A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip




Abstract
1. Introduction
2. System Architecture of the SOI MEMS Resonator and CMOS Sustaining Amplifier
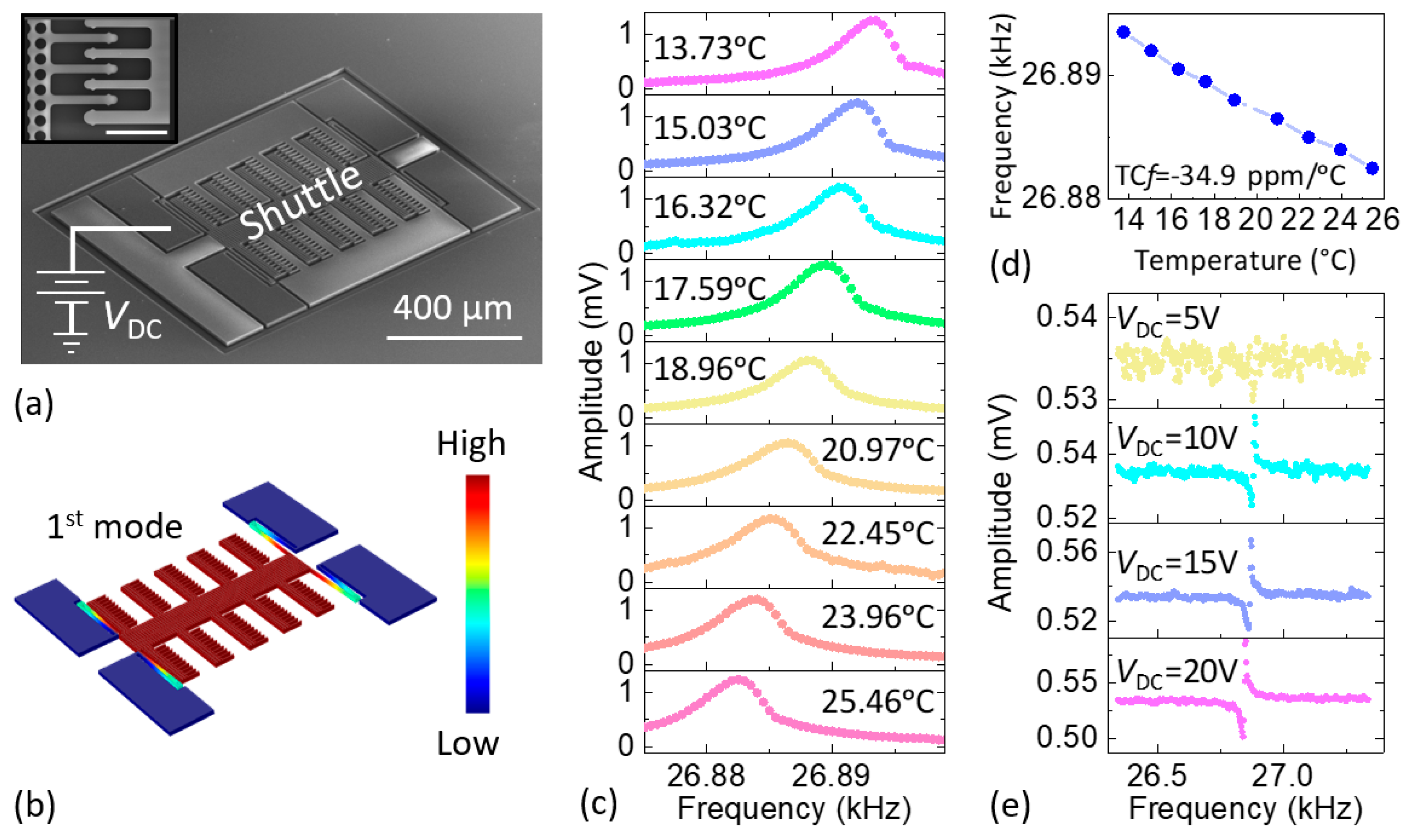
2.1. Overview of the SOI MEMS Resonator
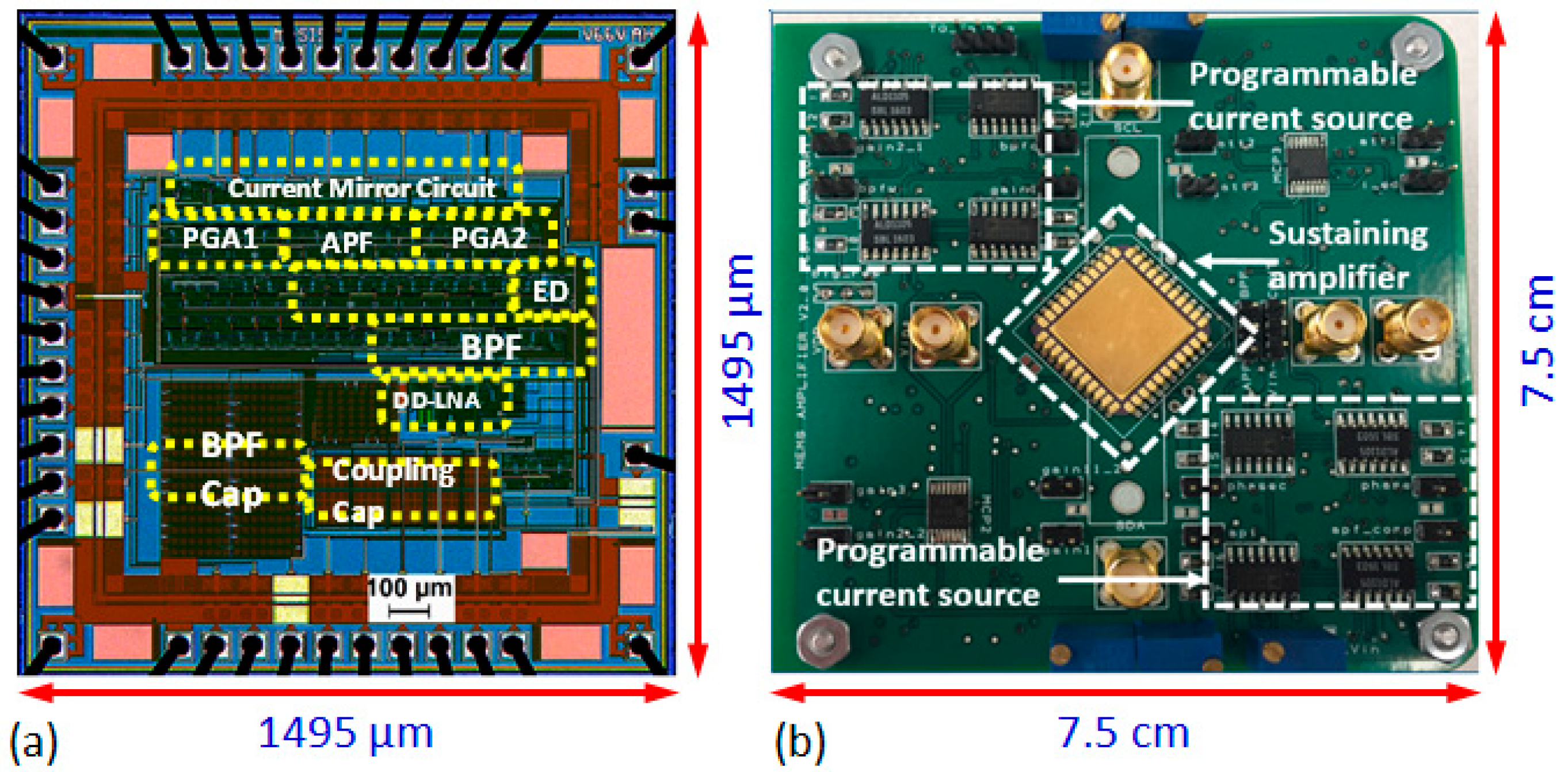
2.2. Overview of the Programmable Single-Chip CMOS Sustaining Amplifier
3. Oscillator Referred to the Single-Crystal SOI MEMS Resonator
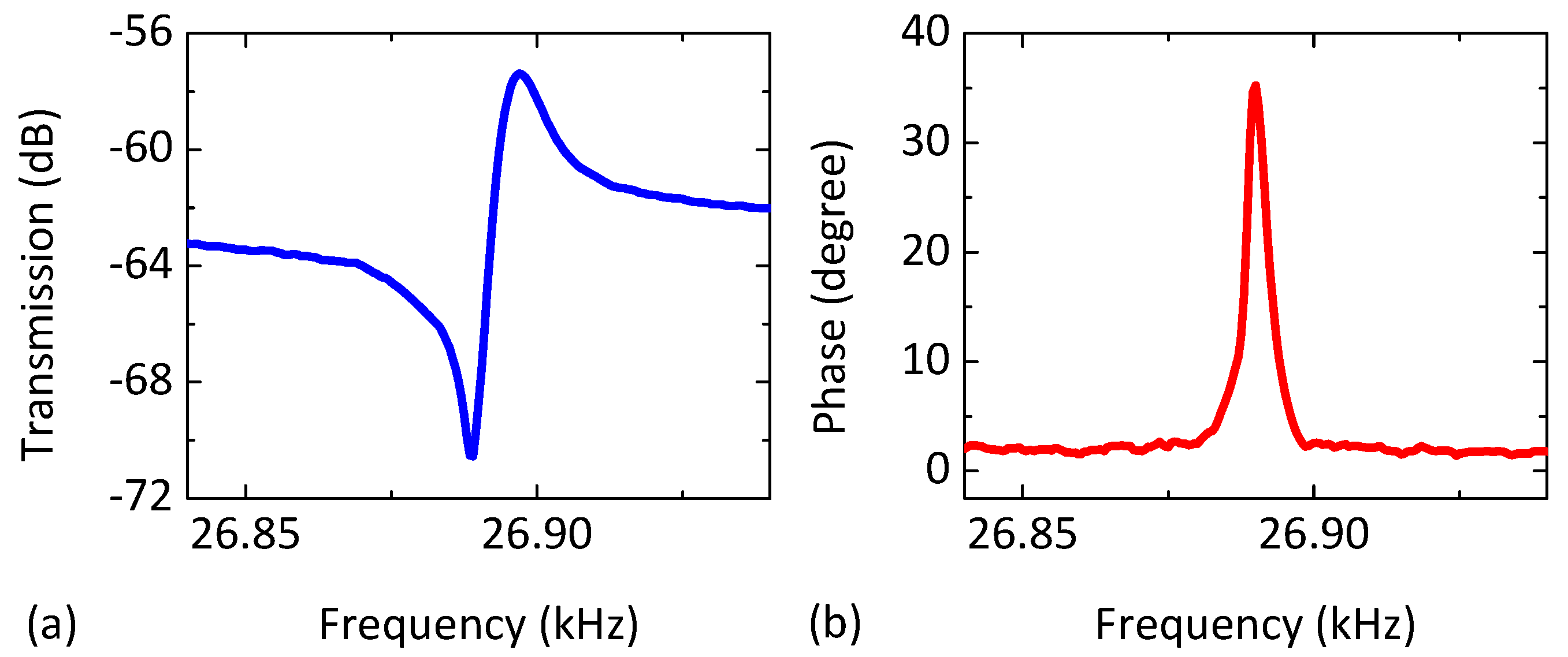
3.1. Oscillator System
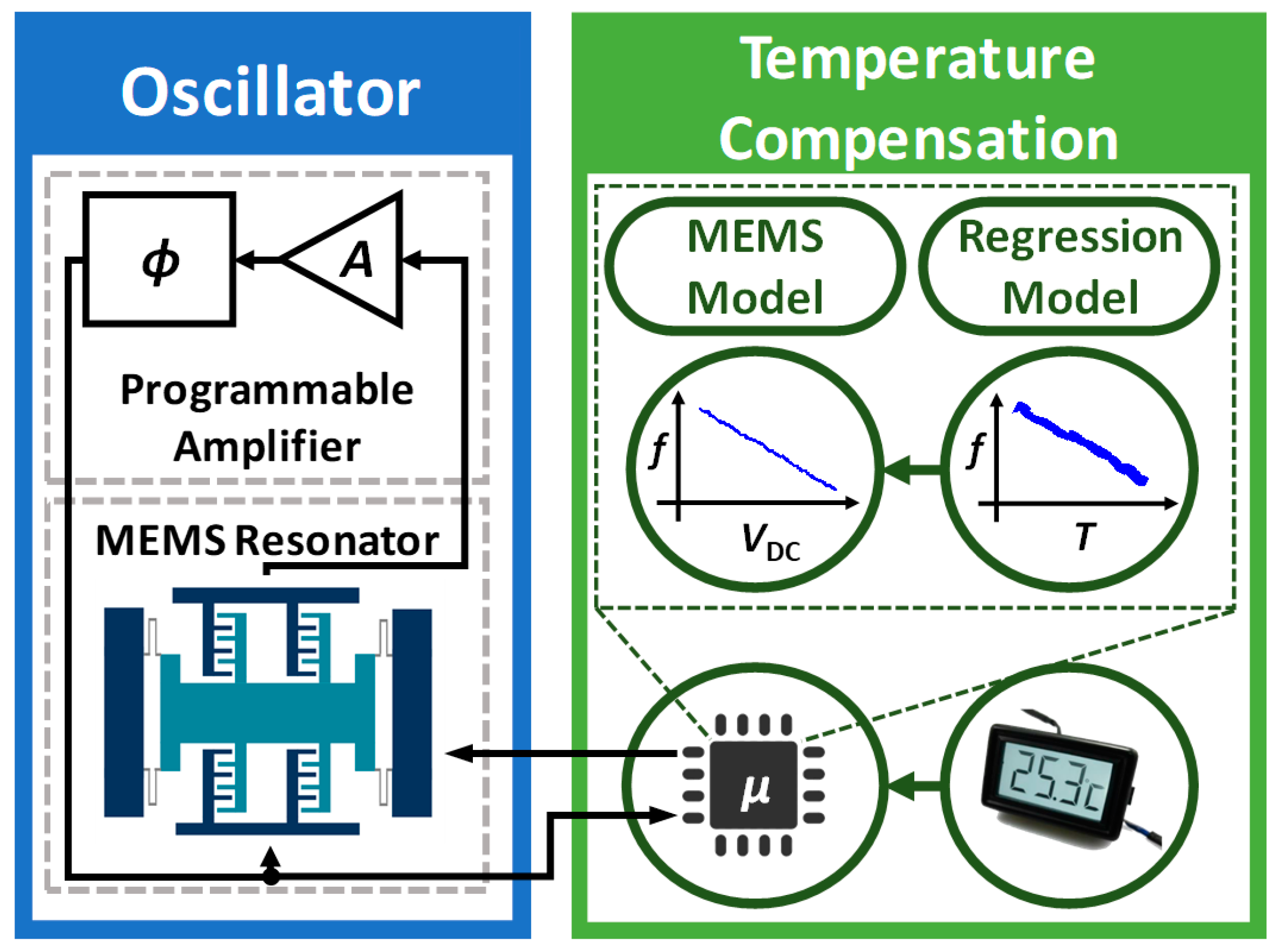
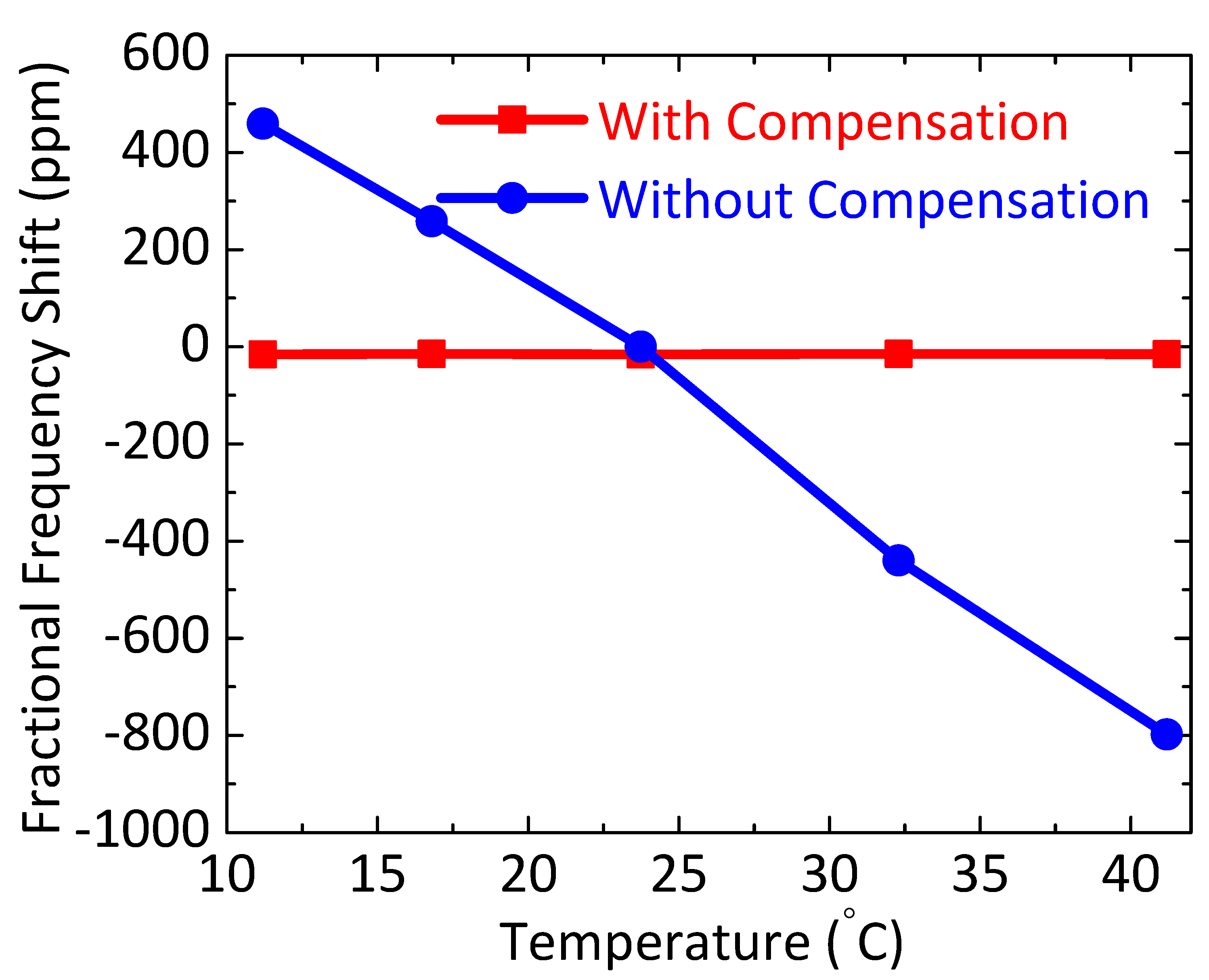
3.2. Temperature Compensation of the MEMS-Referenced Oscillator
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vig, J.R. Temperature-insensitive dual-mode resonant sensors—a review. IEEE Sens. J. 2001, 1, 62–68. [Google Scholar] [CrossRef]
- Nguyen, C.T.-C. MEMS technology for timing and frequency control. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 251–270. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, C.T.-C.; Howe, R.T. An integrated CMOS micromechanical resonator high-Q oscillator. IEEE J. Solid State Circuits 1999, 34, 440–455. [Google Scholar] [CrossRef]
- Thakar, V.; Rais-Zadeh, M. Temperature-compensated piezoelectrically actuated Lame mode resonators. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2014), San Francisco, CA, USA, 26–30 January 2014; pp. 214–217. [Google Scholar]
- Lee, H.; Partridge, A.; Assaderaghi, F. Low jitter and temperature stable MEMS oscillators. In Proceedings of the IEEE International Frequency Control Symposium (IFCS), Baltimore, MD, USA, 21–24 May 2012; pp. 266–270. [Google Scholar]
- Clark, J.R.; Nguyen, C.T.-C. Mechanically temperature-compensated flexural-mode micromechanical resonators. In Proceedings of the International Electron Devices Meeting, San Francisco, CA, USA, 10–13 December 2000; pp. 399–402. [Google Scholar]
- Hsu, W.-T.; Nguyen, C.T.-C. Stiffness-compensated temperature-insensitive micromechanical resonators. In Proceedings of the International Conference on Micro Electro Mechanical Systems (MEMS 2002), Las Vegas, NV, USA, 20–24 January 2002; pp. 731–734. [Google Scholar]
- Sundaresan, K.; Allen, P.E.; Ayazi, F. Process and temperature compensation in a 7-MHz CMOS clock oscillator. IEEE J. Solid State Circuits 2006, 41, 433–442. [Google Scholar] [CrossRef]
- Salvia, J.C.; Melamud, R.; Chandorkar, S.A.; Lord, S.F.; Kenny, T.W. Real-time temperature compensation of mems oscillators using an integrated micro-oven and a phase-locked loop. J. Microelectromech. Syst. 2010, 19, 192–201. [Google Scholar] [CrossRef]
- Samarao, A.K.; Ayazi, F. Temperature compensation of silicon resonators via degenerate doping. IEEE Trans. Electron. Devices 2012, 59, 87–93. [Google Scholar] [CrossRef]
- Rais-Zadeh, M.; Thakar, V.A.; Wu, Z.; Peczalski, A. Temperature compensated silicon resonators for space applications. In Proceedings of the Reliability, Packaging, Testing, and Characterization of MOEMS/MEMS and Nanodevices XII, San Francisco, CA, USA, 9 March 2013; SPIE: Bellingham, WA, USA, 2013; Volume 8614. [Google Scholar]
- Melamud, R.; Kim, B.; Chandorkar, S.A.; Hopcroft, M.A.; Agarwal, M.; Jha, C.M.; Kenny, T.W. Temperature-compensated high-stability silicon resonators. Appl. Phys. Lett. 2007, 90, 244107. [Google Scholar] [CrossRef]
- Thakar, V.A.; Wu, Z.; Figueroa, C.; Rais-Zadeh, M. A temperature-stable clock using multiple temperature-compensated micro-resonators. In Proceedings of the IEEE International Frequency Control Symposium (IFCS), Taipei, Taiwan, 19–22 May 2014; pp. 1–4. [Google Scholar]
- Nguyen, C.T.-C. Micromechanical resonators for oscillators and filters. In Proceedings of the International Ultrasonics Symposium, Seattle, WA, USA, 7–10 November 1995; pp. 489–499. [Google Scholar]
- Serrano, D.E.; Tabrizian, R.; Ayazi, F. Tunable piezoelectric MEMS resonators for real-time clock. In Proceedings of the IEEE International Frequency Control Symposium and the European Frequency and Time Forum (IFCS/EFTF), San Francisco, CA, USA, 2–5 May 2011; pp. 1–4. [Google Scholar]
- Nguyen, C.T.-C. Frequency-selective MEMS for miniaturized low-power communication devices. IEEE Trans. Microw. Theory Tech. 1999, 47, 1486–1503. [Google Scholar] [CrossRef]
- Perrott, M.H.; Salvia, J.C.; Lee, F.S.; Partridge, A.; Mukherjee, S.; Arft, C.; Jintae, K.; Arumugam, N.; Gupta, P.; Tabatabaei, S.; et al. A temperature-to-digital converter for a MEMS-based programmable oscillator with <±0.5-ppm frequency stability and <1-ps integrated jitter. IEEE J. Solid State Circuits 2013, 48, 276–291. [Google Scholar] [CrossRef]
- Villanueva, L.G.; Kenig, E.; Karabalin, R.B.; Matheny, M.H.; Lifshitz, R.; Cross, M.C.; Roukes, M.L. Surpassing fundamental limits of oscillators using nonlinear resonators. Phys. Rev. Lett. 2013, 110, 177208. [Google Scholar] [CrossRef] [PubMed]
- Villanueva, L.G.; Karabalin, R.B.; Matheny, M.H.; Kenig, E.; Cross, M.C.; Roukes, M.L. A nanoscale parametric feedback oscillator. Nano Lett. 2011, 11, 5054–5059. [Google Scholar] [CrossRef] [PubMed]
- Islam, M.S.; Lee, J.; Wei, R.; Feng, P.X.-L.; Mandal, S.M. Programmable & reconfigurable sustaining amplifiers for MEMS/NEMS referenced multimode oscillators. In Proceedings of the Techical Digest of the 18th Solid-State Sensors, Open Poster WOP-12, Actuators & Microsystems Workshop (Hilton Head 2018), Hilton Head Island, SC, USA, 3–7 June 2018. [Google Scholar]
- Lee, J.; Kaul, A.B.; Feng, P.X.-L. Carbon nanofiber high frequency nanomechanical resonators. Nanoscale 2017, 9, 11864–11870. [Google Scholar] [CrossRef] [PubMed]
- McCandless, J.P.; Lee, J.; Kuo, H.I.; Pashaei, V.; Mehregany, M.; Zorman, C.A.; Feng, P.X.-L. Electrical and optical transduction of single-crystal 3C-SiC comb-drive resonators in SiC-on-Insulator (SiCOI) Technology. In Proceedings of the Techical Digest of the 17th Solid-State Sensors, Actuators & Microsystems Workshop (Hilton Head 2016), Hilton Head Island, SC, USA, 5–9 June 2016; pp. 9–12. [Google Scholar]
- Islam, M.S.; Singh, S.K.; Mandal, S. A programmable sustaining amplifier for reconfigurable MEMS-referenced oscillators. In Proceedings of the IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 41–44. [Google Scholar]
- Sarpeshkar, R.; Lyon, R.F.; Mead, C.A. A low-power wide-linear-range transconductance amplifier. Analog Integr. Circuits Signal Process. 1997, 13, 123–151. [Google Scholar] [CrossRef]
- Feng, X.-L.; White, C.J.; Hajimiri, A.; Roukes, M.L. A self-sustaining ultrahigh-frequency nanoelectromechanical oscillator. Nat. Nanotechnol. 2008, 3, 342–346. [Google Scholar] [CrossRef] [PubMed]
- Allan, D.W. Time and frequency (time-domain) characterization, estimation, and prediction of precision clocks and oscillators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1987, 34, 647–654. [Google Scholar] [CrossRef] [PubMed]
- Antonio, D.; Zanette, D.H.; López, D. Frequency stabilization in nonlinear micromechanical oscillators. Nat. Commun. 2012, 3, 806. [Google Scholar] [CrossRef] [PubMed]
- Young, D.J.; Pehlivanoǧlu, I.E.; Zorman, C.A. Silicon carbide MEMS-resonator-based oscillator. J. Micromech. Microeng. 2009, 19, 115027. [Google Scholar] [CrossRef]
- Zaliasl, S.; Salvia, J.C.; Hill, G.C.; Chen, L.W.; Joo, K.; Palwai, R.; Arumugam, N.; Phadke, M.; Mukherjee, S.; Lee, H.C.; et al. A 3 ppm 1.5 × 0.8 mm2 1.0 μA 32.768 kHz MEMS-based oscillator. IEEE J. Solid State Circuits 2015, 50, 291–302. [Google Scholar] [CrossRef]
- Zhang, Y.; Moser, J.; Güttinger, J.; Bachtold, A.; Dykman, M.I. Interplay of driving and frequency noise in the spectra of vibrational systems. Phys. Rev. Lett. 2014, 113, 255502. [Google Scholar] [CrossRef] [PubMed]
- Steele, G.A.; Hüttel, A.K.; Witkamp, B.; Poot, M.; Meerwaldt, H.B.; Kouwenhoven, L.P.; van der Zant, H.S.J. Strong coupling between single-electron tunneling and nanomechanical motion. Science 2009, 325, 1103–1107. [Google Scholar] [CrossRef] [PubMed]
- Miao, T.; Yeom, S.; Wang, P.; Standley, B.; Bockrath, M. Graphene nanoelectromechanical systems as stochastic-frequency oscillators. Nano Lett. 2014, 14, 2982–2987. [Google Scholar] [CrossRef] [PubMed]
- Sansa, M.; Sage, E.; Bullard, E.C.; Gély, M.; Alava, T.; Colinet, E.; Naik, A.K.; Villanueva, L.G.; Duraffourg, L.; Roukes, M.L.; et al. Frequency fluctuations in silicon nanoresonators. Nat. Nanotechnol. 2016, 11, 552–558. [Google Scholar] [CrossRef] [PubMed]
- Cheng, C.L.; Chang, F.R.; Tu, K.Y. Highly accurate real-time GPS carrier phase-disciplined oscillator. IEEE Trans. Instrum. Meas. 2005, 54, 819–824. [Google Scholar] [CrossRef]
- Lombardi, M.A. The use of GPS disciplined oscillators as primary frequency standards for calibration and metrology laboratories. J. Meas. Sci. 2008, 3, 56–65. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chip Components | Performance |
|---|---|
| Low-Noise Amplifier (LNA) (for IB = 2.5 µA) | Gain: 12 dB; Bandwidth: ~1 MHz Thermal Noise PSD: 13 nV/Hz1/2 1/f Corner Frequency: <10 kHz |
| Band-Pass Filter (BPF) | Center Frequency (f0): 2–90 kHz; Q: 1–8 Dynamic Range (DR): 60.7 dB (24 kHz, Q = 2) Linear Range: 500 mV (THD < 5%, 24 kHz, Q = 2) |
| All-Pass Filter (APF) | Phase Control: 0–360° Phase Control Sensitivity: ~0.6°/nA |
| Variable Gain Amplifier (VGA) | Settable Gain: 0–80 dB |
| Automatic Level Control (ALC) | Amplitude Control Voltage (VED): 0–0.5 V ED Time Constant: 8-Bit control |
| Background Compensation Path | Gain Control: −20 to 40 dB Phase Control: 0–180° |
| Day # | Fitted Coefficients | |
|---|---|---|
| m | c | |
| 1 | −1.022 | 27,035 |
| 2 | −1.169 | 26,964 |
| 3 | −1.459 | 27,067 |
| 4 | −1.128 | 26,997 |
| 5 | −1.1329 | 27,044 |
| 6 | −1.1458 | 26,968 |
| Mean value | −1.1761 | 27,012 |
| Properties | This Work | [28] | [29] | [3] |
|---|---|---|---|---|
| Resonator Type and Material | Single-Crystal SOI Lateral Comb-Drive | 3C-SiC, Comb-Drive | Capacitive Transduction H-Shaped Tuning Fork | Poly-Si Two-Port, Folded-Beam, Comb-Drive |
| Modes of Oscillation | 3 | 3 | 1 | 1 |
| Oscillation Frequencies (fosc) | ~27.0 kHz (Mode 1 Only) | 27.1 kHz, 30.3 kHz, 24.2 kHz | 32.768 kHz | 16.5 kHz |
| Q-Factor | 13,000 | 13,550,10,300 and 9480 | 52,000 | 23,400 |
| CMOS Sustaining Amplifier Chip | 0.5 μm CMOS | Discrete Components | 180 nm CMOS | CMOS Transimpedance Amplifier (TIA) |
| Die Size | 1.5 mm × 1.5 mm | Discrete Components | 1.55 mm × 0.85 mm | 420 µm × 320 µm (Resonator Only) |
| Supply Voltage (VDD) | 3.3 V | 3.0 V | 1.4–4.5 V | 2.5 V |
| SSB Phase Noise | −65 dBc/Hz @ 10 Hz Offset | −78 dBc/Hz @ 12 Hz Offset | Not Reported | −72 dBc/Hz @ 1 kHz Offset (Simulated) |
| FoM * | 133.61 | Not Reported | Not Reported | Not Reported |
| Startup Time | ~600 µs | Not Reported | 0.2 s | Not Reported |
| Real-Time Temperature Compensation | Yes | No | Yes | No |
| Temperature coeficients of frequency (TCf) | −34 ppm/°C (MEMS only); <±3 ppm (TCO) over 11.2 °C to +41.2 °C | 24.75 ppm /°C ** (rocking vibration mode of MEMS) over 26.85 °C to +426.85 °C | ±100 ppm (MEMS only); ±3 ppm (TCXO) & 100 ppm max (XO) over −40 °C to +85 °C | −10 ppm/°C (MEMS only) over 26.85 °C to +96.85 °C |
| Year | 2018 | 2009 | 2015 | 1999 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, M.S.; Wei, R.; Lee, J.; Xie, Y.; Mandal, S.; Feng, P.X.-L. A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip. Micromachines 2018, 9, 559. https://doi.org/10.3390/mi9110559
Islam MS, Wei R, Lee J, Xie Y, Mandal S, Feng PX-L. A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip. Micromachines. 2018; 9(11):559. https://doi.org/10.3390/mi9110559
Chicago/Turabian StyleIslam, Mohammad S., Ran Wei, Jaesung Lee, Yong Xie, Soumyajit Mandal, and Philip X.-L. Feng. 2018. "A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip" Micromachines 9, no. 11: 559. https://doi.org/10.3390/mi9110559
APA StyleIslam, M. S., Wei, R., Lee, J., Xie, Y., Mandal, S., & Feng, P. X.-L. (2018). A Temperature-Compensated Single-Crystal Silicon-on-Insulator (SOI) MEMS Oscillator with a CMOS Amplifier Chip. Micromachines, 9(11), 559. https://doi.org/10.3390/mi9110559