
Extreme Ultraviolet Multilayer Defect Profile Parameters Reconstruction via Transfer Learning with Fine-Tuned VGG-16

 ,
, 
Abstract

1. Introduction
2. Theoretical Model
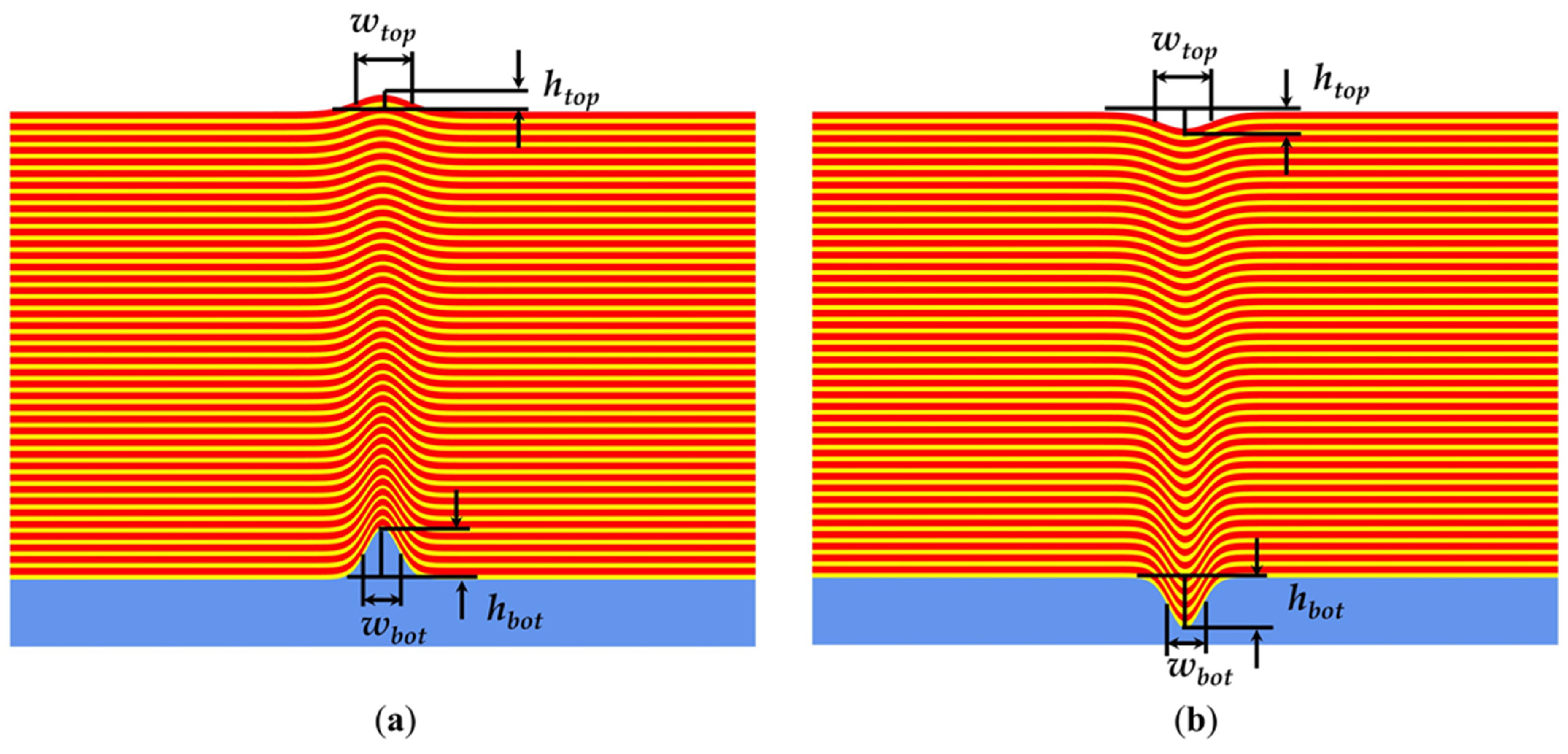
2.1. Reflected Field Intensity Simulation from a Defective Blank Mask
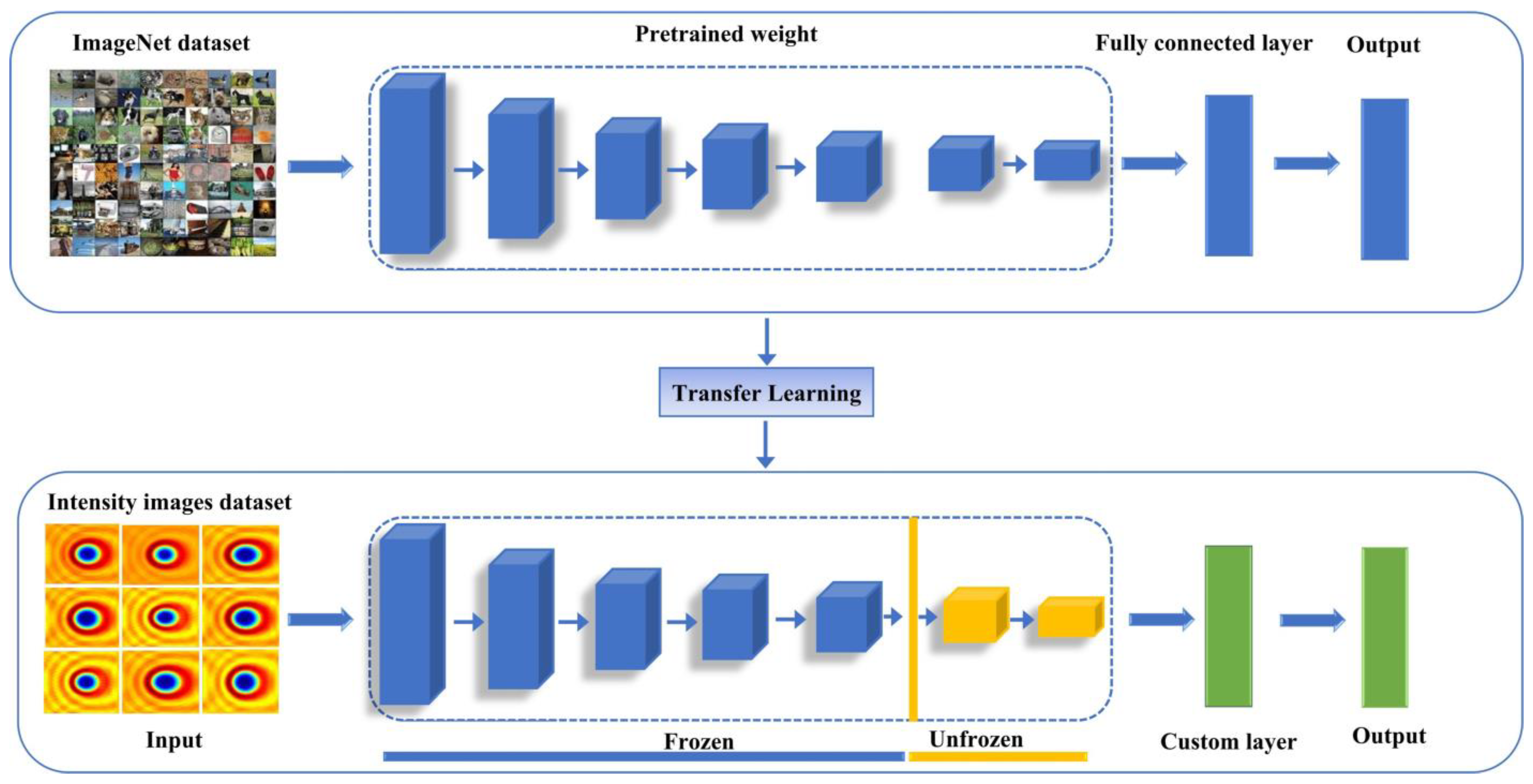
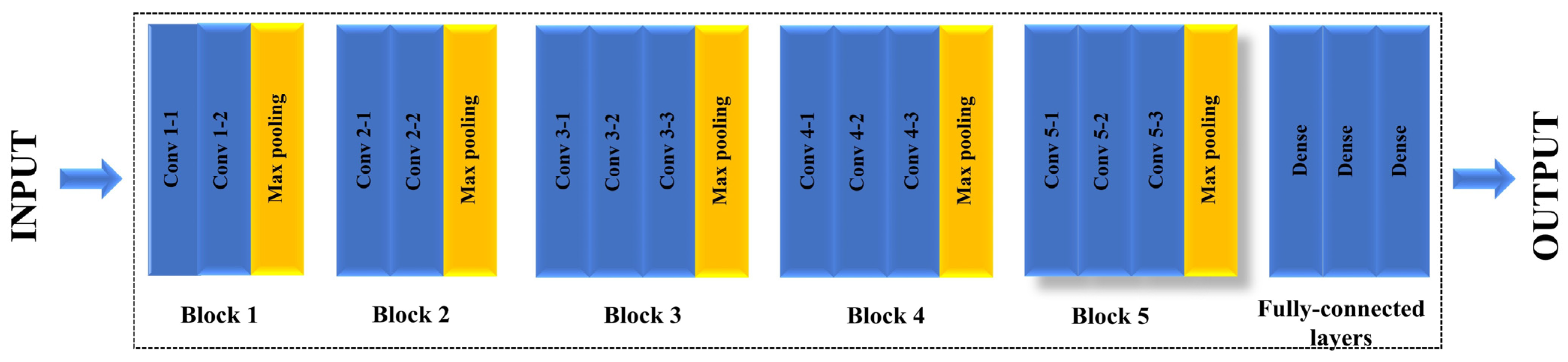
2.2. Transfer Learning with Fine-Tuning
2.3. Defect Profile Parameters Reconstruction Model
3. Results and Discussion
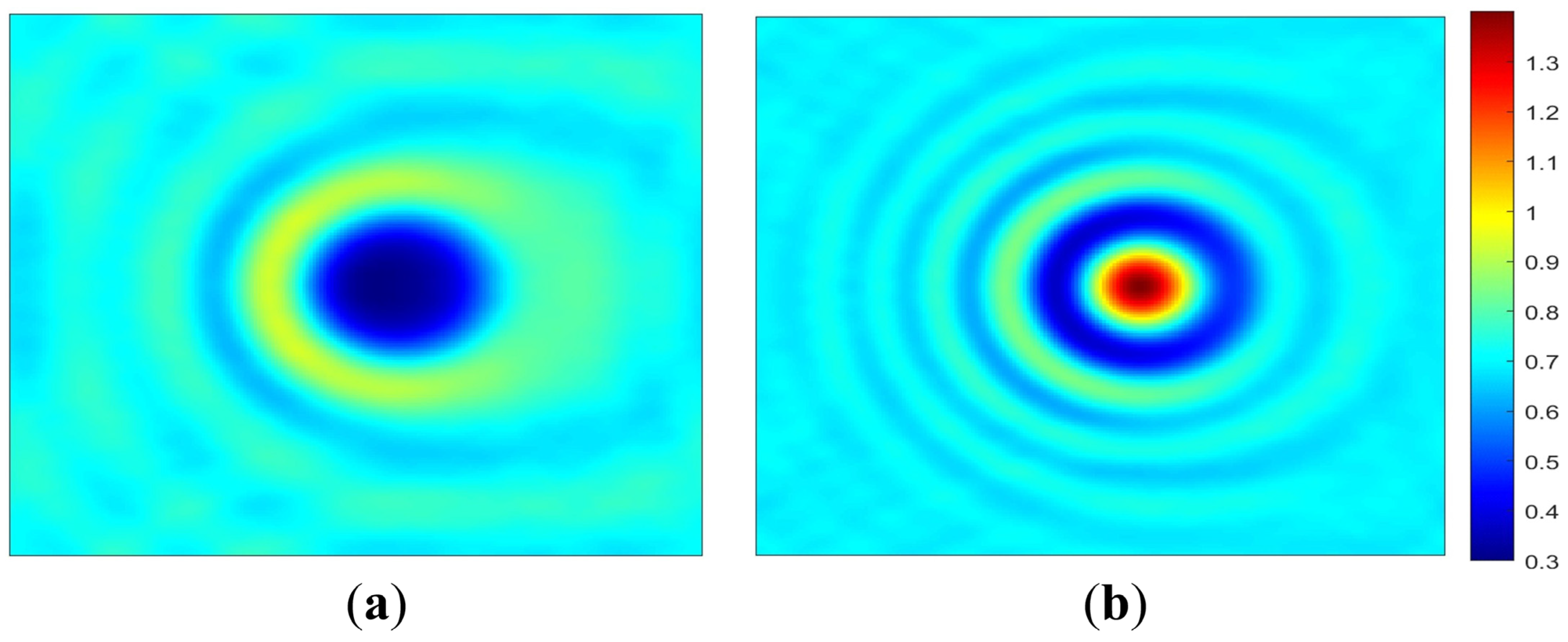
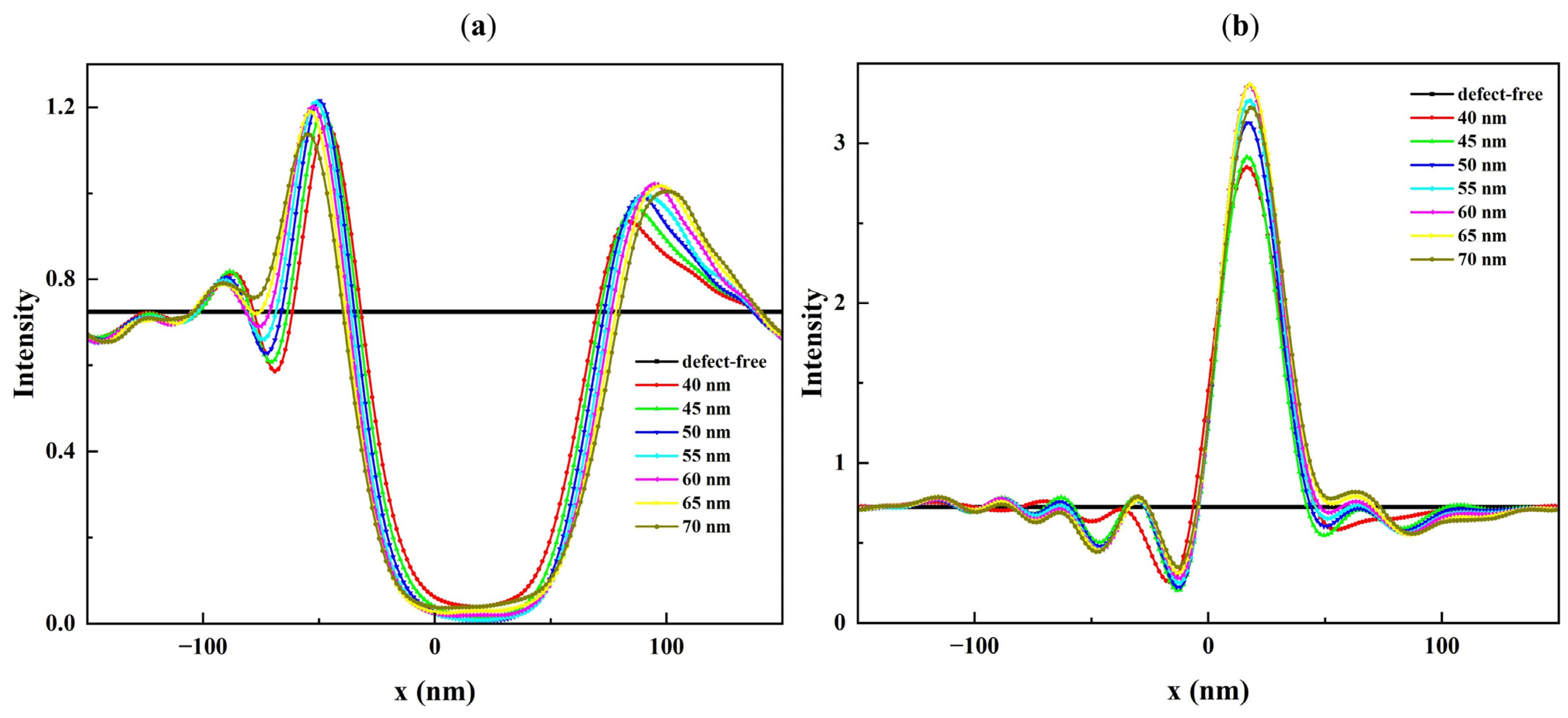
3.1. Analysis of the Reflected Field Intensity Images
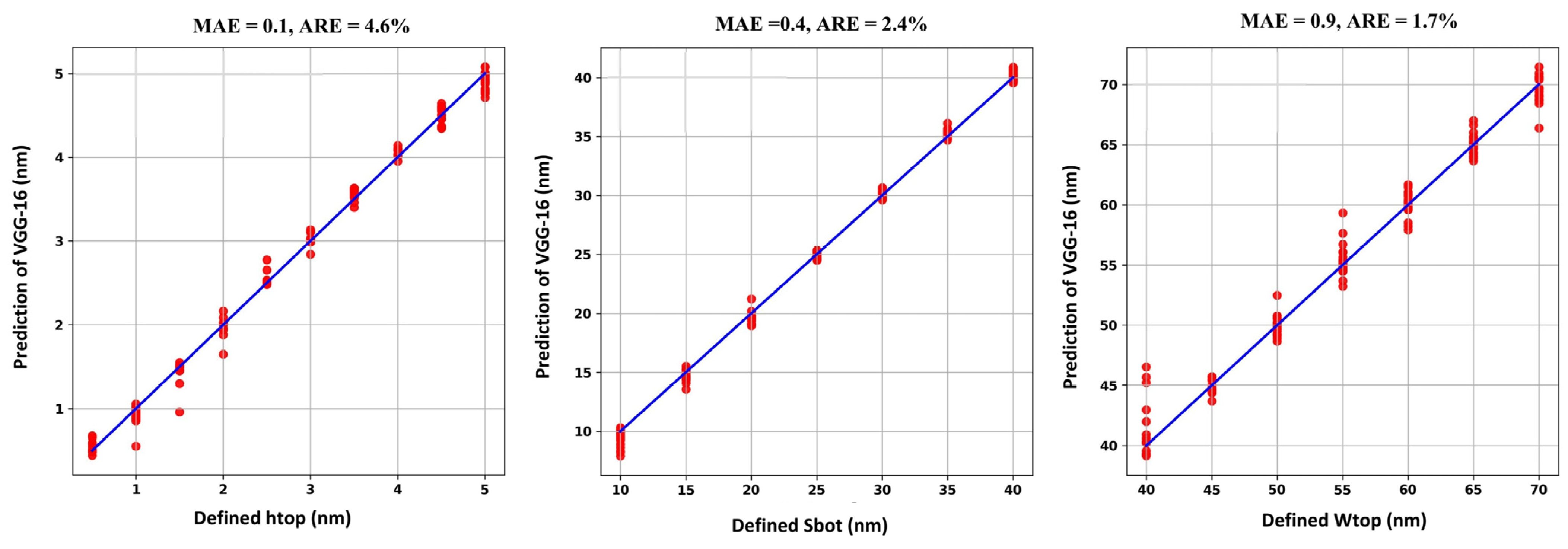
3.2. Model Performance Evaluation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, J.; Dong, L.; Fan, T.; Ma, X.; Chen, R.; Wei, Y. Fast Extreme Ultraviolet Lithography Mask Near-Field Calculation Method Based on Machine Learning. Appl. Opt. 2020, 59, 2829–2838. [Google Scholar] [CrossRef] [PubMed]
- Mirkarimi, P.B.; Spiller, E.; Baker, S.L.; Sperry, V.; Stearns, D.G.; Gullikson, E.M. Developing a Viable Multilayer Coating Process for Extreme Ultraviolet Lithography Reticles. J. Microlithogr. Microfabr. Microsyst. 2004, 3. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, Y.; Chen, R.; Dong, L.; Wu, R.; Gai, T.; Ma, L.; Su, Y.; Wei, Y. EUV Multilayer Defect Characterization via Cycle-Consistent Learning. Opt. Express 2020, 28, 18493. [Google Scholar] [CrossRef] [PubMed]
- Mirkarimi, P.B.; Stearns, D.G.; Baker, S.L.; Elmer, J.W.; Sweeney, D.W.; Gullikson, E.M. Method for Repairing Mo/Si Multilayer Thin Film Phase Defects in Reticles for Extreme Ultraviolet Lithography. J. Appl. Phys. 2002, 91, 81–89. [Google Scholar] [CrossRef]
- Yamane, T.; Watanabe, H. Application of EUV Dark Field Image for EUVL Mask Fabrication. In Proceedings of the Photomask Japan 2017: XXIV Symposium on Photomask and Next-Generation Lithography Mask Technology, Yokohama, Japan, 5–7 April 2017; Volume 10454. [Google Scholar]
- Stearns, D.G.; Mirkarimi, P.B.; Spiller, E. Localized Defects in Multilayer Coatings. Thin Solid Films 2004, 446, 37–49. [Google Scholar] [CrossRef]
- Woldeamanual, D.S.; Erdmann, A.; Maier, A. Application of Deep Learning Algorithms for Lithographic Mask Characterization. In Proceedings of the Computational Optics II, Frankfurt, Germany, 14–17 May 2018. [Google Scholar]
- Peng, X.; Xu, S.; Zhao, Y. EUV Photomask Defect Detection Based on Image Segmentation. In Proceedings of the Third International Conference on Optics and Image Processing (ICOIP 2023), Hangzhou, China, 14–16 April 2023. [Google Scholar] [CrossRef]
- Nagata, Y.; Harada, T.; Watanabe, T.; Kinoshita, H.; Midorikawa, K. At Wavelength Coherent Scatterometry Microscope Using High-Order Harmonics for EUV Mask Inspection. Int. J. Extrem. Manuf. 2019, 1, 032001. [Google Scholar] [CrossRef]
- Miyai, H.; Suzuki, T.; Takehisa, K.; Kusunose, H.; Yamane, T.; Terasawa, T.; Watanabe, H.; Mori, I. The Capability of High Magnification Review Function for EUV Actinic Blank Inspection Tool. In Proceedings of the Photomask and Next-Generation Lithography Mask Technology XX, Yokohama, Japan, 16–18 April 2013; Volume 8701, pp. 305–356. [Google Scholar] [CrossRef]
- Yan, P.-Y.; Liu, Y.; Kamna, M.; Zhang, G.; Chen, R.; Martinez, F. EUVL Multilayer Mask Blank Defect Mitigation for Defect-Free EUVL Mask Fabrication. In Proceedings of the Extreme Ultraviolet (EUV) Lithography III, San Jose, CA, USA, 12–16 February 2012; Volume 8322. [Google Scholar]
- Jonckheere, R. Overcoming EUV Mask Blank Defects: What We Can, and What We Should. In Proceedings of the Photomask Japan 2017: XXIV Symposium on Photomask and Next-Generation Lithography Mask Technology, Yokohama, Japan, 5–7 April 2017; Volume 10454. [Google Scholar]
- Barty, A.; Mirkarimi, P.B.; Stearns, D.G.; Sweeney, D.W.; Chapman, H.N.; Clift, W.M.; Hector, S.D.; Yi, M. EUVL Mask Blank Repair. In Proceedings of the Emerging Lithographic Technologies VI, Santa Clara, CA, USA, 3–8 March 2002; Volume 4688. [Google Scholar]
- Bhamidipati, S.; Paninjath, S.; Pereira, M.; Buck, P. Automatic Classification and Accurate Size Measurement of Blank Mask Defects. In Proceedings of the Photomask Japan 2015: Photomask and Next-Generation Lithography Mask Technology XXII, Yokohama, Japan, 20–22 April 2015; Volume 9658. [Google Scholar]
- Harada, T.; Tanaka, Y.; Watanabe, T.; Kinoshita, H.; Usui, Y.; Amano, T. Phase Defect Characterization on an Extreme-Ultraviolet Blank Mask Using Microcoherent Extreme-Ultraviolet Scatterometry Microscope. J. Vac. Sci. Technol. B Nanotechnol. Microelectron. Mater. Process. Meas. Phenom. 2013, 31, 06F605. [Google Scholar] [CrossRef]
- Harada, T.; Hashimoto, H.; Amano, T.; Kinoshita, H.; Watanabe, T. Phase Imaging Results of Phase Defect Using Micro-Coherent Extreme Ultraviolet Scatterometry Microscope. J. Micro/Nanolithogr. MEMS MOEMS 2016, 15, 021007. [Google Scholar] [CrossRef]
- Cheng, W.; Li, S.; Wang, X.; Zhang, Z. Extreme Ultraviolet Phase Defect Characterization Based on Complex Amplitudes of the Aerial Images. Appl. Opt. 2021, 60, 5208. [Google Scholar] [CrossRef]
- Kwon, H.J.; Harris-Jones, J.; Teki, R.; Cordes, A.; Nakajima, T.; Mochi, I.; Goldberg, K.A.; Yamaguchi, Y.; Kinoshita, H. Printability of Native Blank Defects and Programmed Defects and Their Stack Structures. In Proceedings of the Photomask Technology 2011, Monterey, CA, USA, 19–22 September 2011; Volume 8166. [Google Scholar]
- Tolani, V.; Satake, M.; Hu, P.; Peng, D.; Li, Y.; Kim, D.; Pang, L. EUV Mask Absorber and Multi-Layer Defect Disposition Techniques Using Computational Lithography. In Proceedings of the Photomask Technology 2011, Monterey, CA, USA, 19–22 September 2011; Volume 8166. [Google Scholar]
- Zheng, H.; Li, S.; Cheng, W.; Yuan, S.; Wang, X. Phase Defect Characterization Using Generative Adversarial Networks for Extreme Ultraviolet Lithography. Appl. Opt. 2023, 62, 1243. [Google Scholar] [CrossRef]
- Pang, L.; Satake, M.; Li, Y.; Hu, P.; Peng, D.; Chen, D.; Tolani, V. EUV Multilayer Defect Compensation (MDC) by Absorber Pattern Modification, Film Deposition, and Multilayer Peeling Techniques. In Proceedings of the Extreme Ultraviolet (EUV) Lithography IV, San Jose, CA, USA, 24–28 February 2013; Volume 8679. [Google Scholar]
- Upadhyaya, M.; Basavalingappa, A.; Herbol, H.; Denbeaux, G.; Jindal, V.; Harris-Jones, J.; Jang, I.-Y.; Goldberg, K.A.; Mochi, I.; Marokkey, S.; et al. Level-Set Multilayer Growth Model for Predicting Printability of Buried Native Extreme Ultraviolet Mask Defects. J. Vac. Sci. Technol. B Nanotechnol. Microelectron. Mater. Process. Meas. Phenom. 2015, 33, 021602. [Google Scholar] [CrossRef]
- Jindal, V.; Kearney, P.; Harris-Jones, J.; Hayes, A.; Kools, J. Modeling the EUV Multilayer Deposition Process on EUV Blanks. Extrem. Ultrav. Lithogr. II 2011, 7969, 79691A. [Google Scholar] [CrossRef]
- Xu, D.; Evanschitzky, P.; Erdmann, A. Extreme Ultraviolet Multilayer Defect Analysis and Geometry Reconstruction. J. Micro/Nanolithogr. MEMS MOEMS 2016, 15, 014002. [Google Scholar] [CrossRef]
- Dorrer, C.; Zuegel, J.D. Optical Testing Using the Transport-of-Intensity Equation. Opt. Express 2007, 15, 7165–7175. [Google Scholar] [CrossRef]
- Nugent, K.A.; Gureyev, T.E.; Cookson, D.F.; Paganin, D.; Barnea, Z. Quantitative Phase Imaging Using Hard X Rays. Phys. Rev. Lett. 1996, 77, 2961. [Google Scholar] [CrossRef]
- Dou, J.; Gao, Z.; Yang, Z.; Yuan, Q.; Ma, J. EUV Multilayer Defects Reconstruction Based on the Transport of Intensity Equation and Partial Least-Square Regression. In Proceedings of the International Conference on Optical and Photonics Engineering (icOPEN 2016), Chengdu, China, 26–30 September 2016; Volume 10250. [Google Scholar]
- Kartnaller, V.; Junior, I.I.; de Souza, A.V.A.; Costa, I.C.R.; Rezende, M.J.C.; da Silva, J.F.C.; de Souza, R.O.M.A. Evaluating the Kinetics of the Esterification of Oleic Acid with Homo and Heterogeneous Catalysts Using In-Line Real-Time Infrared Spectroscopy and Partial Least Squares Calibration. J. Mol. Catal. B Enzym. 2016, 123, 41–46. [Google Scholar] [CrossRef]
- Li, J.; Li, B.; Zhao, Z.; Xie, Z.; Song, X.; Lin, J. Three-Dimensional Characterization of EUV Mask Blank Defects with Photoemission Electron Microscopy Assisted by Neural Network Transfer Learning. Appl. Opt. 2025, 64, 1376–1387. [Google Scholar] [CrossRef]
- Tammina, S. Transfer Learning Using VGG-16 with Deep Convolutional Neural Network for Classifying Images. Int. J. Sci. Res. Publ. 2019, 9, 143–150. [Google Scholar] [CrossRef]
- Upadhyaya, M.; Jindal, V.; Basavalingappa, A.; Herbol, H.; Harris-Jones, J.; Jang, I.-Y.; Goldberg, K.A.; Mochi, I.; Marokkey, S.; Demmerle, W.; et al. Evaluating Printability of Buried Native EUV Mask Phase Defects through a Modeling and Simulation Approach. In Proceedings of the Extreme Ultraviolet (EUV) Lithography VI, San Jose, CA, USA, 22–26 February 2015; Volume 9422. [Google Scholar]
- Li, H.; Wei, Z.; Zhang, J.; Cheng, X.; Wang, Z. Anomalous Light Scattering from Multilayer Coatings with Nodular Defects. Opt. Express 2022, 30, 5414. [Google Scholar] [CrossRef]
- Evanschitzky, P.; Auth, N.; Heil, T.; Hermanns, C.F.; Erdmann, A. Mask Defect Detection with Hybrid Deep Learning Network. J. Micro/Nanopatterning Mater. Metrol. 2021, 20, 041205. [Google Scholar] [CrossRef]
- Safonova, A.; Ghazaryan, G.; Stiller, S.; Main-Knorn, M.; Nendel, C.; Ryo, M. Ten Deep Learning Techniques to Address Small Data Problems with Remote Sensing. Int. J. Appl. Earth Obs. Geoinf. 2023, 125, 103569. [Google Scholar] [CrossRef]
- gifani, P.; Shalbaf, A.; Vafaeezadeh, M. Automated Detection of COVID-19 Using Ensemble of Transfer Learning with Deep Convolutional Neural Network Based on CT Scans. Int. J. Comput. Assist. Radiol. Surg. 2021, 16, 115–123. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Li, M.; Watanabe, Y.; Kimura, T.; Matsunawa, T.; Nojima, S.; Pan, D.Z. Data Efficient Lithography Modeling with Transfer Learning and Active Data Selection. IEEE Trans. Comput. Des. Integr. Circuits Syst. 2019, 38, 1900–1913. [Google Scholar] [CrossRef]
- Vrbančič, G.; Podgorelec, V. Transfer Learning with Adaptive Fine-Tuning. IEEE Access 2020, 8, 196197–196211. [Google Scholar] [CrossRef]
- Noori, W.E.; Albahri, A.S. Towards Trustworthy Myopia Detection: Integration Methodology of Deep Learning Approach, XAI Visualization, and User Interface System. Appl. Data Sci. Anal. 2023, 2023, 1–15. [Google Scholar] [CrossRef]
- Guo, Y.; Shi, H.; Kumar, A.; Grauman, K.; Rosing, T.; Feris, R. Spottune: Transfer Learning through Adaptive Fine-Tuning. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Kora, P.; Ooi, C.P.; Faust, O.; Raghavendra, U.; Gudigar, A.; Chan, W.Y.; Meenakshi, K.; Swaraja, K.; Plawiak, P.; Acharya, U.R. Transfer Learning Techniques for Medical Image Analysis: A Review. Biocybern. Biomed. Eng. 2022, 42, 79–107. [Google Scholar] [CrossRef]
- Azizpour, H.; Razavian, A.S.; Sullivan, J.; Maki, A.; Carlsson, S. Factors of Transferability for a Generic ConvNet Representation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1790–1802. [Google Scholar] [CrossRef]
- Mogan, J.N.; Lee, C.P.; Lim, K.M.; Muthu, K.S. VGG16-MLP: Gait Recognition with Fine-Tuned VGG-16 and Multilayer Perceptron. Appl. Sci. 2022, 12, 7639. [Google Scholar] [CrossRef]
- Yang, H.; Ni, J.; Gao, J.; Han, Z.; Luan, T. A Novel Method for Peanut Variety Identification and Classification by Improved VGG16. Sci. Rep. 2021, 11, 15756. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015—Conference Track Proceedings, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Loc, C.V.; Burie, J.C.; Ogier, J.M. Document Images Watermarking for Security Issue Using Fully Convolutional Networks. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018. [Google Scholar]
- Yu, H.; Lin, S.; Zhou, H.; Weng, X.; Chu, S.; Yu, T. Leak Detection in Water Distribution Networks Based on Deep Learning and Kriging Interpolation Method. AQUA Water Infrastruct. Ecosyst. Soc. 2024, 73, 1741–1753. [Google Scholar] [CrossRef]
- Yang, L.; Xu, S.; Yu, X.; Long, H.; Zhang, H.; Zhu, Y. A New Model Based on Improved VGG16 for Corn Weed Identification. Front. Plant Sci. 2023, 14, 1205151. [Google Scholar] [CrossRef] [PubMed]
- Hsiao, T.Y.; Chang, Y.C.; Chou, H.H.; Chiu, C. Te Filter-Based Deep-Compression with Global Average Pooling for Convolutional Networks. J. Syst. Archit. 2019, 95, 9–18. [Google Scholar] [CrossRef]
- Park, S.; Kwak, N. Analysis on the Dropout Effect in Convolutional Neural Networks. In Computer Vision—ACCV 2016; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2017; Volume 10112. [Google Scholar]
- Desai, C. Impact of Weight Initialization Techniques on Neural Network Efficiency and Performance: A Case Study with MNIST Dataset. Int. J. Eng. Comput. Sci. 2024, 13, 26115–26120. [Google Scholar] [CrossRef]
- Demir-Kavuk, O.; Kamada, M.; Akutsu, T.; Knapp, E.W. Prediction Using Step-Wise L1, L2 Regularization and Feature Selection for Small Data Sets with Large Number of Features. BMC Bioinform. 2011, 12, 412. [Google Scholar] [CrossRef]
- Birba, E.D. A Comparative Study of Data Splitting Algorithms for Machine Learning Model Selection. Degree Proj. Comput. Sci. Eng. 2020, 2020, 1–23. [Google Scholar]
- Huh, S.; Rastegar, A.; Wurm, S.; Goldberg, K.; Mochi, I.; Nakajima, T.; Kishimoto, M.; Komakine, M. Study of Real Defects on EUV Blanks and a Strategy for EUV Mask Inspection. In Proceedings of the 26th European Mask and Lithography Conference, Grenoble, France, 18–20 January 2010; Volume 7545. [Google Scholar]
- García-Córdova, J.Z.; Arano-Martinez, J.A.; Mercado-Zúñiga, C.; Martínez-González, C.L.; Torres-Torres, C. Predicting the Multiphotonic Absorption in Graphene by Machine Learning. AI 2024, 5, 2203–2217. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Parameter | Value |
|---|---|---|
| Simulation region | Size | 300 × 300 nm |
| Mesh size | ∆x = 1.5 nm, ∆y = 0.25 nm, ∆z = 1.5 nm | |
| Illumination | Angle | 6° |
| Polarization | TE-polarized | |
| Direction | Negative y-axis | |
| Wavelength | 13.5 nm | |
| Mask blank | Number of bilayers | 40 bilayers of Mo and Si |
| Mo-Si thickness | 4.17 nm thick Si, 2.78 nm thick Mo | |
| substrate thickness | 50 nm thick SiO2 | |
| Mo-Si properties | For Si: n = 0.999, K = 0.00182 For Mo: n = 0.923, K = 0.00622 |
| Defect Type | Batch Size | Epochs | Dropout Rate | Learning Rate | Regularization Factor | |
|---|---|---|---|---|---|---|
| Bump | htop | 10 | 150 | 0.2 | 0.000020 | 0.025 |
| wtop | ″ | ″ | ″ | 0.000025 | 0.030 | |
| Sbot | ″ | ″ | ″ | 0.000025 | 0.010 | |
| Pit | htop | ″ | ″ | ″ | 0.000020 | 0.025 |
| wtop | ″ | ″ | ″ | 0.000025 | 0.025 | |
| Sbot | ″ | ″ | ″ | 0.000020 | 0.025 | |
| Defect Type | htop | Wtop | Sbot | |||
|---|---|---|---|---|---|---|
| MAE (nm) | ARE (%) | MAE (nm) | ARE (%) | MAE (nm) | ARE (%) | |
| Bump | 0.1 | 4.6 | 0.9 | 1.7 | 0.4 | 2.4 |
| Pit | 0.1 | 4.9 | 1.1 | 2.1 | 0.4 | 2.2 |
| Approach | Data Type | Dataset Size per Defect Type | Training Time (s) | Accuracy (ARE %) | Data Collection Requirements |
|---|---|---|---|---|---|
| CNN + cycle-consistent learning + inception module [3] | Aerial images | 2000 for bump | 2160 | 3.02% | No |
| Fourier ptychographic imaging (FPI) + DRN [17] | Aerial images | 5120 for bump 5120 for pit | // | ~ 2.1% for bump ~ 1.9% for pit | Yes |
| DRN + GANs [20] | Aerial images | 5120 for bump 5120 for pit | 3976 | 1.37% for bump 1.39% for pit | Yes |
| ResNet-18 [29] | EUV-PEEM | 360 for bump 360 for pit | ∼900 | 1.37% for bump 1.39% for pit | Yes |
| VGG-16 (this work) | Intensity images | 490 for bump 490 for pit | 720 | 2.9% for bump 3.06% for pit | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammad, H.; Li, J.; Li, B.; Baraya, J.T.; Kone, S.; Zhao, Z.; Song, X.; Lin, J. Extreme Ultraviolet Multilayer Defect Profile Parameters Reconstruction via Transfer Learning with Fine-Tuned VGG-16. Micromachines 2025, 16, 541. https://doi.org/10.3390/mi16050541
Mohammad H, Li J, Li B, Baraya JT, Kone S, Zhao Z, Song X, Lin J. Extreme Ultraviolet Multilayer Defect Profile Parameters Reconstruction via Transfer Learning with Fine-Tuned VGG-16. Micromachines. 2025; 16(5):541. https://doi.org/10.3390/mi16050541
Chicago/Turabian StyleMohammad, Hala, Jiawei Li, Bochao Li, Jamilu Tijjani Baraya, Sana Kone, Zhenlong Zhao, Xiaowei Song, and Jingquan Lin. 2025. "Extreme Ultraviolet Multilayer Defect Profile Parameters Reconstruction via Transfer Learning with Fine-Tuned VGG-16" Micromachines 16, no. 5: 541. https://doi.org/10.3390/mi16050541
APA StyleMohammad, H., Li, J., Li, B., Baraya, J. T., Kone, S., Zhao, Z., Song, X., & Lin, J. (2025). Extreme Ultraviolet Multilayer Defect Profile Parameters Reconstruction via Transfer Learning with Fine-Tuned VGG-16. Micromachines, 16(5), 541. https://doi.org/10.3390/mi16050541