


Structural Design of Dual-Type Thin-Film Thermopiles and Their Heat Flow Sensitivity Performance

Abstract
1. Introduction
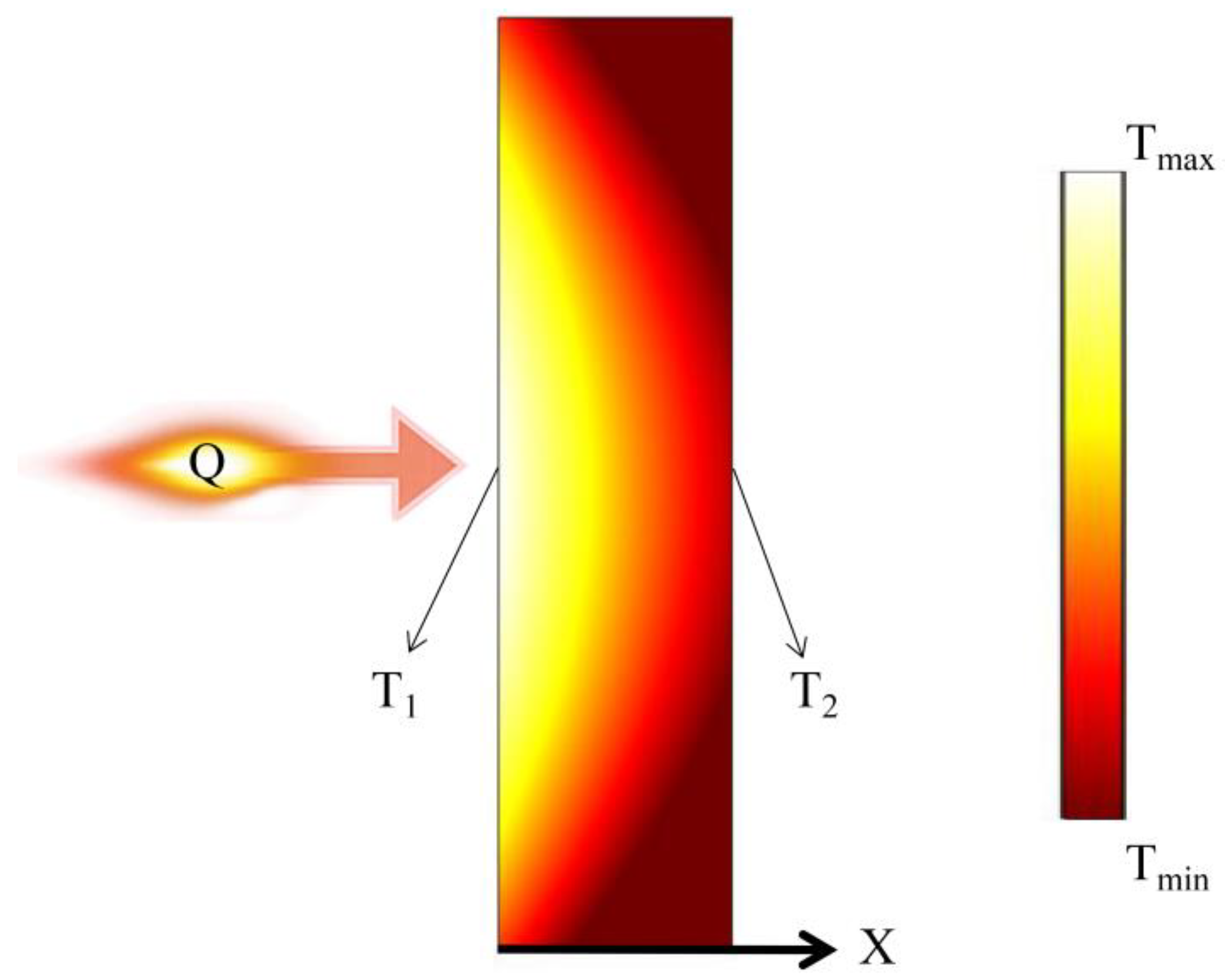
2. Working Principle
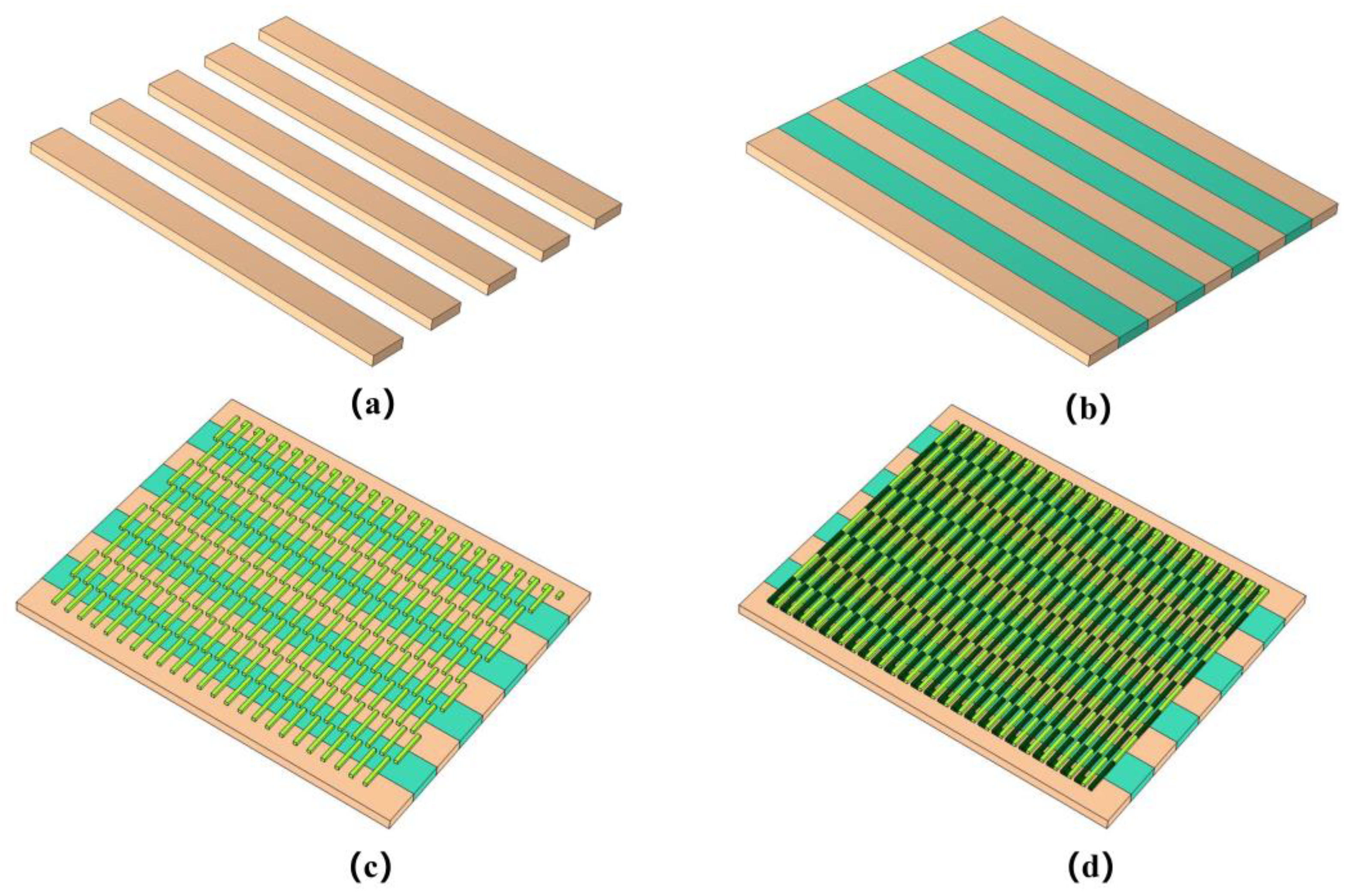
3. Sensor Structure Design
4. Finite Element Simulation Analysis
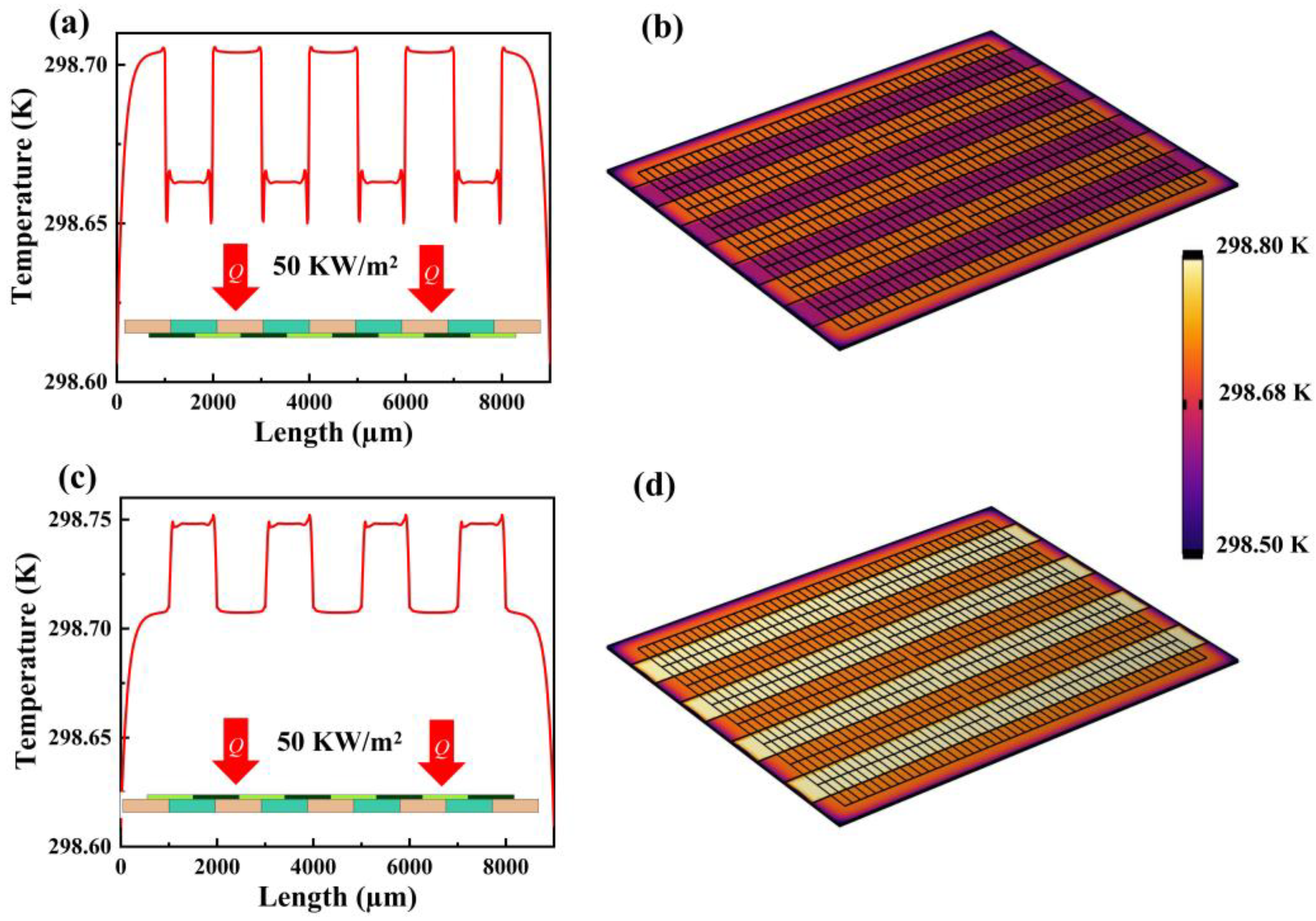
4.1. Effect of Different Thermal Resistance Layer Positions on Heat Flow Measurements
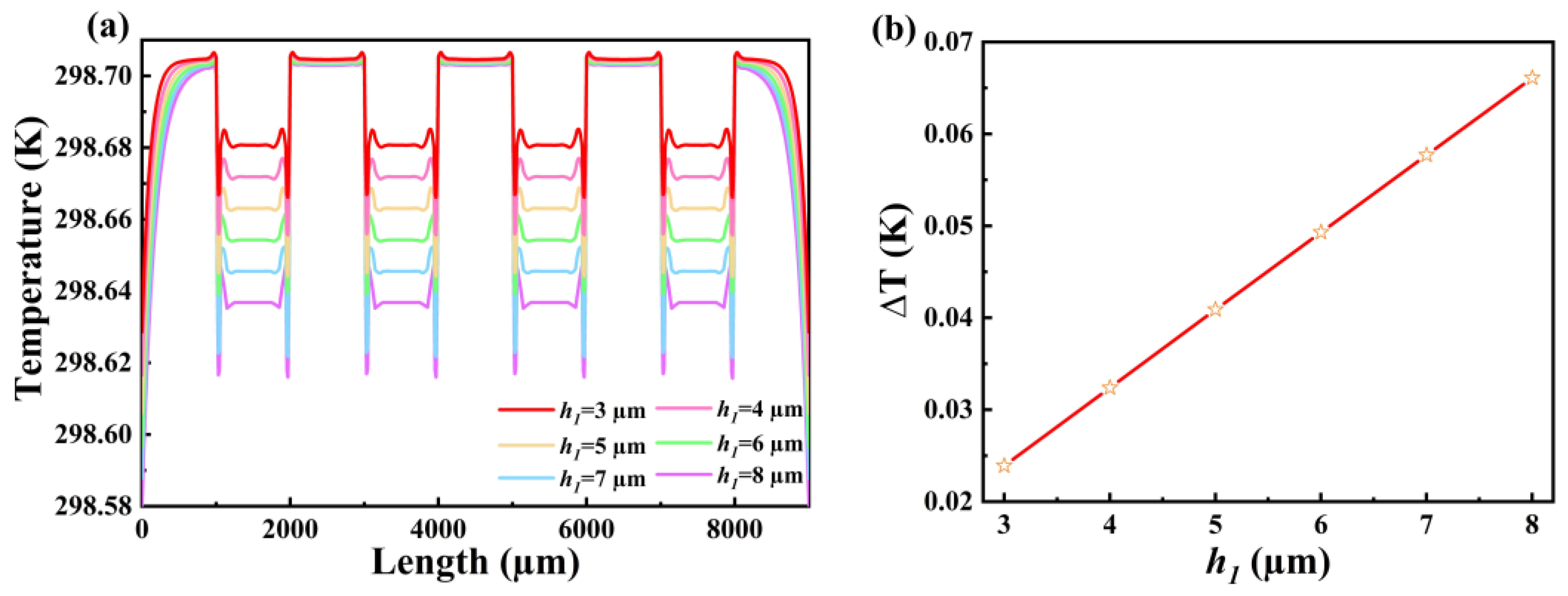
4.2. Effect of Different Thermal Resistance Layer Thicknesses on Heat Flow Measurements
4.3. Effect of Different Heat Flow Densities on Heat Flow Measurements
5. Fabrication and Performance Testing of Heat Flow Sensors
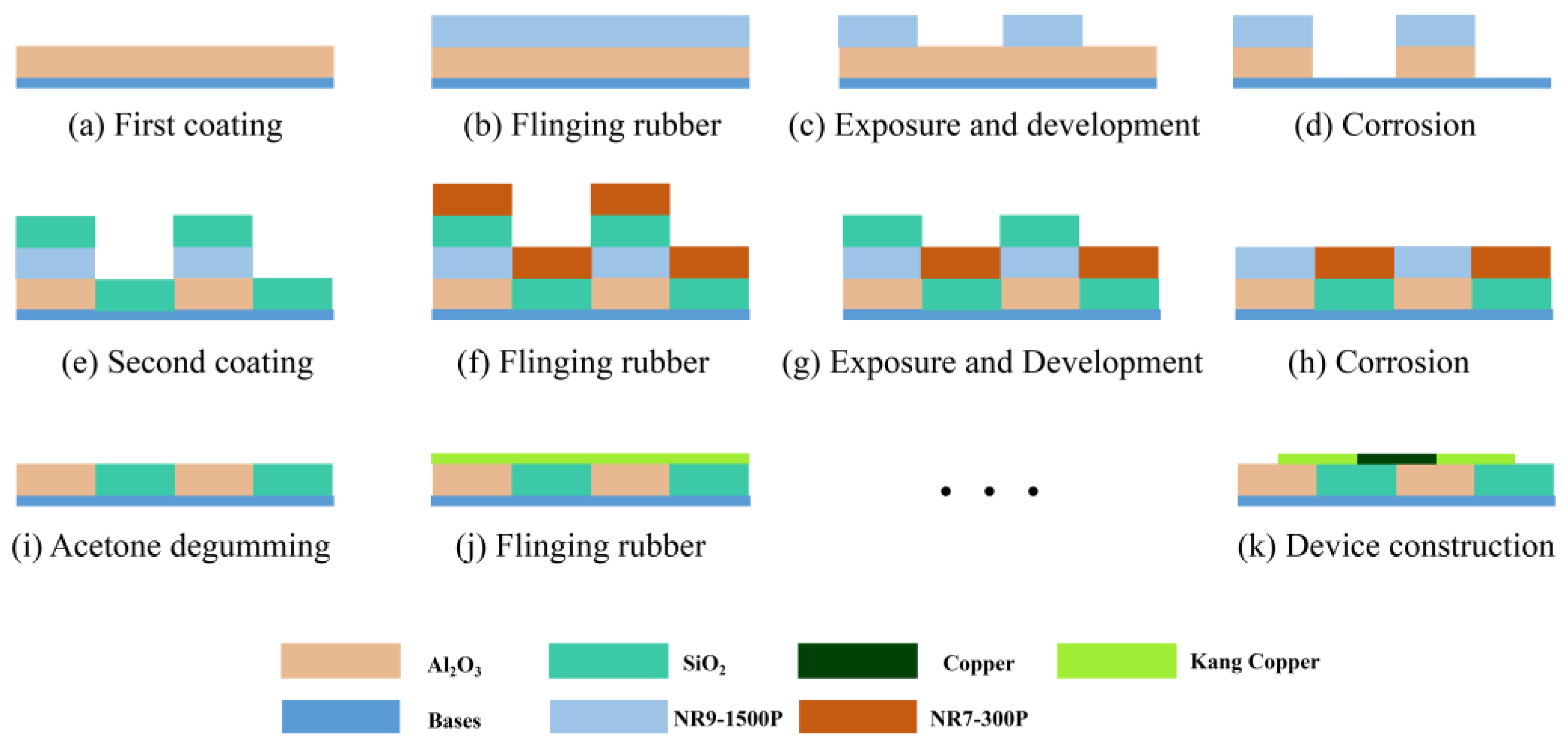
5.1. Heat Flow Sensor Production
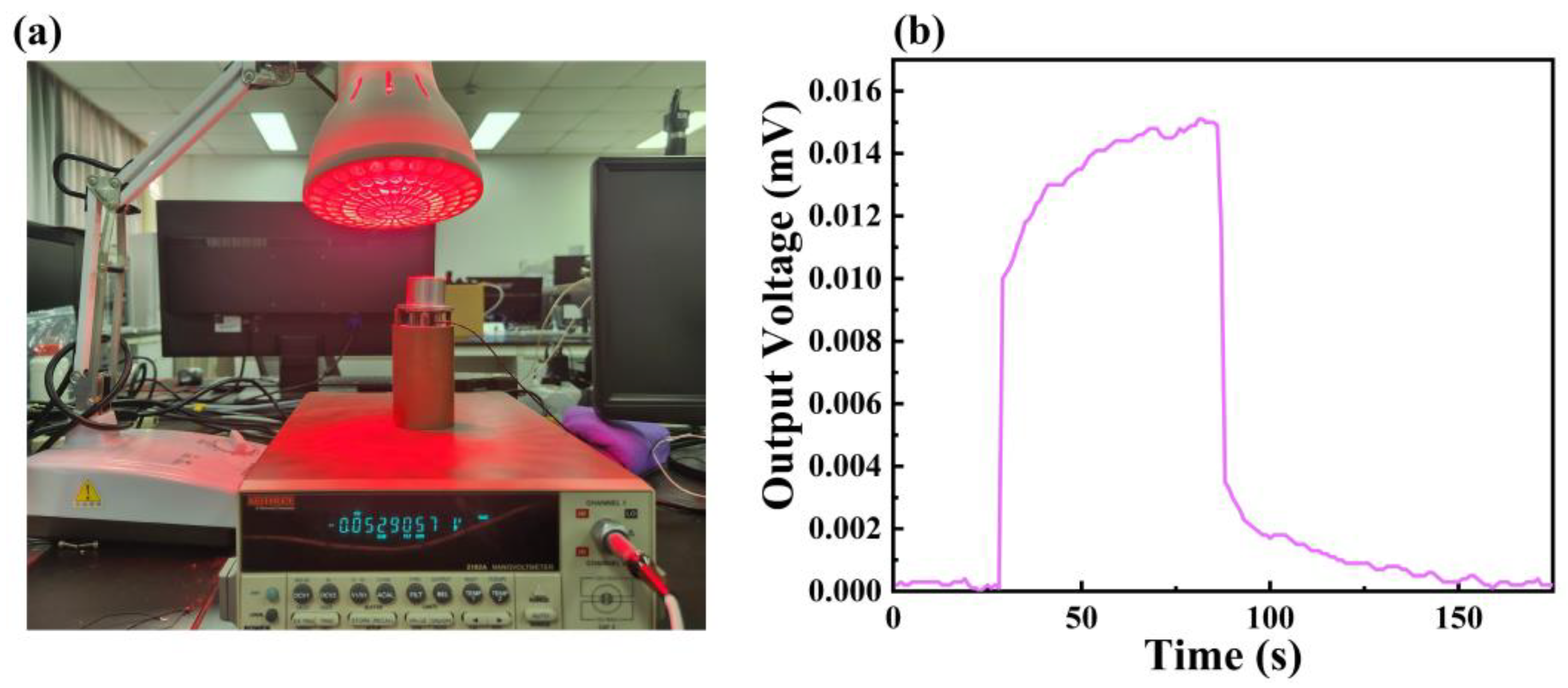
5.2. Performance Testing of Heat Flow Sensors
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Weng, H.; Duan, F.; Ji, Z.; Chen, X.; Yang, Z.; Zhang, Y.; Zou, B. Electrical insulation improvements of ceramic coating for high temperature sensors embedded on aeroengine turbine blade. Ceram. Int. 2020, 46, 3600–3605. [Google Scholar] [CrossRef]
- Zhang, L.; Li, J.; Kou, Y. Research status of aero-engine blade fly-off. J. Phys. Conf. Ser. 2021, 1744, 22124–22125. [Google Scholar] [CrossRef]
- Ji, Z.; Duan, F.; Xie, Z. Transient Measurement of Temperature Distribution Using Thin Film Thermocouple Array on Turbine Blade Surface. IEEE Sens. J. 2020, 21, 207–212. [Google Scholar] [CrossRef]
- Ji, J.; Yan, B.; Wang, B.; Ding, M. Error of Thermocouple in Measuring Surface Temperature of Blade with Cooling Film. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Mersinligil, M.; Desset, J.; Brouckaert, J. High-temperature high-frequency turbine exit flow field measurements in a military engine with a cooled unsteady total pressure probe. Proc. Inst. Mech. Eng. A J. Power Energy 2011, 225, 954–963. [Google Scholar] [CrossRef]
- Ribeiro, L.; Saotome, O.; d’Amore, R.; de Oliveira Hansen, R. High-Speed and High-Temperature Calorimetric Solid-State Thermal Mass Flow Sensor for Aerospace Application: A Sensitivity Analysis. Sensors 2022, 22, 3484. [Google Scholar] [CrossRef]
- Wu, C.; Kang, D.; Chen, P.; Tai, Y. MEMS thermal flow sensors. Sens. Actuators A Phys. 2016, 241, 135–144. [Google Scholar] [CrossRef]
- Fu, X.; Lin, Q.; Peng, Y.; Liu, J.; Yang, X.; Zhu, B.; Ouyang, J.; Zhang, Y.; Xu, L.; Chen, S. High-Temperature Heat Flux Sensor Based on Tungsten–Rhenium Thin-Film Thermocouple. IEEE Sens. J. 2020, 20, 10444–10452. [Google Scholar] [CrossRef]
- Luo, X.; Wang, H. A High Temporal-Spatial Resolution Temperature Sensor for Simultaneous Measurement of Anisotropic Heat Flow. Materials 2022, 15, 5385. [Google Scholar] [CrossRef]
- Balakrishnan, V.; Phan, H.-P.; Dinh, T.; Dao, D.V.; Nguyen, N.-T. Thermal Flow Sensors for Harsh Environments. Sensors 2017, 17, 2061. [Google Scholar] [CrossRef]
- Fu, T.; Zong, A.; Zhang, Y.; Wang, H. A method to measure heat flux in convection using Gardon gauge. Appl. Therm. Eng. 2016, 108, 1357–1361. [Google Scholar] [CrossRef]
- ASTM E511-07; Standard Test Method for Measuring Heat Flux Using a Copper-Constantan Circular Foil, Heat-Flux Transducer. ASTM International: West Conshohocken, PA, USA, 2007.
- Matson, M.L.; Reinarts, T.R. Development and calibration of a thermal model of a Schmidt-Boelter gauge to quantify environmental and installation effects on heat flux measurements for launch vehicles. Am. Inst. Phys. 2002, 608, 119–126. [Google Scholar]
- Sheng, C.; Hua, P.; Cheng, X. Design and calibration of a novel transient radiative heat flux meter for a spacecraft thermal test. Rev. Sci. Instrum. 2016, 87, 064902. [Google Scholar] [CrossRef]
- Song, S.; Wang, Y.; Yu, L. Highly sensitive heat flux sensor based on the transverse thermoelectric effect of YBa2Cu3O7−δ thin film featured. Appl. Phys. Lett. 2020, 117, 123902. [Google Scholar] [CrossRef]
- Zhang, T.; Tan, Q.; Lyu, W.; Xiong, J. Design and Fabrication of a Thick Film Heat Flux Sensor for Ultra-High Temperature Environment. IEEE Access 2019, 7, 180771–180778. [Google Scholar] [CrossRef]
- Zhang, C.; Huang, J.; Li, J.; Yang, S.; Ding, G.; Dong, W. Design, fabrication and characterization of high temperature thin film heat flux sensors. Microelectron. Eng. 2019, 217, 111128. [Google Scholar] [CrossRef]
- Sin, L.; Pan, M.; Tsai, T.; Chou, C. Multifunction thermopile sensors fabricated with a MEMS-compatible process. IEEE Trans. Semicond. Manuf. 2013, 26, 242–247. [Google Scholar] [CrossRef]
- Morisaki, M.; Minami, S.; Miyazaki, K.; Yabuki, T. Direct local heat flux measurement during water flow boiling in a rectangular minichannel using a MEMS heat flux sensor—ScienceDirect. Exp. Therm. Fluid Sci. 2020, 121, 110285. [Google Scholar] [CrossRef]
- Dejima, K.; Nakabeppu, O. Local instantaneous heat flux measurements in an internal combustion engine using a MEMS sensor. Appl. Therm. Eng. 2022, 201, 117747. [Google Scholar] [CrossRef]
- Siroka, S.; Berdanier, R.A.; Thole, K.A.; Chana, K.; Haldeman, C.W.; Anthony, R.J. Comparison of thin film heat flux gauge technologies emphasizing continuous-duration operation. J. Turbomach. 2020, 142, 091001. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, H.; Wang, H.; Guo, S.; E, M.; Ding, W.; Yin, J. Design and Fabrication of a Thermopile-Based Thin Film Heat Flux Sensor, Using a Lead—Substrate Integration Method. Coatings 2022, 12, 1670. [Google Scholar] [CrossRef]
- Singh, S.; Yadav, M.; Khandekar, S. Measurement issues associated with surface mounting of thermopile heat flux sensors. Appl. Therm. Eng. 2017, 114, 1105–1113. [Google Scholar] [CrossRef]
- Prangemeier, T.; Nejati, I.; Müller, A.; Endres, P.; Fratzl, M.; Dietzel, M. Optimized thermoelectric sensitivity measurement for differential thermometry with thermopiles. Exp. Therm. Fluid Sci. 2015, 65, 82–89. [Google Scholar] [CrossRef]
- E, M.; Cui, Y.; Guo, S.; Liu, H.; Ding, W.; Yin, J. Novel lead-connection technology for thin-film temperature sensors with arbitrary electrode lengths. Meas. Sci. Technol. 2023, 34, 065113. [Google Scholar] [CrossRef]
- Wang, M.; Chen, J. Numerical analysis of influence factor on convective heat transfer coefficient about nozzle internal flow. J. Rocket. Propuls. 2011, 37, 32–37. [Google Scholar]
- Abouelregal, A.; Tiwari, R.; Nofal, T. Modeling heat conduction in an infinite media using the thermoelastic MGT equations and the magneto-Seebeck effect under the influence of a constant stationary source. Arch. Appl. Mech. 2023, 93, 2113–2128. [Google Scholar] [CrossRef]
- Hadi, A.-S.; Hill, B.E.; Issahaq, M.N. Performance Characteristics of Custom Thermocouples for Specialized Applications. Crystals 2021, 11, 377. [Google Scholar] [CrossRef]
- Zheng, Z.; Luo, Y.; Yang, H.; Yi, Z.; Zhang, J.; Song, Q.; Yang, W.; Liu, C.; Wu, X.; Wu, P. Thermal tuning of terahertz metamaterial properties based on phase change material vanadium dioxide. Phys. Chem. Chem. Phys. 2022, 24, 8846–8853. [Google Scholar] [CrossRef]
- Zheng, Y.; Yi, Z.; Liu, L.; Wu, X.W.; Liu, H.; Li, G.F.; Zeng, L.C.; Li, H.L.; Wu, P.H. Numerical simulation of efficient solar absorbers and thermal emitters based on multilayer nanodisk arrays. Appl. Therm. Eng. 2023, 230, 120841. [Google Scholar] [CrossRef]
- Chen, H.; Li, W.; Zhu, S.; Hou, A.; Liu, T.; Xu, J.; Zhang, X.; Yi, Z.; Yi, Y.; Dai, B. Study on the Thermal Distribution Characteristics of a Molten Quartz Ceramic Surface under Quartz Lamp Radiation. Micromachines 2023, 14, 1231. [Google Scholar] [CrossRef]
- Sharma, E.; Rathi, R.; Misharwal, J.; Sinhmar, B.; Kumari, S.; Dalal, J.; Kumar, A. Evolution in Lithography Techniques: Microlithography to Nanolithography. Nanomaterials 2022, 12, 2754. [Google Scholar] [CrossRef] [PubMed]
- Meisak, D.; Plyushch, A.; Macutkevič, J.; Grigalaitis, R.; Sokal, A.; Lapko, K.N.; Selskis, A.; Kuzhir, P.P.; Banys, J. Effect of temperature on shielding efficiency of phosphate-bonded CoFe2O4–xBaTiO3 multiferroic composite ceramics in microwaves. J. Mater. Res. Technol. 2023, 24, 1939–1948. [Google Scholar] [CrossRef]
- Duan, F.; Chen, K.; Yu, Y. High-speed and low-power thermally tunable devices with suspended silicon waveguide. Opt. Quantum Electron. 2020, 52, 5. [Google Scholar] [CrossRef]
- Mineo, G.; Moulaee, K.; Neri, G.; Mirabella, S.; Bruno, E. Mechanism of Fast NO Response in a WO3-Nanorod-Based Gas Sensor. Chemosensors 2022, 10, 492. [Google Scholar] [CrossRef]
- Sheikhnejad, Y.; Bastos, R.; Vujicic, Z.; Shahpari, A.; Teixeira, A. Laser Thermal Tuning by Transient Analytical Analysis of Peltier Device. IEEE Photonics J. 2017, 93, 1–13. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Description of Parameters | Parameter Values |
|---|---|---|
| Q | Heat flow density | 50 KW/m2 |
| h1 | Thickness of thermal resistance layer | 5 μm |
| h2 | Thermoelectric stack thickness | 1 μm |
| L | Length of thermal resistance layer | 1 μm |
| a | Width of Al2O3 | 1000 μm |
| b | Width of SiO2 | 1000 μm |
| c | Thermocouple length | 100 μm |
| N | Number of thermocouples | 200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Liu, T.; Feng, N.; Shi, Y.; Zhou, Z.; Dai, B. Structural Design of Dual-Type Thin-Film Thermopiles and Their Heat Flow Sensitivity Performance. Micromachines 2023, 14, 1458. https://doi.org/10.3390/mi14071458
Chen H, Liu T, Feng N, Shi Y, Zhou Z, Dai B. Structural Design of Dual-Type Thin-Film Thermopiles and Their Heat Flow Sensitivity Performance. Micromachines. 2023; 14(7):1458. https://doi.org/10.3390/mi14071458
Chicago/Turabian StyleChen, Hao, Tao Liu, Nanming Feng, Yeming Shi, Zigang Zhou, and Bo Dai. 2023. "Structural Design of Dual-Type Thin-Film Thermopiles and Their Heat Flow Sensitivity Performance" Micromachines 14, no. 7: 1458. https://doi.org/10.3390/mi14071458
APA StyleChen, H., Liu, T., Feng, N., Shi, Y., Zhou, Z., & Dai, B. (2023). Structural Design of Dual-Type Thin-Film Thermopiles and Their Heat Flow Sensitivity Performance. Micromachines, 14(7), 1458. https://doi.org/10.3390/mi14071458