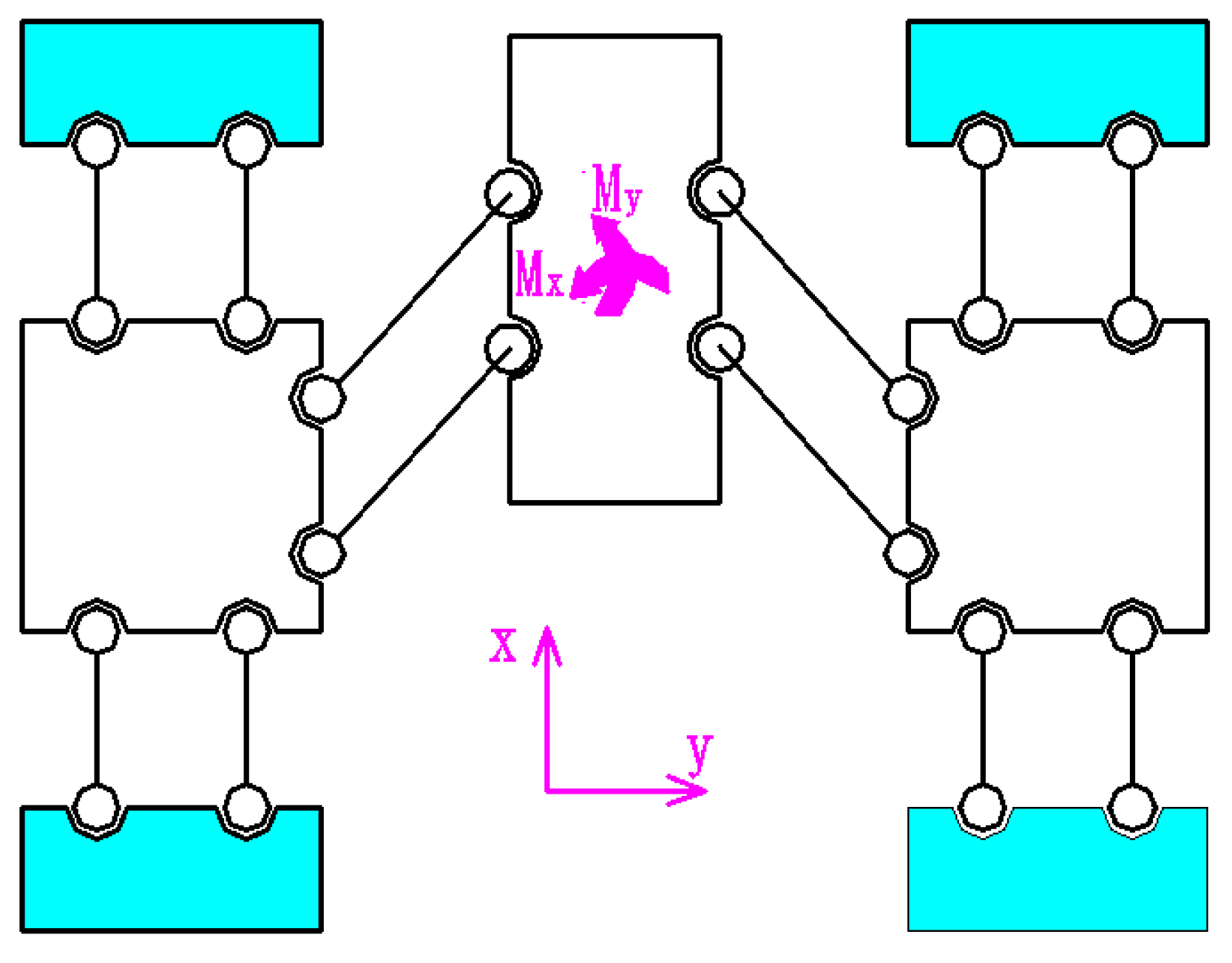
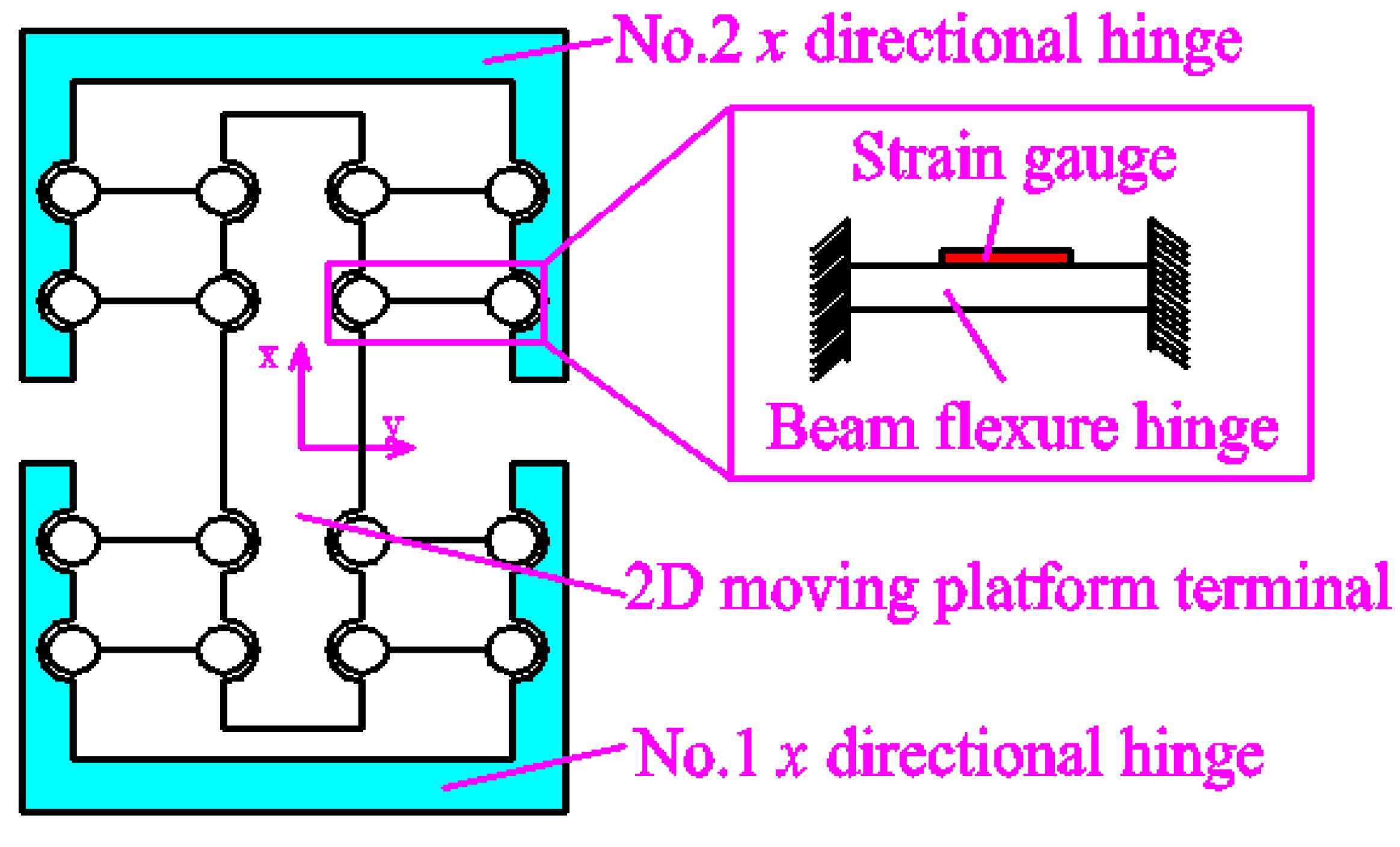
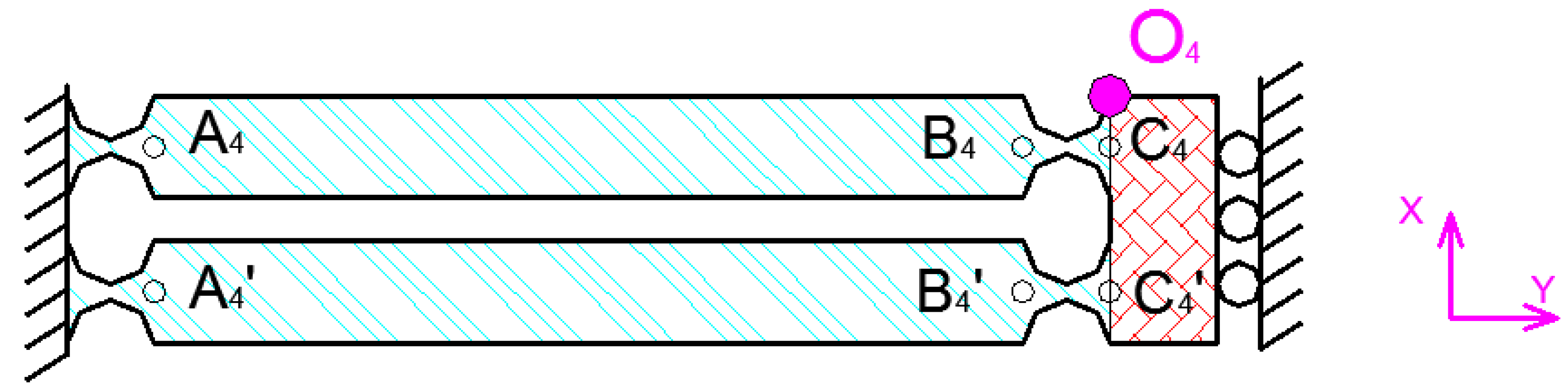
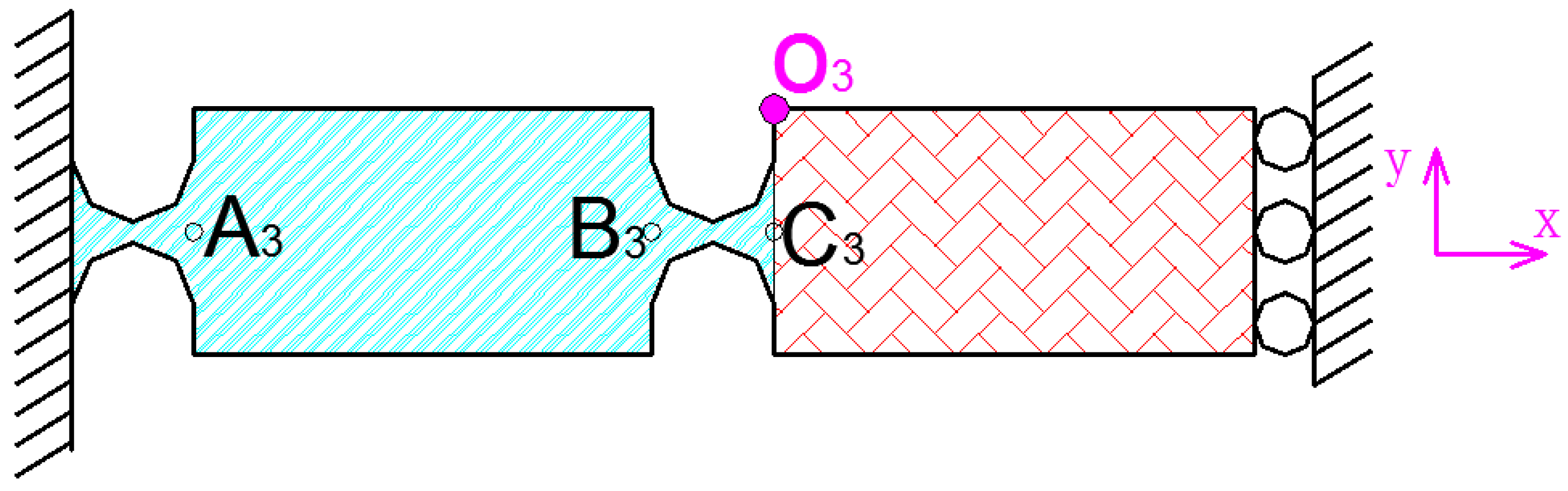
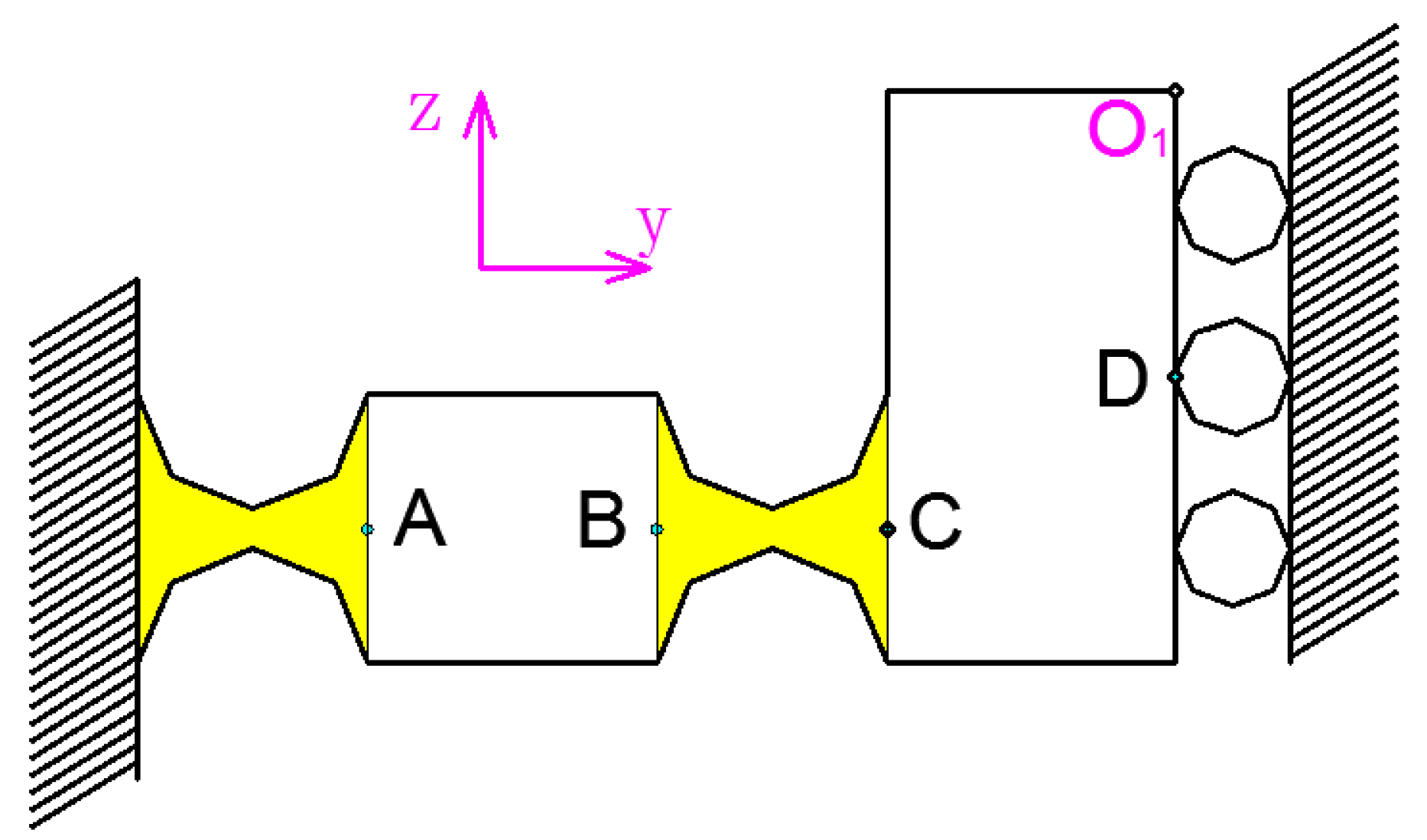
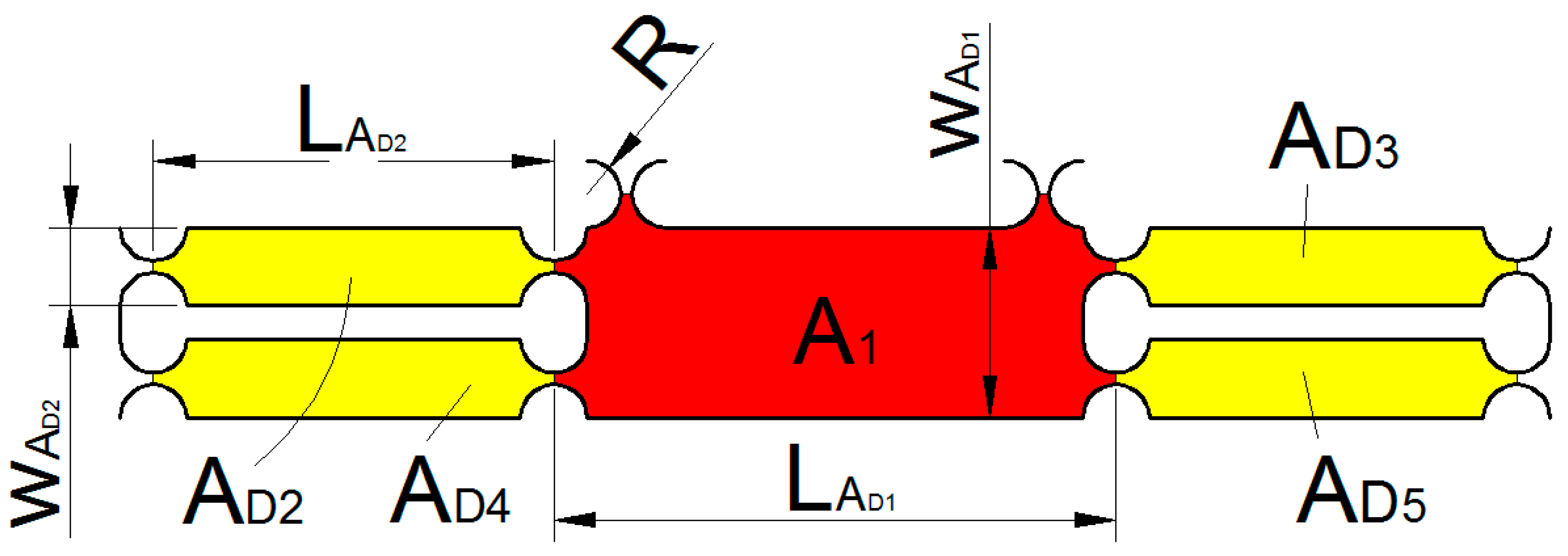
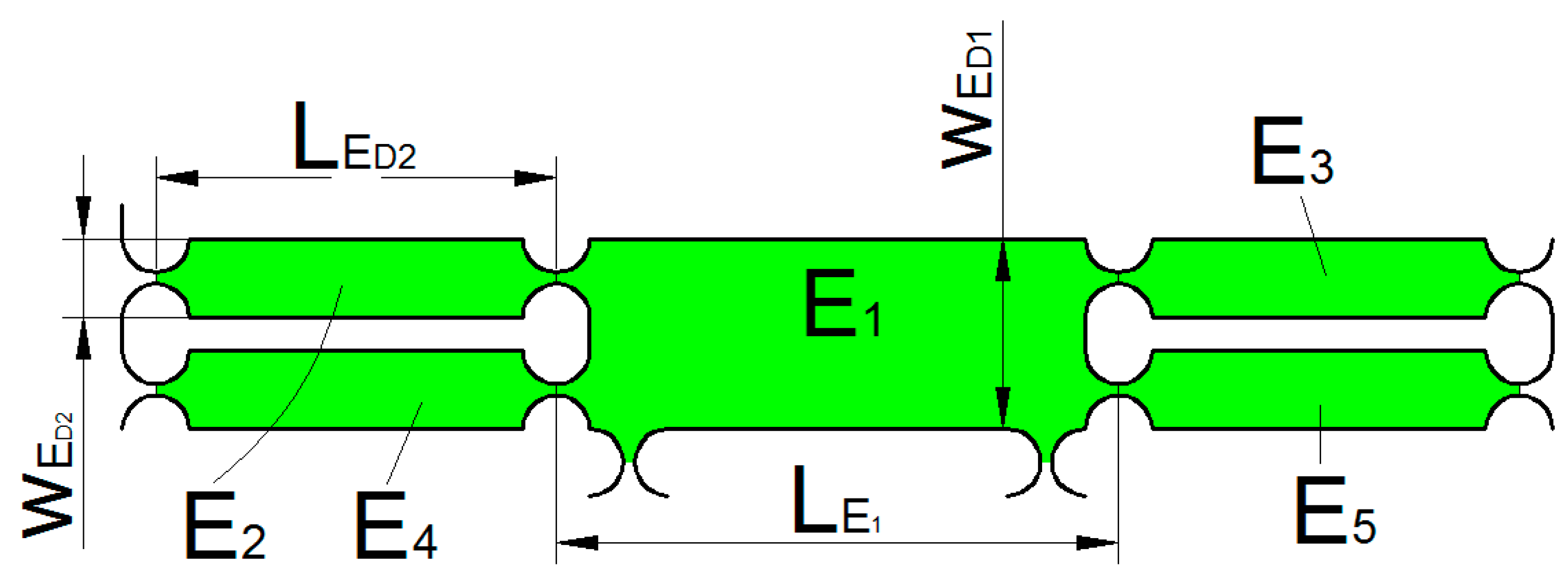
2.2. x and y Output Decoupling Guide Element
3. Analysis of Mechanism Characteristics
3.1. Static Analysis
3.1.1. Calculation of Output Flexibility Using the MCM Method
3.1.2. Finite Element Analysis (FEA)
3.2. Dynamic Analysis
3.2.1. Theoretical Model
3.2.2. Finite Element Analysis (FEA)
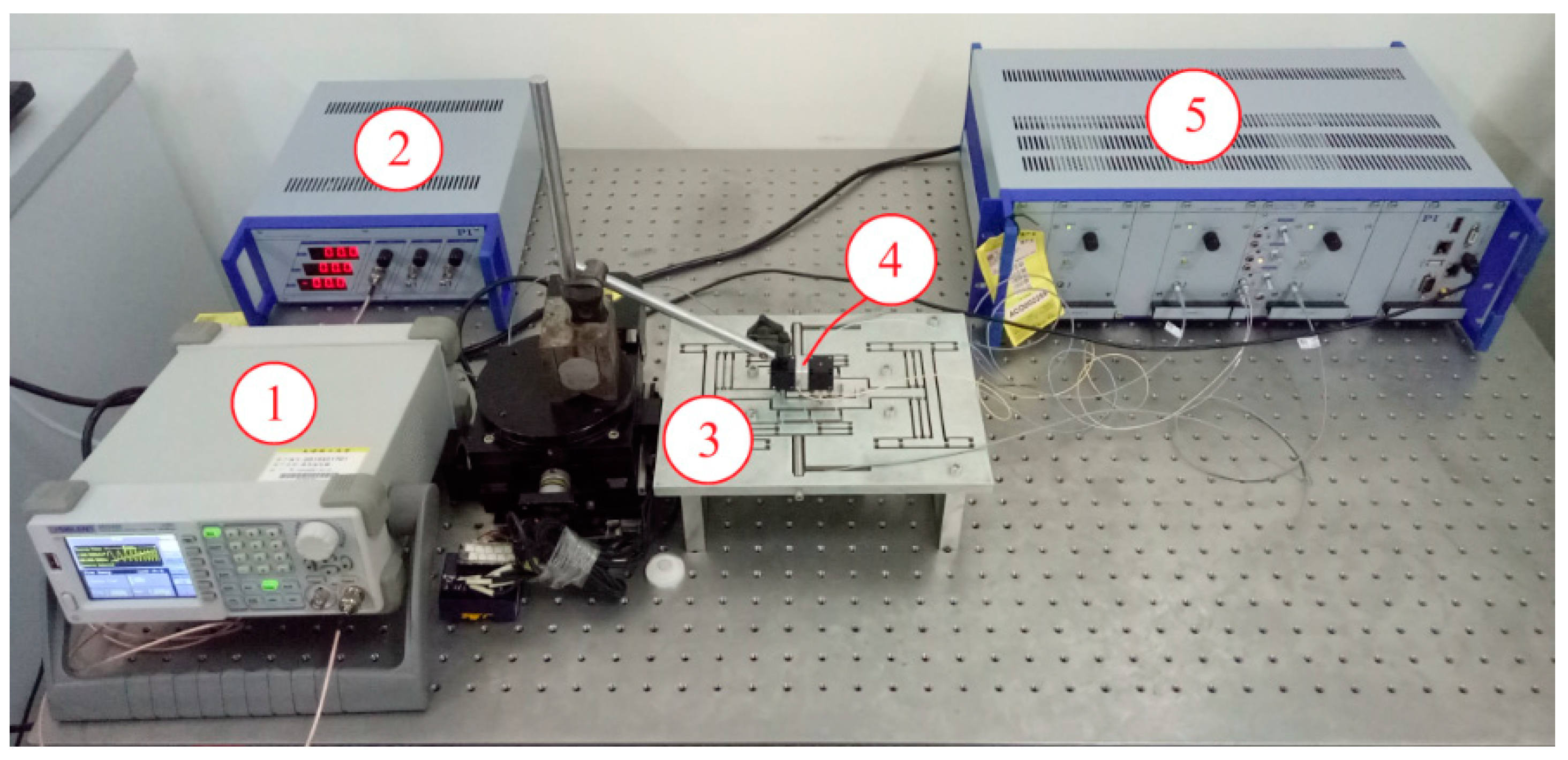
4. Device Performance Test
4.1. Natural Frequency
4.2. Dynamic Performance
4.3. Linear Motion Performance in Each Direction
4.4. 3D Vibration Trajectory
5. Application Test
6. Conclusions
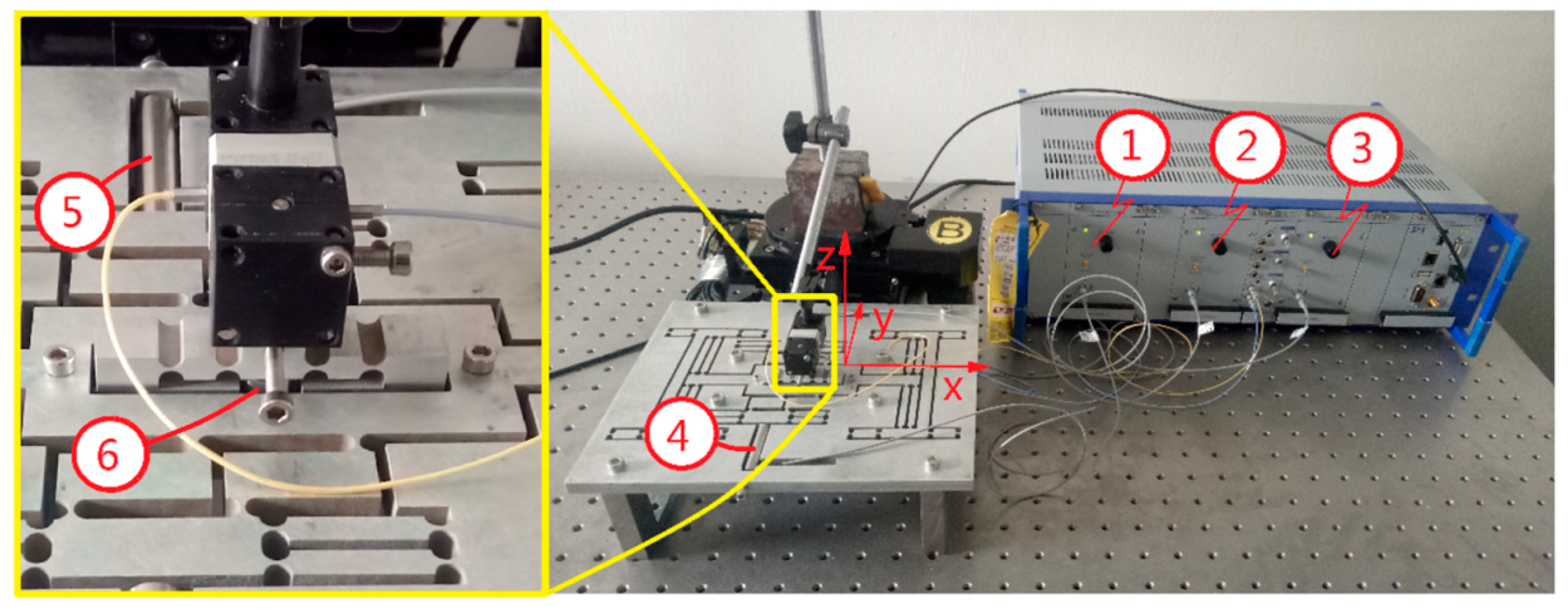
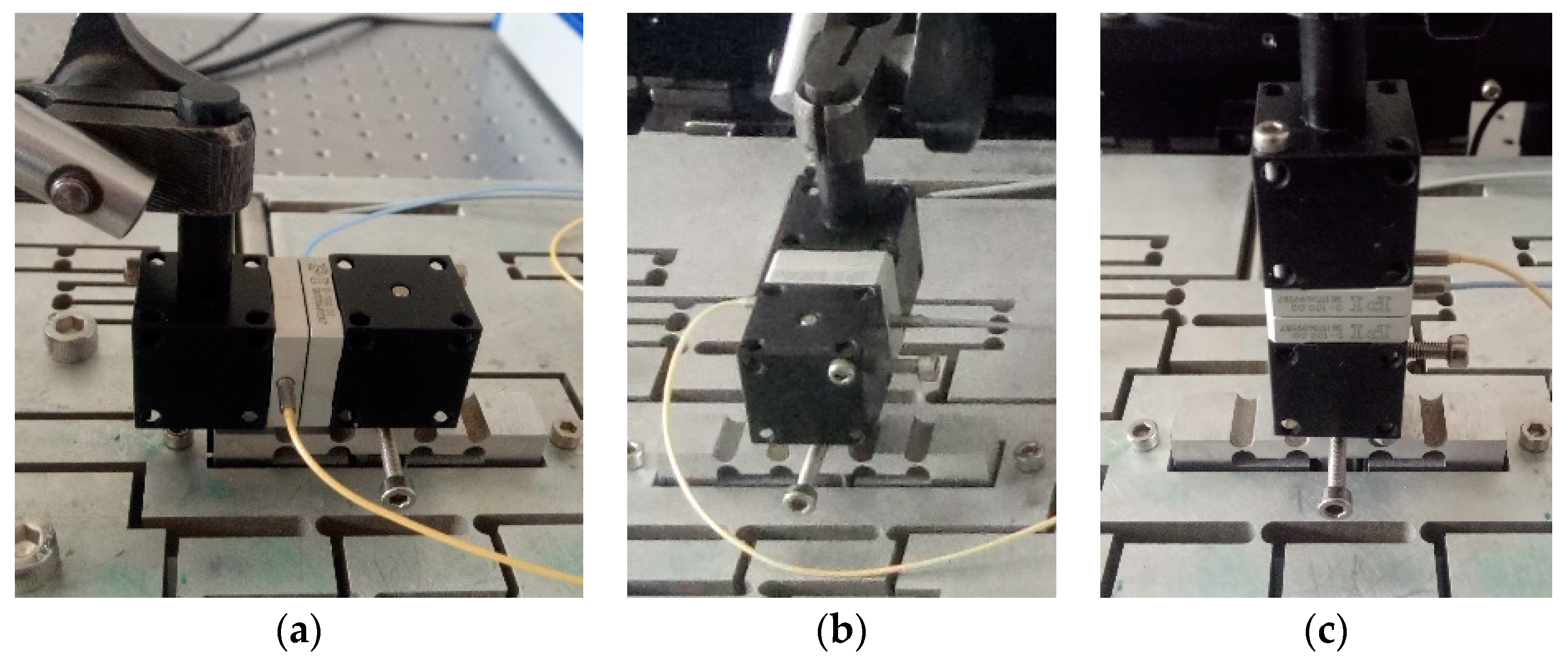
- The device is mainly series connected by a 2D motion platform including the x and y directions, and the independent movement structure with z direction. The 3-DOF device adopts a circular flexure hinge, in which the 2D motion platform consists of three parts: driving element, force-dividing element (composed of four force-dividing blocks), x and y output decoupling guide element. The driving element is designed using the principle of double parallelograms. The function of the force-dividing element is to decompose the force into x and y directions; The x and y output decoupling guide element can improve the output stiffness, and running accuracy, and detect the actual displacement in the x and y directions.
- The statics and dynamics of the 3-DOF motion device were analyzed. Using the MCM method, the output stiffness in the x, y and z directions are 1.137 N/μm, 0.760 N/μm and 0.717 N/μm. Using the FEA method, the output stiffness in the x, y and z directions are 1.178 N/μm, 0.751 N/μm, and 0.659 N/μm. Using energy method, the first natural frequency is 439.59 Hz and the second natural frequency is 690.29 Hz. Using FEA method, the first natural frequency is 474.82 Hz and the second natural frequency is 656.98 Hz. The first natural frequency of the experiment is 414 Hz.
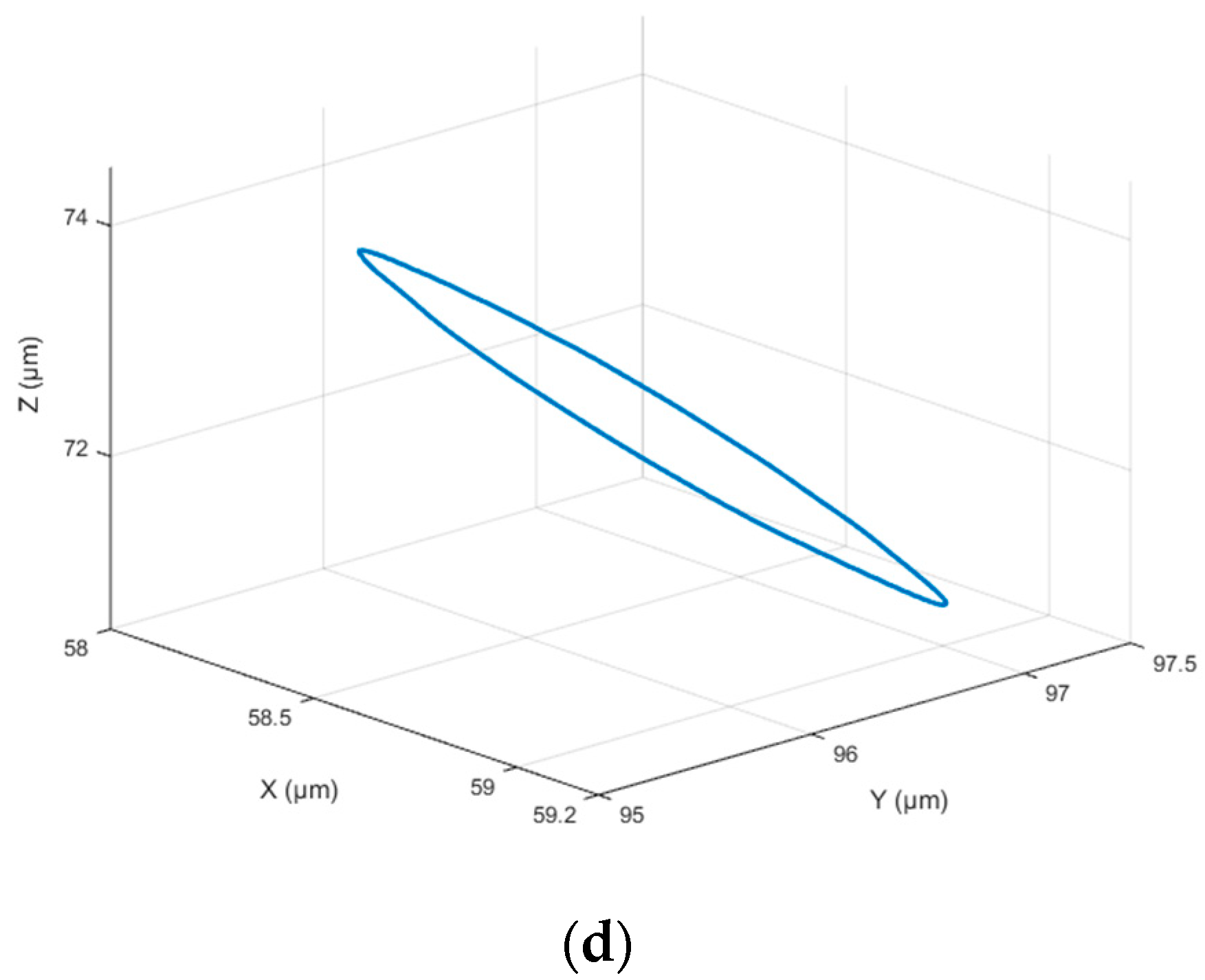
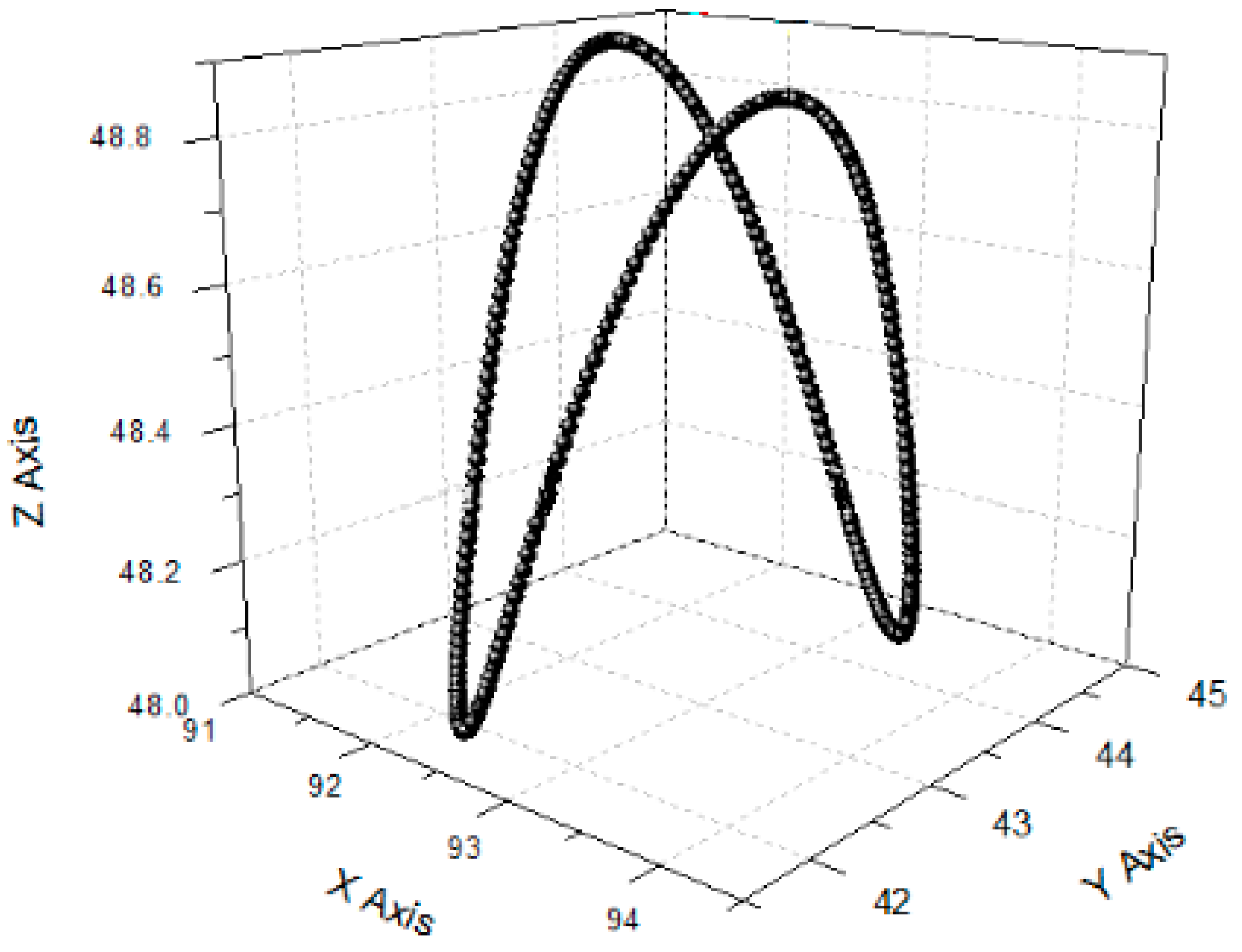
- The device was tested for dynamic performance, linear motion, and vibration trace during no-load. Square wave, triangle wave and sine wave signals were applied in three directions to test dynamic response performance. When the square wave is input, the x-direction return response basically reaches the theoretical operating position at 0.025 s; the y direction and z direction reach 90% of the theoretical operating position at 0.025 s and 0.027 s, respectively. When the triangular wave signal is an input signal, the output signal amplitude fluctuates around the theoretical output signal; when the sine wave signal is an input signal, the output signal is basically the same as the theoretical output signal. When a signal that can only generate unidirectional motion is applied, the maximum linear motion errors in the x, y and z directions are approximately 6.67%, 5.71%, and 3.03%. Different signals were applied to the No. 1, No. 2 and No. 3 piezoelectric actuators to carry out five sets of vibration track test experiments. These results show that the device has excellent dynamic performance and can achieve 3D spatial trajectory.
- A three-dimensional vibration scratch experiment was carried out using a 3D motion device. When the vibration signal is only applied to the 3-DOF motion device, since the polishing tool is perpendicular to the surface of the workpiece in the z direction, the z-direction exhibits a significant periodic force change and coincides with the z-direction output signal cycle. The period and shape of the force curve are similar when the table is feeding or stationary. The workpiece surface scratched presents a pronounced periodic structure. These results proved the 3-DOF motion device has better reliability.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Kim, J.J.; Choi, Y.M.; Ahn, D.; Hwang, B.; Gweon, D.G.; Jeong, J. A millimeter-range flexure-based nano-positioning stage using a self-guided displacement amplification mechanism. Mech. Mach. Theory 2012, 50, 109–120. [Google Scholar] [CrossRef]
- Meng, Q.; Li, Y.; Xu, J. A novel analytical model for flexure-based proportion compliant Mechanisms. Precis. Eng. 2014, 38, 449–457. [Google Scholar] [CrossRef]
- Lee, J.W.; Li, Y.C.; Chen, K.S.; Liu, Y.H. Design and control of a cascaded piezoelectric actuated two-degrees-of-freedom positioning compliant stage. Precis. Eng. 2016, 45, 374–386. [Google Scholar] [CrossRef]
- Xu, Q. A novel compliant micropositioning stage with dual ranges and Resolutions. Sens. Actuators 2014, 205, 6–14. [Google Scholar] [CrossRef]
- Kenton, B.J.; Leang, K.K. Design and control of a three-axis serial-kinematic high-bandwidth nanopositioner. IEEE/ASME Trans. Mechatron. 2012, 17, 356–369. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Modeling and performance evaluation of a flexure-based XY parallel micromanipulator. Mech. Mach. Theory 2009, 44, 2127–2152. [Google Scholar] [CrossRef]
- Polit, S.; Dong, J. Design of high-bandwidth high-precision flexure-based nanopositioning Modules. J. Manuf. Syst. 2009, 28, 71–77. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. A Novel Piezoactuated XY Stage with Parallel, Decoupled and Stacked Flexure Structure for Micro/Nano Positioning. IEEE Trans. Ind. Electron. 2011, 58, 3601–3615. [Google Scholar] [CrossRef]
- Teo, T.J.; Yang, G.; Chen, I.M. A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography: Part I. Modeling and analyses. Precis. Eng. 2014, 38, 861–871. [Google Scholar] [CrossRef]
- Bhagat, U.; Shirinzadeh, B.; Clark, L.; Chea, P.; Qin, Y.; Tian, Y.; Zhang, D. Design and analysis of a novel flexure-based 3-DOF mechanism. Mech. Mach. Theory 2014, 74, 173–187. [Google Scholar] [CrossRef]
- Kim, M.; Lee, D.W.; Lee, S.; Kim, Y.; Jung, Y. Effects of hinge design of horizontal-swing fast tool servo (HFTS) for micro-patterning on a roll. Int. J. Adv. Manuf. Technol. 2018, 95, 233–241. [Google Scholar] [CrossRef]
- Xu, Q.; Li, Y. Analytical modeling, optimization and testing of a compound bridge-type compliant displacement amplifier. Mech. Mach. Theory 2011, 46, 183–200. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, X. A planar 3-DOF nanopositioning platform with large magnification. Precis. Eng. 2016, 46, 221–231. [Google Scholar] [CrossRef]
- Xu, Q. Design, testing and precision control of a novel long-stroke flexure micropositioning system. Mech. Mach. Theory 2013, 70, 209–224. [Google Scholar] [CrossRef]
- Sun, X.; Yang, B. A new methodology for developing flexure-hinged displacement amplifiers with micro-vibration suppression for a giant magnetostrictive micro drive system. Sens. Actuators 2017, 263, 30–43. [Google Scholar] [CrossRef]
- Dao, T.P.; Huang, S.C. Design and multi-objective optimization for a broad self-amplified 2-DOF monolithic mechanism. Sadhana—Acad. Proc. Eng. Sci. 2017, 42, 1527–1542. [Google Scholar] [CrossRef]
- Lin, C.; Shen, Z.; Wu, Z.; Yu, J. Kinematic characteristic analysis of a micro/nano positioning stage based on bridge-type amplifier. Sens. Actuators 2018, 271, 230–242. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Q. Design and testing of a new 3-DOF spatial flexure parallel micropositioning stage. Int. J. Precis. Eng. Manuf. 2018, 19, 109–118. [Google Scholar] [CrossRef]
- Zhu, W.L.; Zhu, Z.; Guo, P.; Ju, B.F. A novel hybrid actuation mechanism based XY nanopositioning stage with totally decoupled kinematics. Mech. Syst. Signal Proc. 2018, 99, 747–759. [Google Scholar] [CrossRef]
- Qi, K.Q.; Ding, Y.L.; Xiang, Y.; Fang, C.; Zhang, Y. A novel 2-DOF compound compliant parallel guiding mechanism. Mech. Mach. Theory 2017, 117, 21–34. [Google Scholar] [CrossRef]
- Pinskier, J.; Shirinzadeh, B.; Clark, L.; Qin, Y. Development of a 4-DOF haptic micromanipulator utilizing a hybrid parallel-serial flexure mechanism. Mechatroncis 2018, 50, 55–68. [Google Scholar] [CrossRef]
- Tang, H.; Li, H.; To, S.; Yu, K.M.; He, Y.; Gao, J.; Chen, X.; Li, J. Design and control of a new 3-PUU fast tool servo for complex microstructure machining. Int. J. Adv. Manuf. Technol. 2018, 94, 3503–3517. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhou, X.; Liu, Z.; Wang, R.; Zhu, L. Development of a piezoelectrically actuated two degree of freedom fast tool servo with decoupled motons for micro/nanomachining. Precis. Eng. 2014, 38, 809–820. [Google Scholar] [CrossRef]
- Zhou, X.; Zuo, C.; Liu, Q.; Wang, R.; Lin, J. Development of a double-frequency elliptical vibration cutting apparatus for freeform surface diamond machining. Int. J. Adv. Manuf. Technol. 2016, 87, 2099–2111. [Google Scholar] [CrossRef]
- Qu, J.; Chen, W.; Zhang, J.; Chen, W. A piezo-driven 2-DOF compliant micropositioning stage with remote center of motion. Sens. Actuators 2016, 239, 114–126. [Google Scholar] [CrossRef]
- Lin, J.; Han, J.; Lu, M.; Zhou, J.; Gu, Y.; Jing, X.; Feng, D. Design and performance testing of a novel three-dimensional elliptical vibration turning device. Micromachines 2017, 8, 305. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, R.; Liu, Q.; Zhu, Z. Development of a 2-degree-of-freedom decoupled flexural mechanism for micro/nanomachining. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2014, 229, 1900–1911. [Google Scholar] [CrossRef]
- Guo, Z.; Tian, Y.; Liu, X.; Shirinzadeh, B.; Wang, F.; Zhang, D. An inverse Prandtl-Ishlinskii model based decoupling control methodology for a 3-DOF flexure-based mechanism. Sens. Actuators 2015, 230, 52–62. [Google Scholar] [CrossRef]
- Guo, Z.; Tian, Y.; Liu, C.; Wang, F.; Liu, X.; Shirinzadeh, B.; Zhang, D. Design and control methodology of a 3-DOF flexure-based mechanism for micro/nano-positioning. Robot. Comput.-Integr. Manuf. 2015, 32, 93–105. [Google Scholar] [CrossRef]
- Cai, K.; Tian, Y.; Wang, F.; Zhang, D.; Shirinzadeh, B. Development of a piezo-driven 3-DOF stage with T-shape flexible hinge mechanism. Robot. Comput.-Integr. Manuf. 2016, 37, 125–138. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Zhao, H. A compact 2-DOF piezoelectric-driven platform based on “z-shaped” flexure hinges. Micromachines 2017, 8, 245. [Google Scholar] [CrossRef]
- Cai, K.; Tian, Y.; Wang, F.; Zhang, D.; Liu, X.; Shirinzadeh, B. Design and control of a 6-degree-of-freedom precision positioning system. Robot. Comput.-Integr. Manuf. 2017, 44, 77–96. [Google Scholar] [CrossRef]
- Chen, W.; Chen, S.; Qu, J.; Chen, W. A large-range compliant remote center of motion stage with input/output decoupling. Precis. Eng. 2018, 51, 468–480. [Google Scholar] [CrossRef]
- Zhu, W.L.; Zhu, Z.; He, Y.; Ehmann, K.F.; Ju, B.F.; Li, S. Development of a novel 2-D vibration-assisted compliant cutting system for surface texturing. IEEE/ASME Trans. Mechatron. 2017, 22, 1796–1806. [Google Scholar] [CrossRef]
















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | FX (N) | δX (μm) | Error (%) | FY (N) | δY (μm) | Error (%) | FZ (N) | δZ (μm) | Error (%) |
|---|---|---|---|---|---|---|---|---|---|
| FEA | 100 | 84.87 | 3.612 | 100 | 133.17 | 1.156 | 100 | 151.86 | 8.126 |
| MCM | 100 | 87.94 | 100 | 131.63 | 100 | 139.52 |
| Project | Maximum Displacement | ||
|---|---|---|---|
| x Direction (μm) | y Direction (μm) | z Direction (μm) | |
| x direction input signal | 1.2 | 0.08 | 0.03 |
| y direction input signal | 0.08 | 1.4 | 0.05 |
| z direction input signal | 0.01 | 0.01 | 1.65 |
| Project | Tool | Sinusoidal Signal Direction | Low Voltage (V) | High Voltage (V) | Cycle (s) | Frequency Difference between x and y (s) |
|---|---|---|---|---|---|---|
| Experiment No. 1 | Green rubber tool | x | 0 | 8 | 0.006 | 0.001 |
| y | 0 | 8 | 0.006 | |||
| z | 0 | 8 | 0.3 | |||
| Experiment No. 2 | Diamond tool | x | 0 | 8 | 0.006 | 0.001 |
| y | 0 | 8 | 0.006 | |||
| z | 0 | 8 | 1.2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, B.; Wang, G.; Li, B.; Zhou, H.; Hu, Y. Research on a 3-DOF Motion Device Based on the Flexible Mechanism Driven by the Piezoelectric Actuators. Micromachines 2018, 9, 578. https://doi.org/10.3390/mi9110578
Lv B, Wang G, Li B, Zhou H, Hu Y. Research on a 3-DOF Motion Device Based on the Flexible Mechanism Driven by the Piezoelectric Actuators. Micromachines. 2018; 9(11):578. https://doi.org/10.3390/mi9110578
Chicago/Turabian StyleLv, Bingrui, Guilian Wang, Bin Li, Haibo Zhou, and Yahui Hu. 2018. "Research on a 3-DOF Motion Device Based on the Flexible Mechanism Driven by the Piezoelectric Actuators" Micromachines 9, no. 11: 578. https://doi.org/10.3390/mi9110578
APA StyleLv, B., Wang, G., Li, B., Zhou, H., & Hu, Y. (2018). Research on a 3-DOF Motion Device Based on the Flexible Mechanism Driven by the Piezoelectric Actuators. Micromachines, 9(11), 578. https://doi.org/10.3390/mi9110578