1. Introduction
Metal matrix composites (MMCs) are engineered by embedding hard reinforcement materials, such as particles, fibers, or whiskers, into a ductile metallic matrix. This reinforcement enhances the interface between the matrix and the reinforcer, thereby facilitating the transfer of external loads to the metal matrix. Particle-reinforced metal matrix composites (PRMMCs) are particularly valued for their superior properties, including high specific strength, high specific stiffness, and excellent thermal conductivity [
1]. Among these, SiC particle-reinforced aluminum matrix composites (SiCp/Al) stand out due to their combination of these desirable properties, along with enhanced wear resistance, a low coefficient of thermal expansion, and excellent dimensional stability. As a result, SiCp/Al composites are widely utilized in high-performance applications in industries such as aerospace, automotive, and manufacturing [
2,
3].
Grinding is typically the final process in the manufacturing of a machined part. However, in the case of SiCp/Al composites, conventional grinding methods often fail to meet the required processing standards due to the difference in material properties between the soft matrix and the hard, wear-resistant reinforcing particles [
4]. Researchers have explored alternative machining techniques, such as laser machining. Although laser processing can achieve high material removal rates [
5], the elevated temperatures generated during the process can adversely affect the material’s interior, making it unsuitable for applications involving cavity machining [
6]. Water jet machining has also been investigated as a potential solution. Although water jets avoid the issues of macroscopic force and heat-affected zones, they are not suitable for precision machining [
7]. Guo et al. [
8] conducted a comprehensive investigation into the surface integrity and material removal mechanisms of silicon carbide particle-reinforced aluminum matrix composites (SiCp/Al composites) during high-speed grinding processes, with particular focus on elucidating the brittle-to-ductile transition occurring at critical grinding velocity.
Ultrasonic vibration-assisted grinding (UVAG) adds ultrasonic vibration to the tool to realize the periodic contact and separation between the tool and the workpiece, which improves the machining efficiency and the machined surface quality, and reduces the grinding force. The removal modes of SiCp/Al composites include brittle removal and plastic removal. Current research efforts remain insufficient in systematically investigating UVAG techniques [
9,
10], which demonstrate significant potential for enhancing both machining quality and processing efficiency. Moreover, the complex surface morphology generated by UVAG necessitates comprehensive characterization and validation to establish the rationality of surface integrity evaluation, presenting a critical knowledge gap requiring multi-parameter analysis beyond conventional assessment metrics [
11]. Lin et al. [
12] conducted cutting tests on SiCp/Al composites with a 20% volume fraction of SiC and observed that machining-induced stress concentrations near the particles often lead to microcrack formation on the shear surface. As cracks propagate, particle fragmentation occurs, resulting in discontinuous chips. The chip morphology was found to be dependent on the SiC particle volume fraction and cutting parameters. Gallab [
13] investigated the turning of SiCp/Al composites with a 20% SiC volume fraction and examined the influence of cutting parameters on both the removal mode and surface quality. He found that SiC particles were primarily removed by debonding and crushing, leaving defects such as voids and microcracks on the aluminum matrix surface. Increased feed rates and depth of cut were found to promote chip chipping and discontinuous chip formation, which deteriorated surface quality. On the other hand, increasing cutting speed favored plastic removal and enhanced the material removal rate. Zhao et al. [
14] conducted a single-grit scratch test to explore the material removal mechanism of SiCp/Al composites. Their findings indicated that the macroscopic removal process closely resembled that of the aluminum matrix, with both plowing and shear zones. The removal process involved a coupling of plastic removal of the aluminum matrix and brittle removal of SiC particles. The presence of SiC particles induced tearing and cracking of the matrix, while the aluminum matrix surrounding the SiC particles increased their plasticity, thus enhancing the likelihood of plastic removal of SiC particles. However, the particle removal mechanism remains primarily dependent on experimental observations and is difficult to predict and control, although surface quality can be managed by adjusting process parameters.
Due to defects such as pits being generated when SiC particles are removed, the surface roughness of SiCp/Al composites tends to be high after the grinding process. Yin et al. [
15] established an analytical model for the grinding force of SiCp/Al composites and examined the surface morphology after grinding. Their study established a relationship between processing parameters and surface characteristics, and through parameter optimization, they achieved a surface roughness of 0.6 µm. Li et al. [
16] investigated the correlation between grinding wheel wear and surface defects during the grinding process of particle-reinforced aluminum matrix composites, and they found that applying ultrasonic vibration assistance during grinding significantly improved the surface quality of the material. Feng et al. [
17] conducted a comparison test between ultrasonic vibration-assisted scratching and normal scratching on SiCp/Al composites. Their results demonstrated that ultrasonic vibration-assisted scratching enhanced surface quality and minimized internal damage to the workpiece. Gu et al. [
18] used ultrasonic vibration-assisted grinding to process SiCp/Al composites, and analyzed the resulting surface morphology, combined with the axial ultrasonic vibration influence coefficient, the grinding surface roughness model was constructed, and the maximum error of the model was 3.64%. Zheng et al. [
19] investigated the surface formation mechanisms of conventional grinding and UVAG through finite element simulations. A comparative analysis of the two mechanisms was conducted to elucidate the advantages of UVAG in achieving superior surface quality. Building upon these findings, the surface characteristics of UAG were further analyzed. The surface morphology was systematically evaluated and validated using multiple metrics, including surface roughness, fractal dimension, skewness, and surface anisotropy. This multi-parameter approach addresses the limitations of relying solely on surface roughness or fractal dimension to characterize machined surfaces.
In this study, orthogonal tests were designed to investigate the grinding mechanism of SiCp/Al composites, the distribution of different grinding forces during the process was analyzed, and the mode of SiC particle removal was examined. The surface morphology and roughness of the material after grinding were evaluated. Additionally, the relationship between ultrasonic vibration parameters, machining parameters, and surface roughness was explored, with the aim of improving surface quality and identifying the optimal combination of machining parameters.
3. Results and Analysis
3.1. Analysis of UVAG Force and Removal Mechanism
The removal mechanism of SiC particles is closely related to the surface quality achieved after processing, with both brittle and plastic removal modes observed during the grinding process. Since SiC particles are brittle materials, based on the fracture mechanism of brittle materials, controlling the critical grinding depth can control the plastic removal of brittle materials. The condition for determining the brittle-to-plastic transition is based on the relative size of the maximum undeformed chip thickness and the critical chip thickness. When the maximum undeformed chip thickness is smaller than the critical chip thickness of the material, the brittle material is removed in a plastic manner. Conversely, when the maximum undeformed chip thickness exceeds the critical value, the material undergoes brittle removal. In this study, the indentation mechanics method is used to describe the composite material force, based on the Griffith fracture energy theory and the critical chip thickness model of brittle material without cracks constructed by Bifano et al. [
20]. Wang et al. [
21] found that the dynamic fracture toughness of brittle material is 0.3 times of the static one in dynamic machining, and the improved critical chip thickness model is calculated as:
where
is Young’s modulus,
is the hardness of the material,
is the dynamic fracture toughness of the material,
= 0.3
,
is the static fracture toughness of the material,
is the model parameter, which is 0.15, and
is the correction parameter considering the machining process.
The maximum undeformed chip thickness is calculated as follows:
where
is the number of abrasive grains,
is the ultrasonic vibration arc length, and
is a model parameter.
Ultrasonic vibration-assisted grinding increases the contact arc length, resulting in a reduction in the maximum undeformed chip thickness. This facilitates a shift toward plastic removal compared to conventional grinding. When the maximum undeformed chip thickness is smaller than the critical chip thickness, the SiC particles are primarily removed plastically, and the SiCp/Al composites are subjected to grinding forces such as rubbing force, plowing force, and chip formation force. Conversely, when the maximum undeformed chip thickness exceeds the critical chip thickness, brittle fracture of SiC particles occurs, and the grinding forces also include particle fracture force, which increases the overall grinding force, which leads to an increase in the grinding force.
Under different chip thickness conditions, the material removal mechanism was applied, with the process parameters substituted to obtain the fourth and seventh test groups where
<
, indicating plastic removal without the involvement of particle fracture force. In contrast, for the remaining groups where
>
, particle fracture force contributes to the grinding force, leading to brittle removal. The composition of ground forces in this section is derived from theoretical analysis based on an analytical model, while the specific material removal mechanisms occurring during the grinding process are discussed in
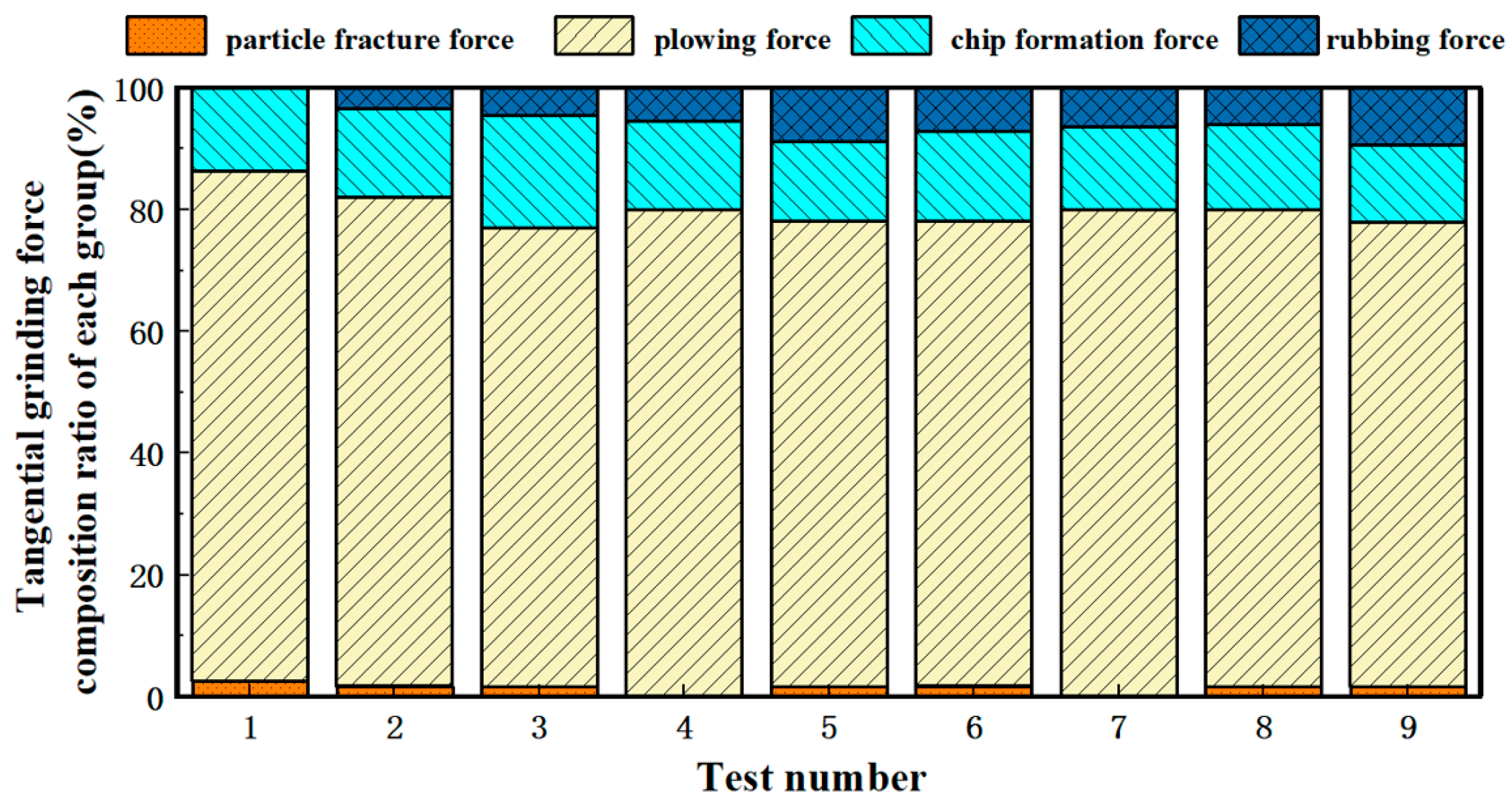
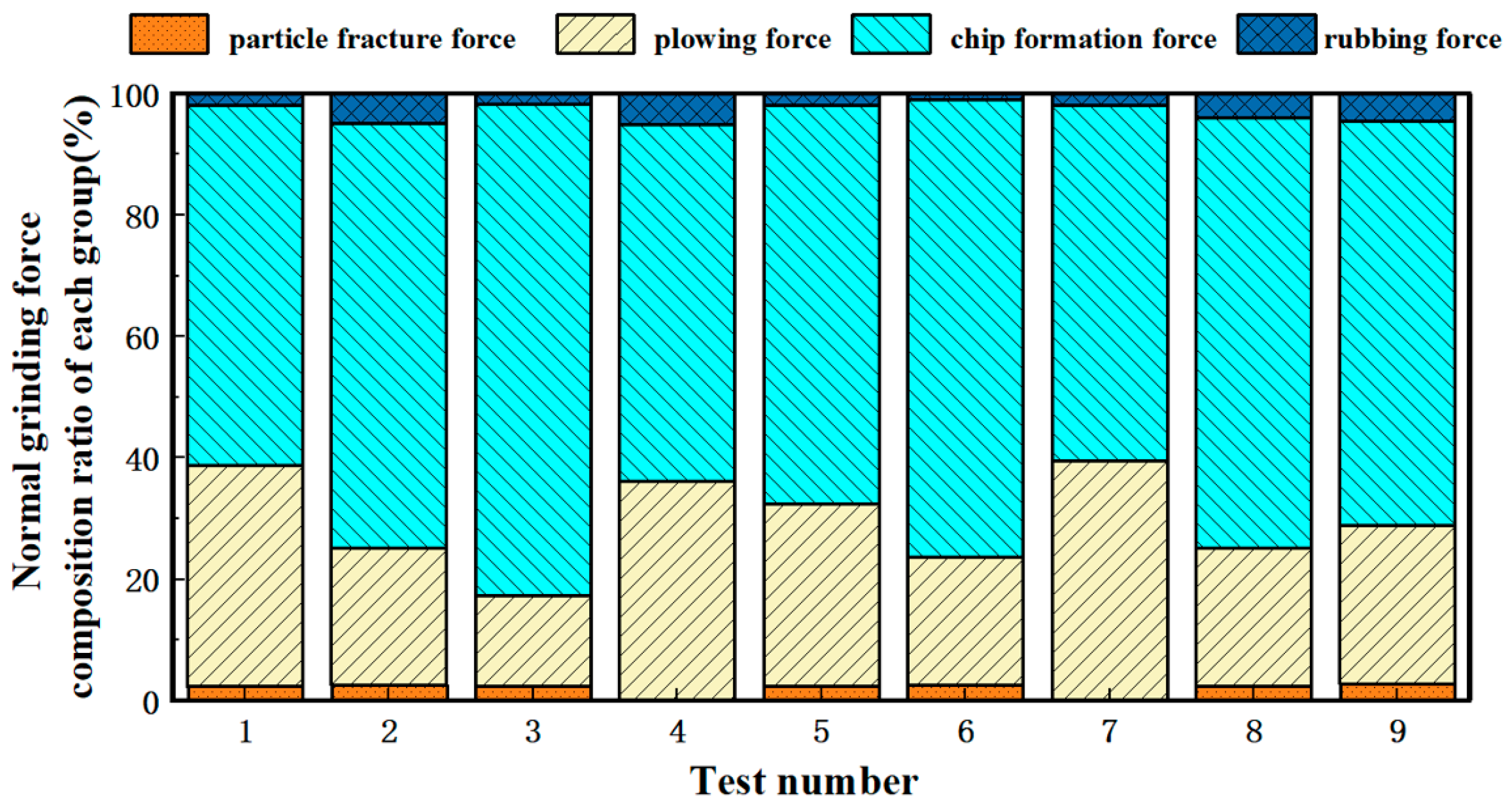
Section 3.2 through experimental analysis utilizing SEM (scanning electron microscopy) imaging. The material removal mechanisms during grinding were evaluated based on the proposed formulations, with force component ratios simulated through MATLABR2023A software, as illustrated in
Figure 3 and
Figure 4. The results demonstrate that the plowing force dominates the tangential grinding force, while the chip formation force constitutes the primary component of the normal grinding force. This phenomenon may be attributed to the intensified abrasive wear caused by the presence of SiC particles. Furthermore, the substantial heat generation during grinding promotes adhesion between abrasives and workpiece surfaces. Such adhesive interactions reduce the effective grinding depth, shifting most surface material removal to a plowing mechanism rather than direct cutting. In the tangential direction, the plow phenomenon is the main removal method, which leads to an increase in the plowing force; in the normal direction, the diameter cutting is still the dominant removal method, with cutting and forming forces being the most significant contributors.
3.2. SEM Test Results and Analysis
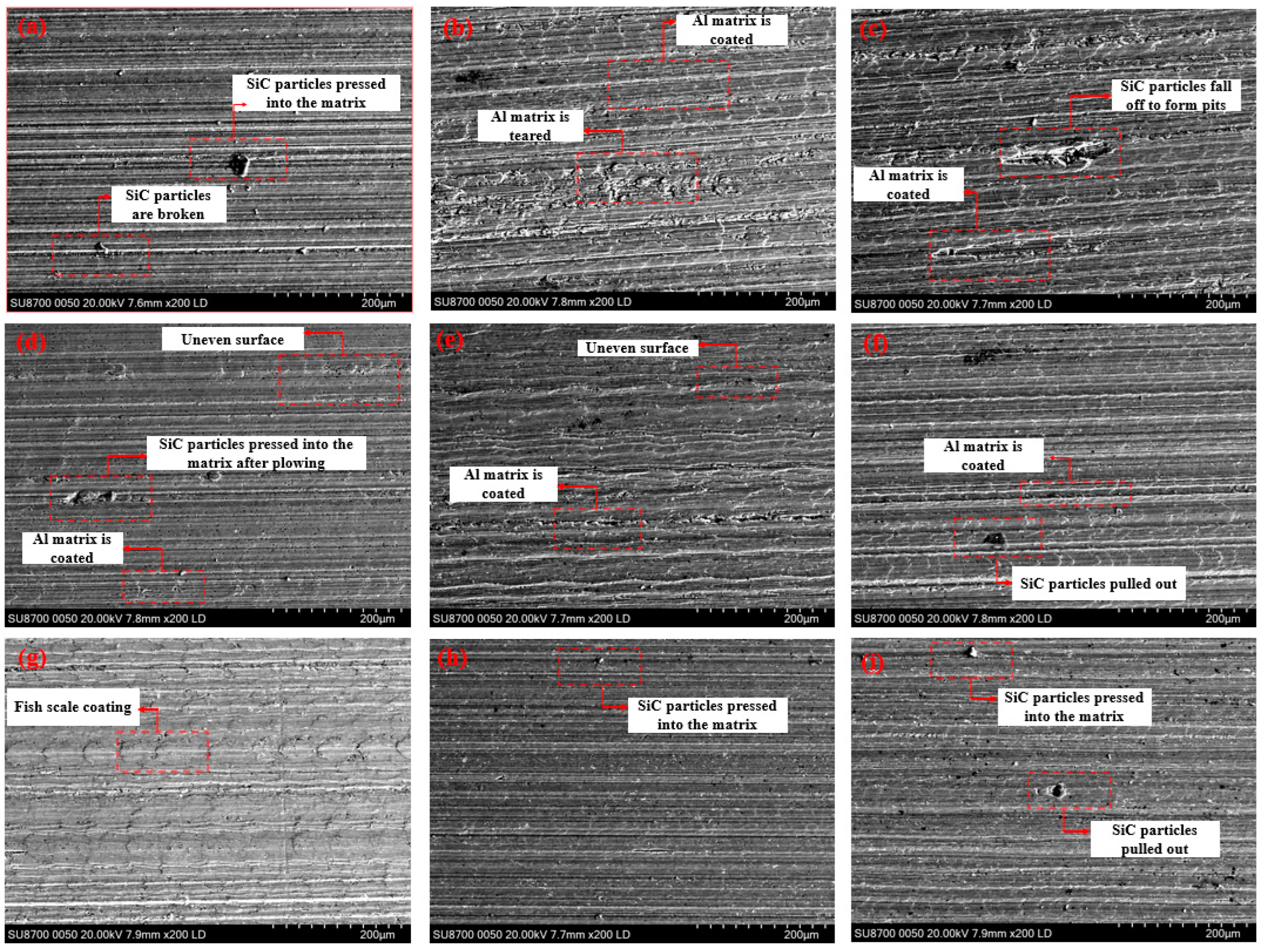
Figure 5 shows the observed surface morphology of each orthogonal test workpiece after ultrasonic vibration-assisted grinding. It can be seen that each workpiece surface presents a different surface morphology corresponding to the changes in processing and ultrasonic vibration parameters. It is observed that the surface of specimen 2 is scratched by a large pit, indicating that SiC particles were pulled out during grinding. The ejected particles were subsequently pushed forward by the grinding tool, leaving scratches on the surface. Specimens 1, 4, and 9 have raised particles on the surface and show more regular plastic scratches near the particles, which were pulled out and then pressed into the aluminum matrix by the tool. The surfaces of specimens 5, 6, and 7 are coated areas, proving that at this time the surface of the workpiece was burned, at this time, generated a large grinding heat. Specifically, specimen 7 does not show obvious defects, which suggests that plastic removal of SiC particles occurred at this condition. This observation aligns with the theoretical analysis in
Section 3.1, confirming the plastic removal mechanism. When SiC particles are removed plastically, the surface quality of the workpiece improves.
A comparison of specimens 1 and 7 reveals that under identical grinding depth and ultrasonic amplitude conditions, the surface quality of specimen 7 is superior. This can be attributed to the higher grinding wheel rotational speed of specimen 7, which generates more grinding heat. Although it will lead to defects in the coating of the base material, the temperature increase will lead to a larger strain. When the strain reaches the recrystallization critical strain, grain refinement occurs, enhancing the interface strength between the phases. Consequently, fewer defects such as grain pull-out or indentation are observed, resulting in improved surface quality. It should be noted that surface quality is not inversely proportional to ultrasonic vibration. While ultrasonic vibration is not the sole factor influencing surface quality, higher ultrasonic amplitudes generally yield better surface quality. This improvement may be attributed to the grain refinement promoted by ultrasonic vibration, which also strengthens the interface between the two phases. And it also enhances the strength of the interface between the two phases to reduce the formation of defects, such as particle dislodgement pits, so that the surface quality is better.
3.3. Roughness Results and Analysis
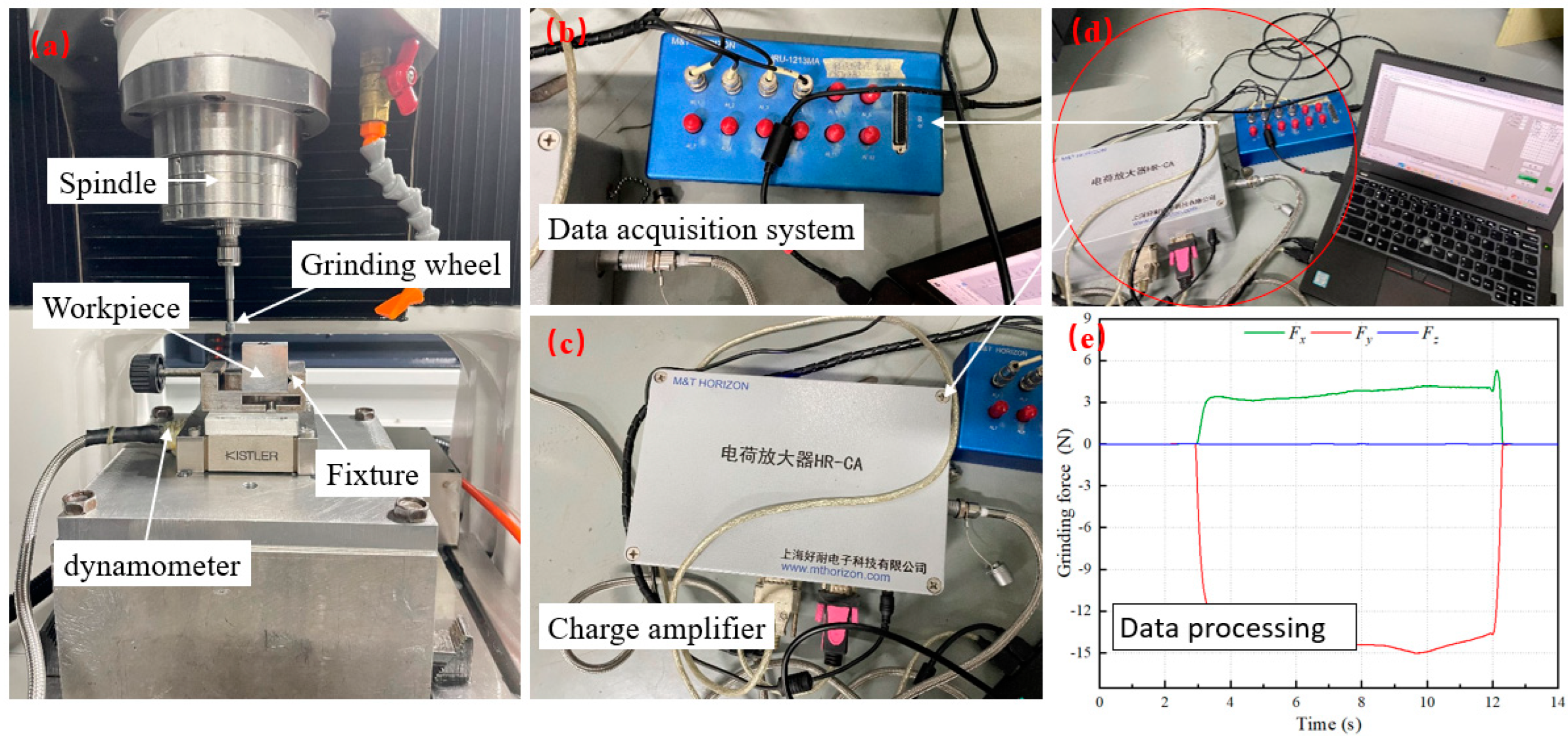
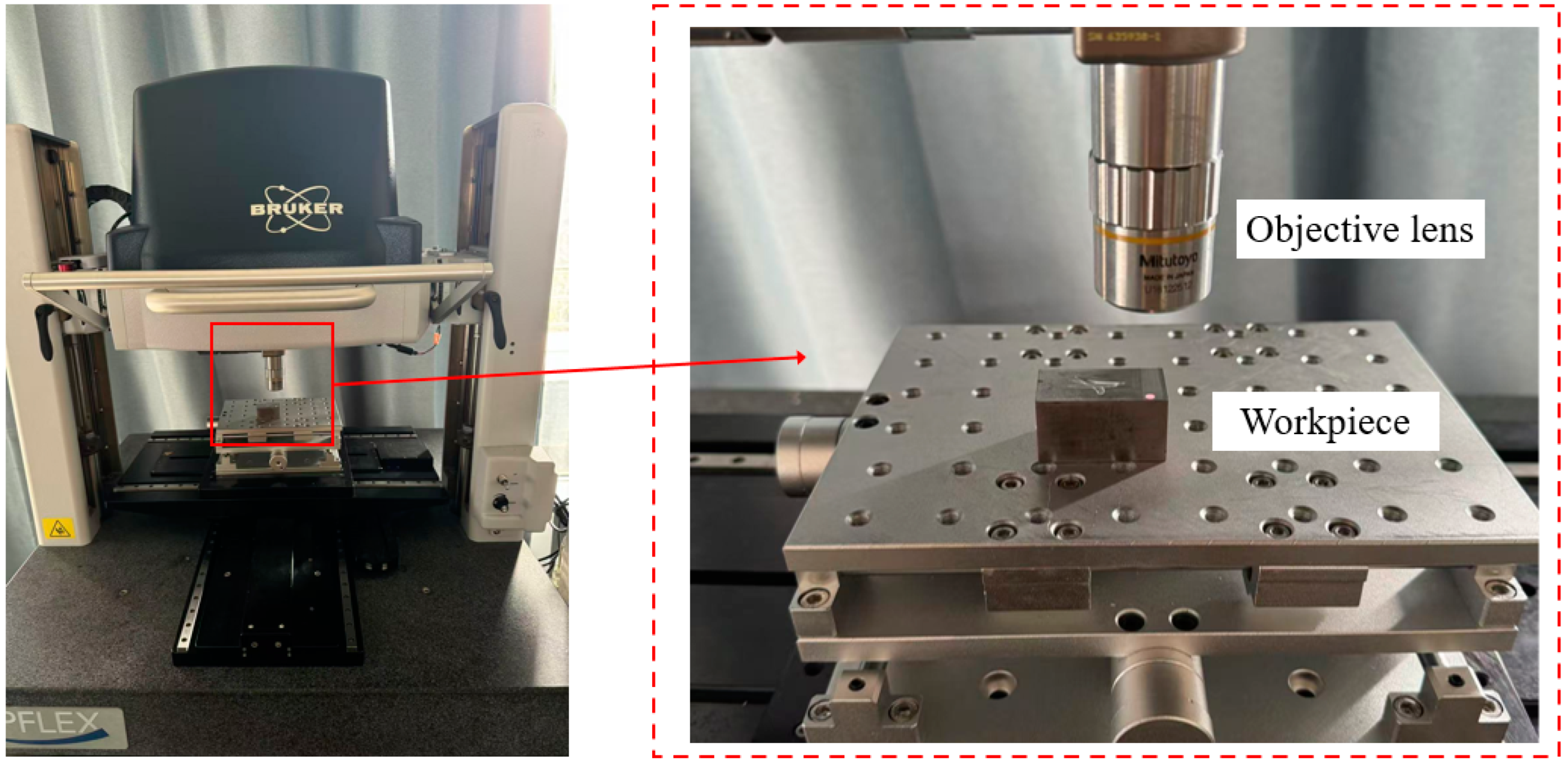
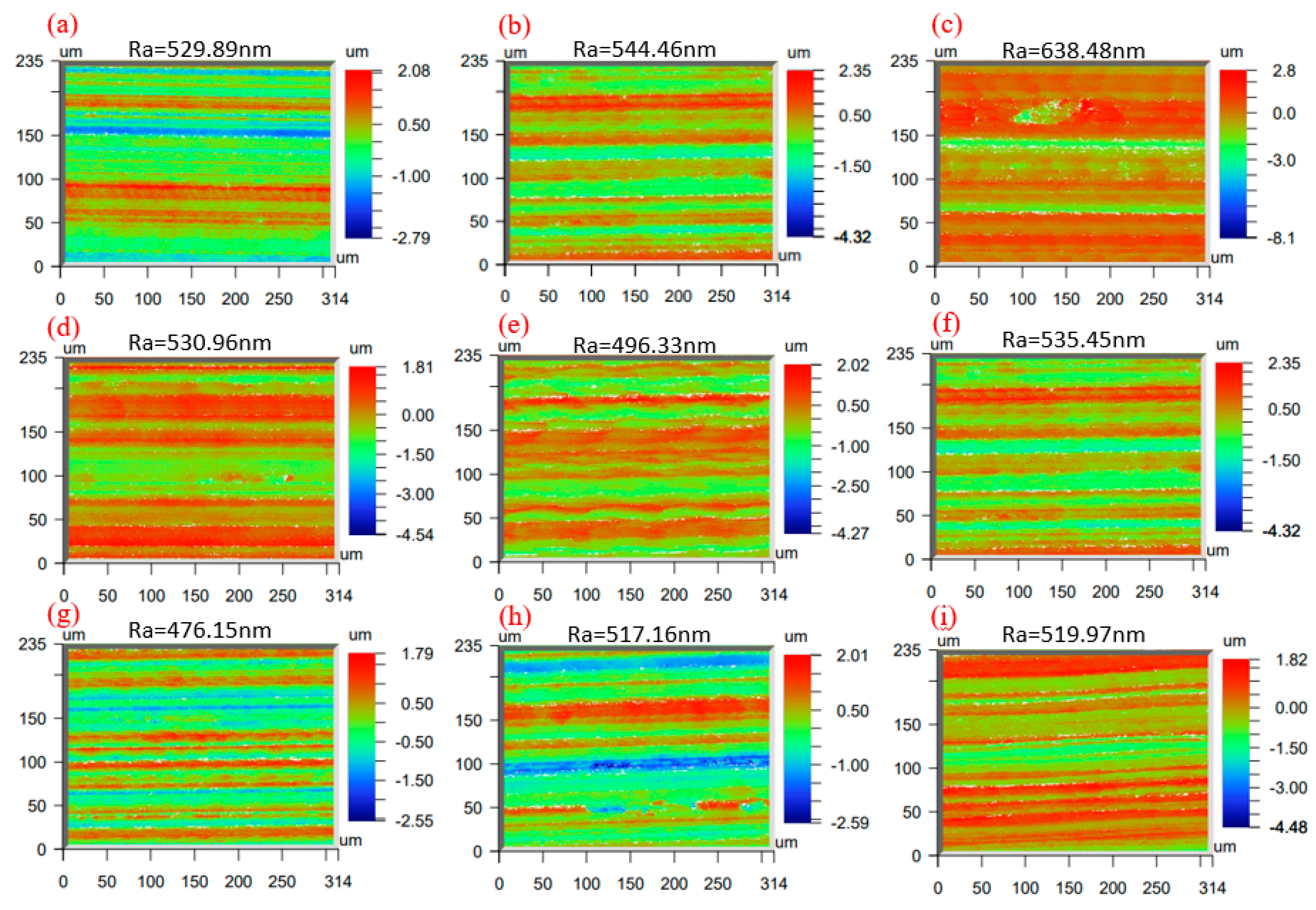
Prior to roughness measurement, an ultrasonic cleaning device was used to clean the grinding surface in order to remove debris and other impurities generated during the machining process. Roughness was measured at five different locations on each workpiece, and the average value of Ra was taken as the surface roughness of the grinding surface; the surface roughness values obtained from the orthogonal grinding test are shown in
Figure 6. The relationship between the process parameters and surface roughness can be established. By comparing the data from groups (a), (b), (c), (g), (h), and (i) in
Figure 6, it is evident that the overall surface roughness in experiments 7–9 is significantly lower than that in experiments 1–3. This suggests that an increase in spindle speed leads to a gradual reduction in surface roughness. The reasons are as follows: the increase in grinding wheel rotational speed leads to more frequency of contact between abrasive grains and workpiece per unit time, which strengthens the cutting action and makes the surface smoother after grinding, and the increase in spindle rotational speed can improve the material removal rate. Concurrently, at elevated speeds, the ultrasonic vibration effect on the abrasive grain path becomes more pronounced, reducing the grinding force’s impact and further improving surface quality.
A horizontal comparison of data within the same row in
Figure 6 reveals that, except for groups (d) and (e), an increase in feed rate consistently elevates surface roughness. While the results of groups 4 and 5 may be influenced by interaction effects such as ultrasonic air pressure, the general trend demonstrates a positive correlation between surface roughness and feed rate. This is primarily due to the presence of SiC particles, which intensify abrasive grain wear and result in greater abrasive grain loss. The higher feed speed will increase the frequency of grinding contact, causing the abrasive grains to become more irregular and resulting in higher surface roughness. Furthermore, the abrasive grains are continuously obstructed by the workpiece, and the increase in the feed speed will increase the obstruction effect, limiting the material’s plastic flow and reducing the efficiency of SiC particle removal. Consequently, the surface quality deteriorates.
The range analysis in
Table 5 indicates that surface roughness increases with grinding depth. However, due to the relatively weaker influence of grinding depth compared to the aforementioned factors, the correlation between grinding depth and roughness cannot be directly discerned. This is due to the reduced heat dissipation capability in the contact area, which leads to a buildup of heat in the grinding zone. The accumulated heat raises the temperature of the grinding area, causing phenomena such as substrate coating, which increases the surface roughness. Additionally, the elevated temperature makes the strength of the interface between the two phases higher, which also makes the surface roughness larger.
Analyzing the effect of ultrasound on the grinding surface roughness, it can be found that ultrasonic vibration can reduce the surface roughness to a certain extent. However, the surface roughness at an air pressure of 0.65 MPa and ultrasonic amplitude is generally higher than that at 0.6 MPa, which indicates that the ultrasonic amplitude does not exhibit a simple linear relationship with surface roughness. When the air pressure is lower, the tool may experience an extrusion effect when in contact with the workpiece under the same machining parameters, leading to the formation of pits on the material surface and resulting in poor surface quality. After adding ultrasonic vibration, there is more hammering contact between the tool and the material, which can break some SiC particles, thus reducing the formation of crater defects and improving the surface quality. However, excessively high ultrasonic amplitude may cause the tool to impact the substrate surface directly, resulting in defects appearing directly on the surface of the workpiece and an increase in surface roughness. Therefore, an optimal ultrasonic amplitude should be selected to achieve the best surface quality after grinding.
The range analysis results of the orthogonal experiment are summarized in
Table 5. The average value 1 in the spindle speed column indicates the mean surface roughness value under the first-level spindle speed parameter (8000 r/min) in the orthogonal experiment, which is derived from three experimental measurements. Other average values should be interpreted similarly. Through subsequent range analysis, the range magnitude can be obtained, thereby enabling determination of the influence degree of different machining parameters on surface roughness values. As evident from the data, spindle speed demonstrated the most pronounced influence on surface roughness, while grinding depth exhibited the minimal effect, indicating that spindle speed is the dominant parameter governing surface quality. The order of significance for processing parameters affecting surface roughness was determined as follows:
>
>
>
. Notably,
and
demonstrated comparable influence magnitudes. Consequently, to achieve superior surface quality, it is recommended to prioritize higher spindle speeds, reduced feed rates, and increased air pressure during machining operations.
Due to the inherent limitations of orthogonal experimental design, this study did not thoroughly investigate the effects of multi-parameter interactions on surface roughness. Future research could incorporate additional experimental points, to develop interaction models among parameters, perform optimization, and identify optimal process parameters. This direction will be critical for advancing subsequent studies.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}