
A Compact Memristor Model Based on Physics-Informed Neural Networks


Abstract
1. Introduction
2. Physics Based Memristor Models
2.1. Generalized Mean Metastable Switch (GMMS) Memristor Model
2.2. Memristor Model of Messaris et al.
3. Physics-Informed Neural Network Model
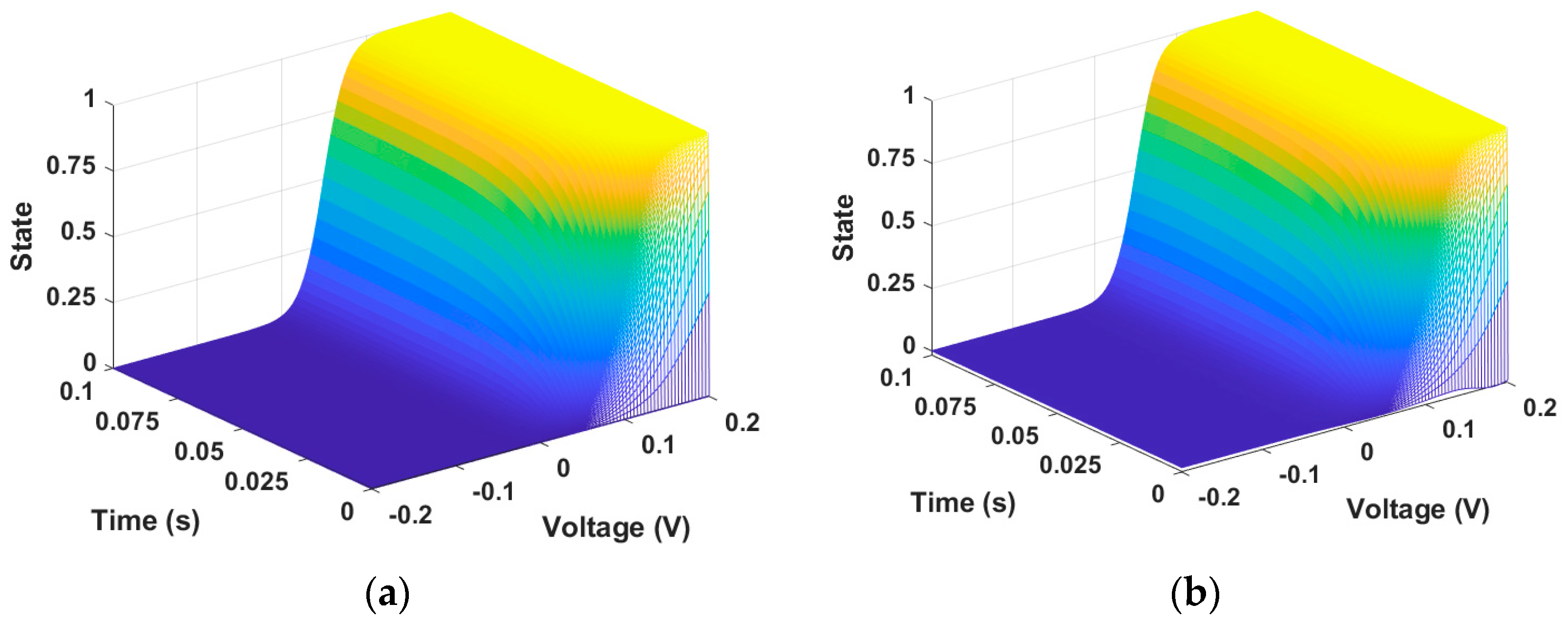
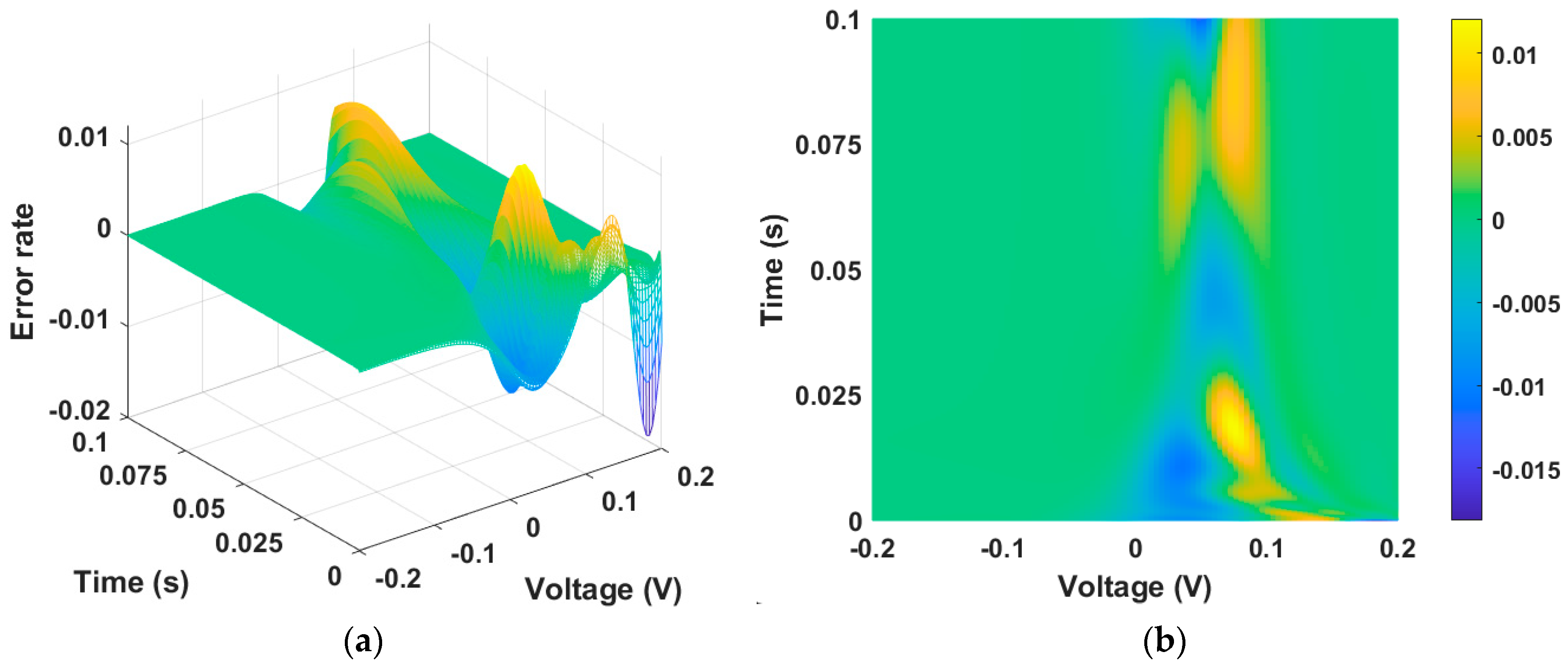
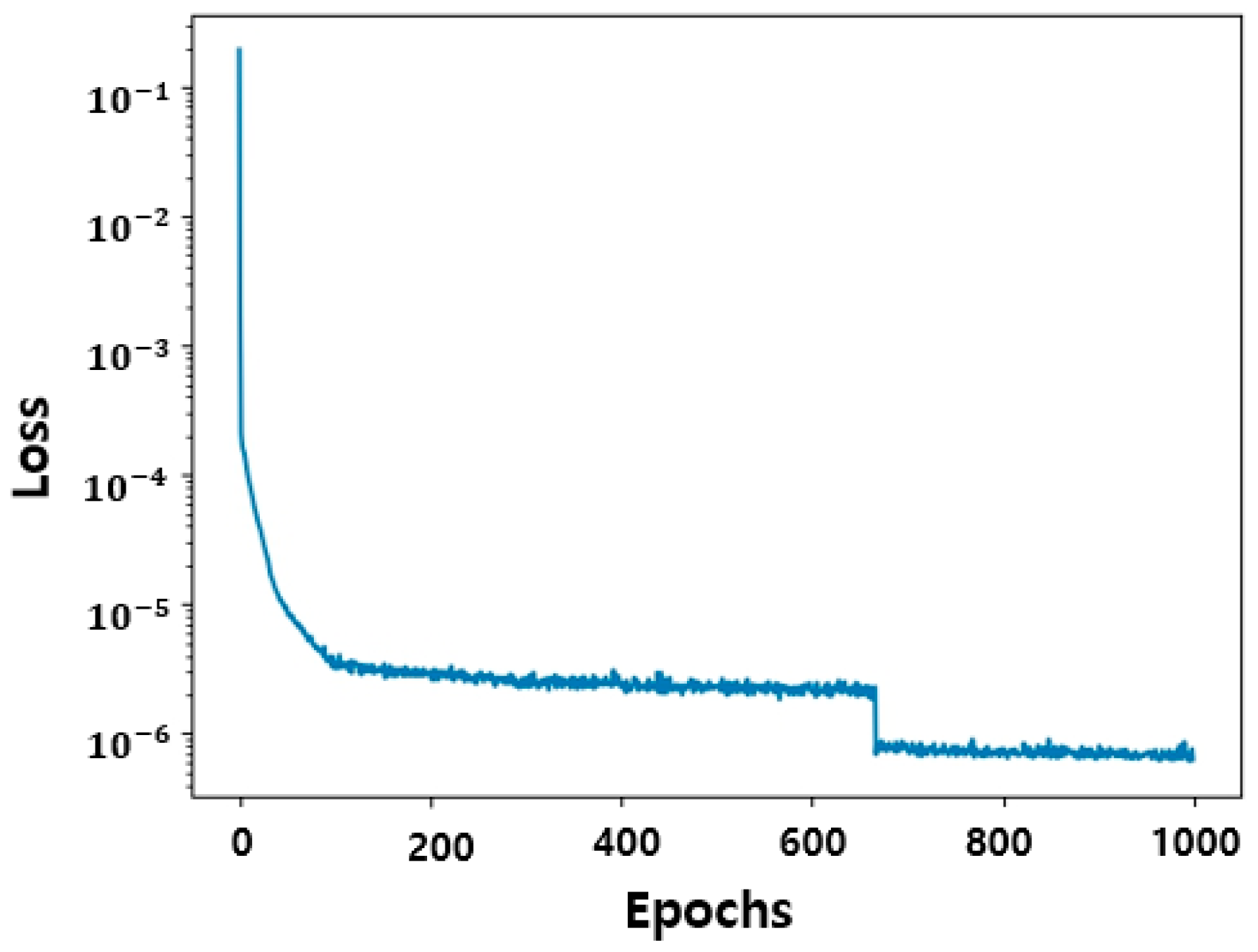
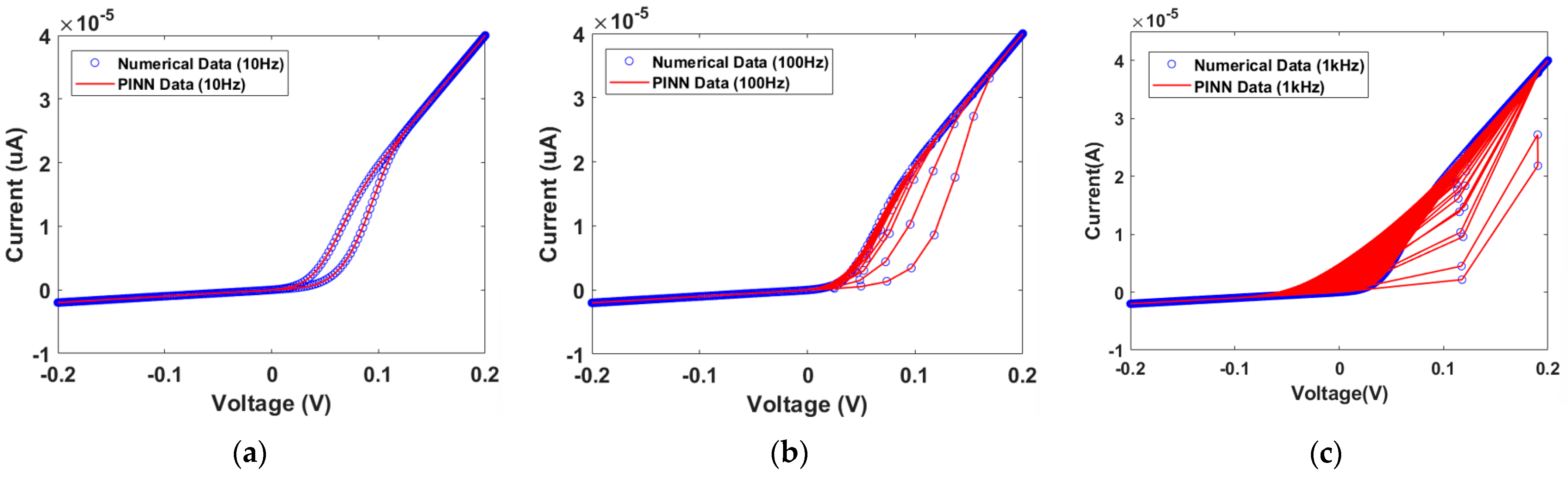
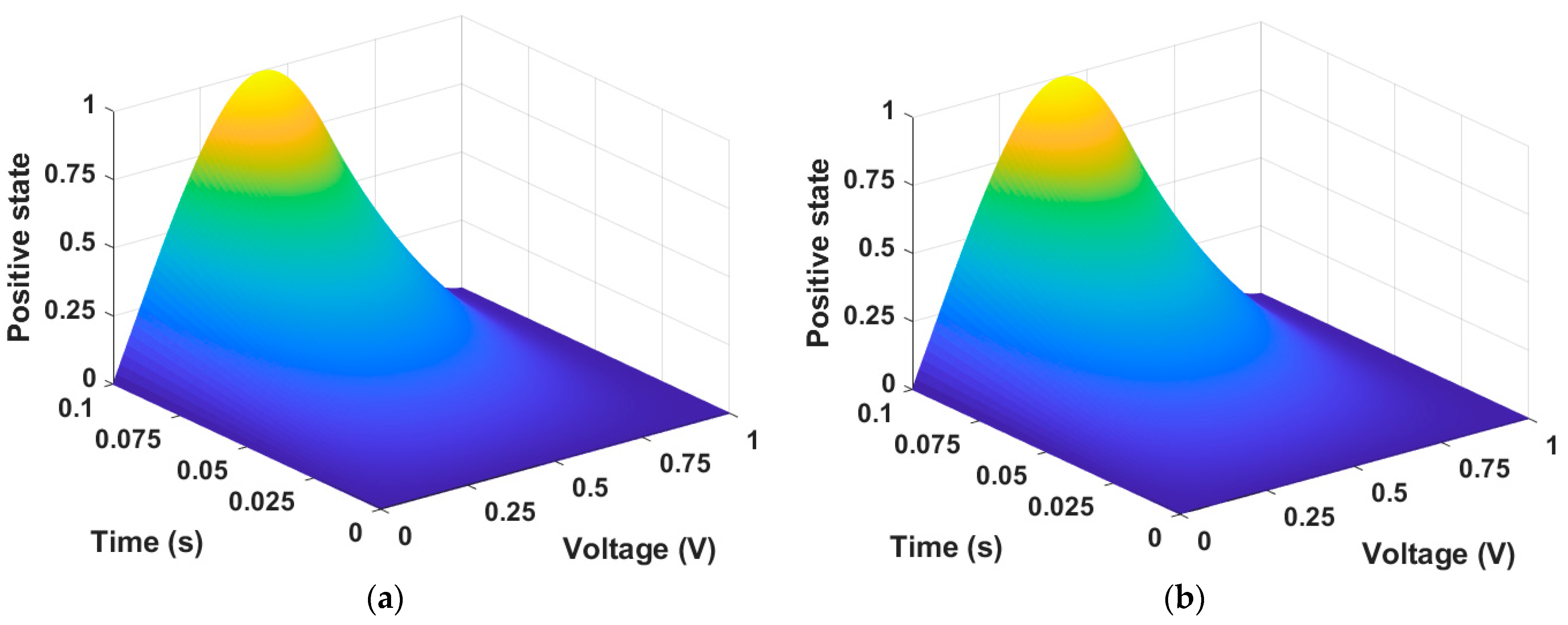
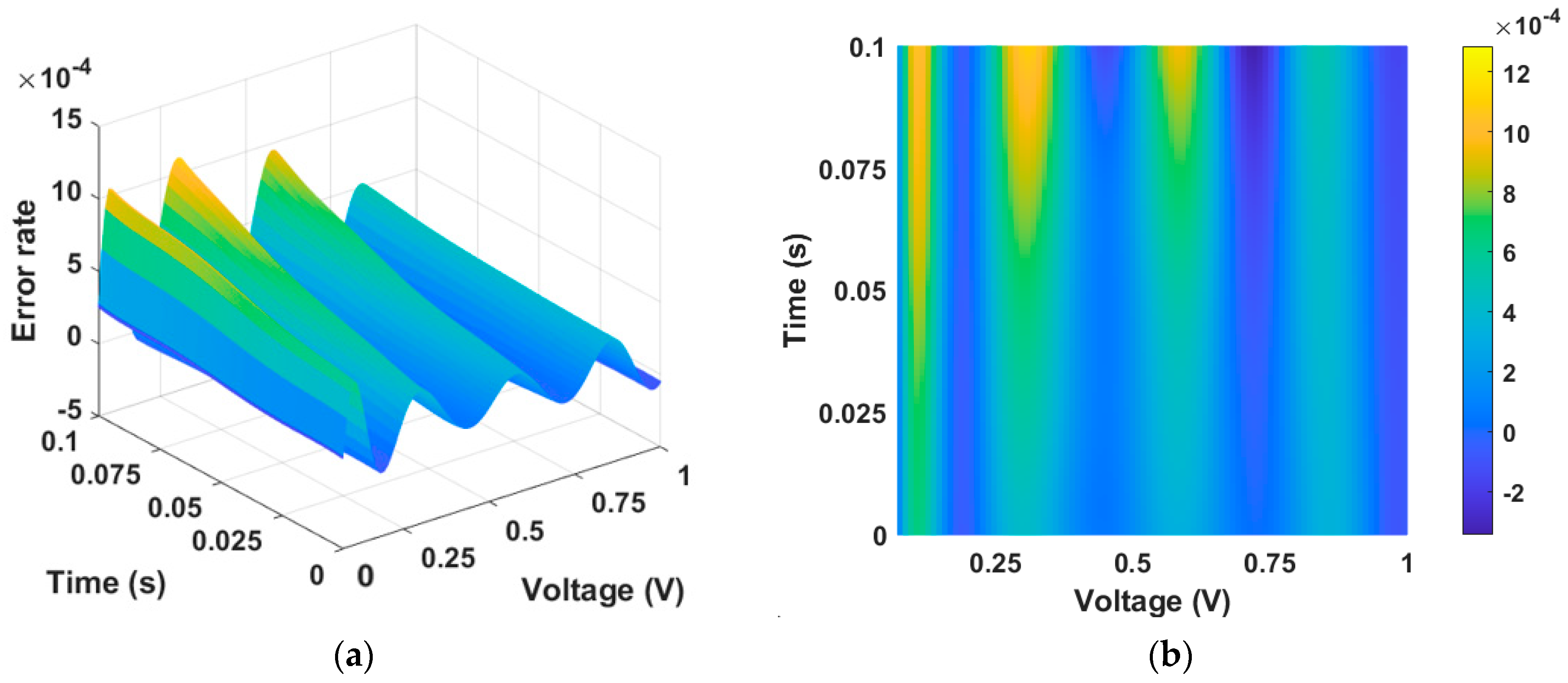
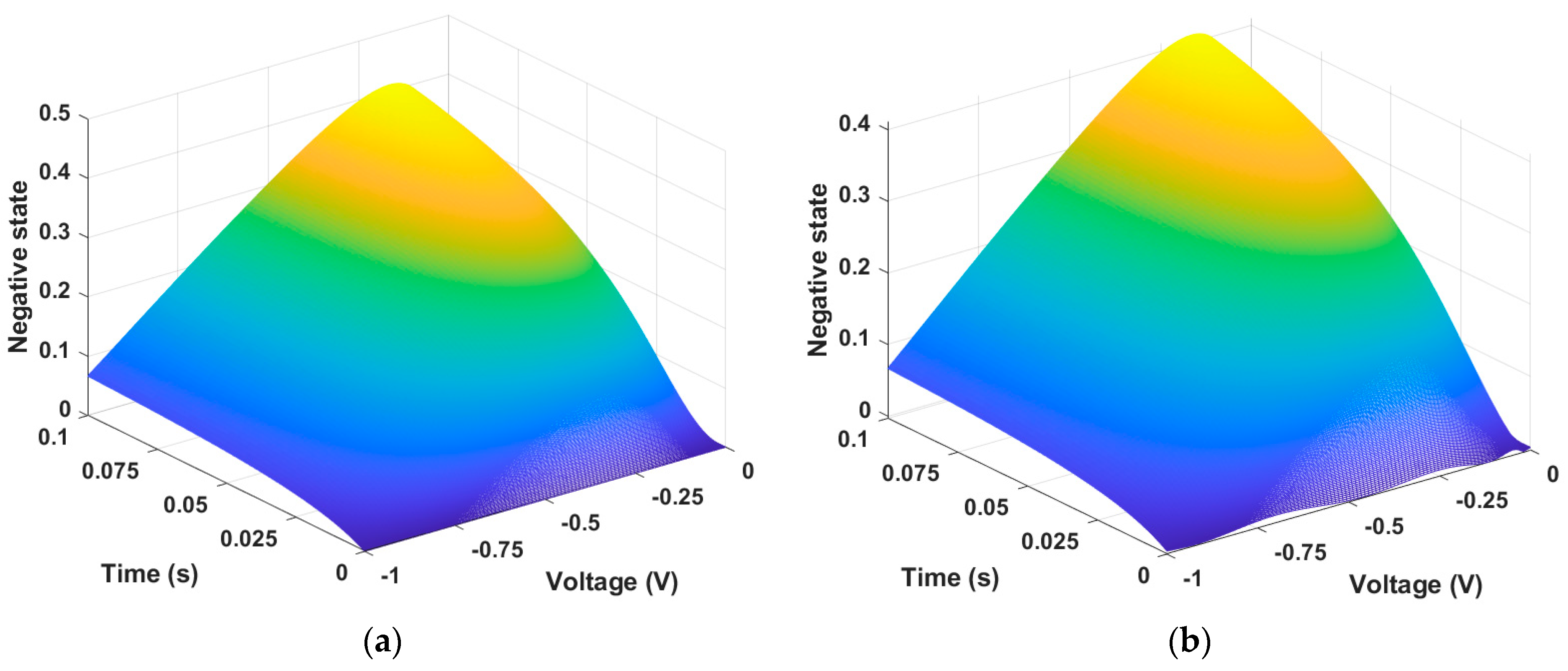
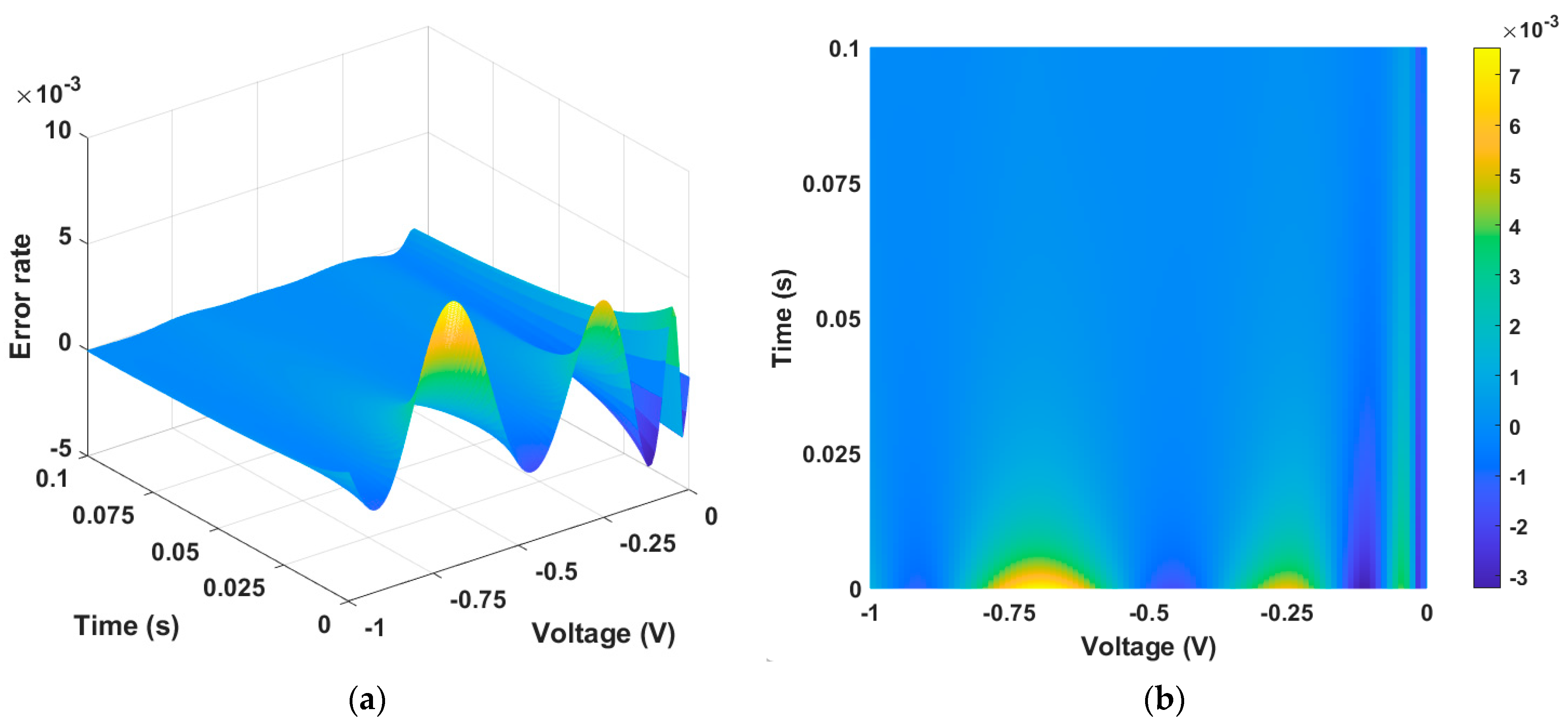
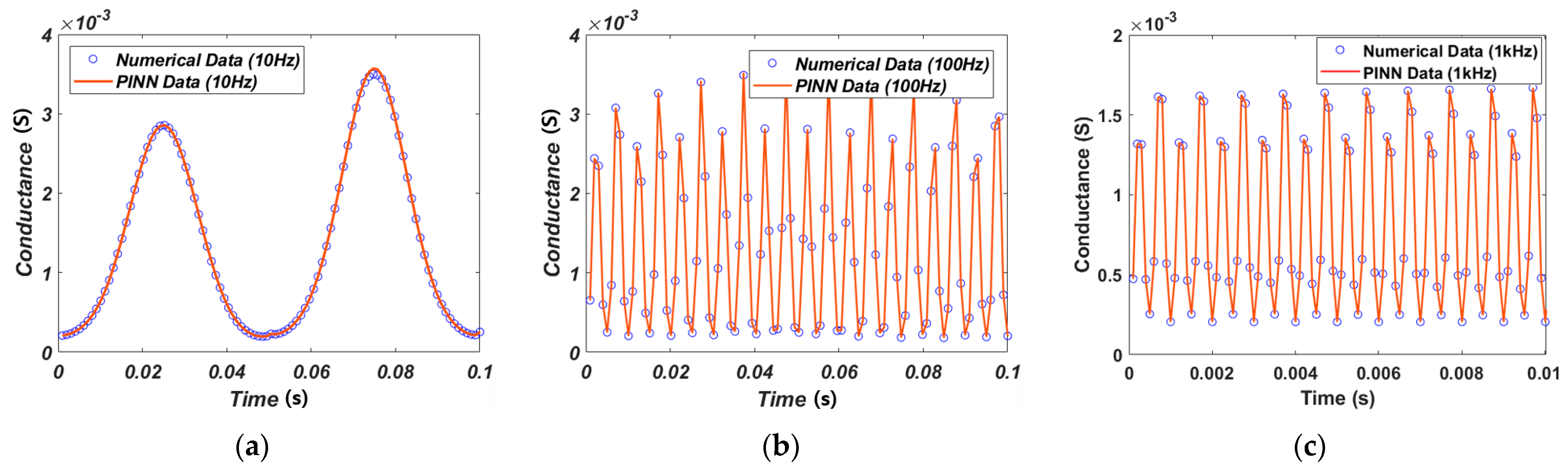
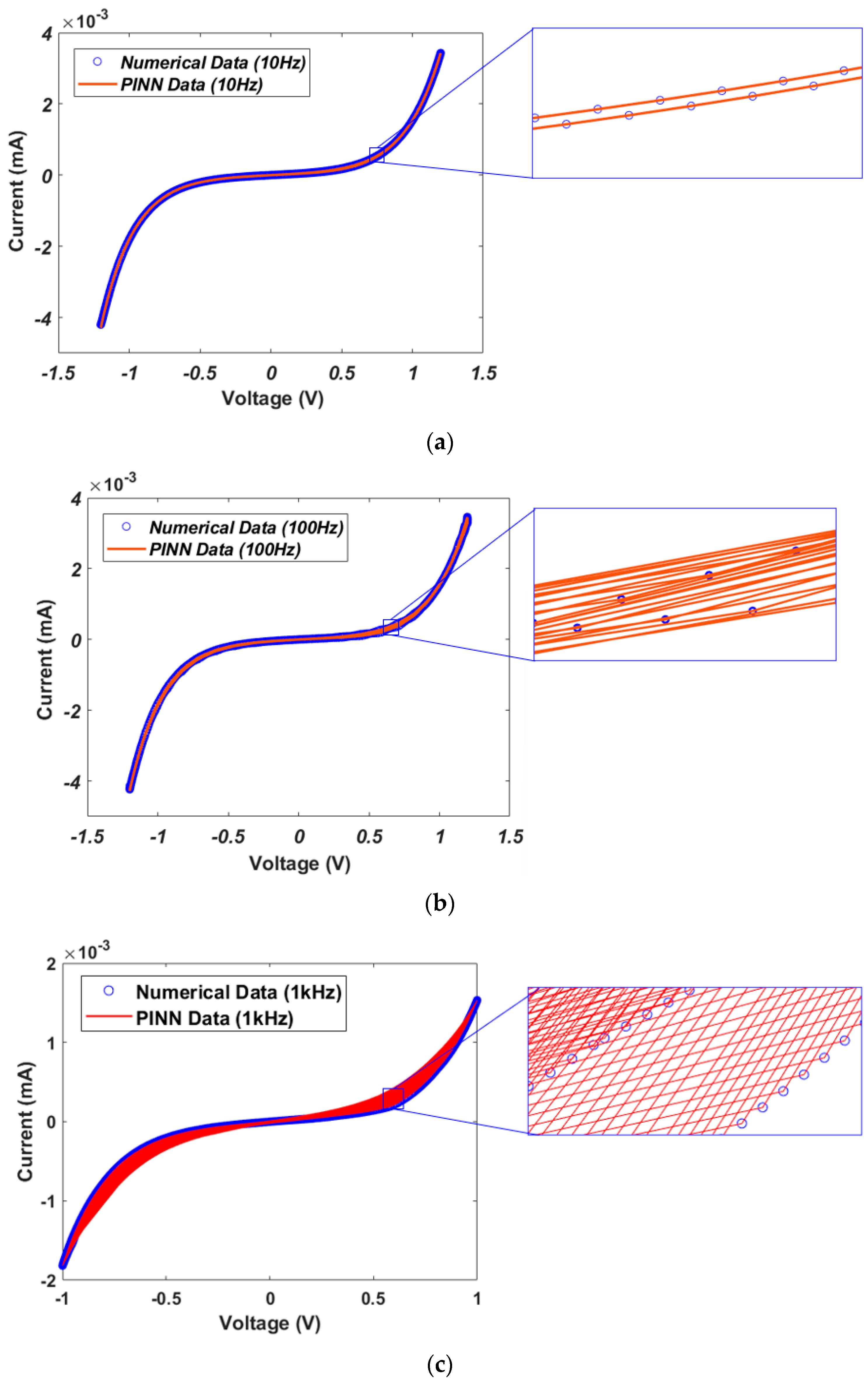
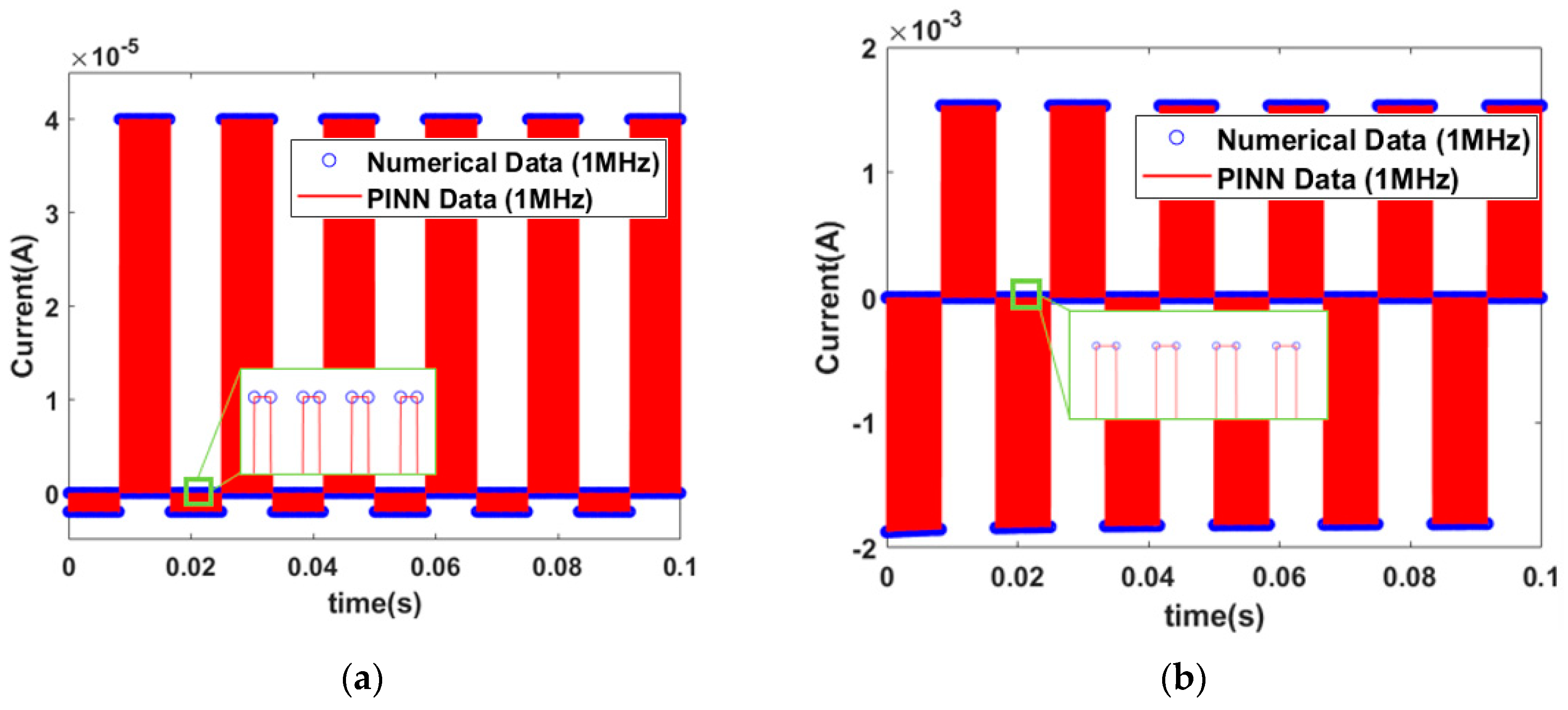
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chua, L. Memeristor-the missing circuit element. IEEE Trans. Electron Devices 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Tang, Z.; Sun, B.; Zhou, G.; Zhou, Y.; Cao, Z.; Duan, X.; Yan, W.; Chen, X.; Shao, J. Research progress of artificial neural systems based on memristors. Mater. Today Nano 2023, 25, 100439. [Google Scholar] [CrossRef]
- Deng, Q.; Wang, C.; Sun, J.; Sun, Y.; Jiang, J.; Lin, H.; Deng, Z. Nonvolatile CMOS Memristor, Reconfigurable Array, and Its Application in Power Load Forecasting. IEEE Trans. Ind. Inform. 2023, 1–12. [Google Scholar] [CrossRef]
- Yu, F.; Kong, X.; Yao, W.; Zhang, J.; Cai, S.; Lin, H.; Jin, J. Dynamics analysis, synchronization and FPGA implementation of multiscroll Hopfield neural networks with non-polynomial memristor. Chaos Soliton Fractals 2024, 179, 114440. [Google Scholar] [CrossRef]
- Ma, M.; Xiong, K.; Li, Z.; He, S. Dynamical behavior of memristor-coupled heterogeneous discrete neural networks with synaptic crosstalk. Chin. Phys. B 2024, 33, 028706. [Google Scholar] [CrossRef]
- Sarwar, S.S.; Saqueb, S.A.N.; Quaiyum, F.; Rashid, A.B.M.H.-U. Memristor-based non-volatile random access memory: Hybrid architecture for low power compact memory design. IEEE Access 2013, 1, 29–34. [Google Scholar] [CrossRef]
- Mohammad, B.; Jaoude, M.A.; Kumar, V.; Al Homouz, D.M.; Nahla, H.A.; Al-Qutayri, M.; Christoforou, N. State of the art of metal oxide memristor devices. Nanotechnol. Rev. 2016, 5, 311–329. [Google Scholar] [CrossRef]
- Zhang, Y.; Mao, G.Q.; Zhao, X.; Li, Y.; Zhang, M.; Wu, Z.; Wu, W.; Sun, H.; Guo, Y.; Wang, L.; et al. Evolution of the conductive filament system in HfO2-based memristors observed by direct atomic-scale imaging. Nat. Commun. 2021, 12, 7232. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wang, Z.; Midya, R.; Xia, Q.; Yang, J.J. Review of memristor devices in neuromorphic computing: Materials sciences and device challenges. J. Phys. D Appl. Phys. 2018, 51, 503002. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, W. Nanoscale Resistive Switching Devices: Mechanisms and Modeling. Nanoscale 2024, 5, 10076–10092. [Google Scholar] [CrossRef]
- Ikeda, S.; Miura, K.; Yamamoto, H.; Mizunuma, K.; Gan, H.D.; Endo, M.; Kanai, S.; Hayakawa, J.; Matsukura, F.; Ohno, H. A perpendicular-anisotropy CoFeB–MgO magnetic tunnel junction. Nat. Mater. 2010, 9, 721–724. [Google Scholar] [CrossRef]
- Williams, R.S.; Pickett, M.D.; Strachan, J.P. Physics-based memristor models. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS), Beijing, China, 19–23 May 2013; pp. 217–220. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Mladenov, V.; Kirilo, S. A memristor model with a modified window function and activation thresholds. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Mladenov, V. Analysis and simulations of hybrid memory scheme based on memristors. Electronics 2018, 7, 289. [Google Scholar] [CrossRef]
- Mladenov, V.; Kirilo, S. Analysis of the mutual inductive and capacitive connections and tolerances of memristors parameters of a memristor memory matrix. In Proceedings of the 2013 European Conference on Circuit Theory and Design (ECCTD), Dresen, Germany, 8–12 September 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Mladenov, V.; Kirilo, S. A modified tantalum oxide memristor model for neural networks with memristor-based synapses. In Proceedings of the 2020 9th International Conference on Modern Circuits and Systems Technologies (MOCAST), Bremen, Germany, 7–9 September 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Joglekar, Y.N.; Wolf, S.J. The elusive memristor: Properties of basic electrical circuits. Eur. J. Phys. 2009, 30, 661–675. [Google Scholar] [CrossRef]
- Abdalla, H.; Pickett, M.D. SPICE Modeling of Memristors. In Proceedings of the 2011 IEEE International Symposium of Circuits and Systems (ISCAS), Rio de Janeiro, Brazil, 15–18 May 2011; pp. 1832–1835. [Google Scholar] [CrossRef]
- Strachan, J.P.; Torrezan, A.C.; Miao, F.; Pickett, M.D.; Yang, J.J.; Yi, W.; Medeiros-Ribeiro, G.; Williams, R.S. State dynamics and modeling of tantalum oxide memristors. IEEE Trans. Electron Devices 2013, 60, 2194–2202. [Google Scholar] [CrossRef]
- Ostrovskii, V.; Fedoseev, P.; Bobrova, Y.; Butusov, D. Structural and parametric identification of knowm memristors. Nanomaterials 2021, 12, 63. [Google Scholar] [CrossRef]
- Minati, L.; Gambuzza, L.V.; Thio, W.J.; Sprott, J.C.; Frasca, M. A chaotic circuit based on a physical memristor. Chaos Solitons Fractals 2020, 138, 109990. [Google Scholar] [CrossRef]
- Maheshwari, S.; Stathopoulos, S.; Wang, J.; Serb, A.; Pan, Y.; Mifsud, A.; Leene, L.B.; Shen, J.; Papavassiliou, C.; Constandinou, T.G.; et al. Design flow for hybrid cmos/memristor systems—Part i: Modeling and verification steps. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 4862–4875. [Google Scholar] [CrossRef]
- Messaris, I.; Serb, A.; Stathopoulos, S.; Khiat, A.; Nikolaidis, S.; Prodromakis, T. A data-driven verilog-a reram model. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2018, 37, 3151–3162. [Google Scholar] [CrossRef]
- Messaris, I.; Nikolaidis, S.; Serb, A.; Stathopoulos, S.; Gupta, I.; Khiat, A.; Prodromakis, T. A TiO2 ReRAM parameter extraction method. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltmore, MD, USA, 28–31 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Serb, I.M.A.; Stathopoulos, S.; Khiat, A.; Nikolaidis, S.; Prodromakis, T. A compact Verilog-A ReRAM switching model. arXiv 2017, arXiv:1703.01167. [Google Scholar]
- Lin, A.S.; Pratik, S.; Ota, J.; Rawat, T.S.; Huang, T.H.; Hsu, C.L.; Su, W.M.; Tseng, T.Y. A process-aware memory compact-device model using long-short term memory. IEEE Access 2021, 9, 3126–3139. [Google Scholar] [CrossRef]
- Sha, Y.; Lan, J.; Li, Y.; Chen, Q. A Physics-Informed Recurrent Neural Network for RRAM Modeling. Electronics 2023, 12, 2906. [Google Scholar] [CrossRef]
- Moradi, S.; Duran, B.; Azam, S.E.; Mofid, M. Novel Physics-Informed Artificial Neural Network Architectures for System and Input Identification of Structural Dynamics PDEs. Buildings 2023, 13, 650. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Kvatinsky, S.; Ramadan, M.; Friedman, E.G.; Kolodny, A. VTEAM: A general model for voltage-controlled memristors. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 786–790. [Google Scholar] [CrossRef]
- Di Marco, M.; Forti, M.; Pancioni, L.; Innocenti, G.; Tesi, A.; Corinto, F. Oscillatory circuits with a real non-volatile Stanford memristor model. IEEE Access 2022, 10, 13650–13662. [Google Scholar] [CrossRef]
- Sola, J.; Sevilla, J. Importance of input data normalization for the application of neural networks to complex industrial problems. IEEE Trans. Nucl. Sci. 1997, 44, 1464–1468. [Google Scholar] [CrossRef]
- Bhanja, S.; Das, A. Impact of data normalization on deep neural network for time series forecasting. arXiv 2018, arXiv:1812.05519. [Google Scholar]
- Narayan, S. The generalized sigmoid activation function: Competitive supervised learning. Inf. Sci. 1997, 99, 69–82. [Google Scholar] [CrossRef]
- Karlik, B.; Olgac, A.V. Performance analysis of various activation functions in generalized MLP architectures of neural networks. Proc. Int. J. Art. Intel. Exp. Syst. 2013, 1, 111–122. [Google Scholar]
- Haghihat, E.; Juanes, R. SciANN: A Keras/Tensorflow wrapper for scientific computations and physics-informed deep learning using artificial neural networks. Comput. Methods Appl. Mech. Eng. 2021, 373, 113552. [Google Scholar] [CrossRef]
- Kvatinsky, S.; Talisveyberg, K.; Fliter, D.; Friedman, E.G.; Kolodny, A.; Weiser, U.C. Verilog-A for Memristor Models; CCIT Report; Department of Electrical Engineering, Technion—Israel Institute of Technology: Haifa, Israel, 2012; p. 801. [Google Scholar]
- Ambrogio, S.; Balatti, S.; Cubeta, A.; Calderoni, A.; Ramaswamy, N.; Ielmini, D. Statistical fluctuations in HfOx resistive-switching memory: Part I-set/reset variability. IEEE Trans. Electron Devices 2014, 61, 2912–2919. [Google Scholar] [CrossRef]
- Roldán, J.B.; Miranda, E.; Maldonado, D.; Mikhaylov, A.N.; Agudov, N.V.; Dubkov, A.A.; Koryazhkina, M.N.; González, M.B.; Villena, M.A.; Poblador, S.; et al. Variability in resistive memories. Adv. Intell. Syst. 2023, 5, 2200338. [Google Scholar] [CrossRef]
- Al-Shedivat, M.; Naous, R.; Cauwenberghs, G.; Salama, K.N. Memristors empower spiking neurons with stochasticity. IEEE J. Emerg. Sel. Top. Circuit Syst. 2015, 5, 242–253. [Google Scholar] [CrossRef]
- Naous, R.; Al-Shedivat, M.; Salama, K.N. Stochasticity modeling in memristors. IEEE Trans. Nanotechnol. 2016, 15, 15–28. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.; Kim, K.; Lee, J. A Compact Memristor Model Based on Physics-Informed Neural Networks. Micromachines 2024, 15, 253. https://doi.org/10.3390/mi15020253
Lee Y, Kim K, Lee J. A Compact Memristor Model Based on Physics-Informed Neural Networks. Micromachines. 2024; 15(2):253. https://doi.org/10.3390/mi15020253
Chicago/Turabian StyleLee, Younghyun, Kyeongmin Kim, and Jonghwan Lee. 2024. "A Compact Memristor Model Based on Physics-Informed Neural Networks" Micromachines 15, no. 2: 253. https://doi.org/10.3390/mi15020253
APA StyleLee, Y., Kim, K., & Lee, J. (2024). A Compact Memristor Model Based on Physics-Informed Neural Networks. Micromachines, 15(2), 253. https://doi.org/10.3390/mi15020253