
Design and Control of Upper Limb Rehabilitation Training Robot Based on a Magnetorheological Joint Damper

Abstract
1. Introduction
2. Robot Design
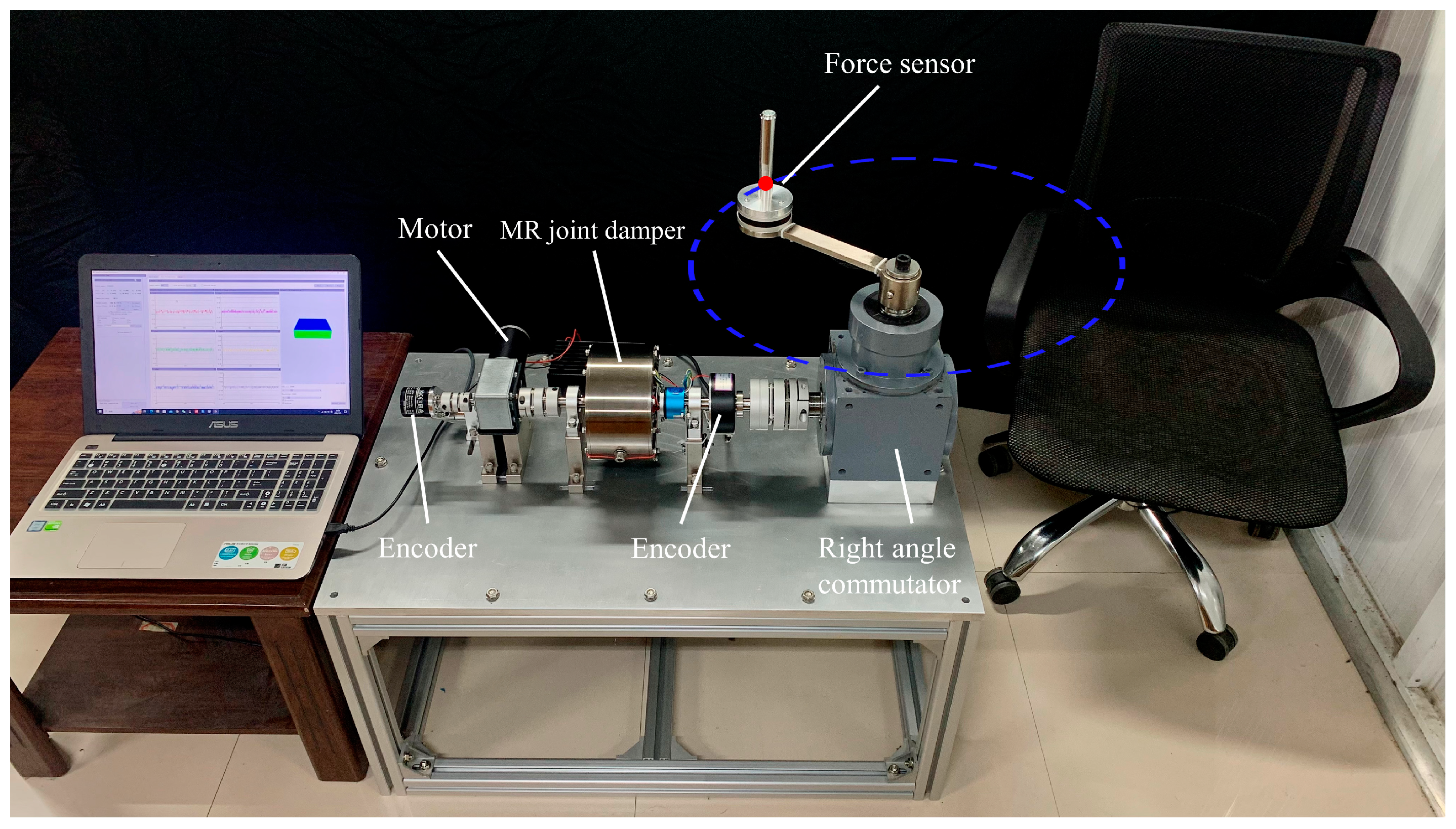
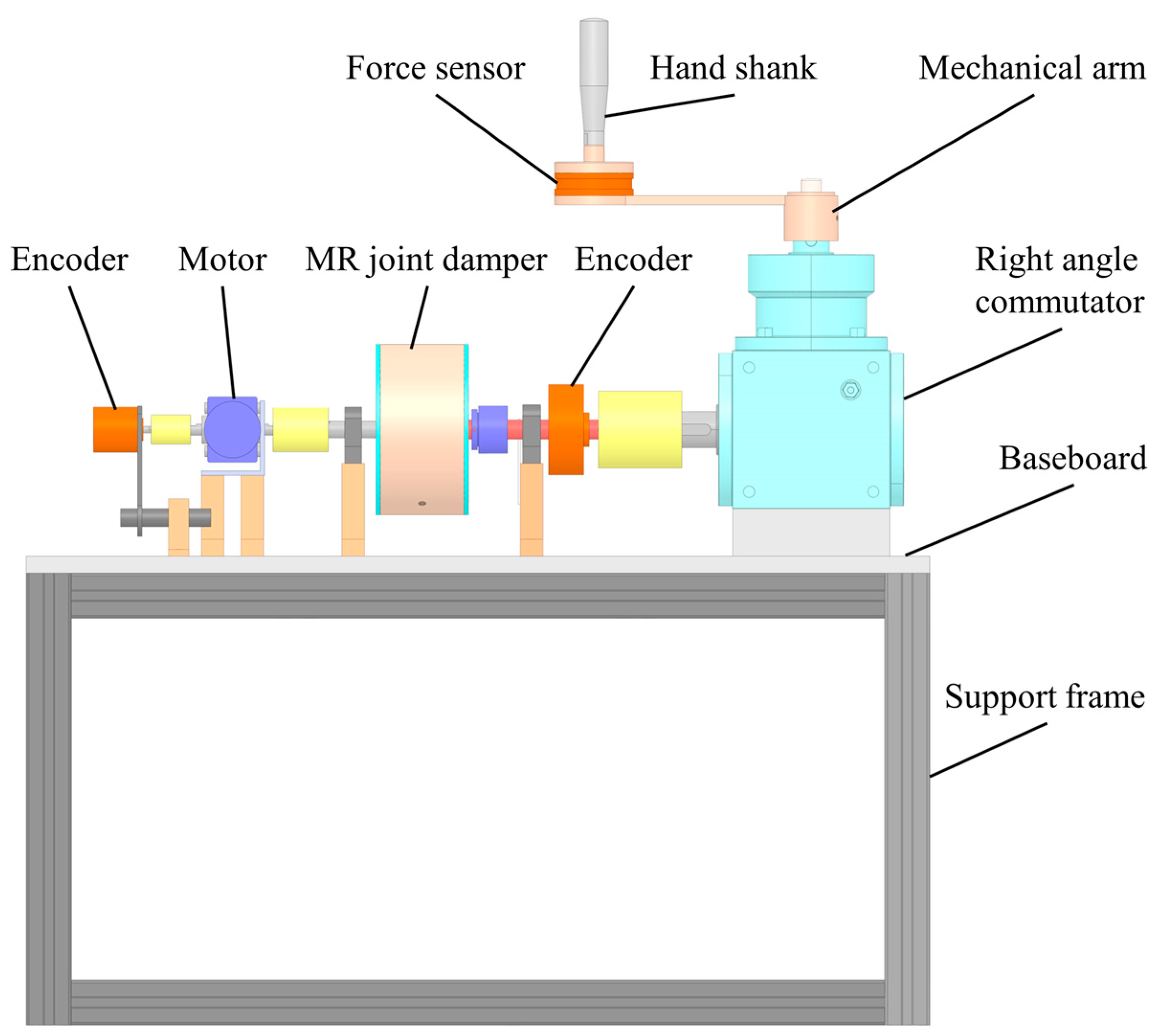
2.1. Mechanical Structure
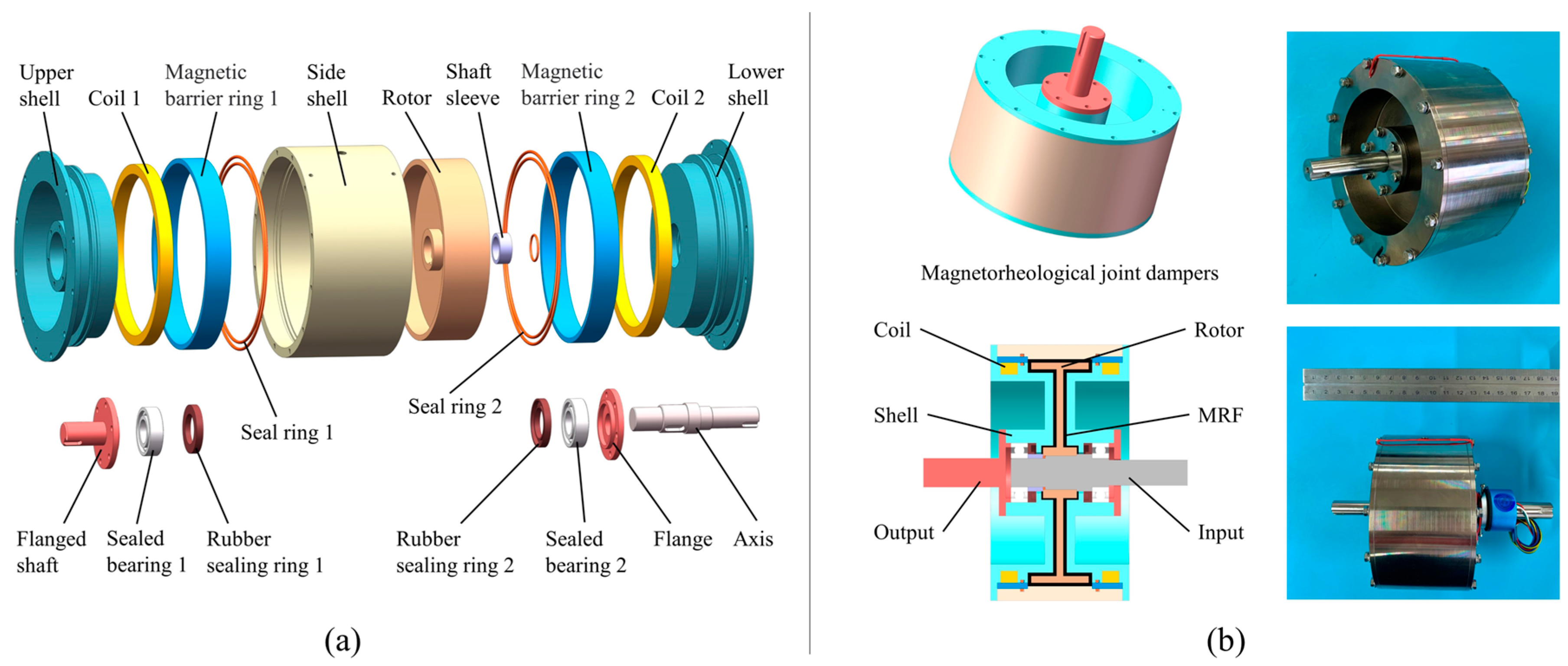
2.2. Magnetorheological Joint Damper Design and Simulation
2.3. MR Joint Damper Dynamic Model
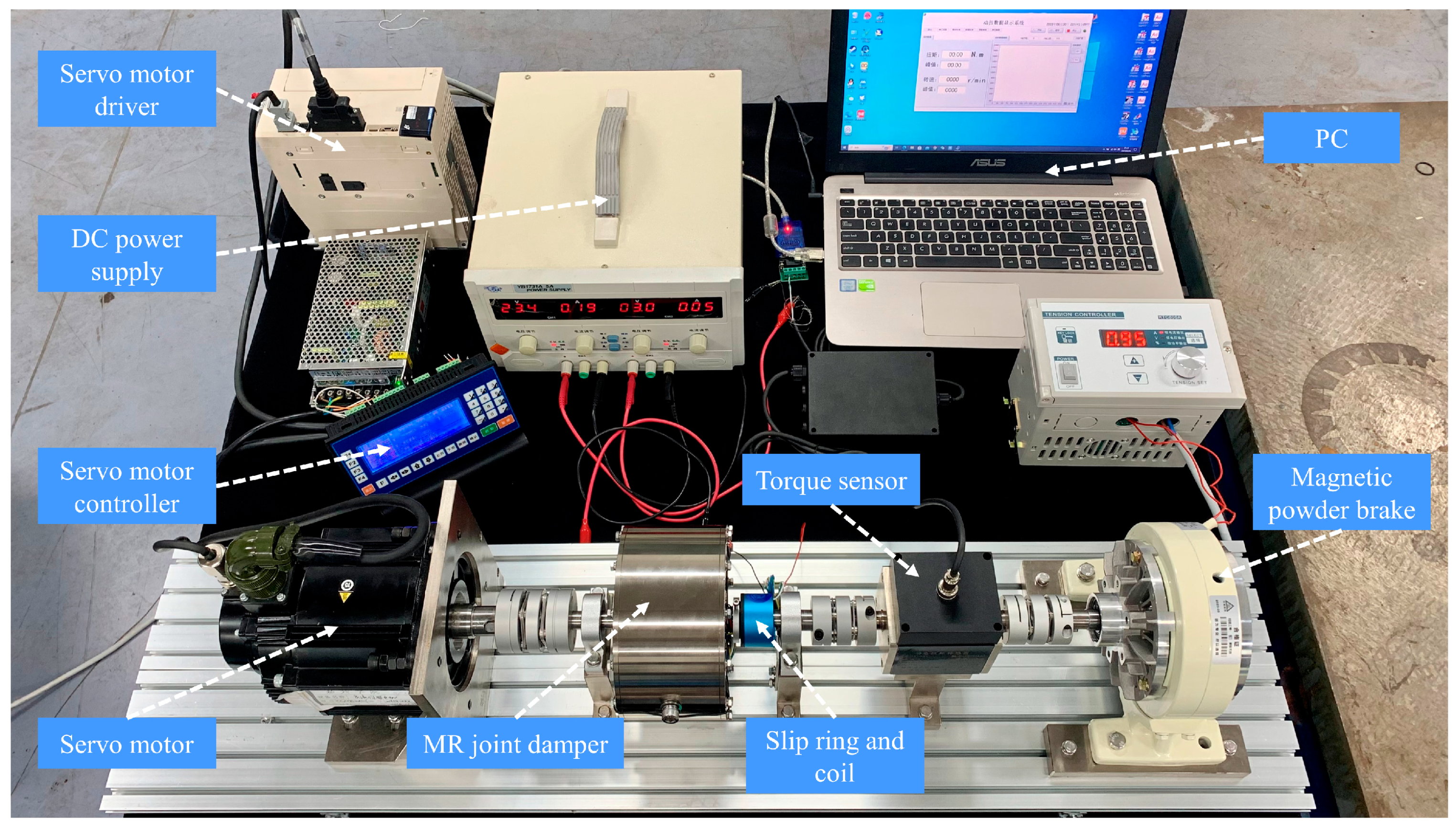
3. Robot System Implementation
4. Experiment Results and Discussion
4.1. Training Controller
4.2. Training Performance Testing
5. Conclusions
- (1)
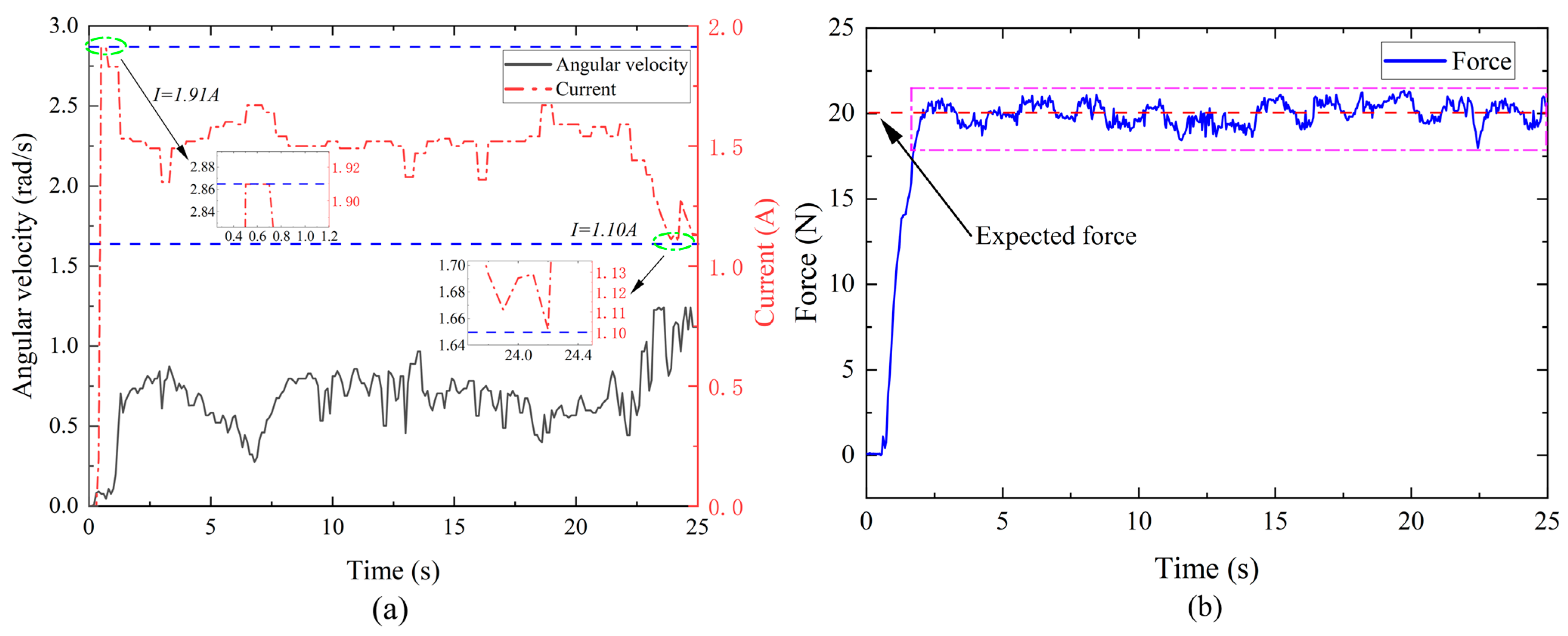
- The rehabilitation-compliant joint based on MR fluid can dynamically adjust the excitation current according to the changes in the motion state of the human upper limb. The expected torque is set to 20 N, and the average value of the output expected torque is 20.02 N, and the standard deviation is 0.635 N during the random motion of the upper limb velocity. The output torque has good stability.
- (2)
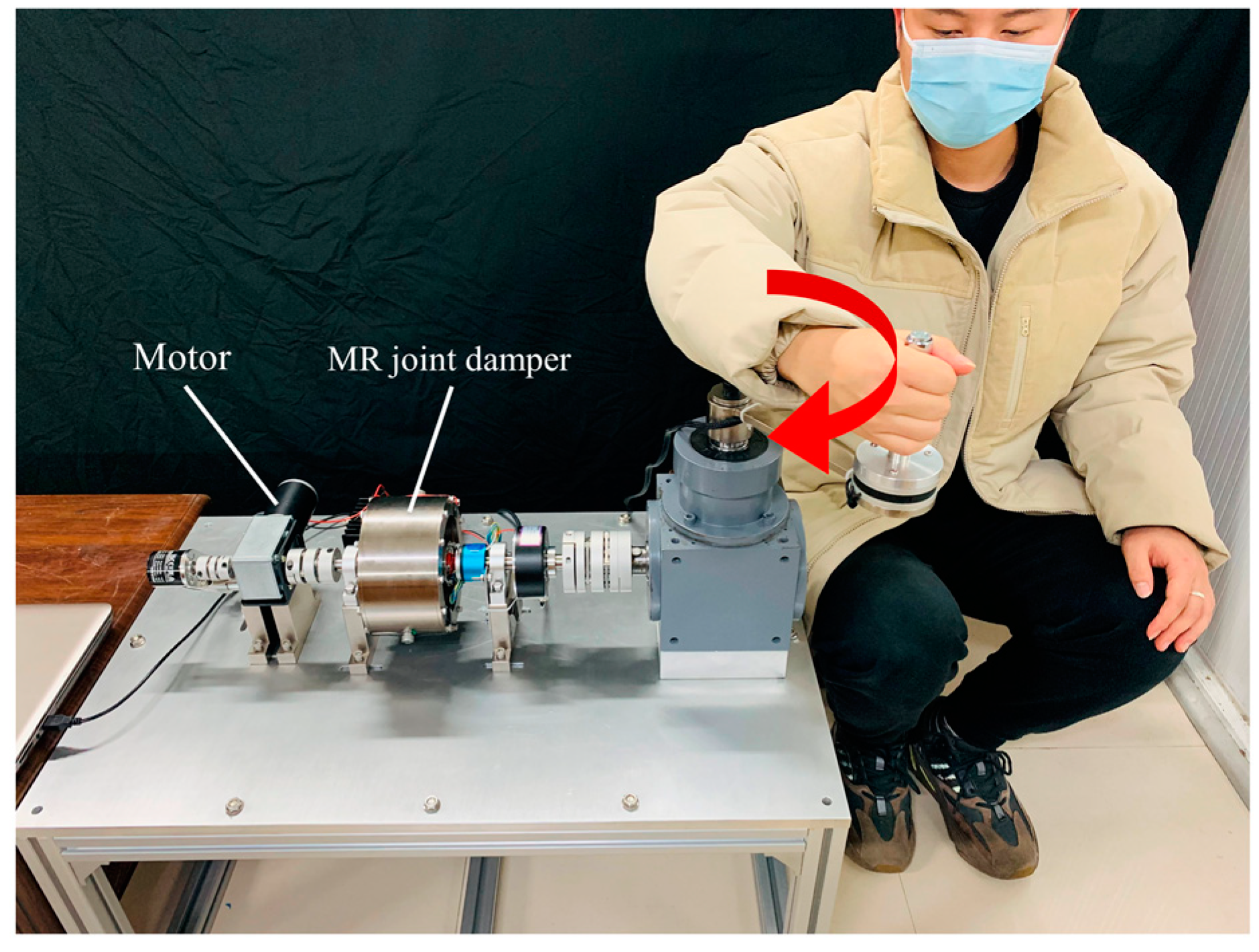
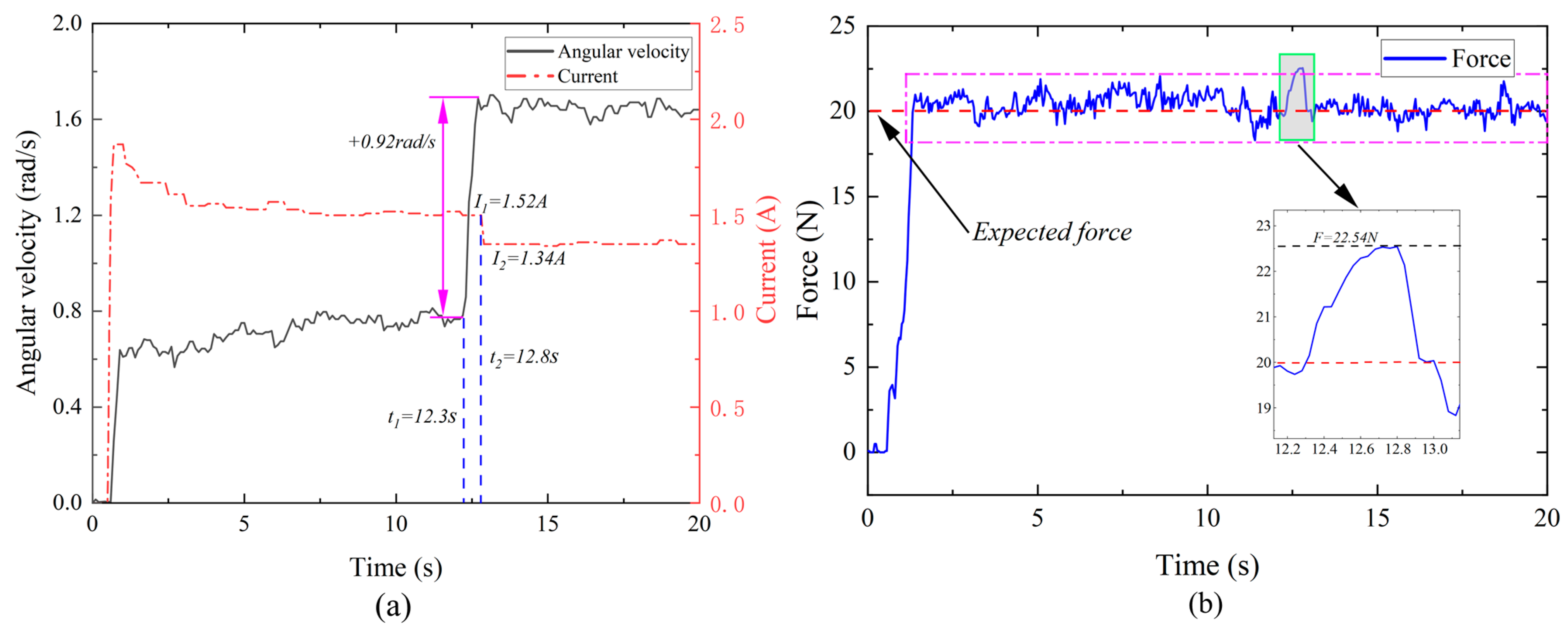
- The application of MR devices in rehabilitation training improves flexibility and safety compared with traditional motor drives. It overcomes the shortcomings of the traditional rehabilitation device, which is easy to have impact and unstable human–computer interaction force causing secondary injury. The motor speed changes during normal operation, and the controller detects the change in speed for a short period of time (0.5 s) and adjusts the excitation current (from 1.52 A to 1.34 A). When the motor speed changes, the end output torque increases by 12.5% and quickly recovers to the desired torque. In the process of safety test, the average value of the output expected torque is 20.38 N and the standard deviation is 0.645 N, which can still maintain the stability of the output torque.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
References
- Germanotta, M.; Cruciani, A.; Galli, C.; Cattaneo, D.; Spedicato, A.; Aprile, I. Time course of the upper limb motor recovery in subacute stroke patients undergoing conventional or robotic rehabilitation. J. Biol. Regul. Homeost. Agents 2020, 34, 201–208. [Google Scholar]
- Irisawa, H.; Mizushima, T. Correlation of Body Composition and Nutritional Status with Functional Recovery in Stroke Rehabilitation Patients. Nutrients 2020, 12, 1923. [Google Scholar] [CrossRef]
- Huo, W.; Mohammed, S.; Moreno, J.C.; Amirat, Y. Lower Limb Wearable Robots for Assistance and Rehabilitation: A State of the Art. IEEE Syst. J. 2016, 10, 1068–1081. [Google Scholar] [CrossRef]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 3. [Google Scholar] [CrossRef]
- Leonardis, D.; Barsotti, M.; Loconsole, C.; Solazzi, M.; Troncossi, M.; Mazzotti, C.; Castelli, V.P.; Procopio, C.; Lamola, G.; Chisari, C.; et al. An EMG-Controlled Robotic Hand Exoskeleton for Bilateral Rehabilitation. IEEE Trans. Haptics 2015, 8, 140–151. [Google Scholar] [CrossRef] [PubMed]
- Uchida, M.; Morita, Y.; Magasaki, M.; Ukai, H.; Matsui, N. Development of rehabilitation training support system of upper limb motor function for personalized rehabilitation. Int. J. Appl. Electromagn. Mech. 2011, 36, 109–119. [Google Scholar] [CrossRef]
- Sheng, B.; Zhang, Y.X.; Meng, W.; Deng, C.; Xie, S. Bilateral robots for upper-limb stroke rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2016, 38, 587–606. [Google Scholar] [CrossRef]
- Yang, Q.; Cao, D.; Zhao, J. Analysis on State of the Art of Upper Limb Rehabilitation Robots. Robot 2013, 35, 630–640. [Google Scholar] [CrossRef]
- Perry, J.C.; Rosen, J.; Bums, S. Upper-limb powered exoskeleton design. IEEE Asme Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Vitiello, N.; Lenzi, T.; Roccella, S.; De Rossi, S.M.; Cattin, E.; Giovacchini, F.; Vecchi, F.; Carrozza, M.C. NEUROExos: A Powered Elbow Exoskeleton for Physical Rehabilitation. IEEE Trans. Robot. 2013, 29, 220–235. [Google Scholar] [CrossRef]
- Klein, J.; Spencer, S.J.; Allington, J.; Minakata, K.; Wolbrecht, E.T.; Smith, R.; Bobrow, J.E.; Reinkensmeyer, A.D. Biomimetic Orthosis for the Neurorehabilitation of the Elbow and Shoulder (BONES). In Proceedings of the 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008; pp. 535–541. [Google Scholar]
- Klein, J.; Spencer, S.; Allington, J.; Bobrow, J.E.; Reinkensmeyer, D.J. Optimization of a Parallel Shoulder Mechanism to Achieve a High-Force, Low-Mass, Robotic-Arm Exoskeleton. IEEE Trans. Robot. 2010, 26, 710–715. [Google Scholar] [CrossRef]
- Zhang, Y.B.; Wang, Z.X.; Ji, L.H.; Bi, S. The clinical application of the upper extremity compound movements rehabilitation training robot. In Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005; pp. 91–94. [Google Scholar]
- Yang, Y.; Wang, L.; Tong, H.; Zhang, L. Arm rehabilitation robot impedance control and experimentation. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; pp. 914–918. [Google Scholar]
- Christie, M.D.; Sun, S.; Deng, L.; Du, H.; Zhang, S.; Li, W. Shock Absorption for Legged Locomotion through Magnetorheological Leg-Stiffness Control. Machines 2023, 11, 236. [Google Scholar] [CrossRef]
- Lu, Y.; Cao, Y.; Chen, Y.; Li, H.; Li, W.; Du, H.; Zhang, S.; Sun, S. Investigation of a wearable piezoelectric-IMU multi-modal sensing system for real-time muscle force estimation. Smart Mater. Struct. 2023, 32, 065013. [Google Scholar] [CrossRef]
- Ma, H.; Chen, B.; Qin, L.; Liao, W.H. Design and testing of a regenerative magnetorheological actuator for assistive knee braces. Smart Mater. Struct. 2017, 26, 035013. [Google Scholar] [CrossRef]
- Huang, L.J.; Hu, H.S.; Ouyang, Q. Design and Feasibility Study of MRG-Based Variable Stiffness Soft Robot. Micromachines 2022, 13, 2036. [Google Scholar] [CrossRef]
- Liu, G.S.; Hu, H.S.; Ouyang, Q.; Zhang, F. Multi-Objective Optimization Design and Performance Comparison of Magnetorheological Torsional Vibration Absorbers of Different Configurations. Materials 2023, 16, 3170. [Google Scholar] [CrossRef] [PubMed]
- Ouyang, Q.; Hu, H.S.; Qian, C.; Zhang, G.; Wang, J.; Zheng, J. Investigation of the Influence of Magnetic Field Distribution on the Magnetorheological Absorber With Individually Controllable Coils. IEEE Trans. Magn. 2019, 55, 4600613. [Google Scholar] [CrossRef]
- Andrade, R.M.; Bento, A.; Vimieiro, C.B.S.; Pinotti, E.M. Optimal design and torque control of an active magnetorheological prosthetic knee. Smart Mater. Struct. 2018, 27, 105031. [Google Scholar] [CrossRef]
- Deng, L.; Sun, S.S.; Christie, M.; Ning, D.; Jin, S.; Du, H.; Zhang, S.; Li, W. Investigation of a seat suspension installed with compact variable stiffness and damping rotary magnetorheological dampers. Mech. Syst. Signal Process. 2022, 171, 108802. [Google Scholar] [CrossRef]
- de Andrade, R.M.; Ulhoa, P.H.F.; Dias, E.A.F.; Filho, A.B.; Vimieiro, C.B. Design and testing a highly backdrivable and kinematic compatible magnetorheological knee exoskeleton. J. Intell. Mater. Syst. Struct. 2023, 34, 653–663. [Google Scholar] [CrossRef]
- Liu, G.Y.; Gao, F.; Wang, D.H.; Liao, W.H. Medical applications of magnetorheological fluid: A systematic review. Smart Mater. Struct. 2022, 31, 043002. [Google Scholar] [CrossRef]
- Wang, D.M.; Wang, Y.K.; Zi, B.; Cao, Z.; Ding, H. Development of an active and passive finger rehabilitation robot using pneumatic muscle and magnetorheological damper. Mech. Mach. Theory 2020, 147, 103762. [Google Scholar] [CrossRef]
- Xu, J.J.; Li, Y.F.; Xu, L.S.; Peng, C.; Chen, S.; Liu, J.; Xu, C.; Cheng, G.; Xu, H.; Liu, Y.; et al. A Multi-Mode Rehabilitation Robot with Magnetorheological Actuators Based on Human Motion Intention Estimation. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2216–2228. [Google Scholar] [CrossRef]
- Cheng, G.X.; Xu, L.S.; Xu, J.J.; Liu, J.; Shi, J.; Chen, S.; Liu, L.; Liang, X.; Liu, Y. Robotic mirror therapy system for lower limb rehabilitation. Ind. Robot. Int. J. Robot. Res. Appl. 2021, 48, 221–232. [Google Scholar] [CrossRef]
- Khazoom, C.; Veronneau, C.; Bigue, J.P.L.; Grenier, J.; Girard, A.; Plante, J.S. Design and Control of a Multifunctional Ankle Exoskeleton Powered by Magnetorheological Actuators to Assist Walking, Jumping, and Landing. IEEE Robot. Autom. Lett. 2019, 4, 3083–3090. [Google Scholar] [CrossRef]
- Avraam, M.; Horodinca, M.; Romanescu, I.; Preumont, A. Computer Controlled Rotational MR-brake for Wrist Rehabilitation Device. J. Intell. Mater. Syst. Struct. 2010, 21, 1543–1557. [Google Scholar] [CrossRef]
- Kikuchi, T.; Otsuki, K.; Furusho, J.; Abe, H.; Noma, J.; Naito, M.; Lauzier, N. Development of a Compact Magnetorheological Fluid Clutch for Human-Friendly Actuator. Adv. Robot. 2010, 24, 1489–1502. [Google Scholar] [CrossRef]
- Abdelhameed, E.H.; Sato, N.; Morita, Y. Design of Variable Resistance Training System Using Rotary Magnetorheological Brake Ataxic Patients’ Upper Limb Rehabilitation. In Proceedings of the 3rd IEEE International Conference on Control, Automation and Robotics, Nagoya, Japan, 24–26 April 2017; pp. 293–298. [Google Scholar]
- Bosga, J.; Meulenbroek, R.G.J.; Swinnen, S.P. Stability of inter-joint coordination during circle drawing: Effects of shoulder-joint articular properties. Hum. Mov. Sci. 2003, 22, 297–320. [Google Scholar] [CrossRef]
- Zhang, S.; Zuo, G.; Shi, C.; Xu, J.; Liu, X.; Gao, J.; Li, G. The sEMG characteristics of human upper limb during circle drawing on EULRR system. In Proceedings of the IEEE International Conference on Cybernetics and Intelligent Systems (CIS) IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 423–427. [Google Scholar]
- Gates, D.H.; Walters, L.S.; Cowley, J.; Wilken, J.M.; Resnik, L. Range of Motion Requirements for Upper-Limb Activities of Daily Living. Am. J. Occup. Ther. 2016, 70, 7001350010p1–7001350010p10. [Google Scholar] [CrossRef]
- Khanicheh, A.; Muto, A.; Triantafyllou, C.; Weinberg, B.; Astrakas, L.; Tzika, A.; Mavroidis, C. fMRI-compatible rehabilitation hand device. J. Neuroeng. Rehabil. 2006, 3, 24. [Google Scholar] [CrossRef]
- Ren, Z.; Ye, S.; Nie, Q.; Feng, J.; Liu, K.; Li, Q.; Wen, J. Application of digitization and visualization-based muscle strength measurement in ischemic stroke patients with motor dysfunction. Sci. Rep. 2023, 13, 17507. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Ouyang, Q.; Hu, H.S.; Ye, X.; Lin, L. Semi-active control of crankshaft skyhook based on magnetorheological torsional damper. Front. Mater. 2022, 9, 933076. [Google Scholar] [CrossRef]
- Zhu, H.; Rui, X.; Yang, F.; Zhu, W.; Wei, M. An efficient parameters identification method of normalized Bouc-Wen model for MR damper. J. Sound Vib. 2019, 448, 146–158. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Degrees of Freedom | Range | Length (mm) |
|---|---|---|---|
| Shoulder joint | horizontal abduction–adduction | −65°~105° (θ1) | 330 (L1) |
| Elbow joint | flexion–extension | 0°~141° (θ2) | 255 (L2) |
| Wrist joint | flexion–extension | −40°~38° (θ3) | 50 (L3) |
| Rank | Name | Standard | Compared to Normal |
|---|---|---|---|
| 0 | None | No muscle contraction | 0% |
| 1 | Weak | There is slight contraction, but no joint movement | 10% |
| 2 | Poor | Ability to do full range of motion of joints in a reduced weight state | 25% |
| 3 | Fair | Full range of joint motion against gravity, but not resistance | 50% |
| 4 | Fine | Resist gravity and certain resistance, and do full range of joint movement | 75% |
| 5 | Normal | Resist gravity and sufficient resistance, do full range of joint movement | 100% |
| Parameter | Value | Material |
|---|---|---|
| MR joint damper diameter | 151 mm | / |
| MR joint damper width | 82 mm | / |
| MR joint damper mass | 6.9 kg | / |
| Channel gap | 2 mm | / |
| Flanged shaft length | 90 mm | 304 stainless steels |
| Axis length | 122.70 mm | 304 stainless steels |
| Upper shell width | 37 mm | Q235 |
| Lower shell width | 37 mm | |
| Side shell diameter | 151 mm | Q235 |
| Side shell width | 74 mm | |
| Rotor diameter | 130 mm | Q235 |
| Rotor width | 34 mm | |
| Magnetic barrier ring diameter | 130 × 137 mm | 6061 aluminum alloy |
| Magnetic barrier ring width | 18 mm | |
| Wire diameter | 0.59 mm | Copper |
| Coil turns | 100 × 2 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 0.04536 | −2.486 | 3.686 | |||
| −0.02071 | 18.6 | −1.214 | |||
| −0.8984 | −42.14 | 9.759 | |||
| 0.03166 | 28.34 | −24.39 | |||
| 0.002454 | −0.7454 | 18.87 | |||
| −0.01988 | 5.258 | −0.7968 | |||
| 0.0447 | −42.56 | 0.03472 | |||
| −0.01778 | 106.9 | ||||
| −0.0058 | −82.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Hu, H.; Zhao, W.; Yang, J.; Ouyang, Q. Design and Control of Upper Limb Rehabilitation Training Robot Based on a Magnetorheological Joint Damper. Micromachines 2024, 15, 301. https://doi.org/10.3390/mi15030301
Zhu J, Hu H, Zhao W, Yang J, Ouyang Q. Design and Control of Upper Limb Rehabilitation Training Robot Based on a Magnetorheological Joint Damper. Micromachines. 2024; 15(3):301. https://doi.org/10.3390/mi15030301
Chicago/Turabian StyleZhu, Jintao, Hongsheng Hu, Wei Zhao, Jiabin Yang, and Qing Ouyang. 2024. "Design and Control of Upper Limb Rehabilitation Training Robot Based on a Magnetorheological Joint Damper" Micromachines 15, no. 3: 301. https://doi.org/10.3390/mi15030301
APA StyleZhu, J., Hu, H., Zhao, W., Yang, J., & Ouyang, Q. (2024). Design and Control of Upper Limb Rehabilitation Training Robot Based on a Magnetorheological Joint Damper. Micromachines, 15(3), 301. https://doi.org/10.3390/mi15030301