
Design, Fabrication, and Application of Large-Area Flexible Pressure and Strain Sensor Arrays: A Review


Abstract
1. Introduction
2. Preparation Process of Flexible Sensors
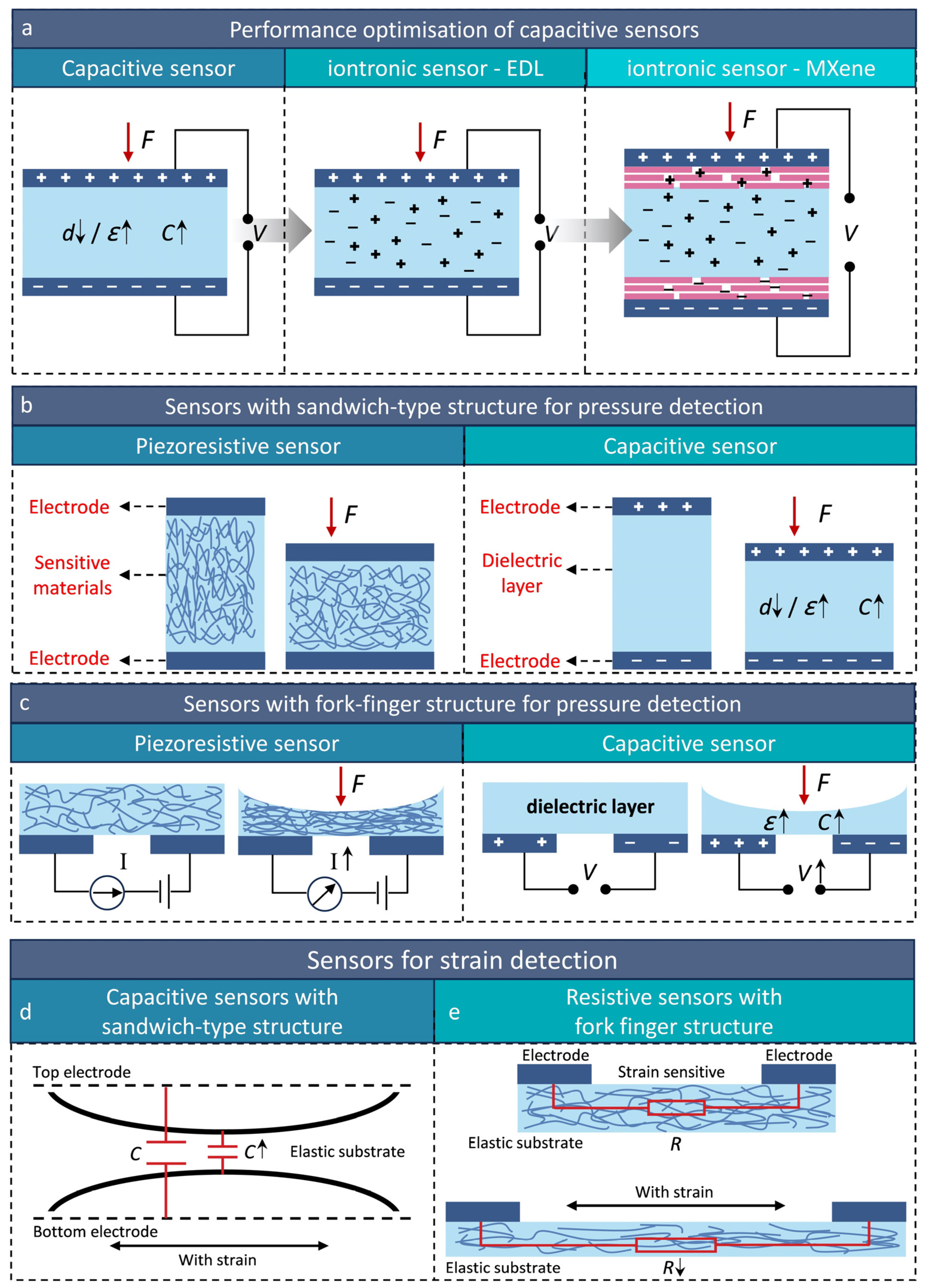
3. Mechanism of Flexible Sensors
4. Common Materials for Flexible Sensors
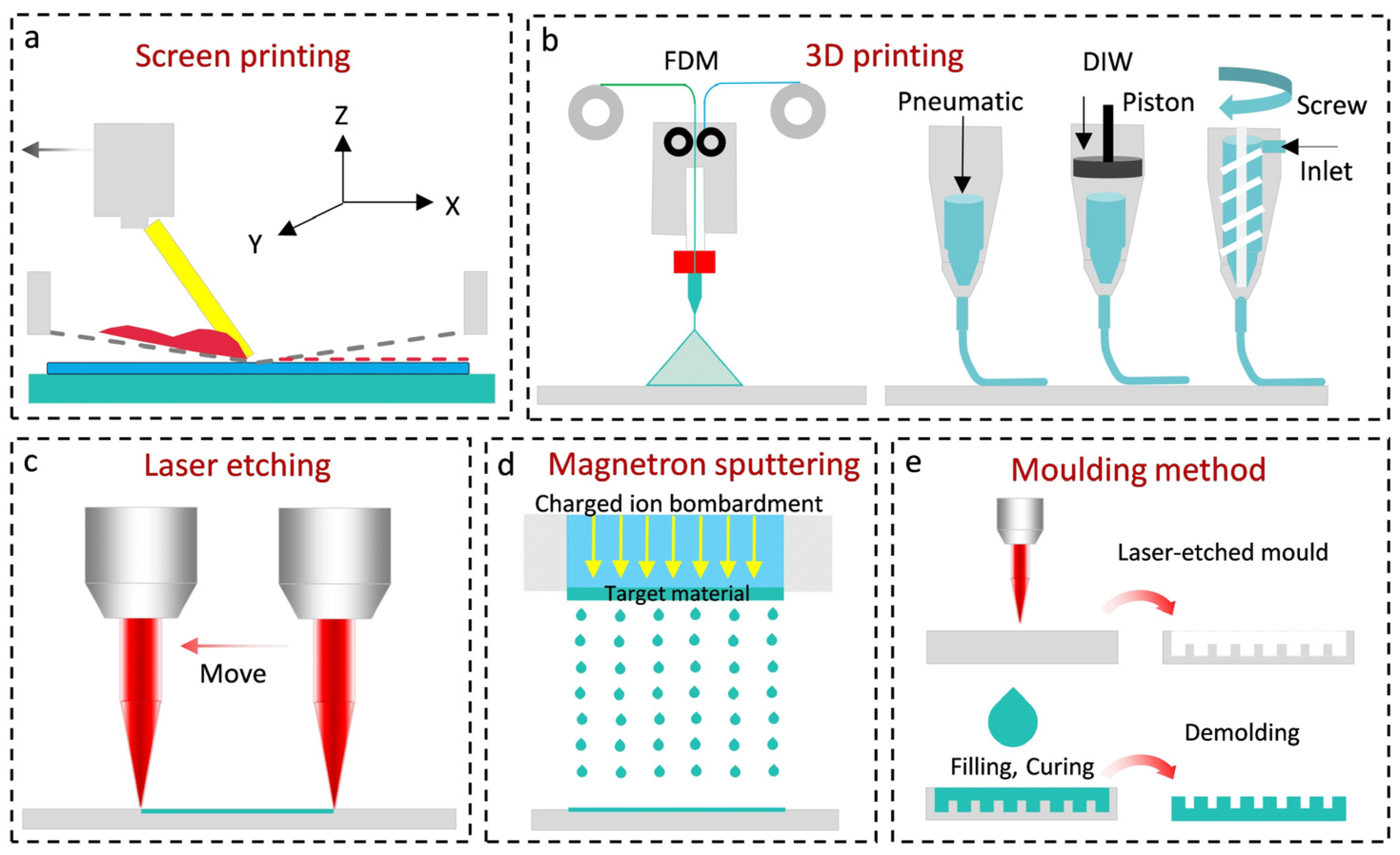
5. Typical Preparation Process of Flexible Sensors
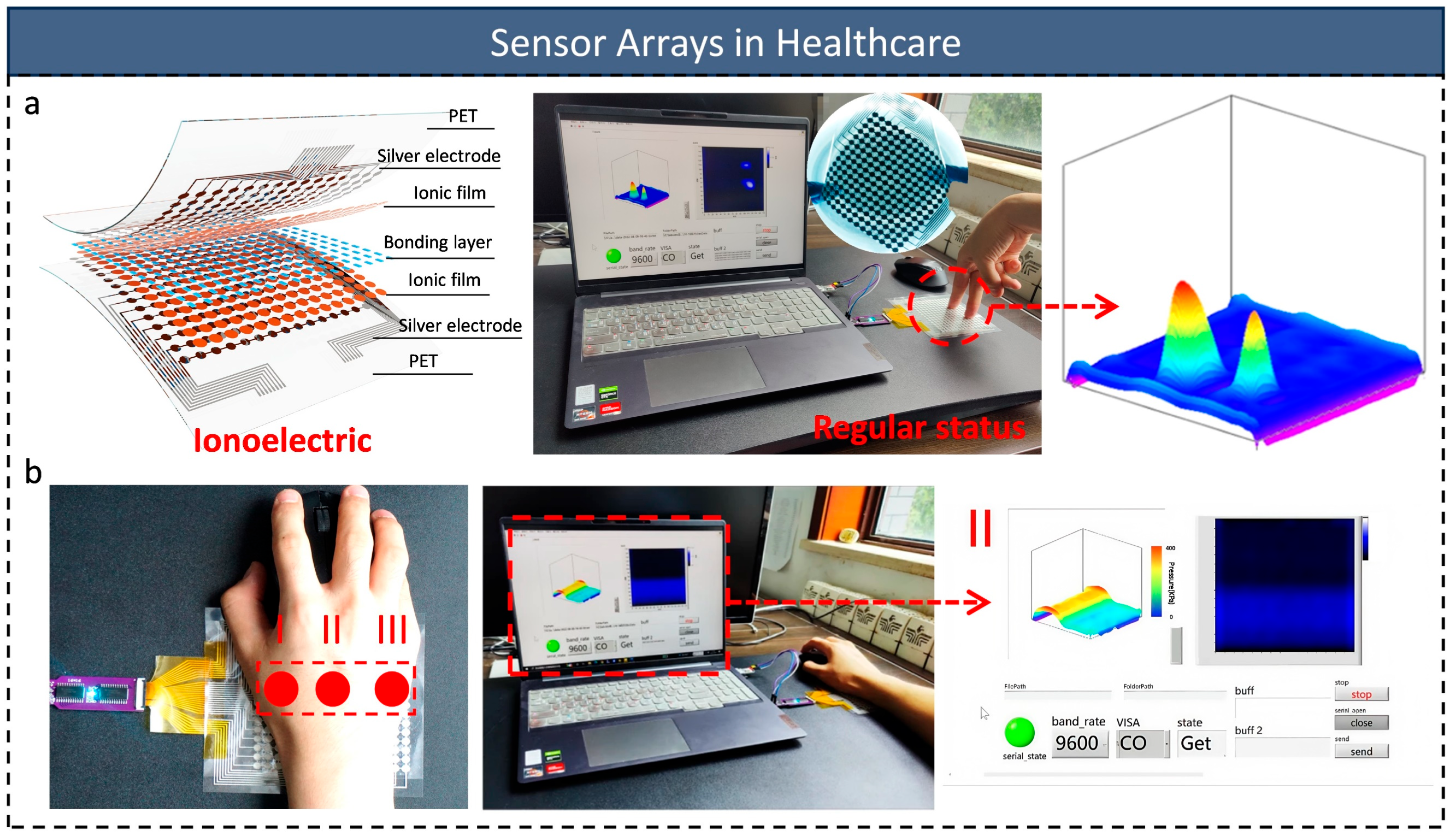
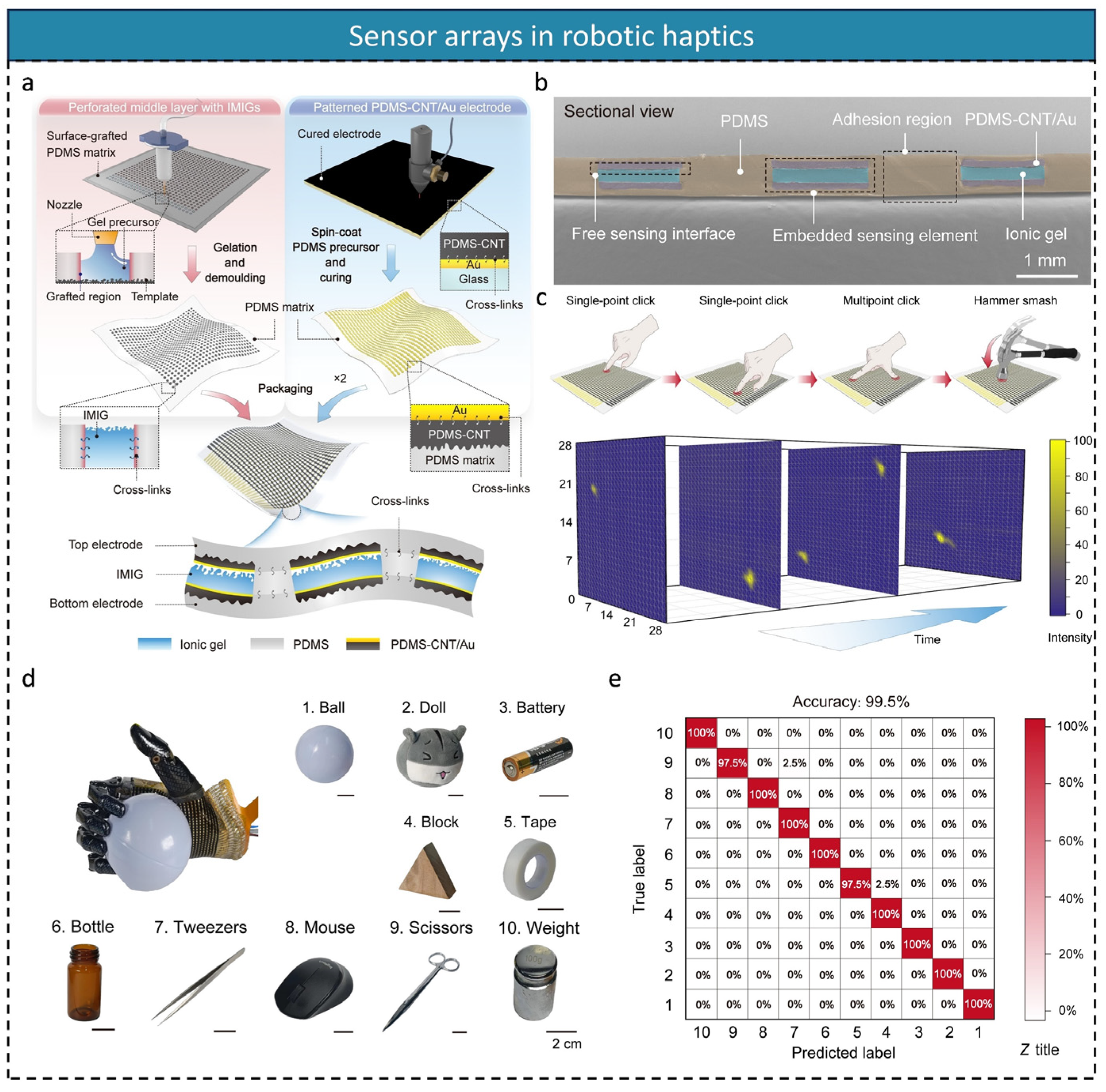
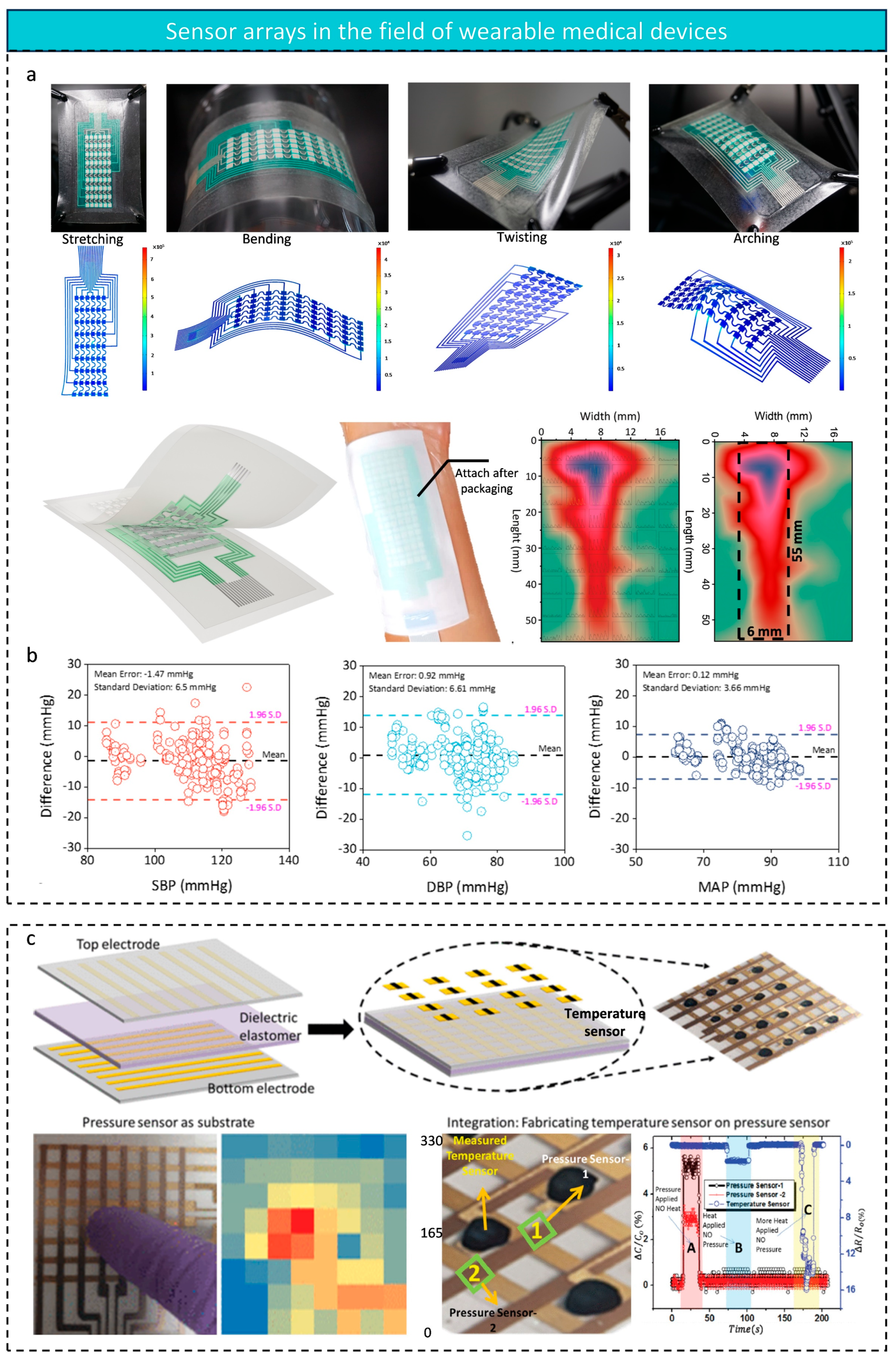
6. Typical Applications of Large-Area Pressure-Based Sensor Arrays
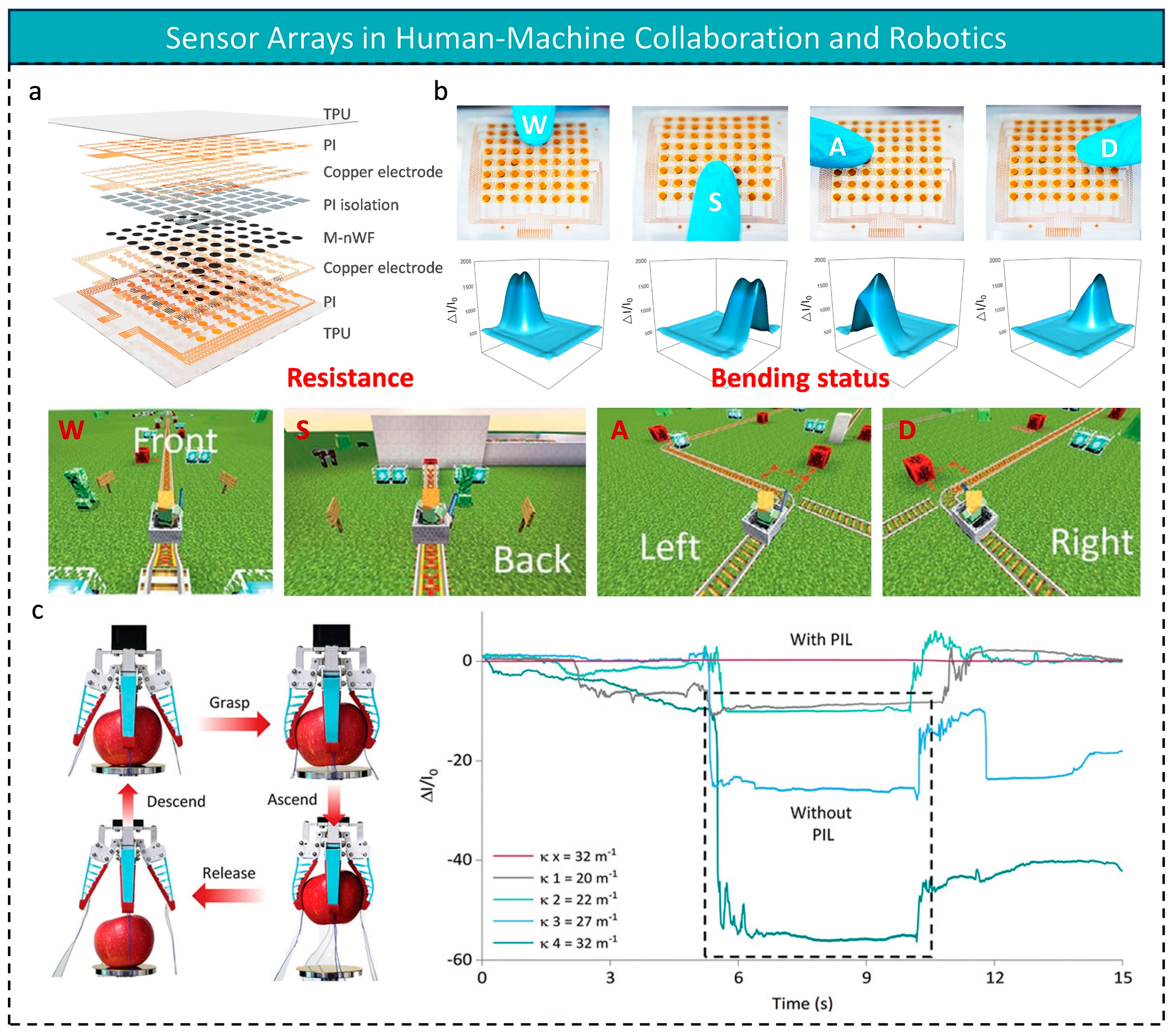
7. Common Applications of Large-Area Strain Sensor Arrays
8. Conclusions and Perspectives
- (1)
- Mass Production Feasibility
- (2)
- Wireless Integration
- (3)
- Real-Time Data Processing
- (4)
- Long-Term Stability and Environmental Adaptability
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, X.; Zhang, Z.; Chen, X.; Wang, F.; Shu, L.; Xu, X.; Tao, X. High-Resolution, High-Speed and Low-Cost Flexible Tactile Sensor Array System. Measurement 2025, 241, 115630. [Google Scholar] [CrossRef]
- Wang, T.; Shang, X.; Wang, H.; Wang, J.; Zhang, C. Porous Nanofibers and Micro-Pyramid Structures Array for High-Performance Flexible Pressure Sensors. Compos. Part A Appl. Sci. Manuf. 2024, 181, 108163. [Google Scholar] [CrossRef]
- Zhen, L.; Cui, M.; Bai, X.; Jiang, J.; Ma, X.; Wang, M.; Liu, J.; Yang, B. Thin, Flexible Hybrid-Structured Piezoelectric Sensor Array with Enhanced Resolution and Sensitivity. Nano Energy 2024, 131, 110188. [Google Scholar] [CrossRef]
- Yin, M.; Guo, Y.; An, J.; Liu, T.; Gou, G.; Li, T.; Chen, G.; Ma, T.; Sun, J.; Han, M.; et al. Flexible Wide-Range, Sensitive Three-Axis Pressure Sensor Array for Robotic Grasping Feedback. Sens. Actuators Rep. 2024, 8, 100250. [Google Scholar] [CrossRef]
- Hernández-Sebastián, N.; Diaz-Alonso, D.; Barrientos-García, B.; Renero-Carrillo, F.J.; Calleja-Arriaga, W. Fabrication of an Integrated, Flexible, Wireless Pressure Sensor Array for the Monitoring of Ventricular Pressure. Micromachines 2024, 15, 1435. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, C.; Zheng, Z. Advancements in Transfer Printing Techniques for Flexible Electronics: Adjusting Interfaces and Promoting Versatility. Int. J. Extrem. Manuf. 2024, 6, 052005. [Google Scholar] [CrossRef]
- Wang, X.; Wu, G.; Zhang, X.; Lv, F.; Yang, Z.; Nan, X.; Zhang, Z.; Xue, C.; Cheng, H.; Gao, L. Traditional Chinese Medicine (TCM)-Inspired Fully Printed Soft Pressure Sensor Array with Self-Adaptive Pressurization for Highly Reliable Individualized Long-Term Pulse Diagnostics. Adv. Mater. 2025, 37, 2410312. [Google Scholar] [CrossRef]
- Nan, X.; Xu, Z.; Cao, X.; Hao, J.; Wang, X.; Duan, Q.; Wu, G.; Hu, L.; Zhao, Y.; Yang, Z.; et al. A Review of Epidermal Flexible Pressure Sensing Arrays. Biosensors 2023, 13, 656. [Google Scholar] [CrossRef]
- Benarrait, R.; Ullah-Khan, M.; Terrien, J.; Al Hajjar, H.; Lamarque, F.; Dietzel, A. A Flexible Double-Sided Curvature Sensor Array for Use in Soft Robotics. Sensors 2024, 24, 3475. [Google Scholar] [CrossRef]
- Wu, L.; Xue, J.; Meng, J.; Shi, B.; Sun, W.; Wang, E.; Dong, M.; Zheng, X.; Wu, Y.; Li, Y.; et al. Self-Powered Flexible Sensor Array for Dynamic Pressure Monitoring. Adv. Funct. Mater. 2024, 34, 2316712. [Google Scholar] [CrossRef]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement. Sensors 2016, 16, 819. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Shao, J.; Tian, H.; Li, X.; Wang, C.; Luo, Y. Scalable Imprinting of Flexible Multiplexed Sensor Arrays with Distributed Piezoelectricity-Enhanced Micropillars for Dynamic Tactile Sensing. Adv. Mater. Technol. 2020, 5, 2000046. [Google Scholar] [CrossRef]
- Zhao, C.; Li, F.-M.; Pan, X.-Y.; Li, S.; Zhai, Y.-F.; Fahad, S.; Yu, H.-Y.; Wang, M. Half-Encapsulated Rigid Microsphere Arrays for Enhancing the Sensitivity of In-Plane Integrated Pressure Sensor. IEEE Sens. J. 2023, 23, 12607–12617. [Google Scholar] [CrossRef]
- Kim, K.; Choi, J.; Jeong, Y.; Cho, I.; Kim, M.; Kim, S.; Oh, Y.; Park, I. Highly Sensitive and Wearable Liquid Metal-Based Pressure Sensor for Health Monitoring Applications: Integration of a 3D-Printed Microbump Array with the Microchannel. Adv. Healthc. Mater. 2019, 8, 1900978. [Google Scholar] [CrossRef]
- Fleer, S.; Moringen, A.; Klatzky, R.L.; Ritter, H. Learning Efficient Haptic Shape Exploration with a Rigid Tactile Sensor Array. PLoS ONE 2020, 15, e0226880. [Google Scholar] [CrossRef]
- Zhao, Y.; Yuan, Y.; Zhang, H.; Chen, Z.; Zhao, H.; Wu, G.; Zheng, W.; Xue, C.; Yin, Z.; Gao, L. A Fully Integrated Electronic Fabric-Enabled Multimodal Flexible Sensors for Real-Time Wireless Pressure-Humidity-Temperature Monitoring. Int. J. Extrem. Manuf. 2024, 6, 065502. [Google Scholar] [CrossRef]
- Duan, Y.; He, S.; Wu, J.; Su, B.; Wang, Y. Recent Progress in Flexible Pressure Sensor Arrays. Nanomaterials 2022, 12, 2495. [Google Scholar] [CrossRef]
- Han, Z.; Liu, L.; Zhang, J.; Han, Q.; Wang, K.; Song, H.; Wang, Z.; Jiao, Z.; Niu, S.; Ren, L. High-Performance Flexible Strain Sensor with Bio-Inspired Crack Arrays. Nanoscale 2018, 10, 15178–15186. [Google Scholar] [CrossRef]
- Li, M.; Chen, S.; Fan, B.; Wu, B.; Guo, X. Printed Flexible Strain Sensor Array for Bendable Interactive Surface. Adv. Funct. Mater. 2020, 30, 2003214. [Google Scholar] [CrossRef]
- Liu, Z.; Tian, B.; Jiang, Z.; Li, S.; Lei, J.; Zhang, Z.; Liu, J.; Shi, P.; Lin, Q. Flexible Temperature Sensor with High Sensitivity Ranging from Liquid Nitrogen Temperature to 1200 °C. Int. J. Extrem. Manuf. 2023, 5, 015601. [Google Scholar] [CrossRef]
- Che, Q.; Zhao, Q.; Hu, M.; Qin, R.; Shan, G.; Yang, J. Ag Nanowire-Based Stretchable Electrodes and Wearable Sensor Arrays. ACS Appl. Nano Mater. 2021, 4, 12726–12736. [Google Scholar] [CrossRef]
- Ren, Y.; Liu, G.; Yang, H.; Tong, T.; Xu, S.; Zhang, L.; Luo, J.; Zhang, C.; Xie, G. Dynamic Wear Sensor Array Based on Single-Electrode Triboelectric Nanogenerators. Nano Energy 2020, 68, 104303. [Google Scholar] [CrossRef]
- Su, Q.; Liu, C.; Xue, T.; Zou, Q. Sensitivity-Photo-Patternable Ionic Pressure Sensor Array with a Wearable Measurement Unit. ACS Appl. Mater. Interfaces 2022, 14, 33641–33649. [Google Scholar] [CrossRef]
- Zhi, X.; Ma, S.; Xia, Y.; Yang, B.; Zhang, S.; Liu, K.; Li, M.; Li, S.; Peiyuan, W.; Wang, X. Hybrid Tactile Sensor Array for Pressure Sensing and Tactile Pattern Recognition. Nano Energy 2024, 125, 109532. [Google Scholar] [CrossRef]
- Weichart, J.; Roman, C.; Hierold, C. Tactile Sensing with Scalable Capacitive Sensor Arrays on Flexible Substrates. J. Microelectromech. Syst. 2021, 30, 915–929. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Liu, Q.; Zhu, Y.; Wang, H.; Xie, Z.; Yu, X.; Zi, Y. A Metal-Electrode-Free, Fully Integrated, Soft Triboelectric Sensor Array for Self-Powered Tactile Sensing. Microsyst. Nanoeng. 2020, 6, 59. [Google Scholar] [CrossRef]
- Liao, L.; Zhou, S.; Yang, J.; Wang, Z.; Li, J.; Qiu, Z.; Yu, Z.; Yang, C.; Wang, H.; Wen, L. A Flexible Pressure Sensor Based on an Interlocked Micropillars Array with Secondary Nanoprotrusions for Health Monitoring. IEEE Trans. Instrum. Meas. 2024, 73, 4005709. [Google Scholar] [CrossRef]
- Luo, W.; Sharma, V.; Young, D.J. A Paper-Based Flexible Tactile Sensor Array for Low-Cost Wearable Human Health Monitoring. J. Microelectromech. Syst. 2020, 29, 825–831. [Google Scholar] [CrossRef]
- Shang, J.; Ma, X.; Zou, P.; Huang, C.; Lao, Z.; Wang, J.; Jiang, T.; Fu, Y.; Li, J.; Zhang, S.; et al. A Flexible Catheter-Based Sensor Array for Upper Airway Soft Tissues Pressure Monitoring. Nat. Commun. 2025, 16, 287. [Google Scholar] [CrossRef]
- Hussain, A.M.; Hussain, M.M. Deterministic Integration of Out-of-Plane Sensor Arrays for Flexible Electronic Applications. Small 2016, 12, 5141–5145. [Google Scholar] [CrossRef]
- Rachim, V.P.; Kang, S.; Baek, J.-H.; Park, S.-M. Unobtrusive, Cuffless Blood Pressure Monitoring Using a Soft Polymer Sensor Array with Flexible Hybrid Electronics. IEEE Sens. J. 2021, 21, 10132–10142. [Google Scholar] [CrossRef]
- Lahcen, A.A.; Labib, M.; Caprio, A.; Annabestani, M.; Sanchez-Botero, L.; Hsue, W.; Liu, C.F.; Dunham, S.; Mosadegh, B. Design, Testing, and Validation of a Soft Robotic Sensor Array Integrated with Flexible Electronics for Mapping Cardiac Arrhythmias. Micromachines 2024, 15, 1393. [Google Scholar] [CrossRef]
- Van Nguyen, D.; Song, P.; Manshaii, F.; Bell, J.; Chen, J.; Dinh, T. Advances in Soft Strain and Pressure Sensors. ACS Nano 2025, 19, acsnano.4c15134. [Google Scholar] [CrossRef]
- Basov, M. Schottky Diode Temperature Sensor for Pressure Sensor. Sens. Actuators A Phys. 2021, 331, 112930. [Google Scholar] [CrossRef]
- Han, S.; Peng, H.; Sun, Q.; Venkatesh, S.; Chung, K.; Lau, S.C.; Zhou, Y.; Roy, V.A.L. An Overview of the Development of Flexible Sensors. Adv. Mater. 2017, 29, 1700375. [Google Scholar] [CrossRef]
- Yang, N.; Wu, H.; Wang, S.; Yuan, G.; Zhang, J.; Sokolov, O.; Bichurin, M.I.; Wang, K.; Wang, Y. Ultrasensitive Flexible Magnetoelectric Sensor. APL Mater. 2021, 9, 021123. [Google Scholar] [CrossRef]
- Smocot, S.; Zhang, Z.; Zhang, L.; Guo, S.; Cao, C. Printed Flexible Mechanical Sensors. Nanoscale 2022, 14, 17134–17156. [Google Scholar] [CrossRef]
- Wang, T.; Guo, Y.; Wan, P.; Zhang, H.; Chen, X.; Sun, X. Flexible Transparent Electronic Gas Sensors. Small 2016, 12, 3748–3756. [Google Scholar] [CrossRef]
- Xuan, Y.; Lu, Y.; Honda, S.; Arie, T.; Akita, S.; Takei, K. Active-Matrix-Based Flexible Optical Image Sensor. Adv. Mater. Technol. 2021, 6, 2100259. [Google Scholar] [CrossRef]
- Wang, F.; Zhu, B.; Shu, L.; Tao, X. Flexible Pressure Sensors for Smart Protective Clothing against Impact Loading. Smart Mater. Struct. 2014, 23, 015001. [Google Scholar] [CrossRef]
- Wang, J.; Zhong, B.; Wang, H. Measuring Garment Pressure at any Point Using a Wearable Sensor. J. Eng. Fibers Fabr. 2019, 14, 1558925019879290. [Google Scholar] [CrossRef]
- Ma, Y.; Shi, W.; Tang, K.; Li, S.; Sun, J.; Xu, D.; Li, W.; Hu, X.; Tian, M. Flexible Polyimide-Based Flame-Retardant E-Textile for Fire Damage Warning in Firefighting Clothing. Prog. Org. Coat. 2024, 192, 108517. [Google Scholar] [CrossRef]
- Yuan, Y.; Liu, B.; Li, H.; Li, M.; Song, Y.; Wang, R.; Wang, T.; Zhang, H. Flexible Wearable Sensors in Medical Monitoring. Biosensors 2022, 12, 1069. [Google Scholar] [CrossRef]
- Wang, K.; Wu, Z.; Wu, R.; Zang, J.; Lu, B.; Du, C.; Yu, Y. Direct Fabrication of Flexible Strain Sensor with Adjustable Gauge Factor on Medical Catheters. J. Sci. Adv. Mater. Devices 2023, 8, 100558. [Google Scholar] [CrossRef]
- Wang, H.L.; Kuang, S.Y.; Li, H.Y.; Wang, Z.L.; Zhu, G. Large-Area Integrated Triboelectric Sensor Array for Wireless Static and Dynamic Pressure Detection and Mapping. Small 2020, 16, 1906352. [Google Scholar] [CrossRef]
- Zheng, L.; Hou, X.; Xu, M.; Yang, Y.; Gao, J.; Luo, L.; Zhu, Q.; Li, W.; Wang, X. Scalable Manufacturing of Large-Area Pressure Sensor Array for Sitting Posture Recognition in Real Time. ACS Mater. Au 2023, 3, 669–677. [Google Scholar] [CrossRef]
- Xu, X.; Liu, W.; Ji, Z.; Hao, D.; Yan, W.; Ye, Z.; Hu, Y.; Fang, M.; Wang, C.; Ma, L.; et al. Large-Area Periodic Organic–Inorganic Hybrid Perovskite Nanopyramid Arrays for High-Performance Photodetector and Image Sensor Applications. ACS Mater. Lett. 2021, 3, 1189–1196. [Google Scholar] [CrossRef]
- Jiang, T.; Nan, W.; Han, L.; Wei, H.; Wang, M.; Peng, J.; Chen, Y.; Hou, X.; Zhan, D. A Rigidity/Flexibility Compatible Strategy to Improve the Stability and Durability of Flexible Electrochemical Sensor Based on a Polydimethylsiloxane Membrane Supported Prussian Blue@Carbon Nanotube Array. Electroanalysis 2022, 34, 655–658. [Google Scholar] [CrossRef]
- Chen, Z.; Ming, T.; Goulamaly, M.M.; Yao, H.; Nezich, D.; Hempel, M.; Hofmann, M.; Kong, J. Enhancing the Sensitivity of Percolative Graphene Films for Flexible and Transparent Pressure Sensor Arrays. Adv. Funct. Mater. 2016, 26, 5061–5067. [Google Scholar] [CrossRef]
- Gong, X.; Huang, K.; Wu, Y.-H.; Zhang, X.-S. Recent Progress on Screen-Printed Flexible Sensors for Human Health Monitoring. Sens. Actuators A Phys. 2022, 345, 113821. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, J.; Xiao, J.; Kang, Y.; Yu, L.; Jiang, C.; Pan, Y.; Dong, H.; Gao, S.; Wang, Y. A High-Resolution, Ultrabroad-Range and Sensitive Capacitive Tactile Sensor Based on a CNT/PDMS Composite for Robotic Hands. Nanoscale 2021, 13, 18780–18788. [Google Scholar] [CrossRef] [PubMed]
- Cao, S.; Pyatt, S.; Anthony, C.; Kubba, A.; Kubba, A.; Olatunbosun, O. Flexible Bond Wire Capacitive Strain Sensor for Vehicle Tyres. Sensors 2016, 16, 929. [Google Scholar] [CrossRef] [PubMed]
- Ning, C.; Dong, K.; Cheng, R.; Yi, J.; Ye, C.; Peng, X.; Sheng, F.; Jiang, Y.; Wang, Z.L. Flexible and Stretchable Fiber-Shaped Triboelectric Nanogenerators for Biomechanical Monitoring and Human-Interactive Sensing. Adv. Funct. Mater. 2021, 31, 2006679. [Google Scholar] [CrossRef]
- Zhao, X.; Hua, Q.; Yu, R.; Zhang, Y.; Pan, C. Flexible, Stretchable and Wearable Multifunctional Sensor Array as Artificial Electronic Skin for Static and Dynamic Strain Mapping. Adv. Elect. Mater. 2015, 1, 1500142. [Google Scholar] [CrossRef]
- Liu, B.; Qi, F.; Zhou, D.; Nie, L.; Xian, Y.; Lu, X. A Novel Flexible Plasma Array for Large-Area Uniform Treatment of an Irregular Surface. Plasma Sci. Technol. 2022, 24, 035403. [Google Scholar] [CrossRef]
- Chou, J.-C.; Chen, J.-T.; Liao, Y.-H.; Lai, C.-H.; Chen, R.-T.; Tsai, Y.-L.; Lin, C.-Y.; Chen, J.-S.; Huang, M.-S.; Chou, H.-T. Wireless Sensing System for Flexible Arrayed Potentiometric Sensor Based on XBee Module. IEEE Sens. J. 2016, 16, 5588–5595. [Google Scholar] [CrossRef]
- Gao, L.; Han, Y.; Surjadi, J.U.; Cao, K.; Zhou, W.; Xu, H.; Hu, X.; Wang, M.; Fan, K.; Wang, Y.; et al. Magnetically Induced Micropillar Arrays for an Ultrasensitive Flexible Sensor with a Wireless Recharging System. Sci. China Mater. 2021, 64, 1977–1988. [Google Scholar] [CrossRef]
- Lee, Y.; Jung, G.; Jin, S.W.; Ha, J.S. Flexible Thin-Film Speaker Integrated with an Array of Quantum-Dot Light-Emitting Diodes for the Interactive Audiovisual Display of Multi-Functional Sensor Signals. ACS Appl. Mater. Interfaces 2022, 14, 48844–48856. [Google Scholar] [CrossRef]
- Ouyang, C.; Liu, D.; He, K.; Kang, J. Recent Advances in Touch Sensors for Flexible Displays. IEEE Open J. Nanotechnol. 2023, 4, 36–46. [Google Scholar] [CrossRef]
- Yang, J.; Chen, Y.; Liu, S.; Liu, C.; Ma, T.; Luo, Z.; Ge, G. Single-Line Multi-Channel Flexible Stress Sensor Arrays. Micromachines 2023, 14, 1554. [Google Scholar] [CrossRef]
- Shu, Q.; Pang, Y.; Li, Q.; Gu, Y.; Liu, Z.; Liu, B.; Li, J.; Li, Y. Flexible Resistive Tactile Pressure Sensors. J. Mater. Chem. A 2024, 12, 9296–9321. [Google Scholar] [CrossRef]
- Liu, Z.; Cai, M.; Hong, S.; Shi, J.; Xie, S.; Liu, C.; Du, H.; Morin, J.D.; Li, G.; Wang, L.; et al. Data-Driven Inverse Design of Flexible Pressure Sensors. Proc. Natl. Acad. Sci. USA 2024, 121, e2320222121. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y.; Wu, Y.; Asghar, W.; Xia, X.; Liu, C.; Bai, X.; Shang, J.; Liu, Y.; Li, R.-W. Piezo-Capacitive Flexible Pressure Sensor with Magnetically Self-Assembled Microneedle Array. ACS Sens. 2025, 10, acssensors.4c02895. [Google Scholar] [CrossRef] [PubMed]
- Wei, C.; Xu, Y.; Hu, Y.; Zhang, Q.; Wei, N.; Zeng, W.; Wu, R. Ti3C2Tx MXene Paper-Based Flexible Wearable Pressure Sensor with Wide Pressure Detection Range for Human Motion Detection. J. Alloys Compd. 2025, 1017, 179126. [Google Scholar] [CrossRef]
- Jia, P.; Zhang, Q.; Ren, Z.; Yin, J.; Lei, D.; Lu, W.; Yao, Q.; Deng, M.; Gao, Y.; Liu, N. Self-Powered Flexible Battery Pressure Sensor Based on Gelatin. Chem. Eng. J. 2024, 479, 147586. [Google Scholar] [CrossRef]
- Zhang, Q.; Lei, D.; Liu, N.; Liu, Z.; Ren, Z.; Yin, J.; Jia, P.; Lu, W.; Gao, Y. A Zinc-Ion Battery-Type Self-Powered Pressure Sensor with Long Service Life. Adv. Mater. 2022, 34, 2205369. [Google Scholar] [CrossRef]
- Wang, J.; Cui, X.; Song, Y.; Chen, J.; Zhu, Y. Flexible Iontronic Sensors with High-Precision and High-Sensitivity Detection for Pressure and Temperature. Compos. Commun. 2023, 39, 101544. [Google Scholar] [CrossRef]
- Long, W.; Yao, Y.; Ye, Y.; Zhang, C.; Xu, J.; Zhong, D.; Fu, Z.; Zhang, J.; Liu, X.; Xia, L. Flexible Strain Sensor Based on Carbonized Corn Stalk with Three-Dimensional Network. Ind. Crops Prod. 2025, 225, 120496. [Google Scholar] [CrossRef]
- Chen, X.; Yang, X.; Zhang, Q.; Shu, S.; Han, Z. Bioinspired, Ultrasensitive, Highly Stable Flexible Strain Sensor with Circularly Arranged Cross-Cracks. Chem. Eng. J. 2025, 505, 159370. [Google Scholar] [CrossRef]
- Xiao, T.; Chen, Y.; Li, Q.; Gao, Y.; Pan, L.; Xuan, F. All Digital Light Processing-3D Printing of Flexible Sensor. Adv. Mater. Technol. 2023, 8, 2201376. [Google Scholar] [CrossRef]
- Liu, P.; Tong, W.; Hu, R.; Yang, A.; Tian, H.; Guo, X.; Liu, C.; Ma, Y.; Tian, H.; Song, A.; et al. Ultra-Sensitive Flexible Resistive Sensor Based on Modified PEDOT: PSS Inspired by Earthworm. Chem. Eng. J. 2024, 494, 152984. [Google Scholar] [CrossRef]
- Li, S.; Yang, M.; Wu, Y.; Asghar, W.; Lu, X.; Zhang, H.; Cui, E.; Fang, Z.; Shang, J.; Liu, Y.; et al. A Flexible Dual-Mode Sensor with Decoupled Strain and Temperature Sensing for Smart Robots. Mater. Horiz. 2024, 11, 6361–6370. [Google Scholar] [CrossRef] [PubMed]
- Bijender; Kumar, A. Recent Progress in the Fabrication and Applications of Flexible Capacitive and Resistive Pressure Sensors. Sens. Actuators A Phys. 2022, 344, 113770. [Google Scholar] [CrossRef]
- Ma, J.; Huang, H.; Li, B. Wavy-Shaped Flexible Capacitive Strain Sensor for Multiple Deformations Recognition. Sens. Actuators A Phys. 2024, 366, 115025. [Google Scholar] [CrossRef]
- Yue, X.; Wang, X.; Shao, J.; Wang, H.; Chen, Y.; Zhang, K.; Han, X.; Hong, J. One-Dimensional Flexible Capacitive Sensor with Large Strain and High Stability for Human Motion Monitoring. ACS Appl. Mater. Interfaces 2024, 16, 59412–59423. [Google Scholar] [CrossRef]
- Xu, D.; Bai, N.; Wang, W.; Wu, X.; Liu, K.; Liu, M.; Ping, M.; Zhou, L.; Jiang, P.; Zhao, Y.; et al. 3D Network Spacer-Embedded Flexible Iontronic Pressure Sensor Array with High Sensitivity over a Broad Sensing Range. ACS Appl. Mater. Interfaces 2024, 16, 58780–58790. [Google Scholar] [CrossRef]
- Wang, Y.; Xiang, M.; Li, J.; Yang, S.; Li, J.; Wen, Q.; Gao, L.; Li, J. Highly Sensitive Flexible Iontronic Pressure Sensor for Marine Pressure Monitoring. IEEE Electron Device Lett. 2024, 45, 2530–2533. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, L.; Luo, Y.; Wang, K.; Feng, X.; Pei, Y.; Wu, H.; Li, Y.; Wang, Z.; Lu, B. A Convenient, Low-Cost Graphene UV-Cured Additive Manufacturing Electronic Process to Achieve Flexible Sensors. Chem. Eng. J. 2023, 451, 138521. [Google Scholar] [CrossRef]
- Han, Y.; Liu, Y.; Liu, Y.; Jiang, D.; Wu, Z.; Jiang, B.; Yan, H.; Toktarbay, Z. High-Performance PVA-Based Hydrogels for Ultra-Sensitive and Durable Flexible Sensors. Adv. Compos. Hybrid Mater. 2025, 8, 154. [Google Scholar] [CrossRef]
- Mu, J.; Li, C.; Li, D.; Song, X.; Chen, S.; Xu, F. Self-Gelated Flexible Lignin-Based Ionohydrogels for Efficient Self-Powered Strain Sensors. Chem. Eng. J. 2025, 507, 160750. [Google Scholar] [CrossRef]
- Guo, Z.; Sun, W.; Yang, Z.; Wu, X.; Wu, Y.; Zhang, Y.; Lan, W.; Liao, Y.; Wu, X.; Liu, Y. “One-Step” Preparation Process for the Flexible and Breathable Piezoelectric Sensor. ACS Appl. Electron. Mater. 2023, 5, 4209–4219. [Google Scholar] [CrossRef]
- Xu, K.; Tang, Y. Review: Progress on 3D Printing Technology in the Preparation of Flexible Tactile Sensors. J. Mater. Sci. 2023, 58, 16869–16890. [Google Scholar] [CrossRef]
- Guo, F.; Li, Y.; Ma, G.; Zhang, M.; Fu, J.; Luo, C.; Yuan, L.; Long, Y. Overview of 3D Printing Multimodal Flexible Sensors. ACS Appl. Mater. Interfaces 2024, 16, 65779–65795. [Google Scholar] [CrossRef]
- Ma, Z.; Wu, Y.; Lu, S.; Li, J.; Liu, J.; Huang, X.; Zhang, X.; Zhang, Y.; Dong, G.; Qin, L.; et al. Magnetically Assisted 3D Printing of Ultra-Antiwear Flexible Sensor. Adv. Funct. Mater. 2024, 34, 2406108. [Google Scholar] [CrossRef]
- Zhang, S.; Feng, W.; Jiang, Y.; Li, Y.; Liu, Y.; Yu, D.; Wang, W. Flexible Pressure Sensor Based on 3D Printing MXene@dual-Scale Porous Polymer. Chem. Eng. J. 2024, 498, 155356. [Google Scholar] [CrossRef]
- Wu, G.; Wu, L.; Zhang, H.; Wang, X.; Xiang, M.; Teng, Y.; Xu, Z.; Lv, F.; Huang, Z.; Lin, Y.; et al. Research Progress of Screen-Printed Flexible Pressure Sensor. Sens. Actuators A Phys. 2024, 374, 115512. [Google Scholar] [CrossRef]
- Teng, Y.; Wang, X.; Zhang, Z.; Mei, S.; Nan, X.; Zhao, Y.; Zhang, X.; Xue, C.; Gao, L.; Li, J. Fully Printed Minimum Port Flexible Interdigital Electrode Sensor Arrays. Nanoscale 2024, 16, 7427–7436. [Google Scholar] [CrossRef]
- Zhao, Y.; Sun, Q.; Mei, S.; Gao, L.; Zhang, X.; Yang, Z.; Nan, X.; Zhang, H.; Xue, C.; Li, J. Wearable Multichannel-Active Pressurized Pulse Sensing Platform. Microsyst. Nanoeng. 2024, 10, 77. [Google Scholar] [CrossRef]
- Wang, C.; Yu, F.; Chen, C.; Xia, J.; Gan, Y.; Li, J.; Yao, J.; Zheng, J.; Chen, X.; Wu, Z.; et al. Laser Etching of On-Chip Ultra-High Stability Flexible Micro MnO2//Zn Batteries. Mater. Today Energy 2024, 41, 101530. [Google Scholar] [CrossRef]
- Xie, H.; Huang, Z.; Wan, J.; Zhou, R.; Chen, T.; Wang, Y.; Cheng, D.; Yang, L.; Ji, J.; Jiang, Y.; et al. Dual-Band Laser Selective Etching for Stretchable and Strain Interference-Free Pressure Sensor Arrays. Adv. Funct. Mater. 2024, 34, 2401532. [Google Scholar] [CrossRef]
- Xue, Y.; Weng, Z.; Xiang, Q.; Liao, N.; Xue, W. Magnetron Sputtering Preparation of Flexible ZnO/AlN Thin-Films Sensors with Hybrid Piezoelectric Effect for Broad-Range Human Motions Detection. Ceram. Int. 2024, 50, 51429–51436. [Google Scholar] [CrossRef]
- Xiang, Q.; Luo, S.; Xue, Y.; Liao, N. Flexible and Sensitive Three-Dimension Structured Indium Tin Oxide/Zinc Aluminum Oxide/Cu Composites Thin-Films Pressure Sensors for Healthcare Monitoring. Surf. Interfaces 2024, 52, 104854. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Z.; Zhang, K.; Wang, S.; Bu, X.; Tan, J.; Song, W.; Mu, Z.; Zhang, P.; Huang, L. A Flexible Capacitive Pressure Sensor with Adjustable Detection Range Based on the Inflatable Dielectric Layer for Human–Computer Interaction. ACS Appl. Mater. Interfaces 2024, 16, 40250–40262. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Wang, J.; He, L.; Song, J.; Yang, Z.; Hammad, F.A. High-Performance Multidirectional Flexible Strain Sensor for Human Motion and Health Monitoring. ACS Appl. Mater. Interfaces 2024, 16, 41409–41420. [Google Scholar] [CrossRef]
- Jiang, J.; Chen, X.; Niu, Y.; He, X.; Hu, Y.; Wang, C. Advances in Flexible Sensors with MXene Materials. New Carbon Mater. 2022, 37, 303–320. [Google Scholar] [CrossRef]
- Zhu, Y.; Song, S.; Yang, Y.; Zhang, R.; Xie, D.; Zhang, C.; Song, Y. Regenerated Cellulose Hydrogel with Excellent Mechanical Properties for Flexible Sensors. Ind. Crops Prod. 2024, 210, 118026. [Google Scholar] [CrossRef]
- Dai, W.; Tang, N.; Zhu, Y.; Wang, J.; Hu, W.; Fei, F.; Chai, X.; Tian, H.; Lu, W. Sandwich-Type Self-Healing Sensor with Multilevel for Motion Detection. ACS Appl. Mater. Interfaces 2024, 16, 7927–7938. [Google Scholar] [CrossRef]
- Zhong, Y.; Liu, K.; Wu, L.; Ji, W.; Cheng, G.; Ding, J. Flexible Tactile Sensors with Gradient Conformal Dome Structures. ACS Appl. Mater. Interfaces 2024, 16, 52966–52976. [Google Scholar] [CrossRef]
- Yi, L.; Wang, D.; Zhao, Y.; Li, Y.; Lin, K.; Wang, L.; Liu, F. A Multielectrode Layout for High Reliability of Flexible Piezoresistive Sensor: One Stimulus Signal to Three Sensing Signals. ACS Sens. 2024, 9, 3671–3679. [Google Scholar] [CrossRef]
- Feng, Z.; Wen, J.; Meng, F.; Tian, R.; Wang, S.; Wang, K.; Tian, Y. In Situ-Polymerized PANI/WS2 Nanocomposites for Highly Sensitive Flexible Ammonia Gas Sensors and Respiration Monitoring Devices. ACS Appl. Nano Mater. 2024, 7, 3385–3393. [Google Scholar] [CrossRef]
- Xie, Y.; Wu, X.; Huang, X.; Liang, Q.; Deng, S.; Wu, Z.; Yao, Y.; Lu, L. A Deep Learning-Enabled Skin-Inspired Pressure Sensor for Complicated Recognition Tasks with Ultralong Life. Research 2023, 6, 0157. [Google Scholar] [CrossRef]
- Usman, M.; Jamhour, N.; Hettinger, J.; Xue, W. Smart Wearable Flexible Temperature Sensor with Compensation against Bending and Stretching Effects. Sens. Actuators A Phys. 2023, 353, 114224. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, L.; Zhang, C.; Bao, B.; Li, Q.; Wang, L.; Song, Z.; Li, D. Deep-learning Enabled Smart Insole System Aiming for Multifunctional Foot-healthcare Applications. Exploration 2024, 4, 20230109. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, Y.; Shi, J.; Liu, Z.; Wang, Q.; Guo, C.F. High-Porosity Foam-Based Iontronic Pressure Sensor with Superhigh Sensitivity of 9280 kPa−1. Nano-Micro Lett. 2022, 14, 21. [Google Scholar] [CrossRef]
- Gao, L.; Wang, M.; Wang, W.; Xu, H.; Wang, Y.; Zhao, H.; Cao, K.; Xu, D.; Li, L. Highly Sensitive Pseudocapacitive Iontronic Pressure Sensor with Broad Sensing Range. Nano-Micro Lett. 2021, 13, 140. [Google Scholar] [CrossRef]
- Song, C.; Liu, J.; Cao, Y.; Li, W.; He, C. Efficient Solution Blow Spinning of PAN-CNTs Nanofiber-Based Pressure Sensors with Sandwich Structures. Langmuir 2024, 40, 20515–20525. [Google Scholar] [CrossRef]
- Zhang, X.; Chang, S.; Tong, Z. Facile Fabrication of a Highly Sensitive and Robust Flexible Pressure Sensor with Batten Microstructures. Micromachines 2022, 13, 1164. [Google Scholar] [CrossRef]
- Tan, J.; Zhang, P.; Zhang, K.; Bu, X.; Dou, G.; Huang, L. Fabrication of Flexible Capacitive Pressure Sensors by Adjusting the Height of the Interdigital Electrode. ACS Appl. Electron. Mater. 2024, 6, 4539–4547. [Google Scholar] [CrossRef]
- Yang, S.; Li, C.; Wen, N.; Xu, S.; Huang, H.; Cong, T.; Zhao, Y.; Fan, Z.; Liu, K.; Pan, L. All-Fabric-Based Multifunctional Textile Sensor for Detection and Discrimination of Humidity, Temperature, and Strain Stimuli. J. Mater. Chem. C 2021, 9, 13789–13798. [Google Scholar] [CrossRef]
- Ling, L.; Liu, F.; Li, J.; Zhang, G.; Sun, R.; Wong, C. Self-Healable and Mechanically Reinforced Multidimensional-Carbon/Polyurethane Dielectric Nanocomposite Incorporates Various Functionalities for Capacitive Strain Sensor Applications. Macro Chem. Phys. 2018, 219, 1800369. [Google Scholar] [CrossRef]
- Li, X.; Cao, J.; Li, H.; Yu, P.; Fan, Y.; Xiao, Y.; Yin, Y.; Zhao, X.; Wang, Z.L.; Zhu, G. Differentiation of Multiple Mechanical Stimuli by a Flexible Sensor Using a Dual-Interdigital-Electrode Layout for Bodily Kinesthetic Identification. ACS Appl. Mater. Interfaces 2021, 13, 26394–26403. [Google Scholar] [CrossRef]
- Wang, X.; Deng, Y.; Jiang, P.; Chen, X.; Yu, H. Low-Hysteresis, Pressure-Insensitive, and Transparent Capacitive Strain Sensor for Human Activity Monitoring. Microsyst. Nanoeng. 2022, 8, 113. [Google Scholar] [CrossRef]
- Tu, Z.; Xia, Z.; Luo, W.; Huang, P.; Lin, J. Structural Design of Flexible Interdigital Capacitor Based upon 3D Printing and Spraying Process. Smart Mater. Struct. 2022, 31, 045005. [Google Scholar] [CrossRef]
- Li, X.-D.; Huang, H.-X. Flexible and Multifunctional Pressure/Gas Sensors with Polypyrrole-Coated TPU Hierarchical Array. ACS Appl. Mater. Interfaces 2024, 16, 53072–53082. [Google Scholar] [CrossRef]
- Guo, W.-Y.; Mai, T.; Huang, L.-Z.; Zhang, W.; Qi, M.-Y.; Yao, C.; Ma, M.-G. Multifunctional MXene Conductive Zwitterionic Hydrogel for Flexible Wearable Sensors and Arrays. ACS Appl. Mater. Interfaces 2023, 15, 24933–24947. [Google Scholar] [CrossRef]
- Nitta, R.; Lin, H.-E.; Kubota, Y.; Kishi, T.; Yano, T.; Matsushita, N. CuO Nanostructure-Based Flexible Humidity Sensors Fabricated on PET Substrates by Spin-Spray Method. Appl. Surf. Sci. 2022, 572, 151352. [Google Scholar] [CrossRef]
- Menichelli, M.; Antognini, L.; Aziz, S.; Bashiri, A.; Bizzarri, M.; Calcagnile, L.; Caprai, M.; Caputo, D.; Caricato, A.P.; Catalano, R.; et al. Characterization of Hydrogenated Amorphous Silicon Sensors on Polyimide Flexible Substrate. IEEE Sens. J. 2024, 24, 12466–12471. [Google Scholar] [CrossRef]
- Li, M.; Lu, J.; Wan, P.; Jiang, M.; Mo, Y.; Pan, C. An Ultrasensitive Perovskite Single-Model Plasmonic Strain Sensor Based on Piezoelectric Effect. Adv. Funct. Mater. 2024, 34, 2403840. [Google Scholar] [CrossRef]
- Sun, H.; Xie, Y.; Liu, X.; Chen, G.; Li, F.; Xu, L.; Yu, B. High-Performance Flexible Strain Sensor Based on Thermoplastic Polyurethane Melt-Blown Nonwoven with Molybdenum Disulfide for Human Motion Monitoring. ACS Appl. Electron. Mater. 2024, 6, 7551–7562. [Google Scholar] [CrossRef]
- Wang, J.; Xia, G.; Xia, L.; Chen, Y.; Li, Q.; Zeng, H.; Yang, W.; Du, Y.; He, W.; Chen, Y. HCNT/AgNPs/PVA/PAM Hydrogel-Based Flexible Pressure Sensor for Physiological Monitoring. J. Mater. Sci. Mater. Electron. 2024, 35, 1931. [Google Scholar] [CrossRef]
- Xiao, W.; Cai, X.; Jadoon, A.; Zhou, Y.; Gou, Q.; Tang, J.; Ma, X.; Wang, W.; Cai, J. High-Performance Graphene Flexible Sensors for Pulse Monitoring and Human–Machine Interaction. ACS Appl. Mater. Interfaces 2024, 16, 32445–32455. [Google Scholar] [CrossRef]
- Huang, L.; Huang, X.; Bu, X.; Wang, S.; Zhang, P. Flexible Strain Sensor Based on PU Film with Three-Dimensional Porous Network. Sens. Actuators A Phys. 2023, 359, 114508. [Google Scholar] [CrossRef]
- Xiao, Y.; Jiang, S.; Li, Y.; Zhang, W. Screen-Printed Flexible Negative Temperature Coefficient Temperature Sensor Based on Polyvinyl Chloride/Carbon Black Composites. Smart Mater. Struct. 2021, 30, 025035. [Google Scholar] [CrossRef]
- Sui, X.; Mu, Q.; Li, J.; Zhao, B.; Gu, H.; Yu, H.; Du, J.; Ren, L.; Hu, D. High-Performance Flexible PLA/BTO-Based Pressure Sensor for Motion Monitoring and Human–Computer Interaction. Biosensors 2024, 14, 508. [Google Scholar] [CrossRef]
- Li, Y.; Yang, D.; Wu, Z.; Gao, F.-L.; Gao, X.-Z.; Zhao, H.-Y.; Li, X.; Yu, Z.-Z. Self-Adhesive, Self-Healing, Biocompatible and Conductive Polyacrylamide Nanocomposite Hydrogels for Reliable Strain and Pressure Sensors. Nano Energy 2023, 109, 108324. [Google Scholar] [CrossRef]
- Nikoofar, K.; Sadathosainy, M. Phthalic Anhydride (PA): A Valuable Substrate in Organic Transformations. RSC Adv. 2023, 13, 23870–23946. [Google Scholar] [CrossRef]
- Zeng, X.; Gui, Y.; Yang, J.; Jin, G.; Wang, X.; Huang, H. Iron Nanowire/Carbon Microsphere Composite Flexible Fabric Strain Sensor for Human Motion Monitoring. Micro Nanostruct. 2024, 193, 207920. [Google Scholar] [CrossRef]
- Park, C.Y.; Seo, D.; Lee, S.J.; Kim, H.-C.; Lee, I.H. Characteristics of Flexible Pressure Sensor According to Circuit Configuration of MWCNTs/Polydimethylsiloxane Composite and Conductive Layer. Int. J. Precis. Eng. Manuf. 2024, 25, 819–827. [Google Scholar] [CrossRef]
- Zhu, X.; Sun, H.; Yu, B.; Xu, L.; Xiao, H.; Fu, Z.; Gao, T.; Yang, X. A Flexible pH Sensor Based on Polyaniline@oily Polyurethane/Polypropylene Spunbonded Nonwoven Fabric. RSC Adv. 2024, 14, 5627–5637. [Google Scholar] [CrossRef]
- Zhang, R.; Ye, Z.; Gao, M.; Gao, C.; Zhang, X.; Li, L.; Gui, L. Liquid Metal Electrode-Enabled Flexible Microdroplet Sensor. Lab Chip 2020, 20, 496–504. [Google Scholar] [CrossRef]
- Luo, J.; Hu, Y.; Luo, S.; Wang, X.; Chen, S.; Zhang, M.; Jiang, J.; Liu, L.; Qin, H. Strong and Multifunctional Lignin/Liquid Metal Hydrogel Composite as Flexible Strain Sensors. ACS Sustain. Chem. Eng. 2024, 12, 7105–7114. [Google Scholar] [CrossRef]
- Zhu, W.; Zhang, C.; Lin, J.; Pan, S.; Wang, Q.; Liao, N.; Yu, P.; Zhang, M. Flexible Strain Sensor Based on Copper/Graphene Composite Films. ACS Appl. Nano Mater. 2024, 7, 358–369. [Google Scholar] [CrossRef]
- Zhou, X.; Cao, W. Flexible and Stretchable Carbon-Based Sensors and Actuators for Soft Robots. Nanomaterials 2023, 13, 316. [Google Scholar] [CrossRef]
- Chaloeipote, G.; Wongchoosuk, C. Flexible Humidity Sensor Based on PEDOT:PSS/Mxene Nanocomposite. Flex. Print. Electron. 2024, 9, 015015. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, F.; Cao, G.; Zhou, D.; Zhang, G.; Feng, J.; Wang, S.; Su, F.; Tian, Y.; Liu, Y.J.; et al. Bifunctional Flexible Electrochromic Energy Storage Devices Based on Silver Nanowire Flexible Transparent Electrodes. Int. J. Extrem. Manuf. 2023, 5, 015503. [Google Scholar] [CrossRef]
- Zhu, B.; Ling, Y.; Yap, L.W.; Yang, M.; Lin, F.; Gong, S.; Wang, Y.; An, T.; Zhao, Y.; Cheng, W. Hierarchically Structured Vertical Gold Nanowire Array-Based Wearable Pressure Sensors for Wireless Health Monitoring. ACS Appl. Mater. Interfaces 2019, 11, 29014–29021. [Google Scholar] [CrossRef]
- Yi, N.; Zhang, C.; Wang, Z.; Zheng, Z.; Zhou, J.; Shang, R.; Zhou, P.; Zheng, C.; You, M.; Chen, H.; et al. Multi-Functional Ti3C2Tx-Silver@Silk Nanofiber Composites with Multi-Dimensional Heterogeneous Structure for Versatile Wearable Electronics. Adv. Funct. Mater. 2025, 35, 2412307. [Google Scholar] [CrossRef]
- Pavel, I.-A.; Lakard, S.; Lakard, B. Flexible Sensors Based on Conductive Polymers. Chemosensors 2022, 10, 97. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Y.; Li, Z.; Wang, Y.; Dai, K.; Zheng, G.; Liu, C.; Shen, C. The Effect of Filler Dimensionality on the Electromechanical Performance of Polydimethylsiloxane Based Conductive Nanocomposites for Flexible Strain Sensors. Compos. Sci. Technol. 2017, 139, 64–73. [Google Scholar] [CrossRef]
- Spieser, H.; Tehrani, Z.; Ali, M.M.; Ahmadi, E.D.; Denneulin, A.; Bras, J.; Deganello, D.; Gethin, D. Metal Organic Framework Sensors on Flexible Substrate for Ammonia Sensing Application at Room Temperature. J. Mater. Chem. C 2021, 9, 6332–6343. [Google Scholar] [CrossRef]
- Wei, X.; Liu, Z.; Fang, H.; Cui, Z.; He, S.; Shao, W. Curcumin-Involved Self-Healing Hydrogels as Flexible Sensors. Polymer 2025, 319, 128047. [Google Scholar] [CrossRef]
- Meng, T.; Zhao, G.; Liu, H.; Li, W.; Feng, C.; Hu, W. 3D Flexible Displacement Sensor for Highly Sensitive Movement Measurement Assisted by the Terahertz Imaging System. Front. Mater. 2022, 9, 957909. [Google Scholar] [CrossRef]
- Wang, Z.; Cui, H.; Li, S.; Feng, X.; Aghassi-Hagmann, J.; Azizian, S.; Levkin, P.A. Facile Approach to Conductive Polymer Microelectrodes for Flexible Electronics. ACS Appl. Mater. Interfaces 2021, 13, 21661–21668. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Cai, M.; Jia, R.; Xu, X.; Xu, M.; Cheng, G.; Cheng, L.; Dai, F. Flat-Silk-Cocoon-Based Wearable Flexible Piezoresistive Sensor and Its Performance. Polymers 2024, 16, 295. [Google Scholar] [CrossRef]
- Li, P.; Feng, Y.; Ding, C.; Zhong, R.; Yan, W.; Song, J.; Hong, Z.; Hu, B.; Tan, J.; Sun, J.; et al. Magnetointeractive Cr2 Te3-Coated Liquid Metal Droplets for Flexible Memory Arrays and Wearable Sensors. Adv. Mater. 2024, 2414519. [Google Scholar] [CrossRef]
- Wang, J.; Suo, J.; Song, Z.; Li, W.J.; Wang, Z. Nanomaterial-Based Flexible Sensors for Metaverse and Virtual Reality Applications. Int. J. Extrem. Manuf. 2023, 5, 032013. [Google Scholar] [CrossRef]
- Zhao, G.; Wang, X.; Liu, G.; Thi Dieu Thuy, N. A Disposable and Flexible Electrochemical Sensor for the Sensitive Detection of Heavy Metals Based on a One-Step Laser-Induced Surface Modification: A New Strategy for the Batch Fabrication of Sensors. Sens. Actuators B Chem. 2022, 350, 130834. [Google Scholar] [CrossRef]
- Bai, N.; Wang, L.; Xue, Y.; Wang, Y.; Hou, X.; Li, G.; Zhang, Y.; Cai, M.; Zhao, L.; Guan, F.; et al. Graded Interlocks for Iontronic Pressure Sensors with High Sensitivity and High Linearity over a Broad Range. ACS Nano 2022, 16, 4338–4347. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, N.; Yang, Z.; Yuan, Y.; Xu, H.; Wu, G.; Zheng, W.; Ji, X.; Bai, N.; Wang, W.; et al. Iontronic Capacitance-Enhanced Flexible Three-Dimensional Force Sensor with Ultrahigh Sensitivity for Machine-Sensing Interface. IEEE Electron Device Lett. 2023, 44, 2023–2026. [Google Scholar] [CrossRef]
- Zheng, W.; Zhao, Y.; Xu, H.; Yuan, Y.; Wang, W.; Gao, L. Stretchable Iontronic Pressure Sensor Array with Low Crosstalk and High Sensitivity for Epidermal Monitoring. IEEE Electron Device Lett. 2023, 44, 516–519. [Google Scholar] [CrossRef]
- Huang, C.; He, O.; Lao, Z.; Liu, H.; Leng, Y.; Xu, X.; Tian, S.; Wang, Y.; Wu, G.; Li, R.; et al. Dynamic Peripheral Hemoperfusion Distribution Monitoring Based on Janus Flexible Sensor System. IEEE Trans. Biomed. Eng. 2024, 71, 2580–2589. [Google Scholar] [CrossRef] [PubMed]
- Chai, J.; Wang, X.; Li, X.; Wu, G.; Zhao, Y.; Nan, X.; Xue, C.; Gao, L.; Zheng, G. A Dual-Mode Pressure and Temperature Sensor. Micromachines 2024, 15, 179. [Google Scholar] [CrossRef]
- Yang, C.; Liu, H.; Ma, J.; Xu, M. Multimodal Flexible Sensor for the Detection of Pressing–Bending–Twisting Mechanical Deformations. ACS Appl. Mater. Interfaces 2025, 17, 2413–2424. [Google Scholar] [CrossRef]
- Yang, Z.; Duan, Q.; Zang, J.; Zhao, Y.; Zheng, W.; Xiao, R.; Zhang, Z.; Hu, L.; Wu, G.; Nan, X.; et al. Boron Nitride-Enabled Printing of a Highly Sensitive and Flexible Iontronic Pressure Sensing System for Spatial Mapping. Microsyst. Nanoeng. 2023, 9, 68. [Google Scholar] [CrossRef]
- Shi, J.; Dai, Y.; Cheng, Y.; Xie, S.; Li, G.; Liu, Y.; Wang, J.; Zhang, R.; Bai, N.; Cai, M.; et al. Embedment of Sensing Elements for Robust, Highly Sensitive, and Cross-Talk–Free Iontronic Skins for Robotics Applications. Sci. Adv. 2023, 9, eadf8831. [Google Scholar] [CrossRef]
- Yuan, Y.; Xu, H.; Zheng, W.; Liu, M.; Li, S.; Yan, J.; Wang, D.; Liu, K.; Zhang, H.; Chen, G.; et al. Bending and Stretching-Insensitive, Crosstalk-Free, Flexible Pressure Sensor Arrays for Human-Machine Interactions. Adv. Mater. Technol. 2024, 9, 2301615. [Google Scholar] [CrossRef]
- Kumaresan, Y.; Ozioko, O.; Dahiya, R. Multifunctional Electronic Skin with a Stack of Temperature and Pressure Sensor Arrays. IEEE Sens. J. 2021, 21, 26243–26251. [Google Scholar] [CrossRef]
- Choi, S.B.; Noh, T.; Jung, S.; Kim, J. Stretchable Piezoresistive Pressure Sensor Array with Sophisticated Sensitivity, Strain-Insensitivity, and Reproducibility. Adv. Sci. 2024, 11, 2405374. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, W.; Zhao, C.; Li, W.; Dong, E.; Xu, M.; Huang, H.; Yang, Y.; Li, L.; Zheng, L.; et al. Breaking the Saturation of Sensitivity for Ultrawide Range Flexible Pressure Sensors by Soft-Strain Effect. Adv. Mater. 2024, 36, 2405405. [Google Scholar] [CrossRef]
- Luo, H.; Chen, X.; Li, S.; Xu, J.; Li, X.; Tian, H.; Wang, C.; Li, B.; Zhang, M.; Sun, B.; et al. Bioinspired Suspended Sensing Membrane Array with Modulable Wedged-Conductive Channels for Crosstalk-Free and High-Resolution Detection. Adv. Sci. 2024, 11, 2403645. [Google Scholar] [CrossRef]
- Cao, Y.; Li, P.; Zhu, Y.; Wang, Z.; Tang, N.; Li, Z.; Cheng, B.; Wang, F.; Chen, T.; Sun, L. Artificial Intelligence-Enabled Novel Atrial Fibrillation Diagnosis System Using 3D Pulse Perception Flexible Pressure Sensor Array. ACS Sens. 2025, 10, 272–282. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Li, K.; Li, Z.; Wang, W.; Yu, X.; Zhang, T.; Yang, X. Flexible Pressure Sensor Arrays with High Sensitivity and High Density Based on Spinous Microstructures for Carved Patterns Recognition. Adv. Funct. Mater. 2024, 2417238. [Google Scholar] [CrossRef]
- Ha, M.; Lim, S.; Cho, S.; Lee, Y.; Na, S.; Baig, C.; Ko, H. Skin-Inspired Hierarchical Polymer Architectures with Gradient Stiffness for Spacer-Free, Ultrathin, and Highly Sensitive Triboelectric Sensors. ACS Nano 2018, 12, 3964–3974. [Google Scholar] [CrossRef]
- Xue, F.; Zheng, H.; Peng, Q.; Hu, Y.; Zhao, X.; Xu, L.; Li, P.; Zhu, Y.; Liu, Z.; He, X. An Ultra-Broad-Range Pressure Sensor Based on a Gradient Stiffness Design. Mater. Horiz. 2021, 8, 2260–2272. [Google Scholar] [CrossRef]
- Wang, Y.; Adam, M.L.; Zhao, Y.; Zheng, W.; Gao, L.; Yin, Z.; Zhao, H. Machine Learning-Enhanced Flexible Mechanical Sensing. Nano-Micro Lett. 2023, 15, 55. [Google Scholar] [CrossRef]
- Xu, H.; Zheng, W.; Zhang, Y.; Zhao, D.; Wang, L.; Zhao, Y.; Wang, W.; Yuan, Y.; Zhang, J.; Huo, Z.; et al. A Fully Integrated, Standalone Stretchable Device Platform with in-Sensor Adaptive Machine Learning for Rehabilitation. Nat. Commun. 2023, 14, 7769. [Google Scholar] [CrossRef]
- Matsuda, R.; Mizuguchi, S.; Nakamura, F.; Endo, T.; Isoda, Y.; Inamori, G.; Ota, H. Highly Stretchable Sensing Array for Independent Detection of Pressure and Strain Exploiting Structural and Resistive Control. Sci. Rep. 2020, 10, 12666. [Google Scholar] [CrossRef]
- Cui, J.; Li, X.; Zeng, F.; Bai, H. Study on Contact Stress Distribution Characteristics and Damage of Plug Seedlings Based on Flexible Pressure Sensor. Sensors 2023, 23, 8175. [Google Scholar] [CrossRef]
- Dong, Y.; Xia, T.; Fang, X.; Zhang, Z.; Xi, L. Prognostic and Health Management for Adaptive Manufacturing Systems with Online Sensors and Flexible Structures. Comput. Ind. Eng. 2019, 133, 57–68. [Google Scholar] [CrossRef]
- Mei, S.; Yi, H.; Zhao, J.; Xu, Y.; Shi, L.; Qin, Y.; Jiang, Y.; Guo, J.; Li, Z.; Wu, L. High-Density, Highly Sensitive Sensor Array of Spiky Carbon Nanospheres for Strain Field Mapping. Nat. Commun. 2024, 15, 3752. [Google Scholar] [CrossRef]
- Xu, H.; Zheng, W.; Wang, Y.; Xu, D.; Zhao, N.; Qin, Y.; Yuan, Y.; Fan, Z.; Nan, X.; Duan, Q.; et al. Flexible Tensile Strain-Pressure Sensor with an off-Axis Deformation-Insensitivity. Nano Energy 2022, 99, 107384. [Google Scholar] [CrossRef]
- Kim, S.J.; Mondal, S.; Min, B.K.; Choi, C.-G. Highly Sensitive and Flexible Strain–Pressure Sensors with Cracked Paddy-Shaped MoS2 /Graphene Foam/Ecoflex Hybrid Nanostructures. ACS Appl. Mater. Interfaces 2018, 10, 36377–36384. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturing Technique | Advantages | Challenges | Suitability for Applications | Cost-Effectiveness | Scalability | Sensor Resolution | Material Compatibility |
|---|---|---|---|---|---|---|---|
| 3D Printing | Complex structures can be manufactured, customised designs, high design freedom. | Slow production speeds, limited choice of materials and restricted mechanical properties of the end product, especially with low modulus materials can lead to performance problems. | Suitable for complex, customised designs, especially in low volume production and sensor applications requiring a high degree of design freedom. | Moderate to high; equipment and materials can be expensive, but small batches and custom designs may reduce cost. | Low to moderate; not ideal for mass production due to slow speed and material limitations | Moderate to high resolution, but dependent on material and printing quality. Can create fine details but may lack high precision. | Limited to specific materials (e.g., thermoplastics, some conductive inks); challenges with high-conductivity or high-temperature materials. |
| Screen Printing | Cost-effective, fast production, mass-producible, suitable for relatively simple designs. | Lower resolution, not suitable for complex designs, susceptible to substrate instability leading to pattern misalignment. | Suitable for mass production and low-cost sensor fabrication, it is commonly used in applications such as electronic labels and touch screens. | Low; one of the most cost-effective methods, especially for large-volume production. | High; ideal for mass production with low to moderate design complexity. | Low resolution, suitable for less intricate patterns. | Compatible with a wide range of inks (conductive, non-conductive); limited by the substrate’s flexibility. |
| Laser Etching | High precision, suitable for complex patterns, fine machining of micron-sized structures. | May lead to thermal deformation of the material, susceptible to thermal deformation, especially with flexible substrates. | Suitable for high-precision and complex geometry sensor fabrication, especially for applications requiring micron-level accuracy. | Moderate; setup costs for laser systems are high, but precision improves performance and reduces errors. | Moderate; slower process limits scalability for very large production volumes. | Very high resolution (micron-level); excellent for fine and precise features. | Primarily works with metals, thin films, and some polymers; material type and thickness can affect results. |
| Sputtering | High precision control of film thickness and uniformity, suitable for high performance applications, stable performance especially in harsh environments. | Slower deposition speeds and limited choice of materials, especially flexible substrates may affect film adhesion. | Suitable for high-performance thin-film sensors, such as high-temperature-resistant and highly conductive sensors, which are widely used in thin-film electronics and optoelectronic devices. | Moderate to high; equipment is costly, but performance and longevity of sensors can justify investment. | Low to moderate; slower deposition rate and material limitations hinder large-scale manufacturing. | High resolution for thin films and uniform deposition. | Compatible with a variety of materials, including metals, alloys, and some dielectrics; material flexibility and film adhesion are critical. |
| Molding | High productivity, suitable for mass production, simple process. | Limited by material rheology and mould design, hard materials may affect mould stability. | Suitable for high volume production, commonly used in sensor fabrication on plastic or polymer substrates, such as flexible touchscreens and wearable devices. | High; particularly cost-effective for large batches of simple sensor designs. | Very high; ideal for high-volume production with relatively simple designs. | Moderate resolution; limited by mold design and material flow properties. | Limited by material flow characteristics; works well with thermoplastics and elastomers, but difficult with complex, multilayered materials. |
| Materials | Substrate and Package Materials | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Performances | PET | PI | PDMS | PEN | TPU | PVA | PE | PU | PVC | PLA | PAM | PA | Fabrics | |
| Flexible | √ | √ | √ | √ | √ | √ | √ | √ | ⅹ | √ | √ | √ | √ | |
| Heat-resistant | √ | √ | √ | √ | √ | ⅹ | ⅹ | √ | ⅹ | ⅹ | ⅹ | √ | √ | |
| Long-term stability | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | |
| Interface bonding | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | |
| Materials | Electrode Materials | ||||||
|---|---|---|---|---|---|---|---|
| Performances | Conductive Silver Paste | Liquid Metals | Copper/Gold Plated | Carbon Based | PEDOT:PSS | Silver Nanowires | |
| Flexible | √ | √ | ⅹ | √ | √ | √ | |
| Heat-resistant | √ | ⅹ | √ | √ | ⅹ | √ | |
| Long-term stability | √ | √ | √ | √ | √ | √ | |
| Interface bonding | √ | √ | √ | √ | √ | √ | |
| Materials | Sensitive Materials | ||||||
|---|---|---|---|---|---|---|---|
| Performances | Nanofibres | Polymer | Conductive Fillers | Organic Frameworks | Hydrogel | Metals | |
| Flexible | √ | √ | √ | √ | √ | ⅹ | |
| Heat-resistant | √ | √ | √ | ⅹ | ⅹ | √ | |
| Long-term stability | √ | √ | √ | √ | √ | √ | |
| Interface bonding | √ | √ | √ | √ | √ | √ | |
| Materials | Array Size | Sensitivity | Detection Range | Detection Limit | Response Time | Durability |
|---|---|---|---|---|---|---|
| TPU/h-BN [7] | 6 × 9 | 3.997 kPa−1 | 0–100 kPa | 4.7 Pa | 120 ms | 5000 cycles |
| ANF/Ti3C2Tx [150] | 4 × 4 | 521.69 kPa−1 | 0–200 kPa | 0.22 Pa | 17 ms | 10,000 cycles |
| TPU/h-BN [154] | 15 × 15 | 261.4 kPa−1 | 0.05–450 kPa | 50 Pa | 15 ms | 5000 cycles |
| PDMS/CNT [155] | 28 × 28 | 174 kPa−1 | 0.15 Pa–400 kPa | Not known | 2.74 ms | 10,000 cycles |
| PI/Ti3C2Tx/Cu [156] | 8 × 8 | 21.5 kPa−1 | 0.5–410 kPa | 140 Pa | 60 ms | 8000 s |
| PDMS/CNT/PEDOT:PSS [157] | 8 × 8 | 2.32 kPa−1 | 0–10 kPa | Not known | 2.5 s | 250 cycles |
| PBU/AgNW [158] | 10 × 10 | 888.79 kPa−1 | 1–100 kPa | 0.4608 Pa | 66 ms | 10,000 cycles |
| PDMS/PEDOT:PSS [29] | 10 × 1 | 38.1 Ω/mmHg | 0–30 mmHg | Not known | 660 ms | 200 cycles |
| PDMS/Ecoflex/Au [159] | 2 × 5 | >5.22 MPa−1 | 45 Pa–4.1 Mpa | Not known | 30 ms | 5000 cycles |
| PDMS/CNT [160] | 8 × 8 | 0.19 kPa−1 | 0–400 kPa | Not known | 80 ms | 10,000 cycles |
| Ionic gel [161] | 3 × 5 | >0.77 kPa−1 | 0–40 kPa | Not known | Not known | Not known |
| PDMS/TPU/Conductive ink [162] | 64 × 64 | 10.50 kPa−1 | 0–130 kPa | 1 Pa | 69 ms | 45,000 cycles |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Chai, J.; Zhan, Y.; Cui, D.; Wang, X.; Gao, L. Design, Fabrication, and Application of Large-Area Flexible Pressure and Strain Sensor Arrays: A Review. Micromachines 2025, 16, 330. https://doi.org/10.3390/mi16030330
Zhang X, Chai J, Zhan Y, Cui D, Wang X, Gao L. Design, Fabrication, and Application of Large-Area Flexible Pressure and Strain Sensor Arrays: A Review. Micromachines. 2025; 16(3):330. https://doi.org/10.3390/mi16030330
Chicago/Turabian StyleZhang, Xikuan, Jin Chai, Yongfu Zhan, Danfeng Cui, Xin Wang, and Libo Gao. 2025. "Design, Fabrication, and Application of Large-Area Flexible Pressure and Strain Sensor Arrays: A Review" Micromachines 16, no. 3: 330. https://doi.org/10.3390/mi16030330
APA StyleZhang, X., Chai, J., Zhan, Y., Cui, D., Wang, X., & Gao, L. (2025). Design, Fabrication, and Application of Large-Area Flexible Pressure and Strain Sensor Arrays: A Review. Micromachines, 16(3), 330. https://doi.org/10.3390/mi16030330