
Activity Recognition Using Fusion of Low-Cost Sensors on a Smartphone for Mobile Navigation Application



Abstract
:1. Introduction
2. Background

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Features |
|---|---|
| Time Domain | Mean, Variance, Standard Deviation (SD), Mean Absolute Error, Root Mean Square (RMS), Cumulative Histogram, Zero or Mean Crossing Rate, Peak Count & Amplitude, Quartile |
| Frequency Domain | Discrete Fast Furrier Transform (FFT) Coefficient, Spectral Centroid, Spectral Energy, Spectral Entropy, Frequency Range Power |
| Time-Frequency Domain | Wavelet Coefficient |
| Heuristic Features | Signal Magnitude Area (SMA), Inter-axis Correlation |
| Domain-Specific | Step Detection, Vertical or Horizontal Acceleration Projection |
3. Literature Review of Activity Recognition Utilizing Smartphones
| Reference | Number of Sensor | Placement of the Sensors | Activities Recognized | Classification Techniques | Accuracy |
|---|---|---|---|---|---|
| Foerster et al., 1999 [35] | 4 | Sternum, wrist, thigh, lower leg | 9 ambulation and posture | kNN | 95.8% |
| Aminian et al., 1999 [36] | 2 | Chest, thigh | 4 ambulation and posture | Rule-based | 89.3% |
| Laerhoven & Cakmakci, 2000 [37] | 1 | Thigh | 6 ambulation, posture and cycling | SOM | 42%–96% |
| Randell & Muller, 2000 [19] | 1 | Knee | 6 ambulation and posture | ANN | 85%–90% |
| Mantyjarvi, et al., 2001 [20] | 2 | Left and right hip | 4 ambulation, posture | PCA | 83%–90% |
| Lee & Mase, 2002 [21] | 1 | Thigh | 7 ambulation | Rule-based | 93%–96% |
| Chambers et al., 2002 [38] | 1 | Wrist | 4 Kung-Fu Movement | Hierarchical HMM | 96.7% |
| Kern et al., 2003 [39] | 12 | Ankle, knee, waist, wrist, elbow and shoulder (major joints) | Ambulation, writing on a white board, typing on a keyboard, shaking hands | Naive Bayes | 85% |
| Mathie & Coster, 2003 [40] | 1 | Waist | Ambulation with transitions | Threshold-based classification | NA |
| Bao & Intille, 2004 [23] | 5 | Wrist, upper arm, waist, thigh, ankle | 20 ambulation along with 20 other activities | Decision table, DT, Navies Bayes | 84.26% |
| Mathie & Celler, 2004 [41] | 1 | Waist | Ambulation with transitions | Binary DT | NA |
| Ravi et al., 2005 [24] | 1 | Waist | 8 ambulation, vacuuming, brushing teeth | Decision table, DT, kNN, SVM, Naive Bayes | 73.33%–99% |
| Allen & Ambikairajah, 2006 [42] | 1 | Waist | Ambulation with transitions | GMM | 76.6% |
| Olgun & Pentland, 2006 [43] | 3 | Wrist, waist, chest | Ambulation, crawling, hand movements | HMM | 92.1% |
| Karantonis & Narayanan 2006 [44] | 1 | Waist | Ambulation, posture, energy expenditure | Binary DT | 90.8% |
| Heinz et al., 2006 [45] | 8 | Rear hip, neck, wrists, knees and lower legs | Ambulation | Threshold-based, NB | NA |
| Lester et al., 2006 [46] | 3 | Shoulder, waist, wrist | Ambulation, riding elevators, brushing teeth | HMM | 90% |
| Tseng & Cook, 2006 [47] | 3 | Neck, waist, ankle | Walking for detecting age and health condition | MLP, SVM, DT, NB, BN | 85.7% |
| Maurer & A. Smailagic, 2006 [48] | 6 | Wrist, belt, necklace, pocket, bag | Ambulation | DT, kNN, NB, BN | 89.5% |
| Ward et al., 2006 [22] | 2 | Wrist, elbow | Workshop activities | HMM | 72% |
| Bidargaddi et al., 2007 [49] | 1 | Waist | Walking from rowing, biking, arms exercise, ball workout | Threshold- based | 89.1% |
| Ibrahim & Ambikairajah, 2007 [50] | 1 | Hip | different walking patterns | GMM | 88.8% |
| Lombriser et al., 2007 [51] | 7 | Wrist | Ambulation | kNN | 91% |
| Suutala et al., 2007 [52] | 4 | Thigh, left and right wrist, neck | Ambulation, brushing, cleaning | SVM, HMM | 93% |
| Muscillo & S. Conforta, 2007 [53] | 1 | Ankle | Walking and climbing stairs | DTW based kNN | 85% |
| Jafari et al., 2007 [54] | 1 | Chest | Transitions between different ambulation | ANN, kNN | 84% |
| Al-ani et al., 2007 [55] | 1 | Waist | Different walking speeds, falls, transitions | HMM | NA |
| Krishnan & D. Colbry, 2008 [56] | 2 | Ankle, above the knee | Ambulation | AdaBoost, LR, SVM | 95% |
| Yang, et al., 2008 [30] | - | Wrist | Ambulation | ANN | 95% |
| Zappi et al., 2008 [57] | 10 | 10 for right arm, 9 for left arm | Ambulation | HMM | 87.4% |
| He et al., 2008 [58] | - | NA | Ambulation | SVM | 82.2% |
| Wu et al., 2008 [59] | 1 | Knee | Ambulation | Naive Bayes | NA |
| Choudhury et al., 2008 [60] | 3 | Wrist, waist, shoulder | Ambulation, posture, brushing teeth | HMM | 93.8% |
| Huynh et al., 2008 [61] | 2 | Hip, wrist | 34 ambulation, posture, working, home actions | LSA | 72.7% |
| Bicocchi et al., 2008 [1] | 1 | Waist | 4 ambulation, posture | Gaussian Mixture | 85% |
| Krishnan et al., 2009 [62] | 3 | Wrist , Elbow | 5 hand movement | HMM, AdaBoost, kNN | 65.4%–87% |
| Bicocchi et al., 2010 [1] | 3 | Arm, waist, leg | 16 ambulation, working, home action | kNN | 95% |
| Susi et al., 2013 [63] | 2 | Hand and bag | swinging, texting/phoning/bag and Irregular motion | DT | 95%, 98% & 94% |
| Reference | Device (OS) | Activity | Mobile Position | Frequency (Hz) | Feature Space | Classifier | Accuracy | Number of Subjects |
|---|---|---|---|---|---|---|---|---|
| Ofstad et al., 2008 [64] | Nokia N95, (Symbian) | Standing, Sitting | Right trousers pocket | 1 | Raw data | Bayesian | 98.9% | 1 |
| Miluzzo et al., 2008 [29] | Nokia N95 (Symbian) | Walking, Running, Sitting, Standing | Pocket, on a lanyard, clipped to a belt | NA | Variance, Mean, Num. of peaks | J48 DT | 68%, 78%, 94%, 74% for activities | 8 |
| Yang 2009 [30] | Nokia N95 (Symbian) | Standing, Walking, Running, Driving, Bicycling | In different (vertical and horizontal components computed) | 36 | Mean, SD, ZCR, 75% percentile, Interquartile range, Power spectrum, Entropy, Cross-correlation | C4.5 DT, NB, kNN, LibSVM | 91% best performance | 4 |
| Albert et al., 2012 [65] | Android 1.6 | Sitting, Standing, Walking, Standing | Front pocket | 15–25 | Mean, Moments, RMS, Extremes, Histogram, FT, Cross product means: xy, xz, yz | SVM, regularized logistic regression | 96.1% of healthy subjects and 92.2% of Parkinson’s patients | 18 healthy and 8 Parkinson’s patients |
| Brezmes et al., 2009 [2] | Nokia N95 Accelerometer | Walking Climbing-down/upstairs, Sitting, falling, Standing up | Chest pocket, front trousers pocket, a rear trousers pocket, an inner jacket pocket, etc. | 30 | Not mentioned Time-frequency domain | kNN | 80% | NA |
| Khan et al., 2010 [66] | Samsung Omnia (Win mobile 6) | Sitting, Walking, Up-stairs, Down-Stairs, Running | Shirt’s top pocket, Jeans’ front pocket, rear pocket, coat’s inner pocket | 45 | Autoregressive Coefficients SMA Linear Discriminant Analysis Kernel Discriminant Analysis | ANN | 96% | 6 |
| Zhang et al., 2010 [67] | HTC touch (Win mobile 6) | Sitting, Standing, Lying, Walking, Posture transition | The same place on bodies for all the activities | 1 | Raw data | Multi-class SVM | 82.8% | 10 |
| Sun et al., 2010 [68] | Nokia N97 (Symbian) | Stationary, Walking, Running, Bicycling, Ascending/descending stairs, Driving | 6 pockets (2 front, 2 rear trousers and 2 front jacket pockets) 4 positions inside | 10 (averaging data) | Mean, Variance Correlation, FFT energy, Entropy | SVM | 91.6% (unknown position), 94.8% (Known position) | 7 |
| Kwapisz et al., 2010 [4] | Nexus One, HTC Hero, and Motorola Backflip (Android) | Walking, Jogging, Up/Down Sitting, Standing | User’s pocket | NA | Mean, SD, Absolute Difference, RMS, Time Between Peaks, Histogram | J48, Logistic Regression, Multilayer Perceptron, Straw Man | 85.1%, 78.1%, 91.7%, 37.2% for different activities | 29 |
| Pei et al., 2013 [34] | Samsung Galaxy Nexus (Android) | Sitting, Normal-, fast-walking, Standing, Sharp-, gradient-turning | User’s pants pocket, specific direction | NA | Selected features: Variance and mean of horizontal and vertical Accelerometer and Gyroscope | Least Square-SVM | 92.9% for motion recognition | 4 |
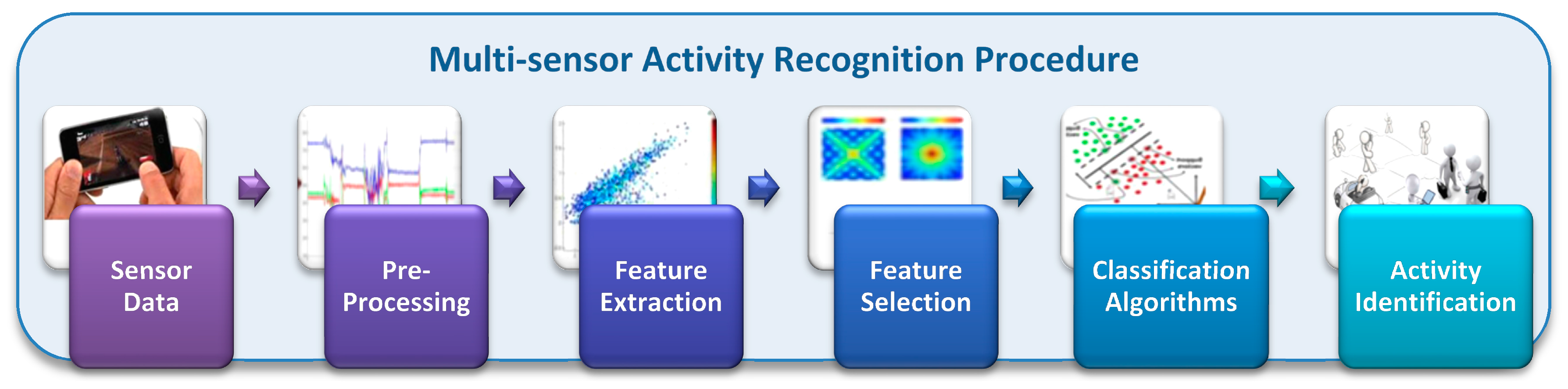
4. Developing an Activity Recognition Using MEMS Sensors
4.1. Preprocessing and Sensor Calibration
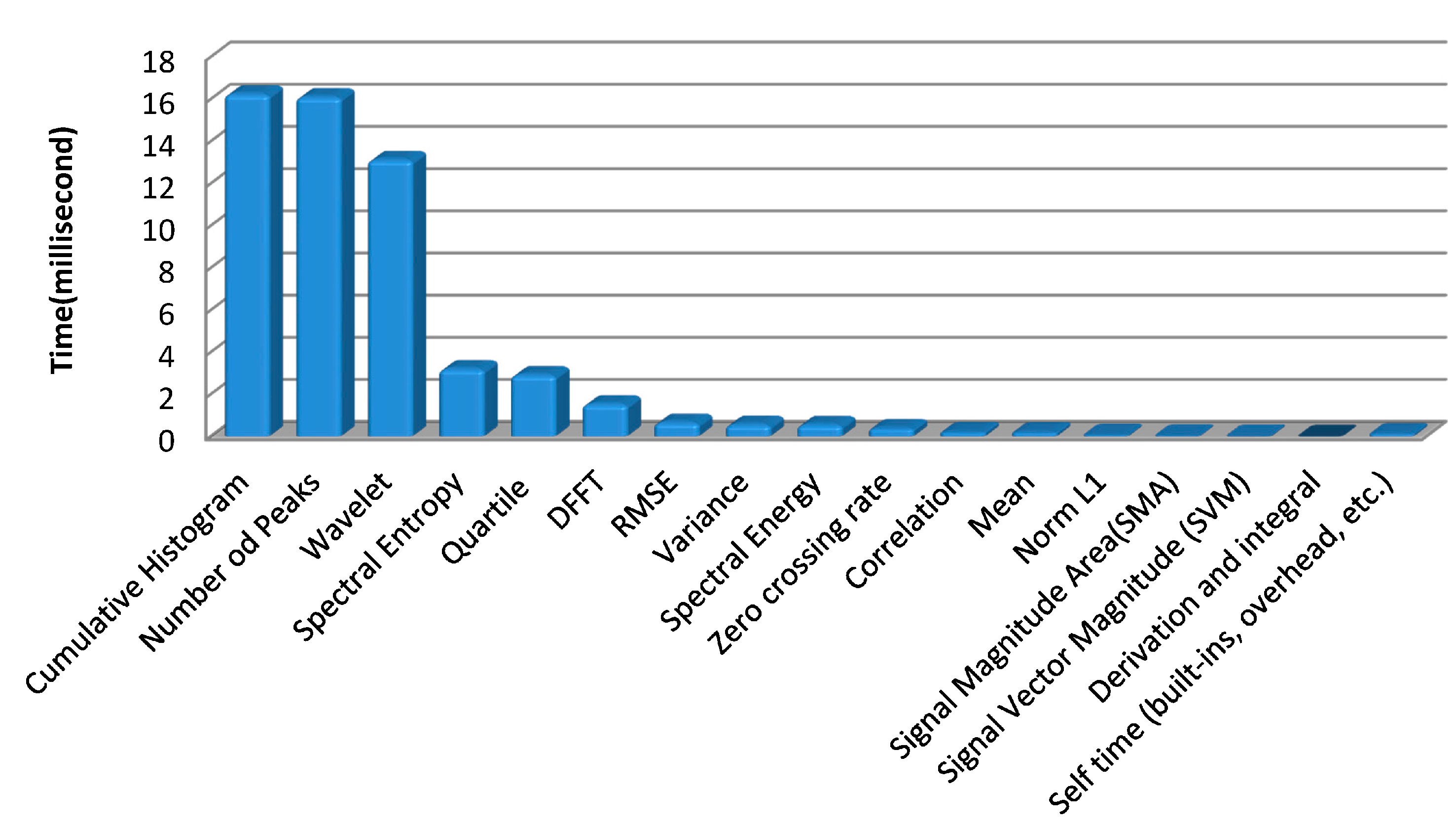
4.2. Feature Extraction
4.3. Feature Selection
4.4. Classification Algorithms
- Each pattern should be assigned to a class, i.e., .
- Each pattern is assigned to one and only one class (in case of hard classification only), i.e., Ck ∩ Cj = 0, where k ≠ j.
| Name | Algorithm | Criteria |
|---|---|---|
| CFS | A filter algorithm to ranks feature subsets (f) in the search space of all possible feature subsets according to a correlation based heuristic evaluation measure (Mf). | Ranking features that are correlated with the class and uncorrelated with each other. where : features, f: feature subset, : mean feature-class correlation, : average feature-feature intercorrelation. |
| PCA | A transformation to convert a set of features into a set of linearly uncorrelated variables called principal components. This can result in a loss of meaning from the original features representation and the interpretation of induced models. | Normalizing feature-space and calculating the covariance matrix, finding the eigenvectors and eigenvalues and then selecting the eigenvectors corresponding to the first m largest eigenvalues and denote these eigenvectors as new feature space and comparing the BN classification accuracy for these two sets of features. |
| SVM | A wrapper techniques for feature selection using greedy algorithms (start with none or all features and remove/add until the error doesn’t improve). SVM with linear kernels used as a model and select features which improve the error returned by the SVM classifier. | For each feature p with E(−p)(α, σ) = 1 the following criteria can be computed t determine the irrelevant features: where VAL is the Validation subset and and are the objects and labels of this subset, respectively. means training object i (validation object l) with feature p removed. E(−p)(α, σ) is the number of errors in the Validation Subset when feature p is removed, using the currently selected features as indicated by σ. |
| Gain Ratio | The algorithm is applied recursively to form sub-trees, terminating when a given subset contains instances of only one class. A C4.5 uses gain ratio which applies normalization to information gain [78]. | The gain ratio is defined as . Gain ratio is used as one of disparity measures and the high gain ratio for selected feature implies that the feature will be selected as the splitting attribute and useful for classification. |
| Classification Methods | Description |
|---|---|
| k-Nearest Neighbour (kNN) | kNN is based on the closest training samples in the feature space. The most popular similarity measure to find the closest samples is the Euclidean distance. k denotes the number of classes. |
| Naïve Bayes (NB) | NB is a simple probabilistic classifier which uses Bayes’ theorem with naive independence assumptions. This assumption simplifies the estimation of P(ActivityClass|feature) from the training data. |
| Bayesian Network (BN) | BN is a probabilistic graphical model that encodes probabilistic dependencies among the corresponding variables of interest by using training dataset. BN is used to learn relationships between activity classes and feature space to predict the class labels for a new sample [79,80]. |
| Decision Tree (DT) | DT is a classifier that predicts the activity classes (dependent variable) of a new sample based on features values. The internal nodes of a decision tree denote the different features; the branches between the nodes tell us the possible values that these features can have in the observed samples, while the terminal nodes tell us the final value (classification) of the dependent variable. The algorithm used to generate a decision tree is information entropy [81]. |
| Artificial Neural Network (ANN) | ANNs are capable of “learning” patterns by a number of known training patterns. In this research the used ANN has three layers; input layer, hidden layer and output layer. A simple back propagation algorithm (using RMSE) is used as the learning process. |
| Support Vector Machine (SVM) | SVMs are binary classifiers, derived from statistical learning theory and kernel-based methods. In this research using (Gaussian) radial basis function, a non-linear learning model is adapted for different activities [82]. |
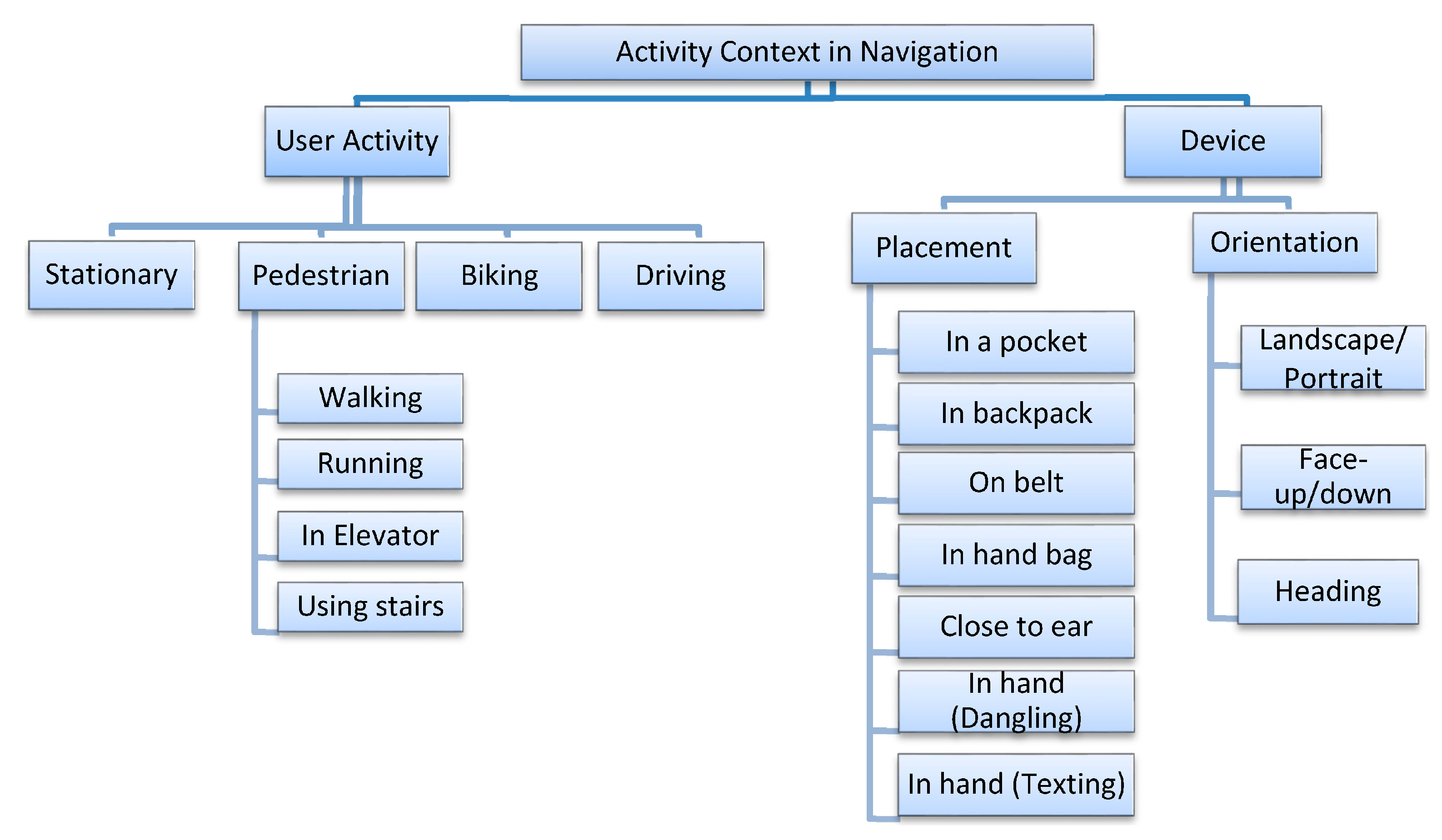
5. Experiment and Results
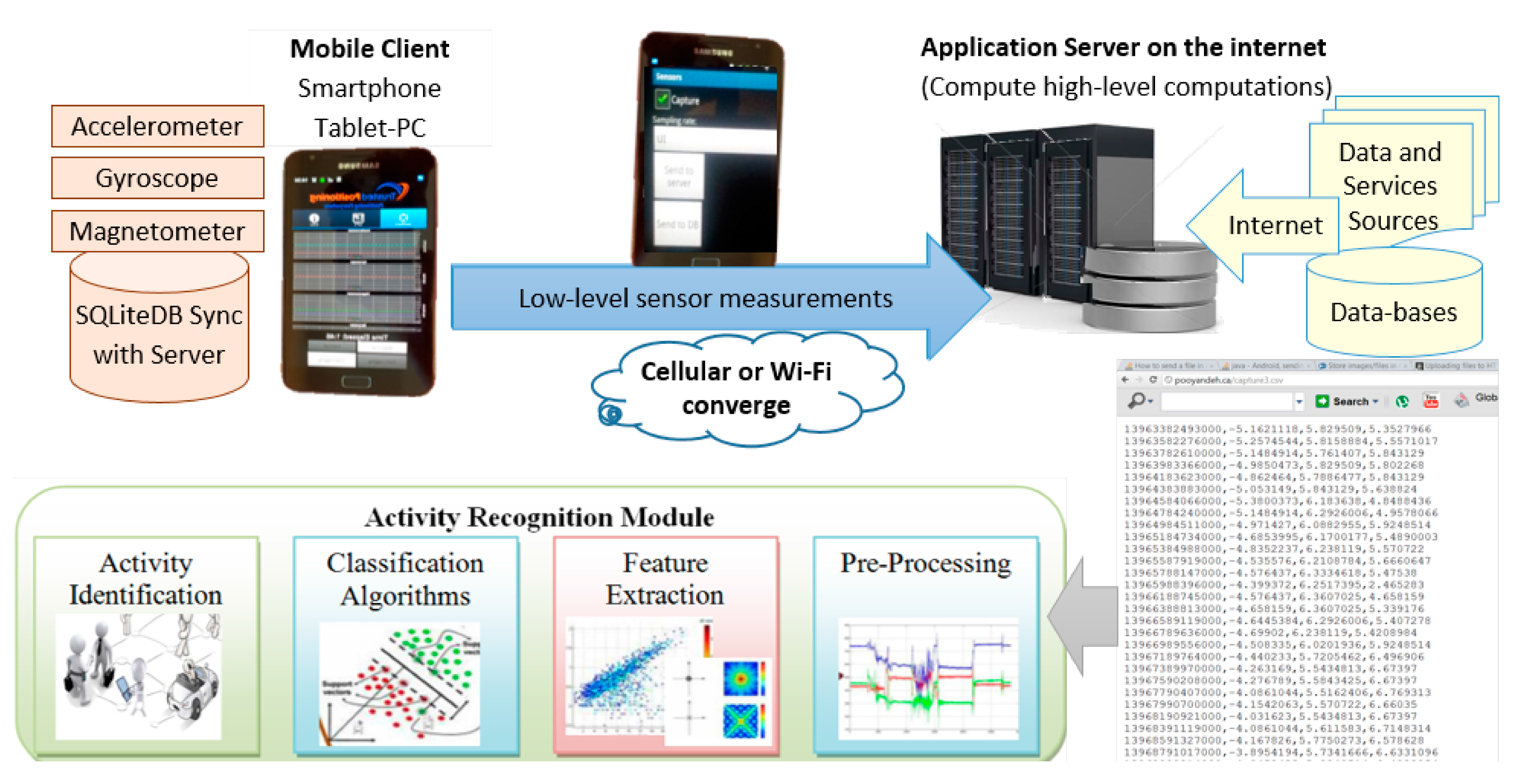
5.1. Training and Test Data Collection
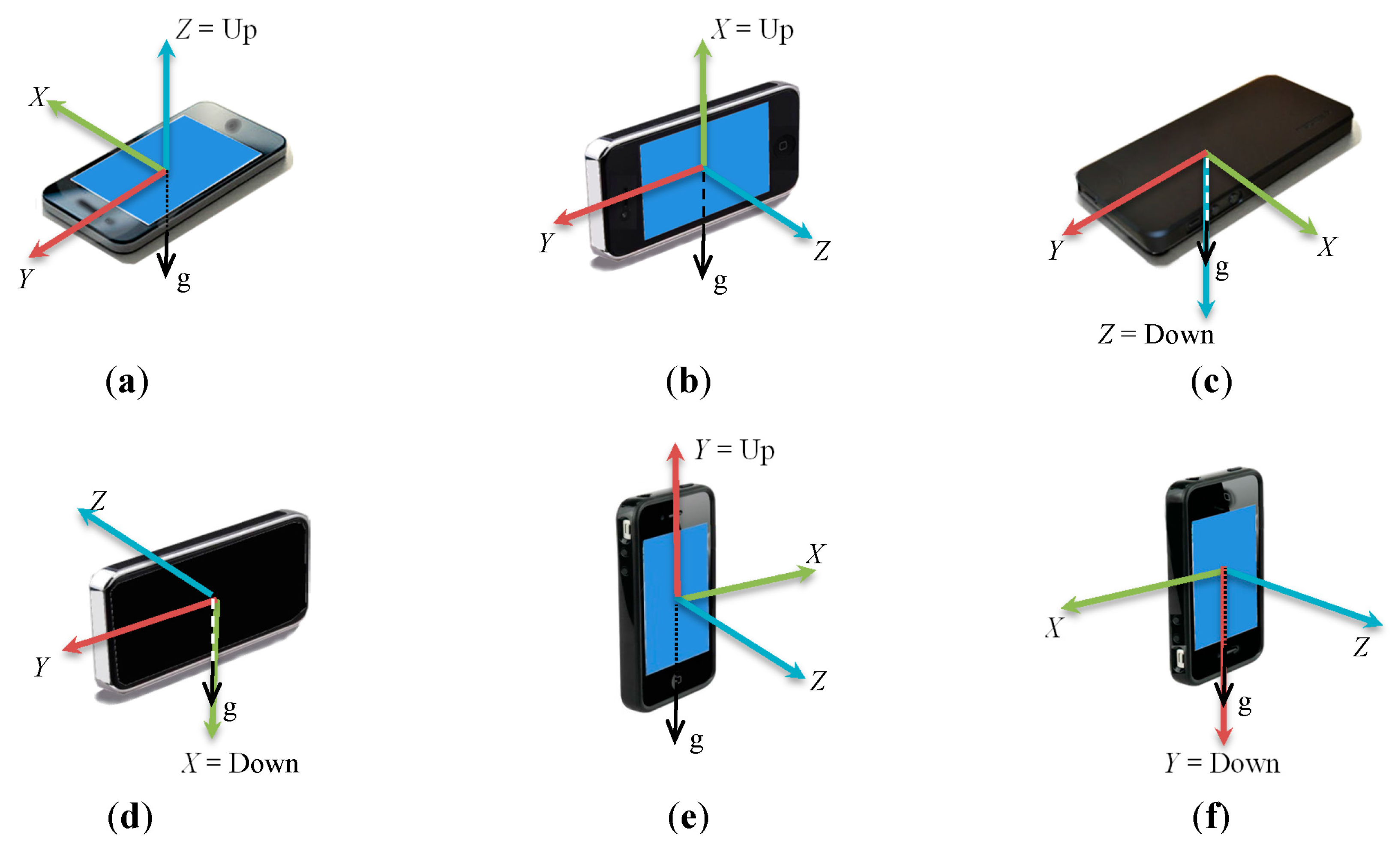
5.2. Preprocessing and Calibration
5.3. What Is the Best Sampling Frequency?
| Label | Average Frequency | Max Frequency | Min Frequency | Battery Consumption (%/h) |
|---|---|---|---|---|
| Normal | 4.74 | 4.81 | 4.49 | 1.71 |
| User Interface | 14.15 | 14.19 | 11.64 | 3.19 |
| Game | 32.55 | 32.8 | 22.75 | 3.27 |
| Fastest | 94.77 | 96.44 | 37.68 | 3.41 |
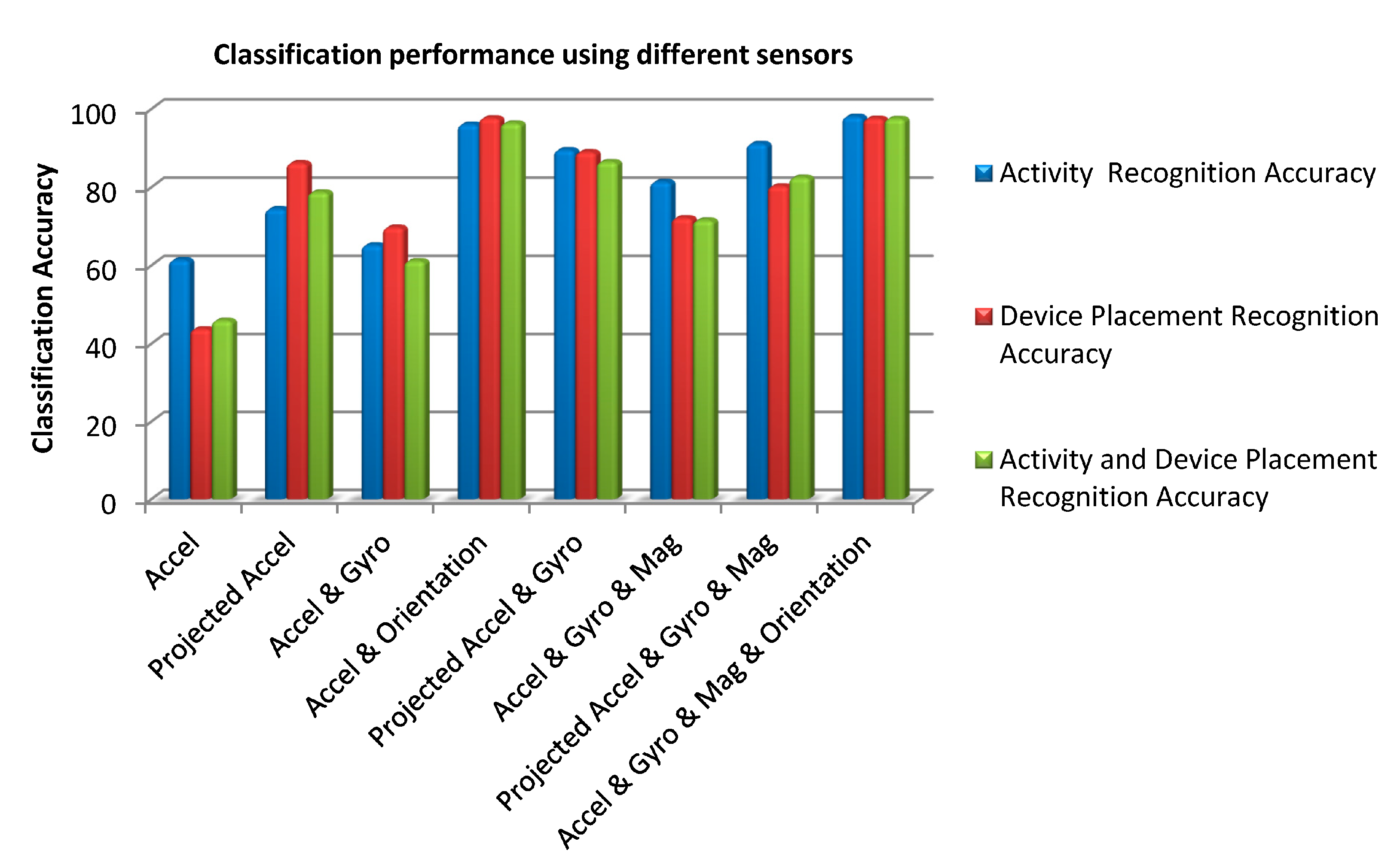
5.4. What Is the Useful Sensor Information?

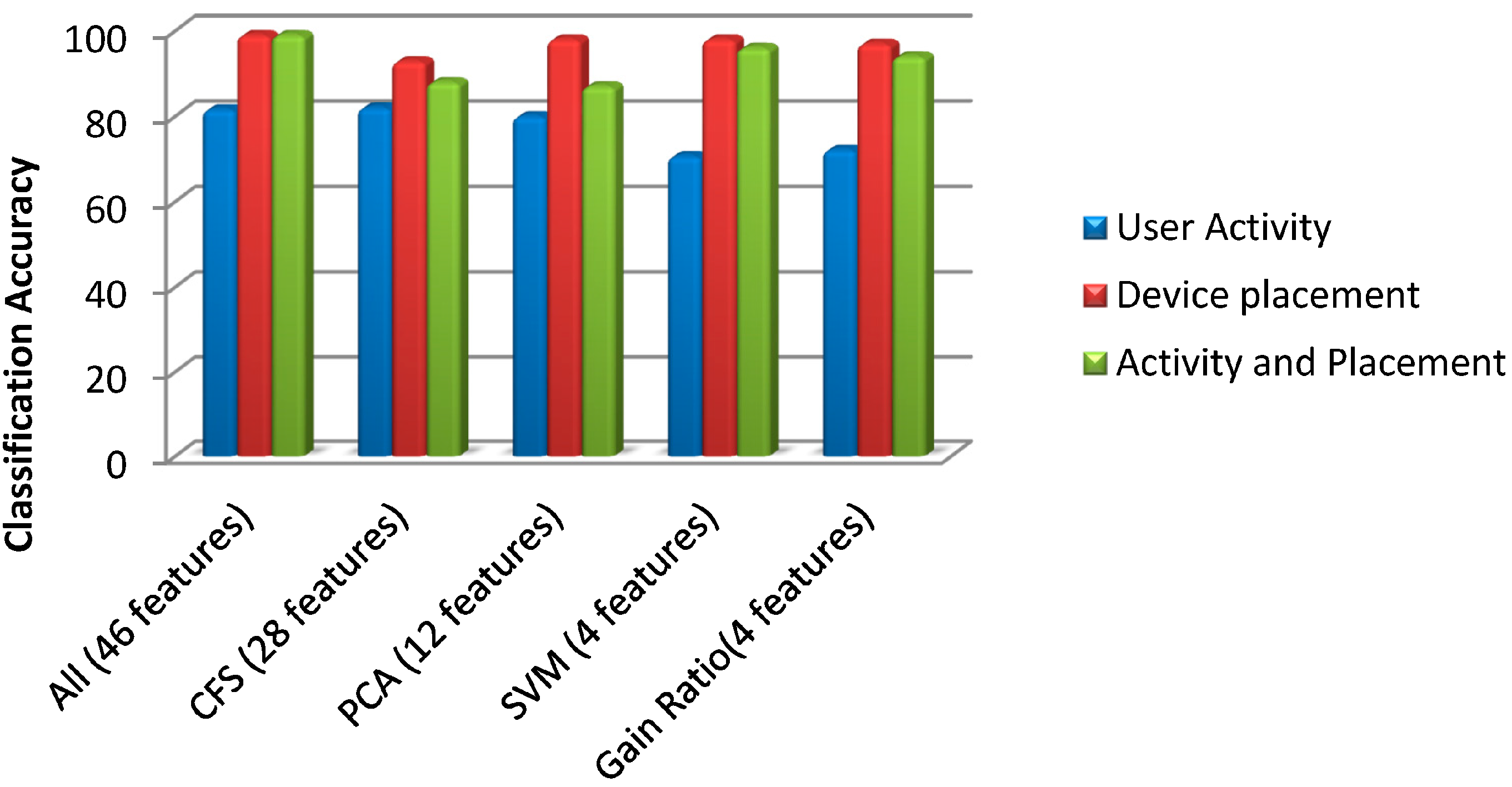
5.5. What Is the Optimums Set of Features?
5.6. What Is the Optimum Feature Selection Method?
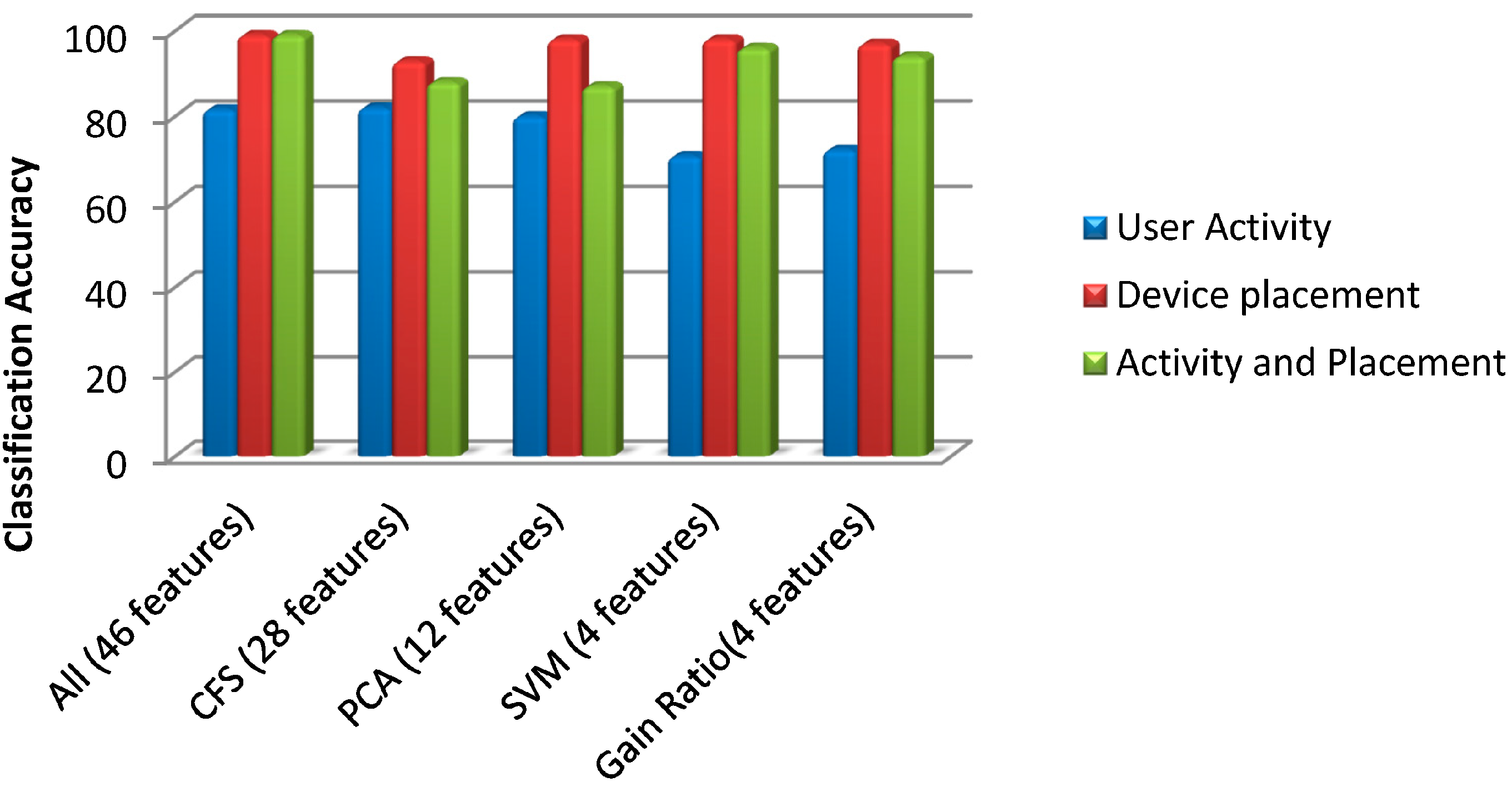
| Recognition Scenario | Selected Feature (SVM) | Selected Feature (Gain Ratio) |
|---|---|---|
| Recognition of User Activity | Quartile | Mean |
| Standard Deviation | RMS | |
| Spectral Energy | Frequency Range Power | |
| Frequency Range Power | Spectral Entropy | |
| Accuracy | 70.6% | 72.1% |
| Recognition of Device Placement | Frequency Range Power | Standard Deviation |
| Spectral Entropy | Frequency Range Power | |
| Zero Crossing | RMS | |
| Variance | Spectral Energy | |
| Accuracy | 98.1% | 97.3% |
| Recognition of Activity & Device Placement | Frequency Range Power | Mean |
| Spectral Entropy | RMS | |
| Zero Crossing | Spectral Energy | |
| Quartile | Frequency Range Power | |
| Accuracy | 96.2% | 94.4% |
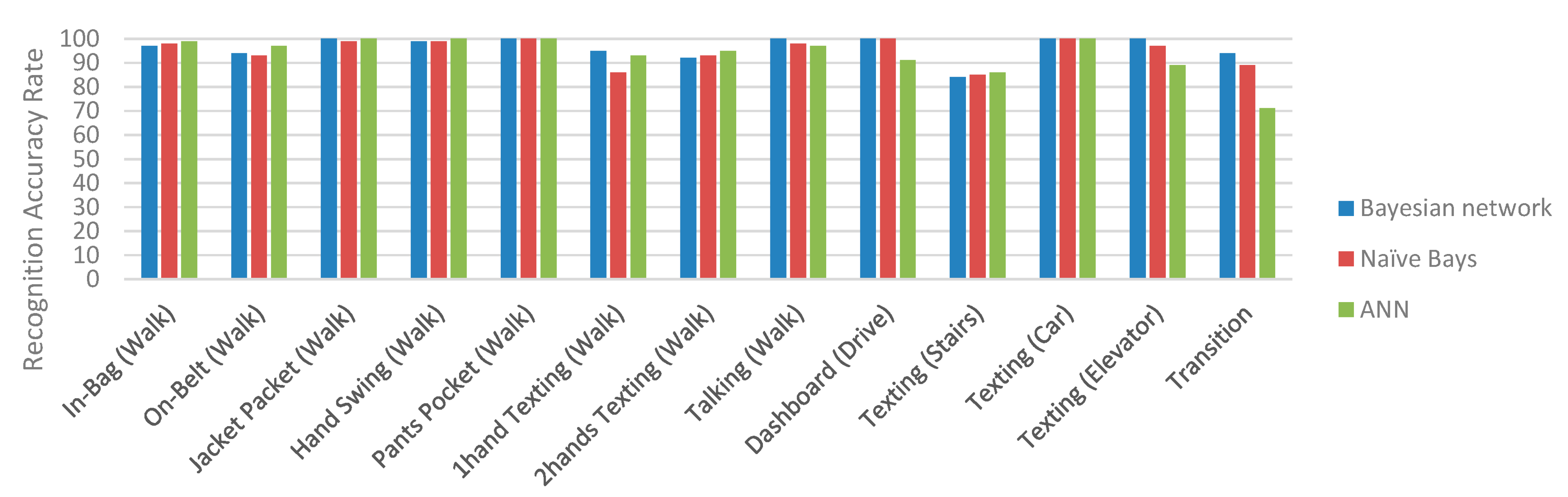
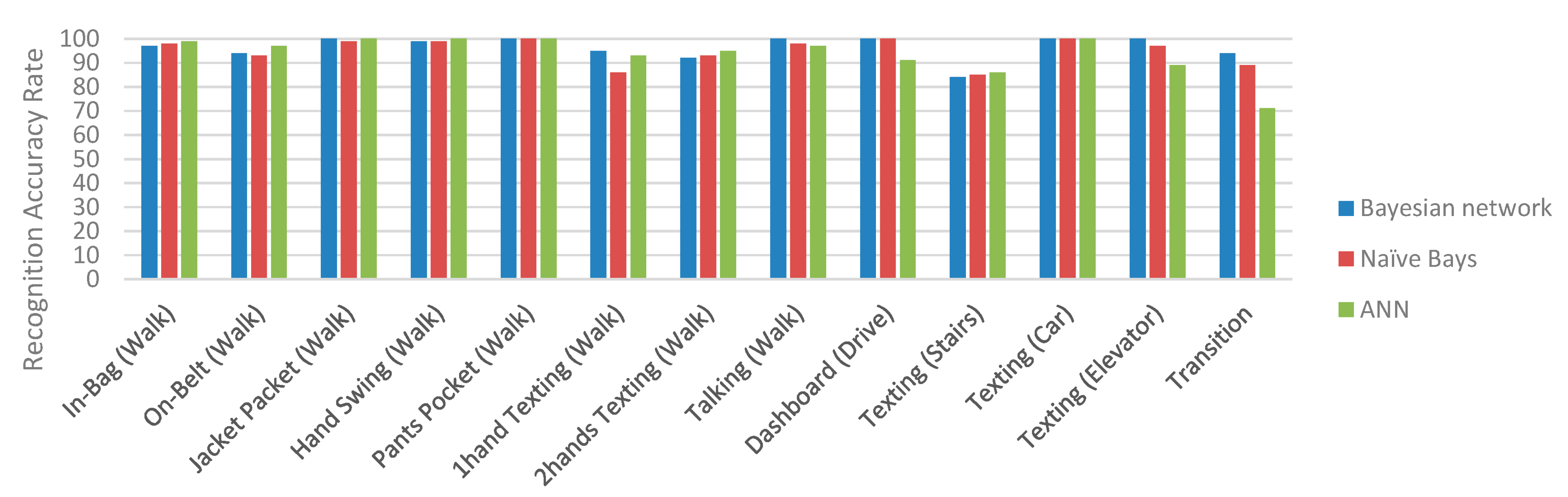
5.7. What Is the Best Classification Algorithm?
- “Belt” is often misclassified as “Pocket”;
- “Pocket” is often misclassified as “Backpack”;
- “Backpack” is sometimes misclassified as “Belt” and “Reading”.
| BN Classifier | Walking Bag | Walking Belt | Walking Jacket | Walking Hand | Walking Pants | Walking Texting1 | Walking Texting2 | Walking Talking | Transition | Driving Dashboard | Stairs U/D Texting1 | Running Hand | Elevator-Texting1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Walking Bag | 763 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 5 | 0 | 3 | 0 | 0 |
| Walking Belt | 0 | 575 | 0 | 0 | 32 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Walking Jacket | 0 | 0 | 629 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Walking Hand | 2 | 0 | 0 | 922 | 0 | 0 | 0 | 0 | 3 | 0 | 1 | 0 | 0 |
| Walking Pants | 1 | 0 | 0 | 0 | 893 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Walking Texting1 | 0 | 0 | 0 | 0 | 6 | 1961 | 0 | 0 | 0 | 0 | 131 | 0 | 0 |
| Walking Texting2 | 0 | 13 | 0 | 0 | 0 | 101 | 641 | 0 | 0 | 0 | 7 | 0 | 0 |
| Walking Talking | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 801 | 1 | 1 | 0 | 0 | 0 |
| Transition | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 35 | 825 | 0 | 44 | 0 | 0 |
| Driving Dashboard | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 504 | 0 | 0 | 0 |
| Stairs U/D Texting1 | 0 | 0 | 0 | 0 | 0 | 235 | 33 | 0 | 80 | 0 | 818 | 0 | 0 |
| Running Hand | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 531 | 0 |
| Elevator Texting1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 541 |
| Classifier | Accuracy | Time |
|---|---|---|
| Bayes Network | 96.21 | 0.72 |
| SVM | 85.45 | 0.76 |
| Naive Bayes Classifier | 84.2 | 0.04 |
| J48 pruned tree | 93.4 | 0.39 |
| ANN (Multi-Layer Perceptron) | 89.8 | 1.84 |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bicocchi, N.; Mamei, M.; Zambonelli, F. Detecting Activities from Body-Worn Accelerometers via Instance-based Algorithms. Pervasive Mob. Comput. J. 2010, 6, 482–495. [Google Scholar] [CrossRef]
- Brezmes, T.; Gorricho, J.; Cotrina, J. Activity Recognition from Accelerometer Data on Mobile Phones. In Proceedings of the 10th International Work Conference on Artificial Neural Networks, Salamanca, Spain, 10–12 June 2009.
- Khan, A.M.; Tufail, A.; Khattak, A.M.; Laine, T.H. Activity Recognition on Smartphones via Sensor-Fusion and KDA-Based SVMs. Int. J. Distrib. Sens. Netw. 2014. [Google Scholar] [CrossRef]
- Kwapisz, J.; Weiss, G.; Moore, S.A. Activity Recognition Using Cell Phone Accelerometers. ACM SigKDD Explor. Newslett. 2010, 12, 74–82. [Google Scholar] [CrossRef]
- Pollack, M.; Brown, L.; Colbry, D.; McCarthy, C.; Orosz, C.; Peintner, B.; Tsamardinos, I. Autominder: An intelligent cognitive orthotic system for people with memory impairment. Robot. Auton. Syst. 2003, 44, 273–282. [Google Scholar] [CrossRef]
- Mantyjarvi, J.; Alahuhta, P.; Saarinen, A. Wearable Sensing and Disease Monitoring in Home Environment. In Proceedings of the 2nd European Symposium on Ambient Intelligence Technologies for WellBeing at Home, Eindhoven, The Netherlands, 8–11 November 2004.
- Chen, W.; Wei, D.; Ding, S.; Cohen, M.; Wang, H.; Tokinoya, S.; Takeda, N. A scalable mobile phone-based system for multiple vital signs monitoring and healthcare. Int. J. Pervesive Comput. Commun. 2005, 1, 157–163. [Google Scholar] [CrossRef]
- Yin, J.; Yang, Q.; Pan, J. Sensor-Based Abnormal Human-Activity Detection. IEEE Trans. Knowl. Data Eng. 2008, 20, 1082–1090. [Google Scholar] [CrossRef]
- Liao, L.; Fox, D.; Kautz, H. Location-based activity recognition. Available online: http://www.researchgate.net/profile/Dieter_Fox/publication/220270180_Location-based_activity_recognition/links/0c96052a6c4944c196000000.pdf (accessed on 1 June 2015).
- Patterson, D.J.; Liao, L.; Gajos, K.; Collier, M.; Livic, N.; Olson, K.; Wang, S.; Fox, D.; Kautz, H. Opportunity Knocks: A System to Provide Cognitive Assistance with Transportation Services. In Proceedings of the 6th International Conference on Ubiquitous Computing, Nottingham, UK, 7–10 September 2004.
- Zheng, Y.; Liu, L.; Wang, L.; Xie, X. Learning Transportation Mode from Raw GPS Data for Geographic Applications on the Web. In Proceedings of the 17th international conference on World Wide Web, Beijing, China, 21–25 April 2008.
- Lamming, M.; Flynn, M. “Forget-Me-Not”: Intimate Computing in Support of Human Memory. In Proceedings of the FRIEND21 Symposium on Next Generation Human Interfaces, Meguro Gajoen, Japan, 2–4 February 1994.
- Avci, A.; Bosch, S.; Marin-Perianu, M.; Marin-Perianu, R.; Havinga, P. Activity Recognition Using Inertial Sensing for Healthcare, Wellbeing and Sports Applications: A Survey. In Proceedings of the 23th International Conference on Architecture of Conference on Architecture of Computing Systems, Hannover, Germany, 22–23 Febuary 2010; pp. 167–176.
- Mokbel, M.; Levandoski, J.J. Towards Context and Preference-Aware Location-Based Services. In Proceedings of the ACM International Workshop on Data Engineering for Wireless and Mobile Access, Rhode Island, RI, USA, 29 June 2009; pp. 25–32.
- Saeedi, S.; El-Sheimy, N.; Zhao, X.; Sayed, Z. Context Aware Mobile Personal Navigation Services Using Multi-Level Sensor Fusion. In Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation, Portland, OR, USA, 20–23 September 2011; pp. 1394–1403.
- Saeedi, S.; Moussa, A.; El-Sheimy, N. Context-aware personal navigation using embedded sensor fusion in smartphones. Sensors 2014, 14, 5742–5767. [Google Scholar] [CrossRef] [PubMed]
- Logan, B.; Healey, J.; Philipose, M.; Tapia, E.; Intille, S.S. A Long-Term Evaluation of Sensing Modalities for Activity Recognition. In Proceedings of the 9th International Conference on Ubiquitous Computing, Innsbruck, Austria, 16–19 September 2007; pp. 483–500.
- Kern, N.; Schiele, B.; Schmidt, A. Recognizing context for annotating a live life recording. Pers. Ubiquitous Comput. 2007, 11, 251–263. [Google Scholar] [CrossRef]
- Randell, C.; Muller, H. Context Awareness by Analysing Accelerometer Data. In Proceedings of the International Symposium on Wearable Computers, Atlanta, GA, USA, 16–17 October 2000; pp. 175–176.
- Mantyjarvi, J.; Himberg, J.; Seppanen, T. Recognizing Human Motion with Multiple Acceleration Sensors. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Tucson, AZ, USA, 7–10 October 2001; pp. 747–752.
- Lee, S.; Mase, K. Activity and location recognition using wearable sensors. IEEE Pervasive Comput. 2002, 1, 24–32. [Google Scholar]
- Ward, J.A.; Lukowicz, P.; Troster, G.; Starner, T.E. Activity recognition of assembly tasks using body-worn microphones and accelerometers. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1553–1567. [Google Scholar] [CrossRef] [PubMed]
- Bao, L.; Intille, S. Activity Recognition from User-Annotated Acceleration Data. In Proceedings of the 2nd International Conference on Pervasive Computing, Linz/Vienna, Austria, 21–23 April 2004; pp. 1–17.
- Ravi, N.; Dandekar, N.; Mysore, P.; Littman, M. Activity Recognition from Accelerometer Data. In Proceedings of the Seventeenth Conference on Innovative Applications of Artificial Intelligence, Menlo Park, CA, USA, 9–13 July 2005; pp. 1541–1546.
- Yi, J.S.; Choi, Y.S.; Jacko, J.A.; Sears, A. Context Awareness via a Single Device-Attached Accelerometer during Mobile Computing. In Proceedings of the seventh international conference on human computer Interaction with Mobile Devices & Services, New York, NY, USA, 19 September 2005; pp. 303–306.
- Györbíró, N.; Fábián, Á.; Hományi, G. An activity recognition system for mobile phones. Mob. Netw. Appl. Arch. 2009, 14, 82–91. [Google Scholar] [CrossRef]
- Yang, J.; Lu, H.; Liu, Z.; Boda, P.P. Physical Activity Recognition with Mobile Phones: Challenges, Methods, and Applications. In Multimedia Interaction and Intelligent User Interface; Springer: London, UK, 2010; pp. 185–213. [Google Scholar]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; Morgan Kaufmann: San Francisco, CA, USA, 1988. [Google Scholar]
- Miluzzo, E.; Lane, N.; Fodor, K.; Peterson, R.; Lu, H.; Musolesi, M.; Campbell, A. The design, implementation and evaluation of the CenceMe application. In Proceedings of the 6th ACM Conference on Sensing meets mobile social networks, Raleigh, NC, USA, 5–7 November 2008.
- Yang, J. Toward physical activity diary: Motion Recognition Using Simple Acceleration Features with Mobile Phones. In Proceedings of the First International Workshop on Interactive Multimedia for Consumer Electronics at ACM Multimedia, Beijing, China, 23 October 2009.
- Kunze, K.; Lukowicz, P. Dealing with Sensor Displacement in Motion-Based Onbody Activity Recognition Systems. In Proceedings of the 10th International Conference on Ubiquitous Computing, New York, NY, USA, 21–24 September 2008; pp. 20–29.
- Pei, L.; Chen, R.; Liu, J.; Chen, W.; Kuusniemi, H.; Tenhunen, T.; Takala, J. Motion Recognition Assisted Indoor Wireless Navigation on a Mobile Phone. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010.
- Elhoushi, M.; Georgy, J.; Korenberg, M.; Noureldin, A. Robust motion mode recognition for portable navigation independent on device usage. In Proceedings of the Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 158–163.
- Pei, L.; Guinness, R.; Chen, R.; Liu, J.; Kuusniemi, H.; Chen, Y.; Kaistinen, J. Human Behavior Cognition Using Smartphone Sensors. Sensors 2013, 13, 1402–1424. [Google Scholar] [CrossRef] [PubMed]
- Foerster, F.; Smeja, M.; Fahrenberg, J. Detection of posture and motion by accelerometery: A validation study in ambulatory monitoring. J. Comput. Hum. Behav. 1999, 15, 571–583. [Google Scholar] [CrossRef]
- Aminian, K.; Robert, P.; Buchser, E.E.; Rutschmann, B.; Hayoz, D.; Depairon, M. Physical activity monitoring based on accelerometry: validation and comparison with video observation. Med. Biol. Eng. Comput. 1997, 37, 304–328. [Google Scholar] [CrossRef]
- Laerhoven, K.; Cakmakci, O. What shall we teach our pants. In Proceedings of the International Symposium on Wearable Computers, Atlanta, GA, USA, 16–17 October 2000.
- Chambers, G.; Venkatesh, S.; West, G.A.M.; Bui, H.H. Hierarchical recognition of intentional human gestures for sports video annotation. In Proceedings of the 16th International Conference on Pattern Recognition, Quebec City, QC, Canada, 11–15 August 2002; pp. 1082–1085.
- Kern, N.; Schiele, B.; Junker, H.; Lukowicz, P.; Tröster, G. Wearable sensing to annotate meeting recordings. Pers. Ubiquitous Comput. 2003, 7, 263–274. [Google Scholar] [CrossRef]
- Mathie, M.; Coster, A. Detection of daily physical activities using a triaxial accelerometer. J. Med. Biol. Eng. Comput. 2003, 41, 296–301. [Google Scholar] [CrossRef]
- Mathie, M.; Celler, B. Classification of basic daily movements using a tri-axial accelerometer. J. Med. Biol. Eng. Comput. 2004, 42, 679–687. [Google Scholar] [CrossRef]
- Allen, F.; Ambikairajah, E. An adapted Gaussian mixture model approach to accelerometery based movement classification using time-domain features. In Proceedings of the International Conference on Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 Sepetember 2006.
- Olgun, D.; Pentland, A. Human activity recognition: accuracy across common locations for wearable sensors. In Proceedings of the International Symposium on Wearable Computing (Student Colloquium Proceedings), Montreaux, Switzerland, 11–14 October 2006.
- Karantonis, D.; Narayanan, M. Implementation of a real-time human movement classifier using a tri-axial accelerometer for ambulatory monitoring. IEEE Trans. Inf. Technol. Biomed. 2006, 10, 156–167. [Google Scholar] [CrossRef] [PubMed]
- Heinz, E.A.; Kunze, K.S.; Gruber, M.; Bannach, D.; Lukowicz, P. Using wearable sensors for Real-Time recognition tasks in games of martial arts—An initial experiment. In Proceedings of the 2006 IEEE Symposium on Computational Intelligence and Games, Reno, NV, USA, 22–24 May 2006; pp. 98–102.
- Lester, J.; Choudhury, T.; Borriello, G. A practical approach to recognizing physical activities. In Proceedings of the PERVASIVE Conference 2006, Dublin, Ireland, 7–10 May 2006.
- Tseng, C.; Cook, D. Mining from time series human movement data. In Proceedings of the International Conference on Systems, Man, and Cybernetics, Taipei, Taiwan, 8–11 October 2006; pp. 3241–3243.
- Maurer, U.; Smailagic, A.; Siewiorek, D.P.; Deisher, M. Activity recognition and monitoring using multiple sensors on different body positions. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks, Washington, DC, USA, 3–5 April 2006.
- Bidargaddi, N.; Sarela, A.; Klingbeil, L.; Karunanithi, M. Detecting walking activity in cardiac rehabilitation by using accelerometer. In Proceedings of the International Conference on Intelligent Sensors, Sensor Networks and Information, Melbourne, Australia, 3–6 December 2007; pp. 555–560.
- Ibrahim, R.; Ambikairajah, E. Time-frequency based features for classification of walking patterns. In Proceedings of the International Conference on Digital Signal Processing, Cardiff, Wales, UK, 1–4 July 2007; pp. 187–190.
- Lombriser, C.; Bharatula, N.B.; Roggen, D.; Tröster, G. On-body activity recognition in a dynamic sensor network. In Proceedings of the ICST 2nd international conference on Body area networks, Florence, Italy, 11–13 June 2007; pp. 1–6.
- Suutala, J.; Pirttikangas, S.; Röning, J. Discriminative temporal smoothing for activity recognition from wearable sensors. In Proceedings of the 4th International Symposium on Ubiquitous Computing Systems, Tokyo, Japan, 25–28 November 2007; pp. 182–195.
- Muscillo, R.; Conforto, S.; Schmid, M.; Caselli, P.; D’Alessio, T. Classification of motor activities through derivative dynamic time warping applied on accelerometer data. In Proceedings of the 29th Annual International Conference of IEEE-EMBS, Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007; pp. 4930–4933.
- Jafari, R.; Li, W.; Bajcsy, R.; Glaser, S.; Sastry, S. Physical activity monitoring for assisted living at home. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks, RWTH Aachen University, Germany, 26–28 March 2007; pp. 213–219.
- Al-ani, T.; Ba, Q.; Trang, L.; Monacelli, E. On-line automatic detection of human activity in home using wavelet and hidden markov models scilab toolkits. In Proceedings of the International Conference on Control Application, Singapore, 1–3 October 2007; pp. 485–490.
- Krishnan, N.C.; Colbry, D.; Juillard, C.; Panchanathan, S. Real time human activity recognition using tri-axial accelerometers. In Proceedings of the Sensors Signals and Information Processing Work shop, Sedona, AZ, USA, 11–14 May 2008.
- Zappi, P.; Lombriser, C.; Stiefmeier, T.; Farella, E.; Roggen, D.; Benini, L.; Tröster, G. Activity recognition from on-body sensors: Accuracy-power trade-off by dynamic sensor selection. In Wireless Sensor Networks; Verdone, R., Ed.; Springer Berlin Heidelberg: Berlin, Germany, 2008; pp. 17–33. [Google Scholar]
- He, Z.; Jin, L.; Zhen, L.; Huang, J. Gesture recognition based on 3D accelerometer for cell phones interaction. In Proceedings of the IEEE Asia Pacific Conference on Circuits and Systems, Macao, China, 30 November–3 December 2008; pp. 217–220.
- Wu, W.H.; Bui, A.T.; Batalin, M.A.; Au, L.K.; Binney, J.D.; Kaiser, W.J. MEDIC: Medical embedded device for individualized care. Artif. Intell. Med. 2008, 42, 137–152. [Google Scholar] [CrossRef] [PubMed]
- Choudhury, T.; Consolvo, S.; Harrison, B.; Hightower, J.; Lamarca, A.; LeGrand, L.; Rahimi, A.; Rea, A.; Bordello, G.; Hemingway, B.; et al. The mobile sensing platform: An embedded activity recognition system. IEEE Pervasive Comput. 2008, 7, 32–41. [Google Scholar] [CrossRef]
- Huynh, T.; Fritz, M.; Schiele, B. Discovery of Activity Patterns Using Topic Models. In Proceedings of the International conference on Ubiquitous computing, Seoul, Korea, 21–24 September 2008; ACM: New York, NY, USA, 2008; pp. 10–19. [Google Scholar]
- Krishnan, N.C.; Juillard, C.; Colbry, D.; Panchanathan, S. Recognition of hand movements using wearable accelerometers. J. Ambient Intell. Smart Environ. 2009, 1, 143–155. [Google Scholar]
- Susi, M.; Renaudin, V.; Lachapelle, G. Motion Mode Recognition and Step Detection Algorithms for Mobile Phone Users. Sensors 2013, 13, 1539–1562. [Google Scholar] [CrossRef] [PubMed]
- Ofstad, A.; Nicholas, E.; Szcodronski, R.; Choudhury, R.R. AAMPL: Accelerometer Augmented Mobile Phone Localization. In Proceedings of the 1st ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments, San Francisco, CA, USA, 14–19 September 2008; pp. 13–18.
- Albert, M.V.; Kording, K.; Herrmann, M.; Jayaraman, A. Fall classification by machine learning using mobile phones. PLoS ONE 2012, 7, e36556. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.M.; Lee, Y.K.; Lee, S.Y.; Kim, T.S. Human Activity Recognition via an Accelerometer-Enabled Smartphone Using Kernel Discriminant Analysis. In Proceedings of the 5th International Conference on Future Information Technology, Busan, Korea, 21–23 May 2010; pp. 1–6.
- Zhang, S.; McCullagh, P.; Nugent, C.; Zheng, H. Activity Monitoring Using a Smart Phone’s Accelerometer with Hierarchical Classification. In Proceedings of the 2010 Sixth International Conference on Intelligent Environments, Kuala Lumpur, Malaysia, 19–21 July 2010; pp. 158–163.
- Sun, L.; Zhang, D.; Li, B.; Guo, B.; Li, S. Activity recognition on an accelerometer embedded mobile phone with varying positions and orientations. In Proceedings of the 7th International Conference on Ubiquitous Intelligence and Computing, Xi’an, China, 26–29 October 2010.
- Saeedi, S.; El-Sheimy, N.; Sayed, A. Visual-Aided Context-Aware Framework for Personal Navigation Services. In Proceedings of the XXII International Society for Photogrammetry & Remote Sensing Congress, Melbourne, Australia, 25 August–1 September 2012.
- Shin, E.H.; El-Sheimy, N. A New Calibration Method for Strapdown Inertial Navigation Systems. Z. Vermess. J. 2002, 127, 1–10. [Google Scholar]
- Syed, Z. Accurate Personal Positioning using Inertial and GPS. In Proceedings of the ION GNSS 2009, Savanna, GA, USA, 22–25 September 2009.
- Zhao, X.; Goodal, C.; Syed, Z.; Wright, B.; El-Sheimy, N. Wi-Fi Assisted Multi-sensor Personal Navigation System for Indoor Environments. Available online: http://www.researchgate.net/profile/Naser_El-Sheimy/publication/267205163_Wi-Fi_Assisted_Multi-sensor_Personal_Navigation_System_for_Indoor_Environments/links/54cfbf6a0cf24601c0958d0b.pdf (accessed on 1 June 2005).
- Gouyon, F.; Pachet, F.; Delerue, O. Classifying Percussive Sounds: A Matter of Zero-Crossing Rate. In Proceedings of the COST G-6 Conference on Digital Audio Effects, Verona, Italy, 7–9 December 2000.
- Mizell, D. Using Gravity to Estimate Accelerometer Orientation. In Proceedings of the 7th IEEE International Symposium on Wearable Computers, ISWC’03, IEEE Computer Society, Washington, DC, USA, 21–23 October 2005; pp. 252–254.
- Mitchell, E.; Monaghan, D.; O’Connor, N. Classification of Sporting Activities Using Smartphone Accelerometers. Sensors 2013, 13, 5317–5337. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Alelyani, S.; Liu, H. Feature Selection for Classification: A Review. In Data Classification: Algorithms and Applications; Aggarwal, C.C., Ed.; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Witten, I.; Frank, E.; Trigg, L.; Hall, M.; Holmes, G.; Cunningham, S. Practical Machine Learning Tools and Techniques with Java Implementations. In Proceedings of the ICONIP/ANZIIS/ANNES Workshop on Emerging Knowledge Engineering and Connectionist-Based Information Systems, Dunedin, New Zealand, 22–23 November 1999; pp. 192–196.
- Quinlan, J.R. Improved use of continuous attributes in c4.5. J. Artifici. Intell. Res. 1996, 4, 77–90. [Google Scholar]
- Cheng, J.; Greiner, R. Comparing Bayesian Network Classifiers. In Proceedings of the Fifteenth Conference on Uncertainty in Artificial Intelligence, Stockholm, Sweden, 30 July–1 August 1999; pp. 101–108.
- Ramoni, M.F.; Sebastiani, P. Bayesian Methods in Intelligent Data Analysis. In Intelligent Data Analysis. An Introduction; Berthold, M., Hand, D.J., Eds.; Springer Verlag: New York, NY, USA, 2003; pp. 128–166. [Google Scholar]
- Rokach, L.; Maimon, O. Data Mining with Decision Trees: Theory and Applications; World Scientific Pub Co Inc.: Singapore, 2008; ISBN 978-9812771711. [Google Scholar]
- Mercier, G.; Lennon, M. Support Vector Machines for Hyperspectral Image Classification with Spectral-Based Kernels. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 288–290.
- Zhao, X.; Saeedi, S.; Sayed, Z.; Goodal, C.; El-Sheimy, N. Towards Arbitrary Placement of Multi-Sensors Assisted Mobile Navigation System. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010; pp. 556–564.
- Keogh, E.; Chu, S.; Hart, D.; Pazzani, M. An Online Algorithm for Segmenting Time Series. In Proceedings of the Data Mining, San Jose, CA, USA, 29 November–2 December 2001; pp. 289–296.
- Bouckaert, R.R. Bayesian Network Classifiers in Weka for Version 3-5-7; Waikato: University of Waikato, Hamilton, New Zealand, 2008. [Google Scholar]
- Ridgeway, G.; Madigan, D.; Richardson, T. Interpretable Boosted Naive Bayes Classification. Available online: http://www.aaai.org/Papers/KDD/1998/KDD98-015.pdf (accessed on 1 June 2005).
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeedi, S.; El-Sheimy, N. Activity Recognition Using Fusion of Low-Cost Sensors on a Smartphone for Mobile Navigation Application. Micromachines 2015, 6, 1100-1134. https://doi.org/10.3390/mi6081100
Saeedi S, El-Sheimy N. Activity Recognition Using Fusion of Low-Cost Sensors on a Smartphone for Mobile Navigation Application. Micromachines. 2015; 6(8):1100-1134. https://doi.org/10.3390/mi6081100
Chicago/Turabian StyleSaeedi, Sara, and Naser El-Sheimy. 2015. "Activity Recognition Using Fusion of Low-Cost Sensors on a Smartphone for Mobile Navigation Application" Micromachines 6, no. 8: 1100-1134. https://doi.org/10.3390/mi6081100
APA StyleSaeedi, S., & El-Sheimy, N. (2015). Activity Recognition Using Fusion of Low-Cost Sensors on a Smartphone for Mobile Navigation Application. Micromachines, 6(8), 1100-1134. https://doi.org/10.3390/mi6081100