
Design and Optimization of a Tapered Magnetic Soft Continuum Robot for Enhanced Navigation in Cerebral Vasculature


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Preparation of Magnetic Composite Material
2.2. Magnetic Characterization
2.3. Mechanical Testing
2.4. Blood Vessel Model
2.5. Three-Dimensional Helmholtz Coils
2.6. Magnetic Actuation Model for Permanent Magnets
2.7. Cell Viability Assessment Method
3. Results
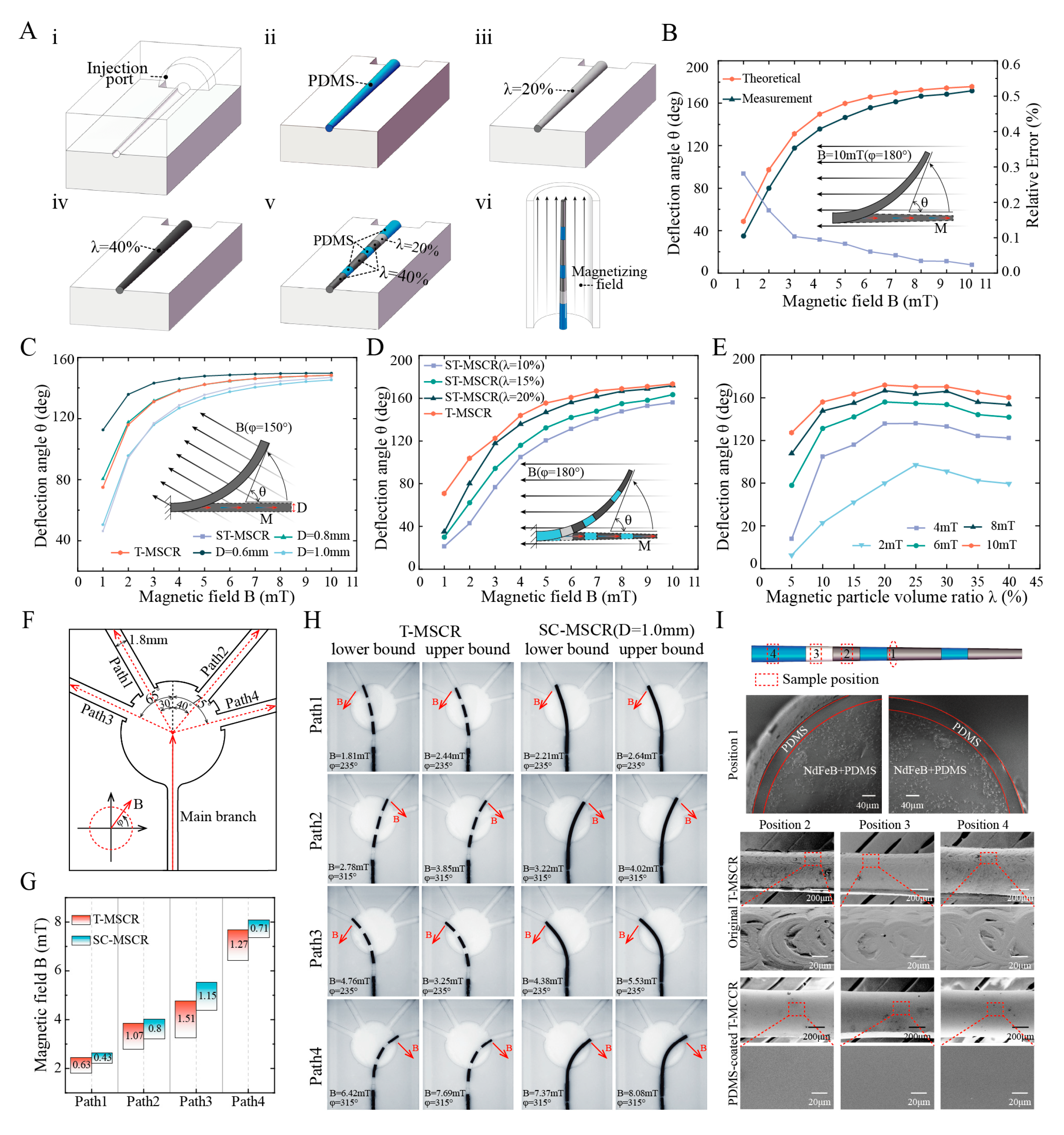
3.1. Hard Magnetic Elastic Line Theory and the Finite Difference Method
3.2. Materials and Structure of T-MSCR
3.3. Optimization of the T-MSCR
3.4. Fabrication and Properties of T-MSCR
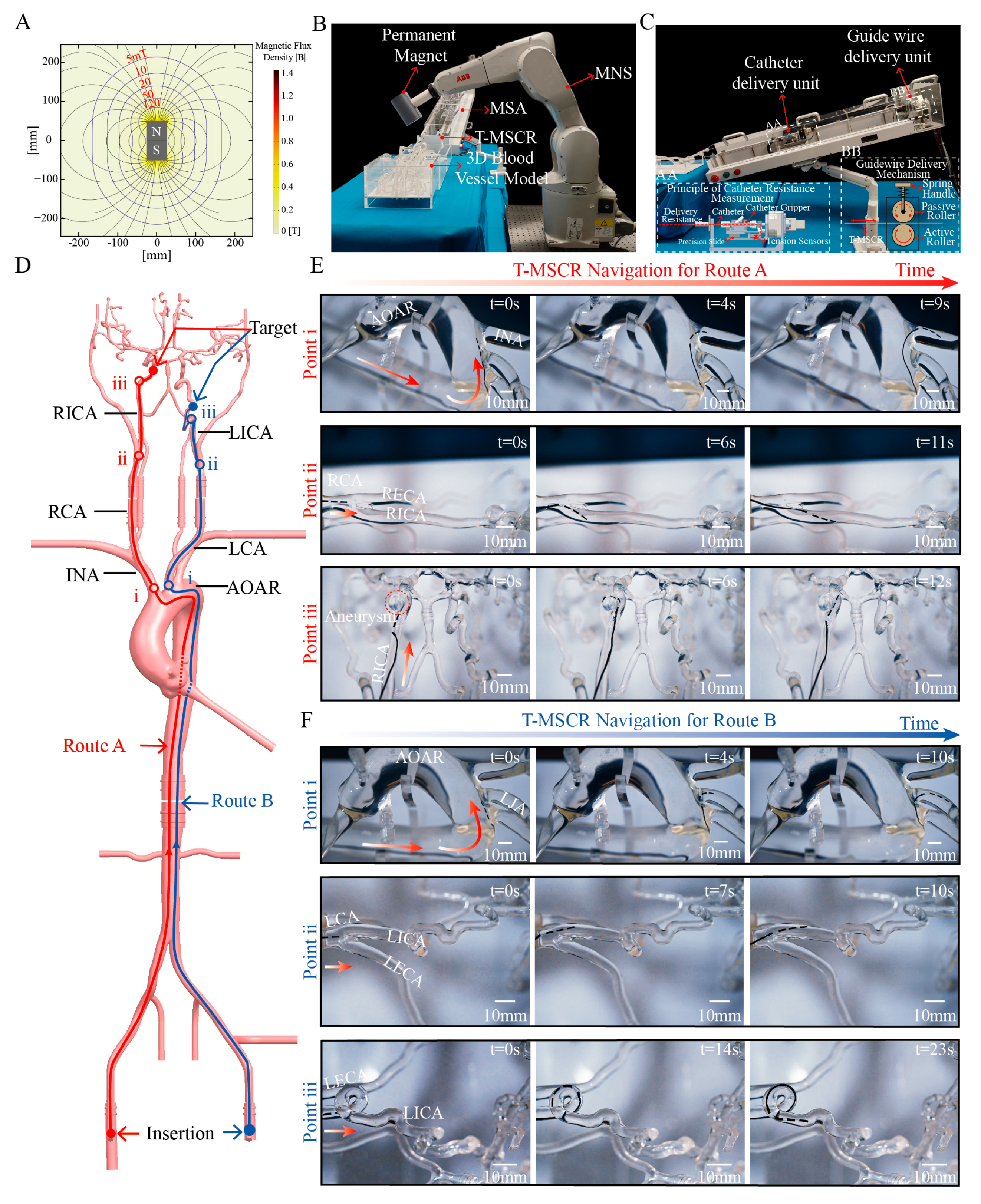
3.5. Magnetic Steering and Selective Navigation of T-MSCR In Vitro
3.6. In Vitro Navigation Within Human Vascular Model
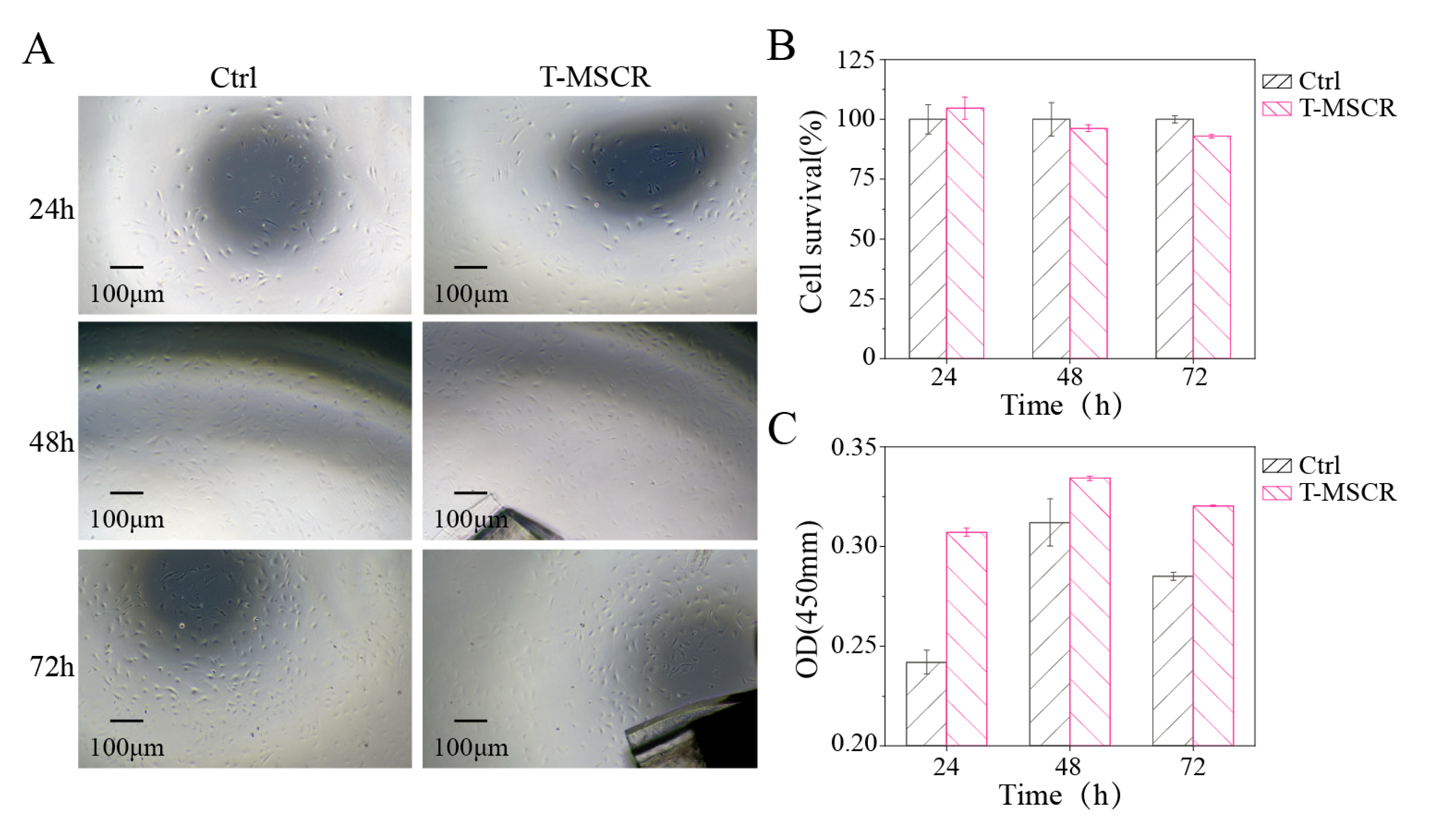
3.7. Biosafety of T-MSCR
4. Discussion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MSCR | Magnetic soft continuum robot |
| T-MSCR | Tapered MSCR |
| GWO | Gray Wolf Optimizer |
| DGWO | Discrete GWO |
| MDGIS | Magnetic-driven guidewire interventional systems |
| MNS | Magnetic navigation system |
| MSA | Master-slave advancer |
| SC-MSCR | Single-concentration cylindrical MSCR |
| ST-MSCR | Single-concentration tapered MSCR |
| PDMS | Polydimethylsiloxane |
| HUVEC | Human umbilical vein endothelial cells |
| GA | Genetic Algorithm |
| DPSO | Discrete Particle Swarm Optimization |
| SEM | Scanning electron microscope |
| CFA | Common femoral artery |
| AOAR | Aortic arch |
| RICA | Right internal carotid artery |
| LICA | Left internal carotid artery |
| RCFA | Right common femoral artery |
| INA | Innominate artery |
| RCA | Right carotid artery |
| LCFA | Left common femoral artery |
| LCA | Left carotid artery |
References
- Hu, Y.; Zhao, Y.; Li, P.; Lu, H.; Li, H.; Ge, J. Hypoxia and panvascular diseases: Exploring the role of hypoxia-inducible factors in vascular smooth muscle cells under panvascular pathologies. Sci. Bull. 2023, 68, 1954–1974. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Xu, X.-D.; Liang, Y.; Xu, T.; Shao, F.-R.; Zhu, L.; Ren, K. Research trends and hotspots of exercise therapy in Panvascular disease: A bibliometric analysis. Medicine 2023, 102, e35879. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Yu, L.; Zhao, Y.; Ge, J. Panvascular medicine: An emerging discipline focusing on atherosclerotic diseases. Eur. Heart J. 2022, 43, 4528–4531. [Google Scholar] [CrossRef] [PubMed]
- Jacquemyn, X.; Strom, J.B.; Strange, G.; Playford, D.; Stewart, S.; Kutty, S.; Bhatt, D.L.; Bleiziffer, S.; Grubb, K.J.; Pellikka, P.A.; et al. Moderate Aortic Valve Stenosis Is Associated with Increased Mortality Rate and Lifetime Loss: Systematic Review and Meta-Analysis of Reconstructed Time-to-Event Data of 409 680 Patients. J. Am. Heart Assoc. 2024, 13, e033872. [Google Scholar] [CrossRef]
- Pu, L.; Wang, L.; Zhang, R.; Zhao, T.; Jiang, Y.; Han, L. Projected Global Trends in Ischemic Stroke Incidence, Deaths and Disability-Adjusted Life Years From 2020 to 2030. Stroke 2023, 54, 1330–1339. [Google Scholar] [CrossRef]
- Silva, M.A.; Chen, S.; Starke, R.M. Unruptured cerebral aneurysm risk stratification: Background, current research, and future directions in aneurysm assessment. Surg. Neurol. Int. 2022, 13, 182. [Google Scholar] [CrossRef]
- Ge, Z.; Li, J. Application of Ultrasonic Intervention in the Treatment of Vascular Diseases. Med. J. Peking Union Med. Coll. Hosp. 2020, 11, 62–67. [Google Scholar]
- Scollan, M.E.; Azimov, N.; Garzon, M.C.; Tulin-Silver, S. An overview of interventional radiology techniques for the diagnosis and management of vascular anomalies: Part 1. Pediatr. Dermatol. 2023, 40, 242–249. [Google Scholar] [CrossRef]
- Vogl, T.J.; Bodelle, B. Vascular Interventional Therapy. In Diagnostic and Interventional Radiology; Vogl, T.J., Reith, W., Rummeny, E.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 707–721. [Google Scholar]
- Gunduz, S.; Albadawi, H.; Oklu, R. Robotic Devices for Minimally Invasive Endovascular Interventions: A New Dawn for Interventional Radiology. Adv. Intell. Syst. 2021, 3, 2000181. [Google Scholar] [CrossRef]
- Hirai, T.; Conway, B.D.; Paul, J.; Klass, D.; Blair, J.; Nathan, S. Frontiers in Transradial Catheterization and Intervention: Challenges and Advances in the “New Gold Standard” for Vascular Access. Curr. Cardiovasc. Risk Rep. 2017, 11, 37. [Google Scholar] [CrossRef]
- Hwang, J.; Kim, J.-Y.; Choi, H. A review of magnetic actuation systems and magnetically actuated guidewire- and catheter-based microrobots for vascular interventions. Intell. Serv. Robot. 2020, 13, 1–14. [Google Scholar] [CrossRef]
- Dreyfus, R.; Boehler, Q.; Lyttle, S.; Gruber, P.; Lussi, J.; Chautems, C.; Gervasoni, S.; Berberat, J.; Seibold, D.; Ochsenbein-Kölble, N.; et al. Dexterous helical magnetic robot for improved endovascular access. Sci. Robot. 2024, 9, eadh0298. [Google Scholar] [CrossRef] [PubMed]
- Hwang, J.; Jeon, S.; Kim, B.; Kim, J.-Y.; Jin, C.; Yeon, A.; Yi, B.-J.; Yoon, C.-H.; Park, H.-J.; Pané, S.; et al. An Electromagnetically Controllable Microrobotic Interventional System for Targeted, Real-Time Cardiovascular Intervention. Adv. Healthc. Mater. 2022, 11, 2102529. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Genevriere, E.; Harker, P.; Choe, J.; Balicki, M.; Regenhardt, R.W.; Vranic, J.E.; Dmytriw, A.A.; Patel, A.B.; Zhao, X. Telerobotic neurovascular interventions with magnetic manipulation. Sci. Robot. 2022, 7, eabg9907. [Google Scholar] [CrossRef]
- Kong, T.; Zheng, Q.; Sun, J.; Wang, C.; Liu, H.; Gao, Z.; Qiao, Z.; Yang, W. Advances in Magnetically Controlled Medical Robotics: A Review of Actuation Systems, Continuum Designs, and Clinical Prospects for Minimally Invasive Therapies. Micromachines 2025, 16, 561. [Google Scholar] [CrossRef]
- Shah, S.; Sheth, P.; Shah, R.; Shekhaliya, D.; Shah, M. The evolution of brain surgery: Exploring the impact of continuum robotics. Brain Hemorrhages 2024, 6, 38–56. [Google Scholar] [CrossRef]
- Chien, J.L.; Leong, C.; Liu, J.M.; Foong, S. Design and control of an aerial-ground tethered tendon-driven continuum robot with hybrid routing. Robot. Auton. Syst. 2023, 161, 104344. [Google Scholar] [CrossRef]
- Giannaccini, M.E.; Xiang, C.; Atyabi, A.; Theodoridis, T.; Nefti-Meziani, S.; Davis, S. Novel Design of a Soft Lightweight Pneumatic Continuum Robot Arm with Decoupled Variable Stiffness and Positioning. Soft Robot. 2017, 5, 54–70. [Google Scholar] [CrossRef]
- Gu, H.Y.; Gao, H.B.; Wei, C.; Huang, Z.R. A dexterous motion control method of rope driven snake manipulator considering the rope-hole properties. Mech. Mach. Theory 2023, 183, 105219. [Google Scholar] [CrossRef]
- Lin, D.; Chen, W.; He, K.; Jiao, N.; Wang, Z.; Liu, L. Position and Orientation Control of Multisection Magnetic Soft Microcatheters. IEEE-ASME Trans. Mechatron. 2023, 28, 907–918. [Google Scholar] [CrossRef]
- Peng, W.; Xie, H.; Zhang, S.; Gu, L. Inverse kinematic analysis and agile control of a magnetically actuated catheter. Robot. Comput.-Integr. Manuf. 2024, 86, 102662. [Google Scholar] [CrossRef]
- Tiryaki, M.E.; Elmacıoğlu, Y.G.; Sitti, M. Magnetic guidewire steering at ultrahigh magnetic fields. Sci. Adv. 2023, 9, eadg6438. [Google Scholar] [CrossRef]
- Kim, Y.; Parada, G.A.; Liu, S.; Zhao, X. Ferromagnetic soft continuum robots. Sci. Robot. 2019, 4, eaax7329. [Google Scholar] [CrossRef] [PubMed]
- Pittiglio, G.; Lloyd, P.; da Veiga, T.; Onaizah, O.; Pompili, C.; Chandler, J.H.; Valdastri, P. Patient-Specific Magnetic Catheters for Atraumatic Autonomous Endoscopy. Soft Robot. 2022, 9, 1120–1133. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Zhang, J.; Wei, S.; Chen, D. Kirchhoff rod-based three-dimensional dynamical model and real-time simulation for medical-magnetic guidewires. Comput. Methods Programs Biomed. 2023, 240, 107646. [Google Scholar] [CrossRef]
- Lloyd, P.; Thomas, T.L.; Venkiteswaran, V.K.; Pittiglio, G.; Chandler, J.H.; Valdastri, P.; Misra, S. A Magnetically-Actuated Coiling Soft Robot with Variable Stiffness. IEEE Robot. Autom. Lett. 2023, 8, 3262–3269. [Google Scholar] [CrossRef]
- Ma, Y.; An, X.; Yang, Q.; Cai, M.; Tang, Z.; Chang, J.; Iacovacci, V.; Xu, T.; Zhang, L.; Wang, Q. Magnetic Continuum Robot for Intelligent Manipulation in Medical Applications. SmartBot 2025, e12011. [Google Scholar] [CrossRef]
- Wang, Z.; Weng, D.; Li, Z.; Chen, L.; Ma, Y.; Wang, J. A Magnetic-Controlled Flexible Continuum Robot with Different Deformation Modes for Vascular Interventional Navigation Surgery. Actuators 2023, 12, 247. [Google Scholar] [CrossRef]
- Bacchetti, A.; Lloyd, P.; Taccola, S.; Fakhoury, E.; Cochran, S.; Harris, R.A.; Valdastri, P.; Chandler, J.H. Optimization and fabrication of programmable domains for soft magnetic robots: A review. Front. Robot. AI 2022, 9, 1040984. [Google Scholar] [CrossRef]
- Wu, S.; Hamel, C.M.; Ze, Q.; Yang, F.; Qi, H.J.; Zhao, R. Evolutionary Algorithm-Guided Voxel-Encoding Printing of Functional Hard-Magnetic Soft Active Materials. Adv. Intell. Syst. 2020, 2, 2000060. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, D.; Harker, P.; Patel, A.B.; Guo, C.F.; Zhao, X. Evolutionary design of magnetic soft continuum robots. Proc. Natl. Acad. Sci. USA 2021, 118, e2021922118. [Google Scholar] [CrossRef] [PubMed]
- Zhu, A.; Bai, C.; Lu, X.; Zhu, Y.; Wang, K.; Zhu, J. A Magnetic Helical Miniature Robot with Soft Magnetic-Controlled Gripper. IEEE Robot. Autom. Lett. 2024, 9, 3163–3170. [Google Scholar] [CrossRef]
- Chen, W.; Yan, Z.; Wang, L. On mechanics of functionally graded hard-magnetic soft beams. Int. J. Eng. Sci. 2020, 157, 103391. [Google Scholar] [CrossRef]
- Wang, L.; Kim, Y.; Guo, C.F.; Zhao, X. Hard-magnetic elastica. J. Mech. Phys. Solids 2020, 142, 104045. [Google Scholar] [CrossRef]
- Seghir, R.; Arscott, S. Extended PDMS stiffness range for flexible systems. Sens. Actuators A Phys. 2015, 230, 33–39. [Google Scholar] [CrossRef]
- Gutierrez, J.; Cheung, K.; Bagci, A.; Rundek, T.; Alperin, N.; Sacco, R.L.; Wright, C.B.; Elkind, M.S.V. Brain Arterial Diameters as a Risk Factor for Vascular Events. J. Am. Heart Assoc. 2015, 4, e002289. [Google Scholar] [CrossRef]
- Gutierrez, J.; Kulick, E.; Park Moon, Y.; Dong, C.; Cheung, K.; Ahmet, B.; Stern, Y.; Alperin, N.; Rundek, T.; Sacco, R.L.; et al. Brain Arterial Diameters and Cognitive Performance: The Northern Manhattan Study. J. Int. Neuropsychol. Soc. 2018, 24, 335–346. [Google Scholar] [CrossRef]
- Melgarejo, J.D.; Gurel, K.; Compton, C.R.; Liu, M.; Guzman, V.; Assuras, S.; Levin, B.E.; Elkind, M.S.V.; Ikram, M.K.; Kavousi, M.; et al. Brain artery diameters and risk of dementia and stroke. Alzheimer’s Dement. 2024, 20, 2497–2507. [Google Scholar] [CrossRef]
- Iacovacci, V.; Naselli, I.; Salgarella, A.R.; Clemente, F.; Ricotti, L.; Cipriani, C. Stability and in vivo safety of gold, titanium nitride and parylene C coatings on NdFeB magnets implanted in muscles towards a new generation of myokinetic prosthetic limbs. RSC Adv. 2021, 11, 6766–6775. [Google Scholar] [CrossRef]
- Rumbo, C.; Espina, C.C.; Gassmann, J.; Tosoni, O.; Barros García, R.; Martín, S.M.; Tamayo-Ramos, J.A. In vitro safety evaluation of rare earth-lean alloys for permanent magnets manufacturing. Sci. Rep. 2021, 11, 12633. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Q.; Yang, S.; Dong, Y. Multi-Strategy Grey Wolf Optimization Algorithm for Global Optimization and Engineering Applications. J. Syst. Sci. Syst. Eng. 2024, 34, 203–230. [Google Scholar] [CrossRef]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Shang, Y.; Zheng, X.; Li, J.; Liu, D.; Wang, P. A Comparative Analysis of Swarm Intelligence and Evolutionary Algorithms for Feature Selection in SVM-Based Hyperspectral Image Classification. Remote Sens. 2022, 14, 3019. [Google Scholar] [CrossRef]
- Krishnamurthy, A.; Nayak, S.R.; Ganesh Kumar, C.; Jetti, R.; Prabhu, L.V.; Ranade, A.V.; Rai, R. Morphometry of posterior cerebral artery: Embryological and clinical significance. Rom. J. Morphol. Embryol. 2008, 49, 43–45. [Google Scholar]
- Fu, S.; Chen, B.; Li, D.; Han, J.; Xu, S.; Wang, S.; Huang, C.; Qiu, M.; Cheng, S.; Wu, X.; et al. A Magnetically Controlled Guidewire Robot System with Steering and Propulsion Capabilities for Vascular Interventional Surgery. Adv. Intell. Syst. 2023, 5, 2300267. [Google Scholar] [CrossRef]
- Meng, X.; Li, S.; Shen, X.; Tian, C.; Mao, L.; Xie, H. Programmable spatial magnetization stereolithographic printing of biomimetic soft machines with thin-walled structures. Nat. Commun. 2024, 15, 10442. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Liu, Y.; Lu, X.; Zhu, Y.; Bai, C. Design and Optimization of a Tapered Magnetic Soft Continuum Robot for Enhanced Navigation in Cerebral Vasculature. Micromachines 2025, 16, 701. https://doi.org/10.3390/mi16060701
Wang J, Liu Y, Lu X, Zhu Y, Bai C. Design and Optimization of a Tapered Magnetic Soft Continuum Robot for Enhanced Navigation in Cerebral Vasculature. Micromachines. 2025; 16(6):701. https://doi.org/10.3390/mi16060701
Chicago/Turabian StyleWang, Jiahang, Yuhang Liu, Xiwen Lu, Yunlong Zhu, and Chenyao Bai. 2025. "Design and Optimization of a Tapered Magnetic Soft Continuum Robot for Enhanced Navigation in Cerebral Vasculature" Micromachines 16, no. 6: 701. https://doi.org/10.3390/mi16060701
APA StyleWang, J., Liu, Y., Lu, X., Zhu, Y., & Bai, C. (2025). Design and Optimization of a Tapered Magnetic Soft Continuum Robot for Enhanced Navigation in Cerebral Vasculature. Micromachines, 16(6), 701. https://doi.org/10.3390/mi16060701