

A Rotary Piezoelectric Electromagnetic Hybrid Energy Harvester

Abstract
1. Introduction
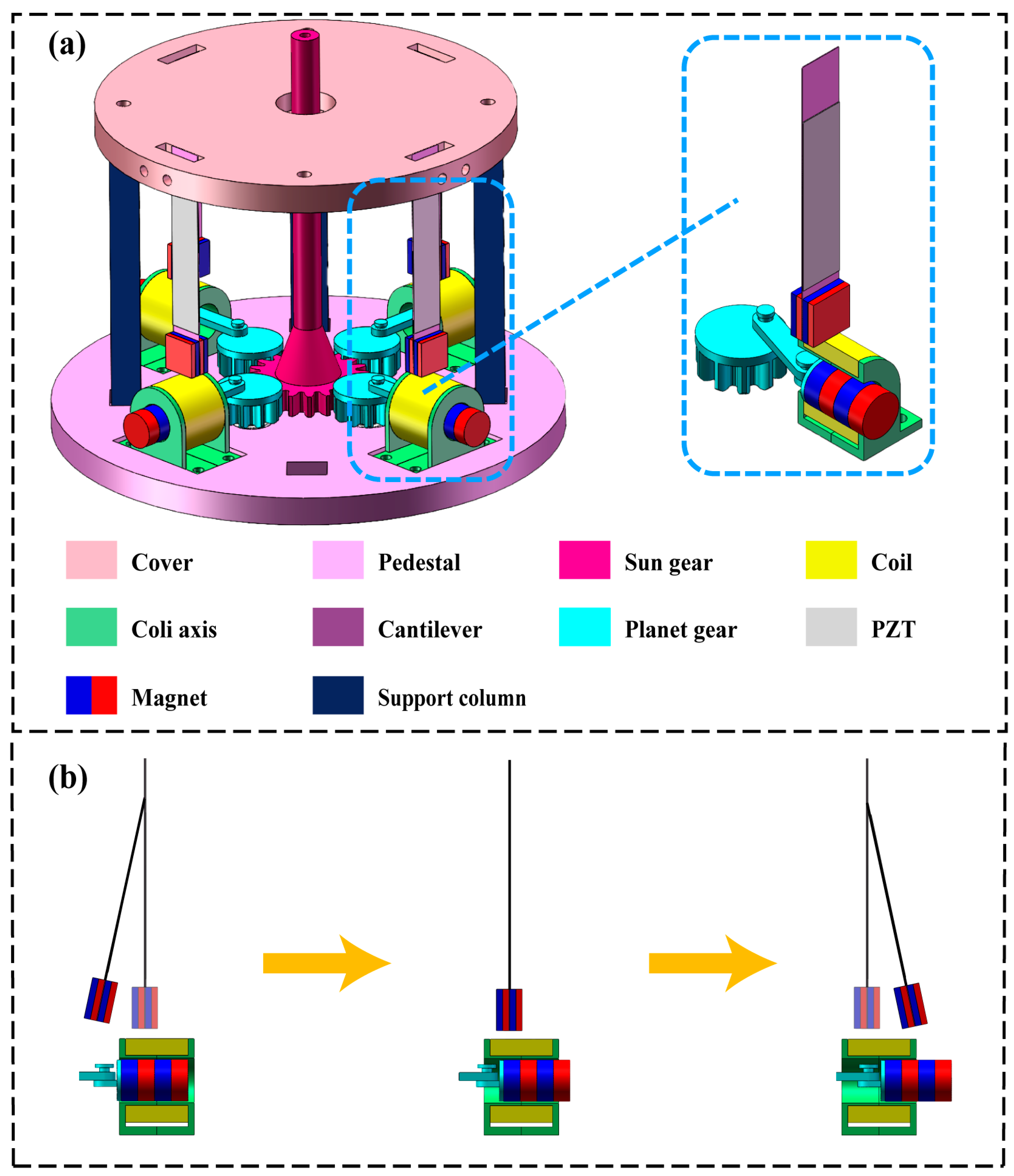
2. Design and Operating Principle
3. Modelling and Analysis
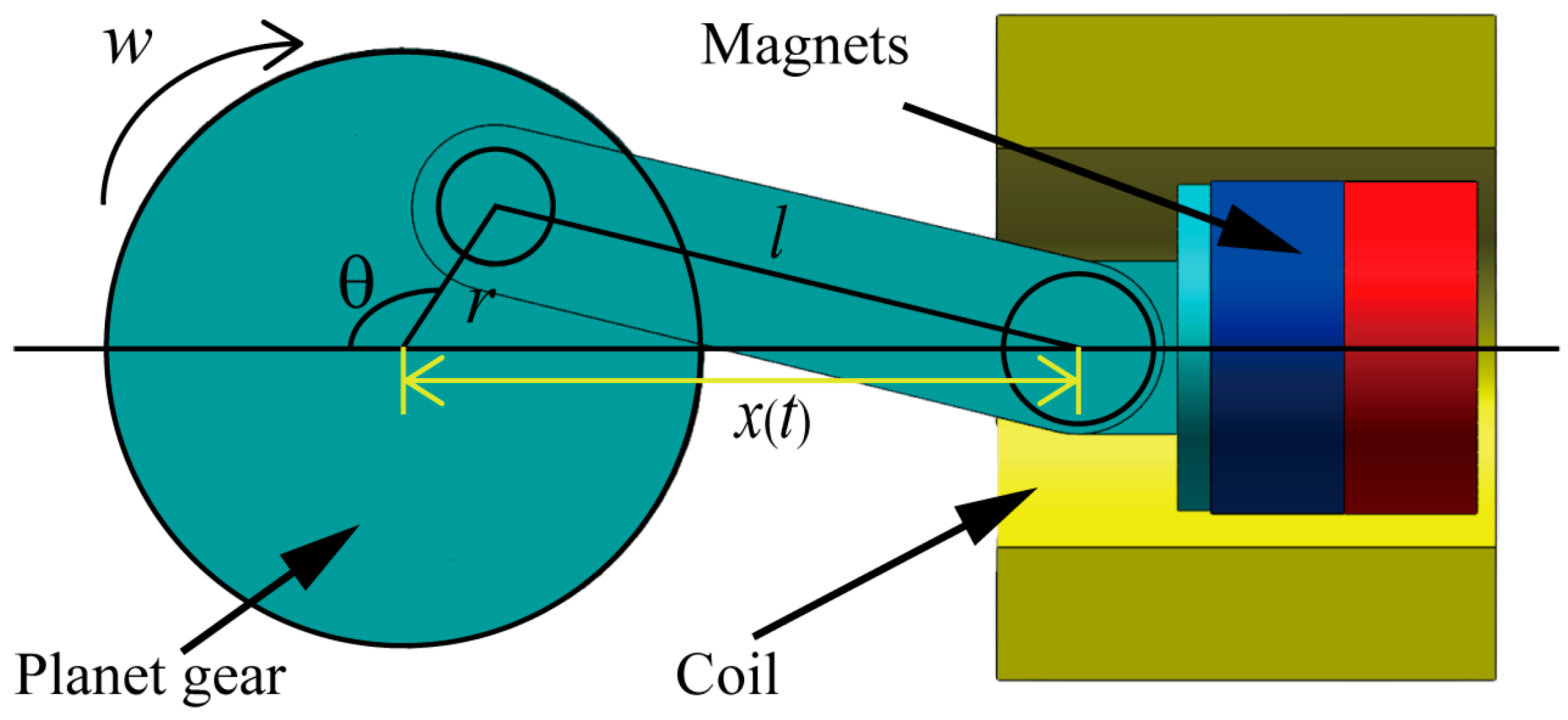
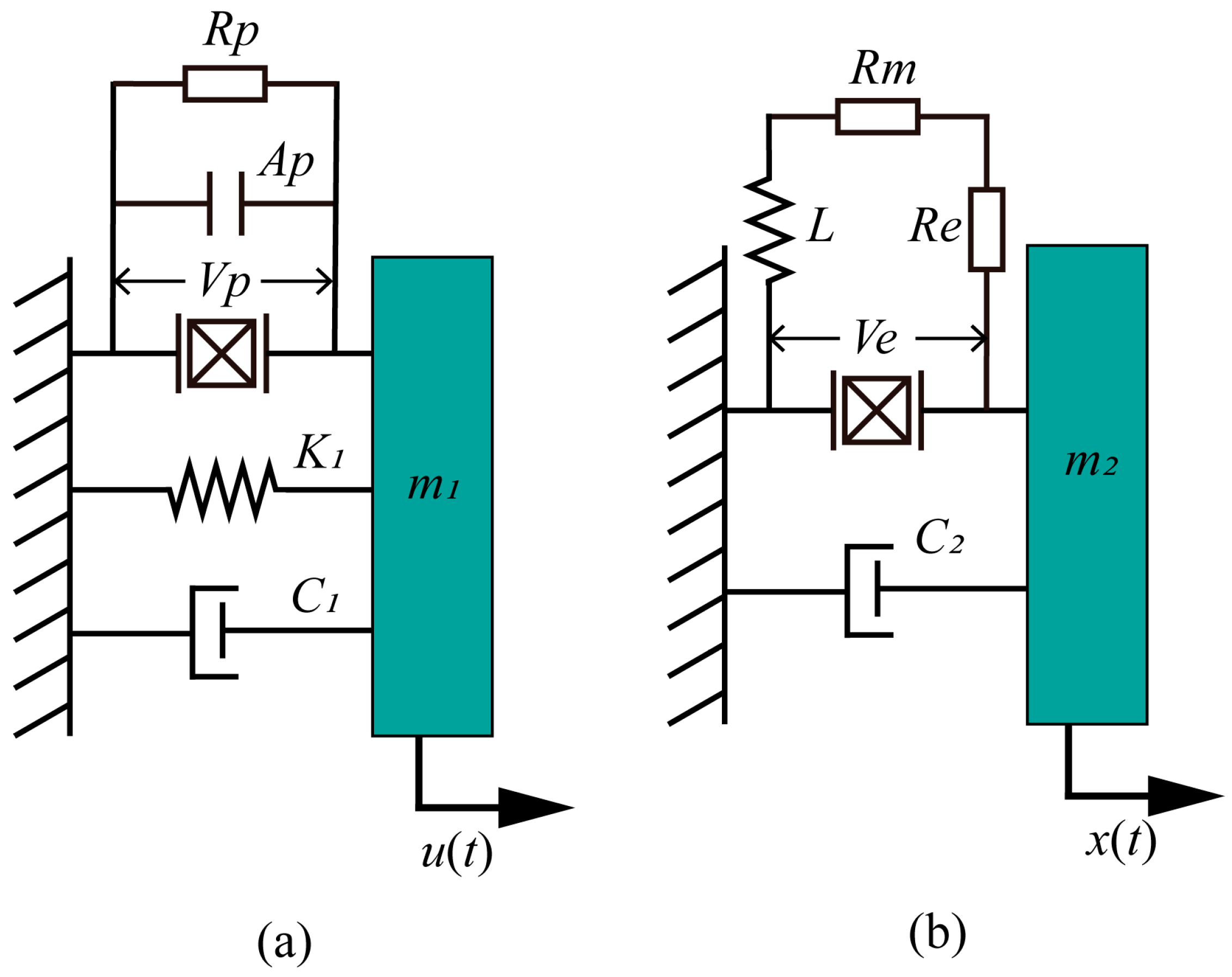
3.1. Theoretical Modeling
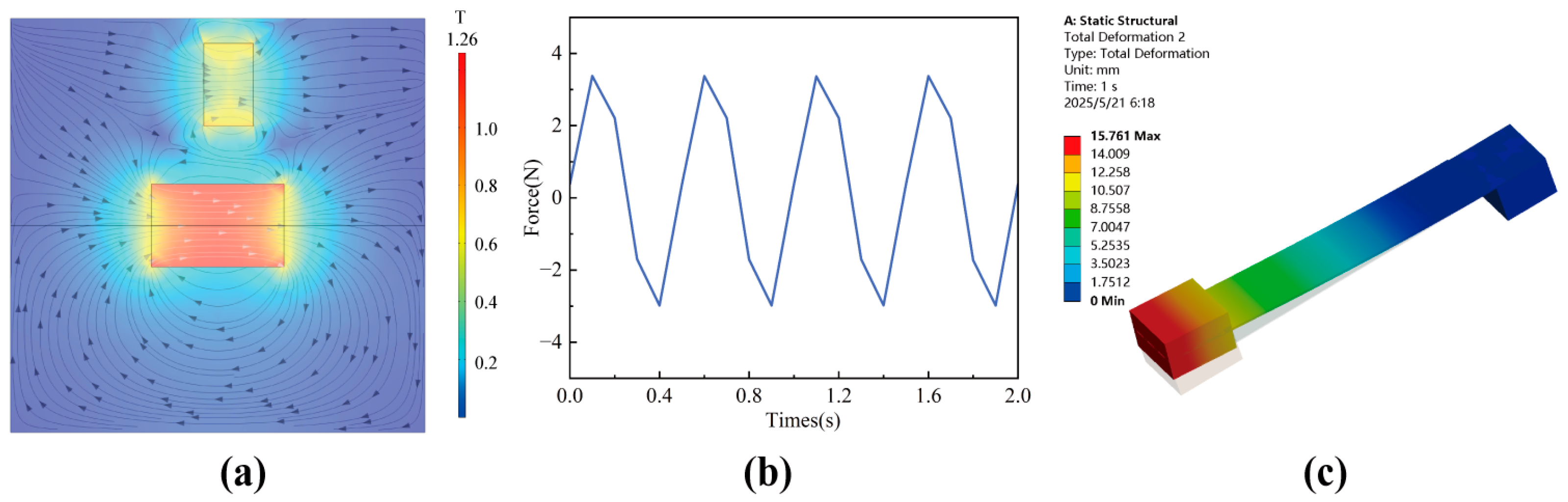
3.2. Simulation Analysis
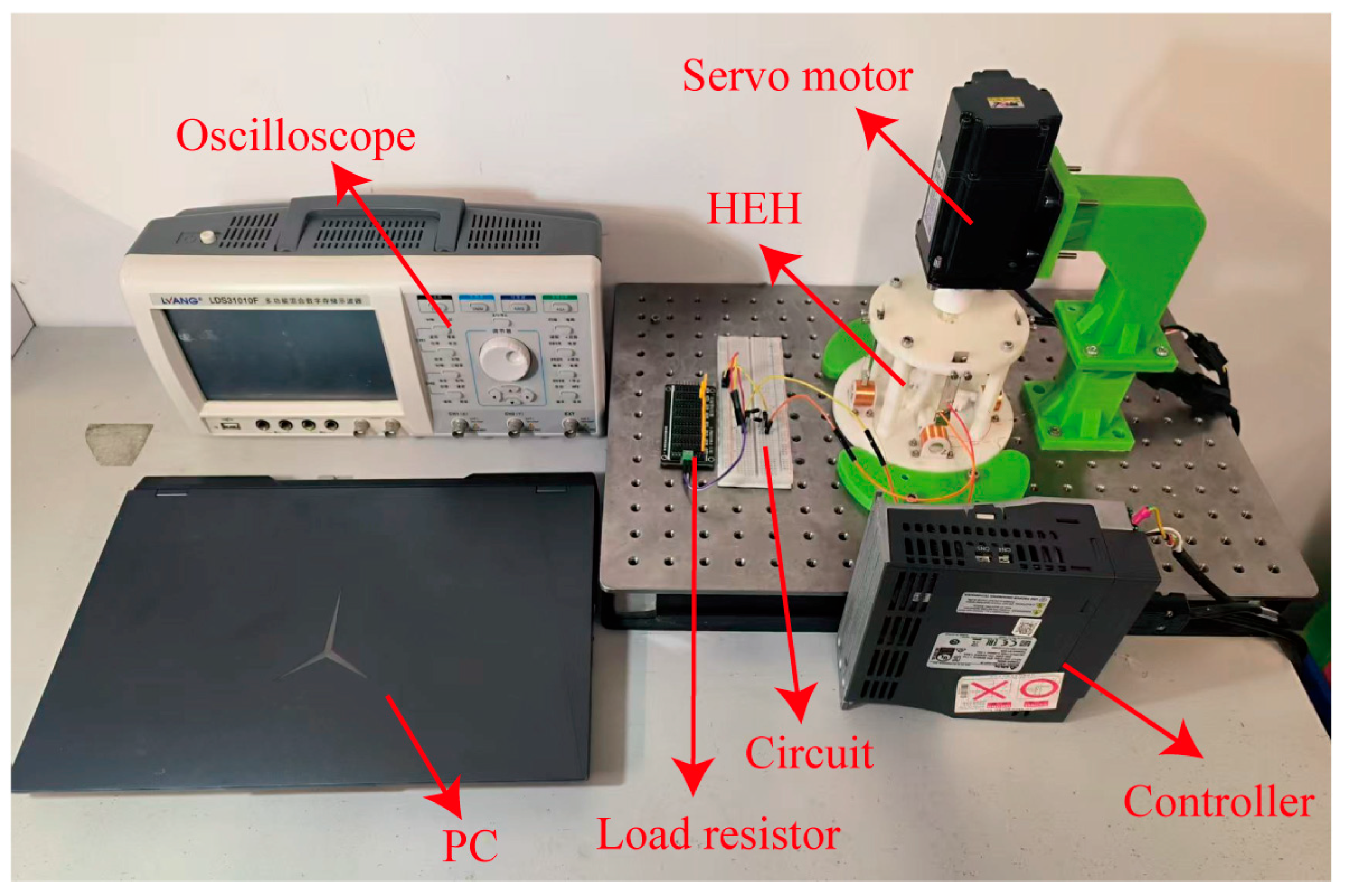
4. Experimental Results and Discussion
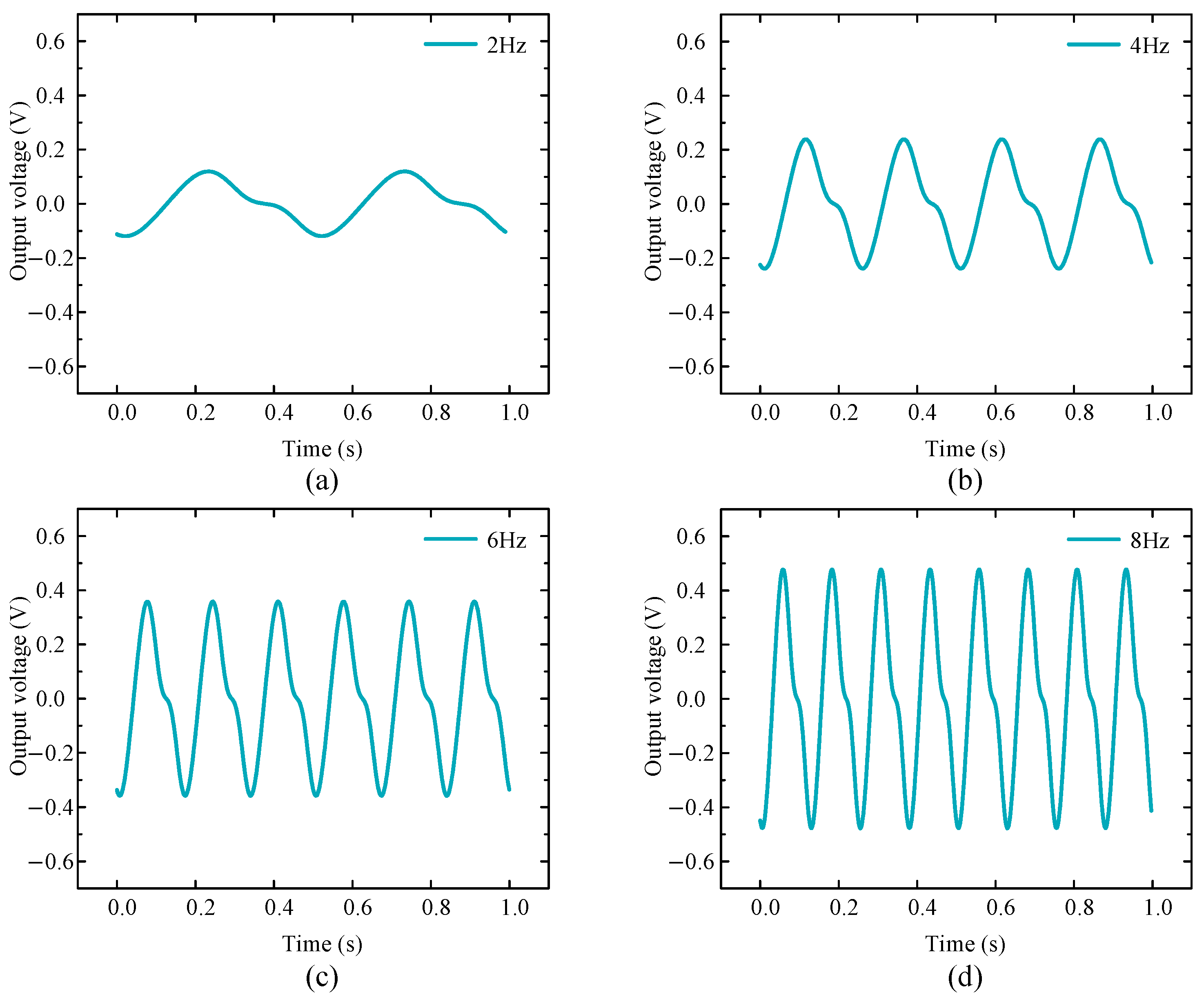
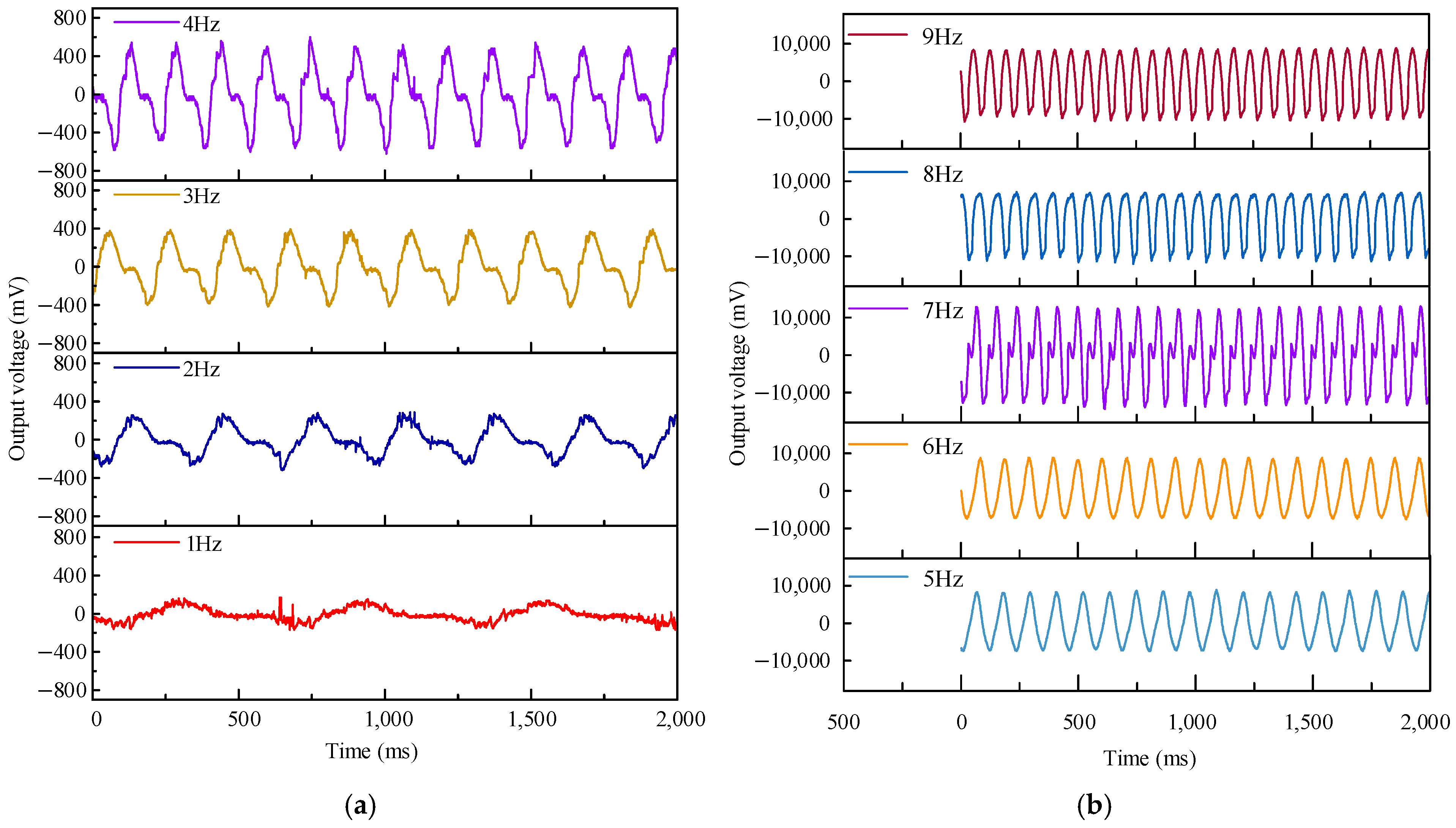
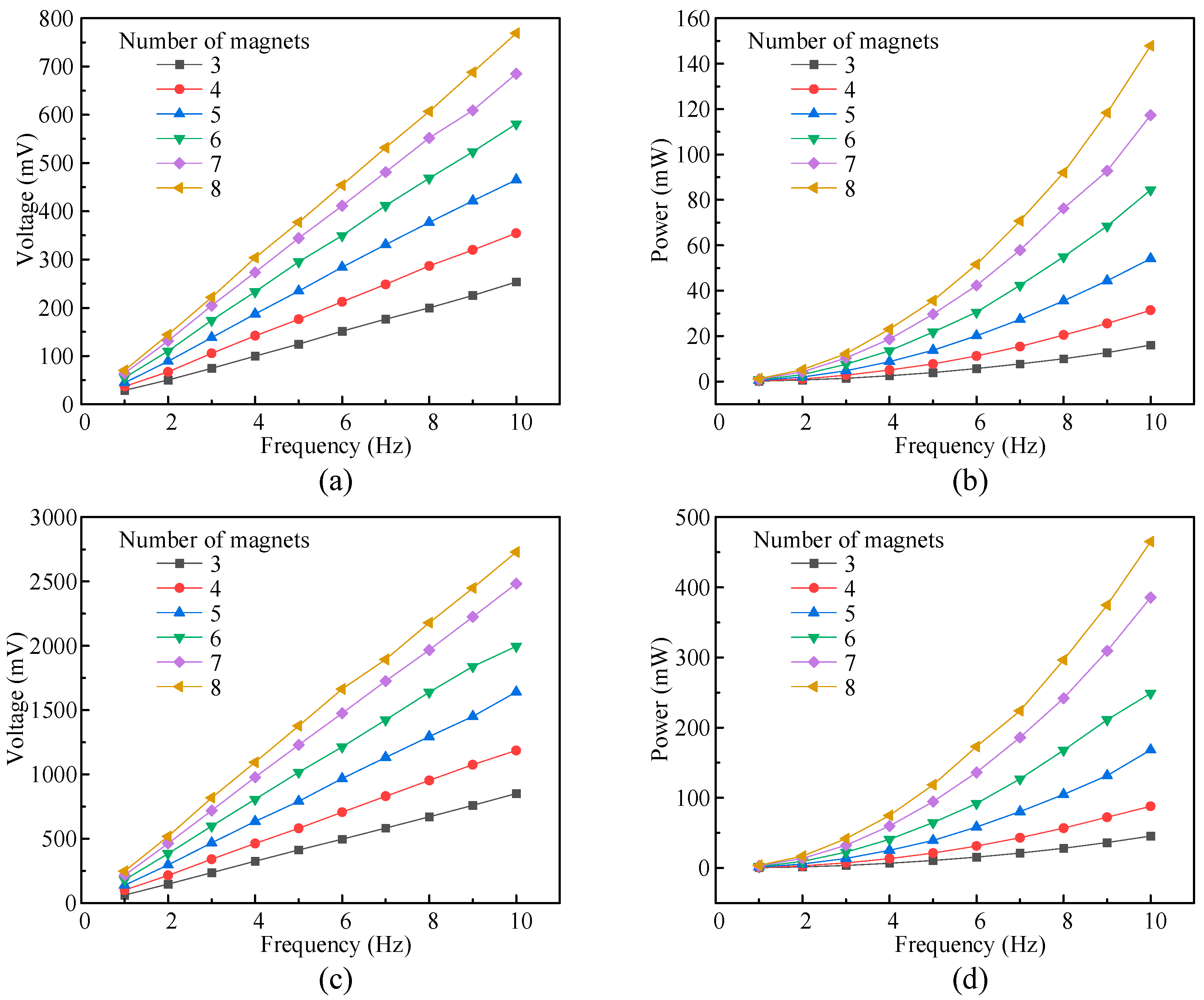
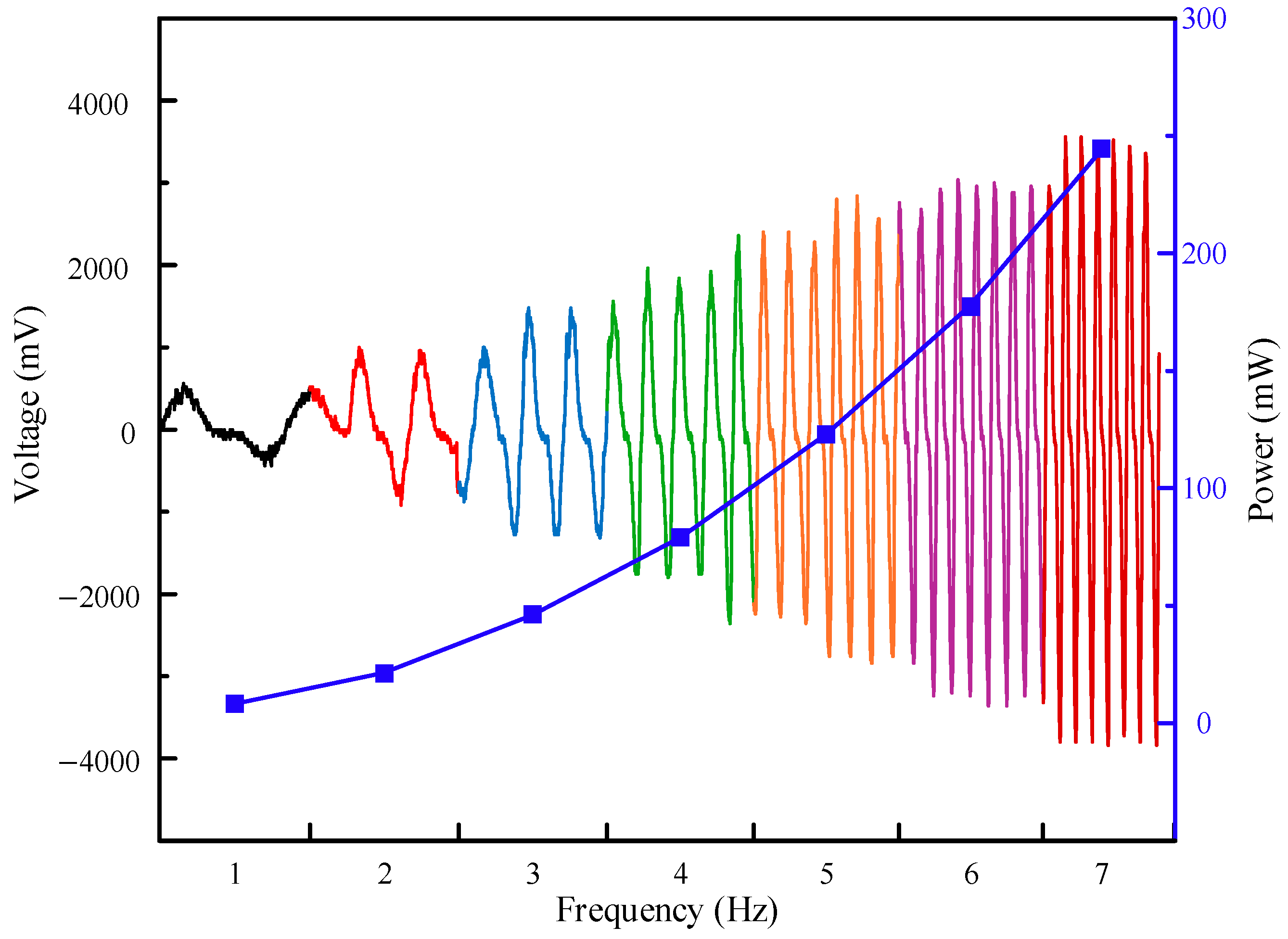
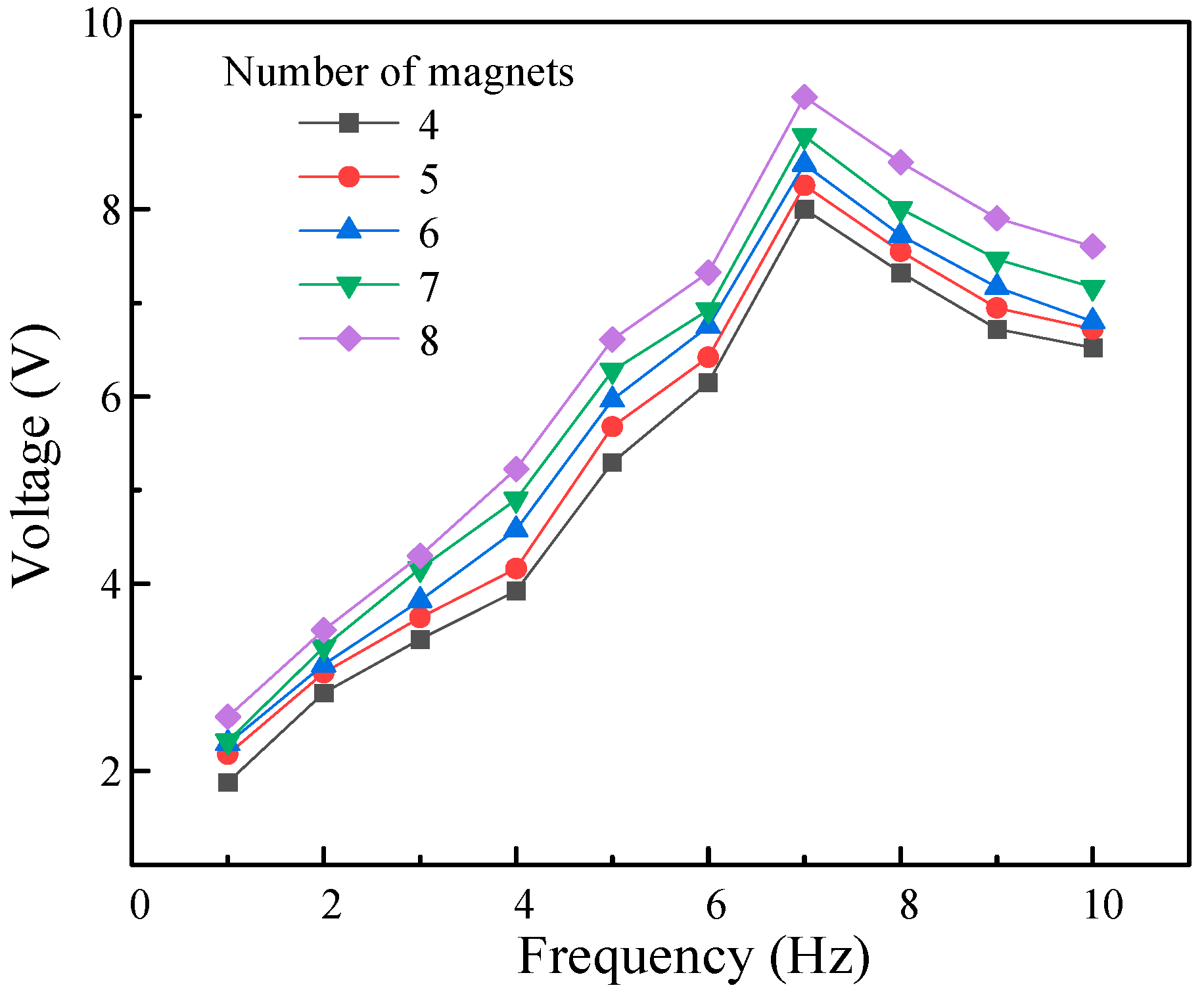
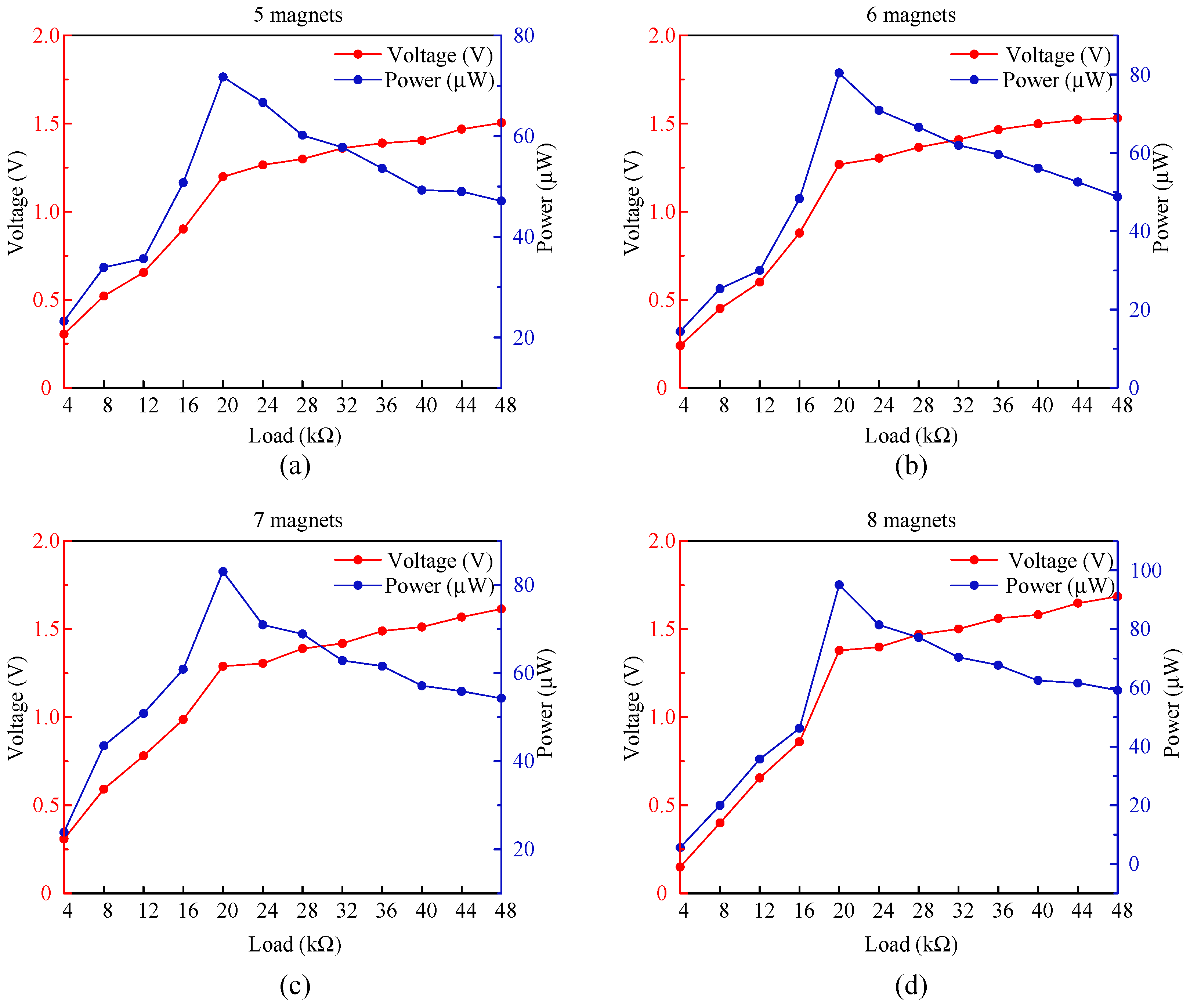
4.1. Output Characteristics Analysis
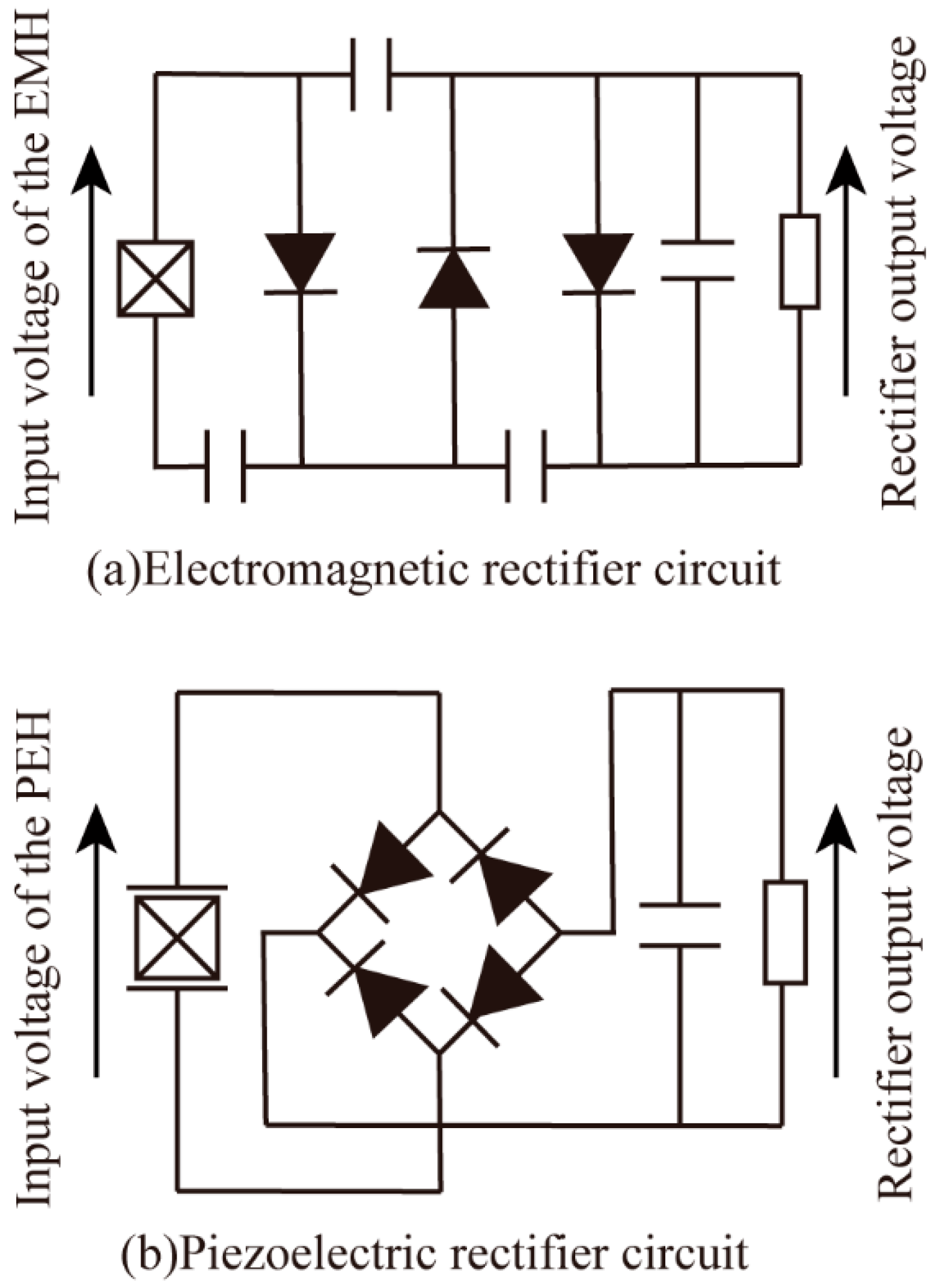
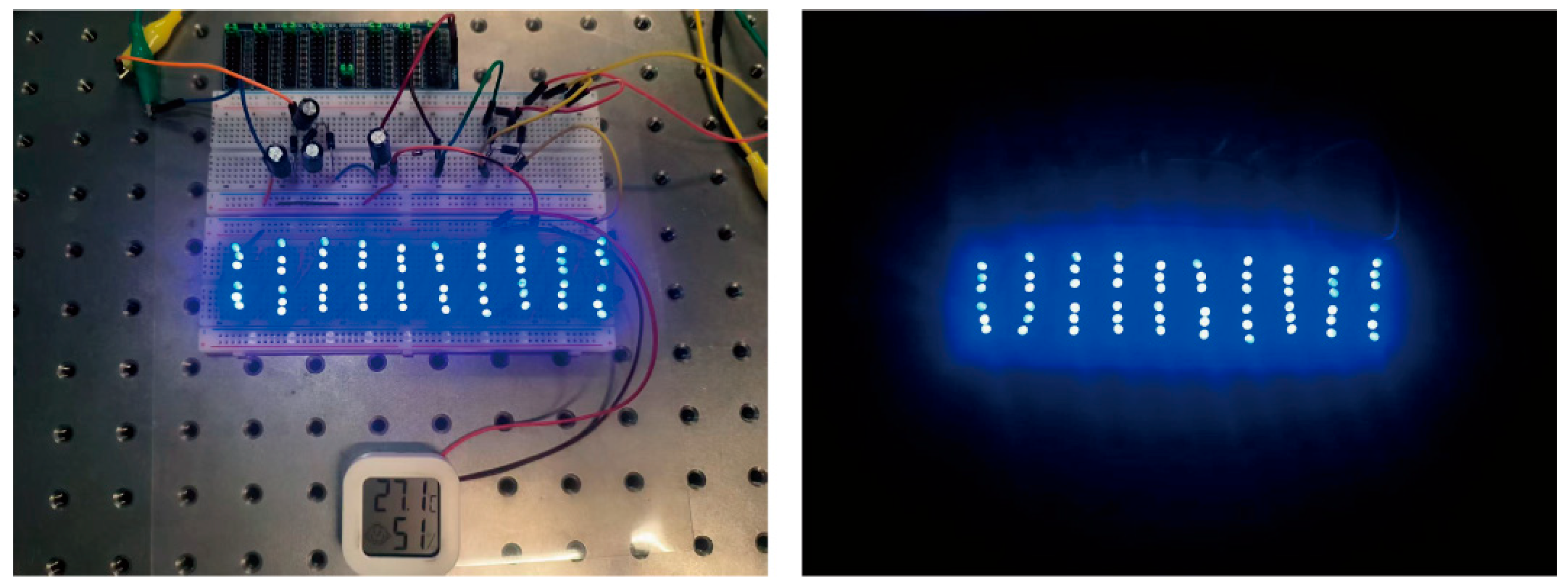
4.2. Application Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, L.; Fei, Z.; Duan, C.; Han, X.; Li, M.; Gao, W.; Xia, Y.; Jia, C.; Lin, Q.; Zhao, Y. Self-sustained and self-wakeup wireless vibration sensors by electromagnetic-piezoelectric-triboelectric hybrid energy harvesting. Appl. Energy 2024, 355, 122207. [Google Scholar] [CrossRef]
- Babayo, A.A.; Anisi, M.H.; Ali, I. A review on energy management schemes in energy harvesting wireless sensor networks. Renew. Sustain. Energy Rev. 2017, 76, 1176–1184. [Google Scholar] [CrossRef]
- Liu, H.; Fu, H.; Sun, L.; Lee, C.; Yeatman, E.M. Hybrid energy harvesting technology: From materials, structural design, system integration to applications. Renew. Sustain. Energy Rev. 2021, 137, 110473. [Google Scholar] [CrossRef]
- Mrozik, W.; Rajaeifar, M.A.; Heidrich, O.; Christensen, P. Environmental impacts, pollution sources and pathways of spent lithium-ion batteries. Energy Environ. Sci. 2021, 14, 6099–6121. [Google Scholar] [CrossRef]
- Hossain, M.I.; Zahid, M.S.; Chowdhury, M.A.; Hossain, M.M.M.; Hossain, N. MEMS-based energy harvesting devices for low-power applications—A review. Results Eng. 2023, 19, 101264. [Google Scholar] [CrossRef]
- He, L.; Han, Y.; Liu, R.; Hu, R.; Yu, G.; Cheng, G. Design and performance study of a rotating piezoelectric wind energy harvesting device with wind turbine structure. Energy 2022, 256, 124675. [Google Scholar] [CrossRef]
- Wang, G.; Song, R.; Luo, L.; Yu, P.; Yang, X.; Zhang, L. Multi-piezoelectric energy harvesters array based on wind-induced vibration: Design, simulation, and experimental evaluation. Energy 2024, 300, 131509. [Google Scholar] [CrossRef]
- Zhou, Z.; Cao, D.; Huang, H.; Qin, W.; Du, W.; Zhu, P. Biomimetic swallowtail V-shaped attachments for enhanced low-speed wind energy harvesting by a galloping piezoelectric energy harvester. Energy 2024, 304, 132063. [Google Scholar] [CrossRef]
- He, L.; Liu, R.; Liu, X.; Zheng, X.; Zhang, L.; Lin, J. A piezoelectric-electromagnetic hybrid energy harvester for low-frequency wave motion and self-sensing wave environment monitoring. Energy Convers. Manag. 2024, 300, 117920. [Google Scholar] [CrossRef]
- Du, X.; Li, P.; Li, Z.; Liu, X.; Wang, W.; Feng, Q.; Du, L.; Yu, H.; Wang, J.; Xie, X. Multi-pillar piezoelectric stack harvests ocean wave energy with oscillating float buoy. Energy 2024, 298, 131347. [Google Scholar] [CrossRef]
- Fan, K.; Liu, Z.; Liu, H.; Wang, L.; Zhu, Y.; Yu, B. Scavenging energy from human walking through a shoe-mounted piezoelectric harvester. Appl. Phys. Lett. 2017, 110, 143902. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, M.; Zhou, C.; Hu, Z.; Du, Z.; Fu, X.; Song, Y.; Jia, Y.; Wen, X.; Wang, J. Phase transformation enabled textile triboelectric nanogenerators for wearable energy harvesting and personal thermoregulation. Nano Energy 2024, 132, 110361. [Google Scholar] [CrossRef]
- Hao, Y.; Yang, J.; Niu, Z.; Wang, M.; Liu, H.; Qin, Y.; Zhang, C.; Li, X. High-output triboelectric nanogenerator based on L-cystine/nylon composite nanofiber for human bio-mechanical energy harvesting. Nano Energy 2023, 118, 108964. [Google Scholar] [CrossRef]
- Kuang, Z.; Zhang, Z.; Liao, W.; Lin, S.; Wang, K.; Zhang, J.; Kan, J. Magnetic transfer piezoelectric wind energy harvester with dual vibration mode conversion. Energy 2024, 308, 133020. [Google Scholar] [CrossRef]
- Shen, J.; Wan, S.; Fu, J.; Li, S.; Lv, D.; Dekemele, K. A magnetic plucking frequency up-conversion piezoelectric energy harvester with nonlinear energy sink structure. Appl. Energy 2024, 376, 124326. [Google Scholar] [CrossRef]
- Li, S.; Feng, Z.; He, X.; Ye, Y.; Li, J. An in-plane omnidirectional flutter piezoelectric wind energy harvester. Mech. Syst. Signal Process. 2023, 200, 110637. [Google Scholar] [CrossRef]
- Wang, S.; Miao, G.; Zhou, S.; Yang, Z.; Yurchenko, D. A novel electromagnetic energy harvester based on the bending of the sole. Appl. Energy 2022, 314, 119000. [Google Scholar] [CrossRef]
- Miao, G.; Fang, S.; Wang, S.; Zhou, S. A low-frequency rotational electromagnetic energy harvester using a magnetic plucking mechanism. Appl. Energy 2022, 305, 117838. [Google Scholar] [CrossRef]
- Zhang, T.; Kong, L.; Zhu, Z.; Wu, X.; Li, H.; Zhang, Z.; Yan, J. An electromagnetic vibration energy harvesting system based on series coupling input mechanism for freight railroads. Appl. Energy 2024, 353, 122047. [Google Scholar] [CrossRef]
- Zhao, C.; Hu, G.; Li, X.; Liu, Z.; Yuan, W.; Yang, Y. Wide-bandwidth triboelectric energy harvester combining impact nonlinearity and multi-resonance method. Appl. Energy 2023, 348, 121530. [Google Scholar] [CrossRef]
- Pang, Y.; Zhu, X.; Jin, Y.; Yang, Z.; Liu, S.; Shen, L.; Li, X.; Lee, C. Textile-inspired triboelectric nanogenerator as intelligent pavement energy harvester and self-powered skid resistance sensor. Appl. Energy 2023, 348, 121515. [Google Scholar] [CrossRef]
- Li, W.; Wan, L.; Lin, Y.; Liu, G.; Qu, H.; Wen, H.; Ding, J.; Ning, H.; Yao, H. Synchronous nanogenerator with intermittent sliding friction self-excitation for water wave energy harvesting. Nano Energy 2022, 95, 106994. [Google Scholar] [CrossRef]
- Liao, W.; Su, X.; Fang, F. A centrifugal spring mechanism empowers self-adjusting in piezoelectric wind energy harvesting. Nano Energy 2025, 133, 110462. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, Z.; Fan, Z.; Fan, D.; Jiang, F.; Hu, X. A novel multi-degree of freedom kinetic energy harvester for self-powered low-power applications in ships. Energy Convers. Manag. 2024, 302, 118096. [Google Scholar] [CrossRef]
- Yin, P.; Tang, L.; Li, Z.; Xia, C.; Li, Z.; Aw, K.C. Harnessing ultra-low-frequency vibration energy by a rolling-swing electromagnetic energy harvester with counter-rotations. Appl. Energy 2025, 377, 124507. [Google Scholar] [CrossRef]
- Chen, W.; He, Z.; Zhao, J.; Mo, J.; Ouyang, H. Hybrid triboelectric-piezoelectric energy harvesting via a bistable swing-impact structure with a tuneable potential barrier and frequency-up conversion effects. Appl. Energy 2024, 375, 124123. [Google Scholar] [CrossRef]
- Du, X.; Han, Y.; Guo, D.; Wang, W.; Liu, X.; Wang, S.; Yu, H.; Wang, J.; Tang, L.; Aw, K.C. Hybrid piezo-triboelectric wind energy harvesting mechanism with flag-dragging the cantilever beam vibration. Nano Energy 2024, 131, 110274. [Google Scholar] [CrossRef]
- Du, X.; Chen, H.; Li, C.; Li, Z.; Wang, W.; Guo, D.; Yu, H.; Wang, J.; Tang, L. Wake galloping piezoelectric-electromagnetic hybrid ocean wave energy harvesting with oscillating water column. Appl. Energy 2024, 353, 122081. [Google Scholar] [CrossRef]
- Peng, W.; Ni, Q.; Zhu, R.; Fu, X.; Zhu, X.; Zhang, C.; Liao, L. Triboelectric-electromagnetic hybrid wind energy harvesting and multifunctional sensing device for self-powered smart agricultural monitoring. Nano Energy 2024, 131, 110272. [Google Scholar] [CrossRef]
- Qu, Z.; Wang, X.P.; Huang, M.K.; Chen, C.X.; An, Y.; Yin, W.; Li, X. An eccentric-structured hybrid triboelectric-electromagnetic nanogenerator for low-frequency mechanical energy harvesting. Nano Energy 2023, 107, 108094. [Google Scholar] [CrossRef]
- Wang, C.; Chai, H.; Li, G.; Wang, W.; Tian, R.; Wen, G.L.; Wang, C.H.; Lai, S.K. Boosting biomechanical and wave energy harvesting efficiency through a novel triple hybridization of piezoelectric, electromagnetic, and triboelectric generators. Appl. Energy 2024, 374, 123876. [Google Scholar] [CrossRef]
- Zhao, L.C.; Zou, H.X.; Xie, X.; Guo, D.H.; Gao, Q.H.; Wu, Z.Y.; Yan, G.; Wei, K.X.; Zhang, W.M. Mechanical intelligent wave energy harvesting and self-powered marine environment monitoring. Nano Energy 2023, 108, 108222. [Google Scholar] [CrossRef]
- Bai, Q.; Gan, C.Z.; Zhou, T.; Du, Z.C.; Wang, J.H.; Wang, Q.; Wei, K.X.; Zou, H.X. A triboelectric-piezoelectric-electromagnetic hybrid wind energy harvester based on a snap-through bistable mechanism. Energy Convers. Manag. 2024, 306, 118323. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Z.; Gao, Z.; Gao, W.; Liu, M.J.; Gu, B.; Guo, J.; Chueh, Y.L. High-performance triboelectric-electromagnetic hybrid nanogenerator using dual-functional flexible neodymium iron boron/ethyl cellulose (NdFeB/EC) composite films for wind energy scavenging. Chem. Eng. J. 2024, 489, 150763. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Dimensions of the PZT | 40 × 10 × 0.2 mm3 |
| Dimensions of the cantilever | 60 × 10 × 0.2 mm3 |
| Dimensions of the square magnet | 10 × 10 × 3 mm3 |
| Dimensions of the circular magnet | 52π × 2 mm3 |
| Dimensions of the cover | 572π × 8 mm3 |
| Dimensions of the pedestal | 702π × 8 mm3 |
| Inner, outer, and height of the coil | 12 mm, 20 mm, 15 mm |
| Wire diameters of the coil | 0.35 mm |
| Turns of the coil | 432 |
| Impedance of the coil | 4Ω |
| Module of the sun gear and planet gear | 1.5 |
| Number of teeth of the sun gear | 20 |
| Description | Material |
|---|---|
| PZT | PZT-5H |
| Cantilever | 301 stainless steel |
| Square magnet | NdFeB 35 |
| Circular magnet | NdFeB 52 |
| Coil | Copper |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Z.; Li, C. A Rotary Piezoelectric Electromagnetic Hybrid Energy Harvester. Micromachines 2025, 16, 807. https://doi.org/10.3390/mi16070807
Yao Z, Li C. A Rotary Piezoelectric Electromagnetic Hybrid Energy Harvester. Micromachines. 2025; 16(7):807. https://doi.org/10.3390/mi16070807
Chicago/Turabian StyleYao, Zhiyang, and Chong Li. 2025. "A Rotary Piezoelectric Electromagnetic Hybrid Energy Harvester" Micromachines 16, no. 7: 807. https://doi.org/10.3390/mi16070807
APA StyleYao, Z., & Li, C. (2025). A Rotary Piezoelectric Electromagnetic Hybrid Energy Harvester. Micromachines, 16(7), 807. https://doi.org/10.3390/mi16070807