
Research on Drive and Detection Technology of CMUT Multi-Array Transducers Based on MEMS Technology



 ,
, 
Abstract
1. Introduction
2. Design and Implementation of CMUTs
2.1. Theoretical Analysis
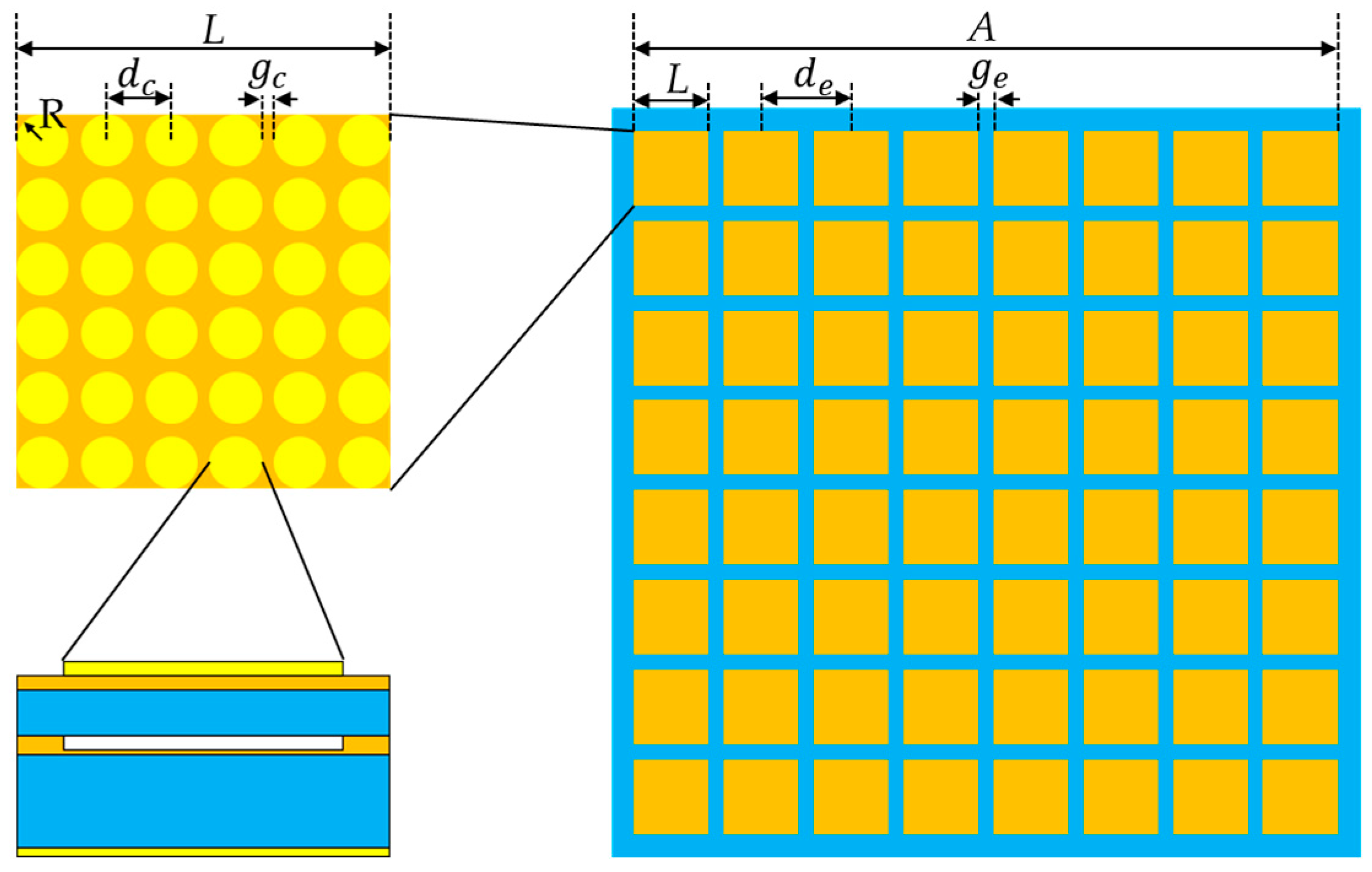
2.1.1. Structural Description
2.1.2. Operating Modes
2.1.3. Characteristic Parameters
2.2. Finite Element Simulation Analysis
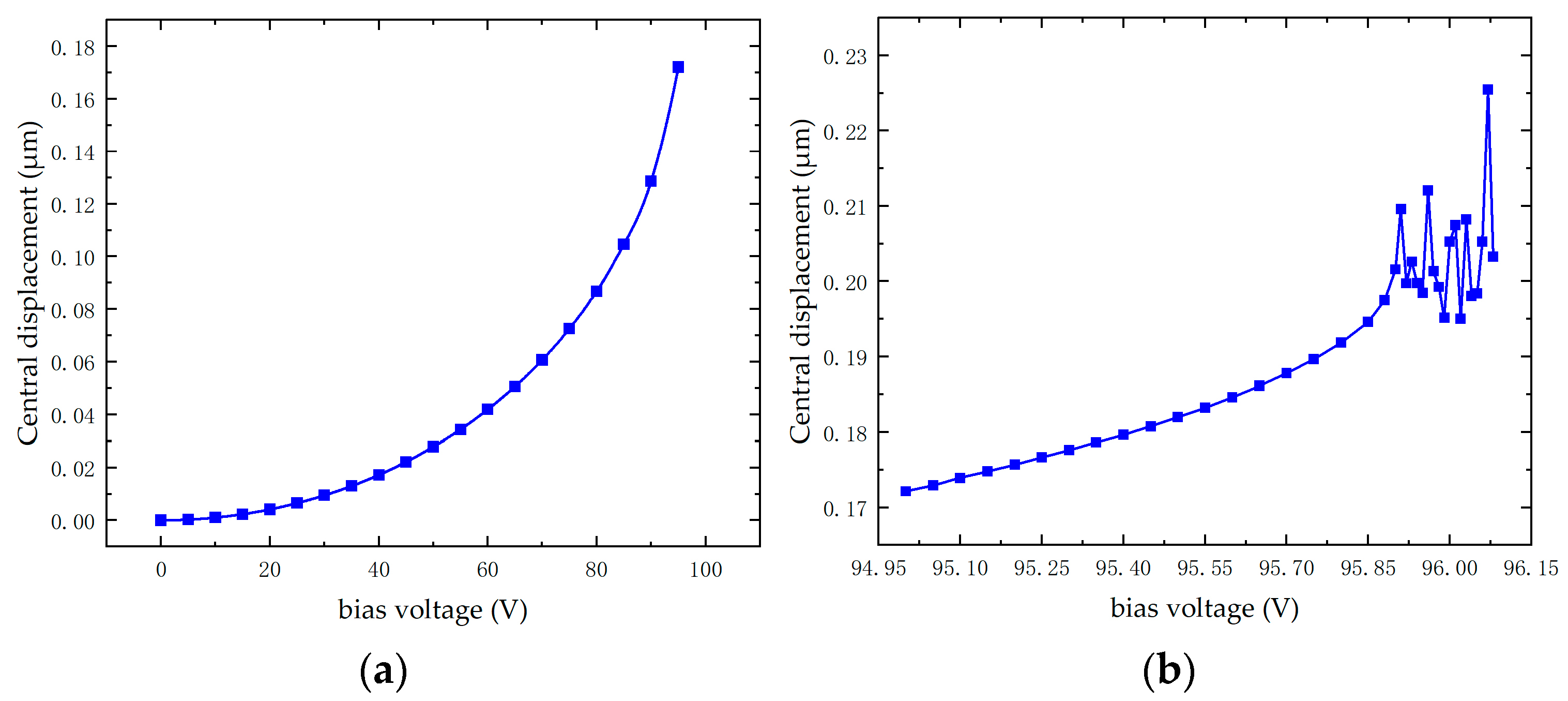
2.2.1. Collapse Voltage
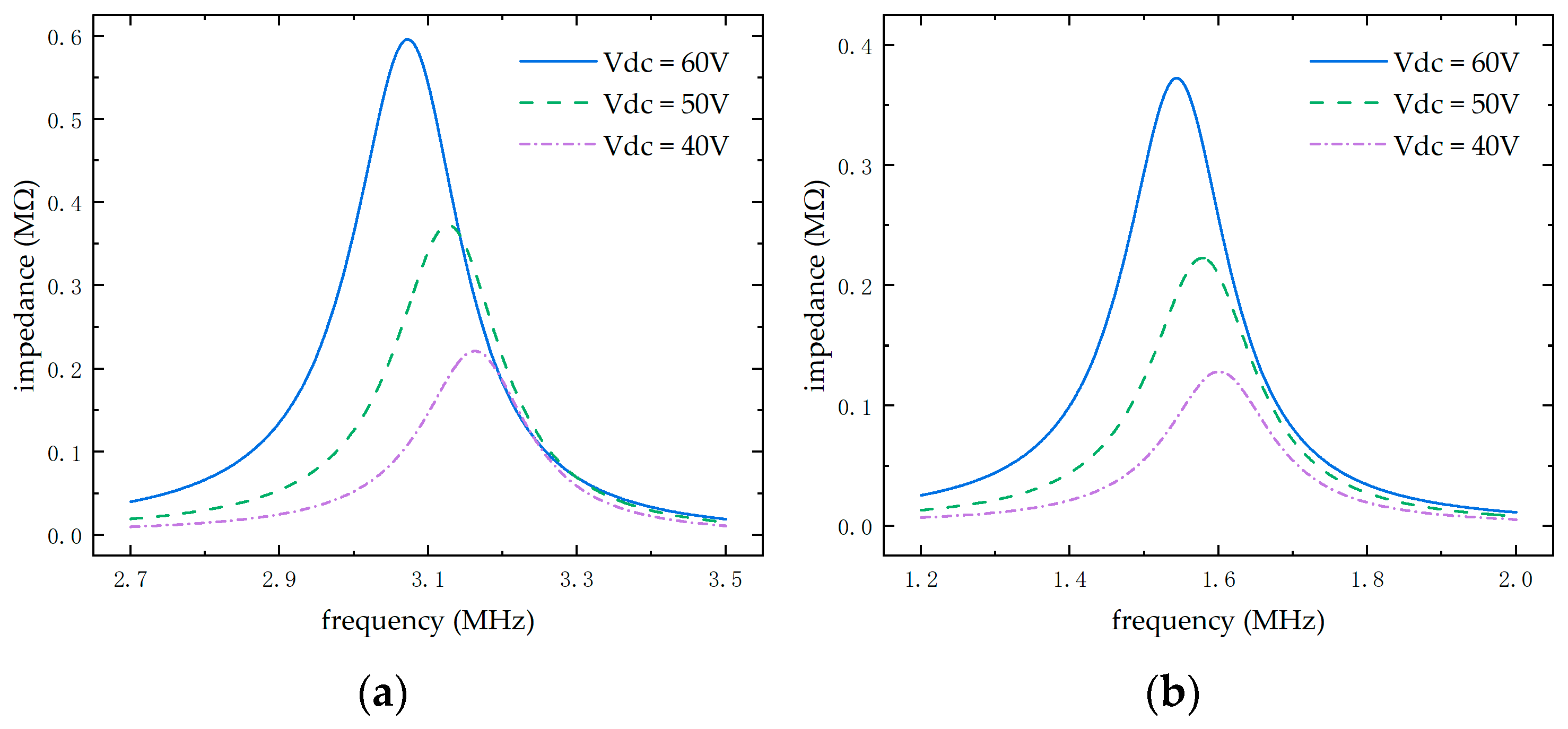
2.2.2. Resonant Frequency
3. Design of Drive and Detection System
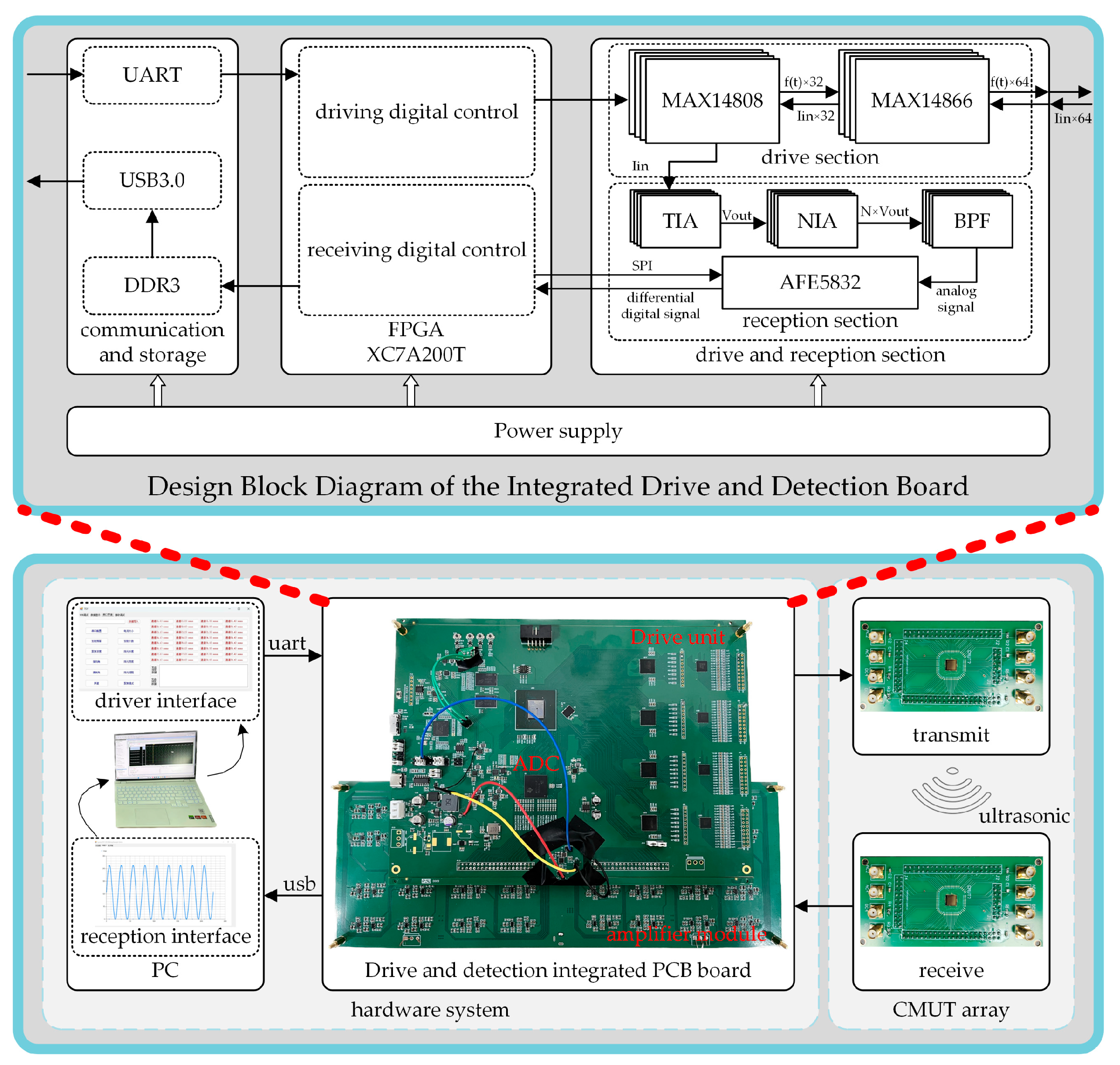
3.1. System Overview
3.2. Realization of Controllable Excitation Signal
3.2.1. Focusing and Deflection of CMUT Array
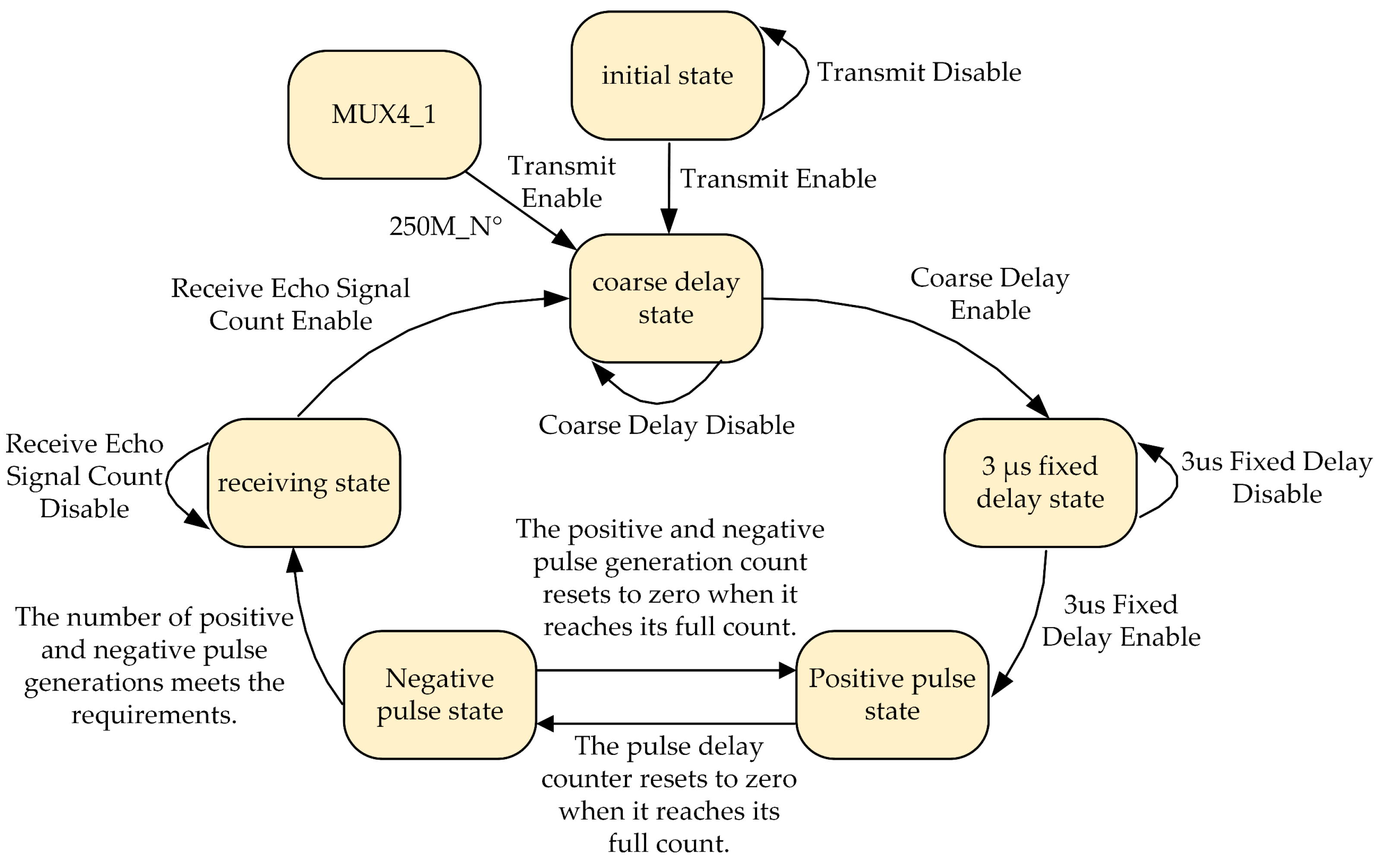
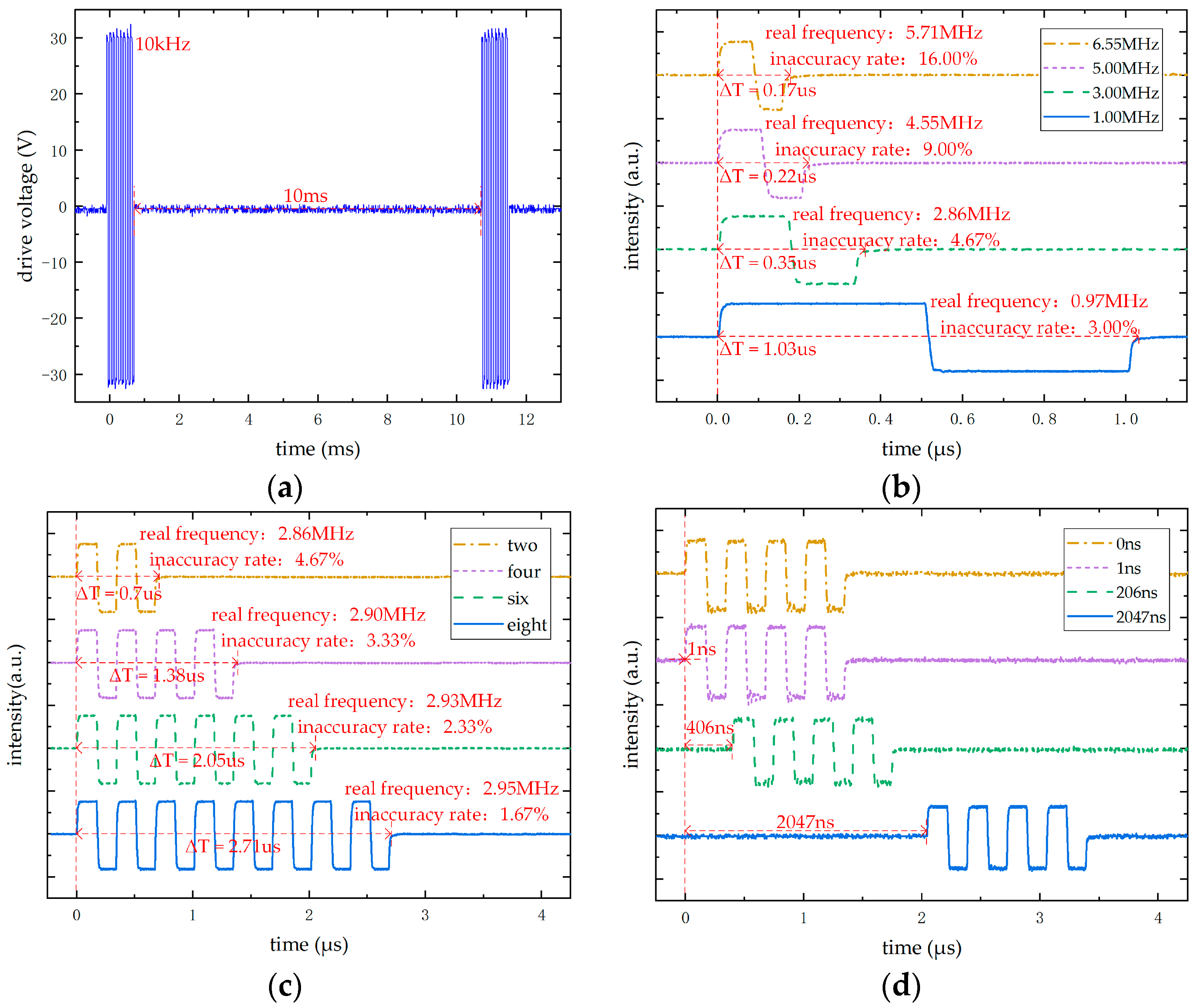
3.2.2. Real-Time Controllable Pulse Wave
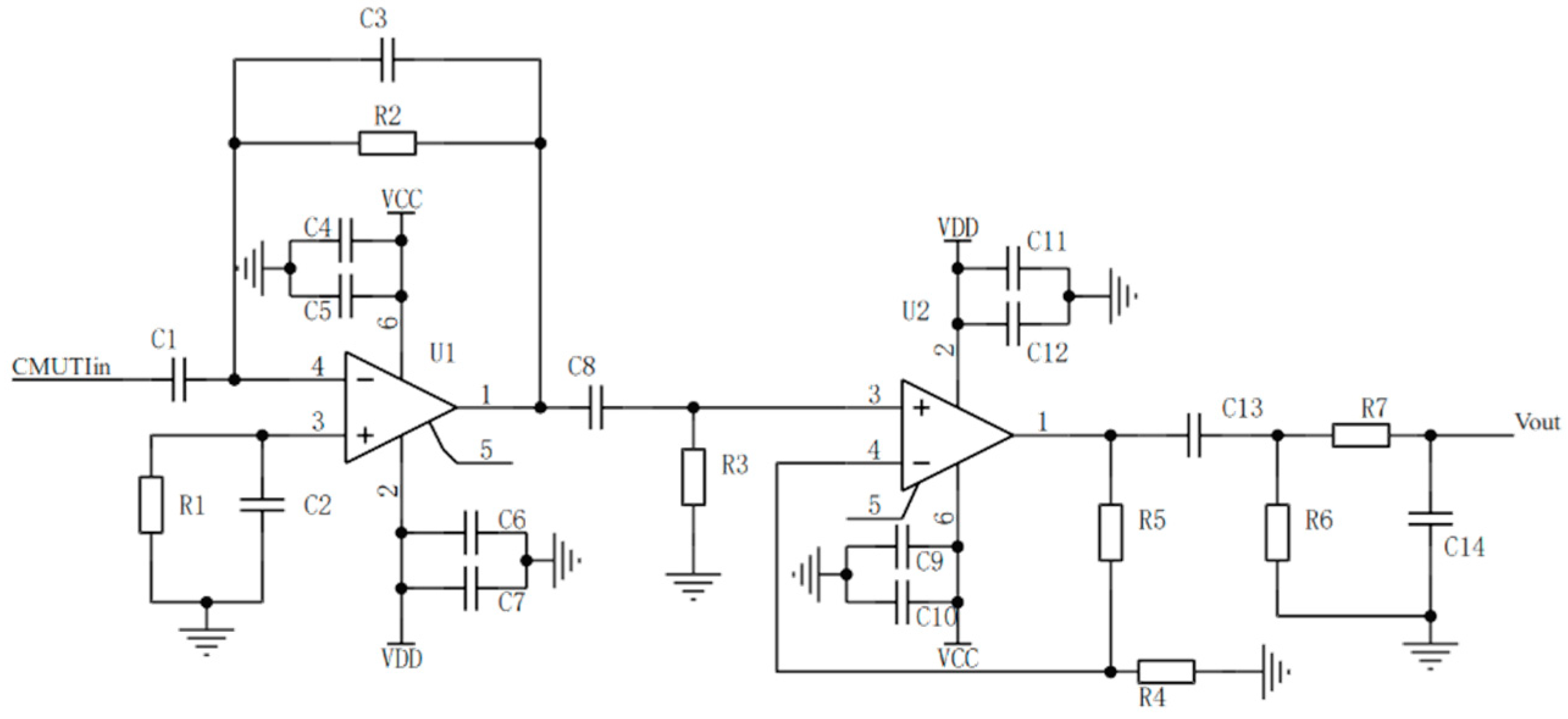
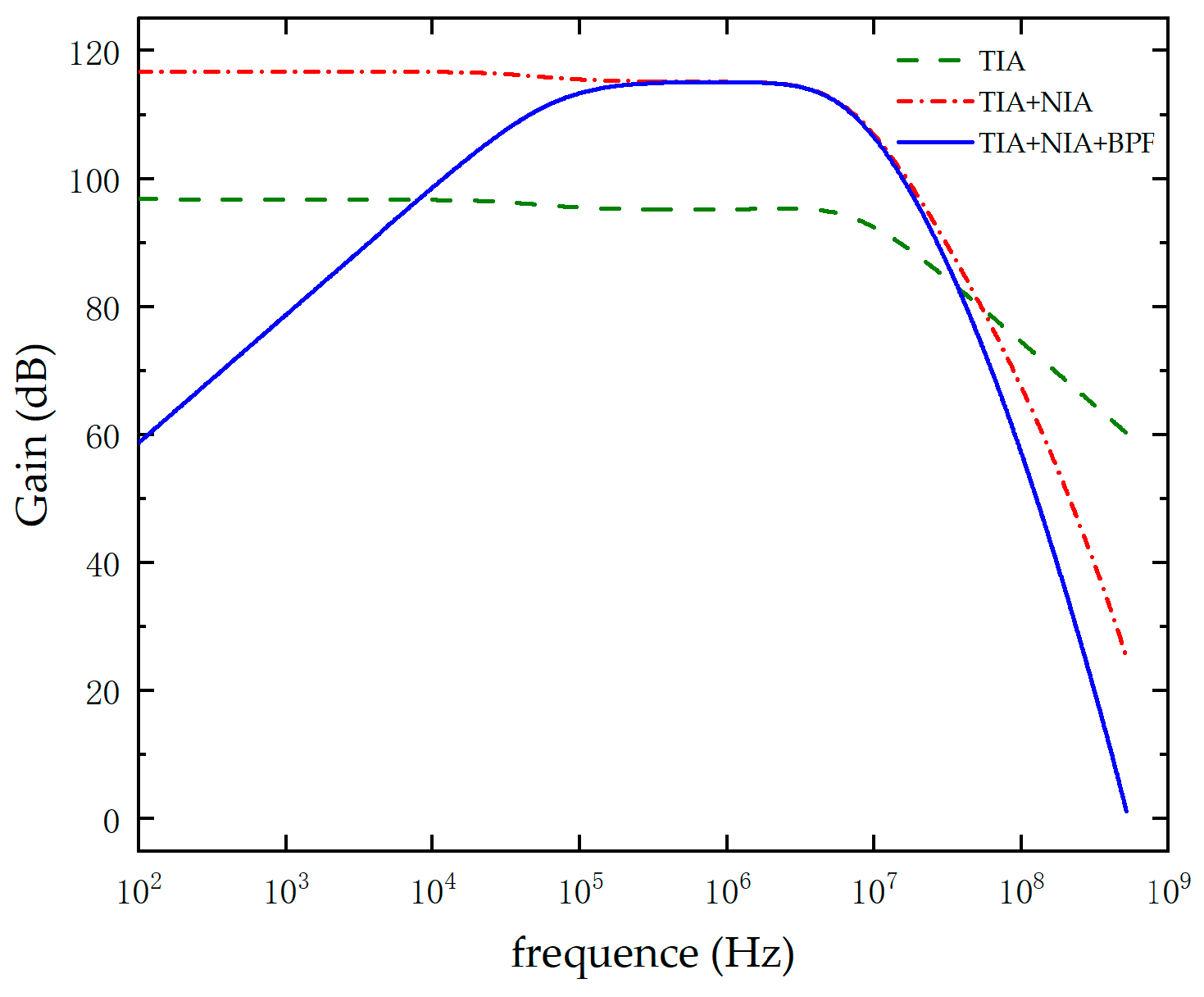
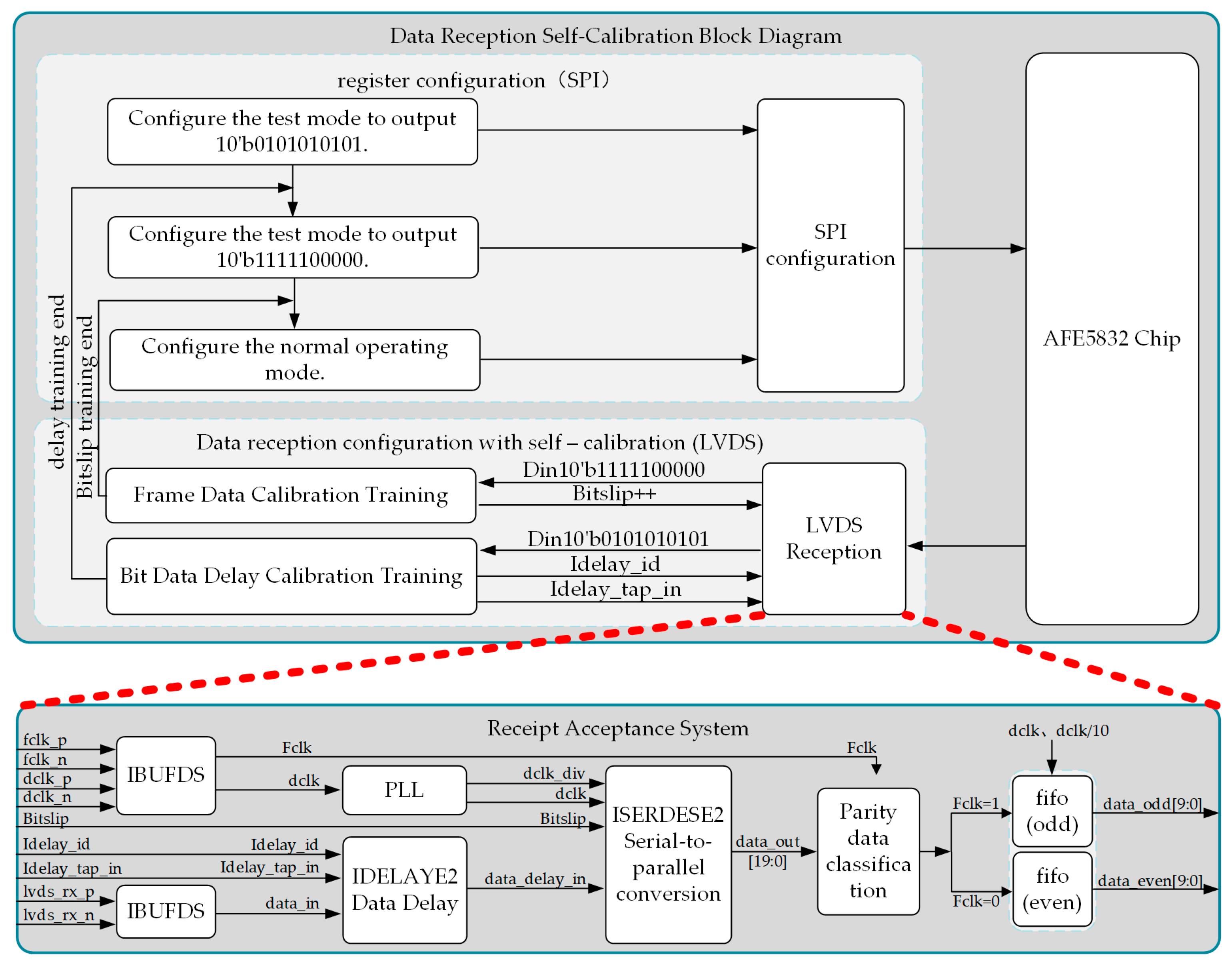
3.3. Circuit for Detecting High-Frequency Weak and Tiny Signals
4. Experimental Verification
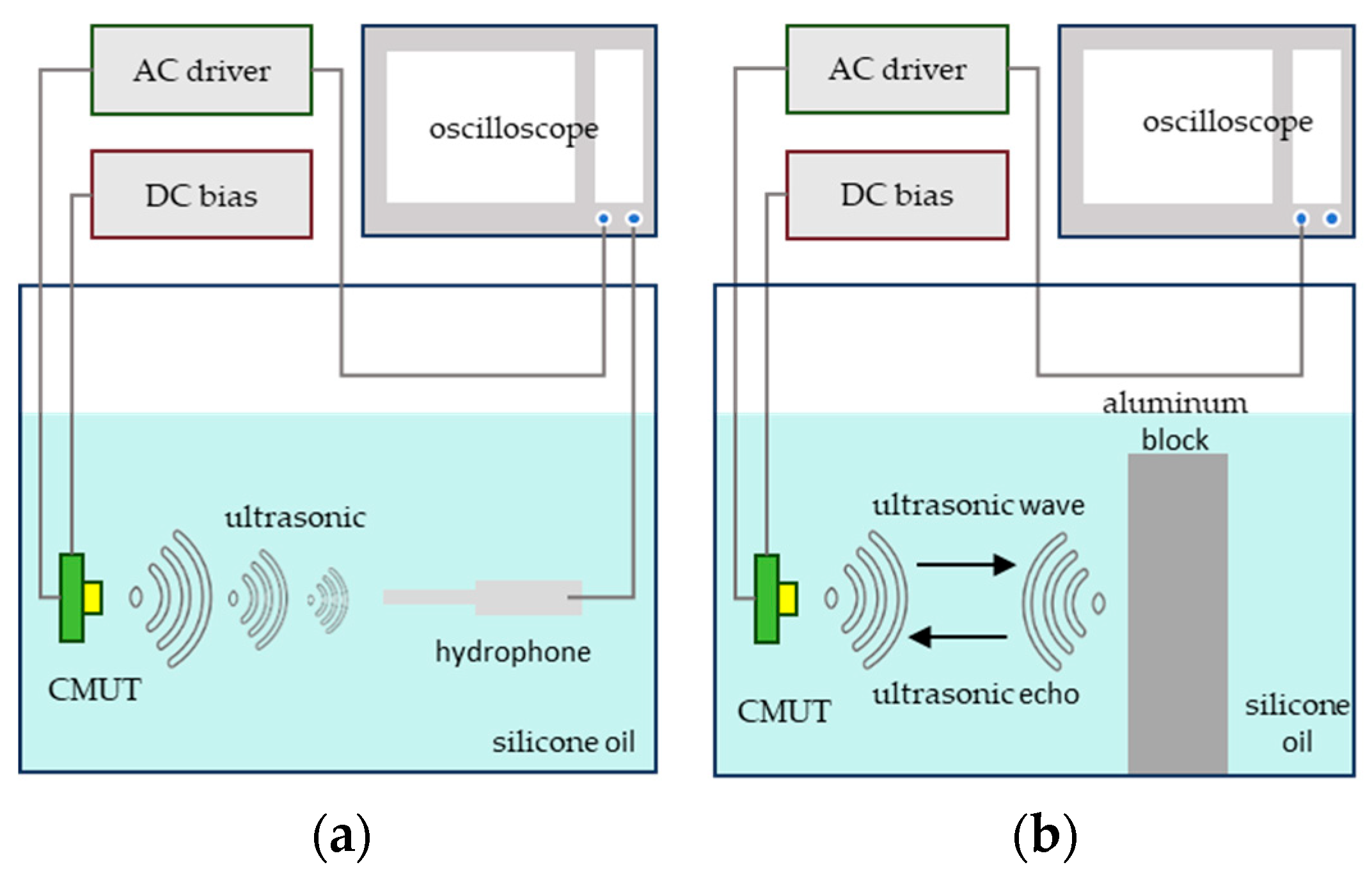
4.1. Experimental Environment
4.2. Performance Testing
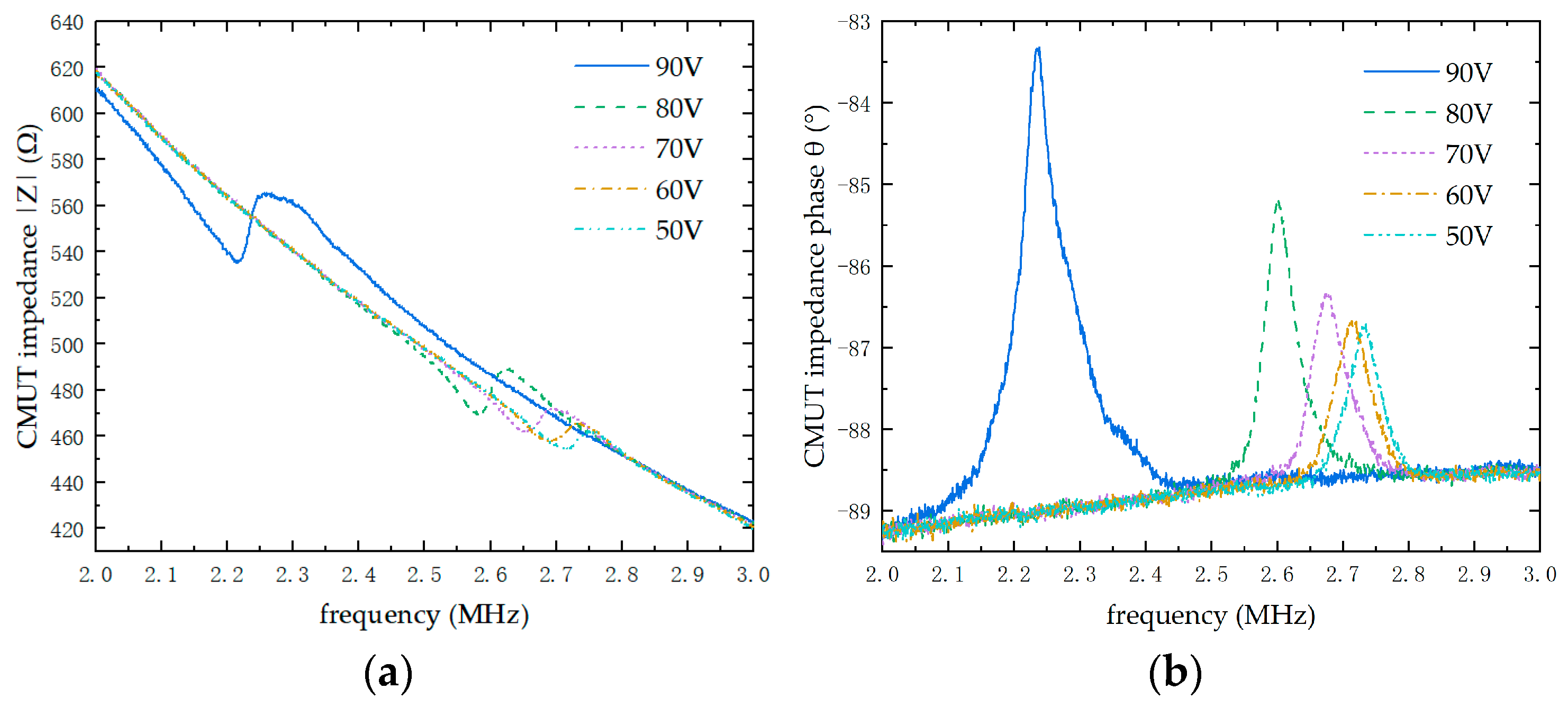
4.2.1. CMUT Impedance Testing
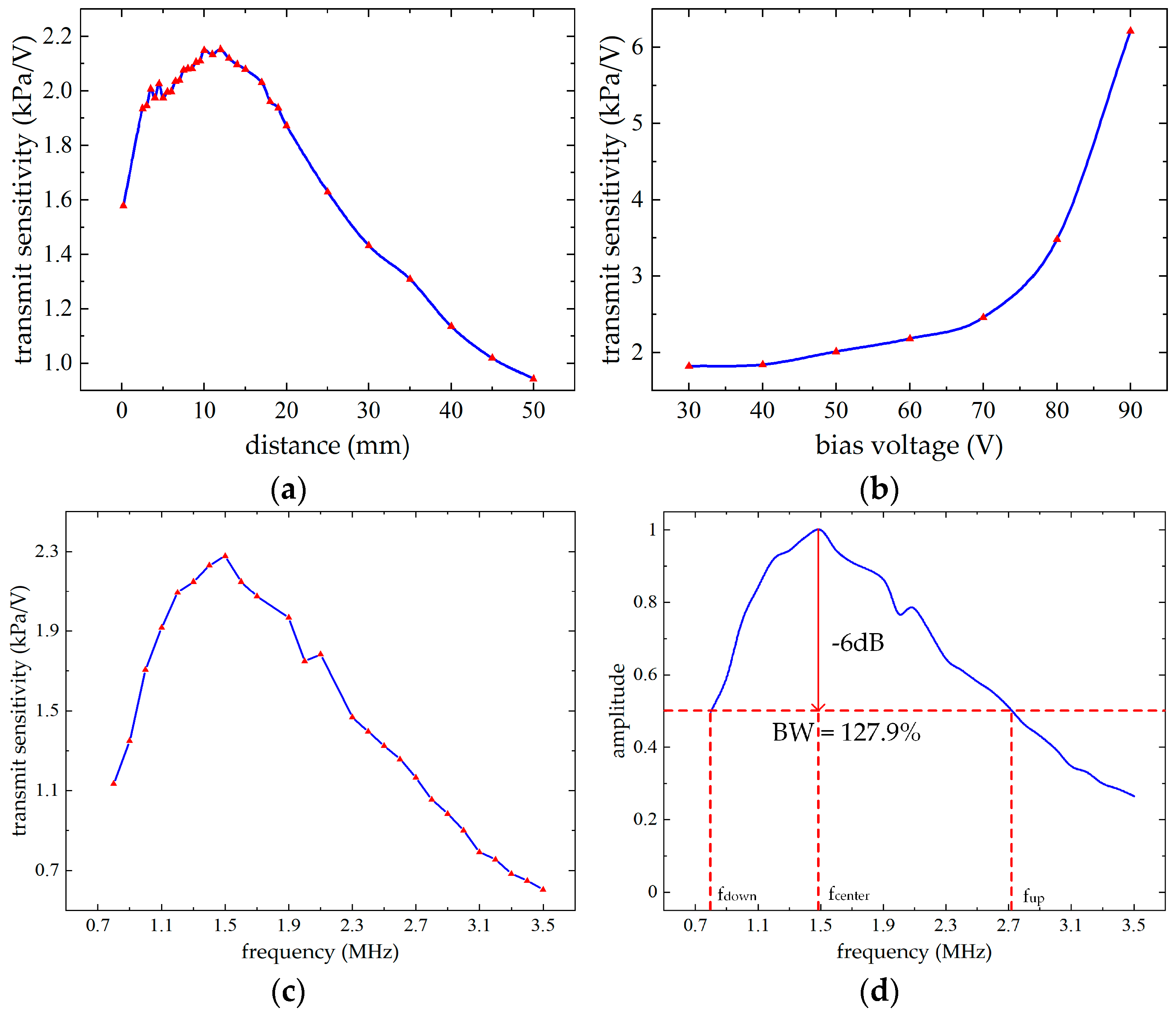
4.2.2. LDV Characterization of the CMUT
4.2.3. Drive Testing
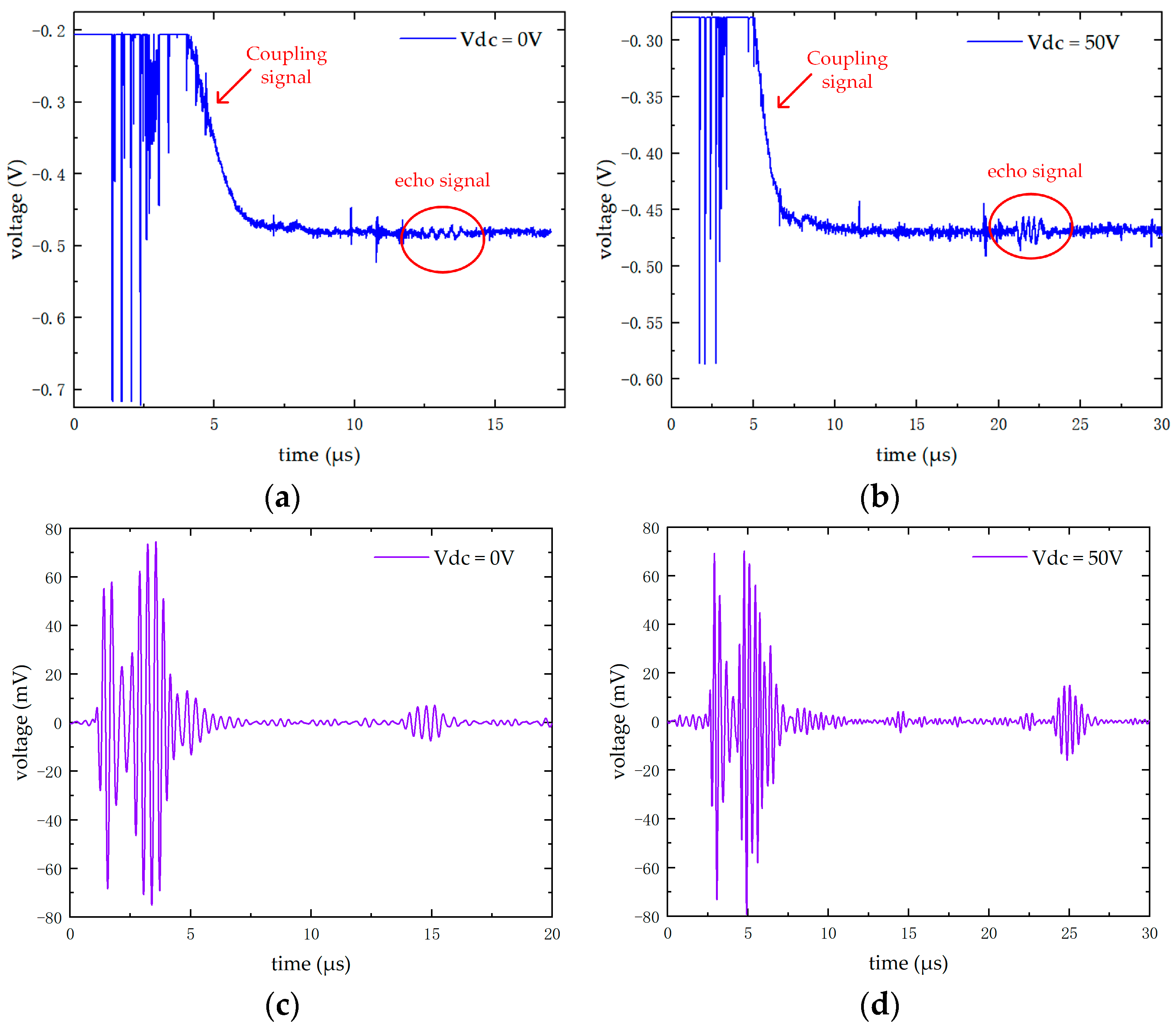
4.2.4. System Testing
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shi, K.; Guo, Y. Phased Array Ultrasonic Imaging and Testing; Higher Education Press: Beijing, China, 2010; pp. 3–7. [Google Scholar]
- Dew, E.B.; Zemp, R.J. High-Performance Electrode-Post CMUTs: Fabrication Details and Best Practices. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2023, 70, 1270–1285. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Yang, H.; Chen, Z.; Zheng, Q.; Jiang, H.; Feng, P.X.L.; Xie, H. Development of dual-frequency PMUT arrays based on thin ceramic PZT for endoscopic photoacoustic imaging. J. Microelectromech. Syst. 2021, 30, 770–782. [Google Scholar] [CrossRef] [PubMed]
- Moisello, E.; Novaresi, L.; Sarkar, E.; Malcovati, P.; Costa, T.; Bonizzoni, E. PMUT and CMUT devices for biomedical applications: A review. IEEE Access 2024, 12, 18640–18657. [Google Scholar] [CrossRef]
- Ding, X.; Wu, Z.; Gao, M.; Chen, M.; Li, J.; Wu, T.; Lou, L. A high-sensitivity bowel sound electronic monitor based on piezoelectric micromachined ultrasonic transducers. Micromachines 2022, 13, 2221. [Google Scholar] [CrossRef]
- Ding, H.; Yang, D.; Qu, M.; Yang, C.; Chen, X.; Le, X.; Zhu, K.; Xu, J.; Lin, L.; Xie, J. A pulsed wave Doppler ultrasound blood flowmeter by PMUTs. J. Microelectromechanical Syst. 2021, 30, 680–682. [Google Scholar] [CrossRef]
- Manwar, R.; Kratkiewicz, K.; Avanaki, K. Overview of ultrasound detection technologies for photoacoustic imaging. Micromachines 2020, 11, 692. [Google Scholar] [CrossRef]
- Emadi, T.A.; Buchanan, D.A. A novel 6× 6 element MEMS capacitive ultrasonic transducer with multiple moving membranes for high performance imaging applications. Sens. Actuators A Phys. 2015, 222, 309–313. [Google Scholar] [CrossRef]
- Maadi, M.; Ceroici, C.; Zemp, R.J. Dual-frequency CMUT arrays for multiband ultrasound imaging applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 2532–2542. [Google Scholar] [CrossRef]
- Joseph, J.; Ma, B.; Khuri-Yakub, B.T. Applications of capacitive micromachined ultrasonic transducers: A comprehensive review. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 69, 456–467. [Google Scholar] [CrossRef]
- Yoon, H.S.; Chang, C.; Jang, J.H.; Bhuyan, A.; Choe, J.W.; Nikoozadeh, A.; Watkins, R.D.; Stephens, D.N.; Pauly, K.B.; Khuri-Yakub, B.T. Ex Vivo HIFU Experiments Using a 32×32-Element CMUT Array. A comprehensive review. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 2150–2158. [Google Scholar] [CrossRef]
- Suarez-Castellanos, I.M.; de Sallmard, G.; Vanstaevel, G.; Ganeau, A.; Bawiec, C.; Chapelon, J.Y.; Guillen, N.; Sénégond, N.; N’Djin, W.A. Dynamic ultrasound focusing and centimeter-scale ex vivo tissue ablations with a CMUT probe developed for endocavitary HIFU therapies. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2023, 70, 1470–1481. [Google Scholar] [CrossRef] [PubMed]
- Gholampour, A.; Muller, J.W.; Cano, C.; van Sambeek, M.R.; Lopata, R.; Schwab, H.M.; Wu, M. Multiperspective photoacoustic imaging using spatially diverse CMUTs. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2023, 70, 16–24. [Google Scholar] [CrossRef] [PubMed]
- Ghavami, M.; Sobhani, M.R.; Zemp, R. Transparent dual-frequency CMUT arrays for photoacoustic imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2023, 70, 1621–1630. [Google Scholar] [CrossRef]
- Wong, S.H.; Kupnik, M.; Zhuang, X.; Lin, D.S.; Butts-Pauly, K.; Khuri-Yakub, B.T. Evaluation of wafer bonded CMUTs with rectangular membranes featuring high fill factor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2053–2065. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Chen, J.; Shen, I.M.; Li, P.C.; Wang, M.H. 6F-3 fabrication and assembly of a monolithic 3D CMUT array for imaging applications. In Proceedings of the 2008 IEEE Ultrasonics Symposium, New York, NY, USA, 28–31 October 2007; pp. 515–518. [Google Scholar]
- Na, S.; Li, Z.; Wong, L.L.; Chen, A.I.H.; Macecek, M.; Yeow, J.T. An optimization and comparative study of air-coupled CMUT cells with circular and annular geometries. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1723–1734. [Google Scholar] [CrossRef]
- Maadi, M.; Zemp, R.J. A nonlinear lumped equivalent circuit model for a single uncollapsed square CMUT cell. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2019, 66, 1340–1351. [Google Scholar] [CrossRef]
- Huang, X.; Wang, H.; Yu, L. Investigation on design theory and performance analysis of vacuum capacitive micromachined ultrasonic transducer. Micromachines 2021, 12, 1127. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, L.; Zhao, Y.; Li, J.; Xu, T.; Hu, K.; Liu, Z.; Yang, P.; Luo, G.; Lin, Q.; et al. Closed-form expressions on CMUTs with layered anisotropic microplates under residual stress and pressure. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 68, 1828–1843. [Google Scholar] [CrossRef]
- Pei, Y.; Zhang, Y.; Hu, S.; Wang, Z.; Li, Y.; He, C.; Zhang, S.; Wang, R.; Zhang, W.; Zhang, G. Breast transmission ultrasound tomography based on capacitive micromachined ultrasonic transducer linear arrays. IEEE Sens. J. 2021, 22, 1209–1217. [Google Scholar] [CrossRef]
- Adelegan, O.J.; Coutant, Z.A.; Zhang, X.; Yamaner, F.Y.; Oralkan, Ö. Fabrication of 2D capacitive micromachined ultrasonic transducer (CMUT) arrays on insulating substrates with through-wafer interconnects using sacrificial release process. J. Microelectromech. Syst. 2020, 29, 553–561. [Google Scholar] [CrossRef]
- Saccher, M.; Savoia, A.S.; Van Schaijk, R.; Klootwijk, J.H.; Dekker, R. Pre-Charged Collapse-Mode Capacitive Micromachined Ultrasonic Transducers (CMUT) Receivers for Efficient Power Transfer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2024, 72, 283–297. [Google Scholar] [CrossRef]
- Jia, L.; Liang, Y.; Meng, F.; Wang, Z.; Zhang, G.; Wang, R.; He, C.; Yang, Y.; Cui, J.; Zhang, W. Research on Acoustic Impedance Matching Method of CMUT Sensor Based on PDMS/BN Particles. IEEE Sens. J. 2024, 24, 24622–24629. [Google Scholar] [CrossRef]
- Farhanieh, O.; Sahafi, A.; Roy, R.B.; Ergun, A.S.; Bozkurt, A. Integrated HIFU drive system on a chip for CMUT-based catheter ablation system. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 534–546. [Google Scholar] [CrossRef] [PubMed]
- Zhou, M.; Ouzounov, S.; Cantatore, E.; Harpe, P. An RX AFE with programmable BP filter and digitization for ultrasound harmonic imaging. IEEE Trans. Biomed. Circuits Syst 2021, 15, 1430–1440. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wang, X.; He, C.; Xue, C. Reception characteristics investigation and measurement of capacitive micromachined ultrasonic transducer. Sens. Rev. 2019, 40, 237–246. [Google Scholar] [CrossRef]
- Maadi, M.; Chee, R.; Zemp, R.J. Mutual radiation impedance for modeling of multi-frequency CMUT arrays. In Proceedings of the 2015 IEEE International Ultrasonics Symposium (IUS), Taipei, Taiwan, 21–24 October 2015; pp. 1–4. [Google Scholar]
- Zhao, L.; Jiang, Z.; Li, Z.; Zhao, Y. Modeling of electrostatically actuated microplates. In Micro Electro Mechanical Systems; Micro/Nano Technologies; Huang, Q.A., Ed.; Springer: Singapore, 2018; pp. 105–108. [Google Scholar]
- Zhao, Y.; Zhao, L.; Li, Z.; Li, J.; Yang, P.; Xu, T.; Liu, Z.; Guo, S.; Wang, J.; Jiang, Z. Capacitive micromachined ultrasonic transducers for transmitting and receiving ultrasound in air. J. Micromech. Microeng. 2019, 29, 125015. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Name | Thickness/μm |
|---|---|
| Top electrode | 0.2 |
| Top insulation layer | 0.3 |
| Membrane | 2 |
| Vacuum cavity | 0.4 |
| Edge support | 0.4 |
| Bottom insulation layer | 0.15 |
| Structural Name | Value/μm |
|---|---|
| cells spacing/ | 100 |
| cells gap/ | 10 |
| array element diameter/L | 590 |
| array element spacing/ | 620 |
| array element gap/ | 30 |
| aperture/A | 4930 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Chen, J.; Liu, C.; Xie, Y.; Cui, Y.; Zhang, S.; Li, Z.; Zhao, L.; Chen, G.; Wei, S.; et al. Research on Drive and Detection Technology of CMUT Multi-Array Transducers Based on MEMS Technology. Micromachines 2025, 16, 604. https://doi.org/10.3390/mi16060604
Li C, Chen J, Liu C, Xie Y, Cui Y, Zhang S, Li Z, Zhao L, Chen G, Wei S, et al. Research on Drive and Detection Technology of CMUT Multi-Array Transducers Based on MEMS Technology. Micromachines. 2025; 16(6):604. https://doi.org/10.3390/mi16060604
Chicago/Turabian StyleLi, Chenyuan, Jiagen Chen, Chengwei Liu, Yao Xie, Yangyang Cui, Shiwang Zhang, Zhikang Li, Libo Zhao, Guoxing Chen, Shaochong Wei, and et al. 2025. "Research on Drive and Detection Technology of CMUT Multi-Array Transducers Based on MEMS Technology" Micromachines 16, no. 6: 604. https://doi.org/10.3390/mi16060604
APA StyleLi, C., Chen, J., Liu, C., Xie, Y., Cui, Y., Zhang, S., Li, Z., Zhao, L., Chen, G., Wei, S., Gao, Y., & Dong, L. (2025). Research on Drive and Detection Technology of CMUT Multi-Array Transducers Based on MEMS Technology. Micromachines, 16(6), 604. https://doi.org/10.3390/mi16060604