
Energy Harvesting Microelectromechanical System for Condition Monitoring Based on Piezoelectric Transducer Ring

Abstract
1. Introduction
- A ring-shaped piezoelectric transducer is optimized to be embedded in the bearing housing, and the energy from the bearing rolling motion is harvested and stored;
- A self-powered PTR-EH-MEMS is proposed and installed in the housing of the shaft system, which is applied for shaft bearing condition monitoring based on signal processing and transmission;
- The experimental investigation is implemented to test and validate the effectiveness of the proposed PTR-EH-MEMS in energy harvesting and condition monitoring.
2. Preparation of Energy Harvesting Microelectromechanical System
2.1. Working Principle of Piezoelectric Transducer
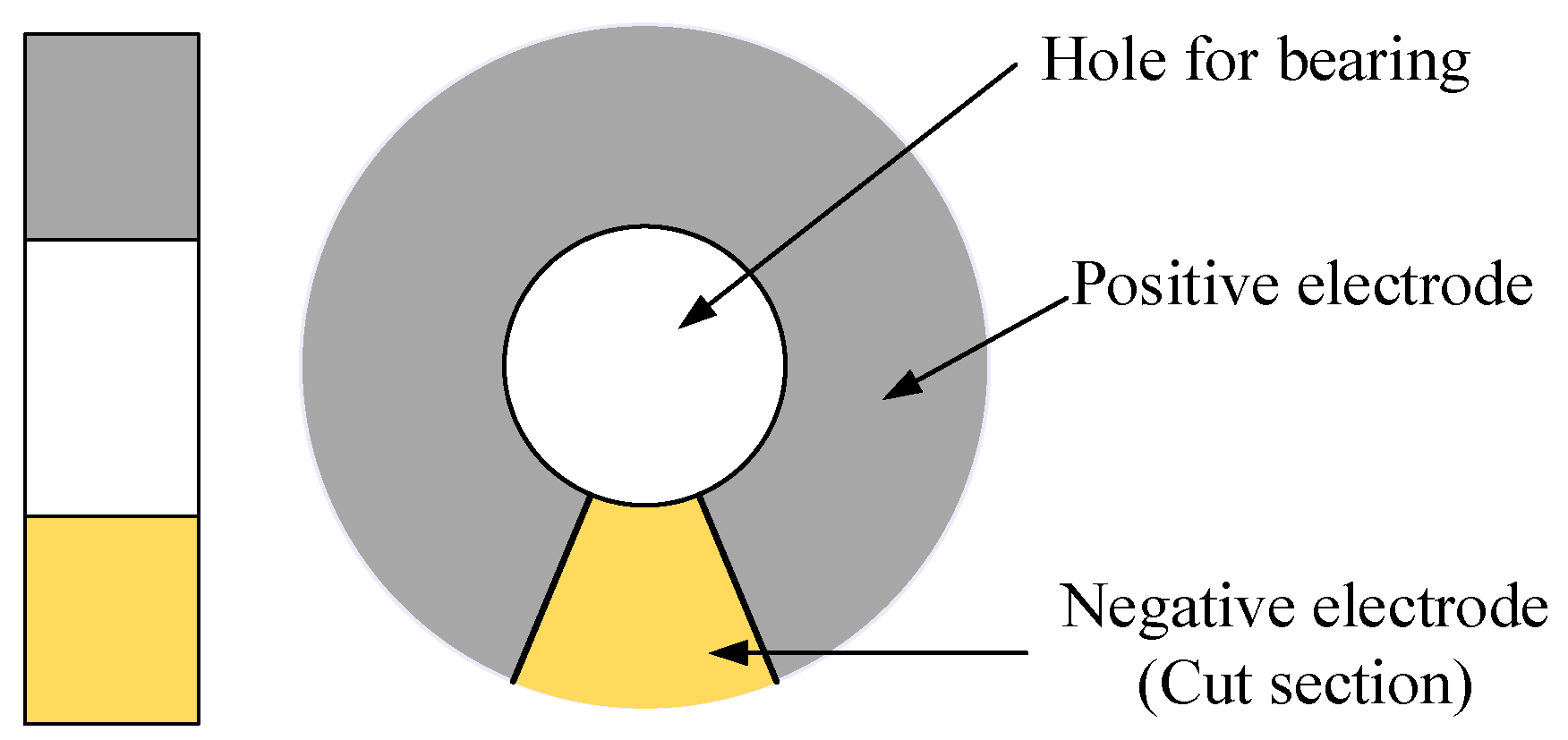
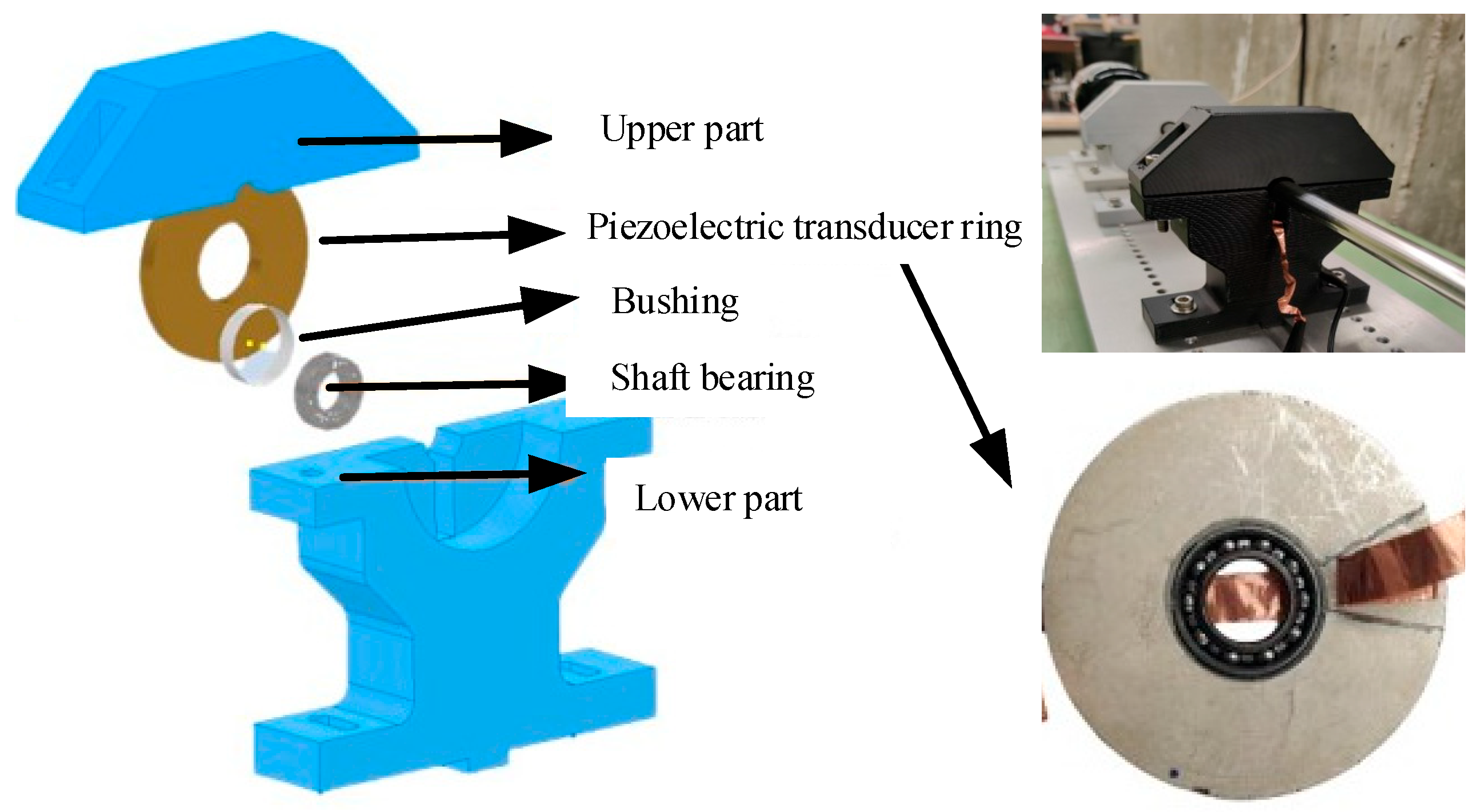
2.2. Piezoelectric Transducer Ring Design
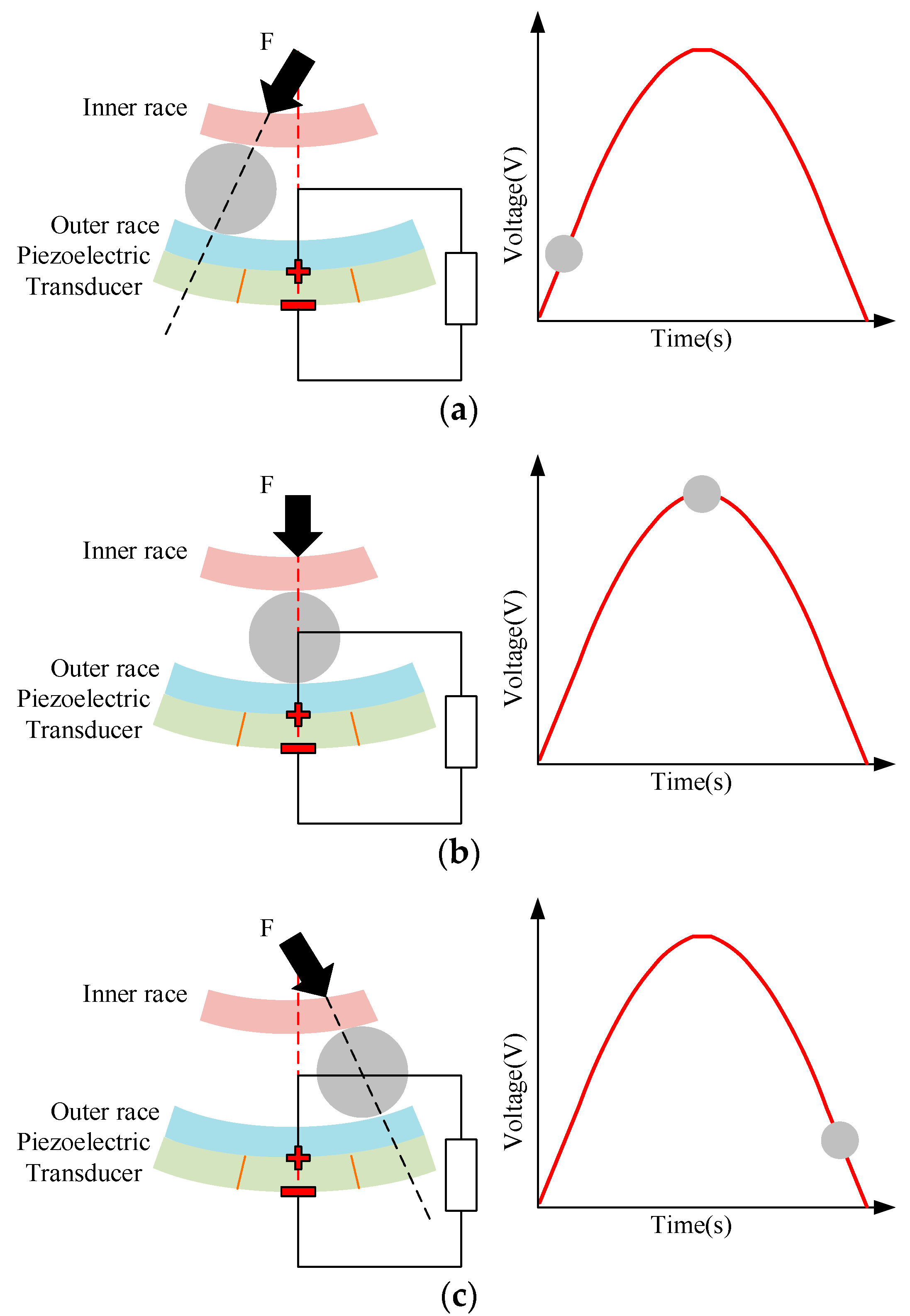
- Approach phase: The rolling ball enters the cut section and the initial compressive stress is created at the leading edge of the piezoelectric element. This leads to an increase in the voltage output, as illustrated in Figure 2a;
- Maximum loading phase: As the rolling ball progresses and reaches the midpoint of the cut section, the voltage attains its peak level and the maximum load is exerted on the section, as depicted in Figure 2b. Specifically, the power output is maximized at the maximum loading phase and is expressed as follows:
- 3.
- Release phase: As the rolling ball exits the cut section, the piezoelectric element is restored from the compressed condition and the voltage output begins to decrease, as shown in Figure 2c.
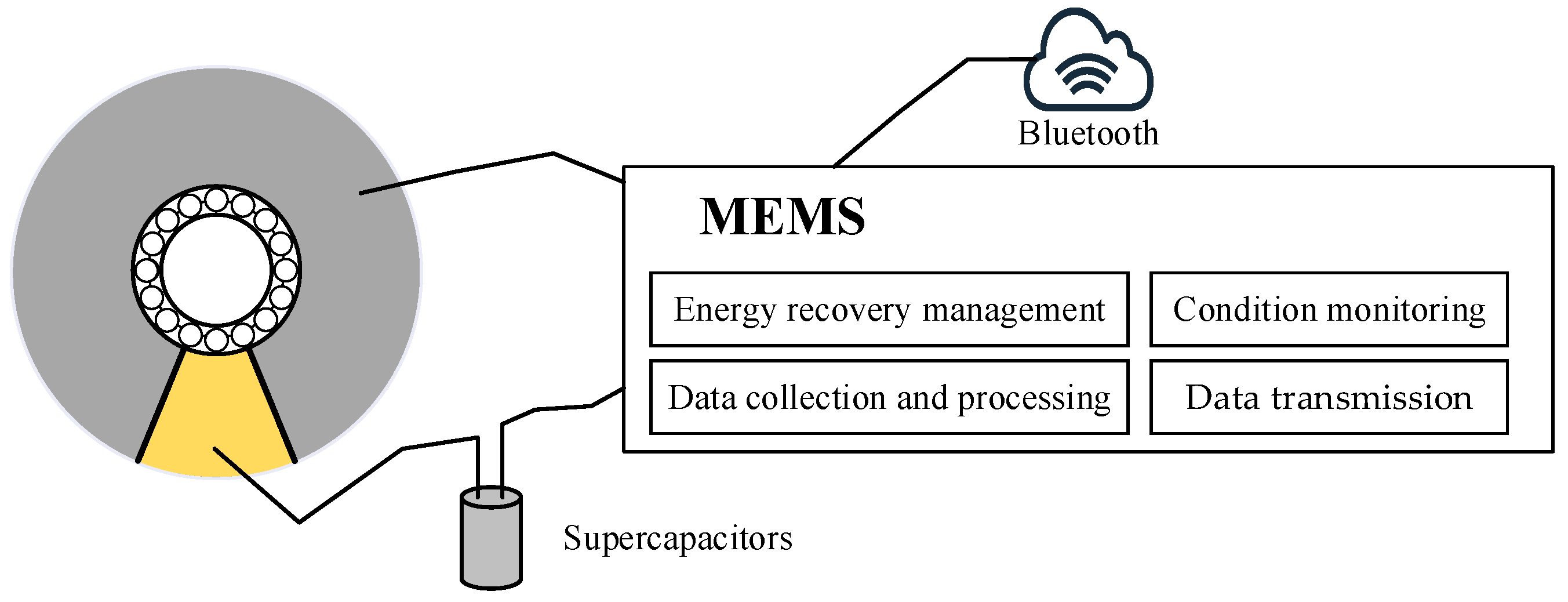
2.3. Piezoelectric Transducer Ring-Based Energy Harvesting Microelectromechanical System
- Energy harvesting: As each rolling ball passes through the cut section, the alternating current is generated based on dynamic deformation of piezoelectric transducer ring. This process follows the conditions of the energy recovery management model for energy harvesting;
- Data collection and processing: The low-power MEMS microcontroller is employed to acquire and process vibration data from the designed piezoelectric transducer ring at certain intervals. The embedded signal processing unit performs real-time Fast Fourier Transform to extract characteristic frequency components;
- Self-powered condition monitoring: By analyzing the bearing faults frequency, the condition monitoring is applied to the shaft bearing. When sufficient energy is stored in the capacitors, Bluetooth is activated to upload processed condition results to nearby gateways, and the device can achieve complete energy autonomy through the harvested energy of the proposed PTR-EH-MEMS.
3. Experimental Investigation
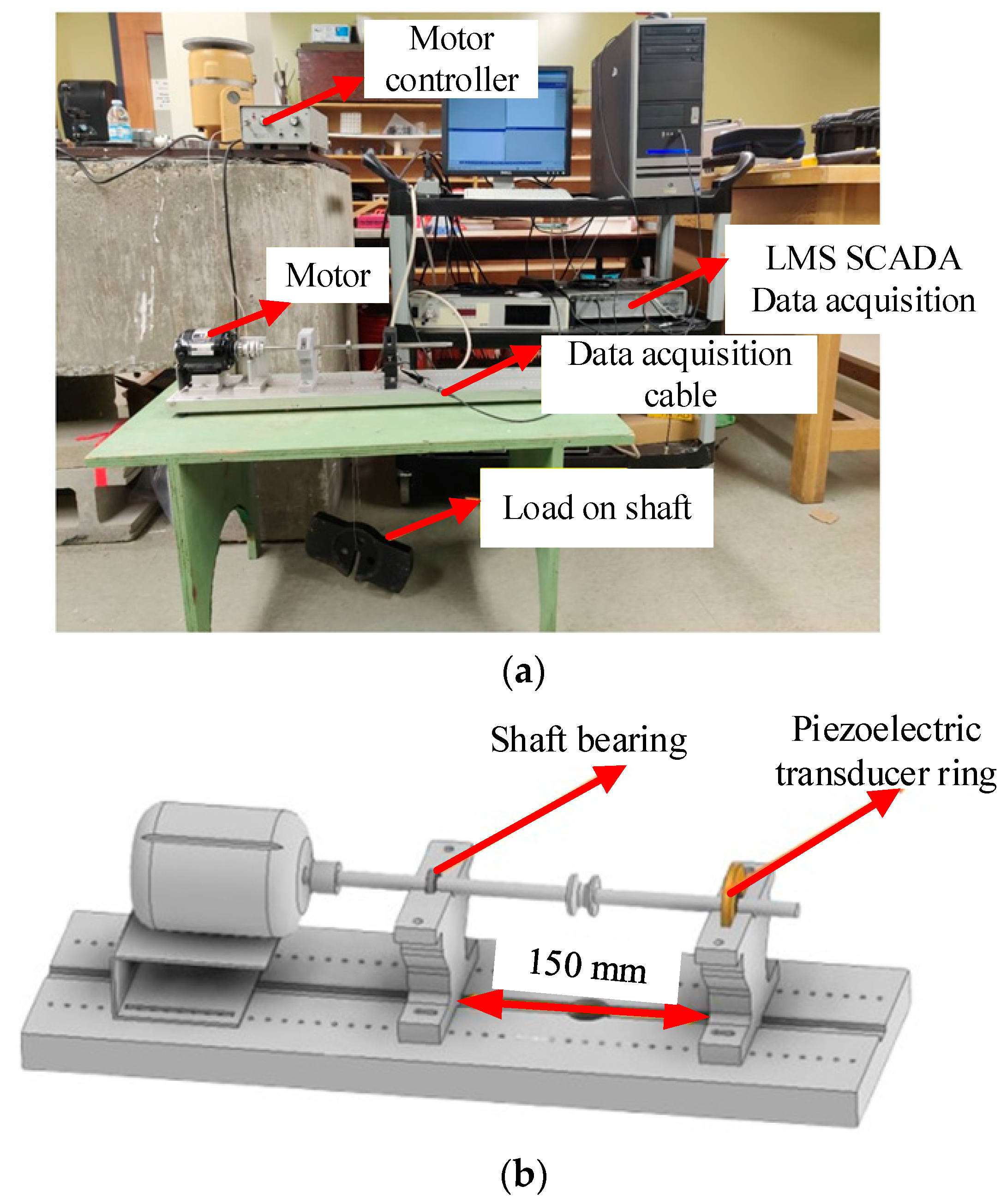
3.1. Experimental Setup
3.2. Experimental Implementation Process
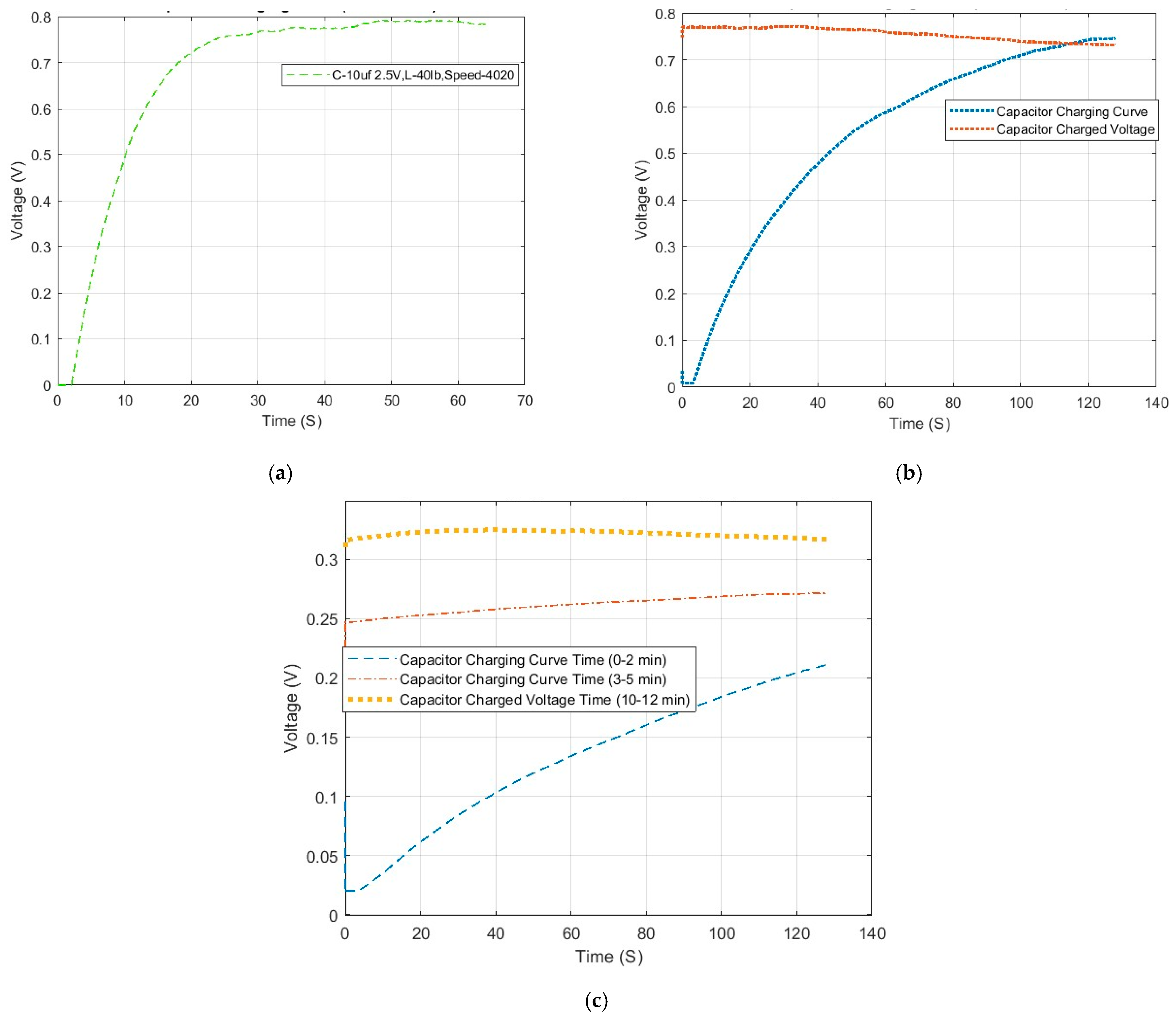
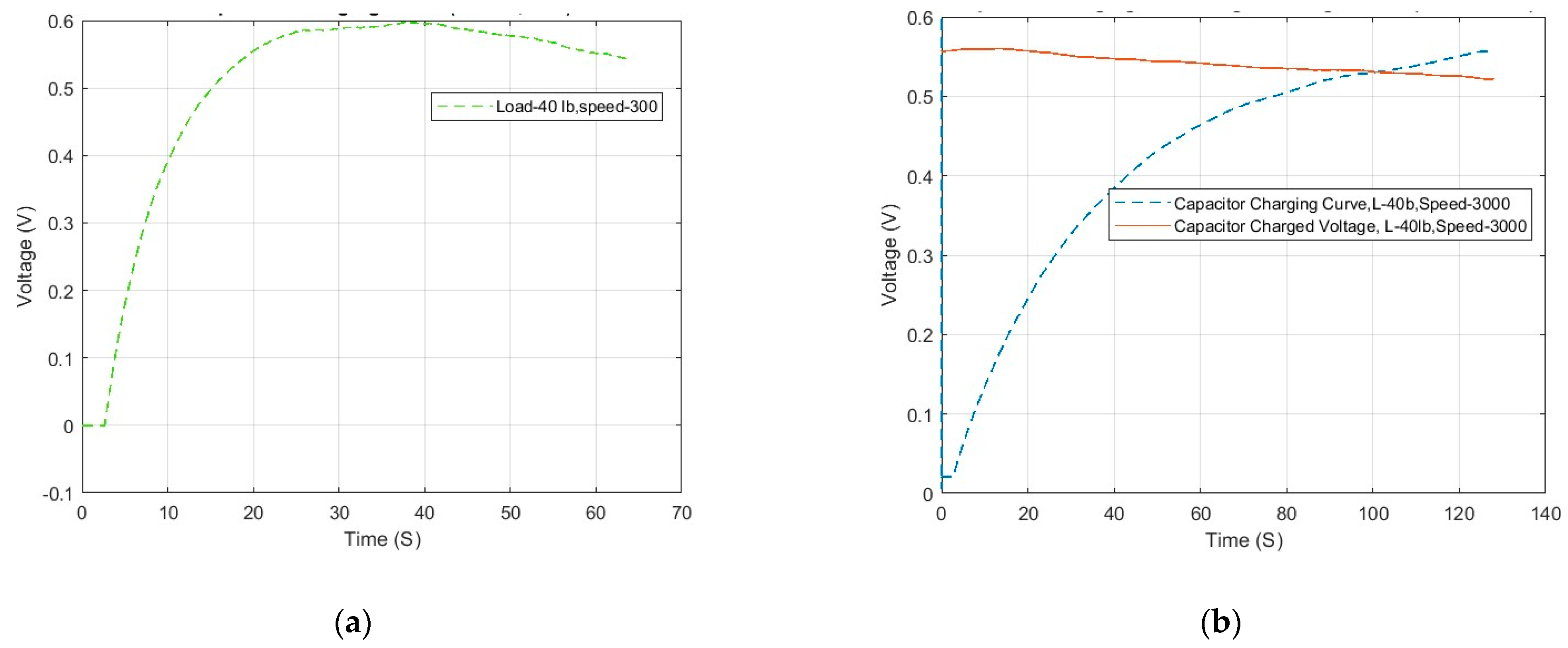
3.3. Effect of Energy Harvesting
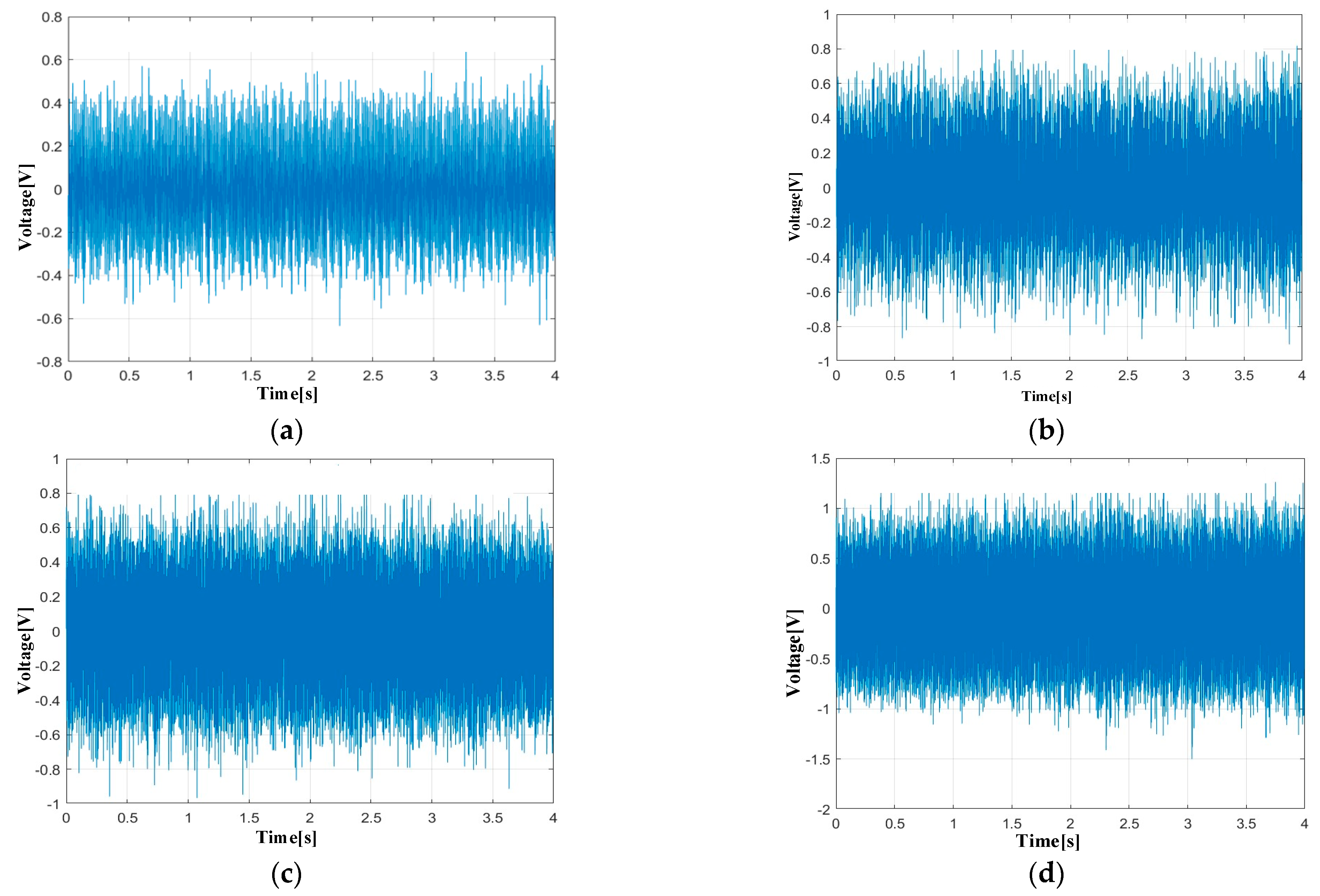
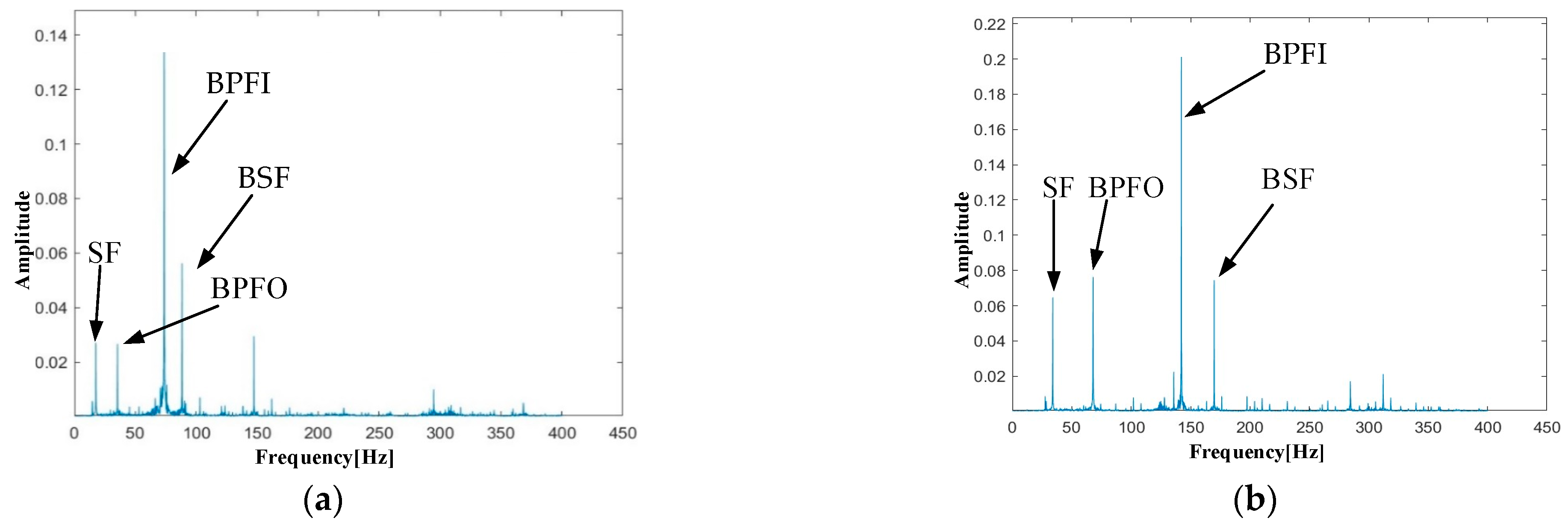
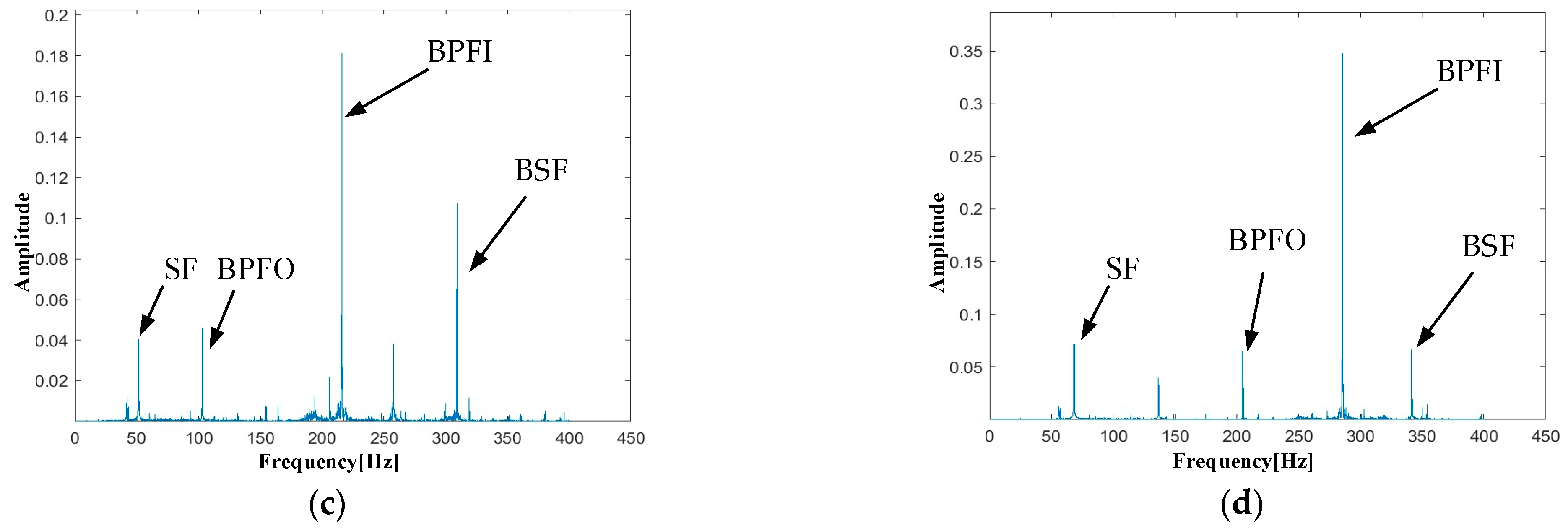
3.4. Effect of Condition Monitoring
3.5. Comparison with Traditional Solutions
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alajrash, B.H.; Salem, M.; Swadi, M.; Senjyu, T.; Kamarol, M.; Motahhir, S. A comprehensive review of FACTS devices in modern power systems: Addressing power quality, optimal placement, and stability with renewable energy penetration. Energy Rep. 2024, 11, 5350–5371. [Google Scholar] [CrossRef]
- Wang, C.; Tian, J.; Zhang, F.; Ai, Y.; Wang, Z.; Chen, R. Simulation method and spectrum modulation characteristic analysis of typical fault signals of inter-shaft bearing. Mech. Syst. Signal Process. 2024, 209, 111145. [Google Scholar] [CrossRef]
- Hassan, I.U.; Panduru, K.; Walsh, J. An in-depth study of vibration sensors for condition monitoring. Sensors 2024, 24, 740. [Google Scholar] [CrossRef] [PubMed]
- Mohanraj, T.; Kirubakaran, E.S.; Madheswaran, D.K.; Sakthivel, N.R.; Pramanik, A. Tool condition monitoring techniques in milling process-A review. J. Mater. Res. Technol. 2024, 35, 092002. [Google Scholar] [CrossRef]
- Kaliyannan, D.; Thangamuthu, M.; Pradeep, P.; Gnansekaran, S.; Rakkiyannan, J.; Pramanik, A. Tool condition monitoring in the milling process using deep learning and reinforcement learning. J. Sens. Actuator Netw. 2024, 13, 42. [Google Scholar] [CrossRef]
- Bai, L.; Zhang, J.; Budak, E.; Tang, Y.; Zhao, W. Vibration energy-based indicators for multi-target condition monitoring in milling operations. J. Manuf. Syst. 2024, 77, 284–300. [Google Scholar] [CrossRef]
- Pan, Y.; Xu, K.; Chen, Z.; Wang, K. Advanced techniques for internal temperature monitoring in lithium-ion batteries: A review of recent developments. Coatings 2025, 15, 268. [Google Scholar] [CrossRef]
- Jia, T.; Zhang, Y.; Ma, C.; Yu, H.; Hu, S. The early warning for thermal runaway of lithium-ion batteries based on internal and external temperature model. J. Energy Storage 2024, 83, 110690. [Google Scholar] [CrossRef]
- Bhatta, T.; Faruk, O.; Islam, M.R.; Kim, H.S.; Rana, S.S.; Pradhan, G.B.; Deo, A.; Kwon, D.S.; Yoo, I. Polymeric multilayered planar spring-based hybrid nanogenerator integrated with a self-powered vibration sensor for automotive vehicles IoT applications. Nano Energy 2024, 127, 109793. [Google Scholar] [CrossRef]
- Huang, M.; Long, K.; Luo, Y.; Li, J.; Su, C.; Gao, X.; Guo, S. Self-charging power module for multidirectional ultra-low frequency mechanical vibration monitoring and energy harvesting. Appl. Energy 2024, 361, 122855. [Google Scholar] [CrossRef]
- Saifi, S.; Xiao, X.; Cheng, S.; Guo, H.; Zhang, J.; Buschbaum, P.; Zhou, G.; Xu, X.; Cheng, H. An ultraflexible energy harvesting-storage system for wearable applications. Nat. Commun. 2024, 15, 6546. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Yin, G.; Sun, T.; Xu, X.; Rasool, G.; Abbas, K. Mechanical vibration energy harvesting and vibration monitoring based on triboelectric nanogenerators. Energy Technol. 2024, 12, 2300931. [Google Scholar] [CrossRef]
- Qi, L.; Song, J.; Wang, Y.; Yi, M.; Zhang, Z.; Yan, J. Mechanical motion rectification-based electromagnetic vibration energy harvesting technology: A review. Energy 2024, 289, 130030. [Google Scholar] [CrossRef]
- Sun, R.; Zhou, S.; Li, Z.; Cheng, L. Dual electromagnetic mechanisms with internal resonance for ultra-low frequency vibration energy harvesting. Appl. Energy 2024, 369, 123528. [Google Scholar] [CrossRef]
- Wakshume, D.G.; Płaczek, M.Ł. Optimizing piezoelectric energy harvesting from mechanical vibration for electrical efficiency: A comprehensive review. Electronics 2024, 13, 987. [Google Scholar] [CrossRef]
- Qi, C.; Wang, J.; Lyu, L.; Tan, L.; Zhang, J.; Li, G. Key issues in wireless transmission for NTN-assisted internet of things. IEEE IoT Mag. 2024, 7, 40–46. [Google Scholar] [CrossRef]
- Liu, C.; Du, Q.; Wu, J.; Zhang, G.; Shi, Y. Preparation of porous lead zirconate titanate piezoelectric ceramics via vat photopolymerization combined with burnt polymer spheres technique. Addit. Manuf. 2024, 91, 104326. [Google Scholar] [CrossRef]
- Zak, A.K.; Yazdi, S.T.; Abrishami, M.E.; Hashim, A.M. A review on piezoelectric ceramics and nanostructures: Fundamentals and fabrications. J. Aust. Ceram. Soc. 2024, 60, 723–753. [Google Scholar]
- Zang, X.; Xu, Z.; Zhu, C.; Peng, H.; Xia, Z.; Lu, H. Effect of positive electrode coverage ratio on SH0 mode in thickness-shear piezoelectric transducers. Sens. Actuators A Phys. 2025, 387, 116403. [Google Scholar] [CrossRef]
- Pang, B.; Wang, B.; Sun, Z.; Hao, Z. Torsional and lateral vibration analysis of wind turbine generator bearing outer ring fault considering unbalanced magnetic pull. Eng. Fail. Anal. 2024, 161, 108251. [Google Scholar] [CrossRef]
- Tian, R.; Cui, M.; Chen, G. A neural-symbolic network for interpretable fault diagnosis of rolling element bearings based on temporal logic. IEEE Trans. Instrum. Meas. 2024, 73, 3515614. [Google Scholar] [CrossRef]
- Wang, Y.; Du, H.; Yang, H.; Xi, Z.; Zhao, C.; Qiao, Z.; Chuai, X.; Peng, X.; Yu, H.; Zhang, Y.; et al. A rolling-mode triboelectric nanogenerator with multi-tunnel grating electrodes and opposite-charge-enhancement for wave energy harvesting. Nat. Commun. 2024, 15, 6834. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Outer diameter | 49.4 mm |
| Inner diameter | 19.5 mm |
| Thickness | 5 mm |
| Number of balls | 10 |
| Diameter of rolling ball | 2.4 mm |
| Pitch diameter | 14.5 mm |
| Parameters | Value |
|---|---|
| Model | Xuansn XE1 |
| Rated voltage | 2.5 V |
| Temperature range | −55 °C to +105 °C |
| Feature | Solid-state capacitor |
| Different Conditions | Value | Fixed Test Condition | Average Efficiency |
|---|---|---|---|
| Three capacitor values | 10 μF | 4000 rpm | 7.43% |
| 56 μF | 6.87% | ||
| 270 μF | 5.96% | ||
| Four rotating speeds | 1000 rpm | 270 μF | 4.21% |
| 2000 rpm | 5.13% | ||
| 3000 rpm | 5.97% | ||
| 4000 rpm | 6.76% |
| Rotational Speed | Bearing Fault Frequency | Value |
|---|---|---|
| 1000 rpm | BPFO | 48.8 Hz |
| BPFI | 69.3 Hz | |
| BSF | 96.8 Hz | |
| SF | 16.7 Hz | |
| 2000 rpm | BPFO | 97.9 Hz |
| BPFI | 139.1 Hz | |
| BSF | 194.2 Hz | |
| SF | 33.3 Hz | |
| 3000 rpm | BPFO | 147.2 Hz |
| BPFI | 208.6 Hz | |
| BSF | 291.7 Hz | |
| SF | 50 Hz | |
| 4000 rpm | BPFO | 196.0 Hz |
| BPFI | 278.2 Hz | |
| BSF | 388.7 Hz | |
| SF | 66.7 Hz |
| Feature | Proposed System | External Vibration Sensor | Battery-Powered Internal Sensor |
|---|---|---|---|
| Power Source | Self-powered | External power | Battery-powered |
| Installation | Internal mounting | External mounting | Internal mounting |
| Signal fidelity | Direct vibration source (SNR > 40 dB) | Attenuated signals (SNR < 20 dB) | Moderate SNR (25–30 dB) |
| Operational lifetime | Theoretically infinite | Theoretically infinite | Battery life |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Long, H.; Song, D.; Shariar, H. Energy Harvesting Microelectromechanical System for Condition Monitoring Based on Piezoelectric Transducer Ring. Micromachines 2025, 16, 602. https://doi.org/10.3390/mi16060602
Wang K, Long H, Song D, Shariar H. Energy Harvesting Microelectromechanical System for Condition Monitoring Based on Piezoelectric Transducer Ring. Micromachines. 2025; 16(6):602. https://doi.org/10.3390/mi16060602
Chicago/Turabian StyleWang, Kaixuan, Hao Long, Di Song, and Hasan Shariar. 2025. "Energy Harvesting Microelectromechanical System for Condition Monitoring Based on Piezoelectric Transducer Ring" Micromachines 16, no. 6: 602. https://doi.org/10.3390/mi16060602
APA StyleWang, K., Long, H., Song, D., & Shariar, H. (2025). Energy Harvesting Microelectromechanical System for Condition Monitoring Based on Piezoelectric Transducer Ring. Micromachines, 16(6), 602. https://doi.org/10.3390/mi16060602