1. Introduction
Accurate theoretical models of background–inclusion media are essential in the quantitative determination of mechanical properties of poroelastic materials such as biological tissues, hydrogels, micro-fibrous scaffolds and micro-porous polymers, in which inclusions such as tumours and structural anomalies are common [
1]. These theoretical models allow us to precisely evaluate mechanical features and compare them on an
elastography image (elastogram) in imaging techniques like ultrasound
elastography [
2]. A
number of mathematical models have been developed for the mechanical behaviour
of poroelastic materials with inclusions in recent years. Shin et al. [
3]
used Eshelby’s model of
elasticity, an analytical method of estimating the elastic properties of
inclusion–matrix media, in order to determine strain and stress components
inside breast tissues with ellipsoidal lesions as inclusions. In another study,
Goswami and his co-workers [
4]
developed a theoretical platform using the Caley–Hamilton theorem
and classical elasticity to analyse the shear induced nonlinear mechanics in
phantoms with undesirable inclusions under finite deformations. A poroelastic
model was also presented by Islam and Righetti [
5]
using the conventional
poroelasticity theory for investigating the mechanics of biological tissues
containing spherical tumours. Moreover, a numerical mathematical approach was
proposed to study large-scale elastic bodies with thin inclusions based on a
scale-free elasticity theory and finite element technique [
6]. Costa and Gentile [
7]
developed a discrete doublet
model of mechanics to simulate ultrasound wave propagation within biological
tissues as the poroelastic material, excluding any potential inclusions. In a
recent study conducted by Favata et al. [
8], it has been shown that the mechanical behaviour of biological
inclusions at microscale levels is different from those at large scales. The development
of microscale premalignant inclusions leads to stiffness softening, while the
presence of large-scale inclusions is associated with a hardening behaviour,
known as the soft-cell solid tumour paradox [
9]. More recently, mathematical models of poroelasticity
[
10]
and an artificial neural
network technique [
11] have been developed to capture Poisson’s ratio in abnormalities and estimate
mechanical stiffness in inhomogeneous materials.
However, at nano and microscales, the
dimensionless mechanical characteristics of a substance are highly sensitive to
its size [
12,
13,
14,
15]. This widely reported phenomenon is known as scale (size) dependency [
16,
17] and is associated with
several underlying factors including molecular interactions [
18]
and stiffness alteration [
19]. As classical local elasticity
and poroelasticity models are formulated on the basis of scale-free theories of
continuum mechanics, they lack the ability to capture size effects and, thus,
fail to accurately estimate the mechanical response at nano and microscales.
Peddieson et al. [
20] applied a version of nonlocal elasticity, which was first introduced by Eringen [
21], to develop scale-dependent beam models suitable for describing the mechanics of nanoscale devices such as small-scale actuators with nanocantilevers as building blocks.
Following this pioneering work, several researchers across the world have
extended the application of nonlocal theories to other small-scale structures
and devices such as nanobeams [
22], nanoscale sensors [
23], nanoplates [
24,
25,
26] and fluid-conveying microtubes [
27,
28].
In addition to fundamental small-scale
solid structures, modified nonlocal models have been utilised to assess and
predict the mechanical behaviour of poroelastic, viscoelastic and biological
materials of small sizes [
29,
30,
31]. These structures include, but are not limited to, microtubules [
32,
33], nanoporous materials with
surface effects [
34]
and lipid micro-tubules [
35]. In all of these valuable studies, it has been demonstrated that
scale effects have a vital role to play in mechanical deformation. Stress
nonlocality described by the Eringen nonlocal elasticity (nonlocal scale
effect) is associated with small-scale interactions, leading to substantial
stiffness reduction in the structure. Furthermore, it has been recently
demonstrated that nonlocal models hold great promise as highly accurate
mathematical tools for the description and design of microscale systems and phenomena,
especially in biology such as microscale migration of cells [
36], microelectromechanical
response [
37] and wave
propagation in biological tissues [
38].
To the best of our knowledge, to date,
no nonlocal scale-dependent poroelastic model has been developed for the
mechanical deformation of materials with small-scale inclusions. In imaging
technologies such as ultrasound and optical elastography that utilise the
mechanical properties of a given poroelastic material to detect abnormalities,
mathematical models play a crucial role in the accurate visualisation of
mechanical characteristics [
5,
39]. However, conventional mathematical models are formed based on
classical elasticity theories that fail to capture size effects and thus cannot
be employed at ultrasmall levels [
13]. In this paper, stress nonlocality-based size effects on the
mechanical response of poroelastic materials with small-scale inclusions are
studied for the first time. Furthermore, this research represents the first
integration of nonlocal elasticity and a light gradient boosting machine for
addressing inclusion problems. The proposed nonlocal scale-dependent model of
poroelasticity developed in this paper could be used in elastography imaging
techniques to accurately detect inclusions of ultrasmall sizes.
A case study of a potential
application of this model is investigated. The detection of small-scale tumours
in breast tissue (poroelastic medium) is considered as the undesirable
microscale inclusion. To include size dependency, nonlocal elasticity theory is
utilised. The influences of tissue fluid content, hydraulic conductivity and
microfiltration are captured by using a modified version of poroelasticity
theory. The governing differential equations are derived by decoupling the
scale-dependent constitutive relations and equilibrium equation in the
spherical coordinate system. To discretise the decoupled differential
equations, Galerkin method is employed. An accurate solution is presented with
the use of the precise integration method and Dormand–Prince technique. A light
gradient boosting machine learning model is also presented to extract and learn
the underlying patterns in the mechanical behaviour of spherical poroelastic
inclusions. To optimise the model, a grid search cross validation approach is
implemented. A detailed examination of the effects of nonlocal scale
coefficient and inclusion size on the time-dependent fluid pressure and radial
displacement is presented.
2. Nonlocal Poroelasticity Modelling
In this section, a nonlocal
scale-dependent model is developed for poroelastic materials including
small-scale spherical inclusions. In biomedical applications, small-scale
inclusions of interest to be detected by ultrasound imaging or other imaging
techniques are usually a clump of cancer cells with a stiffness lower than
healthy cells [
8,
9].
This softening behaviour can be effectively incorporated using nonlocal
continuum mechanics as stress nonlocality is associated with structural
stiffness softening. An appropriate model for this case is a refined
combination of Eringen’s nonlocal theory and poroelasticity to account for both
stiffness softening and fluid effects.
The conservation of mass for the fluid
content of a given poroelastic material can be written as [
40]
where
,
and
n are the fluid density,
fluid velocity and porosity, respectively. Moreover,
, “.” and
t indicate the
gradient operator, dot product and time,
respectively.
Similarly, the mass balance equation for the solid matrix is obtained as
Here
and
are the solid matrix density and
velocity, respectively. Assuming that the fluid part and solid components
(particles) are not compressible, and combining the mass balance Equations (1)
and (2), one obtains
where
is the
specific discharge that is associated with the relative velocity (
) as
where
It is assumed that the fundamental
solid particles and fluid part of the poroelastic material are individually
incompressible [
40]. However, the relative sliding, rotating and movement between these components
allow for the overall material and the solid phase as a whole to exhibit compressibility [
5]. The volumetric strain of the whole solid part (
) is related to the displacement
vector (
) by
Using Equations (3) and (6), the
following relation is obtained
According to Darcy’s
law, the specific discharge of a porous
material is proportionally dependent on the fluid pressure gradient (
) and the gravity vector (
) as [
40]
in which
,
and
represent the material permeability,
fluid viscosity and fluid pressure, respectively. Substituting Equation (8)
into Equation (7) and considering the effect of potential microfiltration [
41], the final version of the mass
balance equation (storage equation) is obtained as
where
and
denote the
hydraulic
conductivity and volumetric weight of the fluid, which are defined
by
and
, respectively.
is the Laplace operator. In the case
of biological inclusions such as solid tumours,
is the total microfiltration
coefficient, which is expressed by [
5,
41]
where
in which
and
indicate the tumour lymphatic and
vascular microfiltration coefficients, respectively.
,
and
stand for the vascular permeability, surface area and volume, respectively. Similarly,
,
and
are the lymphatic permeability,
surface area and volume, respectively. Equation (9) represents the storage equation of poroelastic
materials from biological tissues to porous micro-polymers. For applications in which there is no microfiltration effect,
is set to zero.
For spherical poroelastic inclusions,
the components of the total stress tensor (
) are related to the effective stress (
) and fluid pressure (
p) as
Effective stress components can be
interpreted
as the parts of the total stress
tensor that are responsible for porous material deformation. To detect an
inclusion in a given poroelastic medium, in many practical cases, it is assumed
that the average size of the inclusion is very small compared to the medium
size as the whole size [
5,
42].
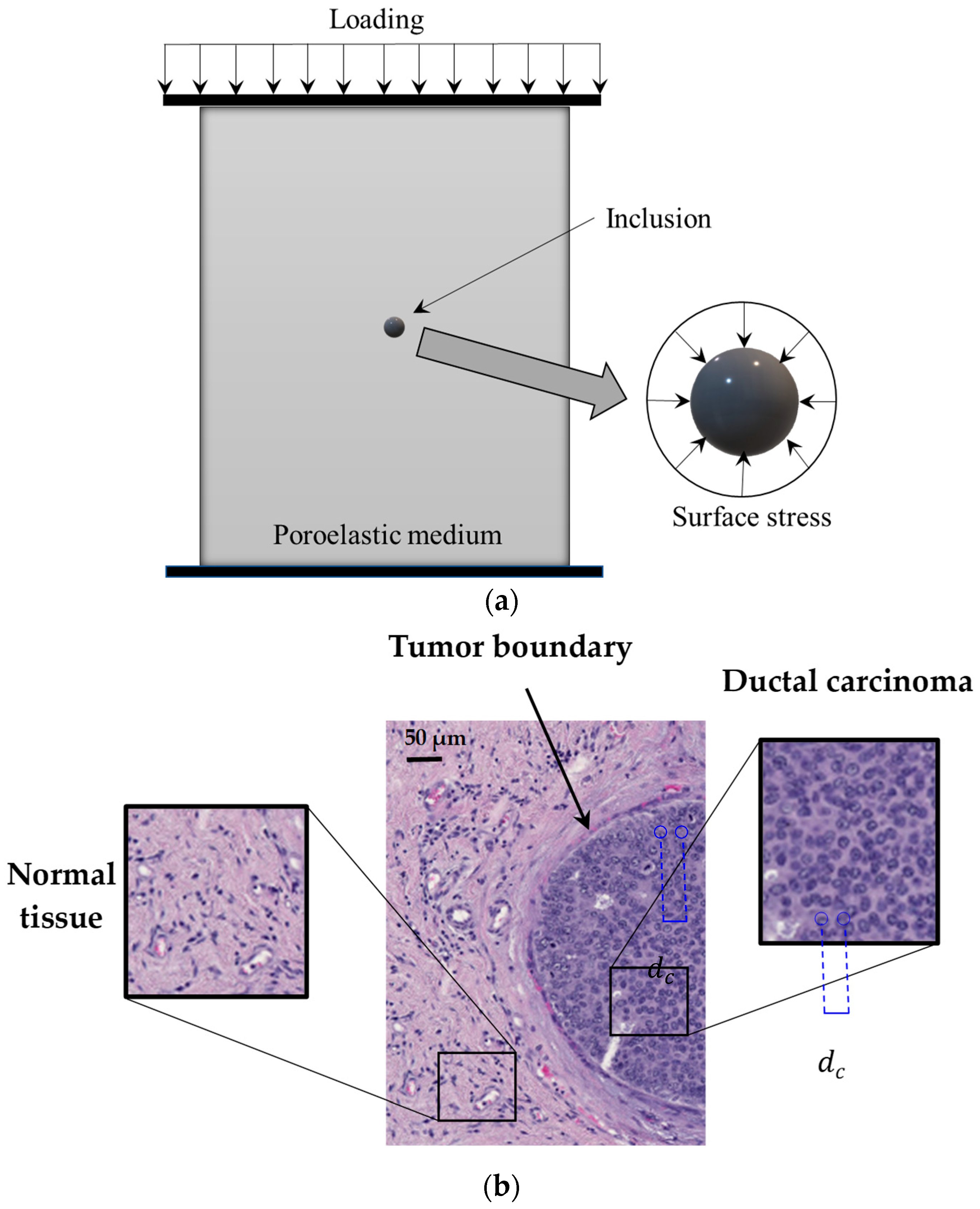
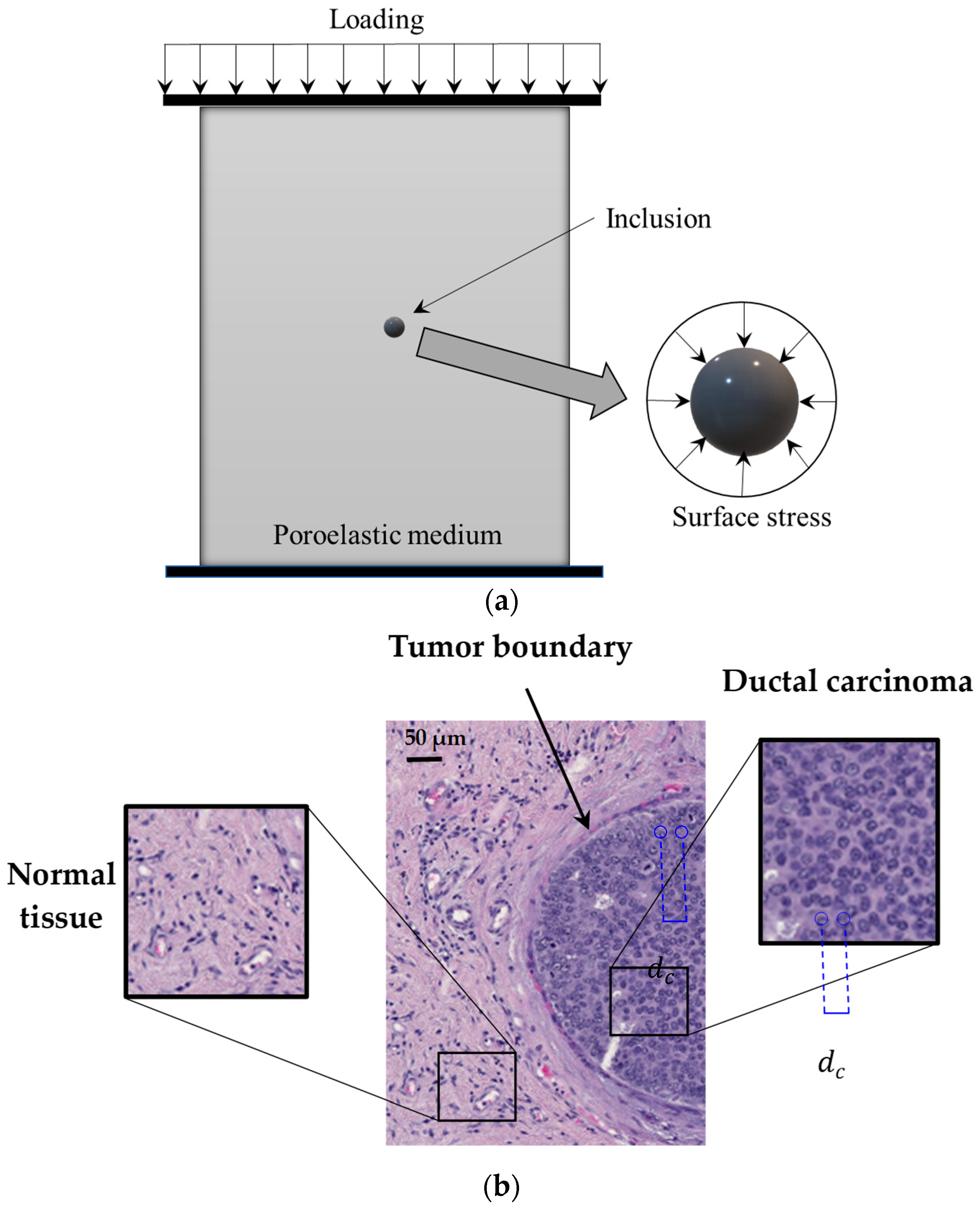
Figure 1 shows the schematic representation of a poroelastic medium
including a small-scale inclusion of a spherical shape. A slight compressive
load is applied on the top surface of the medium. A compressor plate is used to
make sure that the compressive load is uniformly distributed on the medium
surface. In practical applications, the compressive force is commonly applied
by utilising an ultrasound transducer, and a number of force sensors can be
used to measure the magnitude of the loading. Since the inclusion size is very
small compared to the distance from the inclusion centre to the loading
location, it is reasonable to assume that the spherical inclusion is subject to
a symmetric uniform radial load, as indicated in
Figure 1. Therefore, the
normal stress along the
direction is the same as that of the
direction (
). The equilibrium differential
equation is given by
where
r denotes the
radial
distance from the inclusion centre.
Substituting Equation (12) into the above equilibrium equation leads to
The average size of the inclusion is
very small compared to the background medium, and thus we can assume that the loading
condition is spherically symmetric on the inclusion surface [
5]; this assumption is made as
this study deals with the scale-dependent mechanics of ultrasmall inclusions.
Furthermore, it is assumed that the deflection caused by external loading is
small, leading to geometrical linearity assumption for strain-displacement
relations. In practical applications, especially in biomedical scenarios,
gentle mechanical forces are applied using devices such as an ultrasound
transducer or a mechanical probe. These loading systems are designed to be
comfortable and painless and induce only slight loads on patients’ bodies,
consequently resulting in small displacements and geometric linearity.
To capture the scale effects that are
related to the effective stress nonlocality, Eringen’s theory is used [
44]. According to this theory, the
effective stress at a particular point depends not only on the strain
components at that point but also on the strain components at all other points
of the porous material. The stress nonlocality assumption made in Eringen’s
theory allows us to take into account small-scale interactions from a
mechanical point of view. Based on the nonlocal theory of poroelasticity, the
effective stresses are expressed in terms of strain components as
where
Here
and
are Lamé
coefficients, and
G and
K represent the shear and bulk moduli of
the spherical inclusion, respectively.
and
are a calibration parameter and an
internal characteristics size, respectively. The product of these two features
is widely known as the nonlocal parameter (
). In addition,
and
are the strain component and
volumetric strain, respectively. This internal length-scale parameter could be
associated with the average distance between fundamental components within the
inclusion.
Figure 1b gives an example of a biomedical inclusion in the form of early
breast tumours. In the tumour, individual cells have developed in closer
proximity to each other compared to the surrounding healthy tissue. The
conditions of the above nonlocal constitutive equations are stress–strain
linearity and material homogeneity. Furthermore, reduced partial differential
equations of nonlocal elasticity, which were introduced by Eringen
[
44]
for a group of physically
admissible kernels, have been utilised. These constitutive equations were
obtained from the integral form of nonlocal elasticity by assuming that the
nonlocal modulus is Green’s function of a linear differential operator
[
44].
For spherical inclusions, strain
components can be written as
In Equations (18) and (19),
is the displacement along the radial
direction. The effective stress–strain Equations (15) and (16), together with
the equilibrium Equation (14), form three coupled partial differential
equations that govern the deformation behaviour of the inclusion. To calculate
the displacement, strain and fluid pressure, these differential equations need
to be decoupled first. For the sake of brevity, the procedure of decoupling is
not mentioned here. Substituting Equations (17)–(19) into the resultant
decoupled equation leads to
Using the relation of the volumetric
strain given by Equation (19), the mass balance Equation (9) can be rewritten
as
From the above equations, it is found
that the equilibrium equation in terms of the radial displacement and pressure
is dependent on nonlocal influences, while the mass balance equation is not
affected by the stress nonlocality, as expected. When the scale effects
associated with the stress nonlocality are ignored (i.e.,
), the governing differential
equations of the poroelastic material with an ultrasmall spherical inclusion
need to be reduced to those derived based on the classical poroelasticity
theory. Setting the nonlocal parameter equal to zero in Equation (20) yields
On the other hand,
the
first derivative of the volumetric
strain with respect to the radial distance is obtained from Equation (19) as
Substituting Equation (23) into Equation
(22), one obtains
Equation (24), together with the mass
balance Equation (21), are exactly the same as those widely reported in the literature for large-scale
porous spherical inclusions using the classical poroelasticity
[
5].
3. Solution Procedure Using Galerkin Technique and PIM
To discretise the nonlocal
scale-dependent governing equations using the Galerkin method, the radial
displacement and fluid pressure are required to be approximated by a set of
appropriate base functions that satisfy the boundary conditions. Consider a
spherical inclusion of radius
R embedded in a poroelastic medium under a
uniform radial compression, as shown in
Figure 1. From the symmetric condition, the radial
displacement is zero at the inclusion centre, while it reaches its maximum
value at the surface. By contrast, the fluid pressure is at its maximum at the
centre, whereas it is equal to that of the background medium at the inclusion
surface due to the continuity condition. Moreover, since the inclusion and its
loading are symmetric around the centre, there is no fluid flow at the centre
and, thus, the fluid pressure gradient is zero at that point. These boundary
conditions can be written as
in which
,
and
are the maximum radial displacement,
maximum fluid pressure and the background pressure, respectively. In general,
the nonlocal boundary conditions that are imposed on the displacement
components of the inclusion, such as the radial displacement boundary
conditions given by Equation (25), are the same as those of the classical
poroelasticity model. However, nonlocal boundary conditions associated with
stress components such as force resultants and moments deviate from their
classical counterparts because of the effects of the nonlocal constitutive
equations [
13]. In
this analysis, only stress nonlocality within the solid phase of the
poroelastic medium is considered, and thus all boundary conditions related to
the fluid phase, such as those specified by Equation (26), are the same as
their corresponding classical boundary conditions.
Based on the boundary conditions given
by Equations (25) and (26), the following expressions are suggested for the
radial displacement and the fluid pressure inside the spherical inclusion
where
and
are the base functions of the radial
displacement and fluid pressure, respectively. The number of base functions for
the inclusion displacement and pressure are denoted by
M and
N,
respectively. The proposed solution for the displacement and fluid pressure are
not uniform, as can be seen from Equations (27) and (28). The second part of
the solution on the right-hand side of these equations describes how radial
displacement and fluid pressure change by the radial coordinate
r.
However, it is assumed that the loading condition on the surface of the
inclusion is uniform. This assumption is made since the average size of the
inclusion is very small compared to the background medium and, thus, the load
is applied at a far distance from the inclusion. This makes the remote-load
assumption valid and, hence, the loading condition on the inclusion surface is
uniform according to the Eshelby theory [
5,
42]. In general, there are two types of widely used ultrasound
elastography: (1) quasi-static and (2) dynamic. In the quasi-static technique,
an external mechanical force is applied by a gradual compressive load, while in
dynamic elastography, mechanical load is induced using vibrating probes or
applying acoustic radiation forces [
45]. In this analysis, the ultrasound elastography mode is of a
quasi-static form, resulting in a static uniform load on the inclusion surface.
Substituting Equations (27) and (28)
into Equations (20) and (21), multiplying both sides of each governing equation
by its appropriate base function, and integrating over the whole volume of the
spherical inclusion, the following discretised equations are obtained
In general, the volume element in the
spherical coordinate system is
, where
and
are the azimuthal and polar angles,
respectively. Due to the symmetry of the problem, the element volume used to
perform the integration over the inclusion body in the above discretised
equations is
. The fluid pressure of the background
at the interface is assumed to be zero (
) [
5]. To avoid any numerical error caused by unscaled features and
parameters, a set of dimensionless parameters is introduced by
Here,
Hag is the aggregate modulus of the spherical inclusion. The discretised Equations (29) and (30) can be written in a compact way, as follows
where
,
,
and
are
calculated using Equations (29) and (30) by performing all integrations over the inclusion body. For the
sake of convenience, Equations (32) and (33) can be expressed in a matrix form
as
where
Equations (34) and (35) give a set of
time-dependent ordinary differential
equations in a matrix form. From these two equations, one can obtain
in which
is the initial value of the vector
at
. Matrix
H is defined by
Based on the
procedure
used in the precise integration method (PIM), a time step
dimensionless parameter
is introduced by [
46,
47]
Using Equation (40), the vector of
dimensionless
pressure
is calculated as
where
and
The recommended value for the
is twenty [
47], which is
commonly utilised in PIM. From Equation (43) and by adopting such a big value for
, it is found that the new time
interval
is very small. Thus, the following
approximation of the exponential function is valid by employing the Taylor
expansion
where
In Equation (44),
denotes the identity matrix. In view
of Equations (44) and (42), we have
The time-dependent part of the fluid pressure of the spherical inclusion is obtained by substituting Equation (46) into Equation (41). The time-dependent part of the radial displacement can be calculated by Equation (37). The
resultant time-dependent parts are then substituted into Equations (27) and (28) to obtain the final solution.
6. Analytical Solution for Local Large-Scale Spherical Inclusions
For the sake of comparison and
validation, an analytical solution is obtained for local large-scale spherical
inclusions where there are no scale effects. Setting the nonlocal parameter
equal to zero (
), the governing equations of the
inclusion are reduced to
Integrating both sides of Equation
(62) with respect to the radial coordinate parameter
r, the volumetric
strain is obtained by
where
denotes the
integration
constant that is generally related to the initial condition. For
simplification and ease of use, the subscripts “
tot” and “
ag” are
dropped from the microfiltration coefficient and aggregate modulus (i.e.,
and
),
respectively. The volumetric strain, fluid pressure and the integration
constant are [
5]
Substituting Equation (65) into Equation
(64) leads to
The second and first derivatives of Equation
(66) with respect to
r are
Using Equations (63), (66) and (67),
the following relation is obtained for the spherical inclusion
The integration constant is affected
by the initial conditions, and they can be taken in a way that this constant
becomes zero (
) [
5]. Let us define two dimensionless parameters as
and
. Using these definitions, Equation
(68) is expressed by
Now, a new parameter is introduced for
the sake of convenience as
Equation (70) is used to change the
variable in Equation (69) as
Performing the Laplace transform on
both sides of Equation (71) leads to the following equation in the
domain
where
It is observed that the Laplace
transform in conjunction with the change in variables results in a less complex
differential equation that is easier to be solved analytically. The solution of
Equation (72) can be written as
where
C1 and
C2
depend only on
s and are obtained by using the boundary conditions.
Substituting Equation (74) into Equation (70), we have
Using the first relation of Equation
(65), together with the definition of dimensionless time (
), the following relation is obtained
between
and
Taking the Laplace transform of Equation
(76) leads to
To calculate the coefficients of
, namely
C1 and
C2, the
boundary conditions of the spherical inclusion are used as follows [
49]
and
Here
,
and
are Poisson ratio, Young’s modulus and stress on the spherical inclusion surface, respectively. Taking the Laplace transform of Equations (78) and (79), and substituting Equations (75)–(77) into the resultant relations of the boundary conditions, one can obtain
Substituting Equation (80) into Equation
(75) leads to the following relation
Using the complex inversion integral
[
40], the Laplace transform inverse
of Equation (81) can be calculated as
where
is obtained from the following relation
7. Integration of Nonlocal Poroelastic Model with Light Gradient Boosting Machine
The nonlocal poroelastic model has
been developed based on some assumptions and limitations including material
linearity, spherical shapes for inclusions and small ratios of inclusion radius
to poroelastic medium length. However, in practical applications, a violation
of at least one of these assumptions could happen, which restricts the
application of the scale-dependent nonlocal poroelastic model. Overcoming all
the limitations of the above nonlocal model by the use of nonlinear nonlocal
poroelasticity is either impossible or comes with significant mathematical
challenges and computational costs. Integration of the nonlocal continuum model
of poroelasticity with a light gradient boosting machine (LGBM) enables greater
flexibility for extracting patterns in experimental and computational data, as
well as for incorporating additional effects such as nonlinearity and
geometrical imperfections. The LGBM is an open source, fast and efficient
gradient boosting framework developed by Microsoft [
50]
that has been recently used
for many machine learning tasks in various applications
[
51,
52,
53]. Its high speed, lower
memory usage and efficient performance, particularly when working on
large-scale datasets, make this machine learning algorithm an ideal candidate
to be integrated with the nonlocal poroelastic model. Another reason for
suitability of the LGBM is the capability of handling both regression and
classification problems. Inclusion models are often used to detect
imperfections and abnormalities such as solid tumours, in which both
classifications and regression tasks might be needed.
In the LGBM, a strong predictive model
is created by the combination of several weak estimators (decision trees). The
estimators are developed sequentially, in which each estimator tries to correct
the errors caused by the previous ensembled decision trees. A leaf-wise tree
growth approach is used, in which only leaves with maximum reduction in the
loss function are chosen to expand the decision tree. Compared to level-wise
tree growth, this approach generally leads to lower loss values and higher
accuracies. However, leaf-wise tree growth algorithms are more prone to
overfitting, especially on small datasets.
In this analysis, three different
types of boosting strategies are utilised for the LGBM integrated with the
nonlocal continuum model: (1) gradient-based one-side sampling (GOSS), (2)
dropouts meet multiple additive regression trees (DART) and (3) traditional
gradient boosting decision tree (GBDT). The GOSS utilises a subsampling
procedure to place more emphasis on subsamples with higher gradients. In fact,
subsamples with high gradients play a more significant role in building
decision trees. In addition to the general advantages of subsampling such as
variety introduction, rapid training process and less chance of overfitting,
GOSS-based subsampling benefits from improved efficiency, less memory usage and
faster convergence. On the other hand, the DART boosting algorithm addresses
the problem of over-specialisation by employing the idea of dropouts from deep
learning. During each iteration, random dropouts are conducted to avoid
over-reliance on earlier trees and improve the generalisation of the model.
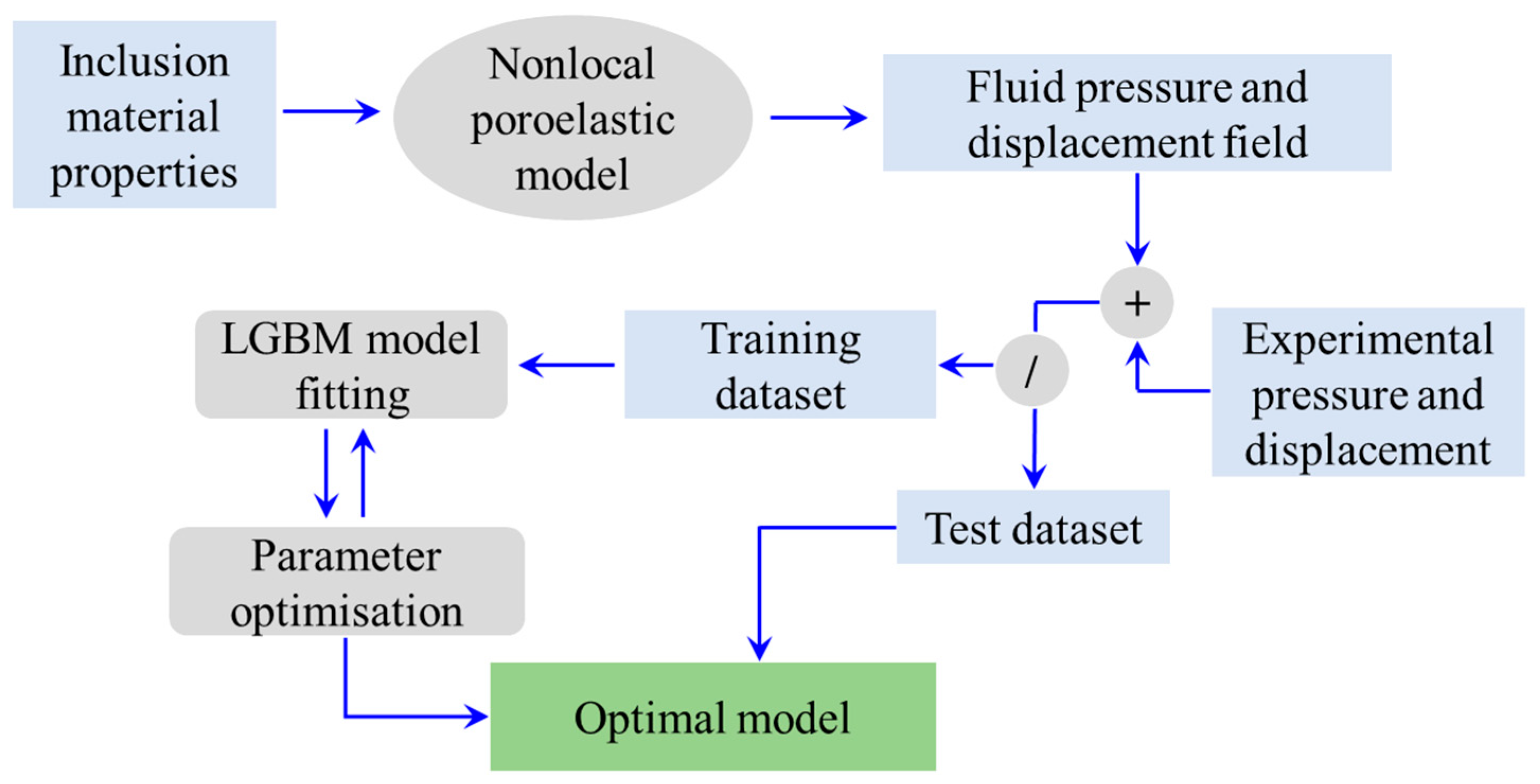
Figure 2 shows the required steps involved in the integration of the
nonlocal poro-elasticity model and the LGBM algorithm of machine learning.
First, inclusion features such as average radius, nonlocal scale coefficient,
elastic modulus, Poisson’s ratio and hydraulic conductivity, as well as the
times of interest, are given to the nonlocal scale-dependent model of
poroelasticity, and the inclusion’s pressure and radial displacement are
obtained. The calculated fluid pressures and displacements are then employed to
build a training dataset for fitting the LGBM model. Depending on the
availability of experimental tools and measurements, empirical observations can
also be supplied, leading to a more robust and accurate hybrid model of
poroelastic inclusions that would be capable of incorporating additional
effects such as nonlinearity and geometrical imperfections. Overall, nonlocal
poroelasticity results account for the underlying physics of the inclusion
problem, while the experimental data could help incorporate the violation of
any assumption made in the nonlocal continuum modelling.
In this study, the light gradient
boosting machine learning model is developed using open-source python libraries
including scikit-learn 1.2.2, pandas version 1.5.3, lightGBM 3.3.5 and NumPy
1.24.3. The scaling process is performed on numerical features such as
inclusion radius and nonlocal scale coefficient using the ‘StandardScaler’
function from the scikit-learn preprocessing package [
54]. This process is necessary to
assure that all numerical features are in the same standard scale, facilitating
model convergence and preventing certain features from being overshadowed by
others. A dataset of 34,100 data points obtained by the scale-dependent
nonlocal poroelastic model of small-scale spherical inclusions is used. The
test size is set to 30%, making training and test datasets of 23,870 and 10,230
points, respectively. The ‘ColumnTransformer’ function from the scikit-learn
compose package is utilised for the fast and robust transformation operation on
the columns of the data frame with the inclusion’s features. A machine learning
pipeline combined with a grid search cross validation framework is developed
for an efficient and smooth hyperparameter tuning process. The scoring metrics
for ranking machine learning models and finding the best configuration of
hyperparameters is set to the negative root mean squared error. The number of
estimators (decision tress) and leaves on each tree are taken in the range of 1–200
and 1–51, respectively, for the hyperparameter tuning. In addition, different
values of learning rate between 0.01 and 0.2 and various maximum depths in the
range of −1 to 100 are considered. Here, negative values are used to indicate
that there is no restriction on the number of leaves. The machine learning
pipeline includes three different boosting algorithms as GOSS, DART and GBDT.
The best LGBM estimator with the minimum root mean squared error is obtained
and applied for predicting the inclusion fluid pressure or radial displacement
on unseen test data.
8. Results and Discussion
In this section, the results of the
nonlocal poroelastic model and LGBM are presented and discussed on one of the
most common applications of the inclusion–background models, which is the
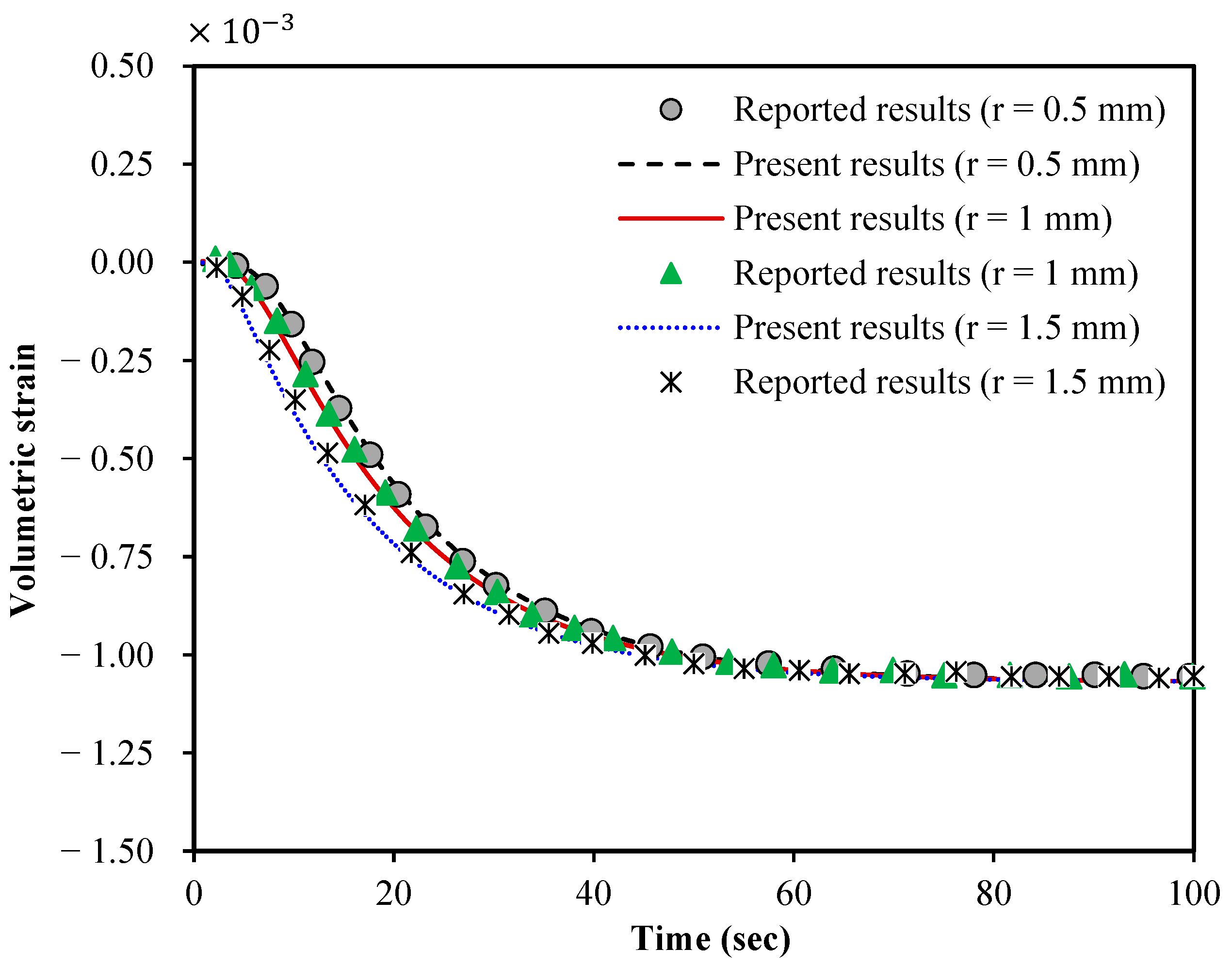
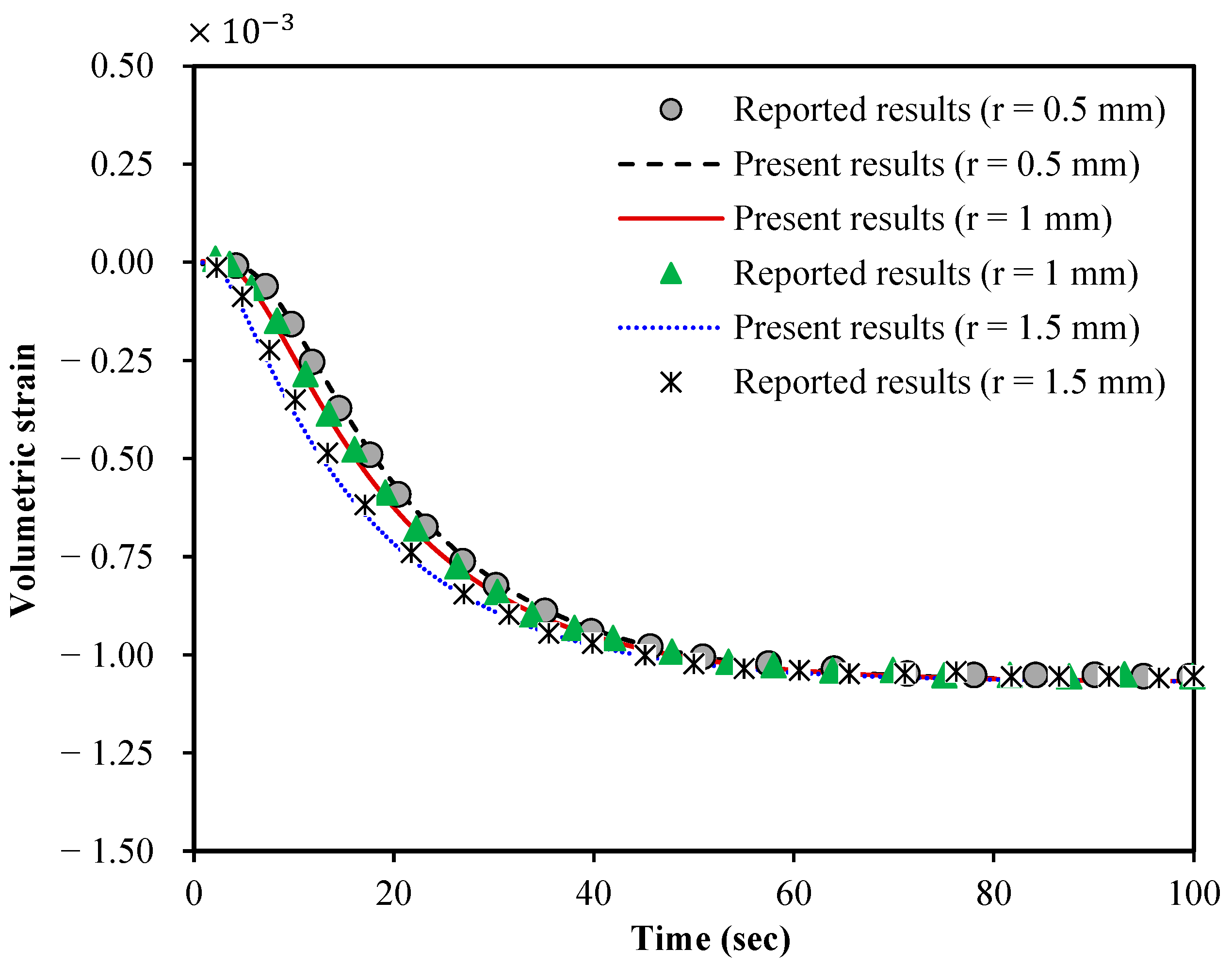
mechanical behaviour of solid tumours. First, to verify the accuracy of the
nonlocal poroelasticity modelling, the volumetric strain of the present model
is plotted in
Figure 3
and compared to the one reported in Ref. [
5]
for local large-scale spherical
tumours using the classical poroelasticity theory. The results are shown at
various radial distances from the centre of the solid tumour. The tumour
radius, Young’s modulus, Poisson’s ratio, hydraulic conductivity per volumetric
weight and microfiltration coefficient are, respectively, taken as
R = 3
mm,
E = 97.02 kPa,
= 0.45,
= 1.8 × 10
−13 m
4/Ns,
= 5 × 10
−9 1/Pa·s [
5]. To make a reasonable
comparison, scale effects related to the stress nonlocality are neglected. It
is found that the results of our modelling approach closely match those
reported in the literature.
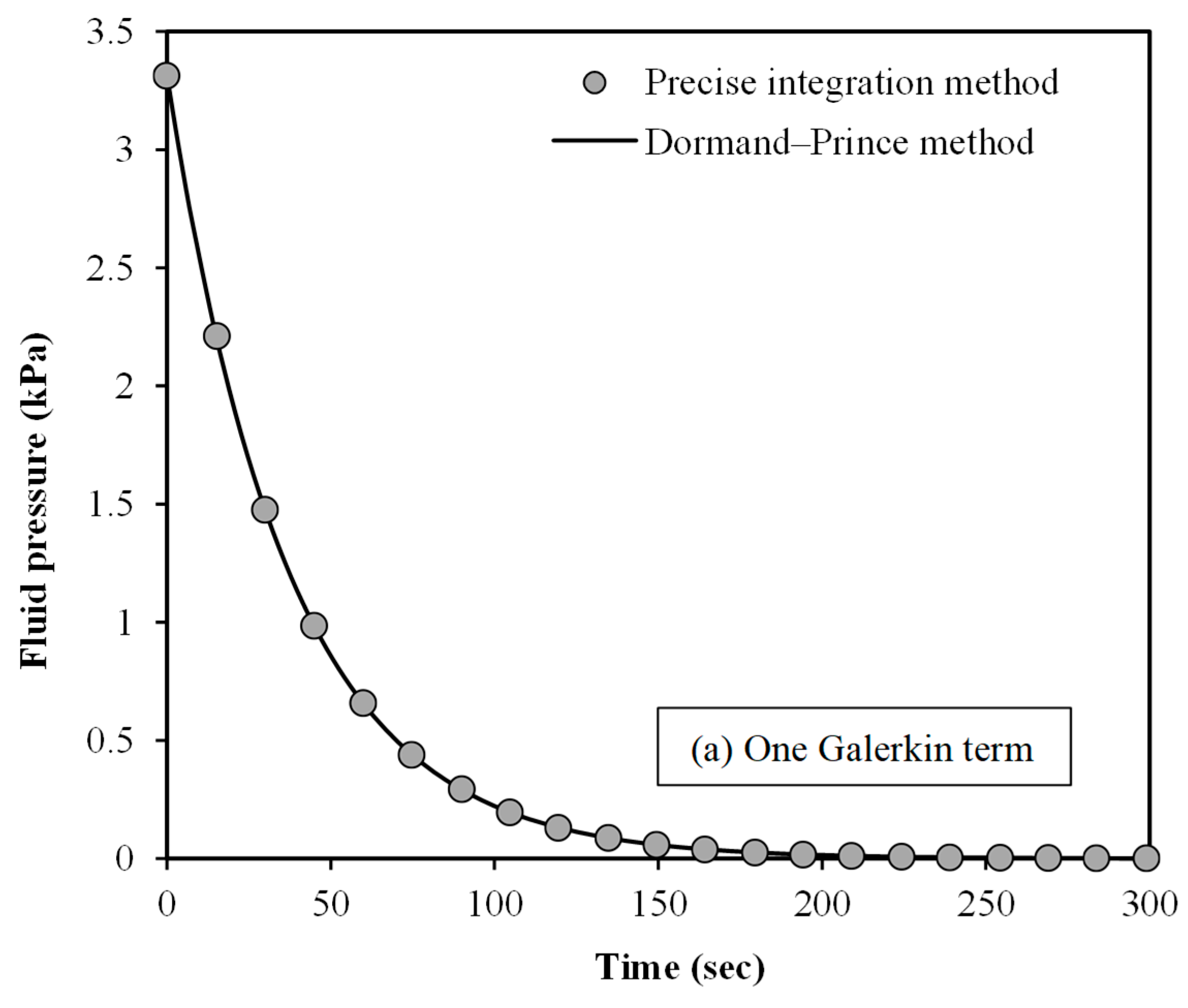
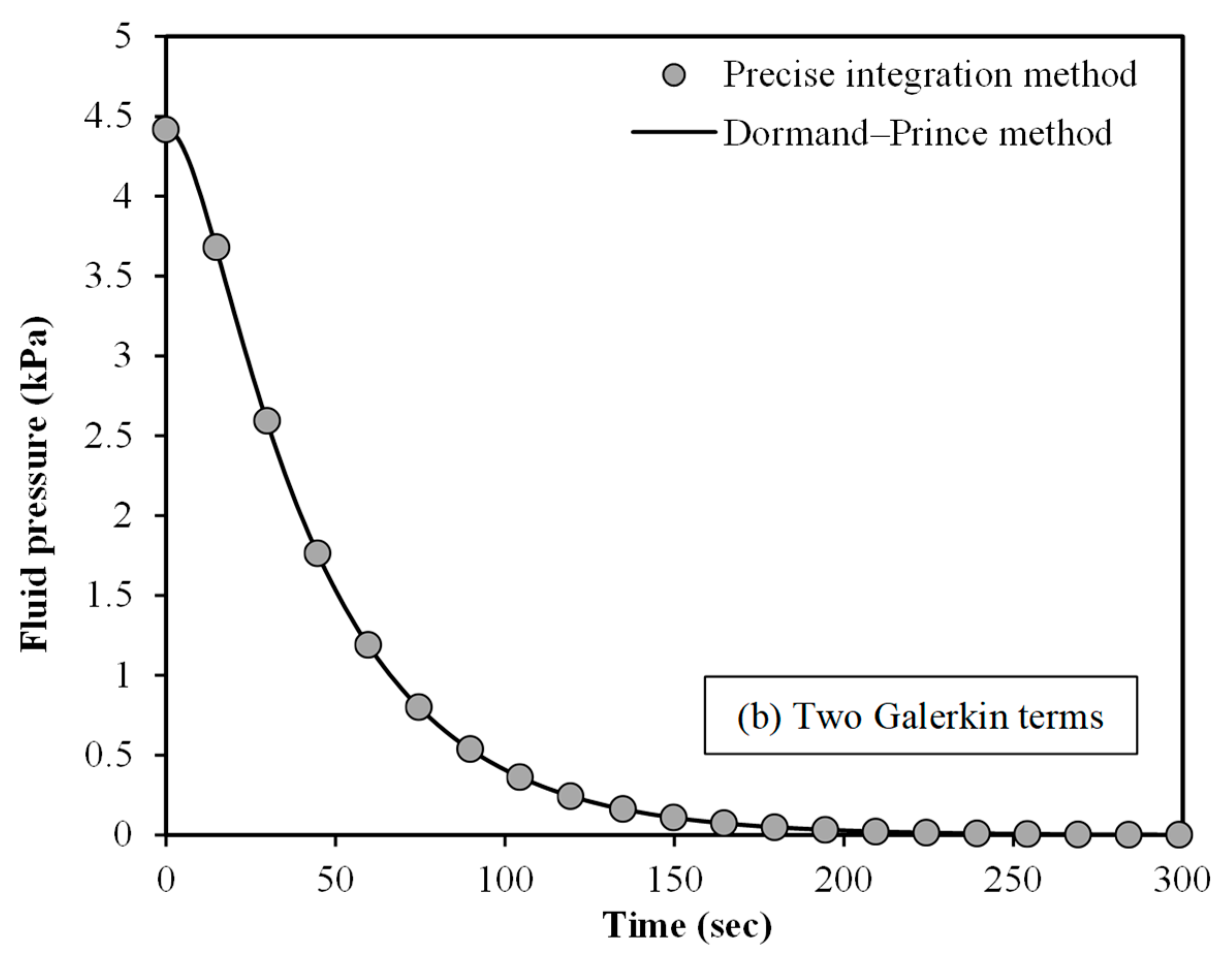
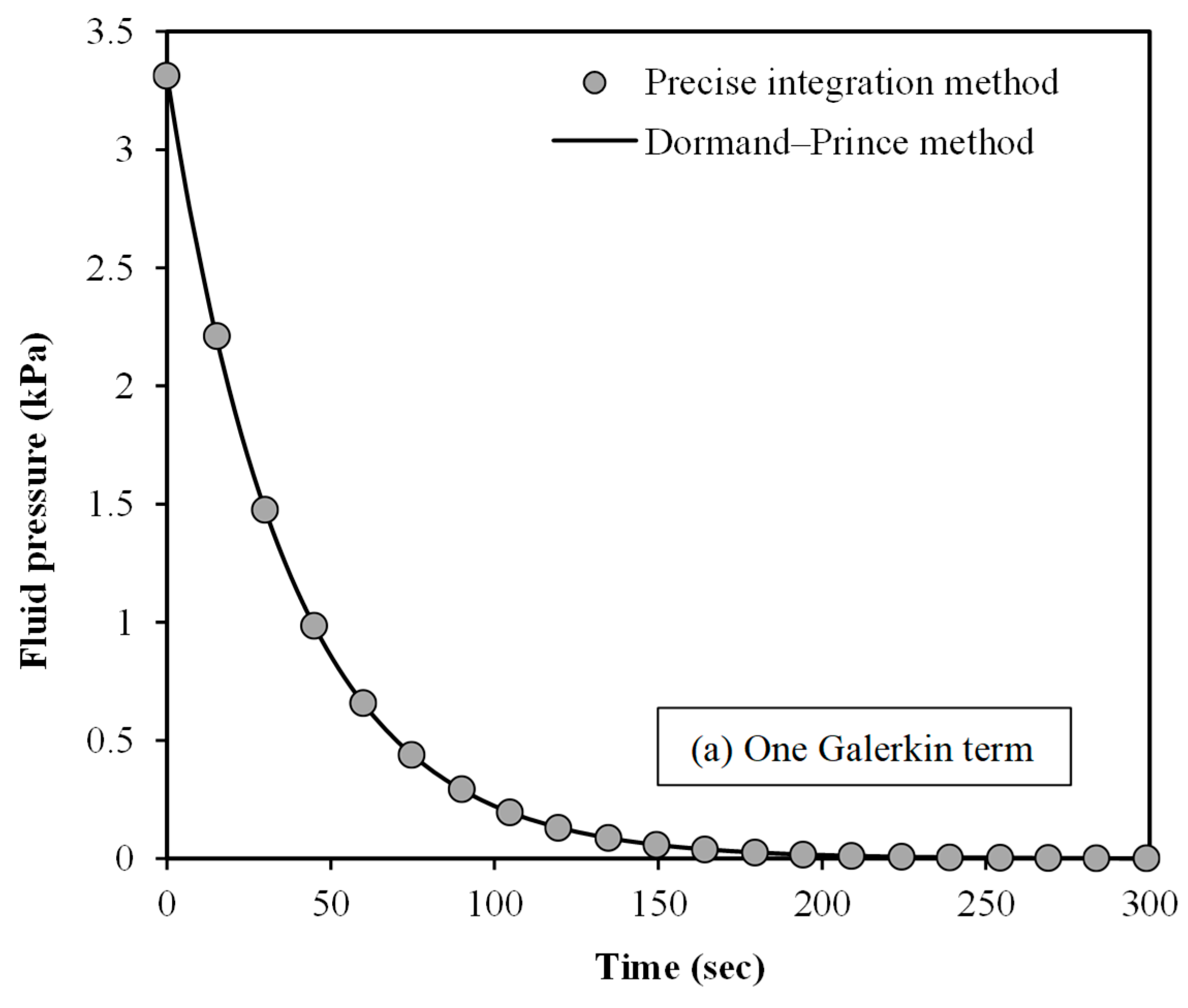
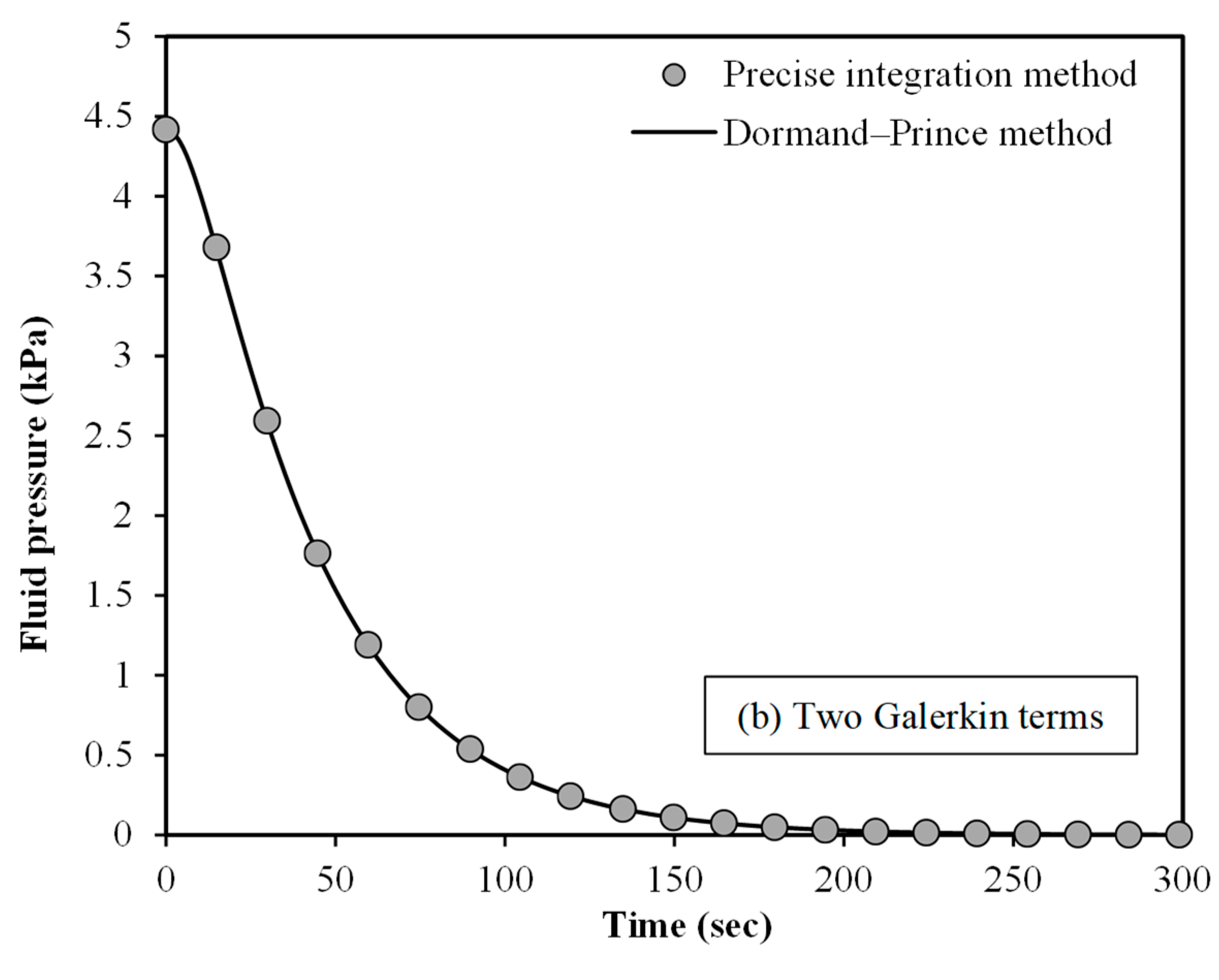
To further prove the validity of the
mathematical scale-dependent modelling, the fluid pressure within the spherical
tumour is plotted against time in
Figure 4. The numerical results are demonstrated for two different solution
procedures: (1) PIM and (2) Dormand–Prince method. Moreover, one and two
Galerkin terms are assumed in
Figure 4a,b, respectively. The fluid pressure is calculated at
r = 0.5
R. The initial value of the dimensionless fluid pressure is set to 0.01.
The Dormand–Prince solution procedure is implemented using a Matlab program. An
excellent match is found between the two numerical techniques for the fluid
pressure of spherical tumours using the scale-dependent nonlocal
poroelasticity.
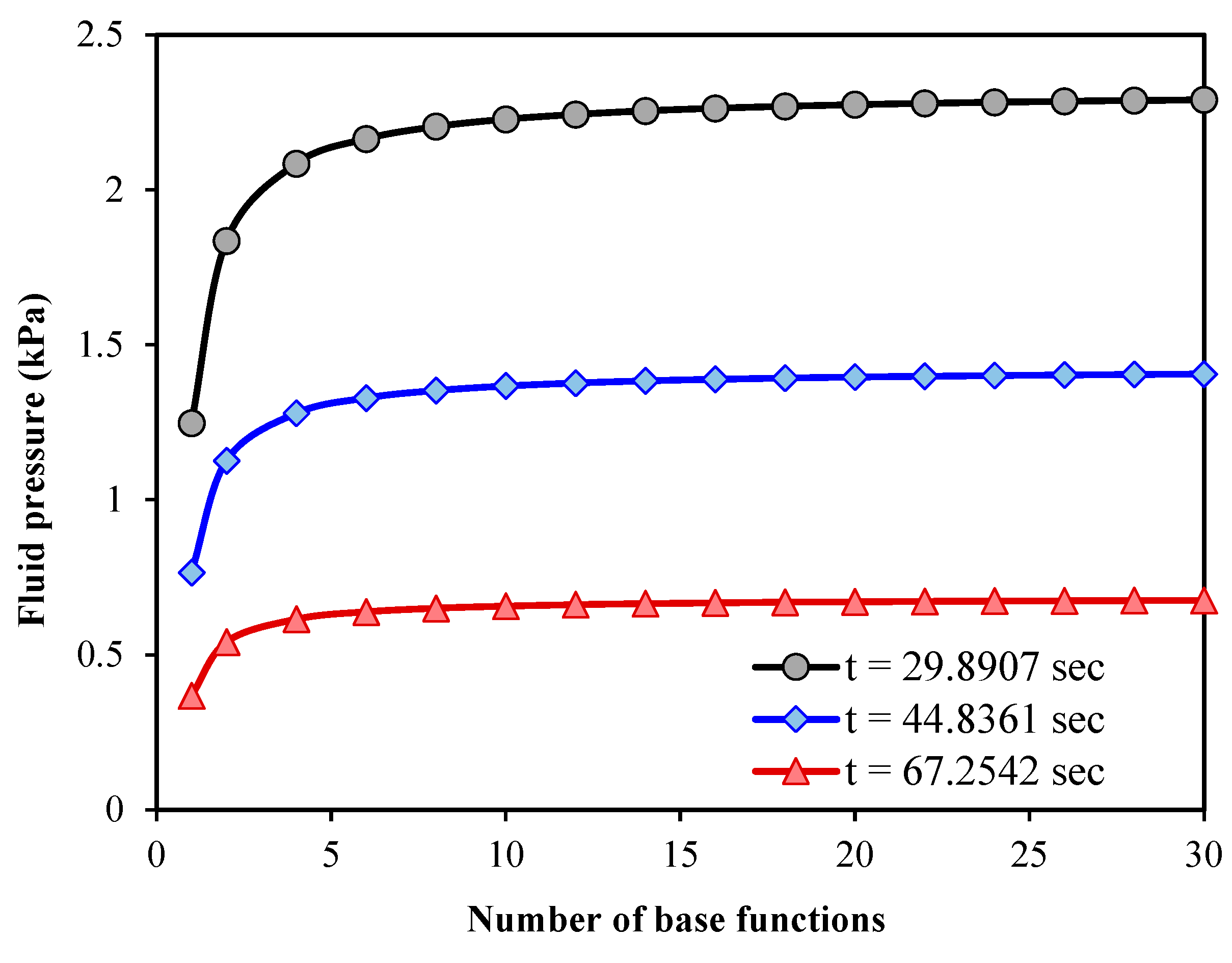
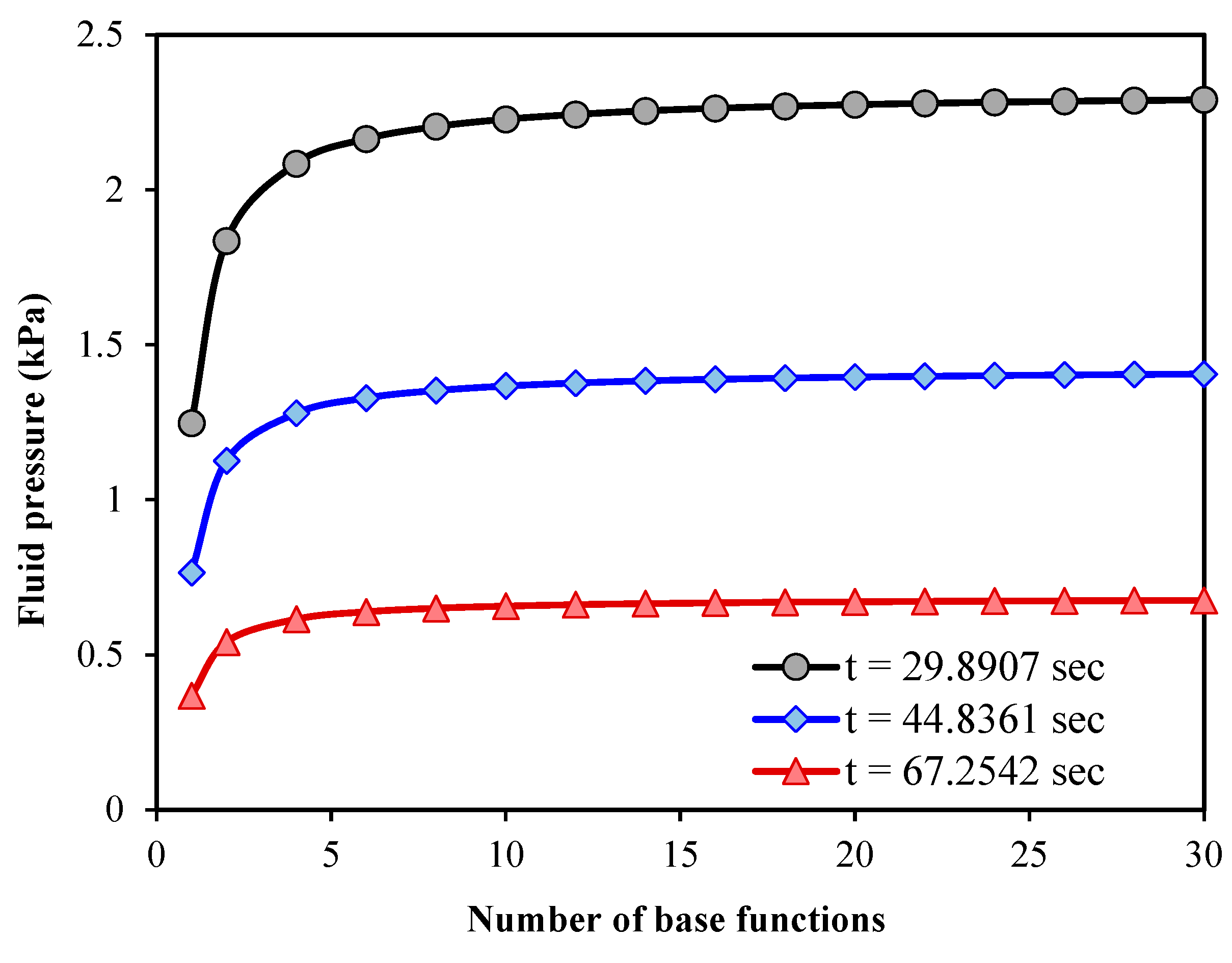
To show the convergence of the
solution, the tissue fluid pressure is shown in
Figure 5 versus the number of
base functions. The calculations are performed for three different time values.
The tumour radius, Young’s modulus, Poisson’s ratio, hydraulic conductivity per
volumetric weight and microfiltration coefficient are the same as those mentioned
above for plotting
Figure 3. The fluid pressure is numerically obtained at the midpoint between
the tumour centre and surface. It is found that after about ten base functions,
the results are converged in all cases.
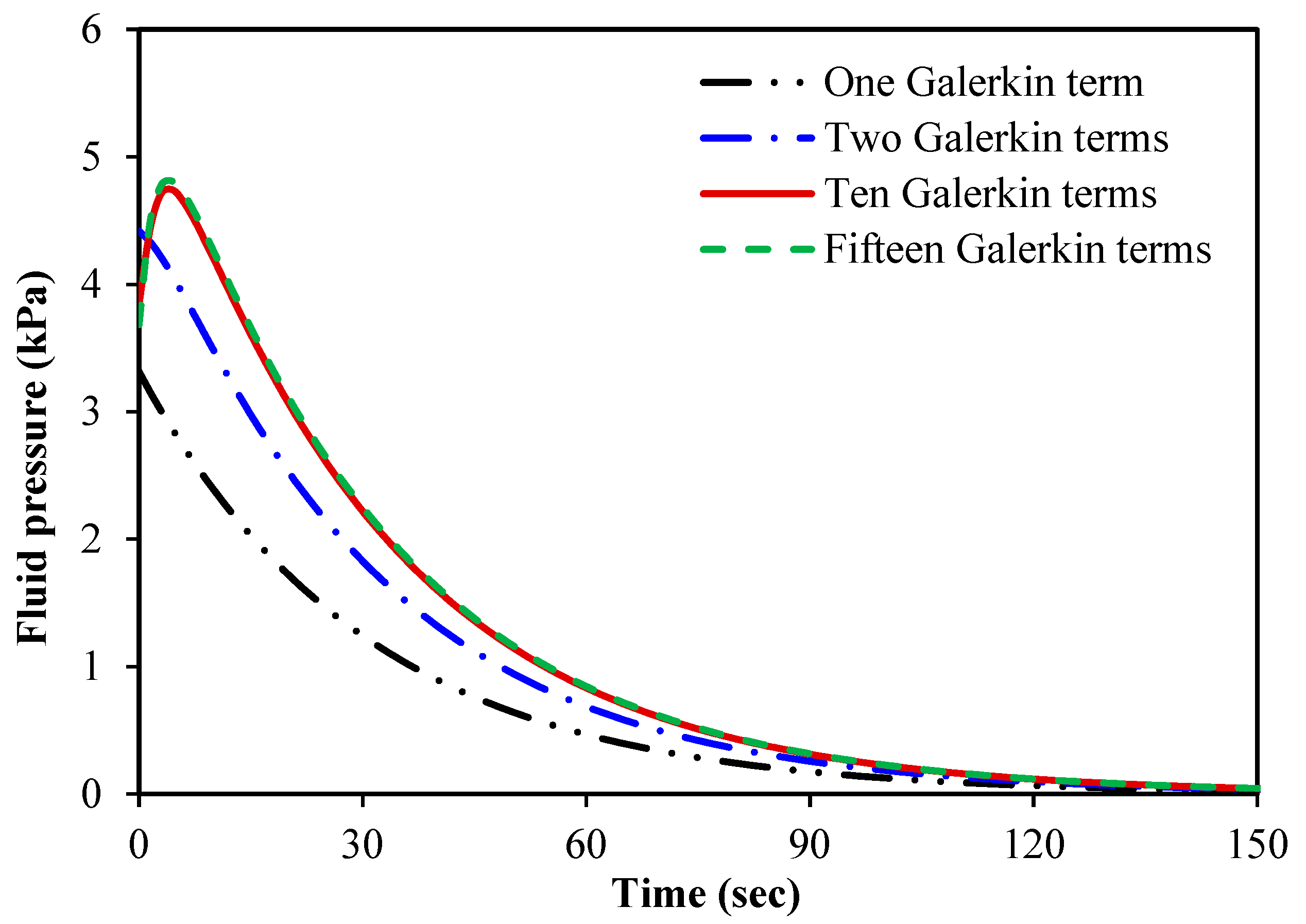
Figure 6 illustrates the fluid pressure of a spherical tumour
against time for four various Galerkin terms (base functions). This figure
shows how important it is to consider a sufficient number of Galerkin terms in
calculating the fluid pressure of the tumour. Neither one nor two Galerkin
terms are sufficient to obtain a reliable numerical solution. However, the
cases of ten and fifteen base functions are very close to each other, which
indicates that the results converge.
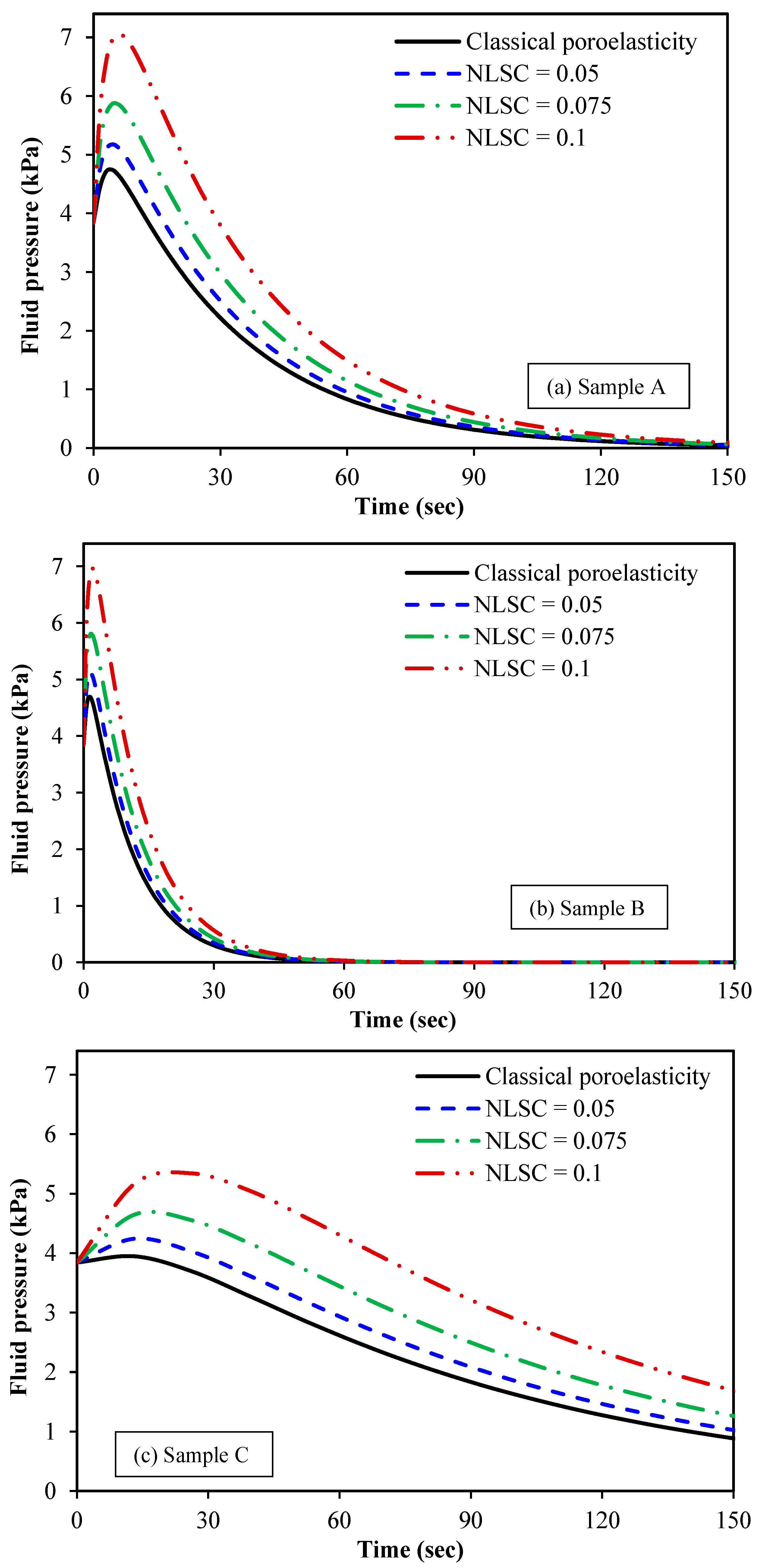
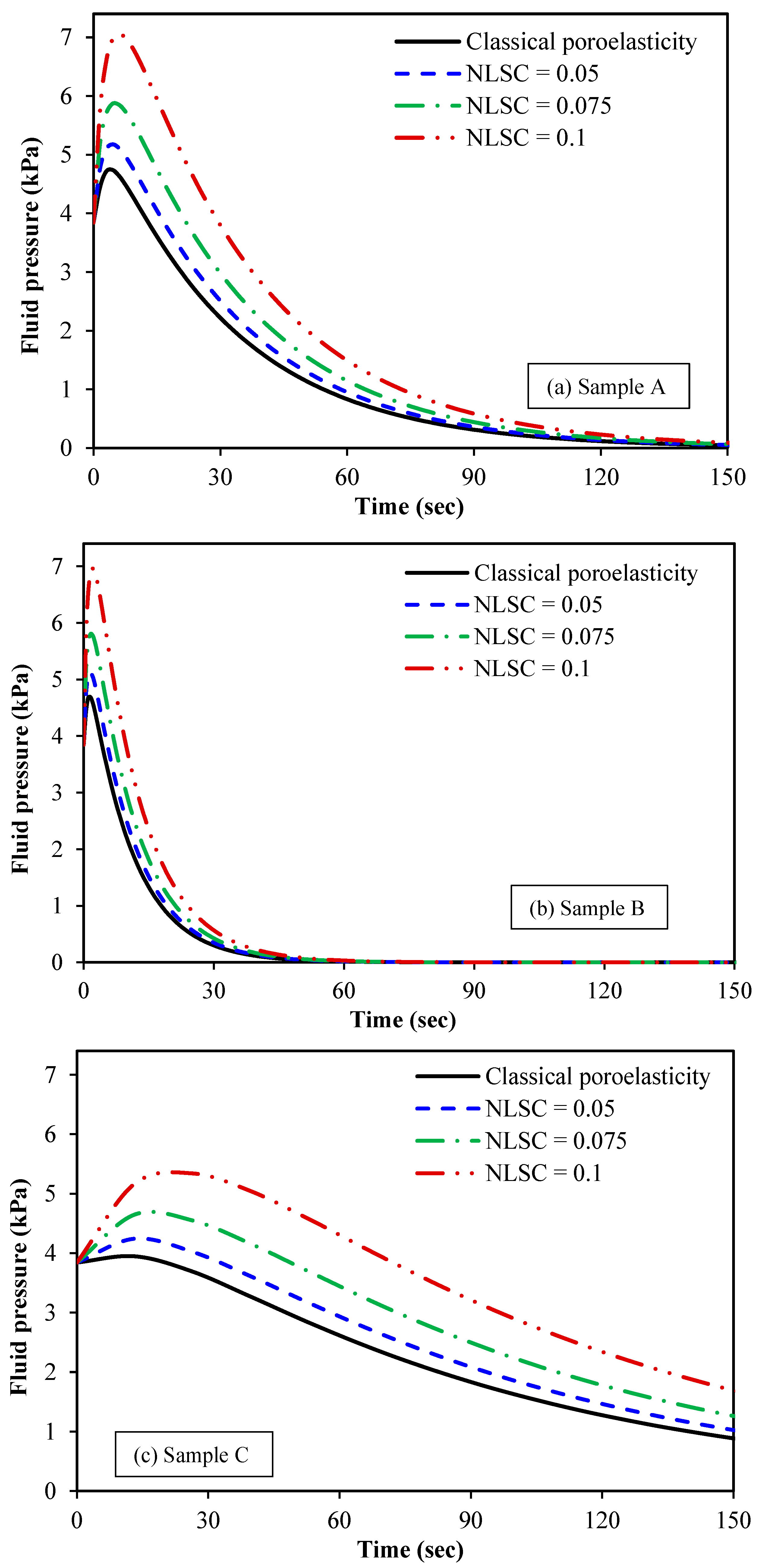
Figure 7 is plotted to discuss the influence of the nonlocal scale
coefficient (NLSC) on the fluid pressure of the spherical tumour. The NLSC is
defined as the ratio of nonlocal parameter to the tumour radius as
, leading to a dimensionless scale
parameter related to the stress nonlocality. Ten base functions are considered
for both radial displacement and fluid pressure of the spherical tumour. Three
different biological samples are taken into account for the spherical tumour.
The poroelastic properties of these samples are listed in
Table 1. The radius of the
spherical tumour is set at
R = . For comparison purposes, the case of
classical local poroelasticity, in which scale effects are ignored, is also
considered. It is observed that as the NLSC is increased from 0 to 0.1, the
fluid pressure at
r = 0.5
R increases. This can be interpreted as
one consequence of stiffness reduction due to the nonlocal effect. An increase
in the NLSC leads to a considerable decrease in the structural stiffness of the
tissue solid matrix, and this means that the tissue becomes softer and the pore
fluid pressure is enhanced. From a clinical point of view, this finding is very
important as it would result in improving the resolution of elastography
imaging.
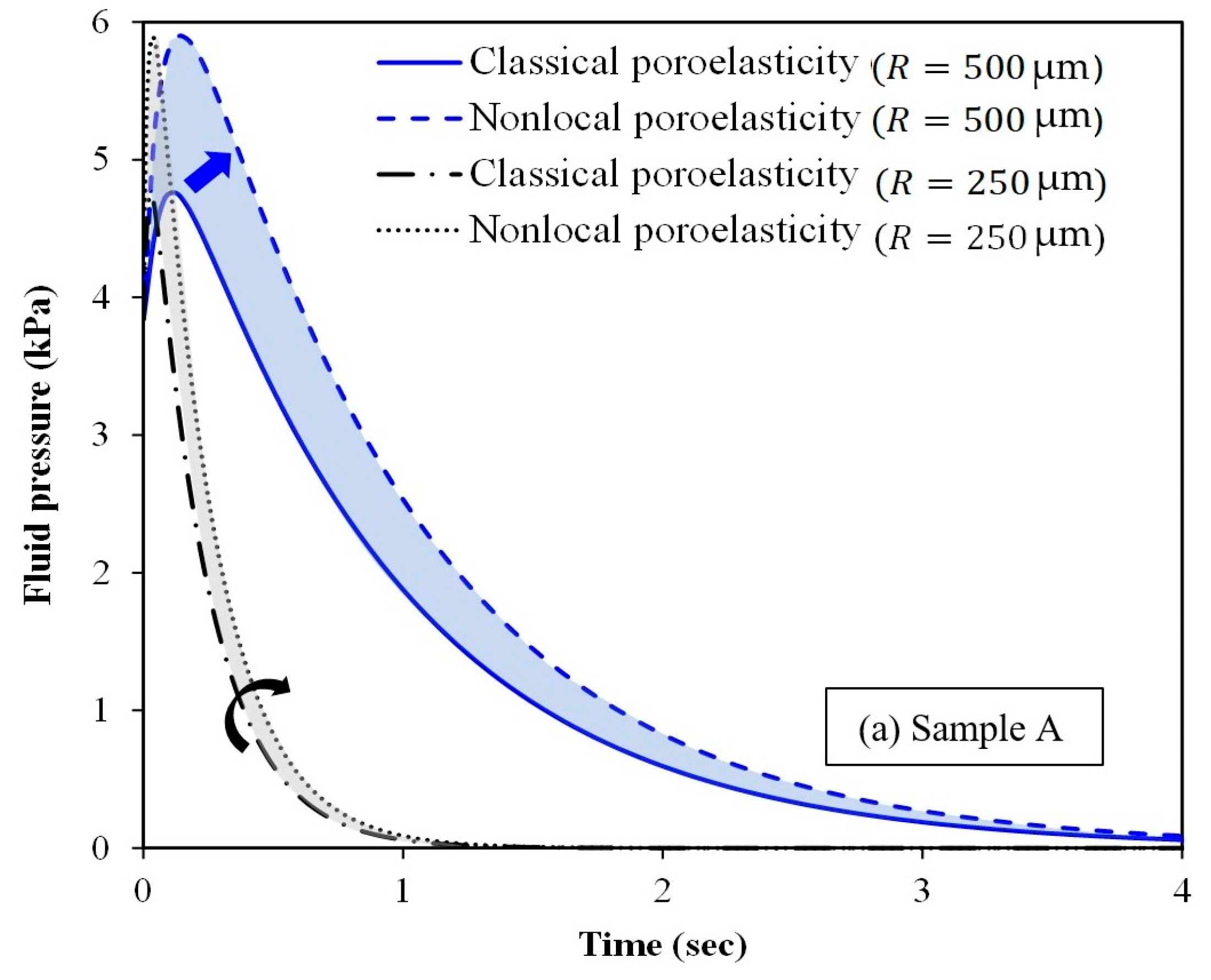
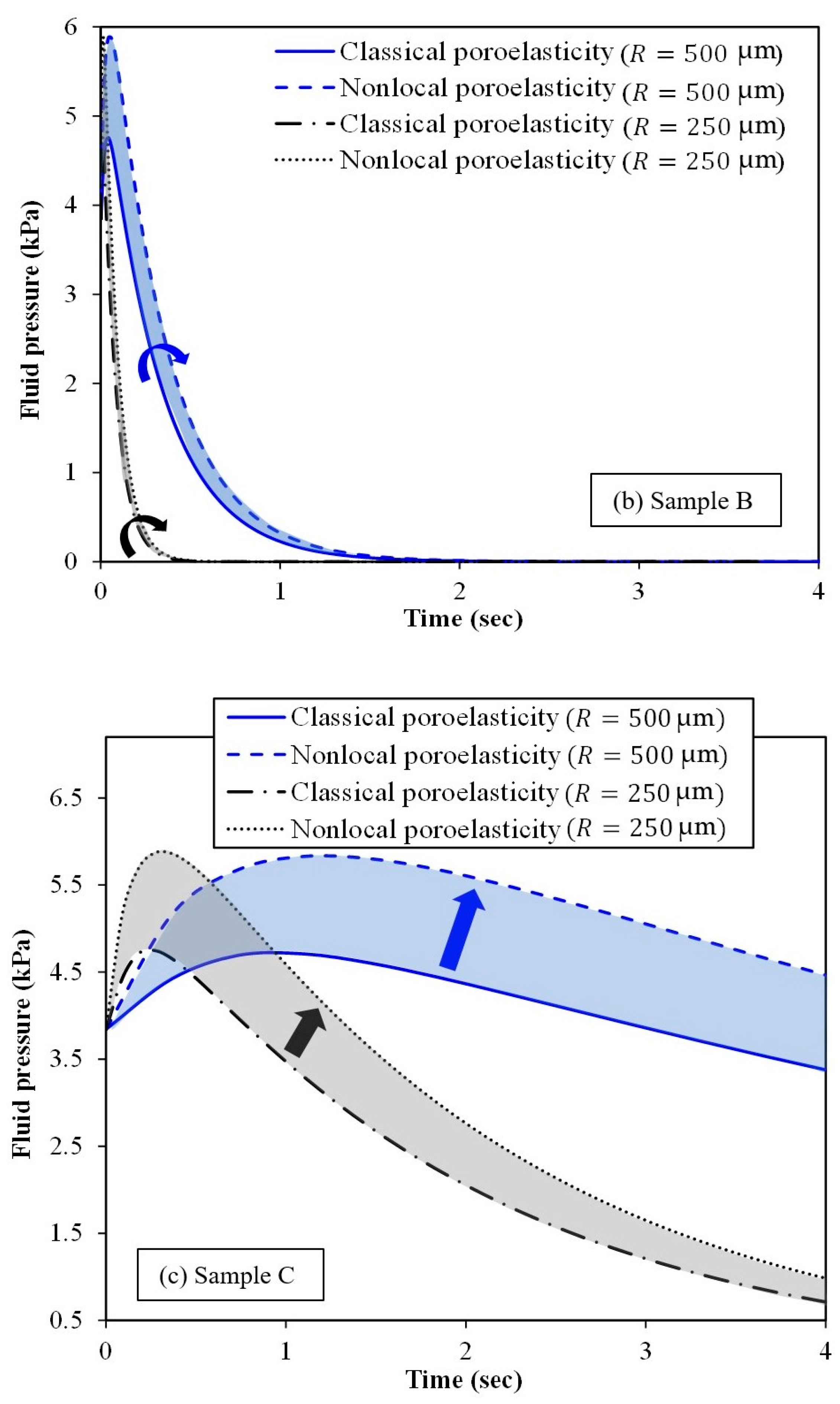
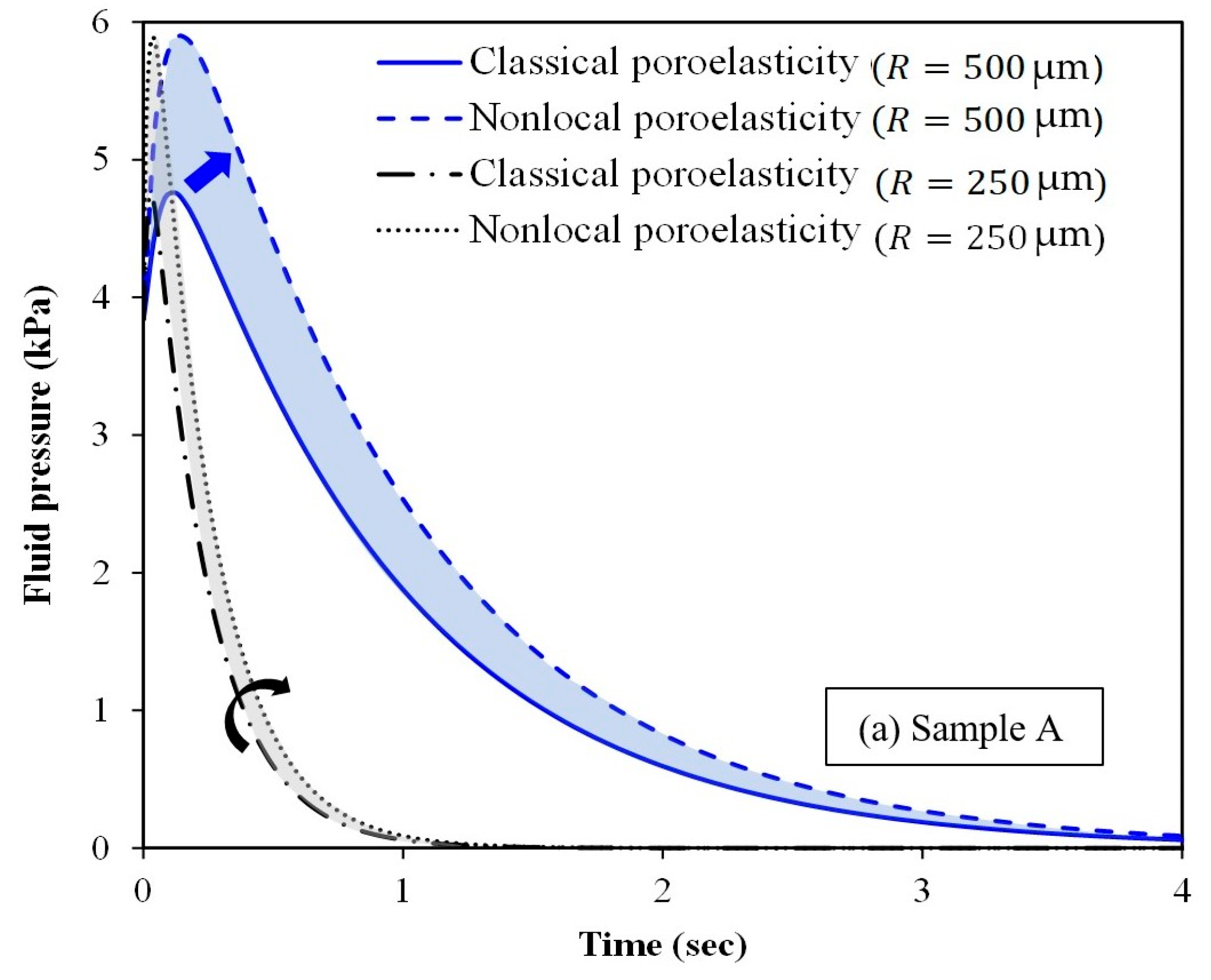
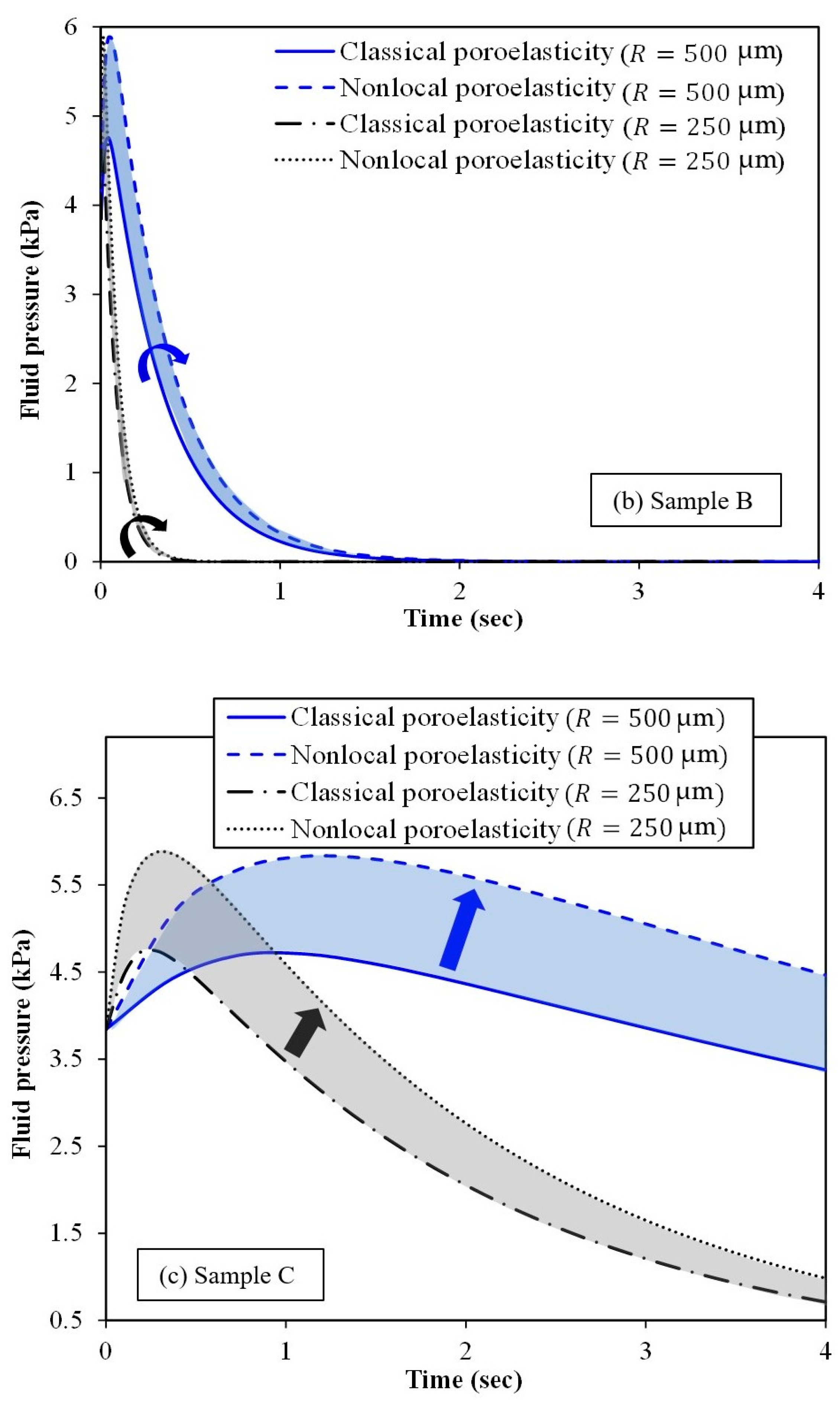
Figure 8 depicts the effect of spherical tumour size and time on the fluid
pressure at the half space between the tumour centre and surface. The figure
also compares the nonlocal scale-dependent poroelasticity with the classical
one for three different samples (samples A, B and C). When the radius of the
spherical tumour decreases, the fluid pressure decreases as well. Furthermore,
the fluid pressure gradually reduces over time. The only exception is the very
early moments of imposing the applied compressive loading. At a certain time
long enough after the loading, the fluid pressure vanishes inside the spherical
tumour. For smaller tumours, the specific time corresponding to the loss of
fluid pressure is considerably lower.
Figure 8 demonstrates the promising capability of the nonlocal
scale-dependent poroelasticity compared to the classical poroelasticity in
estimating the fluid pressure within spherical tumours of ultrasmall sizes
(less than 500 µm in radius). The clinical use of the proposed nonlocal
poroelasticity model could result in a substantial improvement in the accuracy
and sensitivity of the tissue mechanical property measurement using
elastography imaging, especially for tumours of small-scale sizes.
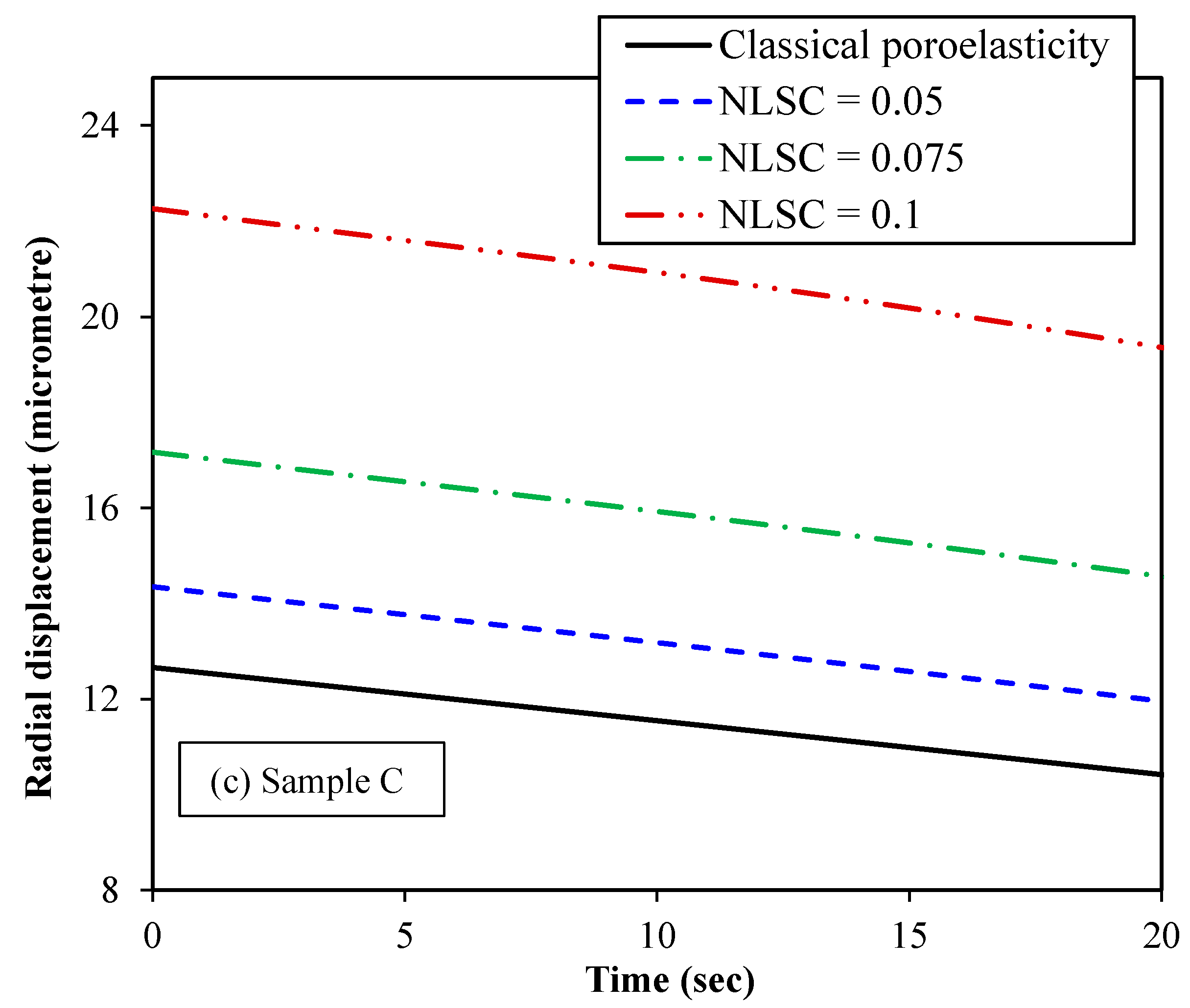
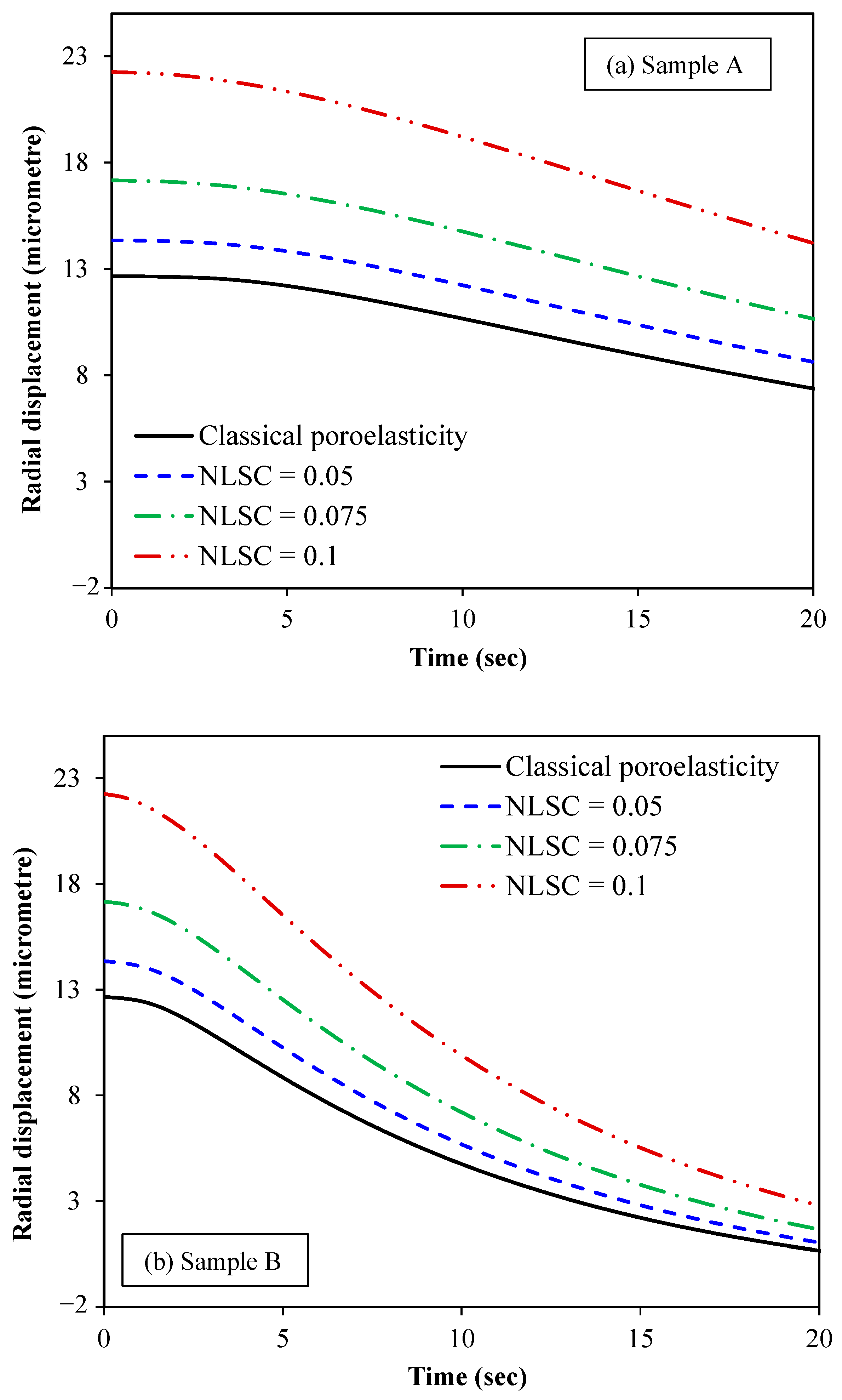
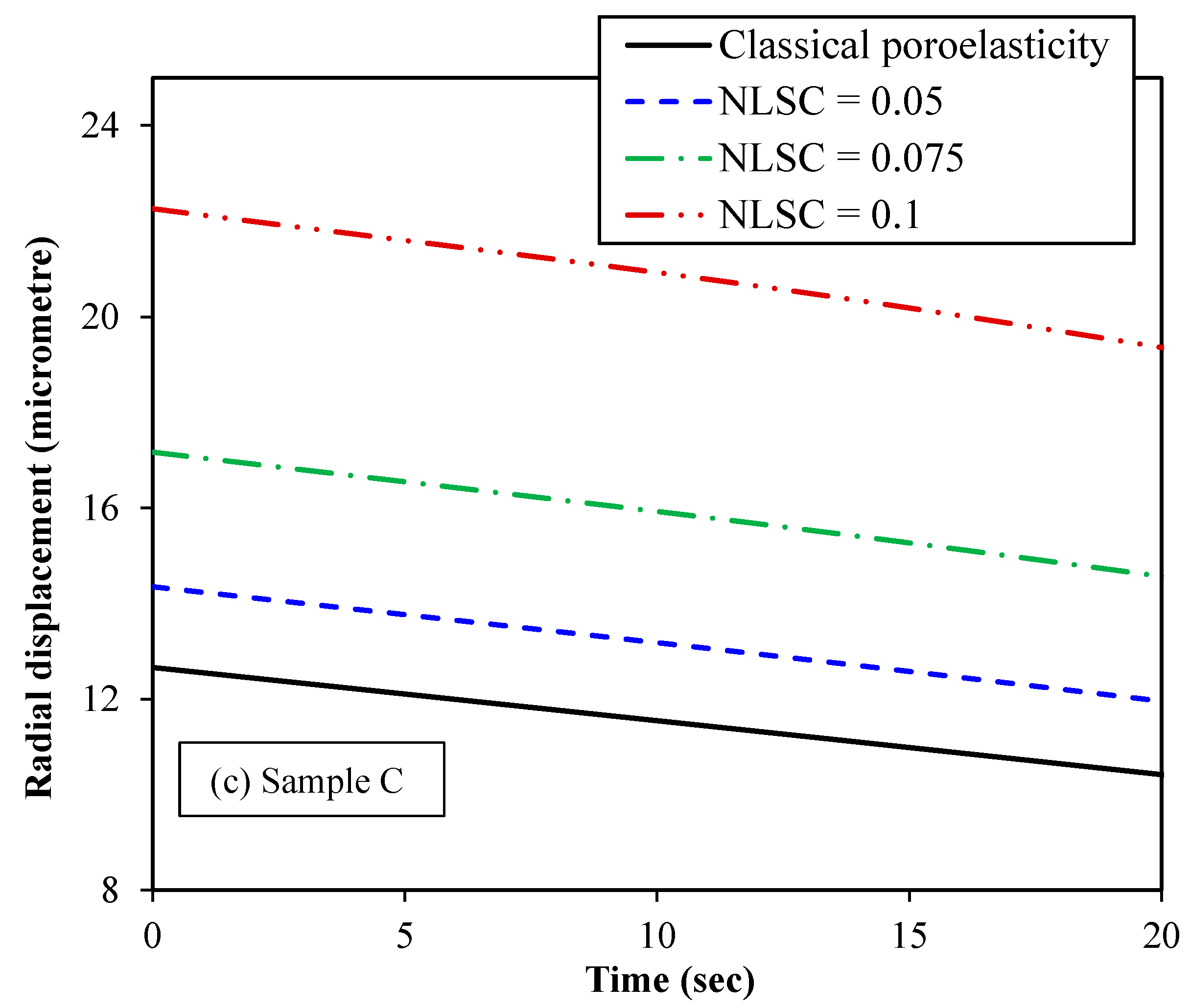
The variation in the radial
displacement with time is plotted in
Figure 9
for various values of NLSCs for the three different
biological samples. Young’s modulus, Poisson’s ratio and the geometrical
features of the three samples are the same. However, they differ in terms of
the hydraulic conductivity per volumetric weight and microfiltration
coefficient, as can be seen from
Table 1. The radial displacement is calculated at
r = 0.5
R.
Ten base functions (ten Galerkin terms) are supposed for both the radial
displacement and fluid pressure of the spherical tumour in all case studies.
From
Figure 9, it
can be concluded that the nonlocal scale coefficient has a vital role to play
in the mechanical behaviour of small-scale tumours. As the scale effect related
to the solid stress nonlocality inside the spherical tumour increases, larger
radial displacements are observed. The validity of this finding is backed up by
the evidence that nonlocal effects lead to a reduction in stiffness, making the
tissue more prone to mechanical deformation. This finding is very important
from a clinical point of view as the sensitivity and accuracy of the
elastography-based cancer diagnosis could be significantly improved by taking
into account these effects using the nonlocal poroelasticity theory.
A light gradient boosting machine
(LGBM) algorithm is presented and integrated with the scale-dependent nonlocal
poroelastic model of small-scale spherical inclusions. To show the accuracy and
capability of the integrated model, the results of the nonlocal model for
sample A are used as an example to build the training and test datasets. The
radius of the inclusion, dimensionless nonlocal scale coefficient and time are
used as the inputs of the LGBM model, while the fluid pressure at the middle
distance from the inclusion centre to its surface is adopted as the label of
the training and test datasets.
Table 2 lists some general statistical information including the mean,
median, maximum, minimum, first and third quartiles of the input features and
fluid pressure as the target variable. The dataset includes 34,100 records,
with 30% of them as the test data and 70% as the training data. A
hyperparameter tuning procedure based on the grid search cross validation
approach has been conducted to obtain the optimised parameters of the LGBM
model. The negative root mean squared error is used to assess the performance of
each configuration of the model parameters. The number of estimators and leaves
on each tree are taken in the range of 1–200 and 1–51, respectively. Different
learning rates between 0.01 and 0.2 and various maximum depths from −1 to 100
are also considered in the grid search cross validation. A negative maximum
depth means that there is no limitation in terms of the number of leaves on the
decision trees. Three different boosting types, GOSS, DART and GBDT, are
considered in this analysis.
Table 3 lists the results of the hyperparameter tuning for six different
LGBM configurations. The mean test score is the negative root mean squared
error of the training data. The optimised parameters of the best LGBM model are
obtained as learning rate = 0.1, maximum depth = 100, number of decision trees
= 200 and number of leaves = 51 (boosting type = GOSS). The root mean squared
errors of this model on training and test data are 0.03389 and 0.03083,
respectively. These values indicate the high accuracy of the LGBM model and no
sign of overfitting as the performance of the model is even better on the
unseen test data compared to the training data. In
Table 4, the predicted fluid
pressure is compared with the actual test fluid pressure obtained by the
nonlocal model at the mid-distance from the centre to the surface of the
spherical inclusion. Various values of the inclusion radii and nonlocal
coefficients are taken into consideration. It is found that the results of the
LGBM are in excellent agreement with those of the scale-dependent nonlocal
model of poroelasticity, indicating the promising capability of the light
gradient boosting frameworks to predict the mechanics of poroelastic
inclusions.
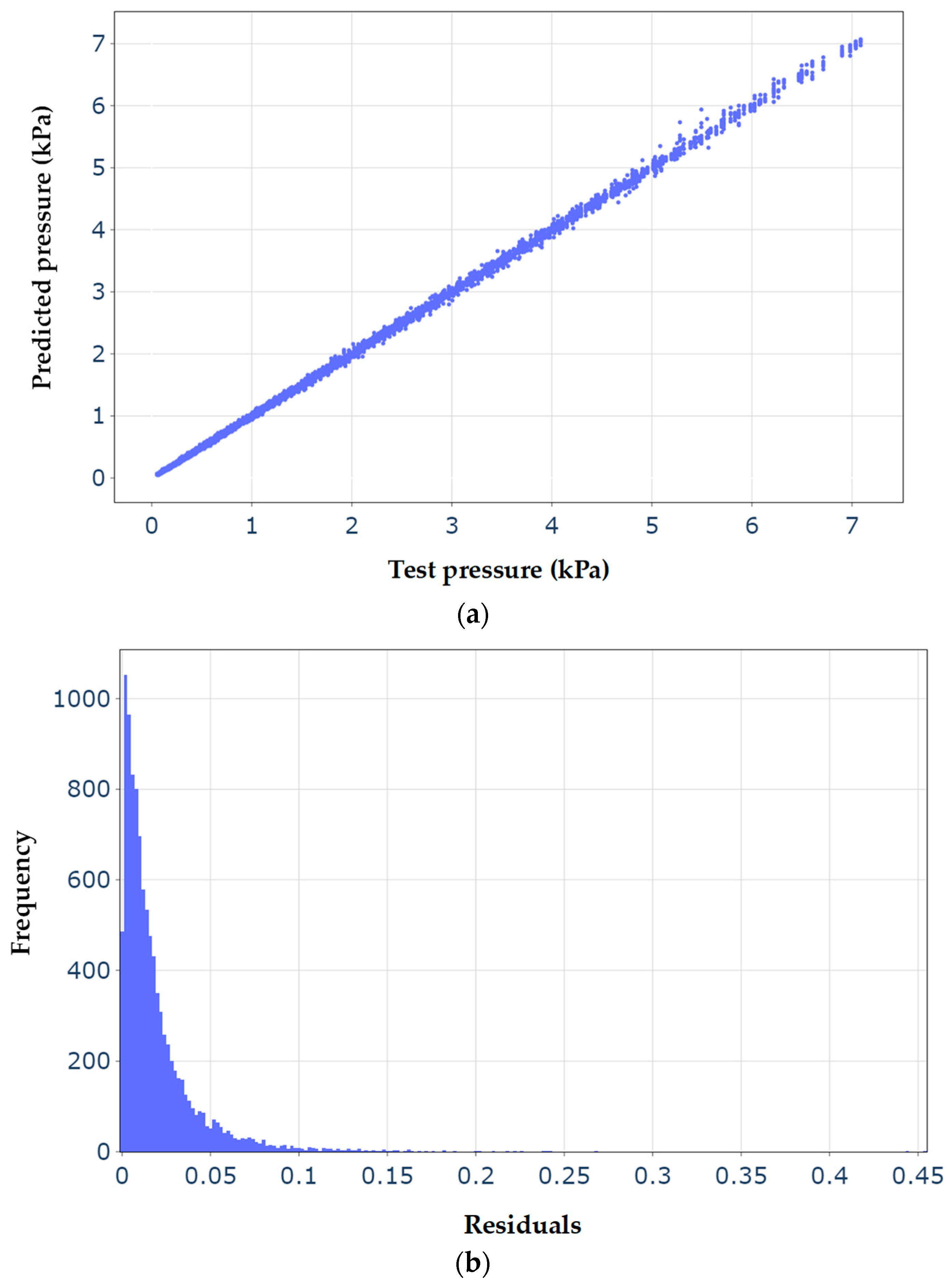
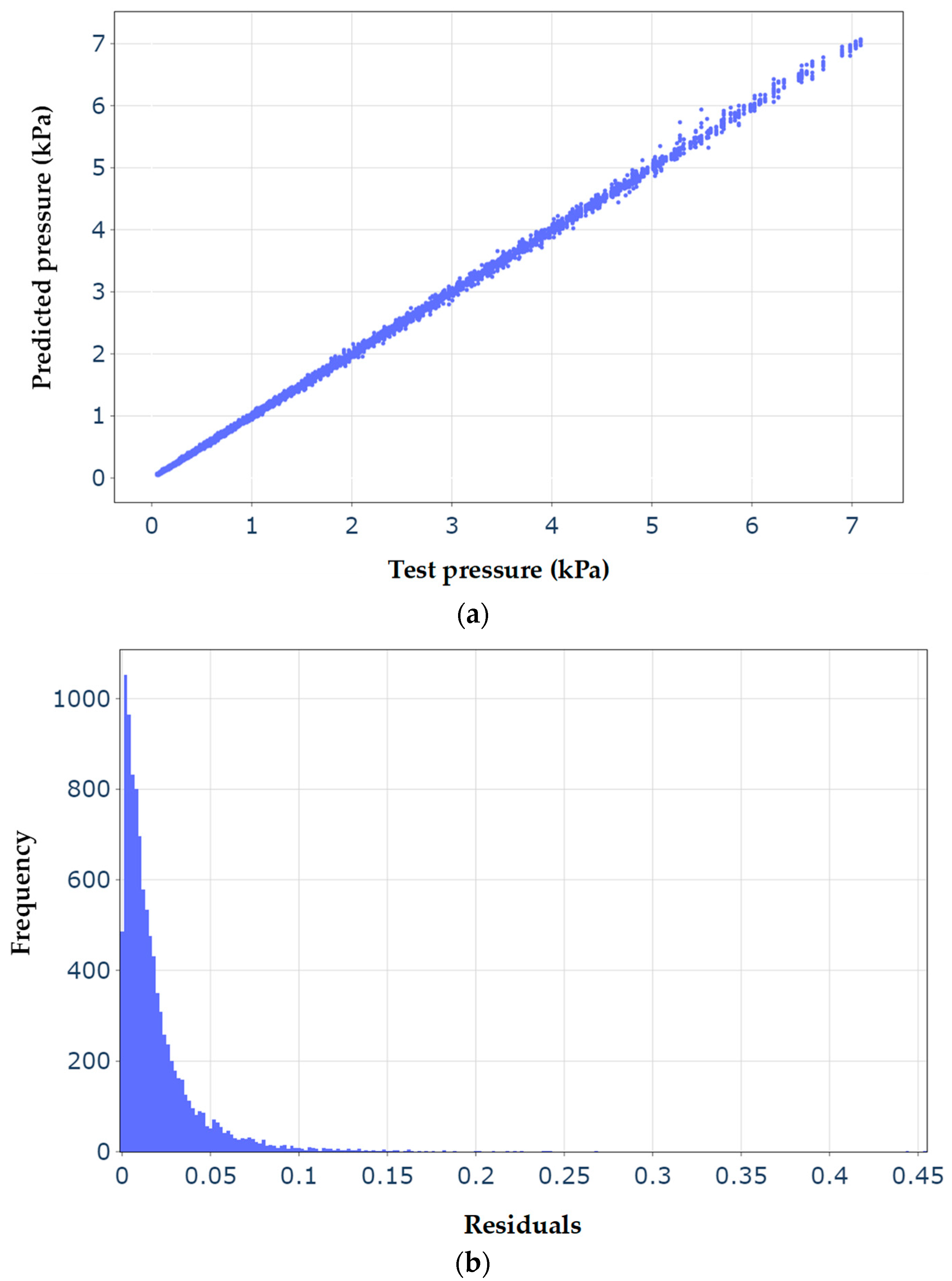
Figure 10a shows the variation in the fluid pressure of the small-scale
spherical inclusion predicted by the best model of the LGBM versus the
reference test fluid pressure obtained by the scale-dependent nonlocal
poroelasticity model. To plot this figure, all 10,230 records of the test dataset
are used to give an overview of the performance of the machine learning model.
In addition, the histogram of the residuals of the fluid pressure within the spherical poroelastic inclusion is described in
Figure 10b. The residuals are
defined as the difference between the predicated and test fluid pressure. It
can be concluded that the predicted fluid pressures closely match those of the
test data almost in all cases. In addition, the majority of residuals are less
than 0.075, providing an additional indicator of the goodness of the optimised
LGBM model.
In the machine
learning model, the fluid pressure at the middle of the inclusion radius is
adopted to train the model and obtain optimised hyperparameters. The optimised
model is then used to make reasonable estimations on unseen new data, as
evidenced by our test data verification outlined above. In practice, there are
two scenarios in which the present model would be useful: (1) When the size of
the inclusion is determined by other imaging techniques such as magnetic
resonance imaging (MRI) or computed tomography (CT); in this case, the model
can be used to determine the inclusion type. For example, in biomedical
applications, the model plays a crucial role in distinguishing benign tumours
from malignant ones by comparing estimated mechanical characteristics with
benchmark data. (2) A trial-and-error procedure for estimating the size of an
inclusion involves systematically adjusting the parameters of a model until a
satisfactory match is achieved between the predicted outcomes and observed
data. In the context of this work’s case study on tumours and interstitial
fluid pressure, this could refer to the process of iteratively refining the
parameters related to the size of the tumour till the predictions align with
experimental or clinical measurements. The present model relates the
interstitial fluid pressure to the mechanical characteristics and size of the
inclusion and could be useful in the iterative process to minimise the
difference between the observation and theoretical estimation. In terms of
proof of possibility, it is noteworthy that experimental studies have
demonstrated that the interstitial fluid pressure is an important biomarker in
solid tumours, significantly affecting the cancer microenvironment [
55]. The clinical measurement
of fluid pressure can be achieved using direct (invasive) techniques such as
servo-controlled micropipette and wick-in-needle, as well as indirect
(non-invasive) methods including ultrasound elastography and dynamic contrast MRI [
56].








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}